Настоящее изобретение относится к области авиационной техники и может быть использовано для проектирования и производства беспилотной и транспортной авиации.
Конвертопланы имеют неоспоримые преимущества в транспортировании, до конца нереализованные в технических решениях в настоящее время.
Из существующего уровня техники известны разнообразные схемы конвертопланов, например Bell V-22 Osprey, Bell/Aguste BA609, и Hiller XC-142A (конвертоплан Bell-Boeing V22-0sprey - URL http://atikot.my 1.ru/news/2009-07-03-487. Bell/Agusta BA609 - URL http://ru.wikipedia.org/wiki/Bell/Agusta BA609. Beating Gravity - Vought-Hiller-Ryan XC-142A - URL http://www.unrealaircraft.com/gravitv/vhr XC-142A.php), которые являются двухрежимными аппаратами, способные совершать полет как самолет, т.е. двигатели создают тягу, необходимую для движения вперед на заданной высоте с заданной скоростью; при движении крыло создает подъемную силу, за счет преобладания над весом которой аппарат совершает подъем, и как вертолет, у которого тяга двигателей, преодолевая вес, обеспечивает подъем аппарата, а движение вперед обеспечивается либо наклоном несущего винта, либо дополнительно обдуваемым оперением, и которым присущ переход от вертолетного режима к самолетному через поворот двигателей или крыла, с размещенными на нем двигателями.
Известными недостатками этих аппаратов является то, что конструктивно центры масс двигателей не установлены на одной оси с центром масс конвертоплана, что приводит к крайней продольной неустойчивости и плохой управляемости аппарата. Кроме того, в случае с поворотным крылом поворот крыла во время полета на угол 90° приводит к срыву потока на крыле и катастрофическому уменьшению подъемной силы. Следует отметить, что только один конвертоплан находится в серийном производстве, что говорит о несовершенстве ранее предложенных конструктивных схем.
Наиболее близким к заявленному техническому решению является конвертоплан (патент US 6,607,161 В1, опубл. 19.08.2003, US C1. 244/7, МПК B64C 37/00, Convertible aircraft with tilting rotors), включающий фюзеляж, крыло, оперение, двигатели, установленные на концах крыла, шасси. В патенте также представлена схема управления. Переход от вертолетного режима к самолетному возможен поворотом двигателей.
Недостатком данного технического решения является то, что для обеспечения необходимой тяги для подъема конвертоплана установлены вертолетные винты большого диаметра, имеющие большие ограничения по скорости полета в сравнении с самолетными малых диаметров; и вертолетные втулки с автоматами перекоса, необходимые для управления по тангажу на режиме висения, взлета и посадки, что значительно усложняет и утяжеляет конструкцию, так как в основной фазе полета - крейсерском режиме эти втулки с автоматами перекоса являются «мертвым» грузом и сами по себе являются чрезвычайно сложными техническими элементами. При повороте мотогондолы, с размещенным в ней двигателем, крыло попадает в зону обдува пропеллера, что приводит к уменьшению его КПД, и является еще одним недостатком.
Решаемой задачей является создание перспективного летательного аппарата для транспортирования, простой конструкции, сбалансированного на всех режимах полета, способного совершать горизонтальный полет, вертикальные взлет и посадку и зависать на одном месте.
Полезность конвертоплана заключается в возможности взлета/посадки практически на любой подходящей по габаритам площадке, что ведет к сокращению времени транспортирования за счет появления возможности максимально близко доставить целевую нагрузку до пункта назначения.
Технический результат направлен на повышение эффективности конвертоплана. Технический результат достигается тем, что в конвертоплан, содержащий фюзеляж, крыло, двигатели, оперение, шасси, введены пилоны, выполненные с возможностью вращения и расположенные на концах крыла, при этом на пилонах установлено по паре двигателей, причем один двигатель расположен впереди центра масс конвертоплана (ЦМ), а другой двигатель - позади.
Преимуществом, обеспечиваемым приведенной совокупностью признаков, является расположение двигателей на пилонах относительно ЦМ, при котором аппарат эффективно управляется по углу крена и тангажа на нулевых скоростях режимов взлета и посадки.
Сущность изобретения поясняется чертежами, на которых изображено:
на Фиг.1 - представлен вид конвертоплана на взлетном/посадочном режиме,
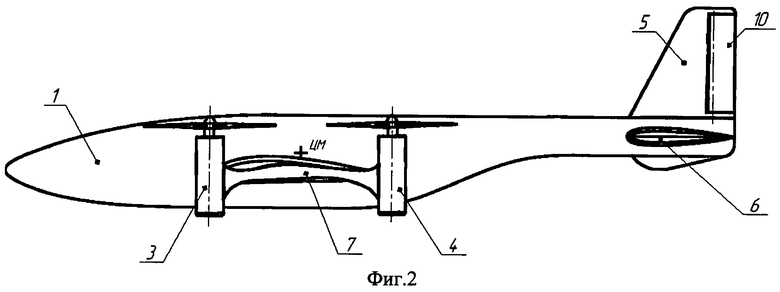
на Фиг.2 - представлен вид конвертоплана на крейсерском режиме,
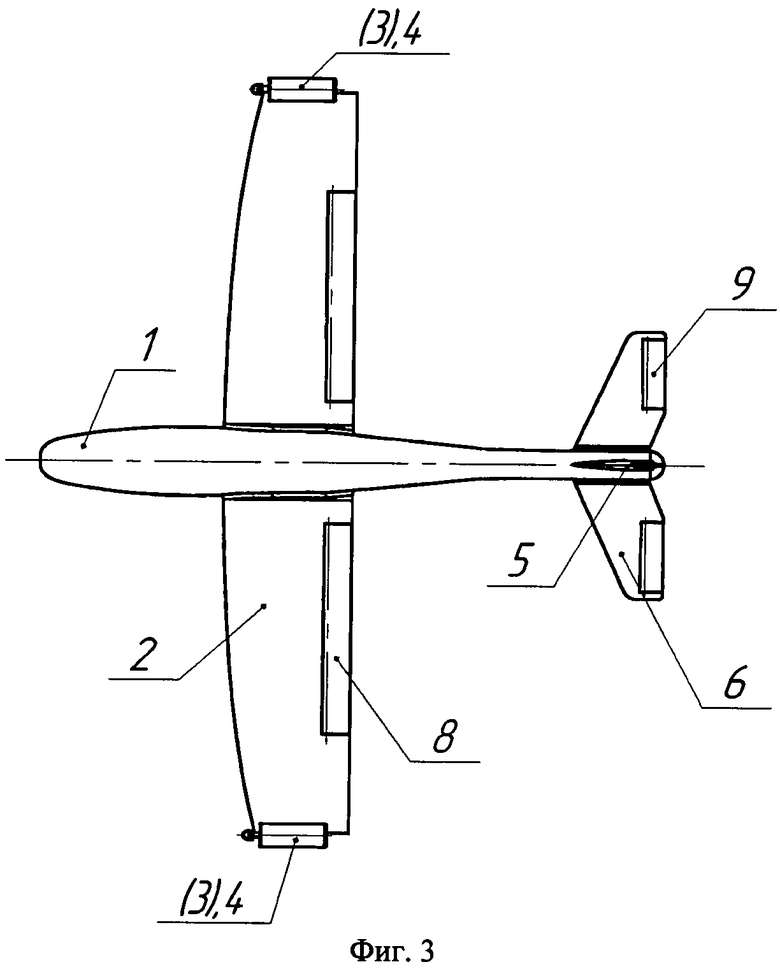
на Фиг.3 - представлен вид конвертоплана сверху,
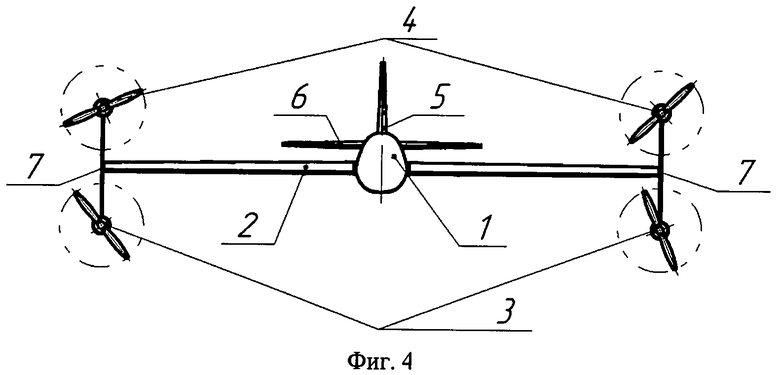
на Фиг.4 - представлен вид конвертоплана от носа,
где:
1 - фюзеляж;
2 - крыло;
3 - передние двигатели;
4 - задние двигатели;
5 - киль;
6 - стабилизатор;
7 - поворотные пилоны;
8 - элероны;
9 - рули высоты;
10 - руль направления.
Предлагаемое изобретение содержит фюзеляж 1, который служит для размещения целевой нагрузки, элементов системы управления и других систем; крыло 2 с элеронами 8 и пилонами 7, на которых размещены двигатели, оперение, которое включает киль 5 с рулем направления 10 и стабилизатор с рулями высоты 9, а также шасси. Двигатели 3 и 4, расположенные на крыле, предназначены для создания подъемной силы и вертикальной скорости на режимах взлета/посадки и для создания тяги и горизонтальной скорости на крейсерском режиме. Элеронами 8, рулями высоты 9 и рулем направления 10 конвертоплан управляется на крейсерском режиме.
Работает устройство следующим образом: на взлете/посадке двигатели 3 и 4 занимают положение, показанное на Фиг.1. При этом расположение двигателей обеспечивает продольную, путевую и поперечную балансировку за счет расположения передних 3 и задних 4 двигателей относительно ЦМ конвертоплана. При достижении высоты крейсерского полета аппарат зависает, и двигатели 3, 4 поворотом пилонов 7 и поворотного киля 5 соответственно занимают положение, показанное на Фиг.2.
В процессе поворота двигателей 3 и 4 происходит увеличение горизонтальной составляющей скорости. Крыло 2 при этом создает подъемную силу, компенсирующую уменьшение вертикальной составляющей тяги винтов.
По мере увеличения горизонтальной составляющей скорости полета и уменьшения вертикальной составляющей тяги винтов управление летательным аппаратом передается самолетным органам управления: рулям высоты 9 и элеронам 8.
Далее после поворота двигателей полет аппарата не отличается от полета самолета.
Для обеспечения устойчивости на переходном режиме от висения к горизонтальному полету управление движителями осуществляется с использованием САУ (системы автоматического управления).
На режиме висения, взлета и посадки управление по крену, рысканью и тангажу осуществляется изменением тяги двигателей 3 и 4. Так по крену, если необходимо опустить правое полукрыло, увеличивается тяга двигателей, расположенных на левом полукрыле, а тяга двигателей на правом полукрыле уменьшается или остается такой же. Или по тангажу, если необходимо опустить нос аппарата, требуется уменьшить тягу передних двигателей 3 и увеличить или оставить такой же тягу задних двигателей 4. В случае рысканья попарно снижается тяга противолежащих винтов с одним направлением вращения и за счет реактивного момента происходит поворот аппарата.
По сравнению с известными аналогами заявляемое техническое решение имеет ряд технико-экономических преимуществ, а именно за счет изменения расстояния от двигателей до крыла, равного длине пилонов, на меньшую величину снизится КПД винтов передних двигателей на переходном режиме из-за попадания крыла в зону обдува пропеллера, и снижение веса аппарата на 7-12% за счет исключения вертолетных втулок с автоматами перекоса. К примеру, вес автоматов перекоса сверхлегкого вертолета общей массой 450 кг составляет 34 кг или 7,6%.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕРТОПЛАН | 2011 |
|
RU2456209C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана) | 2017 |
|
RU2700323C2 |
| Трехвинтовой конвертоплан | 2017 |
|
RU2656957C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |
Изобретение относится к области авиационной техники, в частности к летательным аппаратам с вертикальным взлетом и посадкой. Конвертоплан содержит фюзеляж, крыло, двигатели, оперение, шасси. На концах крыла расположены пилоны, выполненные с возможностью вращения. На пилонах установлены по два двигателя, причем один двигатель расположен впереди центра масс конвертоплана, а другой двигатель-позади. Обеспечивается балансировка летательного аппарата на всех режимах полета. 4 ил. 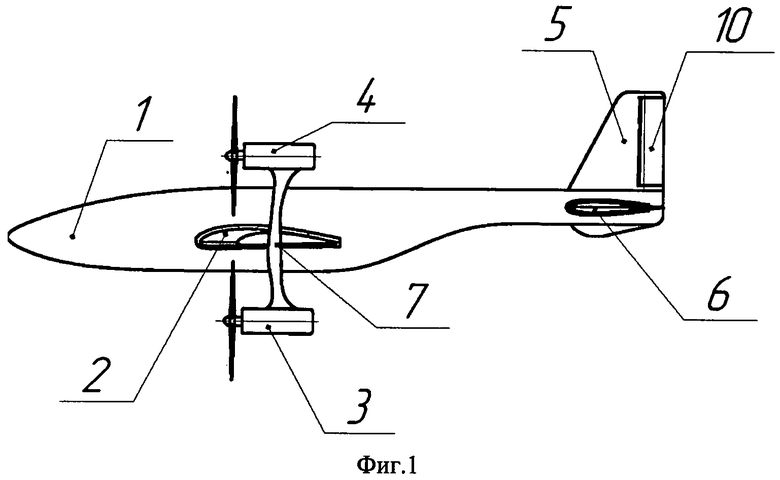
Конвертоплан, содержащий фюзеляж, крыло, двигатели, оперение, шасси, отличающийся тем, что в него введены пилоны, выполненные с возможностью вращения и расположенные на концах крыла, при этом на них установлены по два двигателя, причем один двигатель расположен впереди центра масс конвертоплана, а другой двигатель - позади.
| US 2003094537 A1, 22.05.2003 | |||
| ГИДРОКОНВЕРТОЭКРАНОПЛАН | 2004 |
|
RU2264951C1 |
| Устройство для стерилизации газов | 1980 |
|
SU908361A1 |
| US 6607161 B1, 19.08.2003. | |||

