Изобретение относится к судостроению, в частности, к способам обеспечения движения и маневрирования судна, а также к конструкциям судовых движительных комплексов и может быть использовано при проектировании и строительстве судов, преимущественно рыбопромыслового флота.
Известен принятый в качестве ближайшего аналога способ создания и изменения величины и направления упора с использованием движительного комплекса в виде гребного винта, расположенного за ним контрпропеллера меньшего диаметра с лопастями регулируемого шага, установленного с возможностью поворота вокруг вертикальной оси, и автономных приводов гребного винта и контрпропеллера, при котором на малом ходу судна обеспечивают работу контрпропеллера в реактивном режиме, а гребной винт стопорят и приводят в положение минимального сопротивления.
Изобретение предназначено для решения задачи повышения эффективности движения и маневрирования судна, а также создания соответствующей конструкции многофункционального лопастного движительного комплекса, позволяющих обеспечить с минимальными энергетическими затратами движение и маневрирование судна на малых ходах при сохранении (гидродинамическими средствами) энергоснабжения на режиме полного хода.
Это достигается тем, что в известном способе упор на контропропеллере обеспечивают как при работающем, так и неработающем гребном винте, при этом на полном ходу судна контрпропеллер используют в качестве дополнительного активного движителя, для чего приводят во вращение гребной винт и стопорят контрпропеллер, предварительно развернув лопасти последнего в положение, обеспечивающее максимальную раскрутку водяной струи за гребным винтом.
Дополнительно эффект достигается тем, что на всех режимах движения судна число оборотов контрпропеллера задают таким, при котором величина потребляемой им мощности не превышает 25% от общей мощности приводов судна и достигает максимума при движении судна малым ходом.
Соответственно в известном лопастном движительном комплексе технический результат достигается тем, что в известном устройстве контрпропеллер снабжен механизмом стопорения, а механизм изменения шага лопастей выполнен с возможностью изменения установочного шагового угла до 90o, при этом ступица контрпропеллера выполнена в виде обтекателя ступицы гребного винта.
Технический результат достигается также тем, что:
длина лопастей контпропеллера не превышает половины длины лопастей гребного винта, при этом контур лопастей контрпропеллера выполнен саблевидной формы, причем расстояние от выходящих кромок лопастей гребного винта до входящих кромок лопастей контрпропеллера не превосходит длины лопасти контрпропеллера;
между гребным винтом и контропропеллером имеется зазор криволинейной формы, образованный двумя сферическими поверхностями: выпуклой со стороны контрпропеллера и вогнутой со стороны гребного винта;
ось поворота контрпропеллера непосредственно примыкает к перу руля, установленного на судне, при этом угол поворота контрпропеллера в горизонтальной плоскости относительно этой оси на оба борта ограничен 90o;
контропропеллер выполнен с возможностью свободного вращения под действием водяной струи за гребным винтом.
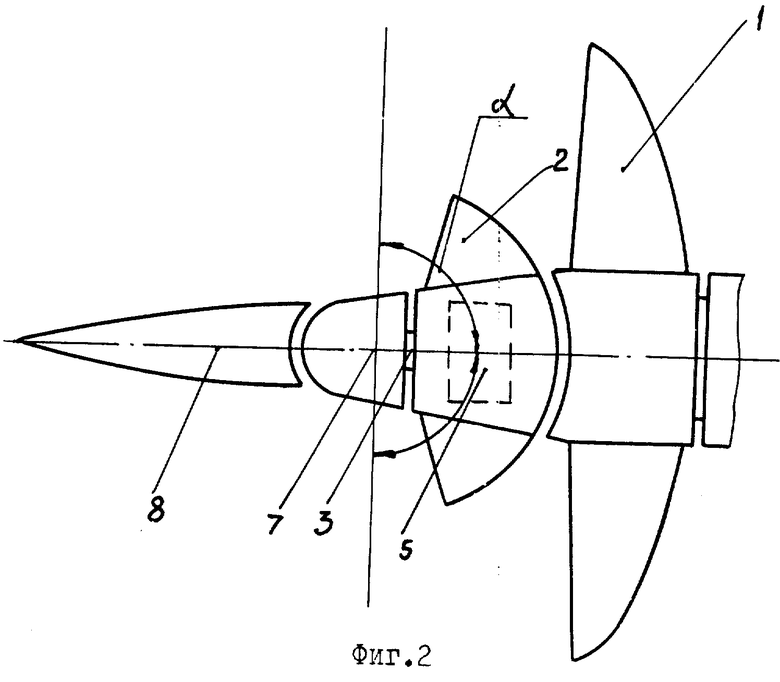
На фиг. 1 дан вид сбоку движительного комплекса судна; на фиг. 2 вид сверху.
Движительный комплекс содержит гребной винт 1, контрпропеллер 2 с валом 3, автономным приводом со стороны вала 4 и механизмом изменения шага лопастей 5, а также механизм поворота контрпропеллера 6 вокруг горизонтальной оси 7.
Способ обеспечения движения и маневрирования судна лопастным движительным комплексом осуществляется следующим образом.
Для обеспечения полного хода судна гребной винт 1 приводят во вращение, реализуя его лопастную систему как реактивный движитель. При этом контрпропеллер 2 используют как активный движитель, для чего вал контпропеллера 3 со ступицей контрпропеллера 2 стопорят, а его лопасти посредством механизма изменения шага 5 разворачивают в положение, обеспечивающее максимальную раскрутку реактивной струи за гребным винтом 1.
Для обеспечения малого хода гребной винт 1 отключают, а контрпропеллер 2 используют как реактивный движитель, для чего его лопасти посредством механизма изменения шага 5 поворачивают до установочного шагового угла малого хода, вал контрпропеллера 3 снимают со стопора, а ступицу контрпропеллера 2 приводят во вращение посредством автономного привода 4. При маневрировании судна контрпропеллер (кормовую лопастную систему) 2 поворачивают механизмом поворота контрпропеллер 6 вокруг вертикальной оси 7 на угол α и создают таким образом поперечную составляющую упора движителя.
Угол поворота a не превышает 90o.
Для повышения эффективности работы кормовой лопастной системы 3 на режимах маневрирования ее поворот вокруг вертикальной оси 7 синхронизируют с поворотом руля 8. Наибольший гидродинамический эффект достигается, если ось вращения контрпропеллера 3 лежит в плоскости пера руля 8, а ось поворота руля 8 и контрпропеллера 7 совпадают.
Конструкция движителя предусматривает на режиме полного хода работу кормовой лопастной системы 2 в турбинном режиме. В этом режиме при работающем гребном винте 1 вал контрпропеллера 2 разворачивают посредством механизма изменения шага 5 до установочного шагового угла, соответствующего турбинному режиму (режиму свободного вращения), и после выхода движителя на установившийся режим работы снимают полезную энергию с вращающегося вала контрпропеллера 2 на судовые нужды.
Преимущества предложенного изобретения заключаются в том, что устраняется необходимость дооснащения судна дорогостоящими и крупногабаритными устройствами, такими как двухскоростной понижающий редуктор, привод малого хода, выдвижная движительно-рулевая колонка и т.д. В этом случае улучшаются весогабаритные характеристики пропульсивной установки судна, увеличивается вместимость судна. Для малых судов, дооснащение которых упомянутыми устройствами не предусматривается, использование предлагаемого способа и лопастного движителя приведет к повышению надежности и безопасности мореплавания (кормовая лопастная система является резервным движителем), улучшит характеристики управляемости судна на малом ходу (благодаря возможности создания поперечной составляющей упора движителя), обеспечит неограниченный во времени малый и предельно малый ход и энергоснабжение на этих режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОПАСТНОЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 2007 |
|
RU2362706C2 |
| СПОСОБ ПРОЕКТИРОВАНИЯ ДВУХРЕЖИМНОГО КОНТРПРОПЕЛЛЕРА В ТРЁХ УСТАНОВОЧНОМ ВАРИАНТЕ И ДВУХРЕЖИМНЫЙ КОНТРПРОПЕЛЛЕР В ТРЁХ УСТАНОВОЧНОМ ВАРИАНТЕ | 2014 |
|
RU2569996C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ РАБОТЫ ДВУХСТУПЕНЧАТОГО ЛОПАСТНОГО ДВИЖИТЕЛЯ СУДНА В ОПЫТОВОМ БАССЕЙНЕ | 2014 |
|
RU2569230C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 1996 |
|
RU2115588C1 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ СУДНА | 1992 |
|
RU2077445C1 |
| Движительный комплекс подводного объекта | 2023 |
|
RU2827383C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 1996 |
|
RU2115589C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 1997 |
|
RU2119875C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 2003 |
|
RU2248302C1 |
| ВИНТОВОЙ ДВИЖИТЕЛЬ | 2000 |
|
RU2167784C1 |
Использование: судостроение, способы и устройства обеспечения движения и маневрирования судна. Сущность: в способе, включающем изменение величины и направления упора лопастного движительного комплекса, с использованием гребного винта и расположенного за ним контрпропеллера, упор на контрпропеллере обеспечивают как при работающем, так и неработающем гребном винте, для чего на полном ходу приводят во вращение гребной винт и стопорят контрпропеллер, на малом ходу стопорят гребной винт и приводят во вращение контрпропеллер, а изменение направления упора осуществляют поворотом контрпропеллера в сторону, противоположную стороне поворота судна. Для реализации способа контрпропеллер выполнен с возможностью вращения и снабжен автономным приводом со стопором, а также механизмом изменения шага лопастей, при этом контрпропеллер выполнен с возможностью поворота в горизонтальной плоскости относительно оси, перпендикулярной линии оси гребного вала. Изобретение позволяет уменьшить энергозатраты на движение судна, улучшить весогабаритные характеристики пропульсивной установки, а также обеспечить управляемость на малом ходу. 2 с. и 5 з.п. ф-лы, 2 ил.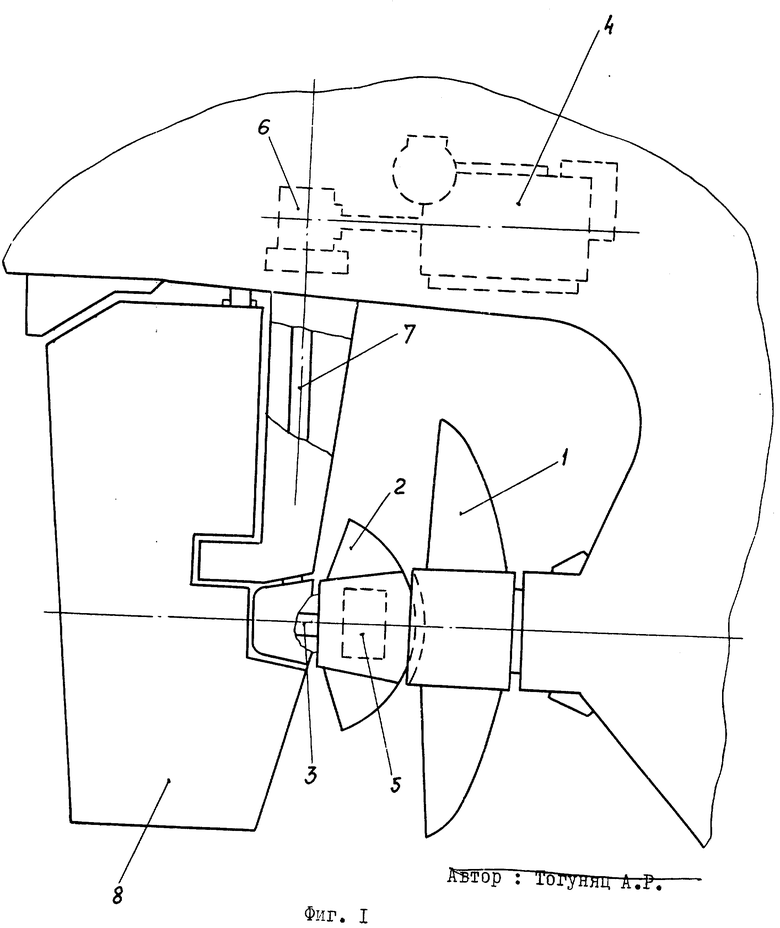
| SЕ, заявка,№ 448981, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
