Область техники изобретения
Настоящее изобретение относится к конусной дробилке, содержащей внешний дробящий корпус и внутренний дробящий корпус, образующие между ними разгрузочную щель, причем внешний дробящий корпус поддерживается на элементе верхней рамы в вертикально регулируемом зацеплении с элементом нижней рамы, причем упомянутое вертикально регулируемое зацепление выполнено с возможностью регулирования вертикального положения внешнего дробящего корпуса относительно элемента нижней рамы, для того чтобы обеспечить регулирование ширины разгрузочной щели. Конусная дробилка дополнительно содержит конструкцию датчика, снабженную элементом датчика, установленным на один из элемента нижней рамы и элемента верхней рамы.
Уровень техники
Конусная дробилка может быть использована для эффективного дробления материала, такого как камень, руда и так далее, до меньших размеров. US 2010/0102152 A1 описывает пример конусной дробилки. В такой конусной дробилке материал дробится между внешним дробящим корпусом, который установлен в раму, и внутренним дробящим корпусом, который установлен на дробящий конус. Материал дробится путем приведения дробящего конуса в гирационное движение, так что он катится по внешнему дробящему корпусу посредством материала, подлежащего дроблению.
Дробилка по US 2010/0102152 A1 снабжена датчиком приближения для измерения положения внешнего дробящего корпуса. Положение внешнего дробящего корпуса должно быть измерено с высокой точностью, чтобы обеспечить эффективную операцию дробления и раздробленный материал, имеющий требуемые свойства.
Сущность изобретения
Задача настоящего изобретения состоит в обеспечении дробилки, имеющей повышенную степень точности в части измерения вертикального положения регулируемого дробящего корпуса.
Эта задача достигается конусной дробилкой, содержащей внешний дробящий корпус и внутренний дробящий корпус, образующие между собой разгрузочную щель, причем внешний дробящий корпус поддерживается на элементе верхней рамы в вертикально регулируемом зацеплении с элементом нижней рамы, причем упомянутое вертикально регулируемое зацепление выполнено с возможностью регулирования вертикального положения внешнего дробящего корпуса относительно элемента нижней рамы, для того чтобы обеспечить регулирование ширины разгрузочной щели, и конструкцию датчика, снабженную элементом датчика, установленным на один из элемента нижней рамы и элемента верхней рамы, для измерения вертикального положения внешнего дробящего корпуса, в которой дробилка дополнительно содержит индикаторное средство, выполненное с возможностью быть детектированным упомянутым элементом датчика, в котором одно из индикаторного средства и элемента датчика выполнено с возможностью следования за вертикальным перемещением элемента верхней рамы и перемещения относительно другого из индикаторного средства и элемента датчика, причем упомянутый элемент датчика содержит вертикальную чувствительную матрицу, которая продолжается в вертикальном направлении вдоль по меньшей мере участка диапазона, в пределах которого индикаторное средство может перемещаться при регулировании вертикального положения элемента верхней рамы, и причем индикаторное средство выполнено с возможностью быть детектированным в различных вертикальных положениях вдоль вертикальной чувствительной матрицы.
Эта дробилка имеет преимущество в том, что вертикальное положение внешнего дробящего корпуса может быть измерено с высокой точностью. Это становится возможным, поскольку расстояние между элементом датчика и индикаторным средством может быть коротким и однозначно определено во всем диапазоне перемещения такого индикатора. Следовательно, датчик выполнен с возможностью отслеживания, например, изменений электромагнитного чувствительного поля в горизонтальном направлении. Путем отслеживания в горизонтальном направлении постоянное расстояние между индикатором и датчиком может поддерживаться.
Индикатор может содержать окружной фланец, для того чтобы еще больше повысить точность измерения вертикального положения внешнего дробящего корпуса и/или обеспечить снижение риска повреждения чувствительного компонента(ов) конструкции датчика.
Согласно варианту выполнения окружной фланец расположен снаружи на элементе верхней рамы и конструкция датчика установлена на элементе нижней рамы, чтобы обеспечить робастное и надежное измерение вертикального положения.
Предпочтительно элемент датчика содержит датчик, который способен регистрировать присутствие индикаторного средства без какого-либо физического контакта с ним. Элемент датчика и индикатор индикаторного средства предпочтительно расположены с зазором между ними, чтобы предотвратить повреждение элемента датчика.
Согласно одному варианту выполнения элемент датчика содержит индуктивный датчик. Тогда вертикальный чувствительный массив может содержать катушки, организованные в массив катушек. Преимуществом индуктивного датчика является то, что такой датчик имеет хорошую возможность точного измерения положения индикаторного средства в условиях сильных ударов и сильных вибраций. Этот вариант выполнения имеет преимущество в том, что достигается очень робастное и надежное измерение вертикального положения.
Расстояние между внешней поверхностью упомянутого чувствительного массива и индикатором упомянутого индикаторного средства может быть по существу постоянным.
Согласно варианту выполнения индикаторное средство содержит скользящий элемент, выполненный с возможностью упора по меньшей мере в участок упомянутого фланца. Этот вариант выполнения имеет преимущество в том, что перемещение индикатора индикаторного средства, причем индикатором может являться сам скользящий элемент или элемент, установленный на скользящий элемент, может быть ограничено в вертикальном перемещении, что может улучшить робастность и надежность конструкции датчика, поскольку предотвращается возможное повреждение чувствительного компонента(ов) конструкции датчика.
Индикаторное средство предпочтительно содержит упругий элемент, выполненный с возможностью прижатия скользящего элемента по меньшей мере к участку упомянутого фланца, для того чтобы обеспечить следование скользящего элемента за вертикальными перемещениями фланца и, таким образом, за перемещениями элемента верхней рамы.
Упругий элемент предпочтительно является пружиной, такой как пружина сжатия.
Скользящий элемент предпочтительно снабжен индикатором, выполненным из магнитного металлического материала, такого как сталь, который выполнен с возможностью быть детектированным элементом датчика. Преимуществом этого варианта выполнения является то, что сам скользящий элемент не обязательно подлежит детектированию элементом датчика и, таким образом, может быть выполнен из материала, который главным образом выбран с учетом подходящих свойств для скольжения к фланцу.
Согласно варианту выполнения индикатор индикаторного средства имеет вертикальную высоту, которая лежит в диапазоне от 2 до 25 мм.
Краткое описание чертежей
Изобретение далее будет описано более подробно и со ссылкой на прилагаемые чертежи.
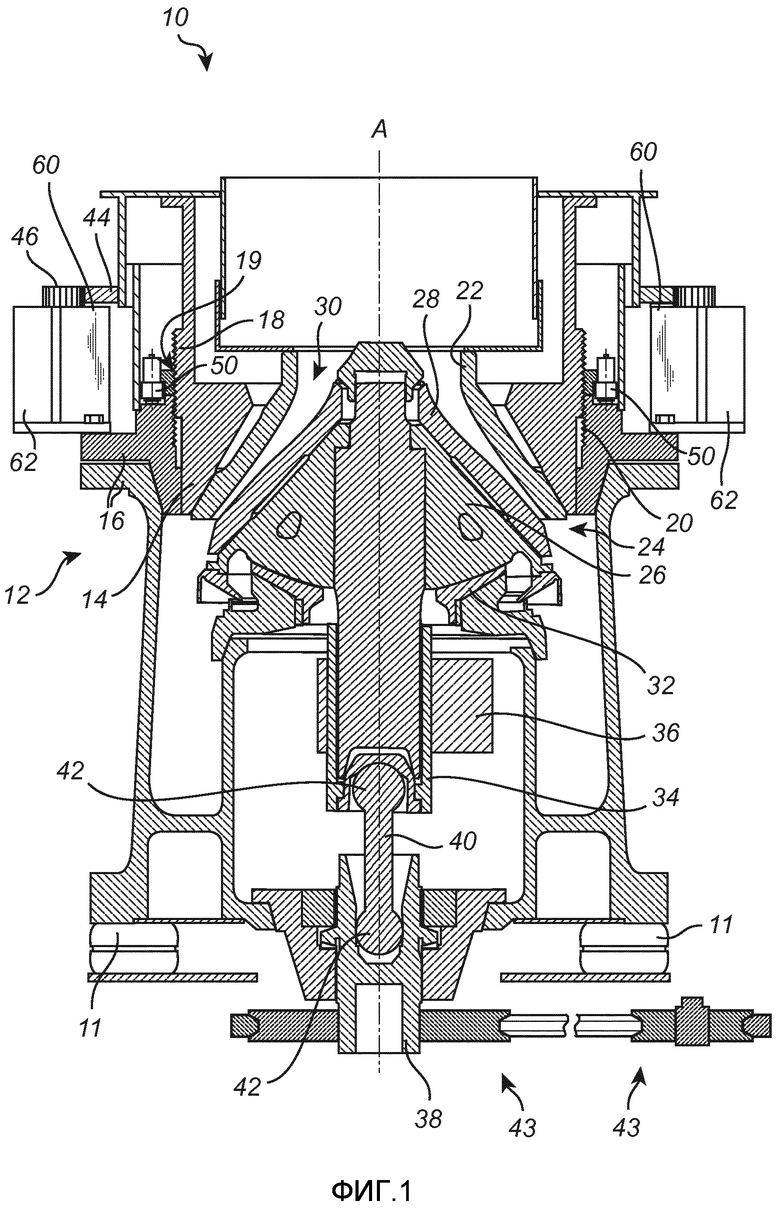
Фиг. 1 - сечение и изображает схематично конусную дробилку согласно одному варианту выполнения.
Фиг. 2 - схематичный вид в перспективе конусной дробилки с фиг. 1 и изображает конструкцию датчика согласно первому варианту выполнения.
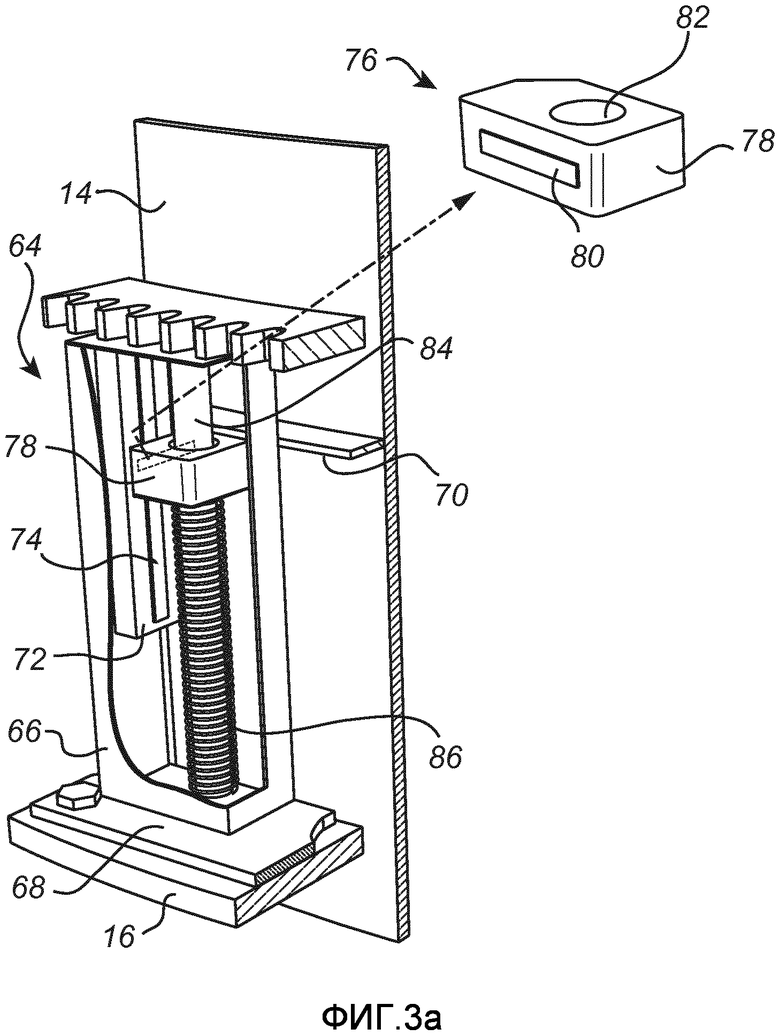
Фиг. 3a - увеличенный вид конструкции датчика, изображенной на фиг. 2, показанной в первом положении.
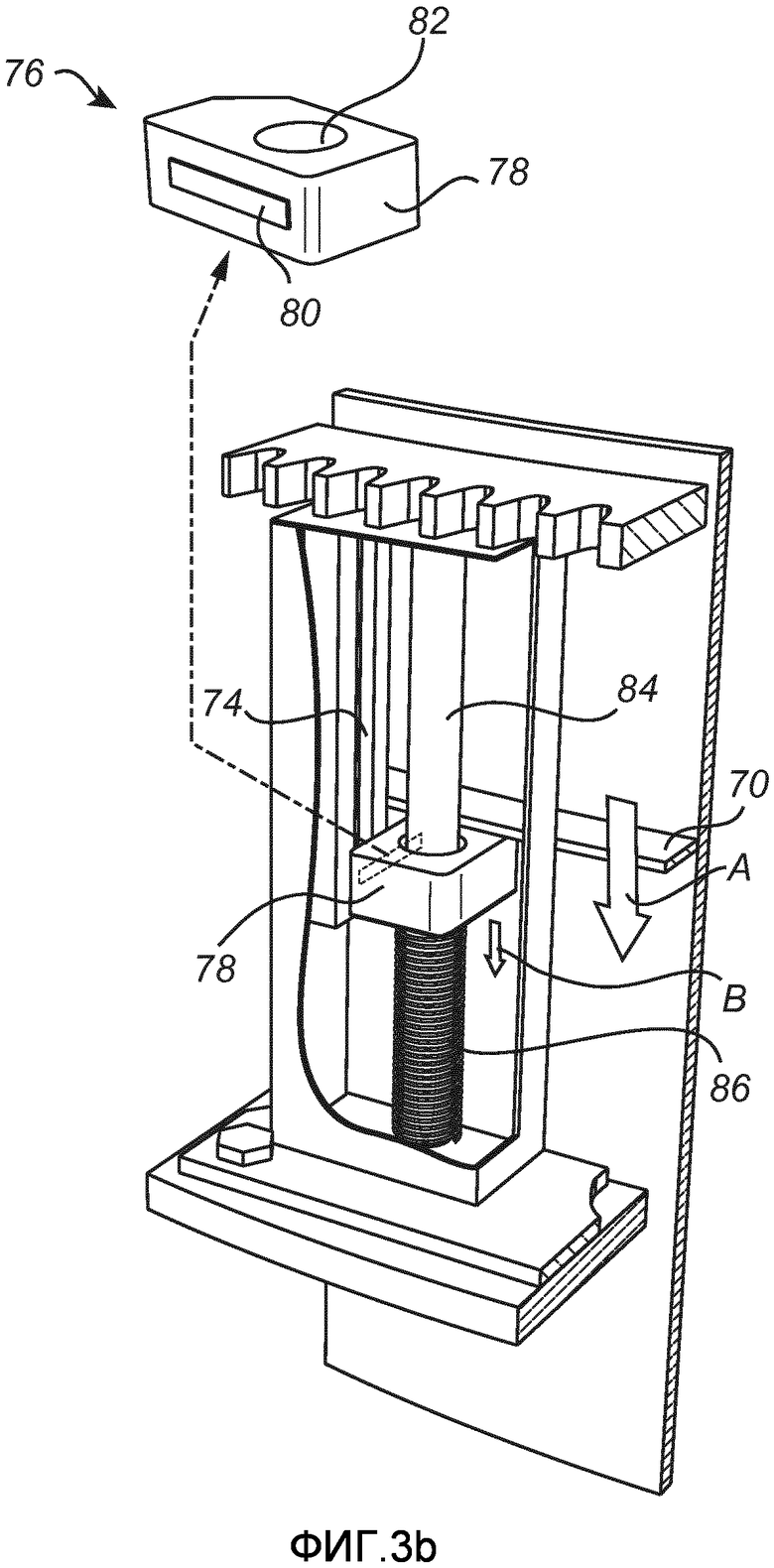
Фиг. 3b - увеличенный вид конструкции датчика, показанной во втором положении.
Фиг. 4a - схематичный, частично в сечении, вид в перспективе, изображает конструкцию датчика согласно второму варианту выполнения.
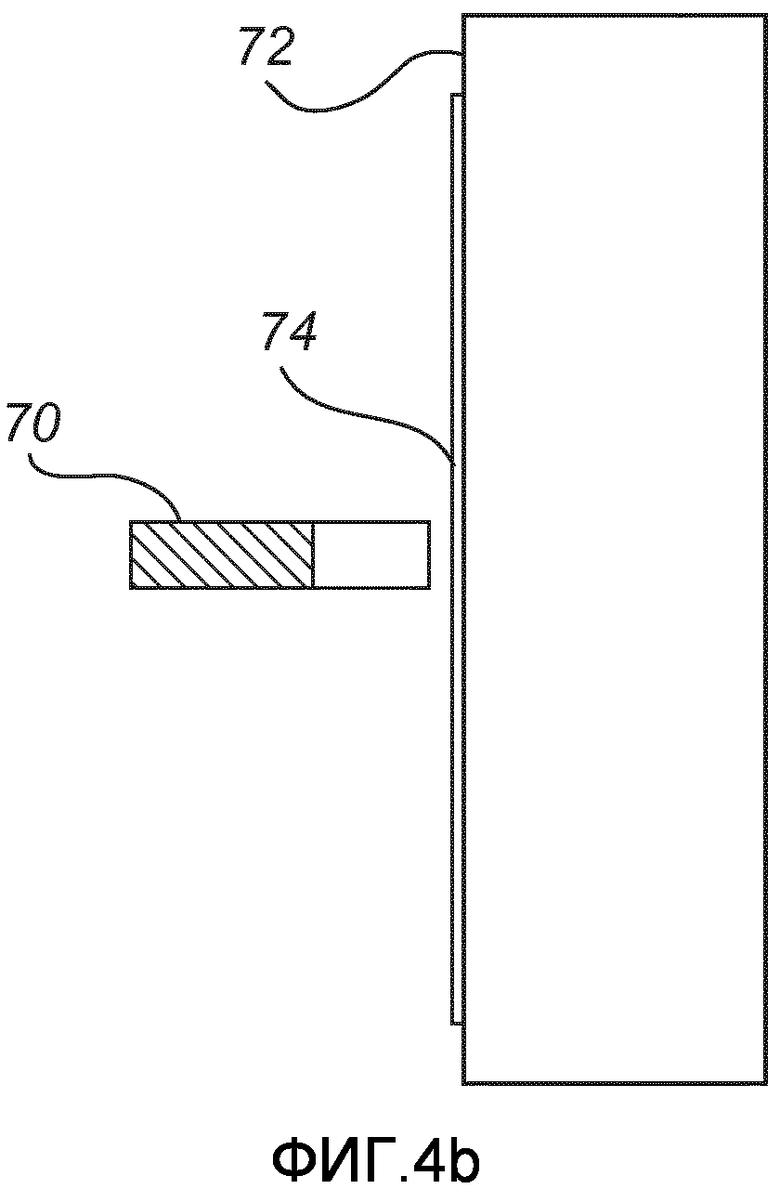
Фиг. 4b - схематичный, частично в сечении, вид сбоку, изображает конструкцию датчика с фиг. 4a.
Подробное описание предпочтительных вариантов выполнения
Фиг. 1 и 2 изображают конусную дробилку 10, которая является конусной дробилкой инерционного типа. Конусная дробилка 10 содержит раму 12 дробилки, в которую установлены различные детали дробилки 10. Рама 12 поддерживается на амортизаторах 11 для гашения колебаний, возникающих во время дробящего действия.
Рама 12 дробилки содержит элемент 14 верхней рамы, который имеет форму цилиндра, и элемент 16 нижней рамы. Элемент 14 верхней рамы снабжен внешней резьбой 18, которая взаимодействует с внутренней резьбой 20 элемента 16 нижней рамы таким образом, что внешняя и внутренняя резьбы 18, 20 вместе образуют вертикально регулируемое зацепление элемента 14 верхней рамы с элементом 16 нижней рамы в виде резьбового зацепления 19.
Элемент 14 верхней рамы поддерживает, на его внутренней стороне, внешний дробящий корпус 22. Элемент 16 нижней рамы поддерживает конструкцию 24 внутреннего дробящего корпуса. Конструкция 24 внутреннего дробящего корпуса содержит дробящий конус 26, который имеет форму конуса и который поддерживает внутренний дробящий корпус 28. Внешний и внутренний дробящие корпуса 22, 28 образуют между ними разгрузочную щель 30, к которой подается материал, который подлежит дроблению.
Дробящий конус 26 опирается на сферический подшипник 32, который поддерживается элементом 16 нижней рамы. Следовательно, дробящий конус 26 с внутренним дробящим корпусом 28, поддерживаемым на нем, поддерживается элементом 16 нижней рамы. Дробящий конус 26 поворотно соединен с дебалансной втулкой 34, которая имеет форму цилиндрической гильзы. Дебалансный груз 36 установлен на одной стороне дебалансной втулки 34. Дебалансная втулка 34 соединена на ее нижнем конце с приводным валом 38 посредством трансмиссионного вала 40. Универсальные шарниры 42 трансмиссионного вала 40 позволяют смещение нижнего конца дебалансной втулки 34 от вертикальной оси A во время работы дробилки 10.
Когда дробилка 10 работает, приводной вал 38 вращается мотором непоказанным способом, например, посредством ременного привода 43. Вращение приводного вала 38 вызывает вращение дебалансной втулки 34, и в результате этого вращения дебалансная втулка 34 наклоняется наружу под действием центробежной силы, воздействию которой подвержен дебалансный груз 36. Объединенное вращение и качание дебалансной втулки 34 заставляет дробящий конус 26 совершать гирационное движение вокруг вертикальной оси, так что материал дробится в разгрузочной щели 30, образованной между внешним и внутренним дробящими корпусами 22, 28.
Ширина разгрузочной щели 30 может регулироваться путем поворота элемента 14 верхней рамы посредством резьб 18, 20 так, чтобы регулировалось вертикальное расстояние между корпусами 22, 28. С этой целью элемент 14 верхней рамы снабжен кольцевым зубчатым венцом 44. Зубчатый венец 44 находится в зацеплении с шестерней 46, которая выполнена с возможностью вращения мотором регулировки разгрузочной щели (не показан), установленным внутри кронштейна 62 мотора, установленного в элемент 16 нижней рамы. Управляя мотором регулировки разгрузочной щели, шестерня 46 поворачивает зубчатый венец 44 и, таким образом, также элемент 14 верхней рамы, так что элемент 14 верхней рамы вертикально перемещается резьбовым зацеплением 19. Таким образом, внешний дробящий корпус 22 также вертикально перемещается, так что ширина разгрузочной щели 30 регулируется.
Как наилучшим образом показано на фиг. 2, зубчатый венец 44 соединен с элементом 14 верхней рамы посредством шпоночных скользящих зацеплений 57, которые позволяют зубчатому венцу 44 оставаться в зацеплении с шестерней 46, в то время как элемент 14 верхней рамы вертикально перемещается. Шпоночные скользящие зацепления 57 образованы вертикальными планками 56, прикрепленными к элементу 14 верхней рамы, которые скреплены шпонкой с соответствующими выемками 58 внутренней окружности зубчатого венца 44. Таким образом, зубчатый венец 44 вращательно прикреплен к элементу 14 верхней рамы и может скользить вертикально вдоль планок 56. Зубчатый венец 44 опирается и скользит, когда поворачивается, по верхнему участку опорного кронштейна 62 мотора.
Переходя к описанию фиг. 2, конусная дробилка 10 содержит конструкцию 64 датчика для измерения вертикального положения элемента 14 верхней рамы и внешнего дробящего корпуса 22, поддерживаемого им. Конструкция 64 датчика содержит корпус 66 датчика, который установлен на кронштейн 68 корпуса датчика, установленный в элемент 16 нижней рамы.
Элемент 14 верхней рамы снабжен окружным фланцем 70, как будет описано более подробно со ссылкой на фиг. 3a и 3b. Выступающий наружу фланец 70 неподвижно закреплен на элементе 14 верхней рамы болтами (не показаны).
Фиг. 3a и 3b изображает более подробно конструкцию 64 датчика. Конструкция 64 датчика содержит элемент 72 датчика, установленный внутри корпуса 66 датчика на его боковой стенке. Элемент 72 датчика содержит вытянутый вертикальный чувствительный массив 74, который продолжается в вертикальном направлении. Вертикальный чувствительный массив 74 обычно может иметь вертикальную высоту, которая находится в диапазоне от 50 до 2000 мм. Вертикальный чувствительный массив 74 обычно может иметь горизонтальную ширину, которая находится в диапазоне от 0,1 до 200 мм. В этом варианте выполнения элемент 72 датчика содержит индуктивный датчик положения. Такой индуктивный датчик положения формирует индуктивное поле, которое смещается вдоль чувствительной поверхности и регистрирует металлический индикатор в диапазоне детектирования индуктивного поля. Индуктивный датчик содержит несколько катушек, организованных в массив катушек. Следовательно, в этом варианте выполнения вертикальный чувствительный массив 74 содержит массив катушек. Индуктивный датчик вычисляет текущее положение индикатора и обеспечивает выходной сигнал либо в виде аналогового сигнала, пропорционального расстоянию, либо в виде определяемого положения переключения. Индуктивное чувствительное поле продолжается вдоль вертикальной высоты вертикального чувствительного массива 74. Элемент 72 датчика, таким образом, способен регистрировать вертикальное положение вдоль вертикального чувствительного массива 74 металлического индикатора без какого-либо физического контакта с ним. Выходной сигнал датчика принимается блоком управления (не показан), присоединенным к элементу 72 датчика.
Дробилка 10 содержит индикаторное средство 76, выполненное с возможностью следования за вертикальным перемещением элемента 14 верхней рамы. В этом варианте выполнения индикаторное средство 76 содержит скользящий элемент 78, металлический индикатор 80, прикрепленный к скользящему элементу 78, и окружной фланец 70.
Скользящий элемент 78 снабжен отверстием 82, в которое вставляется направляющий стержень 84. Направляющий стержень 84 установлен внутри корпуса 66 датчика для направления перемещения скользящего элемента 78. Скользящий элемент 78 расположен вокруг направляющего стержня 84 и, таким образом, способен перемещаться в вертикальном направлении, направляемый направляющим стержнем 84. Пружина 86 сжатия расположена вокруг направляющего стержня 84 между скользящим элементом 78 и нижней пластиной корпуса 66 датчика, чтобы прикладывать вертикальное прижимающее усилие к скользящему элементу 78. Скользящий элемент 78 прижимается вертикально вверх и к фланцу 70 и, таким образом, упирается в нижний участок выступающего наружу фланца 70.
Вертикальное регулирование элемента 14 рамы достигается вращением зубчатого венца 44 посредством шестерни 46 и мотора регулировки, как описано выше со ссылкой на фиг. 2. В одном примере, начиная с положения, изображенного на фиг. 3a, элемент 14 верхней рамы перемещается вертикально вниз. Затем фланец 70, который жестко прикреплен к элементу 14 верхней рамы, смещается вниз, как показано стрелкой A на фиг. 3b. Скользящий элемент 78, который упирается в нижний участок фланца 70, затем следует за вертикальным перемещением фланца 70, как показано стрелкой В на фиг. 3b. Следовательно, перемещение скользящего элемента 78 в этом случае вызвано вертикальным перемещением элемента 14 верхней рамы посредством фланца 70.
При регулировании элемента 14 верхней рамы в направлении вверх фланец 70 смещается вверх. Тогда скользящий элемент 78, который прижат к нижнему участку фланца 70 пружиной 86 сжатия, следует за вертикальным перемещением фланца 70 вследствие усилия пружины 86. Таким образом, перемещение скользящего элемента 78 вверх для следования за перемещением фланца 70 при регулировании верхнего элемента 14 вверх обеспечивается силой, прикладываемой к скользящему элементу 78 пружиной 86 сжатия. Следовательно, индикаторное средство 76, содержащее скользящий элемент 78, выполнено с возможностью следования за вертикальным перемещением элемента 14 верхней рамы вниз, а также вверх.
Для того чтобы сформировать выходной сигнал датчика, индикаторное средство 76 выполнено с возможностью быть детектированным индуктивным датчиком элемента 72 датчика вдоль вертикального чувствительного массива 74. С этой целью индикаторное средство 76 содержит металлический индикатор 80, который прикреплен к скользящему элементу 78 таким образом, что он перемещается вместе со скользящим элементом 78. Вертикальный чувствительный массив 74 продолжается в вертикальном направлении вдоль по меньшей мере участка вертикального диапазона, в пределах которого индикатор 80 может перемещаться при регулировании вертикального положения элемента 14 верхней рамы. Металлический индикатор 80 может иметь вертикальную высоту, которая находится в диапазоне от, например, 2 до 25 мм. Вертикальная высота металлического индикатора 80 подобрана к типу элемента 72 датчика, который используется. В соответствии с одним примером вертикальная высота металлического индикатора 80 может составлять 13 мм. Вертикальный чувствительный массив 74 элемента 72 датчика может регистрировать вертикальное положение индикатора 80 с высокой точностью. В соответствии с одним вариантом выполнения скользящий элемент 78 выполнен из изолирующего материала, такого как пластик, для того чтобы не препятствовать требуемому электрическому взаимодействию между индикатором 80 и вертикальным чувствительным массивом 74 элемента 72 датчика.
Направляющий стержень 84 расположен так, что постоянный зазор обычно около от 0 до 20 мм, например зазор, равный 5 мм, образован между металлическим индикатором 80 и внешней поверхностью чувствительного массива 74. Следовательно, горизонтальное расстояние между индикатором 80 и чувствительным массивом 74 по существу постоянно независимо от действительного вертикального положения элемента 14 верхней рамы, что обеспечивает измерение положения элемента 14 верхней рамы с высокой точностью.
Во время работы конструкции 64 датчика элемент 72 датчика излучает переменное электромагнитное чувствительное поле вдоль чувствительного массива 74. Когда металлический индикатор 80 входит в чувствительное поле, вихревые токи наводятся на индикаторе 80, что уменьшает амплитуду сигнала элемента 72 датчика и приводит к изменению состояния выходного сигнала элемента 72 датчика, принимаемого блоком управления. В этом варианте выполнения использовался индуктивный датчик PMI-F110, коммерчески доступный у Pepperl+FuchsGmbH.
Далее дробилка согласно второму варианту выполнения будет описана со ссылкой на фиг. 4a и 4b. Множество признаков, раскрытых в первом варианте выполнения, также присутствуют во втором варианте выполнения с аналогичными ссылочными позициями, обозначающими аналогичные или такие же признаки. Упомянув это, описание будет сконцентрировано на пояснении отличительных признаков второго варианта выполнения.
Во втором варианте выполнения индикатор индикаторного средства образован самим окружным фланцем 70. Конструкция датчика содержит индуктивный элемент 72 датчика, снабженный вертикальным чувствительным массивом 74, который продолжается в вертикальном направлении вдоль по меньшей мере участка вертикального диапазона, в пределах которого индикаторное средство, то есть фланец 70, может перемещаться при регулировании вертикального положения элемента 14 верхней рамы. Элемент 72 датчика расположен так, что чувствительный массив 74 обращен к переднему краю фланца 70. Фланец 70, таким образом, выполнен с возможностью быть детектированным в различных вертикальных положениях вдоль вертикального чувствительного массива 74. Элемент 72 датчика расположен так, что зазор образован между передним краем фланца 70 и чувствительным массивом 74, как наилучшим образом показано на фиг. 4b. В этом варианте выполнения скользящий элемент, как раскрыто в первом варианте выполнения, не требуется, поскольку сам фланец 70 выполнен с возможностью быть детектированным чувствительным массивом 74.
Изобретение главным образом было описано выше со ссылкой на некоторые варианты выполнения. Однако, как легко понятно специалисту в данной области техники, другие варианты выполнения, отличные от раскрытых выше, равновозможны в пределах объема изобретения, определенного прилагаемой формулой изобретения.
Например, изобретение не ограничено каким-либо конкретным типом конусной дробилки; напротив, оно подходит для множества различных типов конусных дробилок, известных специалистам в данной области техники, таким как тип дробилки, имеющий верхнюю часть вала дробящего конуса, установленную в крестовину в сборе, а также тип дробилки, который описан в патенте США № 1894601, иногда называемый дробилкой Саймонса, и инерционный тип конусной дробилки, раскрытый здесь, имеющий дебалансный груз для обеспечения гирационного движения дробящего конуса.
Элемент датчика может содержать другой тип датчика, отличный от описанного здесь ранее. Например, элемент датчика может содержать емкостной или фотоэлектрический датчик. В случае если элемент датчика содержит фотоэлектрический датчик, индикаторное средство предпочтительно содержит пластиковый индикатор.
Выше было описано, что элемент датчика 72 прикреплен к элементу 16 нижней рамы, и индикаторное средство выполнено с возможностью следования за вертикальным перемещением элемента 14 верхней рамы. Взамен в альтернативном варианте выполнения элемент датчика может быть выполнен с возможностью следования за вертикальным перемещением элемента 14 верхней рамы, например, посредством опоры на фланец 70. Тогда неподвижный индикатор, например, в виде кольцевого обода, может быть неподвижно прикреплен к элементу 16 нижней рамы.
Взамен пружины 86 сжатия, как раскрыто в первом варианте выполнения, другая конструкция может быть использована для прижатия скользящего элемента 78 по меньшей мере к участку фланца 70. Например, пружина растяжения может быть использована для этой цели. Тогда скользящий элемент 78 выполнен с возможностью упора по меньшей мере в верхний участок фланца.
Выше было описано, что окружной фланец 70 неподвижно прикреплен к элементу 14 верхней рамы. Ясно, что в качестве альтернативы окружной фланец может быть выполнен за одно с элементом 14 верхней рамы.
Дополнительные объекты и признаки настоящего изобретения будут понятны из следующего подробного описания и формулы изобретения.

Изобретение относится к конусной дробилке. Дробилка содержит внешний (22) и внутренний (28) дробящие корпусы с разгрузочной щелью (30) между ними. Элемент (14) верхней рамы поддерживает внешний корпус в зацеплении с элементом (16) нижней рамы. Зацепление выполнено с возможностью регулирования вертикального положения внешнего корпуса относительно элемента нижней рамы для обеспечения регулирования ширины разгрузочной щели. Конструкция (64) датчика снабжена элементом (72) датчика на одном из элементов нижней рамы и верхней рамы для измерения вертикального положения внешнего корпуса. Одно из индикаторного средства (76, 80, 70) и элемента (72) датчика выполнено с возможностью следования за вертикальным перемещением элемента верхней рамы и перемещения относительно другого. Элемент датчика содержит вертикальный чувствительный массив (74) в вертикальном направлении вдоль по меньшей мере участка диапазона. Индикаторное средство имеет возможность перемещаться при регулировании вертикального положения элемента верхней рамы в пределах участка диапазона. Индикаторное средство выполнено с возможностью быть детектированным в различных вертикальных положениях вдоль вертикального чувствительного массива. Изобретение повышает точность измерения вертикального положения регулируемого дробящего корпуса. 11 з.п. ф-лы, 4 ил.
1. Конусная дробилка, содержащая внешний дробящий корпус (22) и внутренний дробящий корпус (28), образующие между собой разгрузочную щель (30), причем внешний дробящий корпус (22) поддерживается на элементе (14) верхней рамы в вертикально регулируемом зацеплении с элементом (16) нижней рамы, причем вертикально регулируемое зацепление выполнено с возможностью регулирования вертикального положения внешнего дробящего корпуса (22) относительно элемента (16) нижней рамы для обеспечения регулирования ширины разгрузочной щели (30), и конструкцию (64) датчика, снабженную элементом (72) датчика, установленным на одно из элемента (16) нижней рамы и элемента (14) верхней рамы для измерения вертикального положения внешнего (22) дробящего корпуса, отличающаяся тем, что дополнительно содержит индикаторное средство (76, 80; 70), выполненное с возможностью быть детектированным элементом (72) датчика, причем одно (76, 80; 70) из индикаторного средства (76, 80; 70) и элемента (72) датчика выполнено с возможностью следования за вертикальным перемещением элемента (14) верхней рамы и перемещения относительно другого (72) из индикаторного средства (76, 80; 70) и элемента (72) датчика, причем элемент (72) датчика содержит вертикальный чувствительный массив (74), который проходит в вертикальном направлении вдоль по меньшей мере участка диапазона, в пределах которого индикаторное средство (76, 80; 70) имеет возможность перемещаться при регулировании вертикального положения элемента (14) верхней рамы, причем индикаторное средство (76, 80; 70) выполнено с возможностью быть детектированным в различных вертикальных положениях вдоль вертикального чувствительного массива (74).
2. Конусная дробилка по п.1, в которой индикаторное средство (76, 80; 70) содержит окружной фланец (70).
3. Конусная дробилка по п.2, в которой окружной фланец (70) расположен снаружи на элементе (14) верхней рамы и конструкция (64) датчика установлена на элементе (16) нижней рамы.
4. Конусная дробилка по любому из пп.1-3, в которой чувствительный массив (74) и индикатор (80; 70) индикаторного средства (76, 80; 70) расположены с зазором между ними.
5. Конусная дробилка по любому из пп.1-3, в которой элемент (72) датчика содержит индуктивный датчик.
6. Конусная дробилка по любому из пп.1-3, в которой расстояние между внешней поверхностью чувствительного массива (74) и индикатором (80; 70) индикаторного средства (76, 80; 70) постоянно.
7. Конусная дробилка по п.2, в которой индикаторное средство (76, 80; 70) содержит скользящий элемент (78), выполненный с возможностью упора по меньшей мере в участок упомянутого фланца (70).
8. Конусная дробилка по п.7, в которой индикаторное средство (76) содержит упругий элемент (86), выполненный с возможностью прижима скользящего элемента (78) по меньшей мере к участку упомянутого фланца (70).
9. Конусная дробилка по п.8, в которой упругий элемент (86) является пружиной, такой как пружина (86) сжатия.
10. Конусная дробилка по любому из пп.7-9, в которой скользящий элемент (78) снабжен индикатором (80), который выполнен с возможностью быть детектированным элементом (72) датчика.
11. Конусная дробилка по любому из пп.1-3, в которой индикаторное средство содержит индикатор (80; 70), выполненный из магнитного металлического материала, такого как сталь.
12. Конусная дробилка по п.11, в которой индикатор (80) имеет вертикальную высоту, которая находится в диапазоне от 2 до 25 мм.
| US 2010102152 A1, 29.04.2010 | |||
| US 4717084 A, 05.01.1988 | |||
| Устройство для регулирования разгрузочной щели конусной эксцентриковой дробилки | 1978 |
|
SU749429A1 |
| Устройство для контроля и регулирования угла нутации конуса инерционной дробилки | 1986 |
|
SU1416181A1 |

