Предлагаемое устройство относится к области измерительной техники и может быть использовано в станкостроении, приборостроении, робототехнике, в частности, различных углоизмерительных устройствах, устанавливаемых и работающих на космических аппаратах (КА), предназначенных для точного определения направления осей КА на астроориентир в приборной системе координат.
В настоящее время для решения задачи индикации положения осей КА получили распространение современные звездные приборы - измерители углов трехосной ориентации, которые определяют угловые координаты не отдельной звезды, а углы трехосной ориентации в приборной системе координат относительно мировой системы координат (см., например, Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. - М.: Логос, стр. 156-160).
Задачу определения (измерения) трехосной ориентации одного твердого тела относительно другого можно решать по-разному:
- использовать два разных датчика угла поворота: один обычный двумерный фотоэлектрический автоколлиматор с матричным приемником излучения (МПИ) (см., например, Бондаренко И.Д. Принципы построения фотоэлектрических автоколлиматоров. - Мн.: Изд. «Университетское», 1984, стр. 5-9, 21-24), а другой датчик угла поворота для решения одномерной задачи измерения плоского угла (см. Дукаревич Ю.Е., Дукаревич М.Ю. «Абсолютный преобразователь угла (варианты), патент РФ №2419067, публ. 20.05.2011);
- использовать специализированный прибор для определения трехосной ориентации одного твердого тела относительно другого.
В настоящее время получили распространение датчики угла поворота (ДУП) (фотоэлектрические цифровые преобразователи угла), использующие кодовые и растровые преобразования (см., например, Преснухин Л.Н. и др. «Фотоэлектрические преобразователи информации». - М.: Машиностроение, 1974, стр. 301-304), но эти датчики не обеспечивают высокой угловой чувствительности и минимальных габаритных параметров.
Известен измеритель угла, выполненный в соответствии с новой концепцией измерения, основанный на определении углового положения изображения оптической марки на светочувствительной матрице цифровой камеры с использованием алгоритмов обработки изображений и специальных алгоритмов обработки данных (Королев А.Н., Лукин А.Я., Полищук Г.С. «Новая концепция измерения угла. Модельные и экспериментальные исследования», Оптический журнал, 2012, т. 79, №6, стр. 52-58), что делает актуальной задачу уменьшения габаритов таких датчиков при одновременном увеличении их точности.
С указанной точки зрения наибольший интерес представляет малогабаритный датчик угла (патент РФ №2419067, публ. 20.05.2011), содержащий контрольный элемент, закрепленный на контролируемом объекте, источник света, сигнальную маску с прозрачной щелью, расположенной в фокальной плоскости объектива, и приемный узел, включающий объектив, в фокальной плоскости которого установлена приемная матрица, выходом подключенная к персональному компьютеру, осуществляющему определение угла разворота контрольного элемента по пространственному положению изображения светящейся щели относительно приемной матрицы, либо содержащий контрольный элемент, закрепленный на контролируемом объекте, состоящий из сигнальной маски с зеркальным штрихом, и приемный узел, включающий осветитель с источником света для подсветки сигнальной маски, и приемный объектив, строящий изображение зеркального штриха в плоскости приемной матрицы, выход которой подключен к персональному компьютеру или контроллеру, осуществляющему определение угла разворота контрольного элемента по пространственному положению изображения зеркального штриха относительно приемной матрицы.
В данном техническом решении формулируется подход к измерению углов, основанный на использовании двумерных матричных фотоприемных устройств (МФПУ) для решения одномерной задачи измерения плоского угла. Такой подход позволяет уменьшить размеры измерительного устройства (датчика угла поворота) перпендикулярно оси его вращения и существенно снизить погрешность измерения за счет высокого уровня усреднения большого количества одиночных отсчетов.
К недостаткам вышеуказанного технического решения следует отнести:
- погрешность измерения положения энергетического центра изображения на матрице из-за шумов и других факторов, присущих МФПУ, составляющая долю от размера пикселя (приведенное в патенте РФ №2419067 значение погрешности в 0,03 от размера пикселя можно рассматривать как предельное); с учетом того, что количество строк (столбцов) МФПУ также ограничено, существенно повысить точность такого типа малогабаритных датчиков угла поворота (на основе МФПУ) не представляется возможным;
- расфокусировку изображения на МФПУ, связанную с изменением расстояния между контролируемым объектом (сигнальной маской) и измерительным блоком, приводящую к соответствующему ухудшению точности датчика.
В настоящее время среди известных датчиков угла поворота такого типа для решения одномерной задачи определения плоского угла наиболее близким к заявляемому по технической сущности и достигаемому результату является техническое решение, описанное в патенте РФ №2569072, 17.09.2013, выбранное в качестве прототипа, в котором устранены вышеуказанные недостатки аналога
Известный прототип содержит осветитель с маской, измерительный блок, включающий МФПУ, оптически сопряженное с маской, и светоделитель, расположенный между объективом и МФПУ, при этом маска установлена перед светоделителем в фокальной плоскости объектива, МФПУ подключено к электронному блоку, а кроме вышеуказанного устройство содержит контролируемый объект, установленный с возможностью поворота относительно измерительного блока, на котором закреплен дополнительный оптический элемент, выполненный в виде двойного зеркала с прямым углом между его зеркалами, обращенными к объективу, причем ребро между зеркалами двойного зеркала перпендикулярно оптической оси объектива, а ось поворота контролируемого объекта и плоскость симметрии двойного зеркала параллельны оптической оси объектива.
Недостатком прототипа является то, что он так же, как и аналог, решает одномерную задачу измерения плоского угла.
В то же время создание единого малогабаритного устройства трехосной ориентации, совмещающего в себе функции автоколлиматора и датчика угла поворота, весьма привлекательно и особенно актуально для бортовой аппаратуры КА, к которой предъявляются требования по минимизации габаритно-массовых характеристик и достижению высоких точностей.
Задачей, на решение которой направлено предлагаемое изобретение, является создание принципиально нового малогабаритного высокоточного прибора для определения трехосной ориентации одного твердого тела относительно другого (далее - ДУП трехосной ориентации) при обеспечении отсутствия расфокусировки изображения.
Данная задача решается за счет того, что в заявленном датчике угла поворота, выполненном в виде фотоэлектрического автоколлиматора, содержащем объектив, в фокальной плоскости которого установлен матричный приемник излучения, выходом подключенный к электронному блоку, светоделитель, расположенный перед матричным приемником излучения, осветитель с источником света, предназначенный для подсветки сигнальной маски с прозрачным штрихом, установленной перед светоделителем в фокальной плоскости объектива, и двойное зеркало, представляющее собой контролируемый объект - призму БР-180°, обращенную прозрачной входной гранью к объективу, при этом на входную грань призмы нанесено зеркальное покрытие, выполненное в виде симметрично расположенного круга, осветитель снабжен дополнительным источником света, светоделителем и апертурными диафрагмами, оптически сопряженными с входной гранью призмы посредством конденсора, причем первая диафрагма выполнена в виде круглого прозрачного отверстия, а вторая имеет вид прозрачного кольца, при этом диаметр изображения первой апертурной диафрагмы меньше диаметра круга зеркального покрытия, а внутренний диаметр изображения прозрачного кольца второй диафрагмы больше диаметра круга зеркального покрытия.
Состав конструктивных элементов, их взаимное расположение, взаимодействие, форма и соотношение образуемых геометрических фигур, а также материал, применяемый в виде слоя, наносимого на конструктивные элементы, характеризуют объект - устройство в целом и обуславливают его воспроизводимость, а также обеспечивают достижение технического результата.
Технический результат, обеспечиваемый приведенной совокупностью признаков, выражается в повышении точности угловых измерений малогабаритного ДУП трехосной ориентации контролируемого объекта при обеспечении его малых массы и габаритов, что достигается благодаря формированию двух оптических независимых функциональных каналов с общей визирной линией. При этом один канал (угла поворота) измеряет угол поворота призмы БР-180° вокруг общей визирной линии, а другой канал (автоколлимационный) определяет углы отклонения к входной грани призмы БР-180° относительно общей визирной линии устройства.
Сущность изобретения поясняется чертежами, на которых изображено:
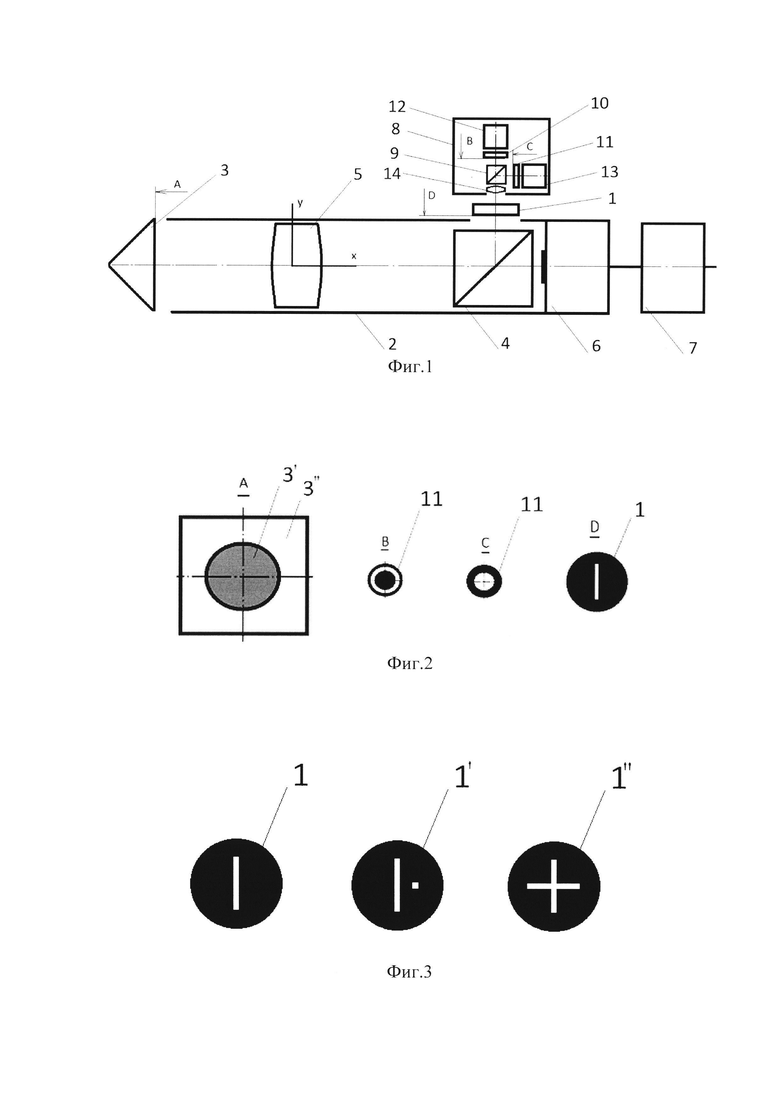
на фиг. 1 - общий вид датчика угла поворота;
на фиг. 2 - вариант выполнения сетки на маске;
на фиг. 3 - варианты сеток на маске.
Предлагаемое изобретение (датчик угла поворота), представленное на фиг. 1, состоит из сигнальной маски 1 с нанесенной сеткой, содержащей прозрачный штрих (см. фиг. 2, вид D), неподвижного измерительного блока 2, выполненного в виде фотоэлектрического автоколлиматора, включающего контролируемый подвижный объект 3, представляющий собой призму БР-180°. На входную грань призмы 3 нанесено зеркальное покрытие, выполненное в виде симметрично расположенного круга 3', остальная часть входной грани имеет просветляющее покрытие 3'' (см. фиг. 2, вид А). Кроме того, в блок 2 входит светоделитель 4, расположенный между объективом 5 и МПИ 6 за сигнальной маской 1, установленной перед светоделителем 4 в фокальной плоскости объектива 5. Матрица МПИ 6, выходом подключенная к электронному блоку 7, оптически сопряжена с сигнальной маской 1, поэтому МПИ 6 совмещен с фокальной плоскостью объектива 5, при этом сигнальная маска 1 установлена так, что ее ось симметрии перпендикулярна оптической оси датчика и совмещена с центром светоделителя 4, а рисунок сигнальной маски 1 всегда содержит прозрачный штрих (см. фиг. 2, вид D). Сигнальная маска освещается осветителем 8, в котором размещены дополнительно светоделитель 9 и две апертурные диафрагмы 10, 11 с соответствующими подсветками 12, 13. Апертурные диафрагмы оптически сопряжены с входной гранью призмы посредством конденсора 14, причем диафрагма 11 выполнена в виде круглого прозрачного отверстия (см. фиг. 2, вид С), а диафрагма 10 в виде прозрачного кольца (см. фиг. 2, вид В). При этом диаметр изображения прозрачного отверстия меньше диаметра круглого зеркального слоя 3' на входной грани призмы 3, а внутренний диаметр изображения прозрачного кольца больше диаметра круглого зеркального слоя 3'.
По составу признаков измерительный блок 2 аналогичен обычному фотоэлектрическому автоколлиматору. Светоделитель 4 может быть выполнен в виде светоделительной куб-призмы, светоделительная плоскость которой расположена под углом 45° к оптической оси объектива 5.
Конструкция подсветок 12, 13 представляет собой, например, источники излучения с молочным стеклом.
В состав электронного блока 7 входит персональный компьютер с монитором.
Кроме вышесказанного на фиг. 1 приведена система координат (СК) XYZ - это СК измерительного блока 2. Ось X проходит через общую визирную линию измерительного блока 2, а плоскость, образованная осями YZ, параллельна матрице пикселей МПИ 6.
Таким образом, предлагаемое изобретение (датчик угла поворота) представляет собой двухканальную систему. Канал I (автоколлимационный канал) состоит из следующих элементов: 13, 11, 9, 14, 1, 4, 5, 3', 5, 4, 6, 7. В канал II (угла поворота) входят элементы 12, 10, 9, 14, 1, 4, 5, 3'', 5, 4, 6, 7.
Описанное устройство предназначено для решения задачи определения трехосной ориентации призмы БР-180° относительно неподвижного измерительного блока 2. То есть канал II производит измерение угла поворота γ ребра призмы БР-180° относительно СК XYZ при ее повороте вокруг оси X, а канал I измеряет углы δ, ε, где δ - угол поворота нормали к входной грани призмы 3 вокруг оси Y, ε - угол поворота нормали к входной грани призмы 3 вокруг оси Z. СК YZ - это СК матрицы пикселей МПИ. Ее начало расположено в центре матрицы пикселей МПИ и через него проходят оптическая ось объектива 5 и визирная ось датчика угла поворота.
Если линейный размер матрицы пикселей МПИ равен А×А, то угловое поле канала I (автоколлиматора) будет 2W×2W, а максимальные значения углов δmax=εmax=W/2. Для максимального значения угла γ физических ограничений нет (γ≥360°).
На фиг. 3 представлены три варианта сеток предлагаемого устройства (варианты 1, 1', 1''). Вариант 1 (фиг. 3) представляет одиночную прозрачную щель (такую же, как в прототипе). Этот вариант наиболее удобен при работе канала II (угла поворота) устройства. Однако при работе канала I (автоколлимационного канала) необходимо определять положение центроиды (центра тяжести) изображения указанной одиночной прозрачной щели на матрице МПИ. Это изображение имеет относительно большую площадь и перекрывает большое количество пикселей матрицы МПИ, что приводит при определении положения центра тяжести этого изображения к нерациональным временным затратам. Вариант 1' (фиг. 3) помимо одиночной прозрачной щели имеет прозрачную точечную диафрагму, изображение которой на матрице занимает примерно 2×2 или 3×3 пикселя. Алгоритм обработки изображений для этой сетки несколько усложняется. При работе канала II (угла поворота) устройства обеспечивается опознание и виртуальное исключение электрических сигналов изображения прозрачной точечной диафрагмы, а при работе канала I (автоколлимационного канала) на растре пикселей МПИ вокруг изображения прозрачной точечной диафрагмы организуется виртуальное окно, с помощью которого происходит определение координат центра тяжести изображения указанной диафрагмы. Изображение одиночной прозрачной щели всегда расположено вне указанного виртуального окна. Вариант 1'' (фиг. 3) выполнен в виде прозрачного креста, длина штрихов которого меньше длины штриха в варианте 1, но при этом суммарная длина штрихов больше длины штриха в варианте 1. Ширина штрихов прозрачного креста для их опознания (различения) может быть разной. Вариант 1'' позволяет увеличить измеряемые углы δ, ε, где, как отмечено выше, δ - угол поворота нормали к входной грани призмы 3 вокруг оси Y, ε - угол поворота нормали к входной грани призмы 3 вокруг оси Z. Алгоритм обработки изображения этой сетки также несколько усложняется. При работе канала II (угла поворота) устройства обеспечивается опознание и раздельное измерение угла поворота каждого штриха креста с последующим вычислением общего угла поворота креста γ. При работе канала I (также как в варианте 1) необходимо определять положение центроиды (центра тяжести) изображения указанного прозрачного креста на матрице МПИ 6. Таким образом, в зависимости от условий и решаемых задач вид сетки может быть разным. В дальнейшем для простоты и наглядности изложения будем рассматривать сетку варианта 1 (фиг. 3).
При работе канала I (автоколлимационного канала) по призме БР-180° бликов от нее не возникает. При работе канала II (угла поворота) по призме БР-180° от ее преломляющей поверхности появляются блики. Для их подавления на прозрачную часть входной грани призмы нанесено просветляющее покрытие. Если подсветка 12 излучает монохроматический свет с длиной волны λ, то наилучшим просветляющим покрытием является двухслойное с рабочей длиной волны λ. Современные двухслойные просветляющие покрытия технологичны и при работе на длине волны λ имеют минимальный коэффициент отражения. Для борьбы с остаточным влиянием бликов возможно применение известного метода амплитудной селекции.
Поскольку заявленный современный статический звездный прибор работает по группе звезд, находящихся в его угловом поле, то рассмотрена работа предлагаемого двухканального датчика угла поворота на примере определения во времени взаимной трехосной ориентации космического телескопа и звездного прибора астроориентации, размещенных на одном космическом аппарате (КА). При этом отметим, что при эксплуатации космического аппарата под влиянием ряда дестабилизирующих факторов деформация его геометрической схемы в ряде случаев может составлять единицы угловых минут. Например, при переходе КА с неосвещенной Солнцем части его орбиты на освещенную температура на поверхности КА изменяется более чем на 100°С. Или КА собирают на Земле в условиях силы тяжести, а эксплуатируют в невесомости, в результате чего при выводе их на орбиту они получают значительные и разнообразные механические воздействия. Это также может нарушать геометрическую схему КА. Стабильность геометрической схемы космического телескопа и звездного прибора астроориентации обеспечивается специальными конструктивными приемами. Например, призма БР-180° и измерительный блок соответственно жестко закреплены на космическом телескопе и звездном приборе астроориентации, или другой вариант - призма БР-180° и измерительный блок соответственно жестко закреплены на звездном приборе астроориентации и космическом телескопе. При номинальной геометрии ребро двойного зеркала перпендикулярно оптической оси объектива 5.
Датчик угла поворота работает следующим образом (фиг. 1). Каналы I, II работают попеременно. При работе автоколлимационного канала (канала I) свет (лучи) от подсветки 13, пройдя апертурную диафрагму 11, отразившись от светоделителя 9, пройдя конденсор 14, освещает сигнальную маску 1. Затем указанный свет (лучи), пройдя прозрачный штрих сигнальной маски 1, отразившись от светоделителя 4 и выйдя из объектива 5 в виде параллельного пучка лучей, освещает круглый зеркальный слой 3' на входной грани призмы 3. При этом ни один луч не попадает на прозрачную часть входной грани призмы БР-180° 3. Затем параллельные лучи, отразившись от зеркала 3', фокусируются объективом 5 и, пройдя куб-призму 4, строят на матрице пикселей МПИ изображение штриха сигнальной маски 1. При наклоне призмы БР-180° 3 (в том числе и при ее повороте на угол γ) координаты центра тяжести изображения штриха в СК YZ будут равны

где f' - фокусное расстояние объектива 5, а δ и ε - измеряемые углы, в силу их малости представленные в радианах.
Далее посредством электронного блока 7 по измеренным данным определяются координаты центроида изображения штриха сигнальной маски 1 на плоскости пикселей МПИ 6 в системе координат YZ по известным формулам определения центра тяжести изображения (см., например, Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. - М.: Логос, 2007, стр. 122-123).
Затем вычисляются искомые углы δ, ε на основе формул (1).

Величины погрешностей измерений каналов I, II целесообразно делать соизмеримыми (равными). Погрешность измерений канала II определяется в основном параметрами МПИ (см. патент РФ №2419067, 20.05.2011, формулы (2), (3)).
Погрешность измерений канала I (α) при выбранном МПИ определяется в основном величиной фокусного расстояния объектива 5 и погрешностью определения координаты энергетического центра изображения штриха на МПИ. Примем как в пат.№2419067, что погрешность измерений канала II α=0,2''(~0,000001 рад.), размер пикселя 3÷5 мкм, погрешность определения координаты энергетического центра изображения штриха на МПИ (μ) равна 0,03 от размера пикселя (0,03×0,003 = 0,00009 мм, 0,03×0,005 = 0,00015 мм). Фокусное расстояние объектива 5 определяется выражением f'=μ/2α. Откуда для пикселя размером 3 мкм f'=45 мм, а для пикселя размером 5 мкм f'=75 мм. Таким образом, определенные значения f' для соответствующих размеров пикселей обеспечивают равенство погрешностей измерений каналов I и II. В ряде случаев (например, при значительном расстоянии между призмой БР-180° и измерительным блоком 2) угловое поле автоколлиматора необходимосущественно уменьшать, увеличивая значение f', определенное по вышеприведенному выражению.
Будем считать, что все систематические ошибки датчика угла поворота выявлены и исключены на этапе калибровки (с точностью используемых эталонных устройств). Поэтому точность измерений канала I этого датчика определяется заданной величиной α.
Следует отметить, что в пространстве между объективом 5 и призмой БР-180° организован параллельный ход лучей, что, соответственно, обеспечивает реализацию нечувствительности (нерасстраиваемости) датчика угла поворота (в режиме автоколлиматора) к изменению расстояния между контролируемым объектом 3 и измерительным блоком 2. При этом указанный параллельный ход лучей обеспечивает также нерасстраиваемость датчика угла поворота к смещениям контролируемого объекта 3 относительно измерительного блока 2 и, в частности, к эксцентриситету оси вращения контролируемого объекта 3 относительно блока 2.
При работе канала угла поворота (канала II) свет (лучи) от подсветки 12, пройдя соответствующую апертурную диафрагму 10, дополнительный светоделитель 9 и конденсор 14, освещает сигнальную маску 1. Затем указанный свет (лучи), пройдя прозрачный штрих сигнальной маски 1, отразившись от светоделителя 4 и выйдя из объектива 5 в виде параллельного пучка лучей, освещает входную грань призмы БР-180° 3. При этом ни один луч не попадает на зеркало 3'. Далее параллельные лучи, отразившись от двойного зеркала, фокусируются объективом 5 и, пройдя куб-призму 4, строят на матрице пикселей МПИ изображение штриха сигнальной маски 1. При повороте призмы БР-180° 3 на угол γ изображение штриха повернется на МПИ на угол 2γ=ϕ. С помощью электронного блока 7 производится определение координаты x0j, энергетического центра каждой части изображения штриха в каждой строке матрицы пикселей МПИ 6. Таким образом, количество измерений равно количеству строк МПИ (или при большем угле - количеству его столбцов). Далее по алгоритму, представленному в патенте РФ №2419067, в электронном блоке 7 производится вычисление угла γ по формуле γ=ϕ/2, где ϕ - угол поворота изображения штриха на МПУ 6.
Как показали проведенные исследования, по известной программе расчетов оптических систем Zemax при наклоне в единицы угловых минут призмы БР-180° 3 (нормали к входной грани призмы 3) при ее вращении угол поворота изображения штриха сигнальной маски на МПИ ϕ практически никак не отличается от величины 2γ. Зависимость величина ϕ для двойного зеркала в обобщенном виде приведена в известной книге Г.В. Погарева («Юстировка оптических приборов»). Призма БР-180° является частным случаем двойного зеркала, у которого угол между его отражающими гранями равен 90°. Для малых углов γ указанная зависимость для призмы БР-180° вырождается в формулу ϕ=2γ sin (90°-υ), где υ - угол поворота нормали к входной грани призмы БР-180° относительно оси X. Для рассматриваемой задачи υ<10', γ<10'. При υ=10' величина ϕ=2γ×0,999997, что при γ=10' ϕ=19,99994'=19'59,9964''. Таким образом, полученное значение ϕ практически никак не отличается от величины 2γ.
Как было отмечено в описании прототипа, в пространстве между объективом 5 и призмой БР-180° организован параллельный ход лучей, что, соответственно, обеспечивает реализацию нечувствительности (нерасстраиваемости) датчика угла поворота в режиме канала II к изменению расстояния между контролируемым объектом 3 и измерительным блоком 2. При этом указанный параллельный ход лучей обеспечивает также нерасстраиваемость датчика угла поворота к смещениям контролируемого объекта 3 относительно измерительного блока 2 и, в частности, к эксцентриситету оси вращения контролируемого объекта 3 относительно блока 2.
Современная элементная база оптоэлектроники обеспечивает высокое быстродействие подобных оптико-электронных приборов (единицы миллисекунд). Поэтому можно считать, что предлагаемое двухканальное устройство работает практически в реальном масштабе времени.
Таким образом, предлагаемое устройство обеспечивает:
- новые функциональные возможности (решение задачи определения трехосной ориентации одного объекта относительно другого в реальном масштабе времени);
- существенное повышение точности угловых измерений при решении задачи определения трехосной ориентации;
- надежную работу прибора при эксплуатации, т.к. устройство имеет свойство нерасстраиваемости;
- небольшие массогабаритные характеристики (один прибор меньше двух);
- расширение области применения датчика угла поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2013 |
|
RU2569072C2 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| Скоростной киносъемочный аппарат с непрерывным движением пленки | 1987 |
|
SU1500978A2 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2013 |
|
RU2554599C1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
Изобретение относится к области измерительной техники. Датчик угла поворота, выполненный в виде фотоэлектрического автоколлиматора, содержит объектив, в фокальной плоскости которого установлен матричный приемник излучения, выходом подключенный к электронному блоку, светоделитель, расположенный перед матричным приемником излучения, осветитель с источником света, предназначенный для подсветки сигнальной маски с прозрачным штрихом, установленной перед светоделителем в фокальной плоскости объектива, и двойное зеркало, представляющее собой контролируемый объект - призму БР-180°, обращенную прозрачной входной гранью к объективу. На входную грань призмы нанесено зеркальное покрытие, выполненное в виде симметрично расположенного круга. Осветитель снабжен дополнительным источником света, светоделителем и апертурными диафрагмами, оптически сопряженными с входной гранью призмы посредством конденсора. Первая диафрагма выполнена в виде круглого прозрачного отверстия, а вторая имеет вид прозрачного кольца. Диаметр изображения первой апертурной диафрагмы меньше диаметра круга зеркального покрытия, а внутренний диаметр изображения прозрачного кольца второй диафрагмы больше диаметра круга зеркального покрытия. Технический результат - повышение точности угловых измерений датчика при обеспечении его малых массы и габаритов. 3 ил.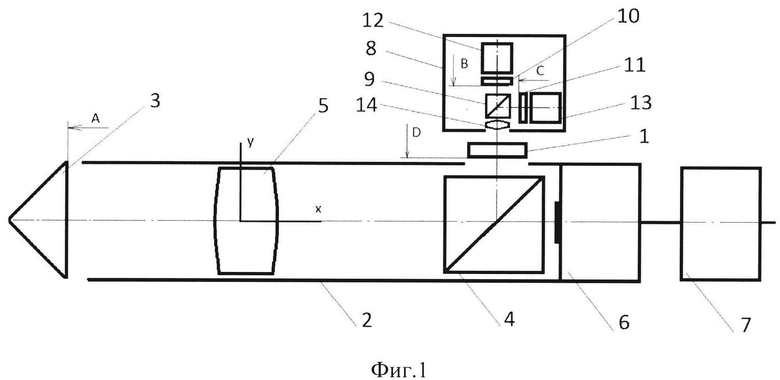
Датчик угла поворота, выполненный в виде фотоэлектрического автоколлиматора, содержащий объектив, в фокальной плоскости которого установлен матричный приемник излучения, выходом подключенный к электронному блоку, светоделитель, расположенный перед матричным приемником излучения, осветитель с источником света, предназначенный для подсветки сигнальной маски с прозрачным штрихом, установленной перед светоделителем в фокальной плоскости объектива, и двойное зеркало, представляющее собой контролируемый объект - призму БР-180°, обращенную прозрачной входной гранью к объективу, отличающийся тем, что на входную грань призмы нанесено зеркальное покрытие, выполненное в виде симметрично расположенного круга, осветитель снабжен дополнительным источником света, светоделителем и апертурными диафрагмами, оптически сопряженными с входной гранью призмы посредством конденсора, причем первая диафрагма выполнена в виде круглого прозрачного отверстия, а вторая имеет вид прозрачного кольца, при этом диаметр изображения первой апертурной диафрагмы меньше диаметра круга зеркального покрытия, а внутренний диаметр изображения прозрачного кольца второй диафрагмы больше диаметра круга зеркального покрытия.
| ДАТЧИК УГЛА ПОВОРОТА | 2013 |
|
RU2569072C2 |
| US 5815269 A, 29.09.1998 | |||
| Дефектоскоп | 1948 |
|
SU81651A1 |
| US 7227627 B1, 05.06.2007. | |||

