Область техники, к которой относится изобретение
Настоящее изобретение относится к электронной системе управления и высокотехнологичному процессу оптимизации потребления электроэнергии микронасосным устройством (например пьезоэлектрическим микронасосом) и проверки надежности функционирования насосного механизма, как правило, путем анализа сигналов двух встроенных детекторов в зависимости от напряжения привода.
Уровень техники
Срок службы аккумуляторных батарей является одним из наиболее важных ограничений для портативных медицинских приборов, таких как инсулиновые помпы и другие аналогичные устройства. Он определяется соотношением между емкостью аккумуляторной батареи и потреблением электроэнергии. Если речь идет об определенной батарее, срок ее службы можно увеличить только за счет ограничения потребления электроэнергии устройством, которое питается от указанной батареи.
В большинстве мембранных насосов, насосная мембрана испытывает избыточное воздействие со стороны точных механических упоров в целях обеспечения очень высокой воспроизводимости и точности накачки путем управления объемом хода (см., например, патентный документ EP 0737273).
В конкретном случае пьезоэлектрического привода (актуатора) устанавливают максимальное напряжение с целью компенсировать смещения привода относительно заданного положения, а также обеспечить независимость закачиваемого объема от условий окружающей среды. Несмотря на все отклонения и неопределенности, связанные с допусками, приводимая в действие мембрана всегда должна достигать одинаковой амплитуды. Однако очевидно, что чем выше запас надежности, тем больше подаваемое напряжение и соответственно больше потребление электроэнергии.
В публикации WO 03/023226 A1 (заявитель - компания Medtronic Minimed Inc.) представлены электронные системы управления и метод, применяемые для инфузионных устройств и конфигураций насоса, которые позволяют обеспечить высокоэффективное использование электрической энергии.
При этом известном уровне техники система может включать конденсатор, которым управляют, чтобы обеспечить его частичный, но неполный разряд для подачи импульса большой мощности на катушку насоса. Для управления разрядом конденсатора может предусматриваться силовой выключатель, позволяющий останавливать разряд конденсатора до фактического окончания хода якоря. Момент времени, когда прекращается разряд конденсатора, можно выбрать так, чтобы энергия, остающаяся в катушке после прекращения разряда конденсатора, была достаточной для продолжения хода насоса до его фактического окончания. Между конденсатором и аккумуляторной батареей может предусматриваться выключатель питания, позволяющий осуществлять электрическое отключение конденсатора от батареи при хранении или во время других периодов неиспользования.
В документе US 2009/0140185 раскрыта система и способ улучшения и оптимизации точности поддержания скорости потока гидравлической системы доставки, например имплантируемой инфузионной системы доставки лекарств, при помощи которых достигается требуемая скорость потока путем изменения рабочего цикла клапана. Описанный клапанный блок содержит поршень, который приводится в действие пьезоэлектрическим приводом, при этом движение поршня позволяет жидкости (например лекарству в жидкой форме), подаваемой к впускному каналу, проходить мимо поршня по канавке, поступая в накопительную полость на другом конце поршня, откуда жидкость проталкивается затем в выпускной канал и, в конце концов, направляется к представляющему интерес участку, такому как требуемая зона для введения лекарства в организме пациента. Управление опусканием поршня осуществляется при помощи специального электрического сигнала, приложенного к пьезоэлектрическому приводу, который в результате этого деформируется с небольшим смещением вниз.
Требуемая постоянная скорость потока доставляемой жидкости может быть определена путем изменения рабочего цикла, т.е. отношения времени пребывания клапана в открытом состоянии к времени его пребывания в закрытом состоянии.
Другие публикации известного уровня техники, относящиеся к аналогичным насосам, например, US 5,759,015, WO 01/90577, EP 1839695, EP 2059283 и WO 2010/046728 полностью включены посредством ссылки в настоящую заявку в части конструирования таких насосов.
Раскрытие изобретения
В заявке на Европейский патент № 09178168.2, поданной 7 декабря 2009 г. тем же заявителем, что и настоящая заявка, раскрыт гибкий элемент для микронасоса, который может приводиться в действие пьезоэлектрическим элементом. Эта более ранняя заявка полностью включается в настоящую заявку в части описания микронасосов, приводимых в действие пьезоэлектрическим элементом.
Рассматривая возвратно-поступательный мембранный насос с пьезоэлектрическим приводом, включающий датчик, например, такой как тот, что раскрыт в EP 09178168.2, настоящее изобретение предлагает усовершенствованный способ и систему управления, позволяющие максимально уменьшить напряжение возбуждения привода на основе измерений, выполняемых по меньшей мере одним встроенным датчиком, чтобы заставить насосную мембрану медицинского прибора достичь заданного положения, со следующими целями:
- уменьшение потребления электроэнергии насосным устройством путем подачи минимального напряжения при поддержании точного откачиваемого объема;
- определение надежности привода и управление механической устойчивостью насосной системы в течение срока службы прибора путем анализа изменения этого возбуждающего напряжения в течение срока службы.
Предпочтительно, заданное положение соответствует одному или нескольким механическим упорам, которые ограничивают ход насосной мембраны.
Предпочтительно, привод представляет собой пьезоэлектрический привод.
Предпочтительно, оптимальное напряжение достигается в процессе обучения.
Предпочтительно, процесс обучения, необходимый для определения этого оптимального возбуждающего напряжения, выполняется в течение первого хода насоса, но может также выполняться:
- в течение нескольких начальных ходов насоса;
- периодически с заданной частотой;
- постоянно.
Предпочтительно, один из используемых датчиков представляет собой:
- датчик давления, помещенный на пути прохождения жидкости, более конкретно, в насосной камере, находящейся между впускной и выпускной камерой, которая предпочтительно содержит клапаны или постоянные ограничители потока, либо комбинацию обоих устройств;
- датчик приближения для распознавания положения мембраны, который может быть емкостным, резистивным, магнитным, индуктивным или оптическим;
- тензометрический датчик, помещенный на механический упор, или на мембрану, или на привод.
Конечно, упомянутые выше предпочтительные варианты представляют собой лишь возможные примеры реализации и не должны рассматриваться как ограничивающие объем изобретения.
Краткое описание графических материалов
Настоящее изобретение и варианты его осуществления будут понятнее из следующего подробного описания и чертежей, иллюстративных вариантов осуществления изобретения.
На ФИГ.1a изображена схематическая конструкция насосного устройства в соответствии с настоящим изобретением.
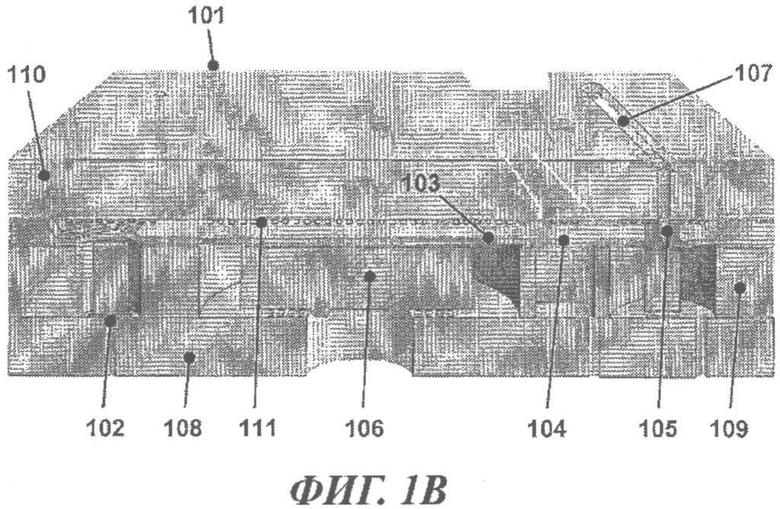
На ФИГ.1b изображен схематический вид предпочтительного варианта осуществления насосного устройства в соответствии с настоящим изобретением.
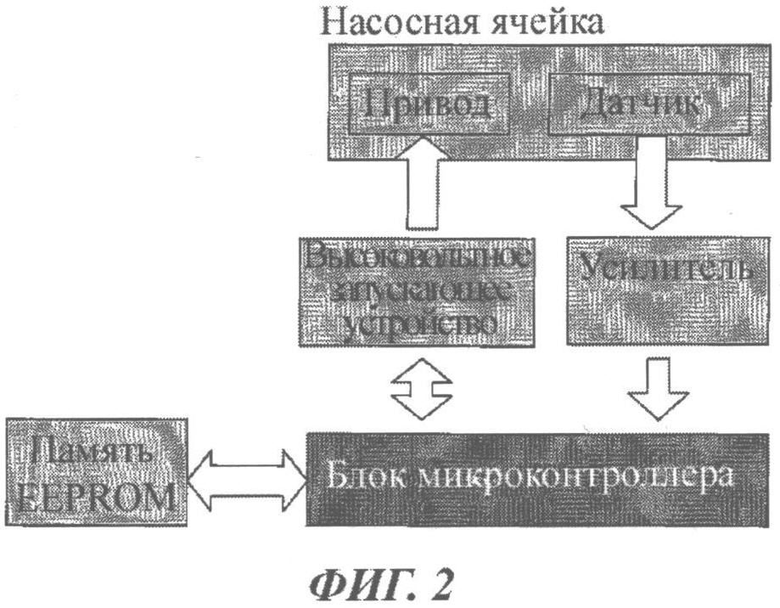
На ФИГ.2 изображена схематическая конструкция системы управления насосным устройством.
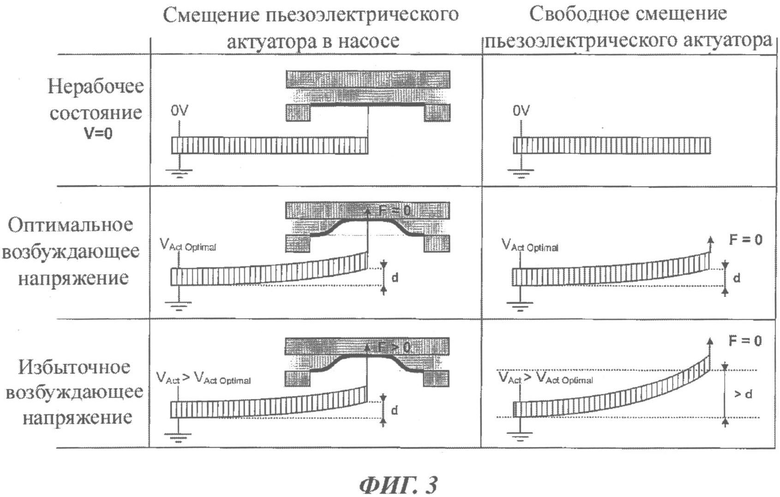
На ФИГ.3 изображено геометрическое представление оптимального состояния насоса, а также нерабочее состояние и состояние избыточного воздействия.
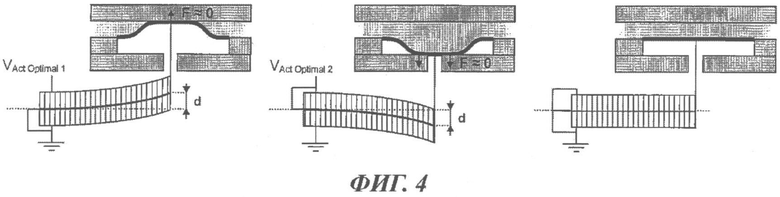
На ФИГ.4 изображены примеры приведения в действие насосного устройства с помощью двух механических упоров и двух оптимальных напряжений.
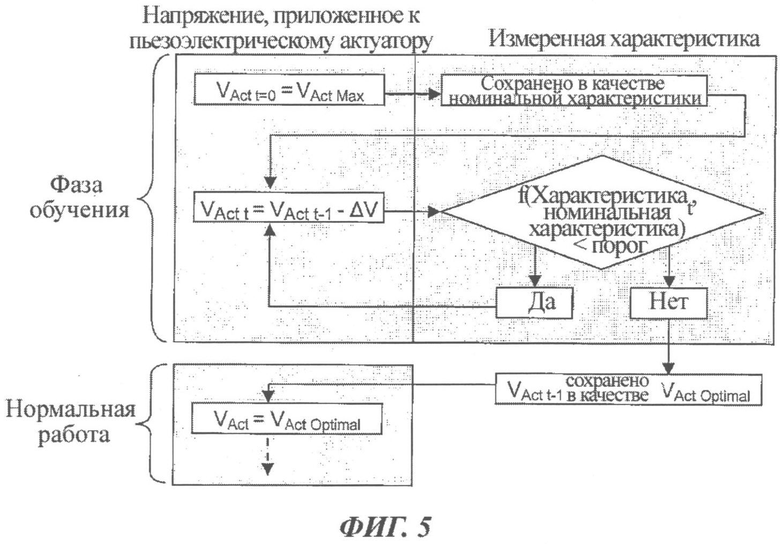
На ФИГ.5 представлено схематическое описание первого алгоритма в соответствии с настоящим изобретением.
На ФИГ.6 представлена последовательность линейно изменяющихся напряжений с приближением к VΑct Οptimal в соответствии с первым алгоритмом.
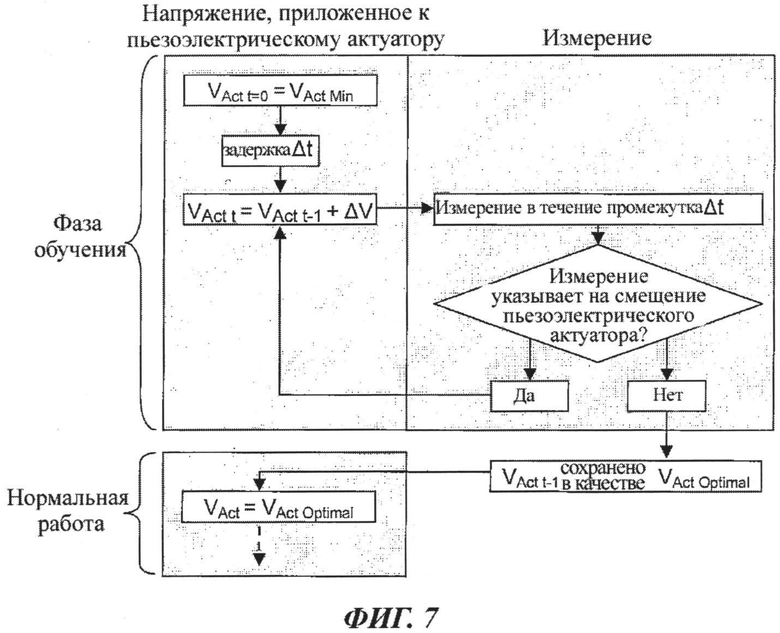
На ФИГ.7 представлено схематическое описание второго алгоритма в соответствии с настоящим изобретением.
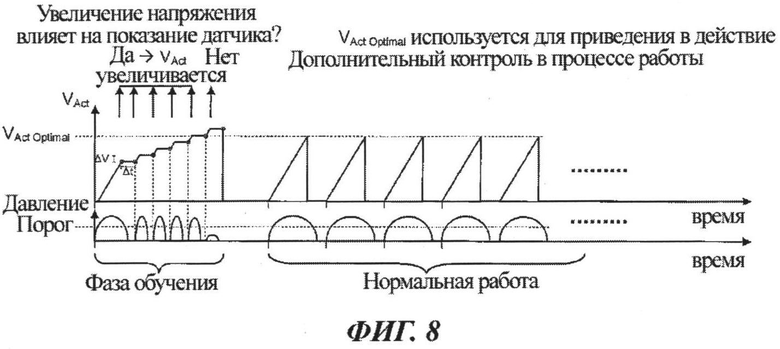
На ФИГ.8 представлена последовательность линейно изменяющихся напряжений с приближением к VΑct Οptimal в соответствии со вторым алгоритмом.
На ФИГ.9 представлена последовательность линейно изменяющихся напряжений с приближением к VΑct Οptimal в соответствии с вариантом второго алгоритма.
На ФИГ.10 изображен другой способ приближения к оптимальному возбуждающему напряжению.
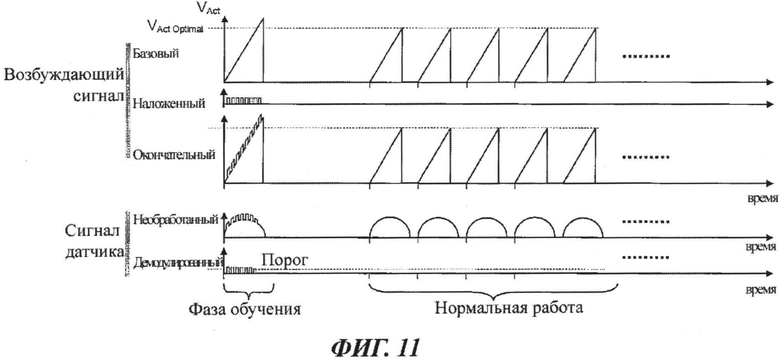
На ФИГ.11 изображена суперпозиция линейно изменяющихся напряжений возбуждающего сигнала с приближением к VΑct Οptimal.
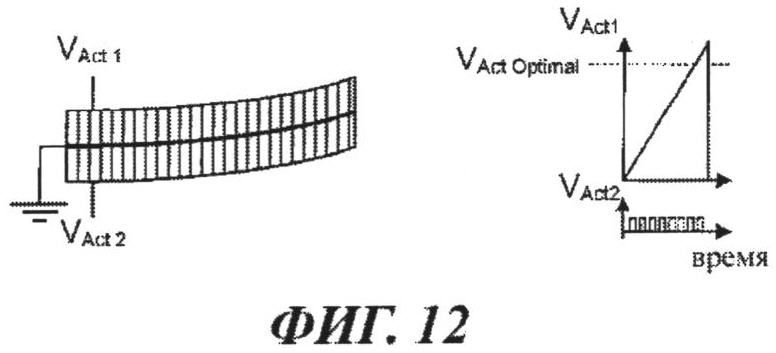
На ФИГ.12 изображена подача напряжения сигнала к другому электроду для мультиморфного пьезоэлектрического элемента, работающего на изгиб.
Осуществление изобретения.
Описание насосного устройства.
Для того, чтобы четко определить сущность новизны, опишем другой элемент, включающий насосную систему (как правило, например, раскрытую в патенте EP 09178168.2, полностью включенном в настоящую заявку), со ссылкой на ФИГ.1a.
1. Насосная мембрана (1), которая должна достичь одного или нескольких четко определенных положений, возможно, механически заданных механическими упорами (2) (или механическим ограничителем).
2. Путь прохождения жидкости, образованный:
- впускной камерой (3), содержащей, например, клапан или ограничитель потока,
- насосной камерой (4),
- первым датчиком,
- выпускной камерой (5), содержащей, например, клапан или ограничитель потока,
- вторым датчиком и
- гидравлическим сужением.
3. Подложка, используемая в качестве опоры.
4. Привод, например пьезоэлектрический привод (6), который приводит в действие насосную мембрану (1), но необязательно плотно присоединен к ней. Этот пьезоэлектрический привод управляется определенным напряжением, например линейным изменением напряжения от 0 до VAct Max. В нижеследующем описании используется элемент изгибного типа (консольный элемент), однако аналогичным образом могут использоваться и другие формы, тип или конфигурация пьезоэлектрического привода (пластина, кольцо, пакеты пластин, пакеты колец, пластинчатые элементы, работающие на изгиб, кольцевые элементы, работающие на изгиб, пластинчатые шпонки, мономорфные, мультиморфные и т.д.), а также другие типы высокотехнологичных приводов (актуаторов), такие как пакеты сплавов с памятью формы (SMA, shape memory alloy) и полимеры (SMP), электрострикционные или магнитострикционные приводы.
Такие возвратно-поступательные мембранные насосные механизмы с высокой степенью миниатюризации предпочтительно выполняются из кремния с использованием методов MEMS в соответствии с известным уровнем техники, ссылки на который приведены выше. В таком предпочтительном варианте осуществления микронасос (101), показанный на ФИГ.1b, изготовлен из кремния, или стекла, или обоих материалов, с помощью технологии, называемой «микроэлектромеханические системы» (MEMS, Micro-Electro-Mechanical System). Он содержит впускной регулирующий элемент, здесь - впускной клапан (102), насосную мембрану (103), функциональный датчик (104), который обеспечивает возможность обнаружения различных отказов в системе, и выпускной клапан (105). Принцип работы таких микронасосов известен из предыдущего уровня техники, например из патента US 5,759,014.
На ФИГ.1b изображен насос (101) с пакетом, состоящим из первого слоя кремния в качестве базовой пластины (108), второго слоя кремния в качестве второй пластины (109), прикрепленной к базовой пластине (108), и третьего слоя кремния (110) в качестве верхней пластины, прикрепленной к кремниевой пластине (109), тем самым образуя насосную камеру (111), имеющую некоторый объем.
Привод (не представленный здесь), присоединенный к мезаструктуре (106), обеспечивает возможность регулируемого смещения насосной мембраны (103). Смещение насосной мембраны (103) ограничено в верхнем направлении пластиной (110), которая соответствует механическому упору (2) на ФИГ.1a, а в нижнем направлении - пластиной (108), которая соответствует второму механическому упору, не представленному на ФИГ.1a. Имеется также канал (107), соединяющий выпускной регулирующий элемент, выпускной клапан (105), с выпускным отверстием, расположенным на противоположной стороне насоса. Второй функциональный датчик (не представленный здесь) помещен на пути прохождения жидкости за выпускным регулирующим элементом.
Впуск (3, 102) насосного механизма присоединен к резервуару для жидкости, который должен содержать фильтр, при этом выпуск (5, 105) присоединен к пациенту при помощи пути прохождения жидкости, который должен содержать клапаны или ограничители потока, датчик давления, пневмодатчик, расходомер, фильтр, вентиляционное отверстие, перегородку, трансдермальный пластырь, иглы и другие вспомогательные приспособления.
Датчик (104) измеряет определенные характеристики хода насоса. Этими характеристиками могут быть давление в одной или нескольких точках системы, как предусмотрено в известной конструкции насоса (см. публикацию WO 2010/046728), однако могут использоваться, например, и следующие датчики:
1. Датчик давления, расположенный на пути прохождения жидкости.
2. Датчик приближения для распознавания положения мембраны, который может быть емкостным, резистивным, магнитным, индуктивным или оптическим.
3. Тензометрический датчик, расположенный;
- на механическом упоре (2);
- на насосной мембране (1);
- на пьезоэлектрическом приводе (6).
В одном из вариантов осуществления датчик (104) предпочтительно представляет собой датчик давления, расположенный внутри полости насосной камеры (111) и между впускной камерой (102) и выпускной камерой (105). Эти впуск (102) и выпуск (105) могут представлять собой клапаны, предпочтительно пассивные, или ограничители потока. В случае микронасосов MEMS датчик давления (104) может быть выполнен из гибкой кремниевой мембраны, содержащей набор тензочувствительных резисторов, включенных по схеме измерительного моста Уитстона, в которой используется очень значительный пьезорезистивный эффект кремния. Изменение давления вызывает деформацию мембраны, при этом мост уже не находится в равновесии. Датчик (104) рассчитан таким образом, чтобы сигнал был линейным, когда давление находится в диапазоне давлений, типичном для микронасоса (101). На задней стороне датчика может быть предусмотрено отверстие для измерения перепада давления, либо она может быть герметизирована в вакууме для измерений абсолютного давления. Мембрана датчика (104) предпочтительно имеет круглую или квадратную форму. В зависимости от конструкции микронасоса тензометрические датчики и соединительные выводы могут импланироваться на поверхности датчика, которая должна находиться в контакте с перекачиваемой жидкостью. Для обеспечения хорошей электрической изоляции датчика (104) необходимо использовать защитный изолирующий слой. Альтернативно, для предотвращения утечки тока может использоваться дополнительное легирование поверхности датчика с полярностью, противоположной полярности выводов и пьезорезисторов.
Очень низкая сжимаемость кремниевого микронасоса (101) в сочетании с небольшим объемом насосной полости (111) (несколько сотен нанолитров) и высоким коэффициентом сжатия (до 2 или больше) делает датчик давления, помещенный внутрь насосной полости (111), очень чувствительным к малому изменению давления до 1 мбар. Этот датчик (104) пригоден для обнаружения очень малого изменения положения насосной мембраны (103) (доли микрон) во время фаз приведения в действие, как описано ниже. Более подробные сведения о возможностях встроенного датчика давления (104) приведены в документе WO 2010046728.
На более высоком уровне система управления насосным устройством состоит из следующих элементов, представленных на ФИГ.2:
1. Высоковольтное запускающее устройство для возбуждения пьезоэлектрического привода.
2. Усилитель для обработки сигнала, поступающего отдатчика(-ов).
3. Микроконтроллер, который управляет высоковольтным запускающим устройством и принимает сигнал(ы) датчика(-ов).
4. Память, например энергонезависимая ЭСППЗУ (EEPROM), внутренняя флэш-память микроконтроллера или память с произвольным доступом (RAM, random access memory), в которой микроконтроллер может хранить данные и установочные параметры (приложенное напряжение, данные датчика, заданные значения и т.д.).
Определение оптимального напряжения VAct Optimal.
Идея настоящего изобретения заключается в определении минимального возбуждающего напряжения, которое нужно приложить к пьезоэлектрическому приводу, чтобы обеспечить достижение насосной мембраной (1) механического(-их) упора(-ов) (2). После контакта механический(-е) упоры(ы) (2) получают толчок с силой, в идеальном случае равной нулю, или с минимальной силой, достаточной только для того, чтобы выдерживать давление, оказываемое на мембрану (1). Далее по тексту это минимальное напряжение называется оптимальным напряжением и обозначается VAct Optimal.
Такое поведение иллюстрируется на ФИГ.3, на котором показаны различные состояния устройства: в левом столбце устройства в соответствии с настоящим изобретением и в правом столбце, где в целях объяснения и иллюстрации представлено свободное смещение одного только пьезоэлектрического привода (6).
Более конкретно, два рисунка в первой строке (левый и правый столбец) изображают нерабочее состояние, в котором приложенное напряжение равно нулю (V=0). Пьезоэлектрический привод (6) не двигается и мембрана (1) не смещается. Поэтому путь прохождения жидкости оказывается «открытым».
Во второй строке изображено поведение в случае, когда используется оптимальное возбуждающее напряжение, т.е. когда смещение «а» пьезоэлектрического привода в точности соответствует расстоянию, необходимому, чтобы мембрана (1) достигла нужного механического упора (2), т.е. расстоянию «d». Это поведение, попытка обеспечить которое сделана в настоящем изобретении. Как показано в правом столбце, свободное смещение привода также соответствует расстоянию «d».
В третьей строке изображено поведение (и напряжение), связанное с избыточным воздействием. В данной конфигурации используемое напряжение выше, чем оптимальное значение, поэтому смещение привода (6) превышает расстояние «d» (как показано на чертеже в правом столбце). В этом случае происходит потеря энергии, поскольку в системе имеется механический упор, который препятствует движению привода, при этом мембрана (1) достигла бы этого механического упора, используя более низкое напряжение, например оптимальное возбуждающее напряжение.
Поэтому цель состоит в том, чтобы обеспечить возможность определения оптимального возбуждающего напряжения, которое необходимо для правильного функционирования прибора, как показано во второй строке на ФИГ.3, и избежать поведения, изображенного в третьей строке (избыточное воздействие).
Цели использования VAct Optimal.
Настоящее изобретение имеет три основные цели, которые подробно описаны ниже:
1. Уменьшение потребления электроэнергии.
2. Определение надежности приведения в действие с помощью пьезоэлектрического привода.
3. Вычисление смещения насосной мембраны.
Настоящее изобретение обеспечивает возможность уменьшения потребления электроэнергии в системе, где используются пьезоэлектрические приводы, путем приложения наименьшего необходимого напряжения. Энергию, необходимую для приведения в действие пьезоэлектрического привода, можно вычислить с помощью эквивалентной модели конденсатора:
 ,
,
где C представляет собой емкость пьезоэлектрического привода, а V - приложенное напряжение. Эта формула показывает, что уменьшение напряжения на 50% снижает энергию в 4 раза, а уменьшение напряжения на 29,3% приводит к снижению энергии в 2 раза.
Настоящее изобретение также позволяет эффективно определять надежность привода в процессе работы насоса.
Например, узел пьезоэлектрического привода (6) включает механический контур, состоящий из: подложки, насоса, привода и гибкого соединения между насосной мембраной (1) и этим приводом (6) (см. заявку EP 09178168.2). Эти различные элементы, как правило, склеиваются. В процессе нормальной работы насоса эти клеи подвергаются воздействию высоких механических напряжений, которые могут привести к отказу данного механического контура и, вследствие этого, самого насоса. Типичным повреждением является расслаивание пьезоэлектрического привода (6). Возникающее расслаивание происходит постепенно, при этом его бывает очень заметить до того, как произойдет полный отказ: перевозбуждение пьезоэлектрического привода (6) компенсирует, по крайней мере вначале, расслаивание привода (6). Для портативной системы вливания лекарств желательно использовать способ, позволяющий идентифицировать начало отказа.
В одном из описанных ниже вариантов осуществления фаза обучения включает, в первую очередь, запись номинальных показаний датчиков давления при максимальном напряжении. После этого снижают напряжение, и осуществляют контроль сигналов до значительного изменения сигналов детектора, указывающего на то, что механические упоры (2) не достигнуты.
Предположим сначала, что механический контур находится в рабочем состоянии до первого запуска насоса. Фаза обучения может быть пройдена в процессе заливки насоса перед пуском. Важно отметить, что второй датчик давления, находящийся за выпускным отверстием камеры, можно использовать в качестве расходомера, поскольку интеграл его сигнала пропорционален, для данной температуры, скорости потока. Поэтому мы предполагаем, что номинальный сигнал второго детектора при максимальном напряжении VΜax характерен для номинального объема хода насоса, т.е. ситуации, когда насосная мембрана во время приведения в действие достигает двух механических упоров.
Уменьшая шаг за шагом возбуждающее напряжение и контролируя сигнал датчика давления (104), можно определить минимальное (и, тем самым, оптимальное) напряжение VAct Optimal, необходимое для достижения номинального объема хода.
Очевидно, что это VAct Optimal зависит от надежности механического контура, при этом любое расслаивание увеличивает значение VAct Optimal. Этот способ является очень чувствительным и надежным, поскольку позволяет избежать перевозбуждения пьезоэлектрического привода (6), а также обеспечивает прямой доступ к определению объема хода, который представляет собой более подходящее значение с точки зрения безопасности и надежности.
На практике испытание на функциональную надежность состоит из проверки амплитуды сигналов давления путем использования возбуждающего напряжения, несколько большего, чем VAct Optimal.
Первый датчик давления (104), находящийся внутри насосной камеры (4, 111), также следует использовать для реализации этого процесса.
Важно также отметить, что исходное положение мембраны (на электроды пьезоэлектрического привода не подано напряжение) может соответствовать любому месту между верхним и нижним механическими упорами. В самом общем случае амплитуды ходов от исходного положения до механических упоров несимметричны. Эта несимметричность может быть вызвана самой конструкцией, механической обработкой, допусками на сборку, а также смещениями. Если конструкция не предполагает несимметричных ходов, целесообразно оценить минимальное напряжение, необходимое для достижения механического упора (2) в обоих направлениях, чтобы уменьшить потребление электроэнергии. Привод (6) предпочтительно может представлять собой биморфный или мультиморфный пьезоэлектрический привод, который обеспечивает большие двусторонние отклонения и большие значения силы. В этой конфигурации сборка может вызывать несимметричность, как правило, вследствие использования клеев для образования механического контура. Поэтому может оказаться полезным определить смещение мембраны (1) в исходном положении в целях оптимизации потребления электроэнергии приводом. Максимальные напряжения для двух ходов VAct Μax (вверх) и VAct Μax (вниз) вначале равны VAct Μax по абсолютной величине. На практике испытание состоит из проверки амплитуды сигналов давления путем уменьшения сначала только VAct (вверх) в целях определения VAct Optimal (вверх), после чего VAct (вверх) снова устанавливается равным VAct Μax, и теперь изменяют VAct (вниз) в целях определения VAct Optimal (вниз).
Важно отметить, что нерабочее положение мембраны (1) и минимальное усилие, необходимое для достижения механических упоров (2), зависит не только от механической сборки или допусков на механическую обработку, но и от условий окружающей среды. Обычное перевозбуждение насосных приводов, как правило, предотвращает недостаточное вливание вследствие этих эффектов, однако оно неэффективно с точки зрения потребления электроэнергии. Типичный диапазон изменений давления зависит от предусмотренного применения. Если рассматривать медицинские применения, например инсулиновые помпы, имеющие инфузионные линии, высота напора жидкости в инфузионной линии оказывает значительное влияние на давление на выпуске насосной камеры. Насосный механизм должен преодолеть это дополнительное давление, чтобы обеспечить нужный объем вливания (инфузии). В таких устройствах, имеющих длинные инфузионные линии, напряжение перевозбуждения может в два раза превышать минимальное напряжение, необходимое, чтобы достичь механического упора (2) в нормальных условиях.
Использование предпочтительного варианта настоящего способа (встроенный кремниевый датчик (104), находящийся в насосной камере (111) и между впускным отверстием камеры (102) и выпускным отверстием камеры (105), предпочтительно два клапана и, более конкретно, два обратных клапана, как показано на ФИГ.1b) очень эффективно ограничивает потребление электроэнергии приводом (6), поскольку позволяет предусмотреть эффект изменения высоты напора или внешнего давления путем измерения самого давления до, во время или после цикла работы насоса. Для этого можно также использовать дополнительный датчик давления, расположенный за выпускным отверстием камеры (105).
В целях осуществления непостоянного контроля завершения полного хода необходимо ввести запас надежности для оптимального напряжения, чтобы предотвратить ошибки инфузии, вызванные изменениями условий окружающей среды, которые не контролируются при помощи специализированных датчиков, таких как термометры или датчики давления.
Наконец, настоящее изобретение позволяет выполнить вычисление смещения насосной мембраны, зная характеристики пьезоэлектрического привода (6) и напряжение, необходимое для достижения одного или нескольких механических упоров (2). Определение с субмикронной точностью смещения мембраны (103) с помощью датчика давления (104), встроенного в кремниевый микронасос, представляет собой высокотехнологичную, точную, эффективную, компактную и низкозатратную альтернативу другим средствам измерения, таким как оптические датчики или датчики приближения.
Способ определения VAct Optimal..
В дальнейшем описании будет объясняться принцип действия для единственного механического упора (2). Однако тот же принцип можно распространить на системы с двумя механическими упорами (см. ФИГ.4) или несколькими механическими упорами. Для каждого механического упора i оптимальное напряжение VAct Optimal i можно определить с использованием того же подхода. Можно измерить значения оптимального напряжения в процессе изготовления и сохранить их в памяти прибора, например EEPROM или другом эквивалентном устройстве, как показано на ФИГ.2.
Для определения оптимального возбуждающего напряжения системы в последующих параграфах в качестве примеров предлагаются различные способы.
Способ 1: способ обучения за несколько ходов при движении сверху вниз.
Первый способ реализуется следующим образом (см. ФИГ.5 и ФИГ.6):
1. Для выполнения первого(-ых) хода(-ов) нового насоса максимальное возбуждающее напряжение VAct Max подается на пьезоэлектрический привод (6), который благодаря своей конструкции (превышение размеров) обеспечивает достижение насосной мембраной (1) механических упоров 2, и, вследствие этого, оптимальный по точности процесс работы насоса.
2. Измерительное устройство (например, 104) включается, одновременно или не одновременно с работой насоса, для записи во времени одной или нескольких точек замера, например, соответствующих давлению или объему жидкости. Эти данные формируют номинальную характеристику, которая соответствует номинальному ходу.
3. Для последующих ходов возбуждающее напряжение VAct постепенно уменьшается с заданной величиной ступеньки ΔV. Каждый раз измеренная характеристика сравнивается с номинальной характеристикой, что позволяет определить, достигла ли мембрана механических упоров (2) или нет.
4. Когда разность между измеренной и номинальной характеристикой выше, чем заданный порог, четко определяется, что мембрана больше не достигает положения механического упора (2). Таким образом, последнее значение напряжения принимается в качестве наименьшего напряжения, позволяющего выполнить правильный и точный ход насоса, и сохраняется как VAct Optimal<VAct Max.
5. Для всех последующих ходов используется напряжение VAct Optimal (как определено выше), тем самым обеспечивая минимальное потребление электроэнергии и оптимальную работу насоса.
Точки 1-4 образуют фазу обучения, которая используется для точного определения оптимально необходимой энергии (т.е. возбуждающего напряжения). Эта фаза обучения может выполняться в процессе заливки насоса перед пуском. Кроме того, она может повторяться периодически для учета физических изменений в системе (усталость, механическая деформация, изменение условий окружающей среды…) или даже адаптации к изменению окружающей среды.
Способ 2: способ обучения за один ход при движение снизу вверх.
Способ обучения при движении снизу вверх реализуется следующим образом (см. ФИГ.7 и ФИГ.8):
1. Для выполнения первого хода нового насоса минимальное возбуждающее напряжение VAct Min подается на пьезоэлектрический привод (6), который обеспечивает недостижение мембраной (1) механических упоров (2).
2. Спустя некоторый промежуток времени Δt, который обеспечивает механическую стабилизацию системы, подается приращение напряжения ΔV.
3. Одновременно или неодновременно с увеличением напряжения измерительное устройство включается для записи во времени одной или нескольких точек замера.
4. Затем эти данные обрабатываются, чтобы определить, вызвало ли увеличение напряжения смещение пьезоэлектрического привода (6). Если да, это означает, что механический упор (2) еще не был достигнут, поскольку пьезоэлектрический привод переместился после двух последовательных приращений напряжения, поэтому процесс возобновляется с точки 2.
5. Если никакое смещение не было обнаружено, можно заключить, что пьезоэлектрический привод 6 достиг механического упора (2), поэтому приращения напряжения не оказали никакого воздействия. Таким образом, последнее увеличение напряжения было ненужным, и напряжению VAct Optimal присваивается предшествующее значение напряжения.
6. Для всех последующих ходов используется напряжение VAct Optimal (как определено выше), тем самым обеспечивая минимальное потребление электроэнергии и оптимальную работу насоса.
Способ 3: способ обучения за один ход при движении сверху вниз.
Этот способ, изображенный на ФИГ.9, аналогичен предшествующему, за исключением того, что первое линейно изменяющееся напряжение достигает значения, которое во всех случаях выше оптимального напряжения. Напряжение уменьшается за несколько шагов, при этом одновременно контролируется сигнал датчика, например, давление. Пока мембрана (1) остается в контакте с механическим упором (2), никакой значительный сигнал датчика не будет обнаружен. Как только будет обнаружен сигнал датчика, превышающий определенный порог, считается, что мембрана (1) больше не находится в контакте с механическим упором (2), и предыдущее значение напряжения рассматривается в качестве VAct Optimal.
Другие способы приближения.
Три представленных выше способа представляют собой способы приближения, в которых данные датчика используются для того, чтобы оптимизировать значение напряжения и приблизиться к VAct Optimal. Однако для приближения к VAct Optimal существуют многочисленные способы, которые не ограничиваются тремя упомянутыми. Кроме того, можно использовать алгоритм, который позволяет найти оптимальное напряжение в кратчайшее время, используя ступеньки напряжения ΔV, которые начинаются с больших значений и постепенно уменьшаются, например, следуя геометрической прогрессии (1/2, 1/4, 1/8, 1/16, …).
Способ 4: способ обучения при помощи модуляции.
Этот способ обучения при помощи модуляции, который изображен на ФИГ.11, включает шаг использования быстрого сигнала напряжения переменного тока, который модулирует или накладывается на стандартное линейно изменяющееся напряжение возбуждения. После этого осуществляется контроль сигнала датчика для оценки его чувствительности к быстрому сигналу напряжения переменного тока. Чувствительность будет высокой, если мембрана (1) не достигла механических упоров (2), и низкой, если механический упор (2) достигнут. Таким образом, можно определить порог, начиная с которого можно считать, что механические упоры (2) достигнуты. Значение базового линейно изменяющегося напряжения в этом момент используется затем в качестве VAct Optimal. Одним из явных преимуществ этого способа является устойчивость в отношении гистерезиса независимо от направления изменения напряжения базового возбуждающего сигнала.
Определение сигнала напряжения переменного тока не ограничивается прямоугольным сигналом, представленным на ФИГ.11. Этот сигнал может иметь различную форму (треугольную, синусоидальную…), с различными амплитудами, рабочими циклами и частотой. Демодуляцию сигнала датчика, как правило, можно осуществить при помощи полосового фильтра.
При использовании биморфного или мультиморфного пьезоэлектрического изгибного элемента можно также не подавать сигнал напряжения переменного тока на приводимый в действие электрод, но подавать его на другой(-ие) электрод(ы), как показано на ФИГ.12. Поляризация пьезоэлектрического изгибного элемента, как правило, ориентирована перпендикулярно поверхности электрода, чтобы быть параллельной или антипараллельной приложенному электрическому полю. Для пьезоэлектрических изгибных биморфных элементов с постоянной отрицательного заряда d31 поляризация обычно параллельна электрическому полю при высоких значениях приложенного поля. При этом в дальнейшем активный слой сжимается в плоскости XY, перпендикулярной электрическому полю. Поскольку на другой слой (слои) питание обычно не подается, это приводит к подъему конца изгибного элемента, когда другой его конец зажат, приклеен или закреплен иным способом. Чтобы увеличить смещение конца изгибного элемента и повысить блокирующее усилие, можно приложить небольшое антипараллельное электрическое поле к другому слою (слоям). Электрическое поле на другом активном слое (слоях) можно поэтому модулировать с помощью сигнала напряжения переменного тока в целях поиска оптимального напряжения на первом слое (слоях): основное смещение получают при помощи первого пьезоэлектрического слоя (слоев), который подвергается действию сильного электрического поля, параллельного направлению его поляризации (возбуждающее напряжение), при этом небольшая модуляция положения насосной мембраны достигается за счет использования сигнала переменного тока (модулирующее напряжение) на другом пьезоэлектрическом слое (слоях). Преимущество здесь заключается в значительном уменьшении потребления электроэнергии и полном разделении электронной схемы на возбуждающую часть и импульсную или модулирующую часть. Этот способ можно экстраполировать на другую ориентацию поляризации, пьезоэлектрические материалы (титанат-цирконат свинца…), типы (изгибные элементы…) и формы (круглые, прямоугольные…), на любые конфигурации электродов и мультиморфные пьезоэлектрические приводы.
Настоящее изобретение не ограничивается описанными выше вариантами осуществления, которые приведены в качестве примеров и не должны рассматриваться как ограничивающие объем настоящего изобретения. Возможны варианты, использующие эквивалентные средства и входящие в объем изобретения. Например, способ и устройство согласно настоящему изобретению могут использоваться с приводами (актуаторами), отличными от пьезоэлектрического привода, описанного выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫДАЮЩЕЕ ЖИДКОСТЬ УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА С НИЗКОПРОФИЛЬНЫМ НАСОСОМ | 2010 |
|
RU2536199C1 |
| УСТРОЙСТВО, ГЕНЕРИРУЮЩЕЕ АЭРОЗОЛЬ, В КОТОРОМ ИСПОЛЬЗУЕТСЯ ВИБРАЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ И УПРАВЛЯЕМАЯ ПОДАЧА ЖИДКОСТИ | 2022 |
|
RU2841129C2 |
| МИКРОНАСОС | 1991 |
|
RU2030634C1 |
| УСТРОЙСТВО, ГЕНЕРИРУЮЩЕЕ АЭРОЗОЛЬ | 2017 |
|
RU2752391C2 |
| СИСТЕМА ЭЛЕКТРОННОГО ИСПАРИТЕЛЯ | 2016 |
|
RU2707892C2 |
| УСТРОЙСТВО, ГЕНЕРИРУЮЩЕЕ АЭРОЗОЛЬ | 2017 |
|
RU2779205C2 |
| МЕХАНИЧЕСКИЙ ПРИВОД | 2013 |
|
RU2619657C2 |
| ГЕНЕРИРУЮЩАЯ АЭРОЗОЛЬ СИСТЕМА С НАСОСОМ | 2016 |
|
RU2725368C2 |
| БЕСПЛАМЕННАЯ ЭЛЕКТРОННАЯ СИГАРЕТА С РАСПЫЛЕНИЕМ | 2004 |
|
RU2336001C2 |
| НАСОСНЫЕ СИСТЕМЫ ДОСТАВКИ ТЕКУЧИХ СРЕД И СПОСОБЫ ПРИМЕНЕНИЯ УСТРОЙСТВА ПРИЛОЖЕНИЯ УСИЛИЯ | 2007 |
|
RU2447905C2 |



Изобретение относится к электронной системе управления и высокотехнологичному процессу оптимизации потребления электроэнергии микронасосным устройством и проверки надежности функционирования насосного механизма. Способ приведения в действие насосного устройства происходит при помощи оптимального возбуждающего напряжения. Насосное устройство включает по меньшей мере насосную камеру (4), имеющую насосную мембрану (1), впускную камеру (3) и выпускную камеру (5), управляемый напряжением привод (актуатор) (6), присоединенный к указанной насосной мембране (1). Указанная насосная мембрана достигает по меньшей мере одного положения остановки, определяемого механическим упором (2). Во время хода насоса по меньшей мере один датчик, позволяющий определить, достигла ли насосная мембрана по меньшей мере одного указанного механического упора (2). Способ включает фазу обучения и рабочую фазу, причем фаза обучения включает по меньшей мере следующие шаги. Приводят в действие насосную мембрану (1), подавая заданное возбуждающее напряжение VΑct на привод (6). Указанное напряжение достаточно велико, чтобы указанная насосная мембрана (1) достигла указанного положения на шаге избыточного возбуждения, или достаточно мало, чтобы указанная насосная мембрана (1) не достигла положения указанного механического упора (2) в процессе недостаточного возбуждения. После шага избыточного возбуждения уменьшают приложенное возбуждающее напряжение, пока не будет определено, что насосная мембрана (1) оставила указанное положение механического упора (2). Сохраняют в качестве оптимального напряжения VΑct Οptimal наименьшее значение напряжения, приложенное до того, как насосная мембрана (1) оставила указанное положение механического упора (2). На шаге недостаточного возбуждения увеличивают приложенное напряжение, пока не будет определено, что насосная мембрана (1) достигла указанного положения механического упора (2), и сохраняют в качестве оптимального напряжения VΑct Οptimal наименьшее значение напряжения, приложенное, когда насосная мембрана (1) достигла указанного положения механического упора (2). Далее приводят в действие насосное устройство в рабочей фазе при помощи определенного оптимального значения напряжения VΑct Οptimal. Значительно уменьшается потребление электроэнергии. 2 н. и 16 з.п. ф-лы, 13 ил.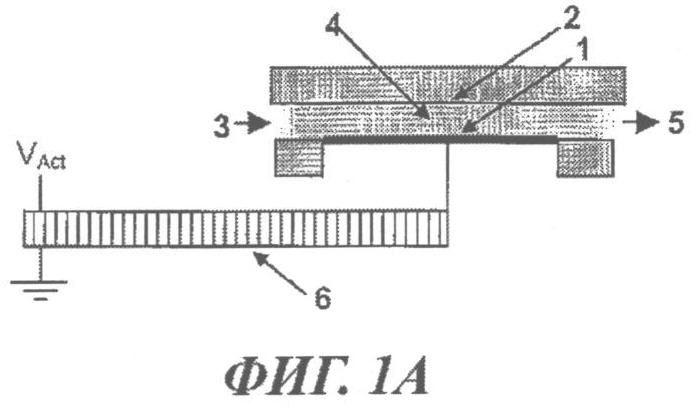
1. Способ приведения в действие насосного устройства при помощи оптимального возбуждающего напряжения, причем насосное устройство включает по меньшей мере:
насосную камеру (4), имеющую насосную мембрану (1), впускную камеру (3) и выпускную камеру (5),
управляемый напряжением привод (6), присоединенный к насосной мембране (1), причем насосная мембрана достигает по меньшей мере одного положения остановки, определяемого механическим упором (2), во время хода насоса,
по меньшей мере один датчик для определения, достигла ли насосная мембрана по меньшей мере одного механического упора (2),
при этом способ включает фазу обучения и рабочую фазу, причем фаза обучения включает по меньшей мере следующие шаги:
- приводят в действие насосную мембрану (1), подавая заданное возбуждающее напряжение VΑct на привод (6), при этом указанное напряжение достаточно велико, чтобы насосная мембрана (1) достигла указанного положения на шаге избыточного возбуждения, или достаточно мало, чтобы насосная мембрана (1) не достигла указанного положения механического упора (2) в процессе недостаточного возбуждения;
- после шага избыточного возбуждения уменьшают приложенное возбуждающее напряжение, пока не будет определено, что насосная мембрана (1) оставила указанное положение механического упора (2), и сохраняют в качестве оптимального напряжения VΑct Οptimal наименьшее значение напряжения, приложенное до того, как насосная мембрана (1) оставила указанное положение механического упора (2); или
- на шаге недостаточного возбуждения увеличивают приложенное напряжение, пока не будет определено, что насосная мембрана (1) достигла указанного положения механического упора (2), и сохраняют в качестве оптимального напряжения VΑct Οptimal наименьшее значение напряжения, приложенное, когда насосная мембрана (1) достигла указанного положения механического упора (2);
- приводят в действие насосное устройство в рабочей фазе при помощи определенного оптимального значения напряжения VΑct Οptimal.
2. Способ по п.1, отличающийся тем, что впускная камера (3) и выпускная камера (5) насосного устройства содержат пассивные клапаны.
3. Способ по п.1, отличающийся тем, что после шага избыточного возбуждения
- включают датчик (104), одновременно или не одновременно с работой насоса, для записи во времени одной или нескольких точек замера, формирующих номинальную характеристику, которая соответствует номинальному ходу;
- для последующих ходов возбуждающее напряжение VAct постепенно уменьшают с заданной ступенькой ΔV;
- для каждого уменьшения возбуждающего напряжения измеренную характеристику сравнивают с номинальной характеристикой, что позволяет определить, достигла ли уже насосная мембрана (1) по меньшей мере одного из механических упоров (2);
- когда разность между измеренной и номинальной характеристикой выше, чем заданный порог, определяют, что мембрана (1) больше не достигает положения механического упора (2);
- последнее значение напряжения принимают в качестве наименьшего напряжения, позволяющего выполнить правильный и точный ход насоса, и сохраняют как VAct Optimal
<VΑct Max;
- для всех последующих ходов используют напряжение VAct Οptimal, тем самым обеспечивая минимальное потребление электроэнергии и оптимальную работу насоса.
4. Способ по п.1, отличающийся тем, что после шага недостаточного возбуждения
- спустя некоторый промежуток времени Δt, который обеспечивает механическую стабилизацию системы, подают приращение напряжения ΔV;
- одновременно или не одновременно с увеличением напряжения включают датчик (104) для записи во времени одной или нескольких точек замера;
- затем обрабатывают эти данные, чтобы определить, вызвало ли увеличение напряжения смещение привода (6);
- если обнаружено смещение, это означает, что механический упор (2) еще не был достигнут, поскольку привод (6) переместился после двух последовательных приращений напряжения, поэтому процесс возобновляют с приращением напряжения;
- если никакое смещение не было обнаружено, то делают вывод, что привод (6) достиг механического упора (2), поэтому приращения напряжения не оказали никакого воздействия, последнее увеличение напряжения было ненужным, и напряжению VΑct Οptimal присваивают предшествующее значение напряжения;
- для всех последующих ходов используют напряжение VAct Οptimal, как определено выше, тем самым обеспечивая минимальное потребление электроэнергии и оптимальную работу насоса.
5. Способ по п.3, отличающийся тем, что записывают, при помощи датчика (104), данные, соответствующие потоку, или давлению на пути движения жидкости, или положению насосной мембраны (1), или деформации механического упора (2), или насосной мембраны (1), или привода (6).
6. Способ по п.1, отличающийся тем, что ступеньки уменьшения или увеличения напряжения постепенно изменяют.
7. Способ по п.6, отличающийся тем, что начальные ступеньки больше, чем последующие.
8. Способ по п.1, отличающийся тем, что накладывают модулирующее напряжение на приложенное возбуждающее напряжение, причем указанное модулирующее напряжение имеет амплитуду, по меньшей мере в два раза ниже, чем возбуждающее напряжение, и частоту, по меньшей мере в два раза выше, чем возбуждающее напряжение, при этом осуществляют контроль данных датчика (104), чтобы оценить его чувствительность к сигналу модулирующего напряжения, и считают, что чувствительность высока, если насосная мембрана (1) не достигла механического упора (2), и низка, если насосная мембрана (1) достигла механического упора (2).
9. Способ по одному из предшествующих пунктов, отличающийся тем, что привод (6) представляет собой пьезоэлектрический привод.
10. Способ по п.9, отличающийся тем, что пьезоэлектрический привод (6) состоит по меньшей мере из двух активных слоев, причем возбуждающее напряжение подают на электроды первого активного слоя, а модулирующее напряжения подают на электроды второго активного слоя, причем указанное модулирующее напряжение имеет амплитуду, по меньшей мере в два раза ниже, чем возбуждающее напряжение, и частоту, по меньшей мере в два раза выше, чем возбуждающее напряжение, при этом осуществляют контроль данных датчика (104), чтобы оценить его чувствительность к сигналу модулирующего напряжения, и считают, что чувствительность высока, если насосная мембрана (1) не достигла механического упора (2), и низка, если насосная мембрана (1) достигла механического упора (2).
11. Способ по п.1, отличающийся тем, что его осуществляют в процессе заливки насоса перед пуском либо повторно, чтобы учесть изменения в системе.
12. Насосное устройство с оптимальным возбуждающим напряжением, содержащее по меньшей мере следующие компоненты:
насосную камеру (4), имеющую насосную мембрану (1), впускную камеру (3) и выпускную камеру (5),
привод (6), присоединенный к насосной мембране (1), причем насосная мембрана (1) достигает по меньшей мере одного положения остановки, определяемого механическим упором (2), во время хода насоса,
датчик(и) (104) для определения, достигла ли мембрана по меньшей мере одного указанного механического упора (2),
средство обработки для хранения и обработки данных,
при этом указанное устройство выполнено с возможностью осуществления способа, охарактеризованного в одном из предшествующих пунктов.
13. Насосное устройство по п.12, отличающееся тем, что управляемый напряжением привод (6) представляет собой пьезоэлектрический привод.
14. Насосное устройство по п.12, отличающееся тем, что впускная камера (3) и/или выпускная камера (5) представляют собой клапан(ы).
15. Насосное устройство по п.14, отличающееся тем, что клапаны представляют собой пассивные обратные клапаны.
16. Насосное устройство по п.12, отличающееся тем, что насосная камера (4) имеет два механических упора (2).
17. Насосное устройство по одному из пп.12-16, отличающееся тем, что датчик (104) представляет собой датчик давления.
18. Насосное устройство по п.17, отличающееся тем, что датчик (104) представляет собой датчик давления, расположенный в насосной камере (4).
| US5759015A, 02.06.1998 | |||
| МИКРОНАСОС | 1991 |
|
RU2030634C1 |
| СПОСОБ ПЕРИСТАЛЬТИЧЕСКОГО НАГНЕТАНИЯ, ШЛАНГОВЫЙ НАСОС И ШЛАНГ | 2007 |
|
RU2372523C2 |
| US6280148B1, 28.08.2001 | |||
| US5085562A, 04.02.1992 | |||
| Тормозная система многосекционного железнодорожного тягового средства | 1977 |
|
SU737273A1 |

