Предлагаемое изобретение относится к области авиации, самолетной и вертолетной технике, в частности к летательным аппаратам тяжелее воздуха с вертикальным взлетом и посадкой, подъемная сила и тяговая сила в горизонтальном направлении у которых создается посредством наклона воздушного несущего винта относительно фюзеляжа, а именно к конструктивным элементам винтокрылых летательных аппаратов, снабженных приводом изменения положения несущего винта, и может быть использовано в качестве транспортного средства и эффективного средства для ведения боевых действий, для размещения в нем вооружения, транспортировки людей и грузов, использующих аэродинамические подъемно-тянущие движители.
Как известно, недостатком самолета является необходимость наличия значительной взлетно-посадочной полосы для взлета и посадки, что существенно ограничивает его применение. Вертолет был создан, чтобы преодолеть ограничение самолета. Тем не менее, вертолет не получил такого же широкого применения, как самолет: он используется в особых случаях, когда необходимы вертикальные вздет и/или посадка. При этом вертолет летит неэффективно со скоростью и дальностью от ½ до ⅓ соответствующих параметров самолета при в 2-3 раза большем потреблением топлива и эксплуатационных расходов на 1 пассажиро-километр. Вертолет менее безопасен на 1 пассажиро-километр. Цена вертолета примерно в два раза выше по сравнению с сопоставимым самолетом.
Известные летательные аппараты тяжелее воздуха с вертикальным взлетом и посадкой малоэффективны по скорости и дальности полета в связи с тем, что они не обеспечивают соответствующую их тяговую силу для преодоления возрастающего аэродинамического сопротивления на крейсерских режимах полета из-за конструктивных особенностей и устойчивость при движении в горизонтальном направлении. Поэтому в настоящее время актуальной является задача создания высокоскоростного летательного аппарата тяжелее воздуха с вертикальным взлетом и посадкой.
Известен высокоскоростной винтокрылый летательный аппарат с вертикальным взлетом и посадкой [1], выполненный с возможностью отклонения воздушного несущего винта относительно фюзеляжа на 90° из вертикального в горизонтальное положение. Однако известное техническое решение предполагает использование очень большого несущего винта в качестве тяговой силы при движении винтокрылого летательного аппарата в горизонтальном направлении, что является неэффективным вследствие высокого уровня, отрицательно воздействующего на него крутящего момента относительно фюзеляжа, который должен быть компенсирован крылом летательного аппарата, что, в свою очередь, требует повышенного внимания пилота и снижает эффективность крыла летательного аппарата. Для использования в качестве горизонтального движителя ротора (несущего винта), имеющего возможность наклона, его лопасти по всей длине должны иметь большую аэродинамическую крутку, что делает его менее эффективным в режиме вертикального взлета и посадки по сравнению с обычным несущим винтом вертолета в случае отказа двигателя. Слишком большой размер несущего винта при использовании в качестве движителя производит и испытывает большое сопротивление в крейсерском режиме винтокрылого летательного аппарата при его полете в горизонтальном направлении, ограничивая тем самым эффективную крейсерскую скоростью около 300 миль/час (около 480 км/час).
Кроме этого, механизм отклонения несущего винта винтокрылого летательного аппарата занимает пространство в центральной части пассажирского салона, снижая тем самым его полезную площадь и комфортность салона для пассажиров в целом.
Известен винтокрылый летательный аппарат с вертикальным взлетом и посадкой [2], содержащий один отклоняемый ротор (несущий винт), прикрепленный к удлиненной силовой гондоле двигателя, включающей совместный и циклический механизм отклонения несущего винта и передающее устройство. Силовая гондола шарнирно прикреплена к основанию, подвижно установленному на паре щелевых направляющих балок, прикрепленных на верхней части крыши фюзеляжа. Направляющие балки установлены в продольном направлении от передней части летательного аппарата за его центром тяжести с возможностью перемещения силовой гондолы от передней части к центральной секции при преобразовании из режима горизонтального крейсерского полета в режим вертикального взлета и посадки. В режиме горизонтального крейсерского полета силовая гондола расположена горизонтально в передней части летательного аппарата с достаточным зазором между несущим винтом в режиме его отклонения на 90° из вертикального в горизонтальное положение и верхней части передней секции фюзеляжа. При переходе в режим вертикального взлета и посадки телескопический привод используется для поворота силовой гондолы вертикально, а кабельная система-лебедка используется для перемещения силовой гондолы с основанием назад до остановки в центре тяжести летательного аппарата, и наоборот, что позволяет силовой гондоле перемещаться взад и вперед на значительное расстояние, необходимое для правильной балансировки вертикального подъема по мере того, как силовая гондола поворачивается на 90° во время перехода из режима вертикального взлета и посадки на крейсерский режим полета. Один поршневой двигатель или один, или два турбореактивных двигателя крепятся к задней части летательного аппарата относительно центра его тяжести, имеют приводные валы, обеспечивающие возможность захвата и передачи на соответствующей приемный вал силовой гондолы с тем, чтобы обеспечить связь двигателя с отклоняемым несущим винтом. Двигатель связан с несущим винтом, обеспечивающим движение в горизонтальном направлении, или при использовании турбореактивного двигателя его реактивная тяга обеспечивает движение в горизонтальном направлении. Небольшой рулевой винт или вентилятор в кольцевом обтекателе в хвосте летательного аппарата механически соединен с двигателем посредством приводного вала для обеспечения тяги в необходимую сторону для компенсации крутящего момент несущего винта. В режиме горизонтального крейсерского полета отклоняемому несущему винту у летательного аппарата обеспечивается возможность вращения с минимальной скоростью, необходимой для поддержания целостности лопастей несущего винта.
Аналогичный принцип движения может быть применен к винтокрылым летательным аппаратам с вертикальным взлетом и посадкой, содержащим более одного отклоняемого несущего винта, что потенциально может увеличить скорость, дальность и надежность современного летательного аппарата, - с установленными на левой и правой консоли крыла отклоняемыми несущими винтами. Консоли крыла с большим удлинением с обеих сторон фюзеляжа обеспечивают высокоэффективный подъем во время крейсерского режима полета с очень небольшим индуктивным сопротивлением. Стандартные горизонтальные и вертикальные хвостовые несущие поверхности используются для обеспечения устойчивости летательного аппарата в крейсерском режиме полета.
Недостатками известного винтокрылого летательного аппарата с вертикальным взлетом и посадкой являются следующие.
1. Наклон отклоняемого несущего винта из вертикального в горизонтальное положение на 90° при переходе из режима вертикального взлета в режим горизонтального крейсерского полета создает настолько сильный крутящий момент, вызываемый вращением несущего винта, что стандартные горизонтальные и вертикальные хвостовые несущие поверхности, используемые в известном техническом решении, не позволяют обеспечить необходимую устойчивость летательного аппарата в крейсерском режиме полета. В данной схеме уравновешивающий момент возможно создать только при помощи крыла путем установки углов атаки к набегающему потоку консолей крыла с противоположными углами. Как следствие, подъемная сила на одной консоли будет направлена вверх, а на другой консоли - вниз. Суммарная сила для создания подъемной силы для полета летательного аппарата будет расположена сбоку от его оси, а не над центром тяжести, что создаст момент на вращение летательного аппарата по оси. При использовании подобной схемы выполнение полетов невозможно.
2. Необходимость наклона отклоняемого несущего винта из вертикального в горизонтальное положение на 90° при переходе из режима вертикального взлета в режим горизонтального крейсерского полета обеспечивается наличием в известном техническом решении кабельной системы-лебедки и направляющих балок, установленных в продольном направлении от передней части летательного аппарата за его центр тяжести и используемых для перемещения силовой гондолы с основанием от передней части центральной секции летательного аппарата назад до остановки в центре тяжести летательного аппарата, и наоборот, что позволяет силовой гондоле перемещаться взад и вперед на значительное расстояние, необходимое для правильной балансировки вертикального подъема по мере того, как силовая гондола поворачивается на 90° во время перехода из режима вертикального взлета и посадки на крейсерский режим полета для исключения возможности соприкосновения с передней частью фюзеляжа летательного аппарата. Все это значительно утяжеляет летательный аппарат и усложняет его конструкцию.
3. В качестве привода и управления несущими винтами используются двигатели внутреннего сгорания или реактивные двигатели, при этом механический привод является сложным по своей конструкции, что приводит к увеличению веса летательного аппарата.
4. Сильно удлиненное крыло по обеим сторонам фюзеляжа делает конструкцию летательного аппарата громоздкой.
5. Возможность отклонения несущего винта только в одно положение (на 90°) при его переходе из вертикального в горизонтальное положение сужает область варьирования летательным аппаратом своей скоростью в режиме горизонтального крейсерского полета, что бывает необходимо, например, в случае изменения рельефа местности, по которой пролетает летательный аппарат, или в случае различных целей полета, например, в обзорных целях при достижении определенного пункта полета, или при перемещении груза, требующего учет полетной скорости летательного аппарата.
Наиболее близким техническим решением (прототипом) является летательный аппарат с укороченным или вертикальным взлетом [3], содержащий фюзеляж, установленный между модулями кабин таким образом, чтобы сохранять центр тяжести летательного аппарата между модулями кабины, хвостовую стрелу (балку), соединенную с фюзеляжем летательного аппарата и включающую, по крайней мере, один горизонтальный стабилизатор для управления наклоном и направлением летательного аппарата, раму летательного аппарата, имеющую поворотное крепление для установки гондолы и роторного блока, по крайней мере одну носовую стрелу (балку), соединенную с фюзеляжем или рамой летательного аппарата, включающую, по крайней мере, одно горизонтальное зафиксированное или подвижное крыло, съемные или складные крылья, прикрепляемые к любой стороне фюзеляжа или раме летательного аппарата для обеспечения дополнительной подъемной силы летательного аппарата, при этом съемные или складные крылья могут содержать элероны для обеспечения контроля за отклонением от курса летательного аппарата, по крайней мере, один ротор (несущий винт), гондолу, содержащую, по крайней мере, один двигатель, соединенный с, по крайней мере, одним ротором (несущим винтом), установленным с возможностью вращения в центре тяжести летательного аппарата, при этом гондола установлена по центру с возможностью поворота по дуге от первого положения, когда вращающиеся лопасти, по крайней мере, одного ротора (несущего винта) горизонтальны при укороченном или вертикальном взлете и вертикальном полете летательного аппарата, во второе положение, когда вращающиеся лопасти, по крайней мере, одного ротора (несущего винта) вертикальны для горизонтального полета летательного аппарата, причем центр тяжести летательного аппарата остается тем же, когда гондола поворачивается из первого во второе положение, причем в первом положении, по крайней мере, один ротор расположен горизонтально в положении выше гондолы, а во втором положении, по крайней мере, один ротор расположен вертикально перед гондолой, хвостовой ротор (рулевой винт) для контроля отклонения от курса летательного аппарата, установленный смежно с гондолой и парой модулей кабины и обеспечивающий обратную тягу для выборочного поворачивания летательного аппарата около вертикальной оси, по крайней мере, один двигатель, выполненный в виде турбинного двигателя.
Ротор (несущий винт) может быть выполнен в виде наклонного ротора (несущего винта), включающего установленную по центру гондолу двигателя, обеспечивающего поворот наклонного ротора, и роторный блок, установленный в центре тяжести летательного аппарата, включающие, по крайней мере, один двигатель, обеспечивающий поворот наклонного ротора, и, по крайней мере, одну пару противовращающихся роторов, управляемых, по крайней мере, одним двигателем и обеспечивающих устранение эффекта вращающего момента, при этом гондола двигателя, обеспечивающего поворот наклонного ротора, и роторный блок при наклоне не нарушают существенно центра тяжести летательного аппарата, причем радиус роторного блока меньше, чем расстояние от роторного блока до земли.
Недостатками известного винтокрылого летательного аппарата с укороченным или вертикальным взлетом являются следующие.
1. Наклон отклоняемого несущего винта из вертикального в горизонтальное положение при переходе из режима вертикального взлета в режим горизонтального крейсерского полета создает настолько сильный крутящий момент, вызываемый вращением несущего винта, что стандартные горизонтальные и вертикальные хвостовые несущие поверхности, используемые в известном техническом решении, не позволяют обеспечить необходимую устойчивость летательного аппарата в крейсерском режиме полета. В данной схеме уравновешивающий момент возможно создать только при помощи крыла путем установки углов атаки к набегающему потоку консолей крыла с противоположными углами. Как следствие, подъемная сила на одной консоли будет направлена вверх, а на другой консоли - вниз. Суммарная сила для создания подъемной силы для полета летательного аппарата будет расположена сбоку от его оси, а не над центром тяжести, что создаст момент на вращение летательного аппарата по оси. При использовании подобной схемы выполнение полетов невозможно.
2. Необходимость наклона отклоняемого несущего винта из вертикального в горизонтальное положение при переходе из режима вертикального взлета в режим горизонтального крейсерского полета обеспечивается возможностью перемещения гондолы взад и вперед по дуге на значительное расстояние, необходимое для перехода из режима вертикального взлета и посадки на крейсерский режим полета. Все это значительно утяжеляет летательный аппарат и усложняет его конструкцию.
3. В качестве привода и управления наклонным ротором (несущим винтом) используется турбинный двигатель, при этом роторный блок является сложным по своей конструкции, что приводит к увеличению веса летательного аппарата.
4. Сильно удлиненное крыло по обеим сторонам фюзеляжа делает конструкцию летательного аппарата громоздкой.
5. Возможность отклонения несущего винта только в одно положение при его переходе из вертикального в горизонтальное положение сужает область варьирования летательным аппаратом своей скоростью в режиме горизонтального крейсерского полета, что бывает необходимо, например, в случае изменения рельефа местности, по которой пролетает летательный аппарат, или в случае различных целей полета, например, в обзорных целях при достижении определенного пункта полета, или при перемещении груза, требующего учет полетной скорости летательного аппарата.
Новым достигаемым техническим результатом предполагаемого изобретения является повышение эффективности винтокрылого летательного аппарата с вертикальным взлетом посредством применения механизма отклонения несущего винта, обеспечивающего возможность увеличения вектора тяги несущего винта в горизонтальном направлении (пропульсивной горизонтальной силы) вследствие регулирования наклона несущего винта на заданный угол.
Новый технический результат достигается тем, что в винтокрылом летательном аппарате с вертикальным взлетом, содержащем фюзеляж, хвост, соединенный с фюзеляжем летательного аппарата и включающий, по крайней мере, один горизонтальный стабилизатор, крылья с элеронами, рулевой винт, отклоняемую совместно с вращающимся валом наклонного ротора гондолу, содержащую, по крайней мере, один двигатель, соединенный с наклонным ротором и обеспечивающий его поворот, наклонный ротор с вращающимся валом, по крайней мере, часть которого установлена в отклоняемой гондоле с возможностью вращения при перемещении его вращающихся лопастей из положения при вертикальных взлете и полете летального аппарата в положение при его горизонтальном полете и механизм отклонения наклонного ротора в виде механического привода, в отличие от прототипа, что механический привод выполнен с возможностью отклонения наклонного ротора на заданный угол (+70°>α>-45°) при его переходе из вертикального в наклонное положение.
Крыло с элеронами может быть выполнено малой площади.
По крайней мере, один двигатель может быть выполнен в виде электродвигателя.
Рулевой винт может быть выполнен, по крайней мере, с двумя лопастями и с возможностью отключения в режиме горизонтального полета и размещен в канале воздуховода.
В летательный аппарат дополнительно может быть введено хвостовое оперение с установленным на нем под углом к набегающему воздушному потоку вертикальным килем, создающим компенсирующий крутящий момент по отношению к закрепленному на вале наклонному ротору.
В летательный аппарат дополнительно может быть введен автомат перекоса с системой его управления, установленный в отклоняемой гондоле.
Механический привод может быть выполнен с возможностью обеспечения достаточного зазора между гондолой и плоскостью вращения лопастей несущего ротора в отклоненном положении несущего ротора и верхней частью фюзеляжа.
На фиг. 1-6 представлены принципиальные схемы высокоскоростного винтокрылого летательного аппарата с вертикальным взлетом и посадкой.
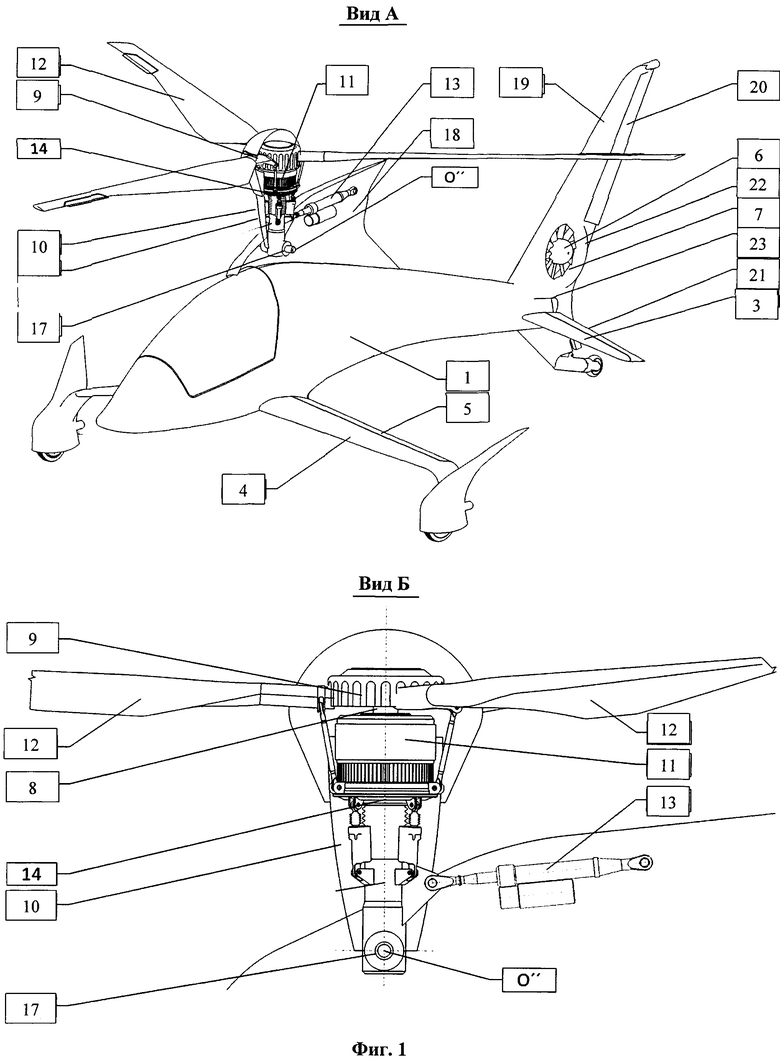
Винтокрылый летательный аппарат с вертикальным взлетом содержит фюзеляж 1, хвост 2, соединенный с фюзеляжем 1 летательного аппарата и включающий, по крайней мере, один горизонтальный стабилизатор 3 для управления наклоном и направлением движения летательного аппарата, крылья малой площади 4 с элеронами 5 для обеспечения контроля за отклонением от направления движения летательного аппарата, рулевой винт 6 для контроля отклонения от направления полета летательного аппарата посредством обеспечения обратной тяги для выборочного поворота летательного аппарата около вертикальной оси, размещенный в канале воздуховода 7 и выполненный, по крайней мере, с двумя лопастями с возможностью поворота летательного аппарата в вертолетном режиме его полета посредством увеличения или уменьшения тяги рулевого винта 6, отклоняемую совместно с вращающимся валом 8 наклонного ротора 9 гондолу 10, содержащую, по крайней мере, один двигатель 11, соединенный с наклонным ротором 9 и обеспечивающий его поворот, наклонный ротор 9 с вращающимся валом 8, по крайней мере, часть которого установлена в отклоняемой гондоле 10 с возможностью вращения при перемещении вращающихся лопастей 12 наклонного ротора 9 из положения при вертикальных взлете и полете летального аппарата в положение при его горизонтальном полете, механический привод 13, обеспечивающий возможность увеличения вектора тяги наклонного ротора 9 в горизонтальном направлении посредством наклона вала 8 наклонного ротора 9 на заданный угол и установленный в отклоняемой гондоле 10 автомат перекоса 14 с системой управления автоматом перекоса (фиг. 1, вид А - вид летательного аппарата сбоку, вид Б - вид спереди внутренней части гондолы 10 и наклонного ротора 9 летательного аппарата).
Двигатель 11 представляет собой силовой агрегат в виде электрического мотора, поршневого двигателя или газотурбинного двигателя и предназначен для передачи механической энергии через трансмиссию (при ее наличии) на наклонный ротор (несущий винт) 9 и рулевой винт (хвостовой ротор) 6. Двигатель 11 может быть размещен непосредственно на вращающемся вале 8 наклонного ротора (несущего винта) 9 в отклоняемой гондоле 10.
Преимуществом использования в качестве двигателя 11 электрического мотора по сравнению с поршневым или турбореактивным двигателями с механическими приводами являются малый габаритный размер, меньшая относительная масса, отсутствие трансмиссии при непосредственном размещении в потребителе энергии, в данном случае - в наклонном роторе (несущем винте) 9. В качестве электрического мотора может использоваться любой электрический двигатель необходимой мощности.
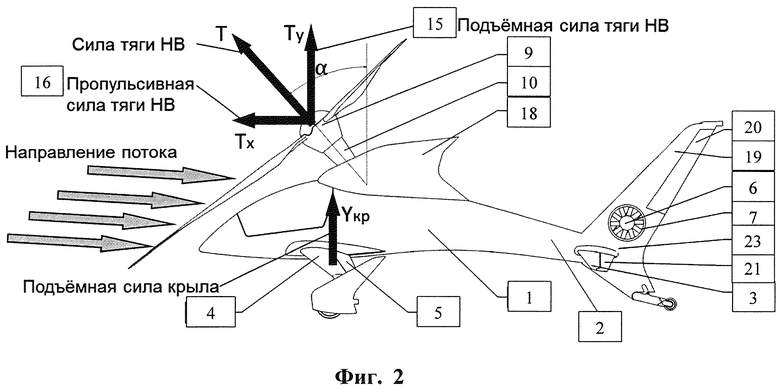
Наклонный ротор (несущий винт) 9 предназначен для создания подъемной 15 и пропульсивной силы 16 (фиг. 2) для полета высокоскоростного винтокрылого летательного аппарата с вертикальным взлетом и посадкой. В качестве наклонного ротора (несущего винта) 9 может быть использован аэродинамический винт, по крайней мере, с двумя лопастями 12, закрепленный на втулке вращающегося вала 8 наклонного ротора (несущего винта) 9 и работающий в вертолетном и самолетном режимах полета, что требует специальных расчетов его основных характеристик в каждом конкретном случае.
Отклоняемая гондола 10 содержит автомат перекоса 14 с системой управления автоматом перекоса 14, трансмиссию (при необходимости) наклонного ротора (несущего винта) 9, и, по крайней мере, часть вращающегося отклоняемого вала 8 наклонного ротора (несущего винта) 9, размещенного внутри неподвижного отклоняемого вала, установленного с возможностью наклона вокруг центра вращения О″ (фиг. 1, вид Б) посредством приспособления наклона 17 (фиг. 1, вид А), например кронштейна. Приспособление наклона 17 закреплено на верхней части фюзеляжа 1, при этом центр вращения О″ может располагаться на верхней части фюзеляжа 1, ниже верхней части фюзеляжа 1 или над верхней частью фюзеляжа 1. Положение центра Вращения О″ рассчитывается индивидуально для соответствующего типа винтокрылого летательного аппарата с вертикальным взлетом и посадкой.
Отклоняемая гондола 10 также может содержать (как один из вариантов) двигатель 11. Отклоняемая гондола 10 предназначена для обеспечения сохранности автомата перекоса 14 с системой управления автоматом перекоса 14, трансмиссии (при ее наличии) наклонного ротора (несущего винта) 9, вращающегося отклоняемого вала 8 (находящегося в отклоняемой гондоле 10) наклонного ротора (несущего винта) 9 и двигателя 11 (при его размещении в отклоняемой гондоле 10).
Компактная сборка автомата перекоса 14 с системой управления автоматом перекоса 14, трансмиссии (при ее наличии) наклонного ротора (несущего винта) 9, вращающегося вала 8, двигателя 11 (в случае размещения в отклоняемой гондоле 10) производится в виде так называемой колонки.
При наклоне вращающегося вала 8 наклонного ротора (несущего винта) 9 посредством механического привода 13 отклоняемая гондола 10 вместе с ее содержимым перемещается вместе с вращающимся валом 8 наклонного ротора (несущего винта) 9. В качестве отклоняемой гондолы 10 может быть использована любая обтекаемая конструкция, выполненная из легкого прочного материала, например алюминия или полимерного материала, для уменьшения аэродинамического сопротивления в полете.
Механический привод 13 наклонного ротора (несущего винта) 9 предназначен для изменения положения (наклона относительного вертикального положения) наклонного ротора (несущего винта) 9. В качестве механического привода 13 наклонного ротора (несущего винта) 9 могут быть использованы обычные покупные механические приводы, приводимые в действие при помощи электрической или гидравлической, или пневматической систем. Механический привод 13 наклонного ротора (несущего винта) 9 может быть размещен в дополнительной мотогондоле 18 (фиг. 1), установленной на фюзеляже 1. В дополнительной мотогондоле 18 также может быть размещен электрический аккумулятор, обеспечивающий электропитание механического привода 13, или второй двигатель (при необходимости).
Дополнительная мотогондола 18 предназначена для обеспечения сохранности механического привода 13 наклонного ротора (несущего винта) 9, электрического аккумулятора, обеспечивающего электропитание механического привода 13, или второго двигателя (при необходимости) и других систем управления, которые могут размещаться в мотогондоле 18.
Автомат перекоса 14 с системой управления автоматом перекоса 14 предназначен для изменения циклического шага лопасти 12, меняющего вектор тяги наклонного ротора (несущего винта) 9 и общего шага лопасти 12 для увеличения или уменьшения тяги наклонного ротора (несущего винта) 9. Автомат перекоса 14 обеспечивает управление вертикальным перемещением винтокрылого летательного аппарата с вертикальным взлетом и посадкой, а также его наклоном по крену и тангажу; для этого автомат перекоса 14 периодически изменяет угол установки каждой лопасти 12 наклонного ротора (несущего винта) 9 в зависимости от того, где лопасть 12 оказывается в определенный момент времени в ходе вращения наклонного ротора (несущего винта) 9 как целого. В качестве автомата перекоса 14 используют рассчитываемый индивидуально автомат перекоса под соответствующий наклонный ротор (несущий винт) 9.
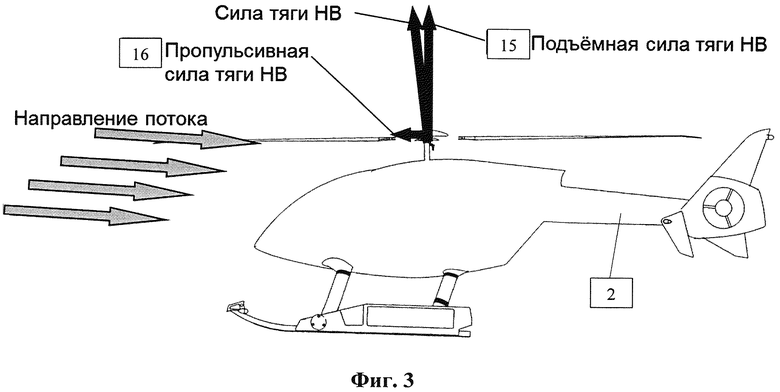
Преимуществом использования наклонного ротора (несущего винта) 9 с механическим приводом 13 является увеличение вектора пропульсивной силы 16 (фиг. 2) по сравнению с классическими вертолетами для достижения высоких крейсерских скоростей полета (фиг. 3).
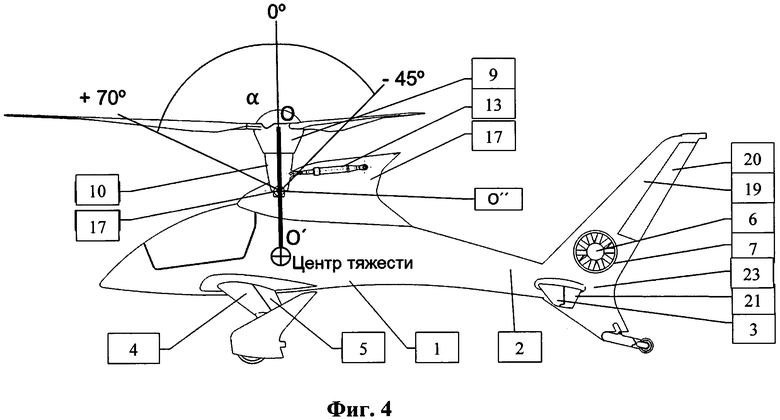
Отклонение наклонного ротора (несущего винта) 9 на заданный угол возможно в диапазоне углов (+70°>α>-45°) при его переходе из вертикального в наклонное положение относительно нулевой (α=0°) оси (О - О′). Нулевой (α=0°) осью (О-О′) отсчета в предлагаемом техническом решении принимается линия, проходящая от центра вращения лопастей 12 наклонного ротора (несущего винта) 9 через центр тяжести винтокрылого летательного аппарата с вертикальным взлетом и посадкой (фиг. 4). При этом отклонение наклонного ротора (несущего винта) 9 на заданный угол в диапазоне углов (+70°>α>-45°) при его переходе из вертикального в наклонное положение относительно нулевой (α=0°) оси (О-О′) возможно как в вертикальной плоскости относительно уровня океана, так и под углами к данной вертикальной плоскости.
Ограничением при отклонении наклонного ротора (несущего винта) 9 в диапазоне углов (+70°>α>-45°) при его переходе из вертикального в наклонное положение является наличие достаточного зазора между плоскостью вращения лопастей 12 наклонного ротора (несущего винта) 9 в его отклоненном положении и верхней частью фюзеляжа 1, что зависит от используемой в конкретном летательном аппарате конструкции верхней части фюзеляжа 1.
При угле отклонения наклонного ротора (несущего винта) 9 свыше+70° и - 45° относительно нулевой (α=0°) оси (О - О′), проходящей через центр вращения лопастей 12 наклонного ротора (несущего винта) 9 и центр тяжести, даже при наличии достаточного зазора между плоскостью вращения лопастей 12 наклонного ротора (несущего винта) 9 в его отклоненном положении и верхней частью фюзеляжа 1 предлагаемый винтокрылый летательный аппарат не сможет летать по причине сложности создания компенсирующего момента от наклонного ротора (несущего винта) 9.
Фюзеляж 1 предназначен для размещения в нем агрегатов силовой установки, топлива, системы управления и аппаратура для обеспечения полета. На верхней части фюзеляжа 1 установлена отклоняемая гондола 10. В качестве фюзеляжа 1 может быть использована его традиционная конструкция с особенной его верхней частью, формирующей достаточный зазор между плоскостью вращения лопастей 12 наклонного ротора (несущего винта) 9 в его отклоненном положении.
Вертикальное хвостовое «оперение» винтокрылого летательного аппарата с вертикальным взлетом и посадкой состоит из вертикального киля 19 и руля направления 20. Конструктивно вертикальный киль 19 выполнен с необходимым для создания боковой силы удлинением и установлен под заданным углом к набегающему потоку для создания боковой подъемной силы, компенсирующей крутящий момент от наклонного ротора (несущего винта) 9 в режиме горизонтального крейсерского полета. Угол установки вертикального киля 19 к набегающему воздушному потоку зависит от его длины и рабочей площади и определяется каждый раз в зависимости от аэродинамических характеристик летательного аппарата.
Руль направления 20 предназначен для поворота высокоскоростного винтокрылого летательного аппарата с вертикальным взлетом и посадкой в горизонтальной плоскости в режиме горизонтального крейсерского полета.
Преимуществом использования вертикального киля 19 с рулем направления 20 является создание достаточной боковой силы для компенсации крутящего момента, создаваемого наклонным ротором (несущим винтом) 9, и возможности отключения рулевого винта 6 в режиме горизонтального полета винтокрылого летательного аппарата для снижения в нем энергопотребления.
В качестве вертикального киля 19 с рулем направления 20 может быть использовано расположенное вертикально крыло.
Горизонтальное «оперение» высокоскоростного винтокрылого летательного аппарата с вертикальным взлетом и посадкой состоит из горизонтального стабилизатора 3 и руля высоты 21 и предназначено для балансировки и изменения положения по тангажу в режиме горизонтального полета. В качестве горизонтального стабилизатора 3 с рулем высоты 21 может быть использовано крыло малого удлинения.
Рулевой винт 6 предназначен для компенсации крутящего момента, создаваемого наклонным ротором (несущим винтом) 9, и поворота винтокрылого летательного аппарата с вертикальным взлетом и посадкой в вертолетном режиме полета при помощи увеличения или уменьшения тяги рулевого винта 6. Рулевой винт 6 размещен в кольцевом обтекателе 22 в хвосте 23 летательного аппарата в канале воздуховода 7 для создания меньшего сопротивления в режиме горизонтального полета. В режиме горизонтального крейсерского полета рулевой винт 6 (при необходимости) может быть отключен. В качестве рулевого винта 6 может быть использован, например, винт, по крайней мере, с двумя лопастями, закрепленными на втулке вращения рулевого винта 6, и механизмом изменения угла атаки лопастей рулевого винта 6 для создания аэродинамической силы тяги в противоположных направлениях вдоль оси вращения рулевого винта 6.
Преимуществом использования рулевого винта 6 в канале воздуховода 7 является малый его размер по сравнению с обычными винтами и, как следствие, создание меньшего аэродинамического сопротивления в горизонтальном крейсерском полете.
Канал воздуховода 7 представляет собой сконфигурированный цилиндрический или конический каналы и предназначен для создания дополнительной тяги и повышения КПД рулевого винта 6. В качестве воздуховода 7 может быть использована полусферическая кольцевая поверхность с расположенным в центре канала рулевым винтом 6.
Крыло малой площади 4 предназначено для создания дополнительной подъемной силы в самолетном режиме полета и изменения положения винтокрылого летательного аппарата с вертикальным взлетом и посадкой по крену при помощи элеронов 5. В качестве крыла малой площади 4 с элеронами 5 может быть использовано, например, типовое самолетное крыло с расположенными на нем элеронами 5.
Конструктивно крыло 4 выполнено с площадью, необходимой для создания дополнительной подъемной силы. Площадь крыла 4 зависит от взлетной массы летательного аппарата и определяется каждый раз в зависимости от аэродинамических характеристик летательного аппарата.
Преимуществом использования крыла малой площади 4 с элеронами 5 является создание дополнительной аэродинамической подъемной силы в самолетном крейсерском режиме полета и меньшее аэродинамическое сопротивление при вертикальной обдувке от несущего винта.
Высокоскоростной винтокрылый летательный аппарат с вертикальным взлетом и посадкой работает следующим образом.
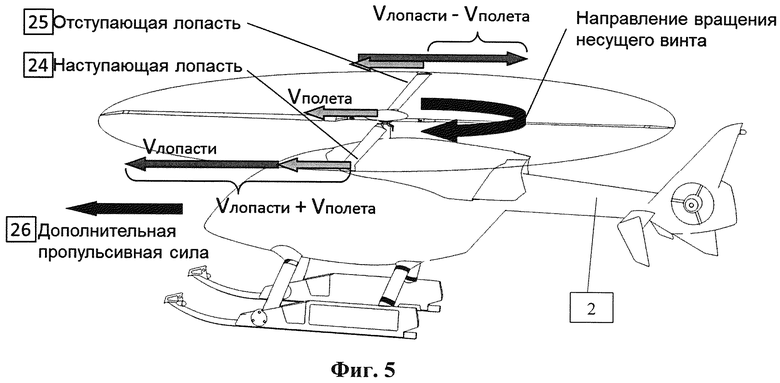
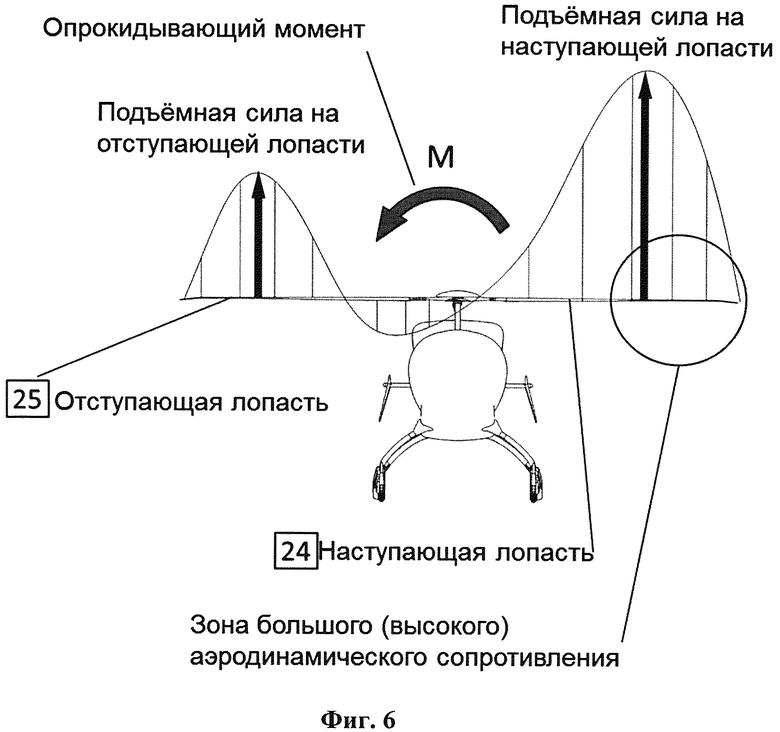
В классической схеме вертолета (фиг. 5) расположенный горизонтально наклонный ротор (несущий винт) 9 в горизонтальном полете подвержен неравномерной аэродинамической нагрузке. При вращении наклонного ротора (несущего винта) 9 противолежащие лопасти, в частности наступающая лопасть 24 (в положении по направлению скорости полета), обтекается суммарной скоростью потока, состоящей из скорости вращения и скорости набегающего потока воздуха, а отступающая лопасть 25 обтекается потоком воздуха за вычетом скорости набегающего полета из скорости вращения лопасти. В случае суммирования скоростей, наступающая лопасть 24 создает большую подъемную силу 15 и высокое аэродинамическое сопротивление (фиг. 6), а в случае положения лопасти 12 при вычитании скоростей обтекания подъемная сила 15 и сопротивление уменьшаются, что приводит к возникновению момента, опрокидывающего винтокрылый летательный аппарат набок.
При подобном положении наклонного ротора (несущего винта) 9 для увеличения скорости горизонтального полета (фиг. 5) и преодоления аэродинамического сопротивления требуется дополнительная пропульсивная сила 26, приводящая к возрастанию потребляемой мощности двигателя 11.
В предложенной схеме в вертолетном режиме полета наклонный ротор (несущий винт) 9 располагается практически горизонтально (фиг. 3) (как и в классической схеме вертолета). Для перехода в режим горизонтального крейсерского полета (самолетный режим) (фиг. 2) положение вращающегося вала 8 вертолетного наклонного ротора (несущего винта) 9 изменяется при помощи механического привода 13 наклонного ротора (несущего винта) 9 на заданный угол (+70°>α>-45°).
В наклонном положении наклонный ротор (несущий винт) 9 находится в косой (а не в плоской) обдувке (фиг. 2), что приводит к уменьшению индуктивного сопротивления, снижению сопротивления на наступающей лопасти 24 (фиг. 5), существенному увеличению пропульсивной силы 16 (фиг. 2), для достижения больших горизонтальных скоростей по сравнению с аналогичным вертолетом, что приводит к существенной экономии потребной мощности двигателя 11 (фиг. 1).
На основании вышеизложенного новый достигаемый технический результат предполагаемого изобретения обеспечивается следующими техническими преимуществами.
1. Повышение не менее чем в 1,5 раза эффективности высокоскоростного винтокрылого летательного аппарата с вертикальным взлетом и посадкой в крейсерском режиме полета посредством применения механического привода 13 для отклонения наклонного ротора (несущего винта) 9 на заданный угол, дополнительных горизонтальных и вертикальных несущих поверхностей, обеспечивающих дополнительную подъемную силу и необходимую устойчивость летательного аппарата в крейсерском режиме полета.
2. Обеспечение необходимой устойчивости и управляемости винтокрылого летательного аппарата в крейсерском режиме полета за счет дополнительных несущих поверхностей (крыла малой площади 4).
3. Упрощение конструкции винтокрылого летательного аппарата с вертикальным взлетом и посадкой за счет упрощения конструкции гондолы и в случае замены сложных по своей конструкции механических приводов на электроприводы.
4. Снижение габаритов винтокрылого летательного аппарата с вертикальным взлетом и посадкой за счет замены крыльев (по прототипу) по обеим сторонам фюзеляжа 1 на короткое крыло малой площади 4.
5. Расширение функциональных возможностей винтокрылого летательного аппарата с вертикальным взлетом и посадкой, в частности область варьирования летательным аппаратом своей скоростью в режиме горизонтального крейсерского полета, что бывает необходимо, например, в случае изменения рельефа местности, по которой пролетает летательный аппарат, или в случае различных целей полета, например, в обзорных целях при достижении определенного пункта полета, или при перемещении груза, требующего учет полетной скорости летательного аппарата, за счет возможности отклонения наклонного ротора (несущего винта) 9 посредством механического привода 15 на заданный угол (+70°>α>-45°) при его переходе из вертикального в наклонное положение.
Экспериментальный прототип винтокрылого летательного аппарата с вертикальным взлетом и посадкой, изготовленный в ООО «Электро-Вертолетные системы», после проведения лабораторных и стендовых испытаний доказал принципиальную возможность реализации задач по созданию высокоскоростного летательного аппарата тяжелее воздуха с вертикальным взлетом и посадкой, устойчивого при движении в горизонтальном направлении.
Используемые источники информации
1. Патент США №6382556, 2002, МКИ В64С 29/00, В64С 27/28, классификация США 244/6.
2. Патент США №20050045762, 2005, МКИ В64С 27/26, В64С 27/28, классификация США 244/7.00R.
3. Патент США №7143973 В2, 05.12.2006, МКИ В64С 27/22.
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с вертикальным взлетом и посадкой. Винтокрылый летательный аппарат с вертикальным взлетом содержит фюзеляж, хвост, соединенный с фюзеляжем летательного аппарата и включающий горизонтальный стабилизатор, крылья с элеронами, рулевой винт, отклоняемую совместно с вращающимся валом наклонного ротора гондолу. Гондола содержит двигатель, соединенный с наклонным ротором и обеспечивающий его поворот, наклонный ротор с вращающимся валом, часть которого установлена в отклоняемой гондоле с возможностью вращения при перемещении его вращающихся лопастей из положения при вертикальных взлете и полете летального аппарата в положение при его горизонтальном полете и механизм отклонения наклонного ротора в виде механического привода. Механический привод выполнен с возможностью отклонения наклонного ротора на заданный угол (+70°>α>-45°) при его переходе из вертикального в наклонное положение. Достигается повышение эффективности летательного аппарата с вертикальным взлетом и посадкой. 6 з.п. ф-лы. 6 ил.
1. Винтокрылый летательный аппарат с вертикальным взлетом, содержащий фюзеляж, хвост, соединенный с фюзеляжем летательного аппарата и включающий по крайней мере один горизонтальный стабилизатор, крылья с элеронами, рулевой винт, отклоняемую совместно с вращающимся валом наклонного ротора гондолу, содержащую по крайней мере один двигатель, соединенный с наклонным ротором и обеспечивающий его поворот, наклонный ротор с вращающимся валом, по крайней мере, часть которого установлена в отклоняемой гондоле с возможностью вращения при перемещении его вращающихся лопастей из положения при вертикальных взлете и полете летального аппарата в положение при его горизонтальном полете и механизм отклонения наклонного ротора в виде механического привода, отличающийся тем, что механический привод выполнен с возможностью отклонения наклонного ротора на заданный угол (+70°>α>-45°) при его переходе из вертикального в наклонное положение.
2. Летательный аппарат по п. 1, отличающийся тем, что крыло с элеронами выполнено малой площади.
3. Летательный аппарат по п. 1, отличающийся тем, что по крайней мере один двигатель выполнен в виде электродвигателя.
4. Летательный аппарат по п. 1, отличающийся тем, что рулевой винт выполнен по крайней мере с двумя лопастями и с возможностью отключения в режиме горизонтального полета и размещен в канале воздуховода.
5. Летательный аппарат по п. 1, отличающийся тем, что в него дополнительно введено хвостовое оперение с установленным на нем под углом к набегающему воздушному потоку вертикальным килем, создающим компенсирующий крутящий момент по отношению к закрепленному на валу наклонному ротору.
6. Летательный аппарат по п. 1, отличающийся тем, что в него дополнительно введен автомат перекоса с системой его управления, установленный в отклоняемой гондоле.
7. Летательный аппарат по п. 1, отличающийся тем, что механический привод выполнен с возможностью обеспечения достаточного зазора между гондолой и плоскостью вращения лопастей несущего ротора в отклоненном положении несущего ротора и верхней частью фюзеляжа.
| US 7143973 B2, 05.12.2006 | |||
| ВЕРТОЛЕТ И СПОСОБ УПРАВЛЕНИЯ ОДНОВИНТОВЫМ ВЕРТОЛЕТОМ | 2002 |
|
RU2238221C2 |
| ВЕРТОЛЕТ С ОДНИМ НЕСУЩИМ ВИНТОМ И СПОСОБ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЕТА | 1993 |
|
RU2086476C1 |
| US 20110036955 A1, 17.02.2011 | |||
| US 6382556 B1, 07.05.2002 | |||

