Изобретение относится к области судостроения, в частности к способам и устройствам для проведения гидродинамических испытаний моделей судов в опытовых бассейнах, а также для моделирования в составе моделей судов работы двухступенчатых лопастных движителей за корпусом судна в ходе самоходных испытаний, и может быть использовано при проектировании судов и их движителей с целью обеспечения обоснованными исходными данными проектанта при выборе геометрических характеристик движителей и компоновке движительно-рулевых комплексов водных транспортных средств различного назначения.
Известны способы-аналоги испытания моделей судна в опытовом бассейне (см. патент №2132796 на изобретение «Способ маневренных испытаний модели судна в опытовом бассейне и устройство для его осуществления», кл. B63B 9/02, G01M 10/00, опубл. 10.07.1999 г.; см. патент №2383462 на изобретение «Способ испытаний модели морского инженерного сооружения в ледовом опытовом бассейне и устройство для его осуществления», кл. B63B 9/02, G01M 10/00, опубл. 20.10.2009 г.). Указанные способы основаны на использовании одного буксировочного динамометра модели судна или модели морского объекта и не предназначены для определения гидродинамических параметров движителей моделей судна.
Таким образом, недостатком указанных способов-аналогов является невозможность исследования гидродинамики двухступенчатых лопастных движителей.
Наиболее близким техническим решением к заявленному, принятым за ближайший аналог-прототип, является способ оценки пропульсивных характеристик судна на основе результатов модельного эксперимента, изложенный в книге "Пропульсивные качества морских судов", Ф.М. Кацман, А.Ф. Пустошный, В.М. Штумпф, Судостроение, 1972 г. (с. 207-238). Способ-прототип заключается в том, что в опытовом бассейне в соответствии с требованиями теории динамического подобия путем прямого движения модели судна с предусмотренной моделью двухступенчатого лопастного движителя в составе судового гребного винта и установленного за ним контрпропеллера в неподвижной водной жидкости, при котором модель судна жестко связана через динамометр с буксировочной тележкой опытового бассейна, посредством которого (динамометра) замеряют действующие на модель судна гидродинамические нагрузки: разность буксировочного сопротивления модели судна и тяги движителя, а упор и момент передней ступени движителя на режиме полного хода регистрируют одновальным винтовым динамометром. Влияние задней ступени движителя (контрпропеллера), которая при испытаниях работает в режиме энергосбережения и неподвижна, оценивается через коэффициенты взаимодействия движителя и корпуса и отдельно не динамометрируется.
Недостатком указанного прототипа является невозможность получения в ходе модельных испытаний в опытовом бассейне экспериментальных данных по гидродинамике второй ступени двухступенчатого лопастного движителя при его работе в реактивном режиме (т.е. в режиме судового гребного винта с подводом энергии для его вращения).
Таким образом, известный способ-прототип не моделирует работу второй ступени двухступенчатого лопастного движителя за корпусом судна и не может обеспечить проектанта обоснованными исходными данными, необходимыми для выбора геометрических характеристик движителя и компоновки движительно-рулевого комплекса в процессе проектирования судна. Проектирование лопастей второй ступени двухступенчатого движителя с учетом его двухрежимности (реактивный режим на скоростях малого хода и энергосберегающий режим на скорости полного хода судна, см. Л.И. Вишневский, А.Р. Тогуняц. "Корабельные лопастные движители: Новые технические решения, результаты исследований", СПб, Судостроение, 2011, с. 172-180) является сложной гидродинамической задачей, и возможность моделирования работы двухступенчатого лопастного движителя судна в опытовом бассейне существенно повысит точность расчетов и, следовательно, гидродинамическую эффективность движителя.
Изобретение направлено на устранение вышеуказанных недостатков прототипа, в первую очередь, на решение задачи моделирования работы двухступенчатого лопастного движителя судна в опытовом бассейне, включая режим малого хода (или аварийного хода) его второй ступени, т.е. реактивный режим работы его второй ступени (контрпропеллера).
Это достигается тем, что в предлагаемом способе моделирования работы двухступенчатого лопастного движителя в опытовом бассейне путем прямолинейного движения модели судна в составе с моделью двухступенчатого лопастного движителя в неподвижной воде чаши бассейна, при котором модель судна соединяют с буксировочной тележкой через предусмотренный между ними динамометр, с помощью которого замеряют гидродинамические нагрузки на модель судна, а упор и момент передней ступени модели движителя в составе модели гребного винта на режиме полного хода регистрируют установленным на валу передней ступени одновальным винтовым динамометром, в отличие от прототипа, дополнительно на режиме малого хода для измерения кинематических параметров и гидродинамических нагрузок, действующих на заднюю ступень двухступенчатого лопастного движителя, используют вышеупомянутый одновальный винтовой динамометр, а переднюю ступень движителя моделируют при этом гребным винтом, таким образом, что его неподвижно крепят к корпусу модели с возможностью свободного прохождения через его (гребного винта) ступицу вала вышеуказанного винтового динамометра к модели задней ступени движителя, которую жестко закрепляют на валу винтового динамометра с возможностью вращения вместе с валом последнего, при этом установочный шаг модели задней ступени двухступенчатого лопастного движителя фиксируют в положении, соответствующем вышеуказанному режиму малого хода.
Дополнительный режим моделирования работы двухступенчатого лопастного движителя в опытовом бассейне достигается тем, что на режиме малого хода лопасти модели гребного винта, неподвижно прикрепленного к корпусу модели судна, поворачивают во флюгерное положение, соответствующее их минимальному гидродинамическому сопротивлению при движении модели судна.
Сущность предлагаемого изобретения поясняется чертежом, на котором изображен вид сбоку модели судна с моделью двухступенчатого лопастного движителя, установленного в кормовой части за корпусом модели.
Модель судна 1 содержит переднюю ступень (судовой гребной винт) 2 движителя и заднюю ступень (контрпропеллер) 3, которые вместе с рулем 4 формируют движительно-рулевой комплекс модели судна (1), при этом внутри корпуса модели смонтирован одновальный винтовой динамометр 5, на его валу 6 закреплена ступица 7 задней ступени (3) модели двухступенчатого лопастного движителя.
Способ (технологию) моделирования работы двухступенчатого лопастного движителя судна в опытовом бассейне осуществляется следующим образом.
Модель судна 1 помещают в наполненную неподвижной водой чашу бассейна (на чертеже не показаны) и соединяют с установленной над ней буксировочной тележкой бассейна (на чертеже не показано) через предусмотренный между ними динамометр (на чертеже не показан), затем начинают осуществлять прямолинейное движение модели судна 1 вдоль канала бассейна синхронно с соединенной с моделью судна 1 буксировочной тележкой, при этом с помощью предусмотренного между ними динамометра замеряют гидродинамические нагрузки на модель судна 1, а упор и момент передней ступени (гребного винта) 2 модели движителя на режиме полного хода регистрируют установленным на валу передней ступени одновальным винтовым динамометром 5. Затем дополнительно к проведенным вышеописанным испытаниям осуществляют движение модели судна на режиме малого хода под действием задней ступени (контрпропеллера) 3, причем для измерения кинематических параметров и гидродинамических нагрузок, действующих на заднюю ступень 3 двухступенчатого лопастного движителя, используют вышеупомянутый одновальный винтовой динамометр 5, а переднюю ступень 2 движителя моделируют при этом гребным винтом таким образом, что его неподвижно крепят к корпусу модели судна 1 с возможностью свободного прохождения через его (гребного винта) ступицу (на чертеже не обозначена) вала 6 вышеуказанного винтового динамометра 5 к модели задней ступени 3 движителя, которую посредством ступицы 7 жестко закрепляют на валу 6 винтового динамометра 5 с возможностью вращения вместе с валом 6 последнего, при этом установочный шаг модели задней ступени 3 двухступенчатого лопастного движителя фиксируют в положении, соответствующем вышеуказанному режиму малого хода - реактивному режиму работы задней ступени 3.
Наиболее эффективным при осуществлении способа моделирования работы двухступенчатого лопастного движителя судна в опытовом бассейне является вариант, при котором на режиме малого хода лопасти (на чертеже не обозначены) передней ступени (гребного винта) 2, неподвижно прикрепленного к корпусу модели судна 1, поворачивают во флюгерное положение (на чертеже не показано), соответствующее их минимальному гидродинамическому сопротивлению при движении модели судна 1.
В общем случае способ моделирования работы двухступенчатого лопастного движителя судна в опытовом бассейне путем прямолинейного движения модели судна в составе с моделью двухступенчатого лопастного движителя в неподвижной воде чаши бассейна осуществляют в соответствии с требованиями теории динамического подобия, а именно: моделирование выполняется с обеспечением равенства чисел Фруда (Fr) модели и натуры (см. "Пропульсивные качества морских судов". Ф.М. Кацман, А.Ф. Пустошный, В.М. Штумпф, Судостроение, 1972 г., с. 198-199).
В результате вышеописанных испытаний модели судна в составе с моделью двухступенчатого лопастного движителя в опытовом бассейне получают экспериментальные исходные данные, в т.ч. величины упоров и моментов на валах как передней, так и задней ступеней модели двухступенчатого лопастного движителя, необходимые в дальнейшем при выборе (расчете) геометрических характеристик движителей и компоновке движительно-рулевых комплексов проектируемых водных транспортных средств.
Изобретение относится к области судостроения и касается способа моделирования работы двухступенчатого лопастного движителя за корпусом судна в ходе самоходных испытаний в опытовом бассейне. Способ предусматривает прямолинейное движение модели судна с моделью двухступенчатого лопастного движителя в неподвижной воде бассейна, при этом модель судна соединяют с буксировочной тележкой через динамометр, которым замеряют гидродинамические нагрузки на модель судна, а упор и момент передней ступени на режиме полного хода регистрируют установленным на валу передней ступени одновальным винтовым динамометром. Дополнительно на режиме малого хода для измерения гидродинамических нагрузок используют одновальный винтовой динамометр, причем переднюю ступень движителя моделируют неподвижным гребным винтом, через ступицу которого проходит вал винтового динамометра к модели задней ступени, при этом установочный шаг модели задней ступени фиксируют в положении, соответствующем режиму малого хода. Изобретение позволяет повысить точность расчетов и гидродинамическую эффективность проектируемого движителя. 1 з.п. ф-лы, 1 ил.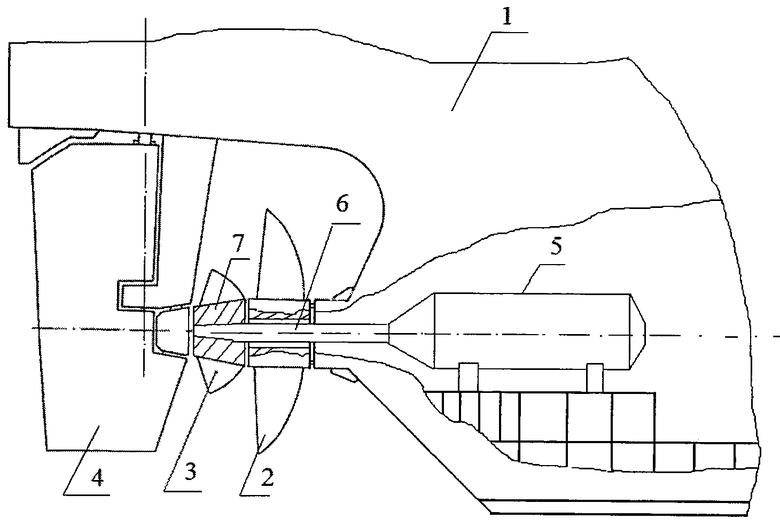
1. Способ моделирования работы двухступенчатого лопастного движителя в опытовом бассейне путем прямолинейного движения модели судна в составе с моделью двухступенчатого лопастного движителя в неподвижной воде чаши бассейна, при котором модель судна соединяют с буксировочной тележкой через предусмотренный между ними динамометр, с помощью которого замеряют гидродинамические нагрузки на модель судна, а упор и момент передней ступени модели движителя в составе модели гребного винта на режиме полного хода регистрируют установленным на валу передней ступени одновальным винтовым динамометром, отличающийся тем, что дополнительно на режиме малого хода для измерения кинематических параметров и гидродинамических нагрузок, действующих на заднюю ступень двухступенчатого лопастного движителя, используют вышеупомянутый одновальный винтовой динамометр, а переднюю ступень движителя моделируют при этом гребным винтом таким образом, что его неподвижно крепят к корпусу модели с возможностью свободного прохождения через его (гребного винта) ступицу вала вышеуказанного винтового динамометра к модели задней ступени движителя, которую жестко закрепляют на валу винтового динамометра с возможностью вращения вместе с валом последнего, при этом установочный шаг модели задней ступени двухступенчатого лопастного движителя фиксируют в положении, соответствующем вышеуказанному режиму малого хода.
2. Способ по п. 1, отличающийся тем, что на режиме малого хода лопасти модели гребного винта, неподвижно прикрепленного к корпусу модели судна, поворачивают во флюгерное положение, соответствующее их минимальному гидродинамическому сопротивлению при движении модели судна.
| JP 2004069390 A, 04.03.2004 | |||
| KR 101401498 B1, 03.06.2014 | |||
| Установка для испытаний судовых движителей | 1983 |
|
SU1093608A1 |
| Способ щелевой посадки рассады | 1959 |
|
SU126314A1 |

