ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к управлению для транспортного средства, включающего в себя двигатель и бесступенчатую трансмиссию, более конкретно, к области техники для того, чтобы подавлять вибрацию транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный документ 1 раскрывает область техники, которая подавляет вибрацию транспортного средства и в которой линия рабочих режимов рабочей точки, используемая для настройки целевой частоты вращения двигателя (частоты вращения входного вала трансмиссии) и целевого крутящего момента двигателя, переключается с линии рабочих режимов для придания большого значения экономии топлива на линию рабочих режимов для уменьшения вибрации, чтобы не допускать рабочей точки, в которой образуются приглушенный шум и вибрация, в области низкосредних частот вращения двигателя и средневысокого крутящего момента, в которой легко образуется вибрация, т.е. в которой отношение величины изменения крутящего момента двигателя к величине изменения частоты вращения двигателя является большим.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. Публикация заявки на патент Японии № 2005-199971
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, КОТОРЫЕ ДОЛЖНО РАЗРЕШАТЬ ИЗОБРЕТЕНИЕ
[0004] Что касается влияния на пассажира вследствие вибрации транспортного средства, даже когда вибрация транспортного средства или анормальный шум, такой как приглушенный шум, образованный посредством этой вибрации, образуется в области низкосредних частот вращения двигателя и средневысокого крутящего момента и т.д., сильное некомфортное ощущение и сильное неестественное ощущение могут не сразу возникать у пассажира. Когда эта вибрация продолжается в течение определенного периода времени (например, приблизительно от 0,5 секунд до 5 секунд), у пассажира возникает неестественное ощущение и некомфортное ощущение, так что качество езды ухудшается. Соответственно, в вышеописанном традиционном примере, в котором рабочая точка сразу переключается на рабочую точку для избегания области вибраций, когда рабочая точка входит в область, в которой легко образуется вибрация, рабочая точка переключается с настройки для придания большого значения экономии топлива на настройку для уменьшения вибрации, в случае если вибрация фактически не образуется либо во время сразу после образования вибрации до того, как у пассажира транспортного средства возникает некомфортное ощущение и неестественное ощущение. Следовательно, настройка для уменьшения вибрации чрезмерно используется, так что с большой вероятностью она приводит к снижению экономии топлива. Кроме того, увеличивается частота переключения рабочей точки. Вследствие этого ощущения при езде, наоборот, могут ухудшаться при переключении за счет изменения крутящего момента и т.д.
[0005] Следовательно, цель настоящего изобретения заключается в том, чтобы предоставлять новое устройство управления для двигателя внутреннего сгорания, которое разрабатывается с возможностью разрешать вышеописанные проблемы, для того чтобы подавлять некомфортное ощущение и неестественное ощущение у пассажира транспортного средства вследствие вибрации транспортного средства, подавлять чрезмерное переключение рабочей точки для недопущения вибрации и подавлять ухудшение общей характеристики управляемости и снижение экономии топлива.
СРЕДСТВО РАЗРЕШЕНИЯ ПРОБЛЕМ
[0006] Для достижения вышеописанной цели настоящее изобретение включает в себя двигатель и бесступенчатую трансмиссию, выполненную с возможностью бесступенчато переключать выходную мощность двигателя и передавать ее на сторону ведущих колес. Кроме того, настоящее изобретение включает в себя средство оценки областей, выполненное с возможностью оценивать, находится или или нет рабочая точка транспортного средства, которая определяется из множества факторов, представляющих состояние приведения в движение транспортного средства, в предварительно определенной области риска возникновения вибрации, в которой может быть образована вибрация транспортного средства; средство измерения периода времени пребывания, выполненное с возможностью измерять период времени пребывания, в течение которого рабочая точка остается в области риска возникновения вибрации, когда определено то, что рабочая точка находится в области риска возникновения вибрации; и средство избегания области вибрации, выполненное с возможностью изменять передаточное отношение бесступенчатой трансмиссии таким образом, что рабочая точка выходит за пределы области риска возникновения вибрации, когда период времени пребывания достигает предварительно определенного периода времени.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0007] В настоящем изобретении, когда рабочая точка остается в области риска возникновения вибрации в течение предварительно определенного периода времени или больше, рабочая точка перемещается за пределы области риска возникновения вибрации посредством изменения передаточного отношения трансмиссии. Соответственно, можно не допускать, чтобы вибрация транспортного средства продолжалась вне рамок предварительно определенного периода времени и предотвращать некомфортное ощущение и неестественное ощущение у пассажира за счет продолжения вибрации транспортного средства. Кроме того, даже когда рабочая точка находится в области риска возникновения вибрации, рабочая точка не переключается при условии, что это состояние не продолжается в течение предварительно определенного периода времени. Соответственно, переключение рабочей точки недопущения вибрации не выполняется чрезмерно до того, как у пассажира возникнет некомфортное ощущение и неестественное ощущение, как в случае, в котором вибрация фактически не образуется, и во время сразу после образования вибрации. Следовательно, можно подавлять ухудшение общей характеристики управляемости и снижение экономии топлива. Соответственно, переключение рабочей точки для недопущения вибрации не выполняется чрезмерно до того, как у пассажира возникнет некомфортное ощущение и неестественное ощущение, как в случае, в котором вибрация фактически не образуется, и во время сразу после образования вибрации. Следовательно, можно подавлять ухудшение общей характеристики управляемости и снижение экономии топлива.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
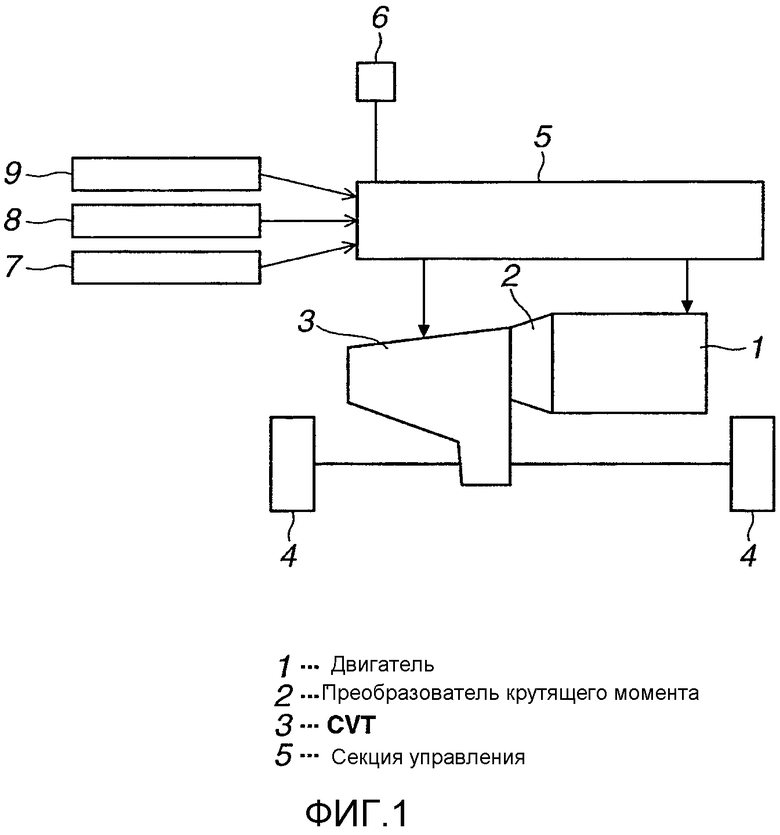
[0008] Фиг. 1 является конфигурационным видом, схематично показывающим устройство управления для транспортного средства согласно одному варианту осуществления настоящего изобретения.
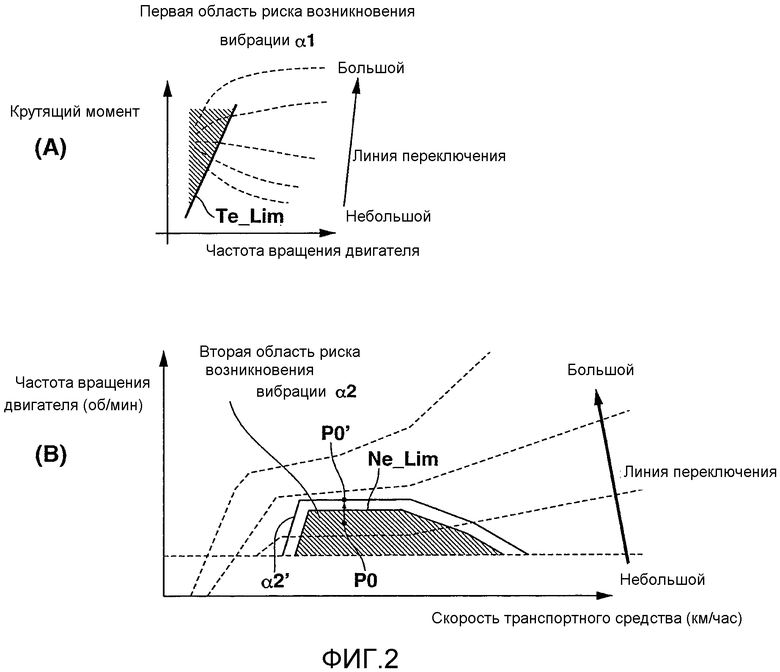
Фиг. 2 является пояснительными видами, показывающими первую область (A) риска возникновения вибрации и вторую область (B) риска возникновения вибрации.
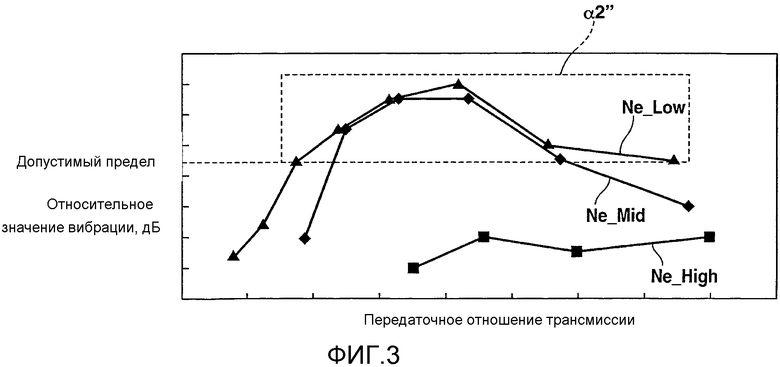
Фиг. 3 является характерным видом, показывающим взаимосвязь между передаточным отношением трансмиссии и вибрацией.
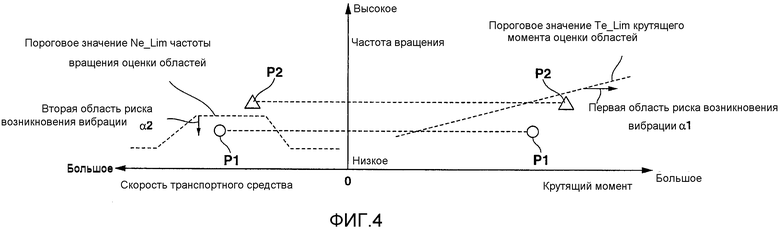
Фиг. 4 является пояснительным видом, показывающим взаимосвязь между рабочими точками, областями риска возникновения вибрации и пороговыми значениями.
Фиг. 5 является блок-схемой последовательности операций способа, показывающей последовательность операций управления согласно вышеописанному варианту осуществления.
Фиг. 6 является характерным видом, показывающим значение Ne0 частоты вращения двигателя до операции фильтрации и значением Ne1 частоты вращения двигателя после операции фильтрации.
Фиг. 7 является характерным видом, показывающим значение Te0 крутящего момента двигателя до операции фильтрации и значением Te1 крутящего момента двигателя после операции фильтрации.
Фиг. 8 является функциональной блок-схемой, показывающей операцию оценки области риска возникновения вибрации.
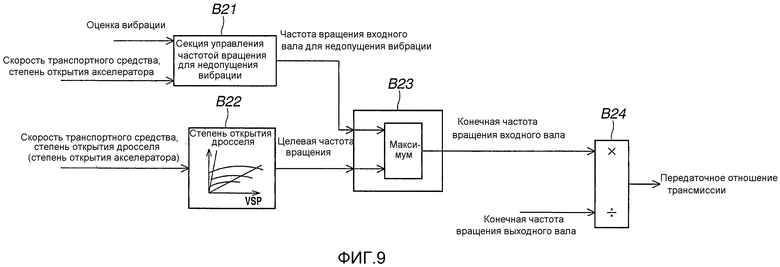
Фиг. 9 является функциональной блок-схемой, показывающей один пример операции вычисления передаточного отношения бесступенчатой трансмиссии при управлении для избегания области вибрации.
Фиг. 10 является временной диаграммой при оценке области риска возникновения вибрации и при управлении для избегания области вибрации, когда применяется управление согласно одному варианту осуществления.
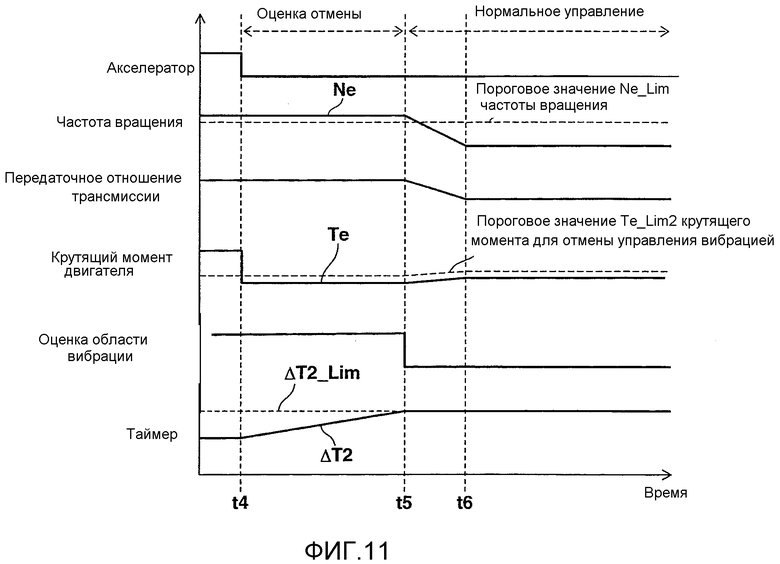
Фиг. 11 является временной диаграммой, показывающей отмену управления для избегания области вибрации, когда применяется управление согласно варианту осуществления.
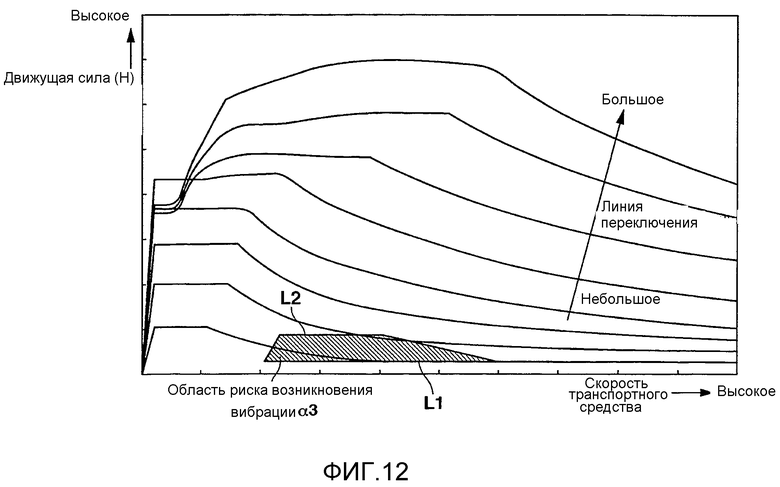
Фиг. 12 является пояснительным видом, показывающим пример области риска возникновения вибрации, определенной посредством движущей силы и скорости транспортного средства.
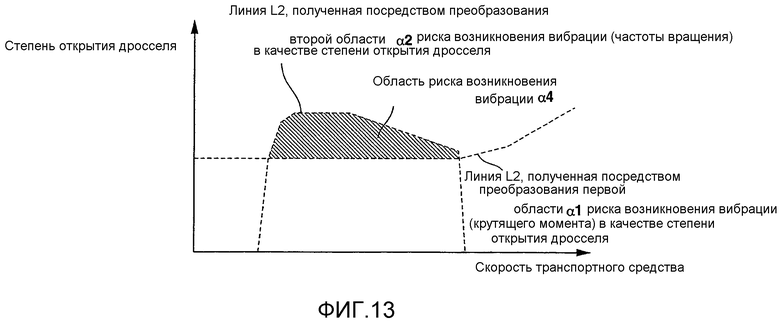
Фиг. 13 является пояснительным видом, показывающим один пример, показывающий область риска возникновения вибрации, определенную посредством степени открытия дросселя и скорости транспортного средства.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009] В дальнейшем в этом документе настоящее изобретение проиллюстрировано в отношении одного варианта осуществления, показанного на чертежах. Фиг. 1 является одним примером транспортного средства, к которому применяется устройство управления согласно одному варианту осуществления настоящего изобретения. Двигатель 1, служащий в качестве источника мощности транспортного средства, соединяется через преобразователь 2 крутящего момента с бесступенчатой трансмиссией 3 (CVT). Бесступенчатая трансмиссия 3 выполнена с возможностью бесступенчато переключать движущую силу двигателя 1 и передавать ее на сторону ведущих колес 4. Секция 5 управления имеет функцию для того, чтобы сохранять различные операции управления и выполнять различные операции управления. Предусматриваются различные датчики, выполненные с возможностью считывать состояние приведения в движение транспортного средства. Эти датчики представляют собой датчик 6 угла поворота коленчатого вала, выполненный с возможностью считывать частоту Ne вращения двигателя (частоту вращения), датчик 7 скорости транспортного средства, выполненный с возможностью считывать скорость транспортного средства, которая представляет собой скорость транспортного средства, датчик 8 степени открытия акселератора, выполненный с возможностью считывать степень открытия акселератора на педали акселератора, которая нажимается водителем, датчик 9 частоты вращения, выполненный с возможностью считывать (введенную) частоту вращения входного вала бесступенчатой трансмиссии 3, и т.д. Секция 5 управления выполнена с возможностью осуществлять управление двигателем, к примеру управление воспламенением топлива, управление распределением зажигания и т.д., на основе сигналов, введенных из этих датчиков 6-9 и т.д. Кроме того, секция 5 управления выполнена с возможностью выводить сигнал переключения коробки передач в бесступенчатую трансмиссию 3 и в силу этого выполнять управление переключением передач, с тем чтобы изменять или поддерживать передаточное отношение трансмиссии.
[0010] Вышеописанный двигатель 1 представляет собой, например, бензиновый двигатель с искровым зажиганием или дизельный двигатель на основе самовоспламенения от сжатия. Кроме того, секция 5 управления может быть отдельно предоставлена в качестве модуля управления двигателем и модуля управления трансмиссией. Этот модуль управления двигателем и модуль управления трансмиссией могут соединяться между собой через систему CAN-связи и т.д., чтобы выполнять двунаправленную связь. Кроме того, транспортное средство не ограничивается транспортным средством, которое использует только двигатель 1 в качестве источника приведения в движение транспортного средства, как показано на чертежах. Транспортное средство может представлять собой гибридное транспортное средство, которое комбинированно использует двигатель 1 и электромотор в качестве источника приведения в движение транспортного средства.
[0011] Фиг. 2 показывает области риска возникновения вибрации, в которых образуется вибрация транспортного средства, которая может вызывать неестественное ощущение или некомфортное ощущение у пассажира транспортного средства. В этом варианте осуществления задаются, в качестве области риска возникновения вибрации, две области в качестве первой области α риска возникновения вибрации, которая определяется посредством частоты вращения двигателя и крутящего момента двигателя, как показано на фиг. 2(A), и второй области α2 риска возникновения вибрации, которая определяется посредством частоты вращения двигателя и скорости транспортного средства (скорости транспортного средства), как показано на фиг. 2(B). В этом случае, как известно, вибрация, образованная в первой области α1 риска возникновения вибрации стороны низкой частоты вращения и высокой нагрузки, в которой частота вращения двигателя является низкой, а крутящий момент двигателя является высоким, представляет собой область, в которой легко образуются приглушенный звук, вибрация днища и т.д. Запрос на снижение вибрации становится серьезным по мере того, как становится более высоким крутящий момент двигателя.
[0012] С другой стороны, вторая область α2 риска возникновения вибрации представляет собой область, которая определяется посредством факторов, отличающихся от факторов вышеописанной области α1 риска возникновения вибрации, т.е. посредством скорости транспортного средства и частоты вращения двигателя. Иными словами, вторая область α2 риска возникновения вибрации представляет собой область (α2″), которая определяется посредством передаточного отношения бесступенчатой трансмиссии 3 и частоты вращения двигателя, как показано на фиг. 3. В отношении этого на фиг. 3 три линии представляют характеристики в состояниях постоянных частот вращения двигателя. Частота вращения двигателя увеличивается в порядке Ne_Low, Ne_Mid и Ne_High. Как показано на фиг. 3, когда передаточное отношение бесступенчатой трансмиссии 3 находится в предварительно определенном промежуточном (среднем) диапазоне (α2″), вибрация становится наибольшей в состоянии постоянной частоты вращения двигателя вследствие действия резонанса крутильных колебаний системы масс (весов) силовой цепи транспортного средства и т.д. Кроме того, вибрация становится большей по мере того, как становится более низкой частота вращения двигателя. Соответственно, вторая область α2 риска возникновения вибрации задается посредством использования скорости транспортного средства и частоты вращения двигателя в качестве факторов, как показано на фиг. 2(B), так что она соответствует области (α2″), в которой вибрация становится большей локально таким образом.
[0013] Кроме того, диапазоны скорости транспортного средства (передаточного отношения трансмиссии) и частоты вращения двигателя, в которых рабочая точка становится второй областью α2 риска возникновения вибрации, изменяются в соответствии с различиями транспортных средств. В качестве одного примера, именно в области низких частот вращения двигателя, частота вращения двигателя равна или меньше приблизительно 1000 об/мин, и передаточное отношение шкивов (передаточное отношение трансмиссии) бесступенчатой трансмиссии 3 составляет приблизительно около 1,0.
[0014] В этом варианте осуществления, когда текущая рабочая точка (точка приведения в движение), определенная посредством частоты вращения двигателя, крутящего момента двигателя и скорости транспортного средства, находится как в первой области α1 риска возникновения вибрации, так и во второй области α2 риска возникновения вибрации и, кроме того, ее период ΔT1 времени пребывания превышает (больше) предварительно определенный период ΔT1_Lim времени оценки вибрации, передаточное отношение бесступенчатой трансмиссии 3 изменяется в большую сторону (нижнюю сторону), чтобы подавлять и не допускать вибрации транспортного средства, так что рабочая точка перемещается за пределы областей α1 и α2 риска возникновения вибрации.
Ниже поясняется подробное содержимое управления.
[0015] В этом варианте осуществления, пороговое значение Te_Lim крутящего момента оценки областей для первой области α1 риска возникновения вибрации вычисляется и задается, в качестве операции оценки областей, в соответствии с частотой вращения двигателя, как показано на фиг. 2 и фиг. 4, для упрощения управляющей логики. Когда крутящий момент Te двигателя равен или превышает пороговое значение Te_Lim крутящего момента оценки областей, оценивается (определяется) первая область α1 риска возникновения вибрации. Кроме того, пороговое значение Ne_Lim частоты вращения оценки областей для второй области α2 риска возникновения вибрации вычисляется и задается в соответствии со скоростью транспортного средства. Когда частота Ne вращения двигателя равна или меньше порогового значения Ne_Lim частоты вращения оценки областей, оценивается (определяется) вторая область α2 риска возникновения вибрации.
[0016] Например, в рабочей точке P1 по фиг. 4 крутящий момент двигателя равен или превышает пороговое значение Te_Lim крутящего момента оценки областей, и частота вращения двигателя равна или меньше порогового значения Ne_Lim частоты вращения оценки областей. Соответственно, оценивается то, что рабочая точка P1 находится в первой и второй областях α1 и α2 риска возникновения вибрации. С другой стороны, в рабочей точке P2 по фиг. 4, крутящий момент двигателя равен или превышает пороговое значение Te_Lim крутящего момента оценки областей. Соответственно, рабочая точка P2 находится в первой области α1 риска возникновения вибрации. Тем не менее, частота вращения двигателя превышает пороговое значение Ne_Lim частоты вращения оценки областей, и, соответственно, рабочая точка P2 выходит за пределы второй области α2 риска возникновения вибрации. Следовательно, оценивается то, что рабочая точка P2 выходит за пределы области риска возникновения вибрации.
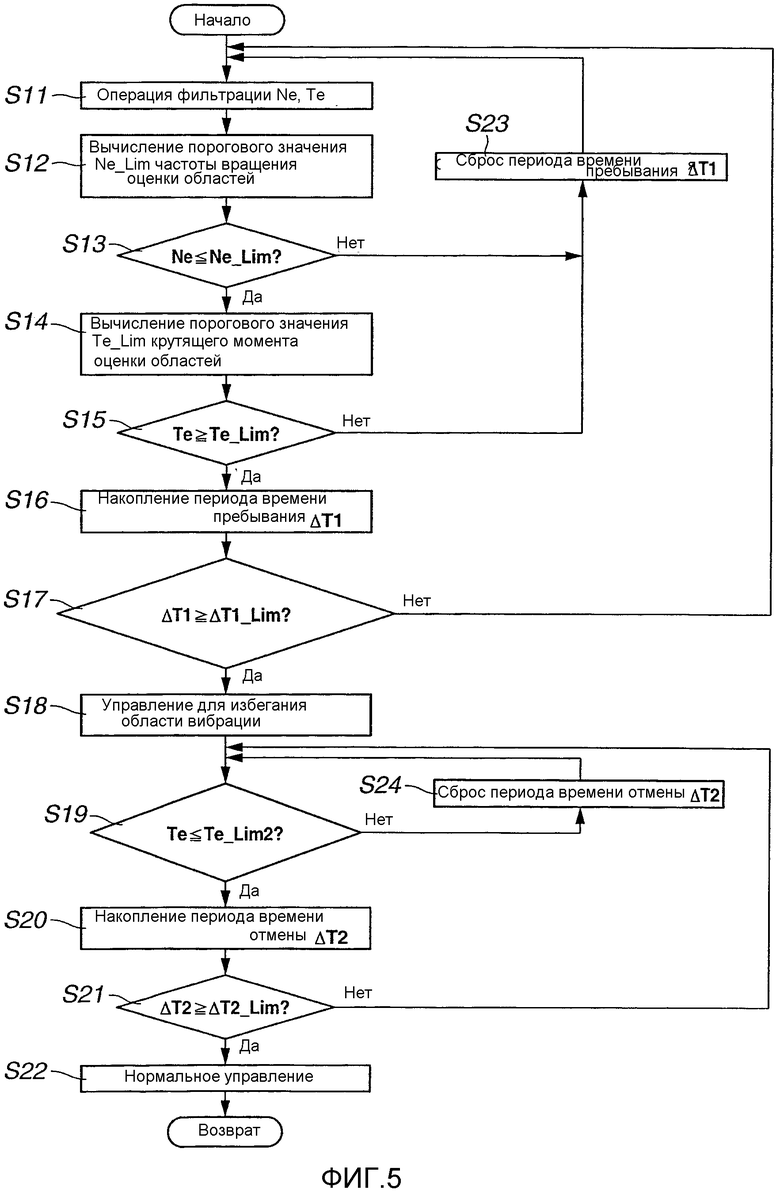
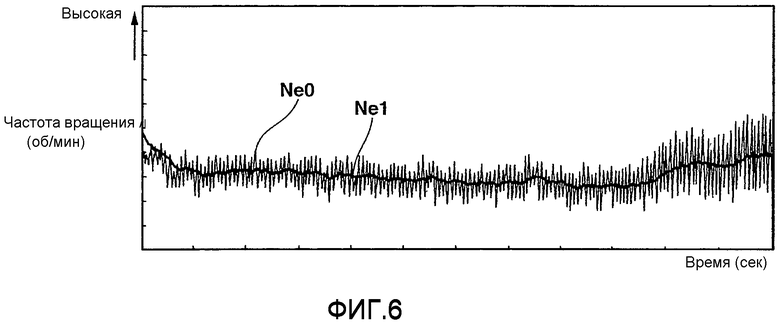
[0017] Фиг. 5 является блок-схемой последовательности операций способа, показывающей последовательность операций управления согласно этому варианту осуществления. Для частоты Ne вращения двигателя, крутящего момента Te двигателя и скорости транспортного средства, которые используются для оценки области риска возникновения вибрации, частота Ne вращения двигателя и крутящего момента Te двигателя имеют большие изменения значения определения или предполагаемого значения (амплитуды вибрации (колебания)). Соответственно, на этапе S11 выполняется операция фильтрации с тем, чтобы сглаживать частоту Ne вращения двигателя и крутящий момент Te двигателя. В частности, как показано на фиг. 6, частота Ne0 вращения двигателя, считываемая посредством датчика угла поворота коленчатого вала, сглаживается посредством известной операции фильтрации (операции смягчения), к примеру операции первой задержки и т.д., так что определяется сглаженная частота Ne1 вращения двигателя. Около области риска возникновения вибрации считываемая частота Ne0 вращения двигателя имеет большое влияние вибрации. Тем не менее, область риска возникновения вибрации оценивается посредством использования сглаженной частоты Ne1 вращения двигателя. Вследствие этого можно подавлять и не допускать ошибочной оценки вследствие изменения (вибрации (колебания)) частоты Ne0 вращения двигателя.
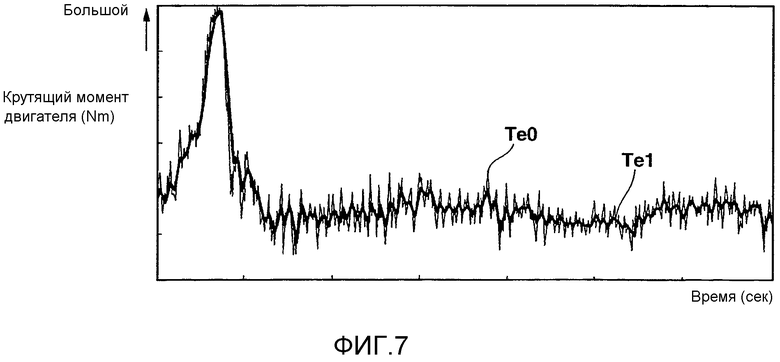
[0018] Аналогично, как показано на фиг. 7, предполагаемый крутящий момент Te0 двигателя сглаживается посредством операции фильтрации (операции смягчения), с тем чтобы определять (получать) сглаженный крутящий момент Te1 двигателя. Область риска возникновения вибрации оценивается посредством использования этого сглаженного крутящего момента Te1 двигателя. Вследствие этого можно подавлять и не допускать ошибочной оценки вследствие изменения (вибрации (колебания)) крутящего момента Te1 двигателя.
[0019] С другой стороны, со ссылкой на фиг. 5, на этапе S12, пороговое значение Ne_Lim вращения оценки областей второй области α2 риска возникновения вибрации вычисляется и задается в соответствии со скоростью транспортного средства, как описано выше. На этапе S13 оценивается то, что частота Ne вращения двигателя равна или меньше вышеописанного порогового значения Ne_Lim частоты вращения оценки областей. На этапе S14 пороговое значение Te_Lim крутящего момента оценки областей для первой области α1 риска возникновения вибрации вычисляется и задается в соответствии с частотой вращения двигателя. На этапе S15 оценивается то, что крутящий момент Te двигателя равен или больше вышеописанного порогового значения Te_Lim крутящего момента оценки областей.
[0020] Когда рабочая точка существует в первой и второй областях α1 и α2 риска возникновения вибрации, оба ответа этапов S13 и S15 являются утвердительными. Затем процесс переходит к этапу S16. Измеряется и накапливается период ΔT1 времени пребывания (нахождения), в течение которого рабочая точка остается в областях α1 и α2 риска возникновения вибрации. В частности, единица времени (интервал вычисления) добавляется к значению таймера, который подсчитывает период ΔT1 времени пребывания, и накопленное значение периода времени пребывания ΔT заменяется на новое.
[0021] Кроме того, когда крутящий момент Te двигателя не равен или больше вышеописанного порогового значения Te_Lim крутящего момента оценки областей либо когда частота Ne вращения двигателя не равна или меньше вышеописанного порогового значения Ne_Lim частоты вращения оценки областей, процесс переходит от этапа S13 или S15 к этапу S23. Период ΔT1 времени пребывания сбрасывается до "0". Процесс возвращается к этапу S11.
[0022] На этапе S17 оценивается то, равен или превышает либо нет период ΔT1 времени пребывания, накопленный и замененный на новый на этапе S16, предварительно определенный период ΔT1_Lim времени оценки вибрации. Этот период ΔT1_Lim времени оценки вибрации соответствует периоду времени, который заранее задается посредством эксперимента и т.д. и после которого пассажир транспортного средства начинает испытывать неестественное ощущение и некомфортное ощущение. Например, этот период ΔT1_Lim времени оценки вибрации задается, например, равным приблизительно 0,5-5 секунд. Кроме того, в этом варианте осуществления период ΔT1_Lim времени оценки вибрации задается равным фиксированному значению. Тем не менее, период ΔT1_Lim времени оценки вибрации может регулироваться в соответствии с уровнем вибрации и т.д.
[0023] Когда период ΔT1 времени пребывания не достигает периода ΔT1_Lim времени оценки вибрации, процесс возвращается к этапу S11. Процесс повторяет операции вышеописанных этапов S11-S16. Когда период ΔT1 времени пребывания достигает периода ΔT1_Lim времени оценки вибрации, процесс переходит к этапу S18. Выполняется управление для избегания области вибрации (для избегания области вибраций), чтобы перемещать рабочую точку в позицию, которая выходит за пределы области риска возникновения вибрации. В этом варианте осуществления выполняется управление в качестве управления для избегания области вибрации, с тем чтобы корректировать передаточное отношение трансмиссии в большую сторону посредством коррекции частоты вращения входного вала бесступенчатой трансмиссии 3 к стороне увеличения, как описано ниже.
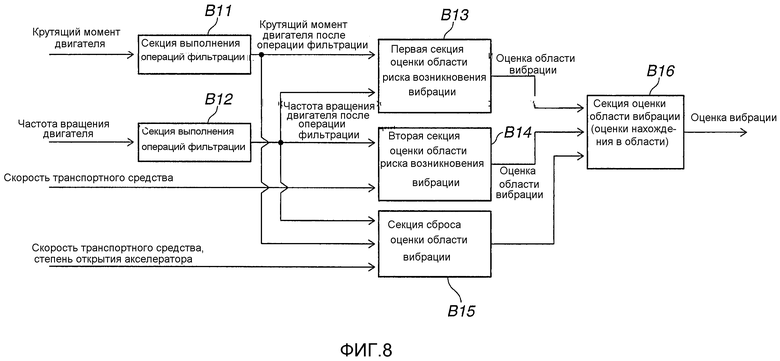
[0024] Эта операция оценки области риска возникновения вибрации и операция управления для избегания области вибрации поясняется со ссылкой на фиг. 8 и фиг. 9. Фиг. 8 является функциональной блок-схемой, показывающей операцию оценки области риска возникновения вибрации. Кроме того, эта операция оценки области риска возникновения вибрации является практически идентичной содержимому, описанному выше на этапах S11-S17 по фиг. 5. Соответственно, приводится краткое пояснение.
[0025] Секция B11 выполнения операций фильтрации для крутящего момента двигателя выполняет операцию фильтрации относительно крутящего момента двигателя и выводит сглаженный крутящий момент двигателя после операции фильтрации. Аналогично, секция B12 выполнения операций фильтрации для частоты вращения двигателя выполняет операцию фильтрации относительно частоты вращения двигателя и выводит сглаженную частоту вращения двигателя после операции фильтрации. Секция B13 оценки первой области риска возникновения вибрации оценивает то, существует или нет рабочая точка, определенная посредством крутящего момента двигателя и частоты вращения двигателя, в первой области α1 риска возникновения вибрации, на основе крутящего момента двигателя после операции фильтрации и частоты вращения двигателя после операции фильтрации. Секция B14 оценки второй области риска возникновения вибрации оценивает то, существует или нет рабочая точка, определенная посредством частоты вращения двигателя и скорости транспортного средства, во второй области α2 риска возникновения вибрации, на основе частоты вращения двигателя после операции фильтрации и скорости транспортного средства. Секция B15 сброса оценки области вибрации оценивает то, сбрасывается или нет вышеописанная операция оценки области риска возникновения вибрации на основе по меньшей мере одного из частоты вращения двигателя после операции фильтрации крутящего момента двигателя после операции фильтрации и скорости транспортного средства. Затем, секция B16 оценки области вибрации (секция оценки нахождения в области) оценивает то, остается или нет рабочая точка в обеих областях α1 и α2, на основе результатов оценки вышеописанных B13-B15 и выводит сигнал оценки вибрации в секцию B21 управления частотой вращения для недопущения вибрации по фиг. 9, когда период ΔT1 времени пребывания достигает предварительно определенного периода ΔT1_Lim времени оценки вибрации.
[0026] Фиг. 9 является функциональной блок-схемой, показывающей один пример управления для избегания области вибрации. Секция B21 управления частотой вращения для недопущения вибрации вычисляет частоту вращения входного вала для недопущения области вибрации на основе скорости транспортного средства и степени открытия акселератора, когда период ΔT1 времени пребывания достигает периода ΔT1_Lim времени оценки вибрации, и вводится оценка вибрации. Например, как показано на фиг. 2(B), заранее задается линия α2′ рабочих режимов для недопущения области вибрации, которая выходит за пределы второй области α2 риска возникновения вибрации к стороне высоких частот вращения на предварительно определенную величину. Частота вращения входного вала для избегания области вибрации задается таким образом, что рабочая точка P0 сдвигается в позицию P0′ на линии α2′ рабочих режимов. В блоке B22, целевая частота вращения для частоты вращения входного вала трансмиссии задается на основе скорости транспортного средства и степени открытия дросселя (или степени открытия акселератора) в отношении предварительно определенной карты управления, с тем чтобы достигать наилучшей экономии топлива. Затем, в блоке B23, большая из частоты вращения входного вала для недопущения вибрации и целевой частоты вращения выбирается и задается в качестве конечной целевой частоты вращения входного вала.
[0027] В этом случае частота вращения входного вала для избегания области вибрации, которая задается посредством секции B21 управления частотой вращения для недопущения вибрации при оценке вибрации, становится значением, скорректированным к стороне увеличения относительно целевой частоты вращения, при которой экономия топлива становится наилучшей (достигается наилучшая экономия топлива), так что частота вращения двигателя перемещается за пределы второй области α2 риска возникновения вибрации к стороне высоких частот вращения. Соответственно, при оценке вибрации частота вращения входного вала трансмиссии для избегания области вибрации, которая является большим значением, задается в качестве конечной целевой частоты вращения входного вала.
[0028] Затем, секция вычисления передаточного отношения трансмиссии B24 вычисляет целевое значение передаточного отношения бесступенчатой трансмиссии 3 на основе конечной целевой частоты вращения входного вала и конечной частоты вращения выходного вала трансмиссии, вычисленных посредством секции 5 управления. Иными словами, передаточное отношение трансмиссии определяется посредством деления целевой частоты вращения входного вала на частоту вращения выходного вала. Как описано выше, при оценке вибрации частота вращения входного вала корректируется к стороне высоких частот вращения. Соответственно, передаточное отношение трансмиссии корректируется к большой стороне (нижней стороне).
[0029] Таким образом, корректируется передаточное отношение трансмиссии. Вследствие этого, как показано на фиг. 10, частота Ne вращения двигателя становится выше порогового значения Ne_Lim частоты вращения и рабочая точка смещается за пределы второй области α2 риска возникновения вибрации. Значение порогового значения Te_Lim крутящего момента оценки областей, которое задается на основе частоты Ne вращения двигателя, становится большим в соответствии с этим увеличением частоты Ne вращения двигателя. Соответственно, крутящий момент Te двигателя смещается за пределы первой области α1 риска возникновения вибрации.
[0030] Фиг. 10 является временной диаграммой при оценке области риска возникновения вибрации и управлении для избегания области вибрации, когда применяется управление согласно этому варианту осуществления. Во время t1 при приведении в движение в то время, когда частота вращения двигателя равна или меньше порогового значения частоты вращения Ne_Lim, когда крутящий момент двигателя становится равным или превышающим пороговое значение крутящего момента Te_Lim в соответствии с увеличением степени открытия акселератора, рабочая точка существует в обеих областях α1 и α2 риска возникновения вибрации. Период ΔT1 времени пребывания начинает измеряться. Когда период ΔT1 времени пребывания достигает периода ΔT1_Lim времени оценки вибрации во время t2, начинается вышеописанное управление для избегания области вибрации, и передаточное отношение трансмиссии корректируется к большой стороне. В это время секция B21 управления частотой вращения для недопущения вибрации по фиг. 9 ограничивает скорость изменения и скорость изменения целевой частоты вращения для избегания области вибрации, например, значением приблизительно в 200 об/мин, с тем чтобы подавлять внезапное изменение крутящего момента двигателя, частоты вращения двигателя и т.д. Следовательно, как показано на фиг. 10, изменение передаточного отношения трансмиссии к большой стороне (нижней стороне) становится пологим. Следовательно, ослабляются изменения частоты вращения двигателя и крутящего момента двигателя. Соответственно, можно подавлять изменение скорости транспортного средства и изменение крутящего момента согласно переключению рабочей точки и подавлять снижение ходовых качеств.
[0031] Кроме того, при управлении для избегания области вибрации, увеличивается частота вращения двигателя и немного снижается крутящий момент двигателя в соответствии с коррекцией передаточного отношения трансмиссии к большой стороне. Тем не менее, изменения скорости транспортного средства и крутящего момента приведения в движение транспортного средства являются очень небольшими. Соответственно, это не вызывает некомфортное ощущение у пассажира. Иными словами, в этом варианте осуществления, при управлении для избегания области вибрации, не выполняется коррекция стороны двигателя и выполняется только коррекция передаточного отношения трансмиссии посредством коррекции целевой частоты вращения входного вала бесступенчатой трансмиссии 3. Таким образом, выполняется простая управляющая логика. Вследствие этого можно подавлять и ослаблять возникновение неестественного ощущения и некомфортного ощущения вследствие вибрации и за счет этого значительно снижать объем операций вычисления и использование запоминающего устройства, требуемое для адаптации.
[0032] С другой стороны, со ссылкой на фиг. 5, на этапе S19 оценивается то, равен или меньше либо нет крутящий момент Te двигателя предварительно определенного порогового значения Te_Lim2 крутящего момента для отмены управления для избегания области вибрации. Когда крутящий момент Te двигателя не равен или меньше порогового значения Te_Lim2 крутящего момента, период ΔT2 времени отмены, описанный ниже, сбрасывается до "0" на этапе S24. Процесс возвращается к этапу S19.
[0033] Когда крутящий момент Te двигателя равен или меньше порогового значения Te_Lim2 крутящего момента, процесс переходит к этапу S20. Измеряется и накапливается период ΔT2 времени отмены от времени, когда крутящий момент Te двигателя становится равным или меньшим порогового значения Te_Lim2 крутящего момента. В частности, единица времени (интервал вычисления) добавляется к значению таймера, которое подсчитывает период ΔT2 времени отмены. Вследствие этого накопленное значение периода ΔT2 времени отмены заменяется на новое.
[0034] На следующем этапе S21 оценивается то, равен или превышает либо нет период ΔT2 времени отмены предварительно определенный период ΔT2_Lim времени оценки отмены. Когда период ΔT2 времени отмены не равен или превышает период ΔT2_Lim времени оценки отмены, процесс возвращается к этапу S19. Когда период ΔT2 времени отмены становится равным или превышающим период ΔT2_Lim времени оценки отмены, процесс переходит к этапу S22, чтобы возвращаться к нормальному управлению для достижения наилучшей экономии топлива. Иными словами, коррекция передаточного отношения трансмиссии к большой стороне прекращается посредством отмены коррекции целевой частоты вращения для избегания области вибрации.
[0035] Фиг. 11 является временной диаграммой при отмене управления для избегания области вибрации, когда применяется этот вариант осуществления. Во время t4, когда крутящий момент Te двигателя становится равным или меньшим порогового значения Te_Lim крутящего момента отмены, начинается измерение периода ΔT2 времени отмены.
[0036] Когда период ΔT2 времени отмены достигает периода ΔT2_Lim времени оценки отмены во время t5, управление для избегания области вибрации отменяется, чтобы возвращаться к нормальному управлению, к рабочей точке, в которой экономия топлива становится наилучшей. В частности, отменяется коррекция целевой частоты вращения входного вала к стороне увеличения. В этом случае, аналогично вышеописанному управлению для избегания области вибрации, темп изменения (скорость изменения) целевой частоты вращения входного вала к нижней стороне ограничивается значением, равным или меньшим предварительно определенного значения (например, приблизительно 200 об/мин). Вследствие этого изменение (снижение) целевой частоты вращения становится пологим. Вследствие этого, как показано на фиг. 11, можно подавлять внезапные изменения передаточного отношения трансмиссии, частоты вращения двигателя и крутящего момента двигателя и за счет этого подавлять ухудшение общей характеристики управляемости вследствие вышеописанного внезапного изменения.
[0037] В вышеописанном варианте осуществления, когда период ΔT1 времени пребывания, в течение которого рабочая точка остается в областях α1 и α2 риска возникновения вибрации, достигает периода ΔT1_Lim времени оценки вибрации, передаточное отношение бесступенчатой трансмиссии 3 изменяется таким образом, что рабочая точка выходит за пределы областей α1, α2 риска возникновения вибрации. Соответственно, можно предотвращать неестественное ощущение и некомфортное ощущение, которые вызываются посредством продолжения вибрации в течение периода ΔT1_Lim времени оценки вибрации или более, и за счет этого повышать качество езды. Кроме того, даже когда рабочая точка находится в областях α1 и α2 риска возникновения вибрации, переключение рабочей точки для недопущения вибрации не выполняется до тех пор, пока период ΔT1 времени пребывания не достигнет периода ΔT1_Lim времени оценки вибрации. Вследствие этого можно предотвращать переключение рабочей точки до того, как образуется вибрация, либо предотвращать переключение на начальной стадии вибрации, которую не ощущает пассажир. Кроме того, продолжается нормальное управление для придания большого значения экономии топлива. Вследствие этого можно повышать экономию топлива и подавлять частоту переключения. Соответственно, можно подавлять снижение общей характеристики управляемости и снижение экономии топлива согласно переключению.
[0038] Кроме того, управление для избегания области вибрации выполняется для того, чтобы корректировать только передаточное отношение бесступенчатой трансмиссии 3 к большой стороне (нижней стороне). Вследствие этого упрощается управляющая логика. Кроме того, можно значительно снижать вычислительную нагрузку и использование запоминающего устройства. В соответствии с коррекцией передаточного отношения трансмиссии к большой стороне образуется небольшое изменение состояния приведения в движение, к примеру увеличение частоты вращения двигателя. Тем не менее, это изменение является небольшим. Оно не оказывает негативное влияние на ощущения при езде.
[0039] В частности, этот вариант осуществления фокусируется на том, что вибрация транспортного средства становится локально большой вследствие влияния резонанса крутильных колебаний системы силовой передачи, когда передаточное отношение трансмиссии находится в пределах предварительно определенного диапазона (см. область α2″ на фиг. 3). Соответственно, скорость транспортного средства, связанная с передаточным отношением трансмиссии, используется в качестве фактора, используемого при оценке области риска возникновения вибрации, в дополнение к частоте вращения двигателя и крутящему моменту двигателя. В частности, в качестве области риска возникновения вибрации предусмотрена вторая область α2 риска возникновения вибрации, определенная посредством скорости транспортного средства и частоты вращения двигателя, т.е. частоты вращения двигателя и передаточного отношения трансмиссии, в дополнение к первой области α1 риска возникновения вибрации на стороне с низкой частотой вращения и высокой нагрузкой двигателя, которая в первую очередь вызывает приглушенный шум, вибрацию днища и т.д. двигателя. Затем, когда рабочая точка находится в обеих областях α1 и α2 риска возникновения вибрации, которые определяются таким способом самым посредством различных факторов, качество езды может ухудшаться посредством наложения двух различных вибраций. Соответственно, в этом случае определяется (оценивается) то, что она находится в области риска возникновения вибрации. Таким образом, область риска возникновения вибрации оценивается с учетом влияния вибрации посредством передаточного отношения трансмиссии (скорости транспортного средства). Вследствие этого можно повышать точность оценки и подавлять снижение экономии топлива посредством необязательного переключения на управление для избегания области вибрации.
[0040] Как описано выше, настоящее изобретение проиллюстрировано на основе конкретного варианта осуществления. Тем не менее, настоящее изобретение не ограничено вышеописанным вариантом осуществления. Настоящее изобретение может включать в себя различные изменения и модификации. Например, в вышеописанном варианте осуществления две области α1 и α2, которые имеют различные факторы, указывающие состояние приведения в движение транспортного средства, используются в качестве области риска возникновения вибрации. Тем не менее, могут использоваться три области или более. Альтернативно, для большего упрощения, используется только одна область риска возникновения вибрации, и может выполняться оценка областей.
[0041] Например, пример, показанный на фиг. 12, использует, в качестве области риска возникновения вибрации область α3 риска возникновения вибрации, которая определяется посредством скорости транспортного средства и движущей силы двигателя. Кроме того, пример, показанный на фиг. 13, использует, в качестве области риска возникновения вибрации, область α4 риска возникновения вибрации, которая определяется посредством скорости транспортного средства и степени открытия дросселя. Обе области α3 и α4 образуются посредством первой граничной линии L1, полученной посредством преобразования первой области α1 риска возникновения вибрации вышеописанного варианта осуществления в качестве движущей силы или степени открытия дросселя, и второй граничной линии L2, полученной посредством преобразования второй области α2 риска возникновения вибрации варианта осуществления в качестве движущей силы или степени открытия дросселя. Соответственно, фактически аналогично варианту осуществления, он представляет область, в которой вибрации двух различных областей приведения в движение перекрываются друг другом. Следовательно, можно получать функции и операции, которые являются практически идентичными функциям и операциям варианта осуществления.
Изобретение относится к управлению транспортным средством. Устройство управления для транспортного средства содержит средство оценки областей, оценивающее, находится ли рабочая точка транспортного средства, которая определяется из множества факторов, представляющих состояние приведения в движение транспортного средства, в предварительно определенной области риска возникновения вибрации, и средство оценки периода времени пребывания рабочей точки в области риска возникновения вибрации. Также устройство содержит средство избегания области вибрации, изменяющее передаточное отношение бесступенчатой трансмиссии таким образом, что рабочая точка выходит за пределы области риска возникновения вибрации, когда период времени пребывания достигает предварительно определенного периода времени. Повышается комфорт при управлении транспортным средством. 8 з.п. ф-лы, 13 ил.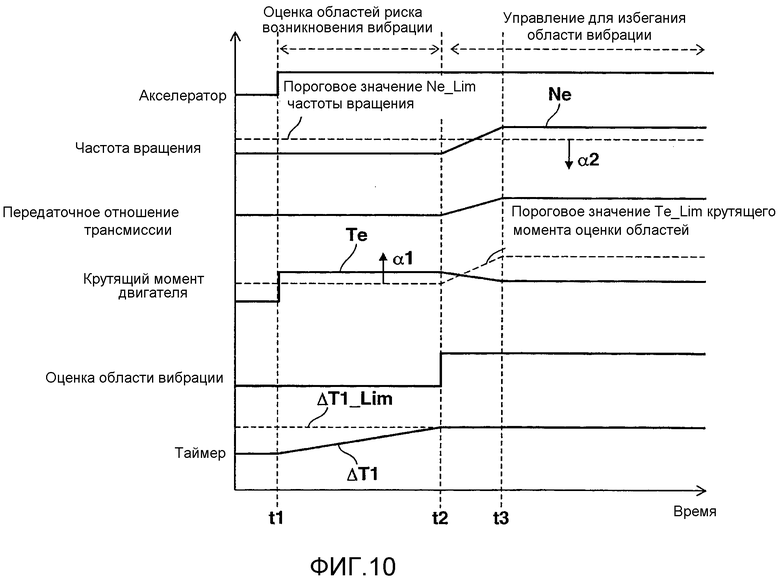
1. Устройство управления для транспортного средства, включающего в себя двигатель и бесступенчатую трансмиссию, выполненную с возможностью бесступенчато переключать выходную мощность двигателя и передавать ее на сторону ведущего колеса, причем упомянутое устройство управления содержит:
- средство оценки областей, выполненное с возможностью оценивать, находится ли или нет рабочая точка транспортного средства, которая определяется из множества факторов, представляющих состояние приведения в движение транспортного средства, в предварительно определенной области риска возникновения вибрации, в которой может быть образована вибрация транспортного средства;
- средство оценки периода времени пребывания, выполненное с возможностью измерять период времени пребывания, в течение которого рабочая точка остается в области риска возникновения вибрации, когда определено то, что рабочая точка находится в области риска возникновения вибрации; и
- средство избегания области вибрации, выполненное с возможностью изменять передаточное отношение бесступенчатой трансмиссии таким образом, что рабочая точка выходит за пределы области риска возникновения вибрации, когда период времени пребывания достигает предварительно определенного периода времени.
2. Устройство управления для транспортного средства по п. 1, в котором средство избегания области вибрации выполнено с возможностью изменять передаточное отношение бесступенчатой трансмиссии в большую сторону таким образом, что рабочая точка выходит за пределы области риска возникновения вибрации, когда период времени пребывания достигает предварительно определенного периода времени.
3. Устройство управления для транспортного средства по п. 1, в котором множество факторов включают в себя, по меньшей мере, скорость транспортного средства.
4. Устройство управления для транспортного средства по п.
1, в котором устройство управления дополнительно включает в себя средство сглаживания, выполненное с возможностью сглаживать, посредством операции фильтрации, частоту вращения двигателя и крутящий момент двигателя, которые используются для оценки области риска возникновения вибрации посредством средства оценки областей.
5. Устройство управления для транспортного средства по п. 1, в котором средство оценки областей выполнено с возможностью оценивать то, что рабочая точка находится в области риска возникновения вибрации, когда крутящий момент двигателя равен или превышает предварительно определенное пороговое значение крутящего момента оценки областей; и устройство управления дополнительно содержит средство отмены, выполненное с возможностью возвращать рабочую точку в исходную рабочую точку, когда крутящий момент двигателя равен или меньше предварительно определенного порогового значения крутящего момента отмены в состоянии, в котором рабочая точка перемещается за пределы области риска возникновения вибрации посредством средства недопущения вибрации.
6. Устройство управления для транспортного средства по п. 5, в котором средство отмены выполнено с возможностью возвращать рабочую точку в исходную рабочую точку, когда состояние, в котором крутящий момент двигателя равен или меньше порогового значения крутящего момента отмены, продолжается в течение предварительно определенного периода времени, в состоянии, в котором рабочая точка перемещается за пределы области риска возникновения вибрации посредством средства избегания области вибрации.
7. Устройство управления для транспортного средства по одному из п.п. 1-6, в котором область риска возникновения вибрации включает в себя первую область риска возникновения вибрации, определенную посредством частоты вращения двигателя и крутящего момента двигателя, и вторую область риска возникновения вибрации, определенную посредством скорости транспортного средства и частоты вращения двигателя; и средство оценки областей выполнено с возможностью оценивать то, что рабочая точка находится в области риска возникновения вибрации только тогда, когда рабочая точка находится как в первой области риска возникновения вибрации, так и во второй области риска возникновения вибрации.
8. Устройство управления для транспортного средства по одному из п.п. 1-6, в котором область риска возникновения вибрации представляет собой область, определенную посредством скорости транспортного средства и движущей силы.
9. Устройство управления для транспортного средства по одному из п.п. 1-6, в котором область риска возникновения вибрации представляет собой область, определенную посредством скорости транспортного средства и степени открытия дросселя.
| JP 2002321549 A, 05.11.2002 | |||
| JP 4272565 A, 29.09.1992 | |||
| JP 2003222230 A, 08.08.2003 | |||
| JP 8277895 A, 22.10.1996. |

