Изобретение относится к оптико-электронным системам наблюдения и может быть использовано в области вооружения и военной техники, в частности в системах управления огнем образцов бронетанкового вооружения (БТВ), т.е. танков, БМП, БМД, БТР, БРДМ, а также наземных роботизированных, в том числе автономных и дистанционно управляемых разведывательно-ударных комплексов военного назначения и т.п. Изобретение рассчитано прежде всего на современные образцы БТВ с цифровыми оптико-электронными системами прицеливания и видеонаблюдения. Реализация предлагаемой информационной обзорно-панорамной системы наблюдения возможна при разработке новых и в ходе модернизации существующих образцов БТВ и в целом направлено на повышение показателей их тактико-технических характеристик.
Отдаленным аналогом для заявленного изобретения является оптический прицел системы управления огнем (см. патент РФ на изобретение №2224206 МПК F41G 7/26, опубл. 20.02.2004 по заявке №2002119974/02 от 22.07.2002 г., патентообладатель Государственное унитарное предприятие «Конструкторское бюро приборостроения»). Сущность изобретений заключается в том, что в оптический прицел введены блок головного зеркала, обзорный канал, оптико-электронный канал наблюдения, кнопка возврата, устройство выверки каналов прицела, включающее регуляторы выверки. Блок головного зеркала и оптико-электронный канал наблюдения соединены с шиной управления, к которой подключено программное устройство, соединенное с блоком головного зеркала, дальномерным каналом, излучателем, модулятором, панкратической оптической системой и кнопкой возврата. Дальномерный, визирный, обзорный каналы и канал наведения объединены в единый модуль. Оптико-электронный канал наблюдения выполнен в виде отдельного модуля. Оба указанных модуля закреплены на нижней поверхности дополнительно введенного фланца, на верхней поверхности которого закреплен блок головного зеркала. Реализация изобретения позволяет обеспечить помехозащищенность и надежность системы управления огнем, а также повысить ремонтопригодность прицела.
Недостатком аналога является малая эффективность работы в ночных условиях из-за отсутствия тепловизионного канала.
Более близким аналогом является прицел-прибор наведения с лазерным дальномером (см. патент РФ на изобретение №№2464601 МПК G02B 23/02 (2006.01) F41G 3/06 (2006.01), опубл. 20.10.2012 по заявке №2011122221/28 от 02.06.2011 г., патентообладатель Открытое акционерное общество «Пеленг».) Прицел-прибор наведения включает корпус и взаимно параллельные визирный канал, лазерный дальномер, включающий передающий канал, содержащий импульсный лазер и телескоп, и приемный канал, включающий объектив визирного канала, систему разделения каналов й фотоприемное устройство, лазерный канал наведения, включающий непрерывный лазер, растровый модулятор, панкратическую систему, систему разделения каналов и объектив визирного канала. Система разделения каналов содержит поворотную плоскопараллельную пластину с зеркальным и диффузно отражающим покрытиями, расположенную на оси канала наведения с возможностью ее вывода. В передающий канал лазерного дальномера введен коллиматор видимого излучения, а на его выходе размещена первая система выверки. В лазерный канал наведения введена вторая система выверки и осветитель видимого излучения. Введены оптический блок с датчиком его положений, включающий жестко связанные между собой призму типа БкР-180° и световозвращатель, блок матричных светодиодных индикаторов, пульт управления и устройство управления и обработки электрических сигналов. Непрерывный лазер закреплен на корпусе и оптически связан с растровым модулятором через отверстие в корпусе. Технический результат - повышение точности стрельбы и наведения управляемых ракет на цель, повышение надежности, расширение функциональных возможностей.
Вместе с этим недостатком аналога является то, что у данного прибора отсутствует возможность панорамного обзора
Еще более близким аналогом является панорамный прибор наблюдения командира (см. патент РФ на изобретение №24682141 МПК F41G 3/00 (2006.01), опубл. 14.03.2019 по заявке №2018108426 от 12.02.2018 г., патентообладатель Акционерное общество «Вологодский оптико-механический завод» (АО "ВОМЗ")). Панорамный прибор наблюдения командира предназначается для обзора местности, обнаружения и опознавания целей, измерения дальности до цели и обеспечения целеуказания в условиях недостаточной видимости в любое время суток с места и с ходу. В состав панорамного прибора наблюдения командира входит блок оптический, выполненный в едином, имеющим возможность установки бронированных пластин, герметичном корпусе, включающем в себя телевизионный и тепловизионный каналы технического зрения, установленные на гиростабилизированной в вертикальной и горизонтальной плоскостях платформе, имеющей вертикальный точный привод, находящегося внутри горизонтального грубого привода, обеспечивающего вращение платформы на 360 градусов без ограничения числа оборотов в любую сторону, имеющий механизмы арретирования приводов, вычислитель следящей системы, блок гироскопического датчика, блок информационного обмена, блок видеопреобразователя, узел усилителей с платой усилителей мощности, блоки преобразования сигналов датчиков, плату управления арретирами, моментные двигатели, электромагниты арретиров, цифровые датчики угла, и входящий в состав прибора блок управления, выполненный в едином герметичном корпусе, включающий в себя плату коммутатора, плату информационного обмена, плату преобразователя, плату питания, имеющий цифровой канал связи. Конструкция прибора обеспечивает визуализацию служебной информации об исправности, установленном режиме, состоянии прибора. Для обеспечения измерения дальности и обеспечения позиционирования целей относительно прибора, в поле зрения, имеется дальномер «с базой на цели». Блок управления выполнен в едином герметичном корпусе, позволяет интегрировать прицел в систему управления огнем объекта применения, а также обеспечить режимы целеуказания от командира наводчику.
Достоинство данного аналога заключается в расширении функциональных возможностей боевой машины за счет обеспечения командира прибором с функциями панорамного обзора местности, уменьшения утомляемости командира за счет удобства работы и отсутствия необходимости поворота при слежении за фоно-целевой обстановкой, уменьшение времени прицеливания за счет наличия режима целеуказания, увеличение дальности обнаружения и опознавания цели за счет наличия тепловизионного канала, возможность ведения разведки при движении машины за счет наличия системы стабилизации поля зрения.
Недостаток аналога заключаются в малой информативности изображений выводимых для оператора (командира бронеобъекта) на экран видеосмотрового устройства (ВСУ).
Данный недостаток поясняется тем, что видеоизображения местности на экране ВСУ являются «моноскопическими», «плоскими», т.е. сформированными на основе применения одной камеры. Такие изображения не соответствуют по ширине обозреваемой местности углам, свойственным для человеческой зрительной системы, не позволяют видеть объемную трехмерную картину, т.е. являются малоинформативными по сравнению с изображениями человеческой зрительной системы. В следствие этого увеличивается время для командира бронеобъекта на их анализ, ориентирование на местности и принятие решения в сложившейся обстановке. Именно это приводит к тому, что довольно часто командир бронеобъекта, особенно при действиях на незнакомой местности, даже при наличии в его распоряжении высокотехнологичного прицельного комплекса оценку окружающей обстановки и ориентирование предпочитает проводить сам путем непосредственного обзора местности через открытые люки бронеобъекта, что подвергает его жизнь опасности и способствует срыву выполнения боевой задачи.
Следующий недостаток приведенного выше аналога заключается в отсутствии возможности быстрого обнаружения целей и наведения на них центральной прицельной марки прицела при приеме внешнего целеуказания, заключающегося в приеме координат целей по каналам системы управления тактического звена обнаруженных другим бронеобъектом или средством разведки. При чем, даже если аналог будет применяться совместно с аппаратурой внешнего целеуказания интегрированной в единую систему управления тактическим звеном, то сохранится необходимость проведения повторного визуального поиска и обнаружения каждой цели и важного объекта. К этому недостатку добавляется возможность проведение целеуказания единовременно только по одной цели. В совокупности приведенные недостатки приводят к дополнительным затратам времени на поиск и обнаружение целей при приеме и проведении целеуказания. При чем, если на знакомой местности и при сравнительно невысокой интенсивности боя у оператора на каждую цель может уходить от единиц до десятка секунд, при условии, что цель имеет четкий контраст с местностью, то в сложной фоноцелевой обстановке на незнакомой местности при интенсивном бое на каждую цель может тратиться время, измеряемое минутами. Заметим еще один недостаток, заключающийся в том, что даже с учетом автоматической передачи информации по цели и «подсвечиванием» ее положения на электронной карте графического планшета, время поиска и обнаружения цели для дальнейшего ее поражения зависит от субъективных качеств й подготовки командира. При этом если оператор, например, командир образца БТВ, неправильно сориентируется на местности, то достаточно высока вероятность допущения ошибки при выборе «подсвеченной» цели для поражения.
В качестве прототипа выбран прицел с применением способа внешнего целеуказания с индикацией целей для образцов бронетанкового вооружения (см. патент РФ на изобретение №2697047 МПК F41G 3/00 (2019.05), опубл. 08.04.2019 по заявке №2019101696, от 22.01.2019 г., патентообладатели Зубарь Алексей Владимирович, Кирнос Василий Иванович), включающий непосредственно прицел модульной или перископической конструкции с двухплоскостной независимой стабилизацией поля зрения и оптико-электронными каналами наблюдения одного или нескольких диапазонов, соединенный с обрабатывающей системой. Обрабатывающая система соединяется с навигационной системой, приемо-передающей аппаратурой системы управления тактическим звеном, а также датчиками курса, крена и тангажа образца вооружения.
Особенность реализуемого в прицеле способа заключается в обеспечении приема или передачи многоцелевого целеуказания в реальном масштабе времени как по находящимся в зоне прямой видимости, так и за ее пределами и укрытиями объектам при минимальной зависимости результата целеуказания от сложности фоноцелевой обстановки, интенсивности боя, а также качеств и подготовки экипажа образца вооружения. Данная особенность обеспечивается путем дополнительной индикации (выделения) местоположения целей непосредственно в поле зрения (на экране ВСУ) прицела. Тем самым минимизируются области поиска целей на изображении прицела, а соответственно, и затрачиваемое на процедуру поиска время. Кроме того, у прототипа присутствует возможность индикации в поле зрения прицела не только целей, но и прочих важных объектов, например, районов сосредоточения, районов развертывания колонн, мест нахождения пунктов управления и прочей тактической информации, что повышает скорость проведения ориентирования командира на местности.
Недостатками прототипа являются:
- малая информативность изображений, как и у вышеприведенного аналога, связанная с «плоскостью» сцены окружающего пространства на изображениях прицела;
-отсутствие возможности проведения индикации целей, а также расположения тактических и навигационных знаков на изображении с учетом их взаимного положения не только в плоскости изображения, но и глубины их расположения на реальной трехмерной обозреваемой местности;
- наличие погрешности индикации целей и важных объектов, возрастающей от центра к краям изображения, особенно при применении широкоугольных объективов. Данный недостаток определяется неучетом в процессе вычисления областей индикации радиальной дисторсии объективов, а также тангенциальной дисторсии, вызванной погрешностью установки фотоприемного устройства (ФПУ) относительно оптической оси объектива на этапе производства или по вине эксплуатации;
- наличие погрешности индикации целей и важных объектов ввиду неучета искажений изображений, вызванных преломлением света защитными стеклами прицела;
- повышенная сложность вычислений, связанная с большим количеством учитываемых внутренних параметров оптико-электронных каналов наблюдения;
- зависимость точности индикации от сохраняемости значений внутренних параметров оптико-электронных каналов наблюдения при их эксплуатации, в том числе в различных климатических условиях.
Таким образом, задачами, на решение которых направлено заявляемое изобретение, являются:
- во-первых, приведение единовременно обозреваемого пространства к параметрам близким зрительной системе человека и трехмерная визуализация наблюдаемой сцены через оптико-электронные каналы наблюдения прицела;
- во-вторых, трехмерная визуализация и пространственное масштабирование накладываемых на изображения областей выделения (индикации) целей, а также тактических и навигационных знаков;
- в-третьих, повышение точности индикации при наличии дисторсионных искажений изображений, а также при наличии искажений изображений, вызванных влиянием преломления защитного стекла прицела;
- в-четвертых, снижение количества учитываемых внутренних параметров, и как следствие снижение вычислительной сложности и зависимости точности индикации от сохраняемости их значений в процессе эксплуатации.
Решение первой задачи достигается введением к оптическому блоку с оптико-электронными каналами узкого и среднего полей зрения, лазерным дальномером, независимой двухплоскостной стабилизацией; - вертикальным приводом, обеспечивающим поворот каналов от минус 15 до плюс 45 градусов, горизонтальным приводом, обеспечивающим вращение платформы на 360 градусов без ограничения числа оборотов в любую сторону, датчиками вертикального и горизонтального наведения, дополнительных идентичных друг другу левого и правого оптических блоков информационно соединенных через шину данных с блоком управления, и имеющих поля зрения от 120 до 140 градусов, размещаемых параллельно на одной оси слева и справа от основного оптического блока и механически сопряженные с ним. При чем блок управления дополнительно оснащается обрабатывающей системой с памятью для хранения данных и измерительным приложением, содержащим программно-исполняемые модули или команды, обеспечивающие прием, обработку и передачу двух парных изображений или одного синтезированного-стереоизображения на нашлемную систему визуализации оператора. При этом нашлемная система визуализации, соединенная с блоком управления, выполняется в виде очков виртуальной или дополненной реальности с одним (для трансляции стереоизображения) или двумя (для трансляции пары изображений) микродисплеями высокого разрешения и двумя оптическими системами для левого и правого глаза оператора. Кроме того, нашлемная система визуализации в случае исполнения по типу дополненной реальности может содержать один (для трансляции стереоизображения) или два (для трансляции пары изображений) полупрозрачных экрана, позволяющих видеть оператору транслируемые изображения с микродисплеев в режиме дополненной реальности.
Решение второй задачи достигается соединением блока управления через высокоскоростную шину передачи данных с приемо-передающей аппаратурой системы управления тактическим звеном, навигационной системой, датчиками наведения прицела, датчиками курса, крена и тангажа бронеобъекта и включением в состав обрабатывающей системы блока управления измерительного приложения с программно-исполняемых модулями или командами обеспечивающими:
- прием данных о действующих пространственных ориентации и координатах образца вооружения, а также данных о действующих координатах и ориентации оптического блока, координатах целей или важных объектов, координатах точек тактических и навигационных знаков;
- вычисление для каждой цели, важного объекта, тактического и навигационного знаков пространственных трехмерных координат точек, характеризующих форму их областей выделения в пространстве;
- вычисление отдельно для изображений с основного, левого и правого оптических блоков пиксельных координат областей выделения целей, а также точек тактических и навигационных знаков;
- индикацию отдельно на изображениях с основного, левого и правого оптических блоков по вычисленным точкам областей выделения целей или важных объектов, а также тактических и навигационных знаков.
Решение третьей и четвертой задач достигается за счет применения выражений, позволяющих осуществлять переход от метрических трехмерных координат  изображений объектов в СК
изображений объектов в СК  оптико-электронного каналов (ОЭК) (камеры) основного, левого и правого оптических блоков (j-индекс камеры оптического блока) к плоским пиксельным координатам nj, mj и обратно, а именно:
оптико-электронного каналов (ОЭК) (камеры) основного, левого и правого оптических блоков (j-индекс камеры оптического блока) к плоским пиксельным координатам nj, mj и обратно, а именно:


где  - расширенный вектор плоских пиксельных координат
- расширенный вектор плоских пиксельных координат  изображения g-го объекта на плоскости изображения Imgj;
изображения g-го объекта на плоскости изображения Imgj;
 - расширенный вектор трехмерных метрических координат
- расширенный вектор трехмерных метрических координат  изображения g-го объекта на плоскости изображения Imgj, отстоящего от оптического центра объектива камеры на расстоянии
изображения g-го объекта на плоскости изображения Imgj, отстоящего от оптического центра объектива камеры на расстоянии 




 - приведенные пиксельные координаты изображения g-го объекта на изображении Imgj камеры j-го оптического блока;
- приведенные пиксельные координаты изображения g-го объекта на изображении Imgj камеры j-го оптического блока;
Nj и Mj - горизонтальное и вертикальное разрешение изображения;
c0,c1,c2,…cq и d0,d1,d2,…dq - полиномиальные коэффициенты прямого преобразования функций  соответственно;
соответственно;
 - полиномиальные коэффициенты обратного преобразования, соответственно, функций
- полиномиальные коэффициенты обратного преобразования, соответственно, функций  q-го порядка;
q-го порядка;
 - углы на интересующий g-ый объект в горизонтальной и вертикальной плоскостях относительно оптической оси объектива;
- углы на интересующий g-ый объект в горизонтальной и вертикальной плоскостях относительно оптической оси объектива;
При этом применение полиномов 
 обеспечивает установление математической связи между пиксельными координатами
обеспечивает установление математической связи между пиксельными координатами  изображения объекта и его трехмерными координатами
изображения объекта и его трехмерными координатами  в СК
в СК  камеры при работе с дисторсионно-искаженными или искаженными в ходе преломления света в защитном стекле прицела цифровыми изображениями Imgj, в том числе не соответствующими своим разрешением физическому разрешению фотоприемного устройства, а также применение камер с неизвестными техническими параметрами, в том числе с учетом возможных погрешностей, допущенных при их изготовлении или возникших по вине эксплуатации. При чем вычисляться коэффициенты c0,c1,c2,…cq и d0,d1,d2,…dq,
камеры при работе с дисторсионно-искаженными или искаженными в ходе преломления света в защитном стекле прицела цифровыми изображениями Imgj, в том числе не соответствующими своим разрешением физическому разрешению фотоприемного устройства, а также применение камер с неизвестными техническими параметрами, в том числе с учетом возможных погрешностей, допущенных при их изготовлении или возникших по вине эксплуатации. При чем вычисляться коэффициенты c0,c1,c2,…cq и d0,d1,d2,…dq,  должны для каждой j-ой камеры индивидуально при ее производстве и сборке, или уточняться непосредственно перед применением системы наблюдения при воздействии длительных вибрационных или ударных нагрузок, или при смене климатических условий путем проведения калибровки.
должны для каждой j-ой камеры индивидуально при ее производстве и сборке, или уточняться непосредственно перед применением системы наблюдения при воздействии длительных вибрационных или ударных нагрузок, или при смене климатических условий путем проведения калибровки.
Основным техническим результатом, обеспечиваемым приведенной совокупностью признаков, являются:
- меньшая уставаемость оператора, а также сокращение его временных затрат на ориентирование на незнакомой местности и на поиск целей при проведении внешнего целеуказания за счет повышения информативности изображений путем приведения наблюдаемой сцены по ширине обозреваемого пространства к естественно воспринимаемой зрительной системой человека, а также трехмерной визуализации как самой наблюдаемой сцены, так и пространственных форм, и взаимного положения выводимых на него областей выделения, тактических и навигационных знаков;
- повышение точности графической индикации при применении широкоугольных объективов в условиях наличия искажений изображений радиальной и тангенциальной дисторсии, а также влияния на преломление света, а соответственно, и на геометрию изображений защитных стекол прицелов;
- снижение требований к вычислительным ресурсам обрабатывающей системы за счет уменьшения количества учитываемых параметров ОЭК наблюдения;
- повышение надежности системы при воздействии ударных или длительных вибрационных нагрузок за счет обеспечения возможности проведения дополнительной калибровки ОЭК наблюдений, связанной с уточнением значений коэффициентов полиномов  q-го порядка, описывающих математическую связь между вертикальными и горизонтальным углами на интересующий объект и соответствующими значениями его пиксельных координат на принимаемых цифровых изображениях Imgj.
q-го порядка, описывающих математическую связь между вертикальными и горизонтальным углами на интересующий объект и соответствующими значениями его пиксельных координат на принимаемых цифровых изображениях Imgj.
Кроме того, к техническим результатам может быть отнесено повышение уровня интеграции информационной обзорно-панорамной системы наблюдения бронеобъекта в единую систему управления тактическим звеном.
Изобретение поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения:
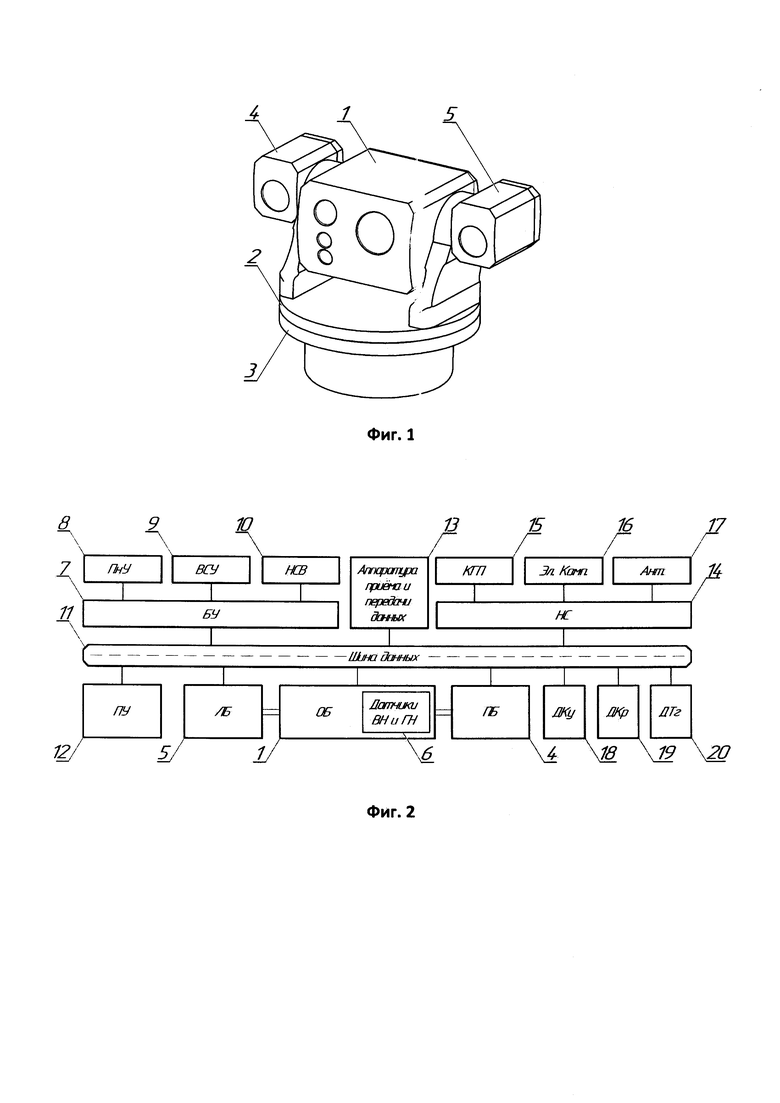
на фиг. 1 показан вариант внешнего вида оптического блока с приводами наведения и дополнительными левым и правым оптическими боками;
на фиг. 2 иллюстрируется функциональная схема информационной обзорной-панорамной системы наблюдения;
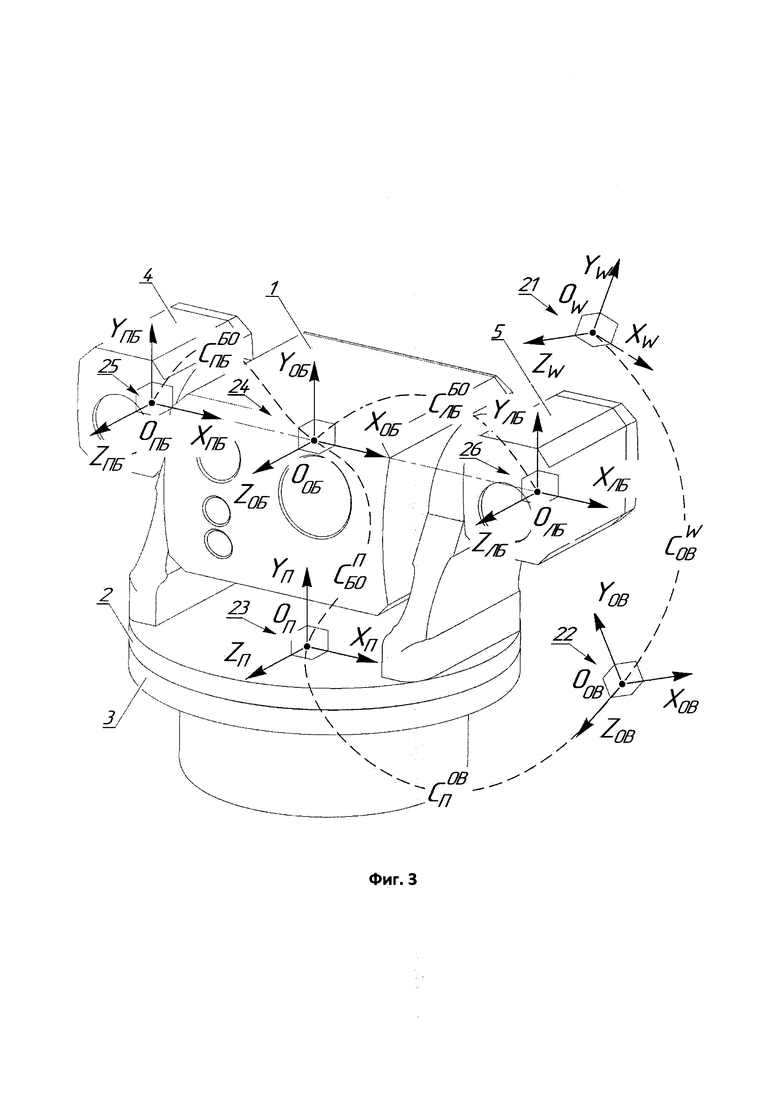
на фиг. 3 иллюстрируется размещение и взаимная связь между описываемыми системами координат;
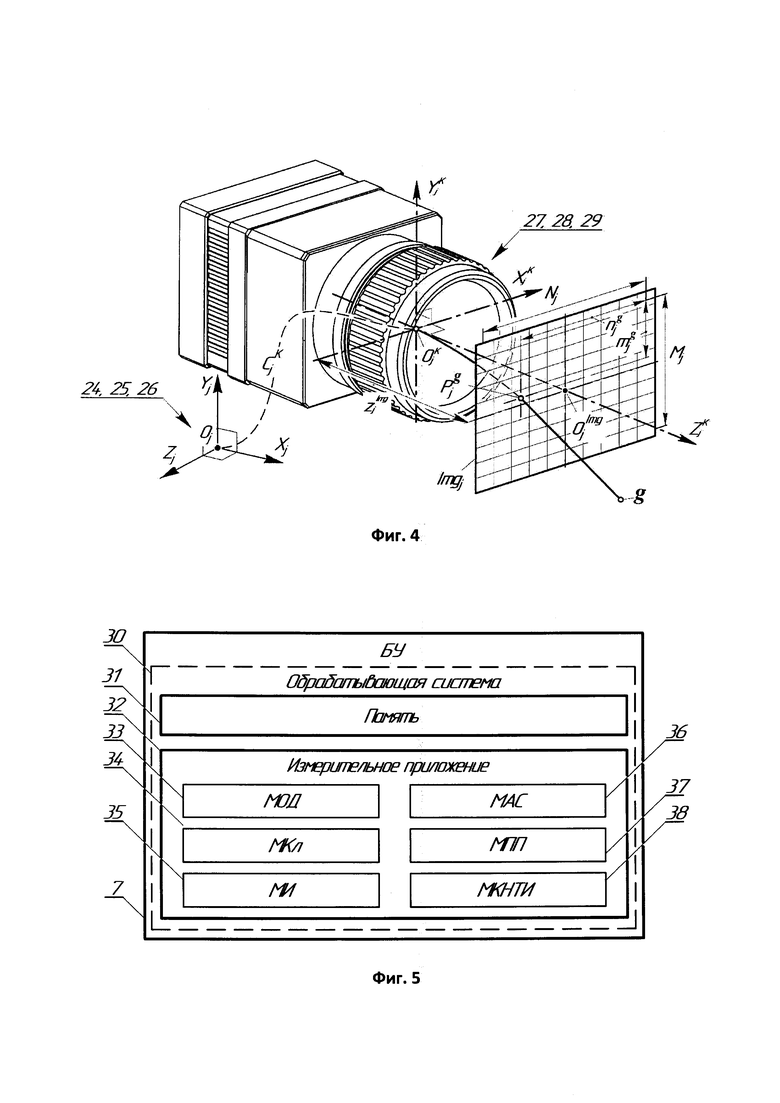
на фиг. 4 иллюстрируется взаимное положения системы координат оптико-электронного канала (камеры) видеонаблюдения, объекта наблюдения, цифрового изображения и системы координат оптического блока, в котором устанавливается данная камера;
на фиг. 5 показан состав блока управления информационной обзорной-панорамной системы наблюдения;
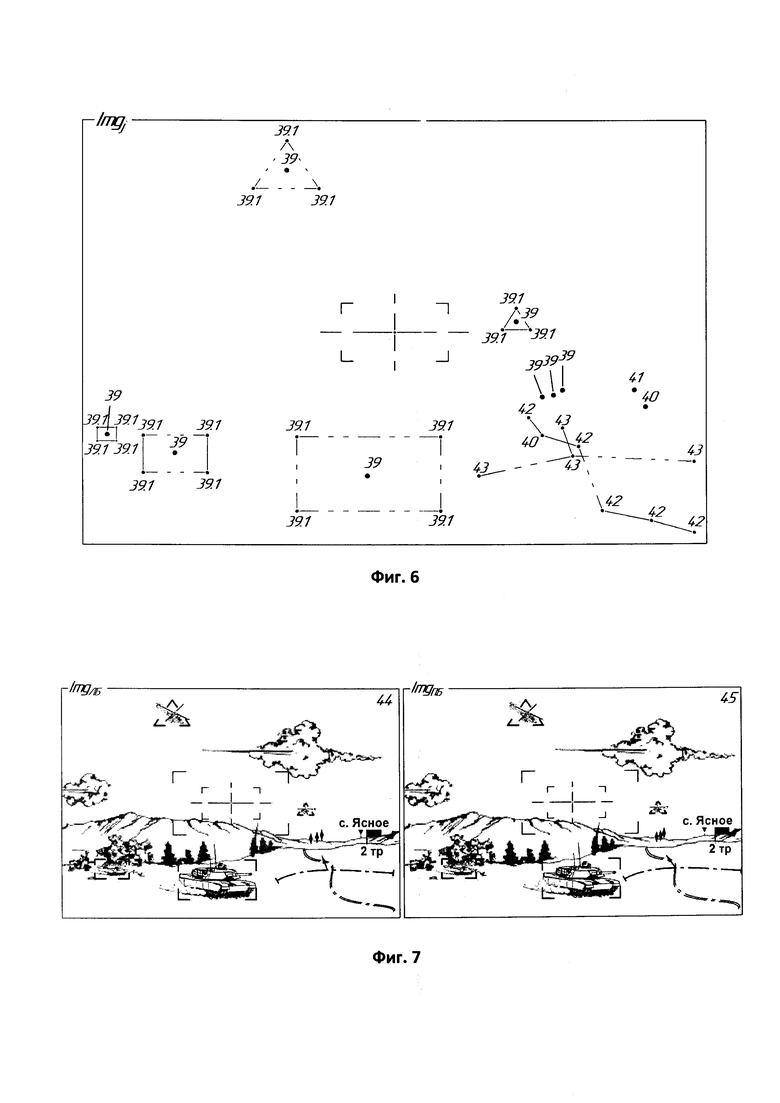
на фиг. 6 иллюстрируются точки целей, областей их выделения, точки тактических и навигационных знаков, пиксельные координаты которых определяются в блоке управления для каждой камеры оптических блоков информационной обзорной-панорамной системы наблюдения;
на фиг. 7 иллюстрируются цифровые изображения с графически выделенными целями, важными объектами, тактической и навигационной информацией, выводимые не видеосмотровое устройство или на микродисплеи нашлемной системы визуализации оператора информационной обзорной-панорамной системы наблюдения.
Описываемая ИОПСН с учетом получаемых технических результатов должна содержать по крайней мере (Фиг. 1, Фиг. 2):
- основной оптический блок (ОБ) 1 с датчиками вертикального и горизонтального наведения 6;
- дополнительные левый (ЛБ) 4 и правый (ПБ) 5 оптические блоки;
- пульт управления (ПУ) 12;
- высокоскоростную шину данных 11;
- блок управления (БУ) 7 с панелью управления (ПнУ) 8, видеосмостровым устройством (ВСУ) 9 и нашлемной системой визуализации (НСВ) 10;
- аппаратуру 13 приема и передачи информации с единой системы управления тактическим звеном (ЕСУ ТЗ);
- навигационную систему (НС) 14 с картографическим планшетном (КГП) 15, электронным компасом (Эл. Комп.) 16 и антенной 17;
- датчики курса (ДКу) 18, крена (ДКр) 19 и тангажа (ДТг) 20;
- а также прочие подсистемы и датчики, обеспечивающие выполнение всего перечня функциональных возможностей и эффективную работу современных прицелов и приборов наблюдения, но не связанные непосредственно с достигаемыми техническими результатами заявленного изобретения (на чертежах не показано).,
Шина данных 11 (Фиг. 2) является последовательной информационной шиной, выполненной с возможностью подключения дополнительных информационно-исполнительных блоков, а также групп пространственно разнесенных электронных устройств или систем и осуществления информационного высокоскоростного обмена данными между ними с использованием резервных пачек данных основного протокола либо информационного обмена по своим протоколам, либо через шлюзы. К шине данных 11 своими информационными выходами через соответствующие протоколы подсоединены БУ 7, аппаратура 13, НС 14, ПУ 12, ЛБ 5, ОБ 1, ПБ 4, ДКу 18, ДКр 19, ДТг 20 и прочие подсистемы и датчики.
ОБ 1 (Фиг. 1) может иметь модульную или перископическую конструкцию, выполняется в панорамном исполнении c двухплоскостной независимой стабилизацией поля зрения и содержит по крайней мере цифровые телевизионный и тепловизионный каналы с узкими полями зрения, а также дальномер, например, лазерный. ОБ 1 устанавливается в бронированном контейнере с защитным стеклом на башне бронеобъекта. Кроме этого ОБ 1 должен быть оснащен датчиками 6 вертикального и горизонтального наведения, обеспечивающими получение текущих значений углов βОБ, αОБ отклонения ОБ 1 относительно подвижного основания 2, и соответственно отклонения подвижного основания 2 относительно неподвижного основания прицела 3, которым обеспечивается его крепление на образце БТВ. Кроме этого ОБ 1 дополнительно может оснащаться связанной с ним пулеметной установкой.
ПУ 12 (Фиг. 2) предназначен для наведения центральной прицельной марки ОБ 1 на обнаруженные цели, управления наведением поля зрения ОБ 1 при проведении поиска целей и осуществления стрельбы командиром бронеобъекта из пулеметной установки ОБ 1 или основного вооружения при включении режима дублированного управления вооружением.
ЛБ 5 и ПБ 4 (Фиг. 1, Фиг. 2) представляют собой бронированные контейнеры, внутри которых за защитным стеклом размещается одна или несколько ОЭК видеонаблюдения с широким полем зрения. Наведение и стабилизация ЛБ 5 и ПБ 4 осуществляется зависимо от ОБ 1, путем механического крепления (совмещения) ЛБ 5 и ПБ 4 с осью вертикальной прокачки ОБ 1 в верхней его поворотной платформе 2. При чем конструктивно, а также по количеству и параметрам ОЭК наблюдения ЛБ 5 и ПБ 4 должны быть полностью идентичны и размещаться на оси вертикальной прокачки ОБ 1 слева и справа от него, так, чтобы оптические оси их ОЭК (камер) наблюдения всегда оставались параллельными в пространстве.
Аппаратура 13 (Фиг. 2) приема и передачи данных обеспечивает информационный обмен тактической информацией по каналам связи ЕСУ ТЗ. В частности, аппаратура 13 принимает координаты и типы обнаруженных (вскрытых) целей, важных объектов, координаты точек тактических знаков, отражающих тактические задачи подразделения, положение соседей, противника, районы сосредоточения, районы развертывания, районы минных полей и прочую тактическую информацию, примерами таких точек могут быть точки 39, 40, 43, показанные на фиг. 6. Кроме этого аппаратура 13 обеспечивает передачу тактической информации в систему ЕСУ ТЗ с выполняемой в настоящее время боевой задачек бронеобъектом, его координатами, а также координатами и типами обнаруженных целей и важных объектов.
НС 14 (Фиг. 2) по средствам приема и обработки информации с антенны 17 и электронного компаса 16 обеспечивает:
- определение текущих координат  бронеобъекта и угла ориентации
бронеобъекта и угла ориентации  относительно направления на север;
относительно направления на север;
- графическое отображение на электронной карте КГП 15 положения и ориентации бронеобъекта;
- прием по каналу шины данных с аппаратуры 13 данных об положении тактических знаков и их графическое отображение на электронной карте КГП 15;
- формирование навигационных знаков и отображение их на электронной карте местности;
- вычисление и передачу в БУ 7 для каждого из навигационных знаков трехмерных координат точек, описывающих их форму и положение на электронной карте местности. Примерами таких точек могут быть точки 41, 42, показанные на фиг. 6.
НС 14 (Фиг. 2) может дополнительно содержать дублирующую инерционную систему навигации, обеспечивающую определение текущих координат и ориентации образца вооружения при радиоэлектронном подавлении спутниковых навигационных сигналов.
Датчики ДКу 18, ДКр 19, ДТг 20 (Фиг. 2) обеспечивают получение данных о текущих значениях углов  ориентации осей СК 22 OОВXОВYОВZОВ (Фиг. 3) образца вооружения относительно осей мировой СК 21 OWXWYWZW.
ориентации осей СК 22 OОВXОВYОВZОВ (Фиг. 3) образца вооружения относительно осей мировой СК 21 OWXWYWZW.
Под мировой (внешней) СК 21 OWXWYWZW (Фиг. 3) понимается СК в которой осуществляется глобальное позиционирование объектов на поверхности земли.
Под СК 22 понимается СК OОВXОВYОВ (Фиг. 3) своим началом расположенная в геометрическом центре плоскости погона башни, осью ООВХОВ направленная вперед в сторону основного вооружения, осью OОВYОВ - влево, а осью OОВZОВ - строго вверх башни. Данные о положении начала СК 22 OОВXОВYОВ, т.е. координатах  бронеобъекта, и ориентации осей OОВYОВ, OОВYОВ, OОВZОВ относительно осей мировой СК 21, т.е. углы
бронеобъекта, и ориентации осей OОВYОВ, OОВYОВ, OОВZОВ относительно осей мировой СК 21, т.е. углы  определяются по информации с навигационной системы и датчиков ДКу 18, ДКр 19 и ДТг 20.
определяются по информации с навигационной системы и датчиков ДКу 18, ДКр 19 и ДТг 20.
Под СК 23 (Фиг. 3) положения прицела, принимается СК OПXПYПZП жестко связанная с местом крепления неподвижного основании 3 ОБ 1 на башне образца БТВ. Положение т.е. координаты  прицела, и ориентации, осей ОПХП, OПYП, OПZП относительно осей СК 22, т.е. углы
прицела, и ориентации, осей ОПХП, OПYП, OПZП относительно осей СК 22, т.е. углы  определяются по конструкторской технической документации на бронеобъект, и могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
определяются по конструкторской технической документации на бронеобъект, и могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
Под СК 24 (Фиг. 3) положения ОБ 1 принимается СК OОБXОБYОБZОБ расположенная своим началом ООБ в геометрическом центре ОБ 1 и осью ООБХОБ -на оси вертикальной прокачки ОБ 1. Ось OОБZОБ направляется вперед, в сторону входных окон ОЭК, а ось OОБYОБ - вверх ОБ 1. Положение т.е. координаты  ОБ 1, и ориентации, осей ОПХП, OПZП относительно осей СК 23 OПXПYПZП основания прицела, т.е. углы
ОБ 1, и ориентации, осей ОПХП, OПZП относительно осей СК 23 OПXПYПZП основания прицела, т.е. углы  определяются по конструкторской технической документации на прицел и по информации с датчиков 6 вертикального и горизонтального наведения, а также могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
определяются по конструкторской технической документации на прицел и по информации с датчиков 6 вертикального и горизонтального наведения, а также могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
Под СК 25 и 26 (Фиг. 3), соответственно, ПБ 4 и ЛБ 5 принимаются СК OПБXПБYПБZПБ и ОЛБХЛБYЛБZЛБ расположенные своими началами ОПБ и ОЛБ в геометрических центрах ПБ 4 и ЛБ 5 и осями ОПБХПБ и ОЛБХПБ - на оси вертикальной прокачки ОБ 1. Оси OПБZПБ и ОЛБZЛБ направляется вперед, в сторону входных окон ОЭК, а оси ОПБYПБ и ОЛБYЛБ - вверх ПБ 4 и ЛБ 5 соответственно. Положение т.е. координаты  ПБ 4 и ЛБ 5, а также ориентация осей ОЛБХЛБ, ОЛБYЛБ, OЛБZЛБ, ОПБХПБ, ОПБYПБ, ОПБZПБ относительно осей СК 24 ОБ 1, т.е. углы
ПБ 4 и ЛБ 5, а также ориентация осей ОЛБХЛБ, ОЛБYЛБ, OЛБZЛБ, ОПБХПБ, ОПБYПБ, ОПБZПБ относительно осей СК 24 ОБ 1, т.е. углы  определяются по конструкторской технической документации на прицел, и могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
определяются по конструкторской технической документации на прицел, и могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
Под СК 27, 28, 29 (Фиг. 4) соответственно, ОЭК (камер) видеонаблюдения, ОБ 1, ПБ 4 и ЛБ 5 принимаются СК  где j - индекс принадлежности к ОБ 1, ПБ 4 или ЛБ 5, совпадающие с оптическими центрами объективов, располагаются своими началами
где j - индекс принадлежности к ОБ 1, ПБ 4 или ЛБ 5, совпадающие с оптическими центрами объективов, располагаются своими началами  внутри ОБ 1, ПБ 4 или ЛБ 5. Оси
внутри ОБ 1, ПБ 4 или ЛБ 5. Оси  направляется вперед по оптическим осям ОЭК, задаются параллельными друг другу, оси
направляется вперед по оптическим осям ОЭК, задаются параллельными друг другу, оси  - вверх, а оси
- вверх, а оси  - вправо ОБ 1, ПБ 4 или ЛБ 5, соответственно. Положение, т.е. координаты
- вправо ОБ 1, ПБ 4 или ЛБ 5, соответственно. Положение, т.е. координаты  ОЭК ОБ 1, ПБ 4 или ЛБ 5, а также ориентация осей
ОЭК ОБ 1, ПБ 4 или ЛБ 5, а также ориентация осей  относительно осей СК OjXjYjZj 24, 25, 26 своего оптического блока, соответственно ОБ 1, ПБ 4 или ЛБ5, т.е. углы
относительно осей СК OjXjYjZj 24, 25, 26 своего оптического блока, соответственно ОБ 1, ПБ 4 или ЛБ5, т.е. углы  определяются по конструкторской технической документации на прицел, и могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
определяются по конструкторской технической документации на прицел, и могут уточняться путем введения соответствующих поправок при проведении внешней калибровки ИОПСН.
БУ 7 (Фиг. 2) выполняется в едином герметичном корпусе. К его входам подключаются ПнУ 8, ВСУ 9 и НСВ 10, в совокупности образующие пользовательский интерфейс, обеспечивающий в свою очередь выбор оператором изображений и/или ввод команд обработки. Команды обработки содержат, например, команды на прием видеоданных от ОБ 1, ЛБ 5 или ПБ 4, команды на указание объектов интереса, команды на прием или передачу целеуказания и пр. ВСУ 9 содержит дисплей, такой как жидкокристаллический монитор и предназначено для просмотра видеоданных. ПнУ 8 такая как как клавиатура или указательное устройство (например, мышь, шаровой указатель, стилус, сенсорная панель или другое устройство) предназначено для обеспечения взаимодействия оператора с видеоданными. НСВ 10 предназначена для трехмерной визуализации наблюдаемой местности и выводимых на ней областей выделения, тактических и навигационных знаков.
БУ 7 (Фиг. 5) дополнительно содержит обрабатывающую систему 30. Обрабатывающая система 30 является удаленным компьютером, таким как рабочая станция, персональный компьютер или ноутбук, она содержит измерительное приложение 32 и память 31 для хранения данных, размещенные на машиночитаемом носителе.
Машиночитаемый носитель (на чертеже не показано) может включать энергозависимые носители, энергонезависимые носители, съемные носители и несъемные носители, а также может быть любой доступной средой, к которой может иметь доступ универсальное вычислительное устройство. Неограничивающие примеры машиночитаемого носителя могут включать компьютерные накопители и среды передачи данных. Компьютерные накопители дополнительно могут включать энергозависимые, энергонезависимые, съемные и несъемные носители, осуществленные любым способом или с помощью любой технологии хранения информации, например, машиночитаемые инструкции, структуры данных, программные модули или другие данные.
Память 31 выполняется с возможностью хранения обрабатываемых изображений и данных измерительного приложения 32.
Цифровые изображения Imgj (Фиг. 4), получаемые с j-ых камер ОБ 1, ЛБ 5 и ПБ 4 состоят из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения. В полутоновых изображениях значение пикселя представляет собой одну величину, которая характеризует яркость пикселя; Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения черного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов. В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB - красный, зеленый, синий) должны быть отдельно определены красная, зеленая и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зеленого и синего цветов), которые можно воссоединять при отображении или при обработке.
Измерительное приложение 32 (Фиг. 5) содержит программно-исполняемые модули или команды, выполненные с возможностью исполнения по меньшей мере одним процессором и обеспечивающие прием и обработку данных. Например, измерительное приложение 32 может содержать модули автоматического поиска, автоматической выверки, обнаружения и распознавания целей, модули цифровой стабилизации поля зрения, модули повышения информативности изображений, модули обучения и самотестирования и т.п. Для обеспечения же достижения технического результата заявленного изобретения измерительное приложение должно содержать по крайней мере следующие программно-исполняемые модули.
Модуль обмена данными (МОД) 33 (Фиг. 2) выполнен с возможностью приема и передачи данных через соответствующие интерфейс и протоколы с шиной данных 11. В частности, МОД 33 при подключении к шине данных обнаруживает проводное соединение и принимает цифровые изображения с камер ОБ 1, ЛБ 5, ПБ 4, данные с датчиков ДКу 18, ДКр 19 и ДТг 2, данные с аппаратуры 16, НС 15, и ПУ 17 и передает их для хранения в память 31.
Модуль калибровки (МКл) 34 выполнен с возможностью определения данных внешней и внутренней калибровки камер ОБ 1, ЛБ 5 и ПБ 4.
Под внутренней калибровкой ОЭК (камер) ОБ 1, ПБ 4 или ЛБ 5 понимается процесс описания полиномами  q-го порядка взаимосвязей между вертикальными и горизонтальным углами
q-го порядка взаимосвязей между вертикальными и горизонтальным углами  на интересующий g-ый объект относительно j-ой камеры с соответствующими значениями его пиксельных координат
на интересующий g-ый объект относительно j-ой камеры с соответствующими значениями его пиксельных координат  на принимаемых с j-ой камеры цифровых изображениях.
на принимаемых с j-ой камеры цифровых изображениях.
Внешняя калибровка заключается в определении координат и взаимных ориентаций СК 22-26 (Фиг. 3), сравнение полученных значений со значениями из конструкторской документации на образец вооружения и значениями с датчиков 6 наведения ОБ 1, датчиков ДКу 18, ДКр 19 и ДТг 20, уточнение с сохранением в память соответствующих поправок.
Модуль интерфейса (МИ) 35 (Фиг. 5) выполнен с возможностью создания форм 44, 45 (фиг. 7) управления изображением для отображения через ВСУ 9 или НСВ 10 оператора (фиг. 2) и содержит команды, позволяющие через ПнУ 8 взаимодействовать с измерительным приложением 32.
Формы 44, 45 (фиг. 7) управления изображением содержат различные виды, которые обеспечивают возможность отображения видеоданных, графическое отображение областей выделения, тактических и навигационных знаков, взаимодействие пользователя с видеоданными, указания целей или важных объектов, которых необходимо взять на автосопровождение и провести целеуказание, а также отображение прочей технической информации о состоянии и режимах работы прицельно-наблюдательного комплекса образца бронетанкового вооружения, например, графических маркеров тактических знаков, навигационных знаков согласно их типу, графическое представление областей выделения. При чем количество одновременно отображаемой графической информации МИ 35 в любой момент времени может быть изменено оператором ИОПСН. Кроме того, МИ 28 поддерживает возможность вывода в полях зрения ЛБ 5, ПБ 4 по типу «картинка в картинке» поля зрения камеры ОБ 1.
Модуль автосопровождения (MAC) 36 (фиг. 5) выполнен с возможностью автоматического сопровождения указанных оператором ИОПСН, а также поступивших по каналам целеуказания или обнаруженных в результате работы системы автоматического обнаружения целей и важных объектов и передачи информации сопровождения о них, в частности, векторов  и
и  в память 31.
в память 31.
Модуль пространственного положения (MПП) 37 (фиг. 5) выполнен с возможностью:
- считывания из памяти 31 текущих значений координат  угла на север
угла на север  углов
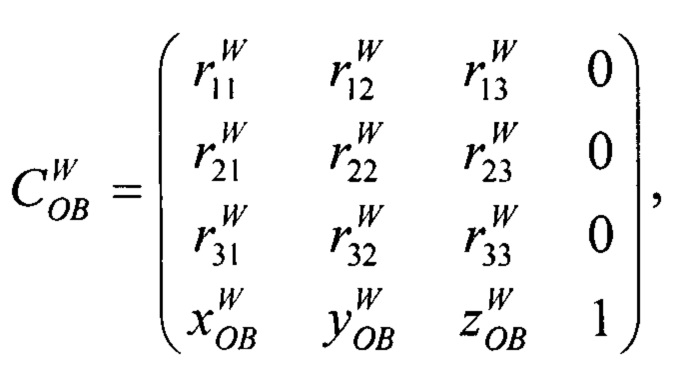
углов  и записи в память 31 матрицы
и записи в память 31 матрицы  положения СК 22 OobXobYob образца вооружения (фиг. 3) в мировой СК 21 OWXWYWZW
положения СК 22 OobXobYob образца вооружения (фиг. 3) в мировой СК 21 OWXWYWZW
где 
- считывания из памяти 31 координат  и текущих значений углов
и текущих значений углов  ориентации основания 3 (фиг. 1, 2) прицела и записи в память 31 матрицы
ориентации основания 3 (фиг. 1, 2) прицела и записи в память 31 матрицы  положения СК 23 OПXПYПZП основания прицела (фиг. 3) в СК 22 OОВXОВYОВ
положения СК 23 OПXПYПZП основания прицела (фиг. 3) в СК 22 OОВXОВYОВ
где 
- считывания из памяти 31 координат  положения ОБ 1 прицела и текущих значений углов
положения ОБ 1 прицела и текущих значений углов  его ориентации и записывает в память 31 матрицы
его ориентации и записывает в память 31 матрицы  положения СК 24 OОБXОБYОБZОБ ОБ 1 (фиг. 3) в СК 23 OПXПYПZП основания прицела
положения СК 24 OОБXОБYОБZОБ ОБ 1 (фиг. 3) в СК 23 OПXПYПZП основания прицела

- считывания из памяти 31 координат  и значений углов
и значений углов  ориентации ПБ 4 (фиг. 3) и записи в память матрицы
ориентации ПБ 4 (фиг. 3) и записи в память матрицы  положения СК 25 OПБХПБYПБZПБ ПБ 4 в СК 24 OОБXОБYОБZОБ ОБ 1
положения СК 25 OПБХПБYПБZПБ ПБ 4 в СК 24 OОБXОБYОБZОБ ОБ 1
где 
- считывания из памяти 31 координат  и значений углов
и значений углов  ориентации ЛБ 5 (фиг. 3) и записи в память 31 матрицы
ориентации ЛБ 5 (фиг. 3) и записи в память 31 матрицы  положения СК 26 ОЛБХЛБYЛБZЛБ ЛБ 5 в СК 24 OОБХОБYОБZОБ ОБ 1
положения СК 26 ОЛБХЛБYЛБZЛБ ЛБ 5 в СК 24 OОБХОБYОБZОБ ОБ 1
где 
- считывания из памяти 31 координат  и значений углов
и значений углов  ориентации СК 27, 28, 29 ОЭК видеонаблюдения (камер) (фиг. 4) и записи в память 31 матриц
ориентации СК 27, 28, 29 ОЭК видеонаблюдения (камер) (фиг. 4) и записи в память 31 матриц  положения СК 27, 28, 29
положения СК 27, 28, 29  соответственно в СК 24, 25, 26 ОБ 1, ПБ 4 и ЛБ 5 (фиг. 3)
соответственно в СК 24, 25, 26 ОБ 1, ПБ 4 и ЛБ 5 (фиг. 3)
где 

Модуль 38 (фиг. 5) комплексирования тактической и навигационной информации (МКТНИ) выполнен с возможностью:
1) в режиме приема целеуказания:
- считывания из памяти 31 трехмерных координат  целей, важных объектов, точек тактических и навигационных знаков и информации о их типах;
целей, важных объектов, точек тактических и навигационных знаков и информации о их типах;
- преобразования координат целей или важных объектов, а также точек тактических и навигационных знаков из СК 21 OWXWYWZW (Фиг. 3) к СК 27, 28, 29  камер ЛБ 5, ОБ 1 и ПБ 4 (Фиг. 4), путем применения следующих математических операций:
камер ЛБ 5, ОБ 1 и ПБ 4 (Фиг. 4), путем применения следующих математических операций:

- определения целей или важных объектов, которые могут находиться в зоне прямой видимости или зоне интересов ИОПСН, для чего вычисленные координаты  в СК 28
в СК 28  камеры ОБ 1 преобразуются в дальности
камеры ОБ 1 преобразуются в дальности  согласно выражению
согласно выражению  а затем сравниваются с величинами LPV и LINT соответственно, означающие дистанции прямой видимости и интересов, задаваемые оператором или вычисляемые автоматически на основании технических данных ИОПСН, ландшафта местности и поставленной боевой задачи;
а затем сравниваются с величинами LPV и LINT соответственно, означающие дистанции прямой видимости и интересов, задаваемые оператором или вычисляемые автоматически на основании технических данных ИОПСН, ландшафта местности и поставленной боевой задачи;
- формирования отдельно для j-ых камер ЛБ 5, ОБ 1 и ПБ 4 для каждой g-ой цели или важного объекта, дистанция  до которых меньше значения LPV, согласно их типу дополнительных точек, характеризующих форму и размер их областей выделения, для чего для каждой дополнительной точки записываются координаты
до которых меньше значения LPV, согласно их типу дополнительных точек, характеризующих форму и размер их областей выделения, для чего для каждой дополнительной точки записываются координаты  где s - количество дополнительных координат. При чем количество s дополнительных координат и соответственно их взаимное положение формируется согласно встроенному алгоритму для каждого типа цели отдельно. Неограничивающим примером формирования дополнительных точек является чертеж, представленный на фиг. 6, где показано, что для наземных подвижных объектов область выделения может задаваться в виде четырех дополнительных точек, которые оконтуривают цель прямоугольной формой, для воздушных целей могут формироваться три дополнительные точки, располагаемые по вершинам равностороннего треугольника и т.п. для каждого типа цели или объекта;
где s - количество дополнительных координат. При чем количество s дополнительных координат и соответственно их взаимное положение формируется согласно встроенному алгоритму для каждого типа цели отдельно. Неограничивающим примером формирования дополнительных точек является чертеж, представленный на фиг. 6, где показано, что для наземных подвижных объектов область выделения может задаваться в виде четырех дополнительных точек, которые оконтуривают цель прямоугольной формой, для воздушных целей могут формироваться три дополнительные точки, располагаемые по вершинам равностороннего треугольника и т.п. для каждого типа цели или объекта;
- преобразования с последующим сохранением в память координат  целей или важных объектов, координат точек тактических и навигационных знаков, которые находятся в пределах дальности LINT интереса, а также координат
целей или важных объектов, координат точек тактических и навигационных знаков, которые находятся в пределах дальности LINT интереса, а также координат  точек областей интереса, находящихся в пределах дальности LPV прямой видимости, из трехмерных метрических координат в СК 27, 28, 29
точек областей интереса, находящихся в пределах дальности LPV прямой видимости, из трехмерных метрических координат в СК 27, 28, 29  камер ЛБ 5, ОБ 1 и ПБ 4 в плоские пиксельные координаты
камер ЛБ 5, ОБ 1 и ПБ 4 в плоские пиксельные координаты  в СК изображений Imgj j-ых камер ЛБ 5, ОБ 1 и ПБ 4 (Фиг. 4) путем вычисления векторов
в СК изображений Imgj j-ых камер ЛБ 5, ОБ 1 и ПБ 4 (Фиг. 4) путем вычисления векторов  согласно выражению:
согласно выражению:

где

- полиномы q-го порядка обратного преобразования, вычисляемые согласно выражениям (5) и (6) соответственно;
2) в режиме передачи целеуказания:
- считывания из памяти вектора пиксельных координат  g-ой обнаруженной цели или важных объекта на изображении ImgОБ камеры ОБ 1;
g-ой обнаруженной цели или важных объекта на изображении ImgОБ камеры ОБ 1;
- выработки сигналов наведения центральной прицельной марки (ЦПМ) ОБ 1 на указанные g-ую цель до момента, когда пиксельные координаты ЦПМ в поле зрении камеры ОБ 1 не станут равны пиксельным координатам  g-ой цели;
g-ой цели;
- выработки сигналов управления на лазерный дальномер ОБ 1 для измерение дальности  до g-ой цели;
до g-ой цели;
- вычисления и сохранения в память 31 трехмерных координат  цели в СК 21 OWXWYWZW (Фиг. 3) путем:
цели в СК 21 OWXWYWZW (Фиг. 3) путем:
- вычисления приведенных пиксельных координат g-ой цели

- с применяем полиномов  прямого преобразования согласно выражений (3) и (4), вычисления вектора
прямого преобразования согласно выражений (3) и (4), вычисления вектора  трехмерных метрических координат изображения g-ой цели в плоскости изображения ImgОБ камеры ОБ 1
трехмерных метрических координат изображения g-ой цели в плоскости изображения ImgОБ камеры ОБ 1

- вычисления вектора  трехмерных метрических координат g-ой цели в СК 28 камеры ОБ 1
трехмерных метрических координат g-ой цели в СК 28 камеры ОБ 1

- вычисления и записи в память 31 для дальнейшего считывания аппаратурой 13 и НС 14 вектора  координат g-ой цели в СК 21 OWXWYWZW согласно выражению:
координат g-ой цели в СК 21 OWXWYWZW согласно выражению:

ИОПСН работает следующим образом.
Оператор ИОПСН, например, командир бронеобъекта, по изображению с экрана ВСУ 9 или через трехмерное представление через НСВ 10 осуществляет наблюдение окружающей местности и ориентирование на ней, самостоятельно или с применением системы автоматического визуального обнаружения проводит поиск, обнаружение и распознавание целей и важных объектов. Воздействуя на ПУ 12, оператор меняет угловую ориентацию ОБ 1, воздействуя на ПнУ 8, оператор задает команды управления для измерительного приложения 32 БУ 7.
Шина данных 11 осуществляет высокоскоростной обмен информацией между БУ 7, аппаратурой 13, НС 14, ПУ 12, ЛБ 5, ОБ 6, ПБ 4, ДКу 18, ДКр 19, ДТг 20.
Аппаратура 13 принимает и передает в ЕСУ ТЗ тактическую информацию с координатами и типами обнаруженных целей, координатами точек тактических знаков.
НС 14 принимает тактическую информацию с аппаратуры 13, по сигналам с Ант. 17, Эл. Комп. 16 осуществляет определение и ориентацию положения образца бронетанкового вооружения на цифровой карте, преобразует координаты точек тактических знаков в графические тактические знаки и выводит на КГП 15 цифровую карту местности с графическим наложением на нее тактических знаков, а также навигационных знаков об окружающих географических объектах.
Датчики ДКу 18, ДКр 19, ДТг 20 передают в БУ 7 сигналы с текущей информацией об угловой ориентации СК 22 OОВXОВYОВZОВ образца БТВ относительно осей мировой СК 21 OWXWYWZW.
По команде оператора или по команде с системы автоматического визуального обнаружения подается команда на запуск измерительного приложения 32. При этом МОД 33 осуществляет информационный обмен данными с шиной данных 11, постоянно записывает в память 31 текущие кадры цифровых изображений Jmgj с камер ЛБ 5, ОБ 1, ПБ 4, а также значений углов с датчиков 18, 19, 20 и Эл. Комп. 16 НС 14.
MAC 36 осуществляет захват и автоматическое сопровождение g-ой цели на изображении камеры ЛБ 5, ОБ 1 или ПБ 4, на котором она была обнаружены. Кроме этого MAC 36 осуществляет поиск изображений сопровождаемой цели на всех прочих изображениях ЛБ 5, ОБ 1 и ПБ 4. В частности, MAC 36 считывает из памяти 31 j-го изображения и при поступлении команды захвата на сопровождение осуществляет подготовку для сопровождения и с приходом очередного кадра изображений проводит поиск сопровождаемого объекта на изображениях камер ЛБ 5, ОБ 1 и ПБ 4. Для каждого кадра изображений j-ых камер осуществляется определение наиболее вероятного положения сопровождаемого объекта. Информация о положении сопровождаемого объекта для каждого изображения j-ой камеры передается оператору на ВСУ 9, НСВ 10 и сохраняется в памяти 31. При этом в памяти 31 для каждой j-ой камеры ЛБ 5, ОБ 1 и ПБ 4 сохраняются векторы  пиксельных координат g-го объекта. Кроме этого MAC формирует и записывает в память 31 отдельно для ЛБ 5, ОБ 1 и ПБ 4 для каждой цели или важного объекта согласно их типу векторы
пиксельных координат g-го объекта. Кроме этого MAC формирует и записывает в память 31 отдельно для ЛБ 5, ОБ 1 и ПБ 4 для каждой цели или важного объекта согласно их типу векторы  с пиксельными координатами дополнительных точек 39.1 (Фиг. 6), характеризующих форму и размер их областей выделения.
с пиксельными координатами дополнительных точек 39.1 (Фиг. 6), характеризующих форму и размер их областей выделения.
МИ 35 считывает из памяти 31 векторы  и
и  пиксельных координат целей, важных объектов, областей их выделения, точек тактических и навигационных знаков, а также информации о том, находятся ли они в зоне прямой видимости (в пределах расстояния LPV) или в зоне интересов (в пределах расстояния LINT). Если g-ая цель или важный объект находятся в зоне прямой видимости, то МИ 35 осуществляет графическое выделение их областей выделения согласно пиксельных координат
пиксельных координат целей, важных объектов, областей их выделения, точек тактических и навигационных знаков, а также информации о том, находятся ли они в зоне прямой видимости (в пределах расстояния LPV) или в зоне интересов (в пределах расстояния LINT). Если g-ая цель или важный объект находятся в зоне прямой видимости, то МИ 35 осуществляет графическое выделение их областей выделения согласно пиксельных координат  дополнительных точек 39.1 (Фиг. 6) выделения. Если g-ая цель или важный объект находятся в пределах зоны интересов, то МИ 35 по пиксельным координатам
дополнительных точек 39.1 (Фиг. 6) выделения. Если g-ая цель или важный объект находятся в пределах зоны интересов, то МИ 35 по пиксельным координатам  осуществляет графическое представление тактических знаков 39, 40 (Фиг. 6), согласно их типу. Кроме этого МИ 35 по пиксельным координатам точек 39, 40 тактических и навигационных 42 знаков, находящихся в пределах зоны интересов, осуществляет графическое их представление. Также МИ 35 осуществляет графическое отображение дополнительной графической информации через формы управления на экране ВСУ 9 или НСВ 10. При чем количество одновременно отображаемой графической информации МИ 35 в любой момент времени может быть изменено оператором ИОПСН.
осуществляет графическое представление тактических знаков 39, 40 (Фиг. 6), согласно их типу. Кроме этого МИ 35 по пиксельным координатам точек 39, 40 тактических и навигационных 42 знаков, находящихся в пределах зоны интересов, осуществляет графическое их представление. Также МИ 35 осуществляет графическое отображение дополнительной графической информации через формы управления на экране ВСУ 9 или НСВ 10. При чем количество одновременно отображаемой графической информации МИ 35 в любой момент времени может быть изменено оператором ИОПСН.
МКл 34 по команде оператор определяет данные внешней и внутренней калибровки камер ОБ 1, ЛБ 5 и ПБ 4.
Внутреннюю и внешнюю калибровку проводят с применением калибровочного изображения с нанесенными на него геометрическими примитивами, расположенными на известных расстояниях и с определенным расположением друг относительно друга путем их автоматического распознавания и соответствующей математической обработки. При чем проводится сначала внутренняя калибровка отдельно каждого ОЭК, а затем - внешняя калибровка. При этом калибровочное изображение, располагаясь перед бронеобъектом на некотором удалении, остается неподвижен, а башня и ОБ плавно вращается на корпусе в разных направлениях до окончания проведения данной процедуры.
Калибровку выполняют во время завершающих этапов процесса изготовления ИОПСН, например, после ее сборки, технического обслуживания при проведении ее настройки и проверки работоспособности. Дополнительно калибровку могут выполнять непосредственно перед боевым применением ИОПСН в условиях окружающей среды, которые могут повлиять на геометрию системы (например, из-за сокращения или расширения материалов) и, соответственно, расположение камер ОБ 1, ЛБ 5 и ПБ 4.
МПП 37 считывает из памяти 31 текущие значения координат  угла на север
угла на север  углов
углов  координаты
координаты  и текущие значений углов
и текущие значений углов  координаты
координаты  текущие значения углов
текущие значения углов  координаты
координаты  и значения углов
и значения углов  координаты
координаты  и значения углов
и значения углов  координаты
координаты  и значения углов
и значения углов  . На основе считанных данных МПП 37 рассчитывает и записывает в память 31 матрицы
. На основе считанных данных МПП 37 рассчитывает и записывает в память 31 матрицы 
МКТНИ 38 по команде оператора на прием внешнего целеуказания считывает из памяти 31 трехмерные координаты  целей, важных объектов, точек тактических 39, 40, 43 и навигационных 41, 42 знаков и информации о их типах, вычисляет векторы
целей, важных объектов, точек тактических 39, 40, 43 и навигационных 41, 42 знаков и информации о их типах, вычисляет векторы  , определяет цели или важные объекты, которые могут находиться в зоне прямой видимости или зоне интересов ИОПСН, формирует отдельно для j-ых камер ЛБ 5, ОБ 1 и ПБ 4 для каждой g-ой цели или важного объекта, находящихся в зоне прямой видимости, согласно их типу дополнительных точек 39.1, характеризующих форму и размер их областей выделения, преобразует с сохранением в память 31 координат
, определяет цели или важные объекты, которые могут находиться в зоне прямой видимости или зоне интересов ИОПСН, формирует отдельно для j-ых камер ЛБ 5, ОБ 1 и ПБ 4 для каждой g-ой цели или важного объекта, находящихся в зоне прямой видимости, согласно их типу дополнительных точек 39.1, характеризующих форму и размер их областей выделения, преобразует с сохранением в память 31 координат  целей или важных объектов, координат точек тактических 39, 40, 43 и навигационных 41, 42 знаков, которые находятся в пределах зоны интереса, а также координат
целей или важных объектов, координат точек тактических 39, 40, 43 и навигационных 41, 42 знаков, которые находятся в пределах зоны интереса, а также координат  точек 39.1 областей интереса, находящихся в пределах дальности прямой видимости, из трехмерных метрических координат в СК 27, 28, 29
точек 39.1 областей интереса, находящихся в пределах дальности прямой видимости, из трехмерных метрических координат в СК 27, 28, 29  камер ЛБ 5, ОБ 1 и ПБ 4 в плоские пиксельные координаты
камер ЛБ 5, ОБ 1 и ПБ 4 в плоские пиксельные координаты  и
и  в СК изображений Imgj j-ых камер ЛБ 5, ОБ 1 и ПБ 4 путем вычисления векторов
в СК изображений Imgj j-ых камер ЛБ 5, ОБ 1 и ПБ 4 путем вычисления векторов 
По команде оператора на передачу внешнего целеуказания МКТНИ 34 считывает из памяти 31 вектор пиксельных координат  g-ой обнаруженной цели или важного объекта на изображении ImgОБ ОБ 1, вырабатывает сигналы наведения ЦПМ ОЭК ОБ 1 на указанную g-ую цель до момента, когда пиксельные координаты ЦПМ в поле зрении камеры ОБ 1 не станут равны пиксельным координатам
g-ой обнаруженной цели или важного объекта на изображении ImgОБ ОБ 1, вырабатывает сигналы наведения ЦПМ ОЭК ОБ 1 на указанную g-ую цель до момента, когда пиксельные координаты ЦПМ в поле зрении камеры ОБ 1 не станут равны пиксельным координатам  g-ой цели, вырабатывает сигналы управления на дальномер ОБ 1 для измерения дальности
g-ой цели, вырабатывает сигналы управления на дальномер ОБ 1 для измерения дальности  до g-ой цели, вычисляет и сохраняет в память 31 вектор
до g-ой цели, вычисляет и сохраняет в память 31 вектор  трехмерных координат g-ой цели в СК 21 OWXWYWZW..
трехмерных координат g-ой цели в СК 21 OWXWYWZW..
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| СПОСОБ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ ЗЕНИТНО-РАКЕТНОГО ВООРУЖЕНИЯ СО СРЕДСТВАМИ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ | 2023 |
|
RU2830505C1 |
| СПОСОБ ВНУТРЕННЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2712367C2 |
| Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола | 2020 |
|
RU2725677C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ИХ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ | 2018 |
|
RU2697822C2 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| Способ определения положения области поиска соответствий на дисторсионно-искажённых изображениях | 2020 |
|
RU2740435C2 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ УПРАВЛЕНИЯ ОГНЕМ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2014 |
|
RU2603750C2 |
Изобретение относится к оптико-электронным системам наблюдения и может быть использовано в области вооружения и военной техники, в частности в системах управления огнем образцов бронетанкового вооружения. Система наблюдения содержит оптический блок (ОБ), блок управления (БУ) с видеосмотровым устройством и панелью управления, пульт управления, приемопередающую аппаратуру, навигационную систему с антенной, электронным компасом и картографическим планшетом (КГП), графическое отображение на электронной карте КГП положения и ориентации объекта, датчики курса, крена и тангажа. К ОБ дополнительно подсоединяются идентичные друг другу левый и правый оптические блоки. БУ оснащается нашлемной системой визуализации и обрабатывающей системой. Измерительное приложение обрабатывающей системы БУ содержит программно-исполняемые модули или команды. Модуль обмена данными выполнен с возможностью приема и передачи данных. Модуль калибровки выполнен с возможностью определения данных внешней и внутренней калибровки камер оптических блоков. Модуль интерфейса выполнен с возможностью создания форм управления изображением. Повышается надежность. 7 ил.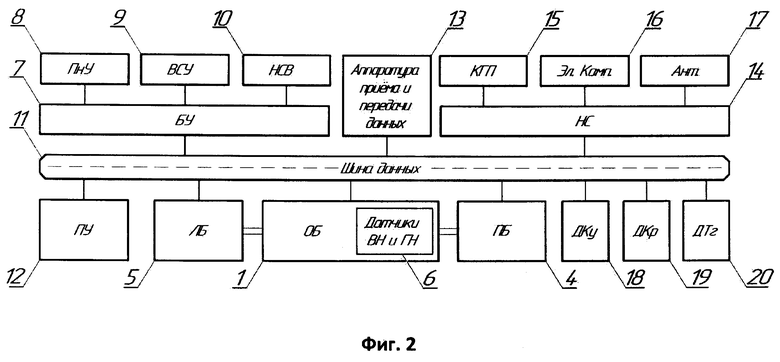
Информационная обзорно-панорамная система наблюдения (ИОПСН) для образцов бронетанкового вооружения, включающая соединенные с высокоскоростной шиной данных: оптический блок (ОБ) с оптико-электронными каналами (ОЭК) узкого и среднего полей зрения, дальномером, независимой двухплоскостной стабилизацией, вертикальным приводом, обеспечивающим поворот каналов по крайней мере от минус 15 до плюс 45 градусов, горизонтальным приводом, обеспечивающим вращение платформы на 360 градусов без ограничения числа оборотов в любую сторону, датчиками вертикального и горизонтального наведения, обеспечивающими получение текущих значений углов βОБ, αОБ отклонения ОБ относительно подвижного основания, и соответственно отклонения подвижного основания относительно неподвижного основания прицела, которым обеспечивается его крепление на образце вооружения; блок управления (БУ) с видеосмотровым устройством (ВСУ) и панелью управления (Пну); пульт управления (ПУ); приемопередающую аппаратуру (далее аппаратуры), обеспечивающую информационный обмен тактической информацией по каналам связи единой системы управления тактическим звеном, в частности, аппаратура принимает координаты  и типы обнаруженных g-ых целей, важных объектов, координаты точек тактических знаков, отражающих тактические задачи подразделения, положение соседей, противника, районы сосредоточения, районы развертывания, районы минных полей и прочую тактическую информацию; навигационную систему (НС) с антенной (Ант.) и электронным компасом (Эл. Комп.) и картографическим планшетом (КГП), обеспечивающую: определение текущих координат
и типы обнаруженных g-ых целей, важных объектов, координаты точек тактических знаков, отражающих тактические задачи подразделения, положение соседей, противника, районы сосредоточения, районы развертывания, районы минных полей и прочую тактическую информацию; навигационную систему (НС) с антенной (Ант.) и электронным компасом (Эл. Комп.) и картографическим планшетом (КГП), обеспечивающую: определение текущих координат  бронеобъекта и углов его текущей ориентации, в частности угла
бронеобъекта и углов его текущей ориентации, в частности угла  относительно направления на север; графическое отображение на электронной карте КГП положения и ориентации бронеобъекта; прием по каналу шины данных с аппаратуры данных об положении тактических знаков и их графическое отображение на электронной карте КГП; формирование навигационных знаков и отображение их на электронной карте местности; вычисление и передачу в БУ для каждого из навигационных знаков трехмерных координат точек, описывающих их форму и положение на электронной карте местности; датчики курса (ДКу), крена (ДКр) и тангажа (ДТг), обеспечивающие получение данных о текущих значениях углов
относительно направления на север; графическое отображение на электронной карте КГП положения и ориентации бронеобъекта; прием по каналу шины данных с аппаратуры данных об положении тактических знаков и их графическое отображение на электронной карте КГП; формирование навигационных знаков и отображение их на электронной карте местности; вычисление и передачу в БУ для каждого из навигационных знаков трехмерных координат точек, описывающих их форму и положение на электронной карте местности; датчики курса (ДКу), крена (ДКр) и тангажа (ДТг), обеспечивающие получение данных о текущих значениях углов  ориентации осей СК OОВXОВYОВZОВ образца вооружения относительно осей мировой СК OWXWYWZW, а также прочие подсистемы и датчики, обеспечивающие эффективную работу ИОПСН и выполнение ей всего перечня функциональных возможностей, но не связанные напрямую с достигаемыми техническими результатами заявленного изобретения, такими системами и датчиками, например, могут быть система управления и стабилизации дистанционной пулеметной установкой, датчик температуры, датчик ветра, и отличающаяся тем, что:
ориентации осей СК OОВXОВYОВZОВ образца вооружения относительно осей мировой СК OWXWYWZW, а также прочие подсистемы и датчики, обеспечивающие эффективную работу ИОПСН и выполнение ей всего перечня функциональных возможностей, но не связанные напрямую с достигаемыми техническими результатами заявленного изобретения, такими системами и датчиками, например, могут быть система управления и стабилизации дистанционной пулеметной установкой, датчик температуры, датчик ветра, и отличающаяся тем, что:
к ОБ дополнительно подсоединяются идентичные друг другу левый и правый оптические блоки (ЛБ и ПБ) информационно соединенных через шину данных с БУ, имеющие поля зрения, близкие к человеческой зрительной системе, размещаемые параллельно на одной оси слева и справа от основного ОБ и механически сопряженные с ним;
БУ дополнительно оснащается информационно соединенной с БУ нашлемной системой визуализации (НСВ) и обрабатывающей системой, являющейся удаленным компьютером, таким как рабочая станция, персональный компьютер или ноутбук, и содержащей размещенные на машиночитаемом носителе память для хранения данных и измерительное приложение, содержащее, в свою очередь, программно-исполняемые модули или команды, обеспечивающие прием, обработку и передачу двух парных изображений или одного синтезированного стереоизображения на НСВ оператора, выполненную в виде очков виртуальной или дополненной реальности с одним или двумя микродисплеями высокого разрешения и двумя оптическими системами для левого и правого глаза оператора, причем если НСВ исполняется по типу очков дополненной реальности, то она может содержать один или два полупрозрачных экрана, позволяющих видеть оператору транслируемые изображения с микродисплеев в режиме дополненной реальности;
измерительное приложение обрабатывающей системы БУ содержит программно-исполняемые модули или команды, а именно:
модуль обмена данными, выполненный с возможностью приема и передачи данных через соответствующие интерфейс и протоколы с шиной данных, в частности, МОД при подключении к шине данных обнаруживает проводное соединение и принимает цифровые изображения с камер ОБ, ЛБ, ПБ, текущие данные с датчиков ДКу, ДКр и ДТг, данные с аппаратуры, НС, и ПУ и передает их для хранения в память;
модуль калибровки, выполненный с возможностью определения данных внешней и внутренней калибровки камер оптических блоков, проводимые во время завершающих этапов процесса изготовления ИОПСН, например после ее сборки, технического обслуживания при проведении ее настройки и проверки работоспособности, причем под внутренней калибровкой ОЭК ОБ, ПБ или ЛБ понимается процесс описания полиномами  q-го порядка взаимосвязей между вертикальными и горизонтальным углами
q-го порядка взаимосвязей между вертикальными и горизонтальным углами  на интересующий g-ый объект относительно j-ой камеры с соответствующими значениями его пиксельных координат
на интересующий g-ый объект относительно j-ой камеры с соответствующими значениями его пиксельных координат  на принимаемых с j-ой камеры цифровых изображениях Imgj, а именно:
на принимаемых с j-ой камеры цифровых изображениях Imgj, а именно:




где j - индекс камеры, соответственно, ОБ, ЛБ или ПБ;
 - приведенные пиксельные координаты изображения g-го объекта на изображении Imgj камеры j-го оптического блока;
- приведенные пиксельные координаты изображения g-го объекта на изображении Imgj камеры j-го оптического блока;
Nj. и Мj - горизонтальное и вертикальное разрешение изображения;
c0,c1,c2,…cq и d0,d1,d2,…dq - полиномиальные коэффициенты прямого преобразования функций  соответственно;
соответственно;
 - полиномиальные коэффициенты обратного преобразования, соответственно, функций
- полиномиальные коэффициенты обратного преобразования, соответственно, функций  q-го порядка;
q-го порядка;
 - углы на интересующий g-ый объект в горизонтальной и вертикальной плоскостях относительно оптической оси объектива;
- углы на интересующий g-ый объект в горизонтальной и вертикальной плоскостях относительно оптической оси объектива;
под внешней калибровкой понимают процесс определения координат и взаимных ориентаций системы координат (СК)  камер, СК OjXjYjZj оптических блоков, СК OПXПYПZП основания прицела, сравнение полученных значений со значениями из конструкторской документации на образец вооружения и значениями с датчиков горизонтального и вертикального наведения ОБ, а также - датчиков ДКу, ДКр и ДТг, уточнение с сохранением в память соответствующих поправок;
камер, СК OjXjYjZj оптических блоков, СК OПXПYПZП основания прицела, сравнение полученных значений со значениями из конструкторской документации на образец вооружения и значениями с датчиков горизонтального и вертикального наведения ОБ, а также - датчиков ДКу, ДКр и ДТг, уточнение с сохранением в память соответствующих поправок;
модуль интерфейса, выполненный с возможностью создания форм управления изображением для отображения через ВСУ или НСВ оператора и содержащий команды, позволяющие оператору через ПнУ взаимодействовать с измерительным приложением, причем формы управления изображением содержат различные виды, которые обеспечивают возможность отображения видеоданных, графическое отображение областей выделения, тактических и навигационных знаков, взаимодействие пользователя с видеоданными, указания целей или важных объектов, которых необходимо взять на автосопровождение и провести целеуказание, а также отображение прочей технической информации о состоянии и режимах работы прицельно-наблюдательного комплекса образца вооружения, например графических маркеров тактических знаков, навигационных знаков согласно их типу, графическое представление областей выделения, причем количество одновременно отображаемой графической информации модулем интерфейса в любой момент времени может быть изменено оператором ИОПСН, кроме того, модуль интерфейса поддерживает возможность вывода в полях зрения ЛБ, ПБ по типу «картинка в картинке» поля зрения камеры ОБ;
модуль автосопровождения, выполненный с возможностью захвата и автоматического сопровождения указанных оператором ИОПСН, а также поступивших по каналам целеуказания или обнаруженных в результате работы системы автоматического обнаружения целей и важных объектов и записи информации сопровождения о них, в частности, векторов  с пиксельными координатами целей и
с пиксельными координатами целей и  с пиксельными координатами областей выделения целей, в память обрабатывающей системы;
с пиксельными координатами областей выделения целей, в память обрабатывающей системы;
модуль пространственного положения, выполненный с возможностью:
считывания из памяти текущих значений координат  угла на север
угла на север  углов
углов  и записи в память матрицы
и записи в память матрицы  положения СК OОВXОВYОВ образца вооружения в мировой СК OWXWYWZW
положения СК OОВXОВYОВ образца вооружения в мировой СК OWXWYWZW
где 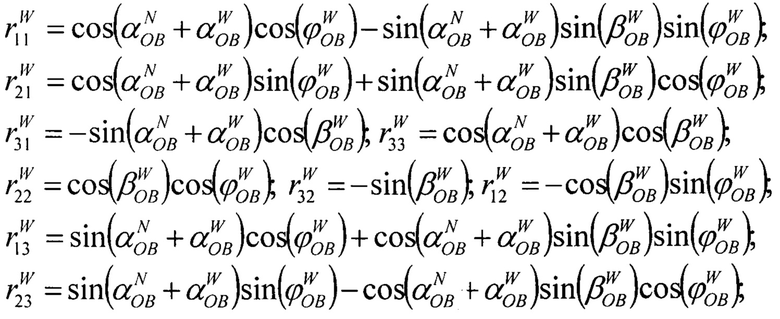
считывания из памяти координат  и текущих значений углов
и текущих значений углов  ориентации основания прицела и записи в память матрицы
ориентации основания прицела и записи в память матрицы  положения СК OПXПYПZП основания прицела в СК OОВXОВYОВ
положения СК OПXПYПZП основания прицела в СК OОВXОВYОВ
где 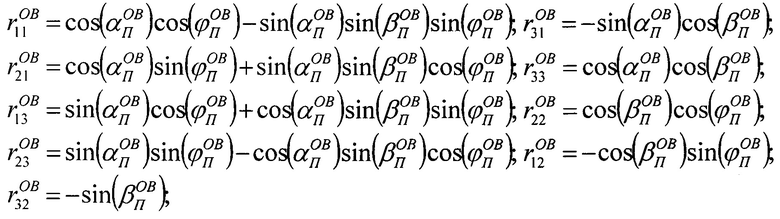
считывания из памяти координат  положения ОБ прицела и текущих значений углов
положения ОБ прицела и текущих значений углов  его ориентации и записывает в память матрицы
его ориентации и записывает в память матрицы  положения СК ООБХОБYОБZОБ ОБ в СК OПXПYПZП основания прицела
положения СК ООБХОБYОБZОБ ОБ в СК OПXПYПZП основания прицела
считывания из памяти координат  и значений углов
и значений углов  ориентации ПБ и записи в память матрицы
ориентации ПБ и записи в память матрицы  положения СК ОПБХПБYПБZПБ ПБ в СК ООБХОБYОБZОБ ОБ
положения СК ОПБХПБYПБZПБ ПБ в СК ООБХОБYОБZОБ ОБ
где 
считывания из памяти координат  и значений углов
и значений углов  ориентации ЛБ и записи в память матрицы
ориентации ЛБ и записи в память матрицы  положения СК ОЛБХЛБYЛБZЛБ ЛБ в СК ООБХОБYОБZОБ ОБ
положения СК ОЛБХЛБYЛБZЛБ ЛБ в СК ООБХОБYОБZОБ ОБ
где 
считывания из памяти координат  и значений углов
и значений углов  ориентации СК ОЭК видеонаблюдения и записи в память матриц
ориентации СК ОЭК видеонаблюдения и записи в память матриц  положения СК
положения СК  соответственно в СК ОЛБХЛБYЛБZЛБ ОБ, ОЛБХЛБYЛБZЛБ ЛБ и ОПБХПБYПБZПБ ПБ
соответственно в СК ОЛБХЛБYЛБZЛБ ОБ, ОЛБХЛБYЛБZЛБ ЛБ и ОПБХПБYПБZПБ ПБ
где 
модуль комплексирования тактической и навигационной информации выполненный с возможностью:
в режиме приема целеуказания:
считывания из памяти трехмерных координат  целей, важных объектов, точек тактических и навигационных знаков и информации об их типах;
целей, важных объектов, точек тактических и навигационных знаков и информации об их типах;
преобразования координат целей или важных объектов, а также точек тактических и навигационных знаков из СК OWXWYwZW к СК  камер ЛБ, ОБ и ПБ путем применения следующих математических операций:
камер ЛБ, ОБ и ПБ путем применения следующих математических операций:


определения целей или важных объектов, которые могут находиться в зоне прямой видимости или зоне интересов ИОПСН, для чего вычисленные координаты  камеры ОБ преобразуются в дальности
камеры ОБ преобразуются в дальности  согласно выражению
согласно выражению  а затем сравниваются с величинами LPV и LINT, соответственно, означающие дистанции прямой видимости и интересов, задаваемые оператором или вычисляемые автоматически на основании технических данных ИОПСН, ландшафта местности и поставленной боевой задачи;
а затем сравниваются с величинами LPV и LINT, соответственно, означающие дистанции прямой видимости и интересов, задаваемые оператором или вычисляемые автоматически на основании технических данных ИОПСН, ландшафта местности и поставленной боевой задачи;
формирования отдельно для j-ых камер ЛБ, ОБ и ПБ для каждой g-ой цели или важного объекта, дистанция  до которых меньше значения LPV, согласно их типу дополнительных точек, характеризующих форму и размер их областей выделения, для чего для каждой дополнительной точки записываются координаты
до которых меньше значения LPV, согласно их типу дополнительных точек, характеризующих форму и размер их областей выделения, для чего для каждой дополнительной точки записываются координаты где s - количество дополнительных координат, причем количество s дополнительных координат и соответственно их взаимное положение формируются согласно встроенному алгоритму для каждого типа цели отдельно;
где s - количество дополнительных координат, причем количество s дополнительных координат и соответственно их взаимное положение формируются согласно встроенному алгоритму для каждого типа цели отдельно;
преобразования с последующим сохранением в память координат  целей или важных объектов, координат точек тактических и навигационных знаков, которые находятся в пределах дальности LINT интереса, а также координат
целей или важных объектов, координат точек тактических и навигационных знаков, которые находятся в пределах дальности LINT интереса, а также координат  точек областей интереса, находящихся в пределах дальности LPV прямой видимости, из трехмерных метрических координат в СК
точек областей интереса, находящихся в пределах дальности LPV прямой видимости, из трехмерных метрических координат в СК  камер ЛБ, ОБ и ПБ в плоские пиксельные координаты
камер ЛБ, ОБ и ПБ в плоские пиксельные координаты  в СК изображений Imgj j-ых камер ЛБ, ОБ и ПБ путем вычисления векторов
в СК изображений Imgj j-ых камер ЛБ, ОБ и ПБ путем вычисления векторов  согласно выражению:
согласно выражению:

где

полиномы q-го порядка обратного преобразования, вычисляемые согласно выражениям (1) и (2) соответственно;
в режиме передачи целеуказания:
считывания из памяти вектора пиксельных координат  g-ой обнаруженной цели или важных объекта на изображении ImgОБ камеры ОБ;
g-ой обнаруженной цели или важных объекта на изображении ImgОБ камеры ОБ;
выработки сигналов наведения центральной прицельной марки (ЦПМ) ОБ на указанные g-ую цель до момента, когда пиксельные координаты ЦПМ в поле зрении камеры ОБ не станут равны пиксельным координатам  g-ой цели;
g-ой цели;
выработки сигналов управления на дальномер ОБ для измерение дальности  до g-ой цели;
до g-ой цели;
вычисления и сохранения в память трехмерных координат  g-ой цели в СК OWXWYWZW путем вычисления приведенных пиксельных координат g-ой цели
g-ой цели в СК OWXWYWZW путем вычисления приведенных пиксельных координат g-ой цели  с применением полиномов
с применением полиномов  прямого преобразования согласно выражениям (3) и (4), вычисления вектора
прямого преобразования согласно выражениям (3) и (4), вычисления вектора  трехмерных метрических координат изображения g-ой цели в плоскости изображения ImgOБ камеры ОБ
трехмерных метрических координат изображения g-ой цели в плоскости изображения ImgOБ камеры ОБ  вычисления вектора
вычисления вектора  трехмерных метрических координат g-ой цели в СК камеры ОБ вычисления и записи в память для дальнейшего считывания аппаратурой и НС вектора
трехмерных метрических координат g-ой цели в СК камеры ОБ вычисления и записи в память для дальнейшего считывания аппаратурой и НС вектора  координат g-ой цели в СК OWXWYWZW.
координат g-ой цели в СК OWXWYWZW.
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| Способ двухэтапного ранжирования воздушных целей по степени опасности в радиолокационных информационно-управляющих системах | 2018 |
|
RU2686482C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ОРУДИЯ | 2011 |
|
RU2466343C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| WO 2017017536 А1, 02.02.2017. | |||

