Изобретение относится к конвертируемым дозвуковым самолетам, имеющим складное высокорасположенное крыло с цельно-поворотными консолями и их турбореактивными и электрическими двигателями, размещенными соответственно на крыле между в более чем двух винтокольцевых движителях и внутри последних, создающих их воздушными винтами (ВВ) подъемную и маршевую распределенную или реактивную тягу в вертолетной и самолетной полетной конфигурации с низкой или высокой тепловой, звуковой сигнатурой в режиме полета с вращательными или невращательными ВВ при работающих соответствующих их двигателях.
Известен проект самолета вертикального взлета и посадки (ВВП) модели D0.231 компании Domier (ФРГ) с его стреловидным крылом, на консолях которого смонтированы гондолы с маршевыми и подъемными турбореактивными двухконтурными двигателями (ТРДД), создающими горизонтальную и вертикальную тягу, содержит Т-образное оперение на конце фюзеляжа и убирающееся трехопорное колесное шасси.
Признаки, совпадающие - силовая установка имеет два маршевых ТРДД компании Rolls Royce тягой по 10850 кгс, установленных под крылом в гондолах, обеспечивают горизонтальную тяговооруженность КпЮДб на крейсерских режимах полета с взлетным его весом 59 тонн. Подъемные ТРДД компании Rolls Royce тягой по 5935 кгс, установленные по два в носовой и хвостовой части фюзеляжа и по четыре в гондолах на крыле с их воздухозаборниками и открывающимися створками, содержат сопла с дефлекторами, отклоняющими поток их газов на 15° вперед или назад, обеспечивают вертикальную тяговооруженность Квт=1,2 на режимах ВВП и зависания.
Причины, препятствующие поставленной задаче: первая - это то, что размещение подъемных ТРДД, снабженных соплами с дефлекторами, изменяющими вектор реактивной их тяги, предопределяет наличие сложной системы управления отклонением вперед или назад потока струи газов ТРДД, что усложняет конструкцию. Вторая - это то, что сопла подъемных ТРДД на консолях крыла с увеличением угла его атаки на переходных режимах полета создают опасность появления на крыле срыва потока, что снижает надежность. Третья - это то, что для выполнения ВВП и зависания имеется двойная раздельная система создания вертикальной тяги и поперечно-продольной управляемости (подъемные ТРДД имеют сопла с дефлекторами), что неизбежно ведет к утяжелению конструкции, но и уменьшению весовой отдачи, так как при вертикальном/горизонтальном его полете маршевые/подъемные ТРДД, увеличивая паразитную массу, бесполезны. Что ограничивает возможность повышения дальности полета более 900 км при крейсерской скорости 900 км/ч и вместимости 100 человек.
Известен (см. https://cont.ws/@Drozd/1725375) беспилотный летательный аппарат (БПЛА) "Cormorant/CityHawk" компании "Tactical Robotics" (Израиль), выполненный по схеме несущего фюзеляжа с газотурбинной/водородно-электрической силовой установкой, приводящей передний и задний подъемные вентиляторы и в двух задних кольцевых каналах боковые маршевые винты, обеспечивающие при транспортировке людей и грузов соответствующие режимы полета, автоматически огибая рельеф.
Признаки, совпадающие - надрельефный БПЛА "Cormorant" выполнен в виде несущего фюзеляжа, имеющего вес пустого 771 кг, длину 6,8 м, ширину 3,5 м, высоту 2,3 м и турбовальный двигатель (ТВаД) Turbomeca Arriel 2С2 (мощностью 944 л.с.), приводящий передний и задний подъемные вентиляторы (D=T,8 м), но и два боковых винта в кольцевых каналах, обеспечивающих на высоте 3600 м и дальность полета 200 км при скорости 120/185 км/ч и соответствующем расходе топлива 132/163 кг/час.
Причины, препятствующие поставленной задаче: первая - это то, что двигатель размещен в корпусе между подъемными вентиляторами, имеющими Т-образную трансмиссию с длиной валов 7,4 м, но и верхние и нижние управляемые створки, отклоняющие их воздушный поток для осуществления изменения балансировки по тангажу, крену и курсу, что усложняет управляемость и безопасность полета в случае отказа одного ТВаД. Вторая - это то, что размещение боковых кабин, подъемных вентиляторов и ТВАД в его несущем корпусе предопределяет большую площадь миделя фюзеляжа, что создает дополнительное лобовое сопротивление. Третья - это то, что для выполнения взлета/посадки и горизонтального полета имеется двойная система создания вертикальной и маршевой тяги, при этом маршевые винты при вертикальном взлете/посадке, увеличивая паразитную массу, бесполезны, что ведет к утяжелению конструкции, а отсутствие крыльев предопределяет постоянную работу подъемных вентиляторов, что весьма уменьшает, увеличивая расход топлива, весовую отдачу.
Наиболее близким к предлагаемому изобретению является конвертоплан (Патент US 9475585 В2, 25.10.2016) компании "Boeing" (США), имеющим крыло с подкрыльными двигателями силовой установки (СУ) и от них отдельно на концах крыла поворотные гондолы с винтами, фюзеляж, бортовую систему управления (БСУ), хвостовое Т-образное оперение и трехопорное колесное шасси.
Признаки, совпадающие - наличие поворотных гондол с винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, систему трансмиссии с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности двух пар ТРДД между винтами.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на концах крыла поворотных гондол с редукторами и винтами, имеющими автоматы перекосов с управлением их общего, циклического и дифференциального изменения их шага, что предопределяет конструктивно сложное крыло с валами трансмиссии и сложной системой поворота винтов, что усложняет конструкцию и уменьшает надежность, но и весьма увеличивает габаритные размеры по ширине с вращающимися винтами. Вторая - это то, что при висении поток от винтов, обдувая консоли крыла и создавая значительную общую потерю (≈23%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что силовая установка включает ТРДД избыточной мощности, используемой при выполнении ВВП на 50%, что весьма снижает весовую отдачу, особенно, при отказе одного из них, а расположение на концах крыла поворотных винтов диаметром 19 м будет иметь ограничения в достижении крейсерской скорости только до 518,6 км/ч. Четвертая - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота гондол, взлетать и садиться «по-самолетному», как обычный самолет, этот конвертоплан не может.
Предлагаемым изобретением решается задача в указанном выше известном авиакомплексе с конвертопланом компании "Boeing" упрощение конструкции узлов поворота крыла с винтами, улучшение продольной управляемости при вертикальном взлете-посадке, повышение скорости, дальности полета и транспортной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного конвертоплана компании "Boeing", наиболее близкого к нему, являются наличие того, что он выполнен с возможностью выполнения вертикального и короткого взлета-посадки (ВВП и КВП) соответственно с вертолетной площадки и взлетно-посадочной полосы (ВПП), содержит по меньшей мере одно крыло, синхронно отклоняемые в вертикальной плоскости цельно-поворотные консоли (ЦПК) которого имеют с автозапуском более чем один турбореактивный двухконтурный и электрический двигатели (ТРДД и ЭД), последние из них с воздушными винтами (ВВ) нерегулируемого или регулируемого их шага размещены в более чем двух профилированных над- и подкрыльном кольцевых каналах (НКК и ПКК), интегрированных между собой и, например, с высокорасположенным крылом (ВРК), имеющим закрылки и внешние флапероны, причем вдоль средней линии каждой ЦПК и между каждой пары НКК и ПКК установлена крыльевая мотогондола (КМГ) с лобовым воздухозаборником ее малогабаритного ТРДД, имеющего прямоточное реактивное прямоугольное сопло (РПС) с термопоглощающим покрытием и V-образной в плане задней кромкой, вынесенной за соответствующую кромку ЦПК, при этом гибридная СУ (ГСУ) содержит на ВРК разнесенные реактивные и винтокольцевые движители (РРД и ВКД), имеющие соответственно ТРДД и ЭД, последние из которых приводят в НКК и ПКК их ВВ, например, нерегулируемого шага, создающие взлетную тягу, регулируемую изменением оборотов их ЭД, действующую вдоль продольной оси каждого ВКД совместно с подъемной тягой РРД, составляющей 25-26% от общей взлетной тяги ГСУ, и маршевую реактивную или распределенную тягу для выполнения ВВП, зависания или скрытного, огибая рельеф, горизонтального полета как реактивного и электрического самолета при подлете к цели с высокой и ее атаке с низкой тепловой, звуковой сигнатурой в режиме полета соответственно с невращательными и вращательными ВВ при работающих соответствующих их двигателях, причем каждый НКК и ПКК имеет обратное сужение с размещением его V-образных на виде сбоку передней и задней кромок к продольной оси НКК и ПКК с образованием трапециевидной его формы на виде спереди/сверху при ВВП/горизонтальном полете соответственно, интегрирован с ВРК, узлы поворота его ЦПК, связанные синхронизирующим валом, выполнены без механического либо с механическим приводом либо в их комбинации и снабжены возможностью изменения вектора горизонтальной тяги ВВ в их НКК и ПКК на вертикальную и обратно посредством большей тяги нижних ВВ или верхних ВВ либо следящего механического привода, которые обеспечивают соответственно их поворот вверх или вниз при скорости поворота 4,5-6,0 град/сек на требуемый угол 90° и жесткой в конечном положении одновременной фиксации ЦПК с НКК и ПКК, при этом каждый ЭД-генератор (ЭДГ) и его ВВ интегрирован с удобообтекаемой гондолой (УОГ), смонтированной на профилированных Х-образных ребрах жесткости (ХРЖ) в НКК и ПКК, обеспечивает в ГСУ для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения ЭДГ от авторотации его ВВ при косой обдувке в НКК и ПКК от набегающего воздушного потока при горизонтальном полете ДДС с маршевой тягой, создаваемой его ТРДД, причем при горизонтальном и вертикальном полете ДДС передние кромки трапециевидных НКК и ПКК, размещенных на ЦПК бок о бок так, что передние их кромки совмещены или параллельны соответствующей кромке ВРК, при этом выполнение ВВП, зависания и автоматической вертикальной посадки гибридного ДДС создается, например, двумя ТРДД совместно с восемью равновеликими ВВ, встречно вращающимися как в односторонних НКК и ПКК на каждой ЦПК, так и в противолежащих НКК и ПКК на каждой ЦПК в ВРК, образующими из трапециевидных НКК и ПКК совместно с ЦПК и трапециевидными их концевыми частями как пилообразные переднюю и заднюю кромки ВРК, так и восьмивинтовую поперечную схему (ВВПС), создающую противоположные крутящие моменты для управления, обеспечивает изменение высоты полета ДС за счет уменьшения/увеличения оборотов всех ЭДГ с их ВВ при постоянной тяге ТРДД, а увеличением/уменьшением оборотов на передних/задних или левых/правых ее ВВ, вращающихся в противоположных направлениях, сохраняя общий момент вращения, обеспечивается балансировка по тангажу или крену соответственно в их внутренних или внешних НКК и ПКК на ВРК, а изменение балансировки по курсу в ВВПС-Х8 осуществляется за счет увеличения/уменьшения оборотов ВВ, вращающихся соответственно по часовой/против часовой стрелки в диагонально расположенных сдвоенных НКК и ПКК на ВРК, причем в ГСУ при крейсерском полете ДС после остановки тормозами в каждом НКК и ПКК его ЭДГ с его тянущим или толкающим четырехлопастным ВВ, лопасти которого, размещаясь в радиальных прорезях за носком и вдоль средних линий ХРЖ или за ними в НКК и ПКК, жестко фиксируются или автоматически назад по полету синхронно складываются вдоль продольной оси его УОГ без выноса их за габариты последнего соответственно, что обеспечивает преобразование полетной его конфигурации с электрического в турбовентиляторный ДС, но и обратно с обеспечением повышения экологической и топливно-потребительской практичности, при этом для выполнения ВВП/КВП с нормальным/максимальным взлетным весом ДС имеются его как ГСУ, создающая подъемную/наклонную тягу при одновременном отклонении ЦПК и их фиксации с НКК и ПКК и их ВВ с КМГ и их ТРДД под углом 90740° средней линии ЦПК к горизонтали, так и хвостовое оперение прямой или обратной V-образности (ОПУ или OOV) с рулевыми поверхностями, но и убирающиеся или неубирающиеся колеса упомянутого трехопорного шасси, смонтированные в отсеках фюзеляжа или удобообтекаемых обтекателях (УОО), закрепленных с амортизационными стойками самоориентирующихся небольших колес на законцовках цельно-поворотного переднего подфюзеляжного киля (ПФК) и хвостового OOV соответственно.
Кроме того, уменьшение стояночной площади палубного ДС на вертолетной площадке или в ангаре корабля обеспечивается тем, что упомянутое ВРК при горизонтальном расположении его упомянутых ЦПК с их НКК и ПКК снабжено узлами поворота, смонтированными в корневых частях ВРК для складывания в горизонтальной плоскости вперед по полету так, что ЦПК и их НКК и ПКК размещаются перед соответствующими бортами фюзеляжа, имеющего сверху носовую выдвижную топливную штангу системы дозаправки в воздухе и трапециевидную планформу, причем в многоразовом ДС упомянутое его ВРК с ЦПК, передние кромки которых размещены параллельно задним, имеют упомянутую разнонаправленную стреловидность, например, χ=±12° или χ=±23°, что обеспечивает уменьшение требуемой маршевой тяговоуроженности (КМТ) в √1,5 раза, которая достигается упомянутыми ЭДГ/ТРДД в их адаптивной ГСУ и программируется на крейсерскую тяговоуроженность: первого или второго уровня, что позволяет достичь на высоте полета 5000 м/10000 м крейсерской или максимальной скорости полета Маха (М)=0,23/М=0,75 или М=0,27/М=0,79, но и существенно до 22%-30% увеличение топливной эффективности или скорости и дальности полета для скоростного или дозвукового крейсерского полета соответственно, при этом оптимизация продольного смещения упомянутых КМГ на упомянутых ЦПК в ВРК достигается определением каждого минимума соотношения для асимметричной конструкции малозаметного ДС, например, для конструкции со смещением упомянутых КМГ с передней их кромкой V-образной планформы, локальный минимум соотношения коэффициентов сопротивления у которых возникает на расстоянии смещения, которое составляет приблизительно 19,9% от максимального смещения и которое соответствует примеру реализации со смещением КМГ в упомянутых левой и правой ЦПК и диапазоне расстояний смещения, который, обеспечивая два или более чем два положения, минимизирует волновое сопротивление для заданной конструкции ВРК с пилообразными его кромками, причем головной ДС, который полностью оцифрован и включает использование лазерного канала связи, что позволит его упомянутую БСУ оснастить обтекателями магнитометра либо квантового гравиградиометра и двухчастотной бортовой радиолокационной станцией (РЛС) с ее активной фазированной антенной решеткой (АФАР) и оптико-электронной станции (ОЭС), установленные соответственно на конце хвостовой балки и в носовой части и снизу нее упомянутого фюзеляжа для обеспечения на безопасных для него расстояниях геолокации малозаметной цели в составе авиагруппы, применяемой совместно с другими авиагруппами или роем, способными обмениваться информацией и передавать целеуказание на ряд других удаленно-ведомых ДС (УВДС), не использующие свои РЛС, но и обеспечивать управление своими оружейными нагрузками и по лазерному каналу связи других возвращаемых ДС с наведением на цель, например, их зенитных или противотанковых управляемых ракет (ЗУР или ПТУР) типа «Игла-С» или «Корнет» либо авиационных противолодочных торпед типа АПР-ЗМ или корректируемых авиабомб (КАБ) типа «Загон-2», установленных, например, в их ТПК, закрепленных на их подфюзеляжных пилонах либо в бомбоотсеке с автоматическими его створками на катапультных пусковых устройствах соответственно, при этом планер ДС, защищенный от соленого морского воздуха, выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой его обшивке упомянутого фюзеляжа и его ВРК с ЦПК и их НКК и ПКК, но и его, например, ПФК с OOV, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно, упомянутой БСУ, обеспечивающей управление УВДС с кабины пилотом рядом летящего самолета-носителя или командного пункта средства базирования или автоматическое выполнение надрельефного полета либо над поверхностью воды посредством системы цифровой корреляции с рельефом местности, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет в носовом обтекателе фюзеляжа, но и установленную снизу него цифровую тепловизионную камеру, обеспечивающую корреляцию отображения объекта для фиксации местности перед ним, но и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать.
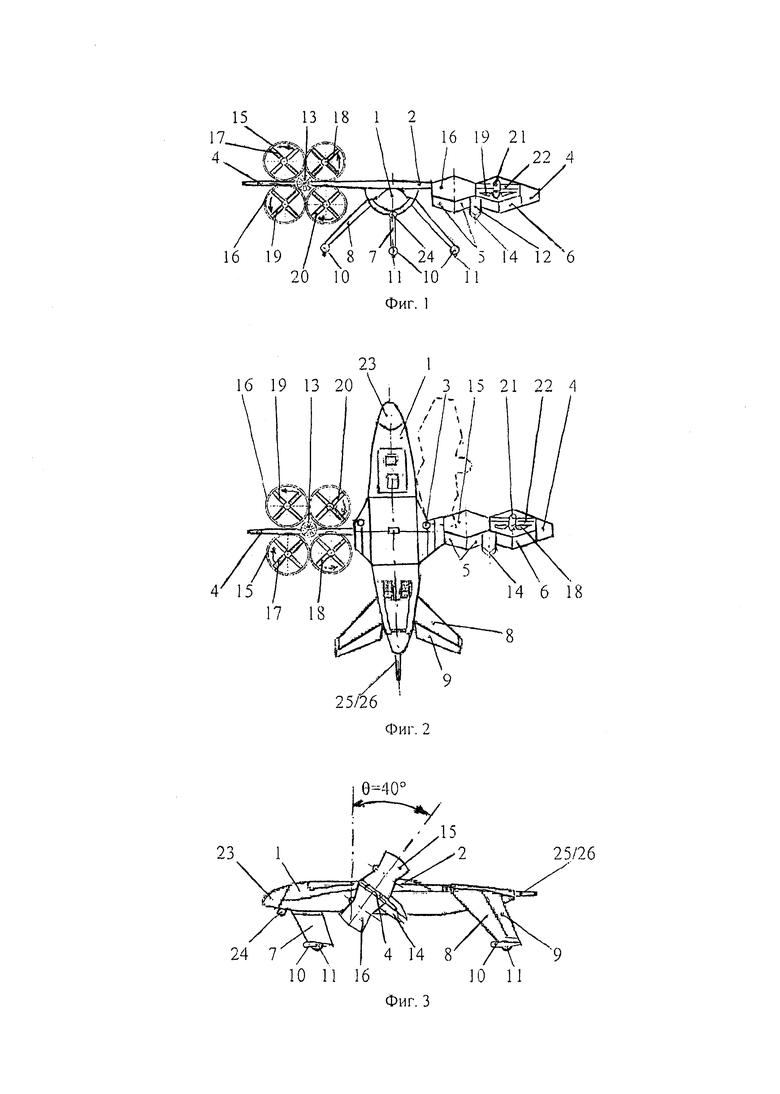
Предлагаемое изобретение конвертируемого ДС с ВРК и его ЦПК с КМГ, которые с их ТРДД смонтированы между НКК и ПКК с их ЭДГ, приводящими ВВ в ВВПС-Х8, имеет ПФК и хвостовое OVO, иллюстрируется на общих видах фиг. 1/2-3:
фиг. 1/2 в конфигурации внеаэродромного ДС с ВРК, разнонаправленной стреловидностью χ=±23°, на правой/левой ЦПК сдвоенные ее НКК и ПКК с ВВ создают маршевую/подъемную тягу, показаны условно на режимах крейсерского полета/ВВП;
фиг. 3 в конфигурации аэродромного ДС КВП с ВРК и его ЦПК с НКК и ПКК, создающими наклонно-маршевую тягу при отклонении ЦПК вниз под углом 40°.
В неаэродромный ДС представлен на фиг. 1/2-3 с фюзеляжем 1, имеющим ВРК 2 с его узлами поворота 3 и ЦПК 4 с их закрылками 5 и флаперонами 6, передний ПФК 7 и хвостовое OVO 8 с его рулями высоты 9, которые имеют У00 10 с их колесами 11. Каждая КМГ 12 с лобовым воздухозаборником 13 имеет ТРДД с его РПС 14, смонтирована вдоль средней линии ЦПК 4, интегрирована со сдвоенными НКК 15 и ПКК 16, толкающие четырехлопастные ВВ 17-18 и 19-20 которых вынесены к задним их кромкам, смонтированы с их ЭДГ в УОГ 21 на ХРЖ 22 в НКК 15 и ПКК 16. Каждый ВВ 17-18 и 19-20 имеет автоматическое назад по полету синхронное складывание его лопастей вдоль продольной оси его УОГ 21 без выноса их за габариты последнего. Каждая ЦПК 4, изменяющая требуемый угол 90° их поворота в вертикальной плоскости за счет разной тяги двух их ВВ 17-18 и 19-20 и жесткой в конечном положении одновременной фиксации ЦПК 4 с их соответствующими НКК 15 и ПКК 16.
Управление палубным УВДС обеспечивается с корабельного командного пункта, а целеуказание- радаром с АФАР 23 и ОЭС 24, смонтированным в носовой части фюзеляжа 1 и снизу него (см. фиг.3). Противолодочные АПР-3 или КАБ типа «Загон-2» смонтированы в бомбоотсеке на катапультных пусковых устройствах (на фиг. 1-3 не показано) для чего на конце фюзеляжа 1 имеется обтекатель магнитометра 25 или квантового гравиградиометра 26, обеспечивающего при полете над поверхностью воды поиск подлодок противника. При создании подъемной силы ВВ 17-18 и 19-20 и реактивной тяги ТРДД или совместной наклонно-маршевой их тяги при разбеге обеспечиваются режимы ВВП, зависания или КВП при соответствующем положении сдвоенных НКК 15 и ПКК 16 на их ЦПК 4. На режимах ВВП и зависания используется подъемная тяга, обеспечиваемая двумя ТРДД в их КМГ 12 и ВВ 17-18 и 19-20, которые, создавая противоположные крутящие моменты для управления, обеспечивают изменение высоты его полета всеми ВВ 17-18 и 19-20 за счет уменьшения или увеличения оборотов их двигателей в ВВПС-Х8 при постоянной реактивной тяге ТРДД, а увеличением/уменьшением оборотов на передних 19-20/задних 17-18 или левых 17, 19 /правых 18, 20 ВВ в НКК 15 и ПКК 16, вращающихся в противоположных направлениях, сохраняя общий момент вращения, обеспечивается балансировка по тангажу или крену, а изменение балансировки по курсу осуществляется за счет увеличения/уменьшения оборотов четырех ВВ 18, 19/17, 20, вращающихся против/по часовой стрелке соответственно на левых/правых НКК 15 и ПКК 16 (см. фиг. 2). Для перехода при горизонтальном полете в конфигурацию реактивного УВДС после остановки тормозами каждого ВВ 17-18 и 19-20 и фиксированного размещения их лопастей вдоль ХРЖ 22 в НКК 15 и ПКК 16, осуществляется автоматическое назад по полету синхронное складывание его лопастей вдоль продольной оси его УОГ 21 без выноса их за габариты последнего. На режиме переходного полета подъемная сила и маршевая тяга создается ВРК 2 и НКК 15 и ПКК 16 с их ВВ 17-18 и 19-20 совместно с двумя ТРДД соответственно, при полете как реактивного самолета со скоростью М=0,8…0,84 - ВРК 2 и НКК 15 и ПКК 16, реактивная тяга - двумя ТРДД. При горизонтальном полете внеаэродромного УВДС управление тангажом и рысканьем осуществляется отклонением рулей высоты 9 на хвостовом OVO 8 и цельно-поворотного переднего ПФК 7, а по крену- дифференциальным отклонением флаперонов 6 на ЦПК 4. При горизонтальном расположении ВРК 2 его ЦПК 4 с их НКК 15 и ПКК 16 складываются вперед по полету так, что перед бортами фюзеляжа 1 размещается передняя кромка ЦПК 4 с разнонаправленной ее стреловидностью χ=±23° (см. фиг. 2).
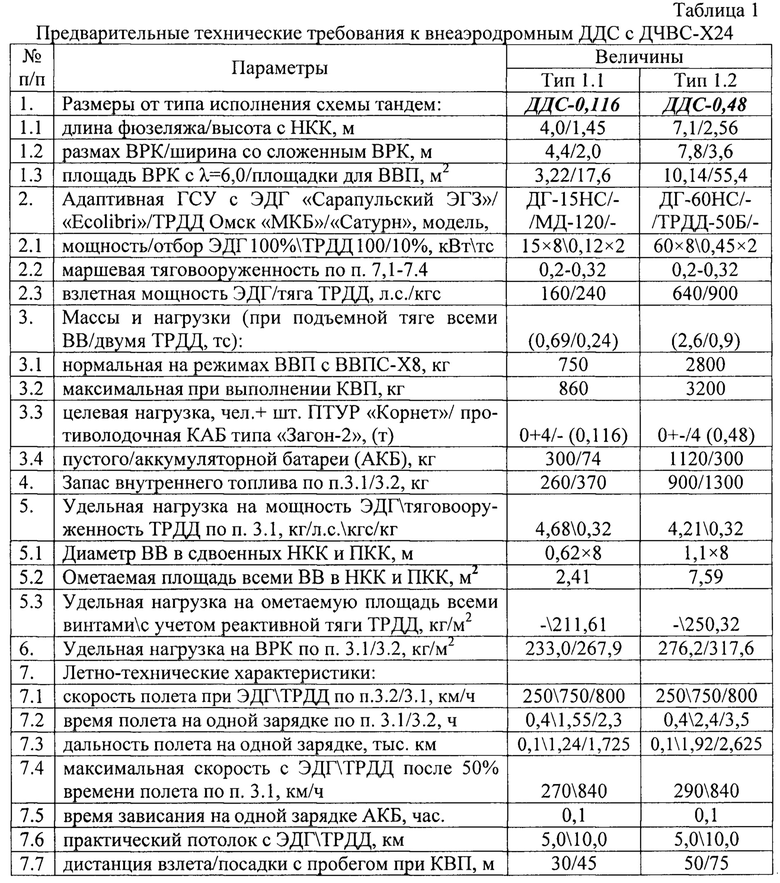
Таким образом, освоение палубного ДС-0,48 с его ВВПС-Х8, имеющего ВРК со складными его ЦПК, взлетный вес 2800 кг и в его ГСУ два ТРДД-50Б тягой по 450x2, кгс и восемь ЭДГ типа ДГ-60НС с их ВВ (d=1,1×8 м), позволит отработать ВВП со сдвоенными НПК и ПКК, смонтированными с их размещением бок о бок на ВРК, изменяющими угол поворота их ЦПК за счет тяги передних и задних их ВВ в их НПК и ПКК, имеет вооружение торпеду АПР-3М для поражения подлодки противника и время полета 2,4 часа при взлете его с палубы корабля проекта 1155, на котором взамен двух вертолетов Ка-27 базируется четыре противолодочных ДС-0,48 (см. табл. 1). Освоение (взамен конвертоплана М-80 ОКБ «Мясищева») транспортно-ударного внеаэродромного ДС-2,0, имеющего ВРК с их ЦПК и ГСУ с ТРДД мод. АЛ-55И тягой 1800×2, кгс и ЭДГ «Ecolibri» ЕМ-01 мощностью 175×8, кВт, приводящими в ВВПС-Х8 ее ВВ (d=2,8 м), изменяющие за счет тяги передних и задних их ВВ в их сдвоенных НКК и ПКК полетную конфигурацию с самолета ВВП в реактивный самолет, имеет при ВВП взлетный вес 11130 кг и площадку для ВВП 340,6 м2, позволит удлинить радиус действия четырех авиабомб ФАБ-500М с УМПК с 60 км до 1020 км.
Изобретение относится к области авиации, в частности к конструкциям конвертируемых самолетов. Конвертируемый дозвуковой самолет имеет складное высокорасположенное крыло с цельно-поворотными консолями, турбореактивные двухконтурные двигатели и электрические двигатели. Электрические двигатели снабжены воздушными винтами и размещены в более чем двух профилированных кольцевых каналах, интегрированных между собой и с высокорасположенным крылом. Крыло имеет закрылки и внешние флапероны. Движители создают воздушными винтами (ВВ) подъемную и маршевую распределенную или реактивную тягу в вертолетной и самолетной полетной конфигурации с низкой или высокой тепловой, звуковой сигнатурой в режиме полета с вращающимися или невращающимися ВВ при работающих соответствующих их двигателях. Обеспечивается упрощение конструкции узлов поворота крыла с винтами, улучшение продольной управляемости при вертикальном взлете-посадке, повышении скорости, дальности полета и транспортной эффективности. 1 з.п. ф-лы, 3 ил.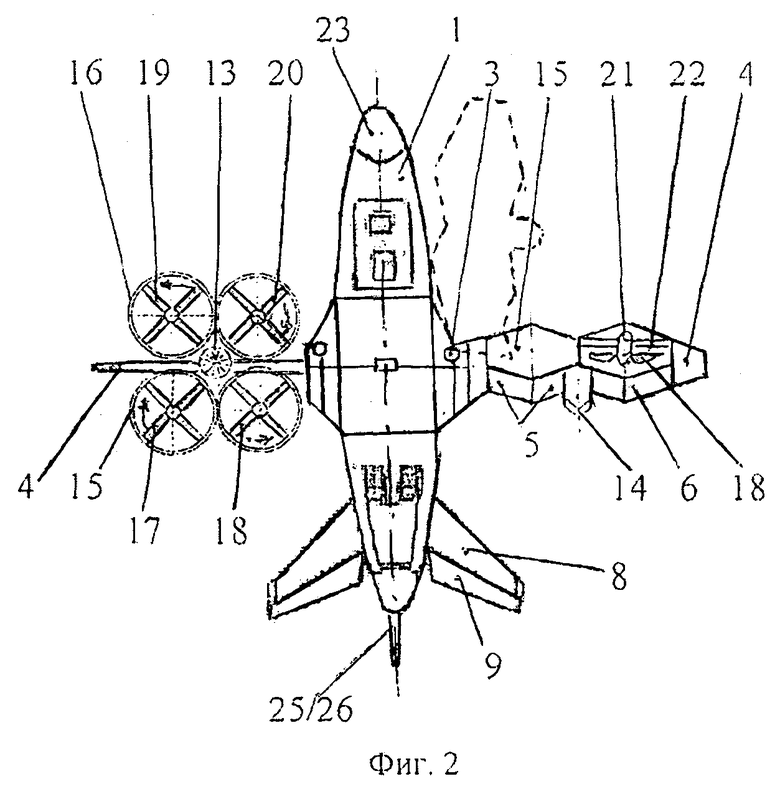
1. Конвертируемый дозвуковой самолет (ДС), имеющий крыло с подкрыльными двигателями силовой установки (СУ) и от них отдельно на его концах поворотные гондолы с винтами, фюзеляж, бортовую систему управления (БСУ), хвостовое Т-образное оперение и трехопорное колесное шасси, отличающийся тем, что он выполнен с возможностью выполнения вертикального и короткого взлета-посадки (ВВП и КВП) соответственно с вертолетной площадки и взлетно-посадочной полосы (ВПП), содержит по меньшей мере одно крыло, синхронно отклоняемые в вертикальной плоскости цельно-поворотные консоли (ЦПК) которого имеют с автозапуском более чем один турбореактивный двухконтурный и электрический двигатели (ТРДД и ЭД), последние из них с воздушными винтами (ВВ) нерегулируемого или регулируемого их шага размещены в более чем двух профилированных над- и подкрыльном кольцевых каналах (НКК и ПКК), интегрированных между собой и, например, с высокорасположенным крылом (ВРК), имеющим закрылки и внешние флапероны, причем вдоль средней линии каждой ЦПК и между каждой парой НКК и ПКК установлена крыльевая мотогондола (КМГ) с лобовым воздухозаборником ее малогабаритного ТРДД, имеющего прямоточное реактивное прямоугольное сопло (РПС) с термопоглощающим покрытием и V-образной в плане задней кромкой, вынесенной за соответствующую кромку ЦПК, при этом гибридная СУ (ГСУ) содержит на ВРК разнесенные реактивные и винтокольцевые движители (РРД и ВКД), имеющие соответственно ТРДД и ЭД, последние из которых приводят в НКК и ПКК их ВВ, например, нерегулируемого шага, создающие взлетную тягу, регулируемую изменением оборотов их ЭД, действующую вдоль продольной оси каждого ВКД совместно с подъемной тягой РРД, составляющей 25-26% от общей взлетной тяги ГСУ, и маршевую реактивную или распределенную тягу для выполнения ВВП, зависания или скрытного, огибая рельеф, горизонтального полета как реактивного и электрического самолета при подлете к цели с высокой и ее атаке с низкой тепловой, звуковой сигнатурой в режиме полета соответственно с невращательными и вращательными ВВ при работающих соответствующих их двигателях, причем каждый НКК и ПКК имеет обратное сужение с размещением его V-образных на виде сбоку передней и задней кромок к продольной оси НКК и ПКК с образованием трапециевидной его формы на виде спереди/сверху при ВВП/горизонтальном полете соответственно, интегрирован с ВРК, узлы поворота его ЦПК, связанные синхронизирующим валом, выполнены без механического либо с механическим приводом, либо в их комбинации и снабжены возможностью изменения вектора горизонтальной тяги ВВ в их НКК и ПКК на вертикальную и обратно посредством большей тяги нижних ВВ или верхних ВВ либо следящего механического привода, которые обеспечивают соответственно их поворот вверх или вниз при скорости поворота 4,5-6,0 град/сек на требуемый угол 90° и жесткой в конечном положении одновременной фиксации ЦПК с НКК и ПКК, при этом каждый ЭД-генератор (ЭДГ) и его ВВ интегрирован с удобообтекаемой гондолой (УОГ), смонтированной на профилированных Х-образных ребрах жесткости (ХРЖ) в НКК и ПКК, обеспечивает в ГСУ для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения ЭДГ от авторотации его ВВ при косой обдувке в НКК и ПКК от набегающего воздушного потока при горизонтальном полете ДС с маршевой тягой, создаваемой его ТРДД, причем при горизонтальном и вертикальном полете ДС передние кромки трапециевидных НКК и ПКК, размещенных на ЦПК бок о бок так, что передние их кромки совмещены или параллельны соответствующей кромке ВРК, при этом выполнение ВВП, зависания и автоматической вертикальной посадки гибридного ДС создается, например, двумя ТРДД совместно с восемью равновеликими ВВ, встречно вращающимися как в односторонних НКК и ПКК на каждой ЦПК, так и в противолежащих НКК и ПКК на каждой ЦПК в ВРК, образующими из трапециевидных НКК и ПКК совместно с ЦПК и трапециевидными их концевыми частями как пилообразные переднюю и заднюю кромки ВРК, так и восьмивинтовую поперечную схему (ВВПС), создающую противоположные крутящие моменты для управления, обеспечивает изменение высоты полета ДС за счет уменьшения/увеличения оборотов всех ЭДГ с их ВВ при постоянной тяге ТРДД, а увеличением/уменьшением оборотов на передних/задних или левых/правых ее ВВ, вращающихся в противоположных направлениях, сохраняя общий момент вращения, обеспечивается балансировка по тангажу или крену соответственно в их внутренних или внешних НКК и ПКК на ВРК, а изменение балансировки по курсу в ВВПС-Х8 осуществляется за счет увеличения/уменьшения оборотов ВВ, вращающихся соответственно по часовой/против часовой стрелки в диагонально расположенных сдвоенных НКК и ПКК на ВРК, причем в ГСУ при крейсерском полете ДС после остановки тормозами в каждом НКК и ПКК его ЭДГ с его тянущим или толкающим четырехлопастным ВВ, лопасти которого, размещаясь в радиальных прорезях за носком и вдоль средних линий ХРЖ или за ними в НКК и ПКК, жестко фиксируются или автоматически назад по полету синхронно складываются вдоль продольной оси его УОГ без выноса их за габариты последнего соответственно, что обеспечивает преобразование полетной его конфигурации с электрического в турбовентиляторный ДС, но и обратно с обеспечением повышения экологической и топливно-потребительской практичности, при этом для выполнения ВВП/КВП с нормальным/максимальным взлетным весом ДС имеются его как ГСУ, создающая подъемную/наклонную тягу при одновременном отклонении ЦПК и их фиксации с НКК и ПКК и их ВВ с КМГ и их ТРДД под углом 90°/40° средней линии ЦПК к горизонтали, так и хвостовое оперение прямой или обратной V-образности (ОПV или OOV) с рулевыми поверхностями, но и убирающиеся или неубирающиеся колеса упомянутого трехопорного шасси, смонтированные в отсеках фюзеляжа или удобообтекаемых обтекателях (УОО), закрепленных с амортизационными стойками самоориентирующихся небольших колес на законцовках цельно-поворотного переднего подфюзеляжного киля (ПФК) и хвостового OOV соответственно.
2. Конвертируемый ДС по п. 1, отличающийся тем, что уменьшение стояночной площади палубного ДС на вертолетной площадке или в ангаре корабля обеспечивается тем, что упомянутое ВРК при горизонтальном расположении его упомянутых ЦПК с их НКК и ПКК снабжено узлами поворота, смонтированными в корневых частях ВРК для складывания в горизонтальной плоскости вперед по полету так, что ЦПК и их НКК и ПКК размещаются перед соответствующими бортами фюзеляжа, имеющего сверху носовую выдвижную топливную штангу системы дозаправки в воздухе и трапециевидную планформу, причем в многоразовом ДС упомянутое его ВРК с ЦПК, передние кромки которых размещены параллельно задним, имеют упомянутую разнонаправленную стреловидность, например, χ=±12° или χ=±23°, что обеспечивает уменьшение требуемой маршевой тяговоуроженности (КМТ) в  раза, которая достигается упомянутыми ЭДГ/ТРДД в их адаптивной ГСУ и программируется на крейсерскую тяговоуроженность: первого или второго уровня, что позволяет достичь на высоте полета 5000 м/10000 м крейсерской или максимальной скорости полета Маха (М)=0,23/М=0,75 или М=0,27/М=0,79, но и существенно до 22%-30% увеличение топливной эффективности или скорости и дальности полета для скоростного или дозвукового крейсерского полета соответственно, при этом оптимизация продольного смещения упомянутых КМГ на упомянутых ЦПК в ВРК достигается определением каждого минимума соотношения для асимметричной конструкции малозаметного ДС, например для конструкции со смещением упомянутых КМГ с передней их кромкой V-образной планформы, локальный минимум соотношения коэффициентов сопротивления у которых возникает на расстоянии смещения, которое составляет приблизительно 19,9% от максимального смещения и которое соответствует примеру реализации со смещением КМГ в упомянутых левой и правой ЦПК и диапазоне расстояний смещения, который, обеспечивая два или более чем два положения, минимизирует волновое сопротивление для заданной конструкции ВРК с пилообразными его кромками, причем головной ДС, который полностью оцифрован и включает использование лазерного канала связи, что позволит его упомянутую БСУ оснастить обтекателями магнитометра либо квантового гравиградиометра и двухчастотной бортовой радиолокационной станцией (РЛС) с ее активной фазированной антенной решеткой (АФАР) и оптико-электронной станции (ОЭС), установленные соответственно на конце хвостовой балки и в носовой части и снизу нее упомянутого фюзеляжа для обеспечения на безопасных для него расстояниях геолокации малозаметной цели, но и управление своими оружейными нагрузками с наведением на цель, например, его зенитных или противотанковых управляемых ракет (ЗУР или ПТУР) типа «Игла-С» или «Корнет» либо авиационных противолодочных торпед типа АПР-3М или корректируемых авиабомб (КАБ) типа «Загон-2», установленных, например, в их ТПК, закрепленных на их подфюзеляжных пилонах либо в бомбоотсеке с автоматическими его створками на катапультных пусковых устройствах соответственно, при этом планер ДС, защищенный от соленого морского воздуха, выполнен по малозаметной технологии с покрытием, поглощающим радиоволны, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой его обшивке упомянутого фюзеляжа и его ВРК с ЦПК и их НКК и ПКК, но и его, например, ПФК с OOV, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно, упомянутой БСУ, обеспечивающей управление УВДС из кабины пилотом рядом летящего самолета-носителя или командного пункта средства базирования или автоматическое выполнение надрельефного полета либо над поверхностью воды посредством системы цифровой корреляции с рельефом местности, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет в носовом обтекателе фюзеляжа, но и установленную снизу него цифровую тепловизионную камеру, обеспечивающую корреляцию отображения объекта для фиксации местности перед ним, но и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать.
раза, которая достигается упомянутыми ЭДГ/ТРДД в их адаптивной ГСУ и программируется на крейсерскую тяговоуроженность: первого или второго уровня, что позволяет достичь на высоте полета 5000 м/10000 м крейсерской или максимальной скорости полета Маха (М)=0,23/М=0,75 или М=0,27/М=0,79, но и существенно до 22%-30% увеличение топливной эффективности или скорости и дальности полета для скоростного или дозвукового крейсерского полета соответственно, при этом оптимизация продольного смещения упомянутых КМГ на упомянутых ЦПК в ВРК достигается определением каждого минимума соотношения для асимметричной конструкции малозаметного ДС, например для конструкции со смещением упомянутых КМГ с передней их кромкой V-образной планформы, локальный минимум соотношения коэффициентов сопротивления у которых возникает на расстоянии смещения, которое составляет приблизительно 19,9% от максимального смещения и которое соответствует примеру реализации со смещением КМГ в упомянутых левой и правой ЦПК и диапазоне расстояний смещения, который, обеспечивая два или более чем два положения, минимизирует волновое сопротивление для заданной конструкции ВРК с пилообразными его кромками, причем головной ДС, который полностью оцифрован и включает использование лазерного канала связи, что позволит его упомянутую БСУ оснастить обтекателями магнитометра либо квантового гравиградиометра и двухчастотной бортовой радиолокационной станцией (РЛС) с ее активной фазированной антенной решеткой (АФАР) и оптико-электронной станции (ОЭС), установленные соответственно на конце хвостовой балки и в носовой части и снизу нее упомянутого фюзеляжа для обеспечения на безопасных для него расстояниях геолокации малозаметной цели, но и управление своими оружейными нагрузками с наведением на цель, например, его зенитных или противотанковых управляемых ракет (ЗУР или ПТУР) типа «Игла-С» или «Корнет» либо авиационных противолодочных торпед типа АПР-3М или корректируемых авиабомб (КАБ) типа «Загон-2», установленных, например, в их ТПК, закрепленных на их подфюзеляжных пилонах либо в бомбоотсеке с автоматическими его створками на катапультных пусковых устройствах соответственно, при этом планер ДС, защищенный от соленого морского воздуха, выполнен по малозаметной технологии с покрытием, поглощающим радиоволны, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой его обшивке упомянутого фюзеляжа и его ВРК с ЦПК и их НКК и ПКК, но и его, например, ПФК с OOV, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно, упомянутой БСУ, обеспечивающей управление УВДС из кабины пилотом рядом летящего самолета-носителя или командного пункта средства базирования или автоматическое выполнение надрельефного полета либо над поверхностью воды посредством системы цифровой корреляции с рельефом местности, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет в носовом обтекателе фюзеляжа, но и установленную снизу него цифровую тепловизионную камеру, обеспечивающую корреляцию отображения объекта для фиксации местности перед ним, но и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать.
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| EP 4269239 A1, 01.11.2023 | |||
| EP 3415424 A1, 19.12.2018 | |||
| US 11827348 B2, 28.11.2023 | |||
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |

