терференционную картину. Когда сканирующие пучки лучей падают нормально на полупрозрачное зеркало 15 или зеркало 16, интерференционная картина характеризуется максимальной шириной полос, и с выхода фотоприемного блока 18 импульс поступает на вход вычислителя 19. Импульсы с выхода фотоприемного блока 18, соответствующие отражению пучков лучей от полупрозрачного зеркала 15, дают
разрешение на счет в вычислителе 19 импульсов с выхода кольцевого лазера 3, а импульсы, соответствующие
отражению пучков лучей от зеркала 16 на прекращение счета импульсов от кольцевого лазера 3. При этом число импульсов определяет угол поворота контролируемого объекта 17 относительно полупрозрачного зеркала 15« 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2007 |
|
RU2340871C1 |
| Оптическое сканирующее устройство | 1986 |
|
SU1403830A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СТАТИЧЕСКИЙ ФУРЬЕ-СПЕКТРОМЕТР | 2010 |
|
RU2436038C1 |
| УСТРОЙСТВО ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ЦЕНТРИРОВАННОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2011 |
|
RU2467286C1 |
| ЛАЗЕРНЫЙ МОНОКУЛЯРНЫЙ ДАЛЬНОМЕР | 2012 |
|
RU2515418C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
| Датчик положения кромки режущего инструмента | 1988 |
|
SU1606852A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ И ТЕКСТОВОЙ ИНФОРМАЦИИ | 2005 |
|
RU2305865C2 |
Изобретение относится к измерительной технике. Цель - контроль углового положения объекта по двум координатам за счет раздельного поочередного сканирования в горизонтальной плоскости двух пар пучков лучей и поворота плоскости сканирования на 90° одной из пар пучков лучей. Параллельный пучок лучей из коллиматора 4 делится блоком 5 призм на два пучка лучей в вертикальной плоскости, верхний и нижний. Эти пучки лучей попадают на светоделитель 8, который разделяет каждый из падающего пучков лучей на два в горизонтальной плоскости. После этого верхние пучки лучей падают на грани многогранной призмы 10, а нижние - на грани многогранной призмы 9. Нижние пучки лучей после отражения от граней вращаются многогранной призмой 9 попадают на призменную оборачивающую систему 11, которая поворачивает плоскость сканирования на 90°. Далее верхние и нижние пучки лучей отражаются от полупрозрачного зеркала 15, зеркала 16 и проходят в обратном порядке через все соответствующие элементы оптической системы датчика. При этом светоделитель 8 собирает два пучка лучей из одной пары (верхней и нижней) в один пучок, которые затем попадают в фотоприемный блок 18. Каждый из пучков образует на входной площадке фотоприемного блока 18 интерференционную картину. Когда сканирующие пучки лучей падают нормально на полупрозрачное зеркало 15 или зеркало 16, интерференционная картина характеризуется максимальной шириной полос, и с выхода фотоприемного блока 18 импульс поступает на вход вычислителя 19. Импульсы с выходафотоприемного блока 18, соответствующие отражению пучков лучей от полупрозрачного зеркала 15, дают разрешение на счет в вычислителе 19 импульсов с выхода кольцевого лазера 3, а импульсы, соответствующие отражению пучков лучей от зеркала 16, - на прекращение счета импульсов от кольцевого лазера 3. При этом число импульсов определяет угол поворота контролируемого объекта 17 относительно полупрозрачного зеркала 15. 4 ил.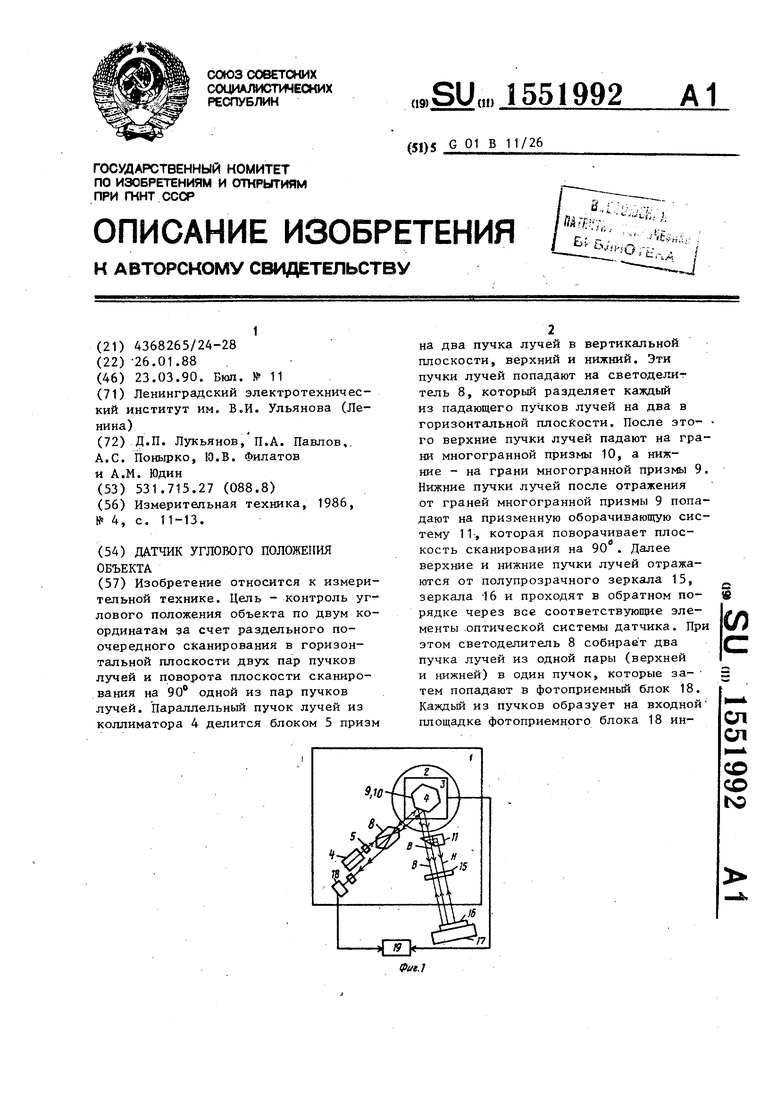
Изобретение относится к измерительной технике и может быть использовано для контроля углового положения объекта по двум координатам.
Целью изобретения является контроль углового положения объекта по двум координатам за счет раздельного поочередного сканирования в горизонтальной плоскости двух пар пучков лучей и поворота плоскости сканирования на 90 одной из пар пучков лучей.
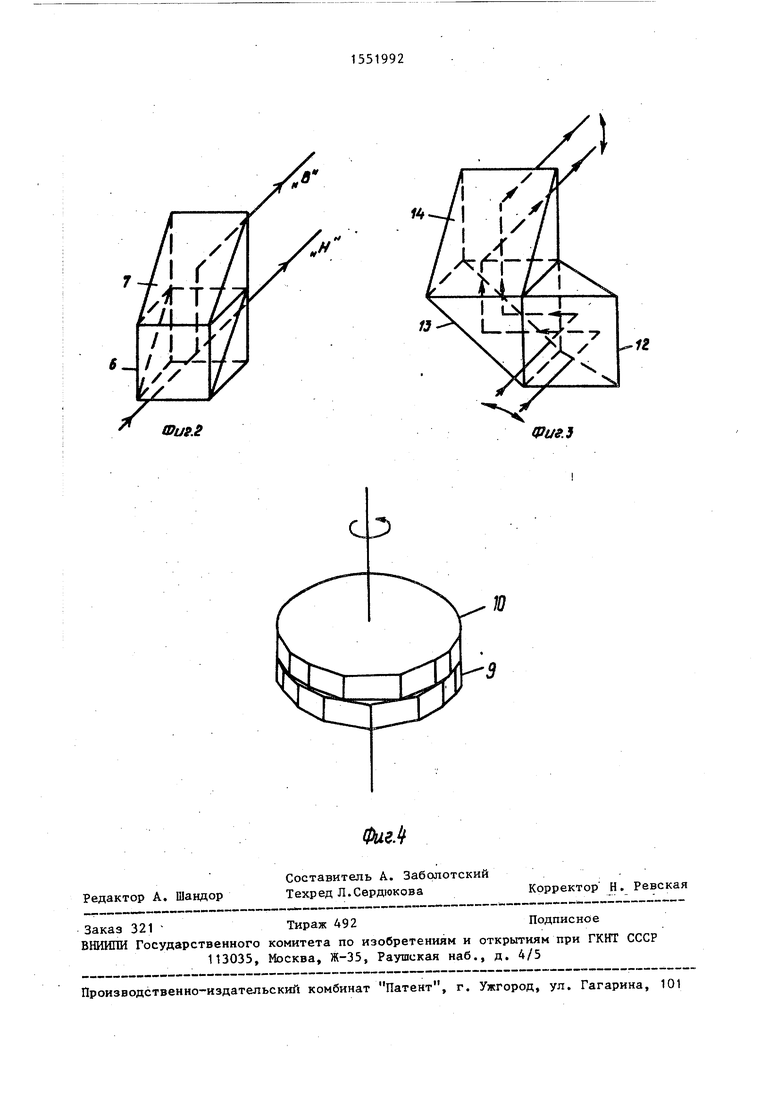
На фиг. 1 представлена функциональная схема датчика; на фиг. 2 - блок призм; на фиг. 3 - призменная оборачивающая система; на фиг. 4 - ,две многогранные призмы.
Датчик содержит основание 1, платформу 2, установленную на основании с возможностью поворота вокруг оси, перпендикулярной основанию, кольцевой лазер 3, установленный на платформе 2, коллиматор 4 и последовательно установленные по ходу пучка лучей коллиматора 4 блок. 5 призм, выполненный в виде светоделительной куб-призмы 6, установленной так, что ее входная грань оптически связана с коллиматором 4, и призмы АР-90 7, жестко скрепленной со светоделительной куб-призмой 6,так, что ее гипоте нузная грань параллельна светоделительной грани куб-призмы 6, светоделитель 8, в виде бипризмы Дове, две многогранные призмы 9 и 10 (фиг. 4), скрепленные с платформой 2 так, что нормали к .отражающим граням многогранных призм 9 и 10 образуют между собой заданный угол $, многогранная призма 9 оптически связана через светоделитель 8 со светоделительной куб-призмой 6 блока 5 призм, многогранная призма 10 оптически связана
5
0
5
о
Q
через светоделитель 8 призмой АР-900 7, призменную оборачивающую систему
11(фиг. 3), выполненную в виде трех призм АР-900 12-14, скрепленных между собой катетными гранями так, что нормали к входной грани призмы
12параллельны гипотенузной грани призмы 13 и нормали к выходной грани призмы 14, и установленную так, что входная грань призмы 12 оптически связана с гранями многогранной призмы 9, полупрозрачное зеркало 15, зеркало 16, предназначенное для скрепления с контролируемым объектом 17, фотоприемный блок 18, оптически связанный через светоделитель 8 с многогранными призмами 9 и 10, вычислитель 19, первый вход которого подключен к фотоприемному блоку 18, а второй - к кольцевому лазеру 3„
Датчик работает следующим образом.
Параллельный пучок лучей, вышедший из коллиматора 4, делится блоком 5 призм на два пучка лучей в вертикальной плоскости, верхний и нижний. Эти пучки лучей попадают на светодели- тель 8, который разделяет каждый из падающего пучков лучей на два в горизонтальной плоскости. После этого верхние пучки лучей падают на грани многогранной призмы 10, а нижние пучки лучей - на грани многогранной призмы 9. Вращение многогранных призм 9 ,и 10 приводит к сканированию отраженных от них пучков лучей в горизон- тальной плоскости. Нижние пучки лучей, отразившись от граней многогранной призмы 9, попадают на призменную оборачивающую систему 11, и после последовательных отражений от гипоте- нузных граней призм 12-14 начинают сканировать в вертикальной плоскости . Далее верхние и нижние пучки лучей отражаются от полупрозрачного зеркала 15, зеркала 16 и проходят в обратном порядке через полупрозрачное зеркало 15, при этом нижние пучки лучей пройдут через призменную оборачивающую систему 11. Далее обе пары пучков лучей отражаются от многогранных призм 9 и 10 и проходят через светоделитель 8, который собирает два пучка из одной пары (верхней и нижней) в один пучок. Затем два пучка лучей, верхний и нижний, попадают в фотоприемный блок 18.
Каждый из пучков образует на вход- 15 ностью поворота вокруг оси, перпен20
ной площадке фотоприемного блока 18 интерференционную картину.
В момент времени, когда сканируемые пучки падают нормально на полупрозрачное зеркало 15 или зеркало 16, интерференционная картина характеризуется максимальной шириной полос и с выхода фотоприемного блока 18 импульс поступает на вход вычислителя 19. Импульсы с выхода фотоприемного блока 18, соответствующие отражению пучков лучей от полупрозрачного зеркала 15, дают разрешение на счет импульсов с выхода кольцевого лазера 3. Импульсы с выхода фотоприемного блока 18, соответствующие отражению пучков лучей от зеркала 16, прекращают счет импульсов от кольцевого лазера 3. За счет углового смещения двух.многогранных призм на угол $ сканирование пучков по горизонтали и вертикали происходит поочередно, при этом очередность суммирования импульсов в вычислителе определяется выставкой многогранных призм 9 и 10 4д вокруг оси поворота платформы 2 перед измерением. Число импульсов, соответствующих пучкам лучей, отраженным от многогранных призм 9 и 10, определяет угол поворота объекта 17 относительно полупрозрачного зеркала 15,
Для обеспечения работоспособности датчика необходимо, чтобы угол $ между нормалями к отражающим граням многогранных призм 9 и 10, удовлетворял условию: -ob- (j , где (р - диапазон измеряемых углов; - центральный угол между гранями многогранных призм 9 и 10.
дикулярной основанию, кольцевой лазер, установленный на платформе, кол лиматор и последовательно установлен ные по ходу пучка лучей коллиматора светоделитель в виде бипризмы Дове, многогранную призму, скрепленную с платформой, полупрозрачное зеркало, зеркало, предназначенное для скрепления с контролируемым объектом, фо25 топриемный блок, вычислитель, первый вход которого подключен к фотоприемному блоку, а второй - к выходу кольцевого лазера, отличающийся тем, что, с целью из30 мерения углового положения объекта также по второй координате, он снабжен установленным между коллиматором и бипризмой Дове блоком призм, выполненным в виде светоделительной
g куб-призмы, установленной так, что ее входная грань оптически связана с коллиматором, и призмы АР-900, жестко скрепленной со светоделитель- ной куб-призмой так, что ее гипоте- нузная грань параллельна светодели- тельной грани куб-призмы, второй многогранной призмой, скрепленной с первой многогранной призмой так, что нормали к отражающим граням второй
45 многогранной призмы образуют с нор50
малями к соответствующим граням первой призмы заданный угол, призменной оборачивающей системой, выполненной в виде призм АР-900, скрепленных между собой катетными гранями так, что нормаль к входной катет- ной грани первой призмы параллельна гипотенузной грани второй призмы и нормали к выходной катетной грани ее третьей призмы, и установленной между многогранными призмами и свето- делительным зеркалом так, что ее входная грань оптически связана с второй многогранной призмой.
Таким образом, за счет разделения пучка лучей коллиматора 4 на два пучка лучей, раздельного сканирования с помощью двух многогранных призм 9 и
10 этих пучков лучей в горизонтальной плоскости и преобразования плоскости сканирования с помощью приз- менной оборачивающей системы 11 одного из пучков лучей датчик обеспечивает контроль углового положения объекта по двум координатам.
Формула изобретения
Датчик углового положения объекта, содержащий основание, платформу,- установленную на основании с возмож
дикулярной основанию, кольцевой лазер, установленный на платформе, коллиматор и последовательно установленные по ходу пучка лучей коллиматора светоделитель в виде бипризмы Дове, многогранную призму, скрепленную с платформой, полупрозрачное зеркало, зеркало, предназначенное для скрепления с контролируемым объектом, фотоприемный блок, вычислитель, первый вход которого подключен к фотоприемному блоку, а второй - к выходу кольцевого лазера, отличающийся тем, что, с целью измерения углового положения объекта также по второй координате, он снабжен установленным между коллиматором и бипризмой Дове блоком призм, выполненным в виде светоделительной
куб-призмы, установленной так, что ее входная грань оптически связана с коллиматором, и призмы АР-900, жестко скрепленной со светоделитель- ной куб-призмой так, что ее гипоте- нузная грань параллельна светодели- тельной грани куб-призмы, второй многогранной призмой, скрепленной с первой многогранной призмой так, что нормали к отражающим граням второй
многогранной призмы образуют с нор4д
0
малями к соответствующим граням первой призмы заданный угол, призменной оборачивающей системой, выполненной в виде призм АР-900, скрепленных между собой катетными гранями так, что нормаль к входной катет- ной грани первой призмы параллельна гипотенузной грани второй призмы и нормали к выходной катетной грани е третьей призмы, и установленной между многогранными призмами и свето- делительным зеркалом так, что ее входная грань оптически связана с второй многогранной призмой.
Фи.2
11
| Измерительная техника, 1986, № 4, с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
