4
шяЛ.
О5
ас
Изобретение относится к устройст вам, предназначенным для контроля и регулирования работы конусных инерци онных дробилок.
I Целью изобретения является повыае |ние точности и надежности регулирования.
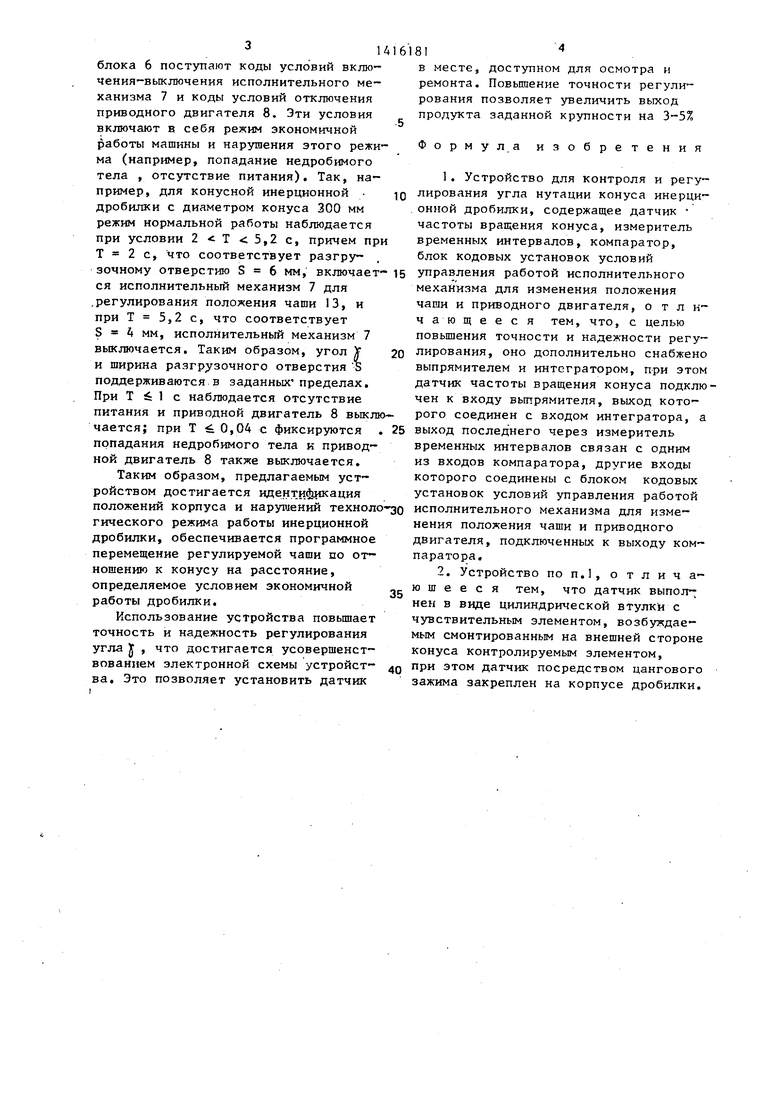
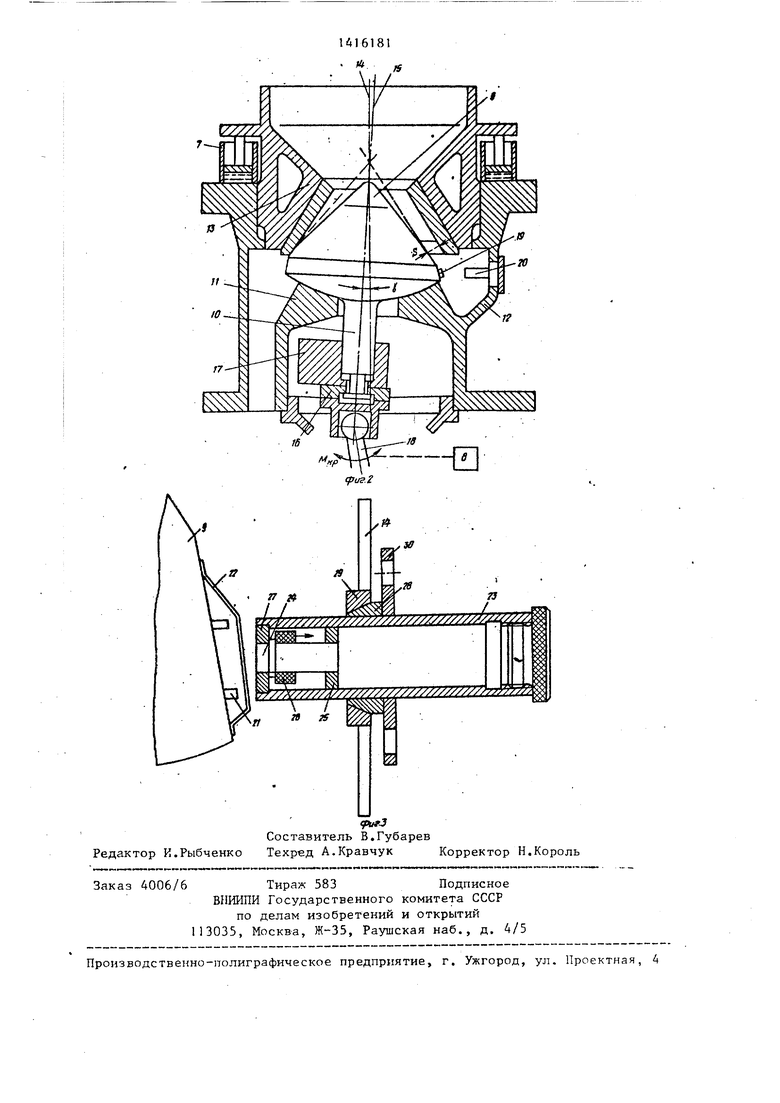
На фиг.1 приведена блок-схема устройства для контроля и регулирования угла нутации конуса инерционной дробилки; на фиг,2 - показано располо |жение в конусной инерционной дробил- Ке датчика, входящего в состав уст- )ойства; на фиг.Я вариант конструк- |ции датчика,
I Устройство содержит датчик 1 , выпрямитель 2, интегратор 3, измеритель 4 временных интервалов, компаратор l5 (блок сравнения), блок 6 кодовых Остановок условий управления работой 1сполнительного механизма 7 и привод- fioro двигателя 8, подключенных к выводу компаратора 5.
Конусная инерционная дробилка, для регулирования которой предназ- начено предлагаемое устройство, содержит конус 9, который жестко закреплен на валу 10 и поддерживается опорой 11, связанной с корпусом 12 дробилки, и подвижную регулируемую часть - чашу 13, расположенную над конусом 9, причем ось 14 чаши 13 является вертикальной осью дробил- ки и в состоянии, когда вал 10 неподвижен, его ось и, следовательно, ось конуса 9 практически совпадают с вертикальной осью 14. При качаниях зала 10 его ось 15 образует с верти- Кальной осью 14-угол у ,который определяет разгрузочное отверстие Я. Для изменения параметра S чаша 13 установлена в корпусе 12 с возможностью перемещения относительно конуса 9, что осуществляется с помощью исполнительного механизма 7. Вал 10 конуса 9 нижним концом помещен во втулку
16,на которой закреплен дебаланс
17.Вращение последнему передается от двигателя 8 с помощью, например, шарового шпинделя 18, верхняй головка которого гаарнирно установлена во втулке 16. Датчик 1 содержит контролируемый элемент 19, установленный
на внешней поверхности конуса 9 в нижней его части, и чувствительный .элемент 20, жестко связанный с корпусом 12 дробилки.
0 5 0 5
Q
5
В качестве контролируемого элемента 19 можно использовать, например, постоянные магниты 21, снабженные соответствующей арматурой 22 их крепления к конусу 9 для защиты от воздействия падаюьчей руды и формирующие магнитное поле согласно назначению датчика. Чувствительный элемент 20 датчика может быть выполнен в виде ферромагнитного цилиндра 23 с сердечником 24 и шайбой 25, образующими магнитопровод, несущий сосредоточенно расположенную катушку индуктивности - обмотку 26 возбуждения, при этом шайба 27 вьтолнена из немагнитного материала. Цилиндр 23 посредством цангового зажима, состоящего из сухаря 28, бобышки 29 и фланца 30, прикреплен к корпусу 12 дробилки. Такое крепление обеспечивает возможность изменения положения обмоки 26 возбуждения по отношению к магниту 21, что позволяет устанавливать опти мальную магнитную связь между контролируемым элементом 19 и чувствительным элементом 20.
Устройство работает следующим образом.
Под действием крутящего момента дебаланс 17 вращается с частотой f вокруг вала 10 конуса 9. Цоследний в режиме холостого хода ббкатьшается по внутренней поверхности чаши 13, а в рабочем режиме - по дробимому материалу. Контролируемый элемент 19 при этом движется по эпициклоиде, совершая один оборот вокруг вертикальной оси 14 за время Т. В спектре такого движения элемента 19 преобладают две частоты: частота f вращения конуса вокруг оси 14 и частота f вращения дебаланса 17. При прохождении элемента 19 в зоне чувствительности элемента 20 последний возбуждается и вырабатьшает импульс, поступающий на вход выпрямителя 2. Выпрямленный сигнал поступает далее на вход интегратора 3, который вьщеляет огибающую сигнала. Сигналы 31,32 и 33 на выходах датчика 1, вьтрямителя 2 и интегратора 3 соответственно показаны на фиг.1. С выхода интегратора 3 сигнал 33 поступает на вход измерителя 4 временных интервалов Т, с выхода которого нормированный сигнал поступает на первый вход компаратора 5s на другие входы которого с выходов
3i4
блока 6 поступают коды условий включения-выключения исполнительного механизма 7 и коды условий отключения приводного двигателя 8. Эти условия включают в себя режим экономичной работы машины и нарушения этого режима (например, попадание недробимого тела , отсутствие питания). Так, например, для конусной инерционной дробилки с диаметром конуса 300 мм режим нормальной работы наблюдается при условии 2 Т 5,2 с, причем при Т 2 с, что соответствует разгрузочному отверстию 5 6 мм, включает- ся исполнительный механизм 7 для ,регулирования положения чаши 13, и при Т 5,2 с, что соответствует S ii мм, исполнительный механизм 7 выключается. Таким образом, угол У и ширина разгрузочного отверстия S поддерживаются в заданных пределах. При Т 1 с наблюдается отсутствие питания и приводной двигатель 8 выключается; при Т 0,04 с фиксируются . попадания недробимого тела к приводной двигатель 8 также вьпслючается.
Таким образом, предлагаемым устройством достигается идeнт.ифJ кaция положений корпуса и наруп№ний техноло гического режима работы инерционной дробилки, обеспечивается программное перемещение регулируемой чаши по отношению к конусу на расстояние, определяемое условием экономичной работы дробилки.
Использование устройства повышает точность и надежность регулирования угла J , что достигается усовершенствованием электронной схемы устройст- на. Это позволяет установить датчик
5 i
5 0 5
о
о
81
в месте, доступном для осмотра и ремонта. Повышение точности регулирования позволяет увеличить выход продукта заданной крупности на 3-5%
Форму л а изобретения
1.Устройство для контроля и регулирования угла нутации конуса инерционной дробилки, содержащее датчик частоты вращения конуса, измеритель временных интервалов, компаратор, блок кодовых установок условий управления работой исполнительного механ изма для изменения положения чаши и приводного двигателя, отличающееся тем, что, с целью повышения точности и надежности регулирования, оно дополнительно снабжено выпрямителем и интегратором, при этом датчик частоты вращения конуса подключен к входу выпрямителя, выход которого соединен с входом интегратора, а выход последнего через измеритель временных интервалов связан с одним
из входов компаратора, другие входы которого соединены с блоком кодовых установок условий управления работой исполнительного механизма для изменения положения чаши и приводного двигателя, подключенных к выходу компаратора,
2.Устройство по п.1, о т л и ч а- ю ш е е с я тем, что датчик выпол ней в виде цилиндрической втулки с чувствительным элементом, возбуждаемым смонтированным на внешней стороне конуса контролируемым элементом,
при этом датчик посредством цангового зажима закреплен на корпусе дробилки.
1416181 )«
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования угла нутации конуса инерционной дробилки | 1985 |
|
SU1286283A1 |
| Способ контроля и регулирования угла нутации конуса инерционной дробилки и устройство для его осуществления | 1984 |
|
SU1217474A1 |
| Устройство для контроля разгрузочной щели конусной инерционной дробилки | 1977 |
|
SU940844A1 |
| Устройство для регулирования разгрузочной щели конусной эксцентриковой дробилки | 1978 |
|
SU749429A1 |
| Устройство для контроля и регулированияРАзгРузОчНОй щЕли КОНуСНОйиНЕРциОННОй дРОбилКи | 1977 |
|
SU808152A1 |
| Устройство для регулирования загрузки конусной дробилки | 1985 |
|
SU1255210A2 |
| Устройство для регулирования производительности конусной дробилки | 1982 |
|
SU1039561A1 |
| Конусная дробилка | 1982 |
|
SU1044327A1 |
| Устройство для управления загрузкой конусной инерционной дробилки | 1989 |
|
SU1701377A1 |
| Привод конусной гирационной дробилки | 1983 |
|
SU1140823A1 |
Изобретение относится к устройствам для контроля и регулирования угла нутации конуса инерционной дробилки. Целью изобретения является повышение точности и надежности регулирования. Устройство используется для программного. перемеп(ения подвижной регулируемой части конусной дробилки, например чагаи, по отношению к конусу на расстояние, определяемое условием экономичной работы дробилки. Принцип действия устройства основан на измерении периода вращения конуса вокруг своей оси, который линейно зависит от угла нутации конуса. Устройство содержит датчик 1, выпрямитель 2, интегратор 3, измеритель 4 временных интервалов, компаратор 5, блок 6 кодовых установок условий включения- выключения исполнительного механизма 7 для изменения положения подвижной регулируемой части дробилки и приводного двигателя 8, а датчик вьтолнен в виде цилиндра, связанного с корпу- -сом дробилки сосредством цан1Уового зажима и несущего чзпвствительный элемент, возбуждаемый контролируемым элементом, установленным на внешней поверхности конуса, 1 з.п. ф-лы, 3 ил. 1C (Л CZ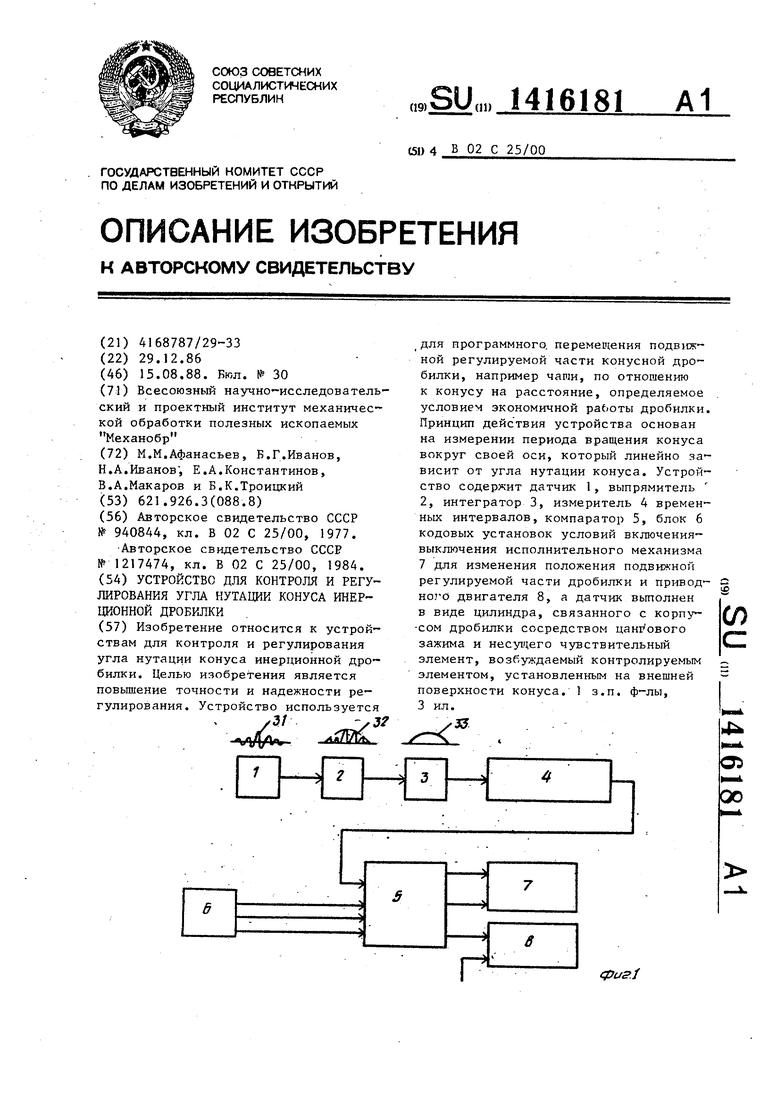
| Устройство для контроля разгрузочной щели конусной инерционной дробилки | 1977 |
|
SU940844A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля и регулирования угла нутации конуса инерционной дробилки и устройство для его осуществления | 1984 |
|
SU1217474A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
