Настоящее изобретение относится к способу и устройству для неразрушающего испытания материала испытываемого объекта.
При неразрушающем контроле материала выявляются дефекты в испытуемом объекте, например в металлической заготовке.
Согласно одному из вариантов способа контроля на испытуемый объект воздействуют периодическим переменным электромагнитным полем излучающей катушки, запитываемой синусоидальным током. Наводимые этим полем в объекте вихревые токи индуцируют в датчике, например, выполненном в виде катушки или узла катушек, периодический электрический сигнал несущей частоты, амплитуда и/или фаза которого характерным образом модулируются при наличии в испытуемом объекте дефекта, попавшего в зону измерения датчика.
При контроле материала испытуемый объект может двигаться относительно датчика с переменной скоростью, например, когда объект ускоряется или тормозится относительно датчика. Спектр возникающего в датчике сигнала, вызванного дефектом испытуемого объекта, зависит от относительной скорости объекта и датчика, поэтому сигнал датчика обычно приходится пропускать через связанные с относительной скоростью наборы фильтров, что вызывает дополнительные издержки.
Аналогичные проблемы возникают и в тех вариантах контроля, в которых на испытуемый объект не воздействуют сигналом несущей частоты, так как в этом случае спектр сигнала датчика зависит от относительной скорости.
В документе WO 2006/007826 А1 раскрыт способ неразрушающего и бесконтактного обнаружения дефектов в испытуемом объекте, движущемся относительно датчика с переменной скоростью. В этом способе на испытуемый объект воздействуют периодическим переменным электромагнитным полем излучателя, а датчик регистрирует периодический электрический сигнал несущей частоты, амплитуда и/или фаза которого модулируются при наличии в испытуемом объекте дефекта, причем каскад аналого-цифрового преобразователя запускается n-м целым числом периодов колебаний несущей частоты, при этом n выбирают, помимо прочего, в зависимости от указанной относительной скорости.
В основе настоящего изобретения лежит задача создания таких способа и устройства для неразрушающего испытания материала испытуемого объекта, которые позволяют надежно и просто осуществлять контроль материала при переменных относительных скоростях испытуемого объекта и датчика.
Решение этой задачи достигается разработкой способа по п. 1 и устройства по п. 7 формулы настоящего изобретения.
Способ неразрушающего контроля материала испытуемого объекта, движущегося относительно датчика с переменной скоростью, содержит следующие этапы. С помощью датчика регистрируют сигнал датчика, например ток и/или напряжение датчика; с помощью аналого-цифрового преобразователя преобразуют сигнал датчика в оцифрованный сигнал датчика в форме последовательности цифровых слов с заранее заданной, в частности постоянной, частотой повторения слов; с помощью n-каскадного прореживателя проводят n-ступенчатое, с n≥2, прореживание частоты повторения слов оцифрованного сигнала датчика или выделенного из оцифрованного сигнала датчика цифрового детектированного сигнала, причем каждый каскад прореживателя выдает цифровой выходной сигнал с уменьшенной, например, на одну (1) октаву частотой повторения слов, однако при постоянной длине слова; выбирают выходной сигнал одного из n каскадов прореживателя в зависимости от мгновенной относительной скорости и фильтруют выбранный выходной сигнал через цифровой фильтр, синхронизированный с частотой повторения слов выбранного выходного сигнала.
Реализация цифрового фильтра тем сложнее, чем дальше предельная частота фильтра отстоит от частоты дискретизации или частоты повторения слов (требуемые размеры слова, неустойчивости и т.д.). Поэтому согласно настоящему изобретению частоту повторения слов снижают перед фильтрацией насколько можно. Пониженная частота повторения слов может, например, составлять примерно от одной 20-й до одной 30-й максимальной встречающейся частоты сигнала. В применениях с колеблющейся относительной скоростью колеблется и частота сигнала. Это обстоятельство требует согласования в процессе работы предельных частот фильтра или фильтров с частотой сигнала. Изменение предельной частоты фильтра перенастройкой коэффициентов фильтрации без остановки производства проблематично (переходные процессы, проверка устойчивости всех наборов коэффициентов и т.д.). Но поскольку при цифровой фильтрации отношение предельной частоты к частоте дискретизации или частоте повторения слов постоянно, то вместо этого согласно настоящему изобретению используемая частота дискретизации или частота повторения слов динамически согласуется с мгновенной частотой сигнала, т.е. с относительной скоростью. Наборы коэффициентов фильтрации могут в этом случае оставаться неизменными.
Согласно одному из вариантов изобретения n-ступенчатое прореживание частоты повторения слов содержит следующие этапы. Прореживают частоту повторения слов в одном из каскадов прореживателя, в частности в первом каскаде, с регулируемым коэффициентом k, причем k≥2, предпочтительно 20≤k≤40, и прореживают частоту повторения слов в оставшихся каскадах прореживателя, в частности со второго по n-й, с постоянным для них коэффициентом два, т.е. ровно на октаву. Таким способом можно мелким шагом перекрыть большой динамический диапазон. Предпочтительно задавать k в зависимости от мгновенной относительной скорости.
Согласно одному из вариантов изобретения цифровой фильтр представляет собой полосовой фильтр, в частности, с заранее заданными, постоянными в процессе работы, т.е. в процессе неразрушающего контроля материала испытуемого объекта, коэффициентами фильтрации.
Согласно одному из вариантов изобретения частота повторения слов оцифрованного сигнала датчика или цифрового детектированного сигнала лежит в диапазоне от 1 кГц до 200 МГц, предпочтительно от 2 до 6 МГц.
Согласно одному из вариантов изобретения способ также содержит следующие этапы. Воздействуют на испытуемый объект переменным магнитным полем для создания в испытуемом объекте соответственного действующего переменного магнитного поля, причем переменное магнитное поле периодически меняется, по меньшей мере с одной заранее заданной несущей частотой, так что сигнал датчика содержит по меньшей мере одну несущую частоту, а его амплитуда и/или фаза модулируются в зависимости от свойств материала испытуемого объекта, и проводят цифровое детектирование оцифрованного сигнала датчика, при котором оцифрованный сигнал датчика перемножают с цифровым несущим сигналом по меньшей мере одной несущей частоты для получения оцифрованного детектированного сигнала в виде последовательности цифровых слов с заранее заданной частотой повторения слов аналого-цифрового преобразования.
Предложенное устройство выполнено с возможностью осуществления вышеуказанного способа и содержит датчик, аналого-цифровой преобразователь, выполненный для аналого-цифрового преобразования сигнала датчика в оцифрованный сигнал датчика, n-каскадный прореживатель, средство выбора, например матричный переключатель или коммутатор, выполненные для выбора выходного сигнала одного из n каскадов прореживателя в зависимости от относительной скорости, и цифровой фильтр.
Согласно одному из вариантов изобретения датчик представляет собой датчик магнитного поля, выполненный, в частности, для регистрации магнитного поля индуктивным способом или с использованием эффекта Холла.
Согласно одному из вариантов изобретения предусмотрены: средство создания магнитного поля, выполненное для воздействия на испытуемый объект переменным магнитным полем, и цифровой детектор, выполненный для цифрового детектирования оцифрованного сигнала датчика.
Ниже настоящее изобретение раскрывается со ссылкой на чертеж, представляющий предпочтительный вариант осуществления изобретения. При этом на фиг. 1 схематически представлено устройство для неразрушающего испытания материала испытуемого объекта 8, который движется мимо магнитного датчика 1 с переменной, известной устройству относительной скоростью и с помощью не показанных подробно средств создания магнитного поля подвергается воздействию переменного магнитного поля, создаваемого сигналом возбуждения, причем сигнал возбуждения, а вместе с ним и переменное магнитное поле, периодически изменяют по меньшей мере с одной заранее заданной частотой возбуждения или несущей частотой. Частота возбуждения или несущая частота может, например, лежать в диапазоне от 1 до 500 кГц.
Благодаря этому в испытуемом объекте создается соответственное действующее переменное магнитное поле, так что сигнал US датчика содержит по меньшей мере одну несущую частоту, а его амплитуда и/или фаза модулируются в зависимости от свойств материала испытуемого объекта.
Сигнал US датчика фильтруют подключенными далее противопомеховыми фильтрами 2 и затем с помощью аналого-цифрового преобразователя 3 преобразуют из аналоговой форму в цифровую для получения оцифрованного сигнала USD датчика в виде последовательности цифровых слов с заранее заданной постоянной частотой повторения слов и заранее заданной постоянной длиной слова. Таким образом, сигнал US датчика оцифровывают с постоянной частотой повторения слов или частотой дискретизации с квантованием по амплитуде и времени. Частота повторения слов определяется аналого-цифровым преобразователем 3 и составляет, например, 4М (4×220) отсчетов в сек. Аналого-цифровой преобразователь 3 и предвключение противопомеховых фильтров 2 обеспечивают выполнение условий теоремы Шеннона, т.е. входной сигнал аналого-цифрового преобразователя 3 содержит только частотные составляющие < 2 МГц.
Цифровой детектор 4 служит для цифрового детектирования оцифрованного сигнала USD датчика, при этом оцифрованный сигнал USD датчика перемножают с не показанным подробнее оцифрованным несущим сигналом по меньшей мере одной несущей частоты для получения таким образом оцифрованного детектированного сигнала UM в виде последовательности цифровых слов с заранее заданной частотой повторения слов. Детектирование производят синхронизированно с сигналом возбудителя, чтобы можно было определить содержащий результаты контроля сдвиг фаз между сигналом возбудителя и сигналом US датчика. Детектирование осуществляют перемножением с сигналом возбудителя при сохранении полной частоты повторения слов аналого-цифрового преобразователя 3.
Детектирование может выполняться дважды: во-первых, перемножением с косинусным сигналом несущей частоты для получения Х-компоненты, и, во-вторых, перемножением с синусным сигналом несущей частоты для получения Y-компоненты. При этих перемножениях возникают сумма и разность имеющегося спектра и несущей частоты. Дальнейшую обработку каждой из детектированных компонент осуществляют идентичным образом, поэтому дальнейшая обработка раскрыта далее на примере только одной компоненты.
Обычно детектирование производят с 1 или 2 опросами или выборками отсчетов за период несущей при постоянных фазовых углах. В этом случае детектирование означает одновременную дискретизацию с несущей частотой или удвоенной несущей частотой. Чтобы избежать помех в результате наложения спектров, перед этим детектированием частотные диапазоны около 0 Гц и вокруг несущей частоты и кратные им должны быть подавлены фильтром защиты от наложения спектров.
Детектирование согласно настоящему изобретению выполняют с полной, постоянной частотой повторения слов аналого-цифрового преобразователя 3, так что детектирование не зависит от частоты возбудителя или несущей частоты. За счет этого схемные издержки на аналоговую часть перед аналого-цифровым преобразователем 3 сводятся к минимуму, именно к постоянному противопомеховому фильтру нижних частот при половинной частоте повторения слов или частоте повторения слов аналого-цифрового преобразователя 3. Благодаря тому, что частота повторения слов до и в процессе детектирования не уменьшается, противопомехового фильтра перед детектированием не требуется.
Прореживатель с n каскадами от 5_1 до 5_n служит для n-ступенчатого прореживания частоты повторения слов цифрового детектированного сигнала UM, причем выходы каскадов 5_1 - 5_n прореживателя соединены с соответствующими входами средства выбора в виде матричного переключателя 6. Число n каскадов прореживателя может составлять, например, 13.
В детекторе 4 или после него предусмотрено включение не показанного фильтра нижних частот, параметры которого рассчитаны так, чтобы происходило достаточное подавление паразитных сигналов детектирования удвоенной несущей частоты. Одновременно этот фильтр служит фильтром защиты от наложения спектров перед прореживанием частоты повторения слов.
Выход матричного переключателя 6 соединен с цифровым полосовым фильтром 7 в качестве фильтра приложения, причем матричный переключатель 6 выбирает каскад прореживателя в зависимости от мгновенной относительной скорости, значение которой подается на матричный переключатель 6 от скоростемера 9. Выбранный матричным переключателем 6 выходной сигнал служит входным сигналом для полосового фильтра 7, синхронизированного с соответственно уменьшенной частотой повторения слов выбранного выходного сигнала.
Благодаря тому, что синхронизация полосового фильтра 7 зависит от относительной скорости, предельные частоты фильтра оказываются автоматически согласованы с мгновенной относительной скоростью, так что зависящий от относительной скорости спектр выдаваемого датчиком 1 сигнала учитывается автоматически и для этого не нужны обычно требуемые наборы фильтров, зависящие от относительной скорости.
Полосовой фильтр 7 или фильтр 7 приложения, содержащий фильтр 7а нижних частот и фильтр 7b верхних частот, служит по существу для подавления помех, специфических для данного приложения. Помехи, подлежащие фильтрации, порождаются, в основном, материалом испытуемого объекта, например, неоднородностями структуры, отклонениями проницаемости, шероховатостью поверхности и т.д. Здесь важен фильтр 7b верхних частот. Фильтр 7а нижних частот служит для подавления низкочастотных помех, например, фона сети переменного тока и т.п.
Полоса пропускания фильтра 7 приложения соответствует частотам различных искомых дефектов материала при данной скорости продвижения (от узких трещин, пересекаемых поперек, до широких трещин, пересекаемых под углом). На выход фильтра 7 приложения выдается прошедший соответствующий полосовой фильтр детектированный сигнал, который, например, при необходимости может быть после дальнейшего уменьшения частоты повторения слов проанализирован в микропроцессоре или специализированном устройстве для выявления дефектов в испытуемом объекте.
В приложениях с колеблющейся скоростью продвижения или относительной скоростью колеблется и частота сигнала. Это обстоятельство требует согласования в процессе работы предельных частот фильтра или фильтров приложения с частотой сигнала. Изменение предельной частоты фильтра перенастройкой коэффициентов без остановки производства проблематично (переходные процессы, проверка устойчивости всех наборов коэффициентов и т.д.). Однако, поскольку при цифровой фильтрации отношение предельной частоты к тактовой частоте, т.е. к частоте повторения слов, постоянно, то вместо этого тактовая частота динамически согласуется с частотой сигнала. Наборы коэффициентов фильтра 7 приложения могут в этом случае оставаться в процессе работы неизменными.
Ширина полосы должна быть настраиваемой в зависимости, с одной стороны, от встречающихся дефектов материала, а с другой, от появления сигналов помех. Если фильтр 7а нижних частот фильтра 7 приложения эксплуатируется всегда с одним и тем же набором коэффициентов, то для фильтра 7b верхних частот фильтра 7 приложения могут быть приготовлены несколько наборов коэффициентов для конкретных приложений, из которых оператор при наладке может выбрать нужные для данного приложения. Однако в процессе работы испытательного устройства нет необходимости менять набор коэффициентов.
Реализация фильтра 7 приложения тем сложнее, чем дальше предельная частота фильтра отстоит от тактовой частоты фильтра 7 приложения. В связи с этим всегда подготавливается с помощью прореживателя оптимизированная тактовая частота, т.е. частота повторения слов. К примеру, частота повторения слов может быть снижена с помощью прореживателя до одной 24-й от наиболее вероятной частоты сигнала.
Прореживание производят не одним этапом, а делят на ступени; на первой ступени 5_1 прореживания частоту повторения слов изменяют в пределах октавы, а на каждой из соединенных в цепочку ступеней от 5_2 до 5_n частоту повторения слов уменьшают вдвое.
После каждого каскада 5_2 - 5_n в цепи прореживания или делений пополам предусмотрен отвод. Это значит, что одновременно имеются сигналы многих частот регистрации с октавным шагом. При изменении частоты сигнала можно с помощью матричного переключателя 6 перейти на другой, соответственный отвод. Динамический диапазон возможных переключений путем удлинения цепи каскадов 5_2 - 5_n делений пополам можно, в принципе, сделать сколь угодно большим.
Каждый из каскадов 5_1 - 5_n прореживания содержит не показанный фильтр прореживания с меньшим расстоянием между предельной частотой и соответствующей частотой повторения слов, так что фильтры прореживания могут быть выполнены простыми и устойчивыми.
Первый каскад 5_1 прореживания понижает частоту от частоты повторения слов аналого-цифрового преобразователя 3 до наивысшей требуемой частоты регистрации с варьируемым в пределах октавы коэффициентом прореживания k, где k, например, равен 20, 21, 22 … 40. Снижение частоты может, например, происходить таким образом, что после взятия некоторого отсчета k-1 ближайших отсчетов удаляются. К примеру, в первом каскаде 5_1 прореживания частота повторения слов может быть за 20 шагов изменена на октаву при ширине шага ≤5%.
Изменение k происходит при согласовании с частотой сигнала, которая, в свою очередь, определяется по относительной скорости. При колеблющейся относительной скорости производятся регулярные замеры скорости, и, вместе с ней, динамически в ходе работы определяют величину k понижения частоты.
Диапазон изменений частоты повторения слов расширяется октавными шагами на ступенях 5_2 - 5_n прореживания до самой нижней требуемой частоты повторения слов. Понижение частоты с коэффициентом 2 осуществляют отбрасыванием каждого второго отсчета.
Цепочка каскадов 5_2 - 5_n прореживания всегда задействуется на всю длину соответственно минимальной частоте сигнала. После каждой ступени деления пополам может быть использован отвод для дальнейшей обработки испытательного сигнала. Сам же прореживатель остается при этом всегда неизменным.
Понятно, что в случае немодулированных сигналов датчиков от детектора можно отказаться.
Показанные варианты изобретения позволяют надежно и просто осуществить контроль материала при переменной относительной скорости испытуемого объекта и датчика.
Согласно изобретению предложен способ неразрушающего контроля материала испытываемого объекта (8), движущегося мимо датчика (1) с переменной относительной скоростью, содержащий следующие этапы: регистрация сигнала (US) датчика посредством датчика (1); аналого-цифровое преобразование сигнала (US) датчика с получением оцифрованного сигнала (USD) датчика в виде последовательности цифровых слов с заранее заданной, в частности постоянной, частотой повторения слов; n-ступенчатое прореживание частоты повторения слов оцифрованного сигнала (USD) датчика или цифрового детектированного сигнала (UM), выделенного из оцифрованного сигнала датчика, причем это n-ступенчатое прореживание осуществляют с помощью n-каскадного прореживателя (от 5_1 до 5_n), где n≥2; выбор выходного сигнала (от UA_1 до UA_n) одного из n каскадов (от 5_1 до 5_n) прореживателя в зависимости от мгновенной относительной скорости; и фильтрация выбранного выходного сигнала посредством цифрового фильтра (7), синхронизированного с частотой повторения слов выбранного выходного сигнала. Изобретение обеспечивает возможность надежно и просто осуществлять неразрушающий контроль материала испытуемого объекта при переменных относительных скоростях испытуемого объекта. 2 н. и 7 з.п. ф-лы, 1 ил.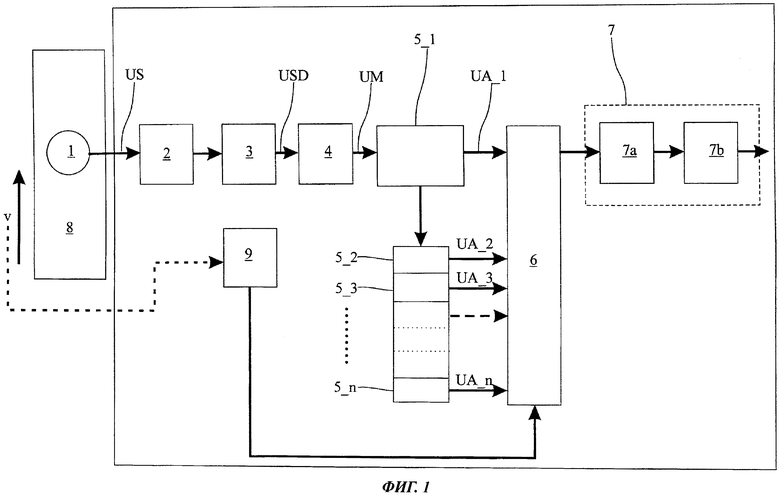
1. Способ неразрушающего испытания материала испытываемого объекта (8), движущегося мимо датчика (1) с переменной относительной скоростью, содержащий следующие этапы:
- регистрация сигнала (US) датчика посредством датчика (1);
- аналого-цифровое преобразование сигнала (US) датчика с получением оцифрованного сигнала (USD) датчика в виде последовательности цифровых слов с заранее заданной, в частности постоянной, частотой повторения слов;
- n-ступенчатое прореживание частоты повторения слов оцифрованного сигнала (USD) датчика или цифрового детектированного сигнала (UM), выделенного из оцифрованного сигнала датчика, причем это n-ступенчатое прореживание осуществляют с помощью n-каскадного прореживателя (от 5_1 до 5_n), где n≥2;
- выбор выходного сигнала (от UA_1 до UA_n) одного из n каскадов прореживателя (от 5_1 до 5_n) в зависимости от мгновенной относительной скорости;
- фильтрация выбранного выходного сигнала посредством цифрового фильтра (7), синхронизированного с частотой повторения слов выбранного выходного сигнала.
2. Способ по п. 1, отличающийся тем, что указанное n-ступенчатое прореживание частоты повторения слов содержит следующие этапы:
- прореживание частоты повторения слов в одном из каскадов прореживателя, в частности в первом каскаде (5_1), с задаваемым коэффициентом k, где k≥2 и предпочтительно 20≤k≤40,
- прореживание частоты повторения слов в оставшихся каскадах прореживателя, в частности со второго по n-й каскад (от 5_2 до 5_n), с постоянным для них коэффициентом два.
3. Способ по п. 2, отличающийся тем, что k задают в зависимости от мгновенной относительной скорости.
4. Способ по любому из предшествующих пунктов, отличающийся тем, что цифровой фильтр (7) представляет собой полосовой фильтр, в частности, с заранее заданными, постоянными в процессе работы коэффициентами фильтрации.
5. Способ по любому из пп. 1-3, отличающийся тем, что частота повторения слов оцифрованного сигнала датчика или цифрового детектированного сигнала лежит в диапазоне от 1 кГц до 200 МГц, в частности от 2 до 6 МГц.
6. Способ по любому из пп. 1-3, отличающийся тем, что содержит следующие этапы:
- воздействие на испытуемый объект (8) переменным магнитным полем для создания в испытуемом объекте (8) соответствующего переменного магнитного поля, причем это переменное магнитное поле периодически меняют по меньшей мере с одной заранее заданной несущей частотой, так что сигнал (US) датчика содержит по меньшей мере одну несущую частоту, а его амплитуду и/или фазу модулируют в зависимости от свойств материала испытуемого объекта;
- цифровое детектирование оцифрованного сигнала (USD) датчика путем его перемножения с оцифрованным несущим сигналом, характеризующимся указанной по меньшей мере одной несущей частотой, для получения указанного цифрового детектированного сигнала (UM) в виде последовательности цифровых слов с заранее заданной частотой повторения слов.
7. Устройство для осуществления способа по любому из пп. 1-6, отличающееся тем, что содержит
- датчик (1),
- аналого-цифровой преобразователь (3), выполненный с возможностью аналого-цифрового преобразования сигнала (US) датчика с получением оцифрованного сигнала датчика,
- n-каскадный прореживатель (от 5_1 до 5_n),
- средство (6) выбора, выполненное с возможностью выбора выходного сигнала (от UA_1 до UA_n) одного из n каскадов прореживателя (от 5_1 до 5_n) в зависимости от относительной скорости,
- цифровой фильтр (7).
8. Устройство по п. 7, отличающееся тем, что датчик (1) представляет собой датчик магнитного поля, выполненный, в частности, с возможностью регистрации магнитного поля индуктивным способом или с использованием эффекта Холла.
9. Устройство по п. 7 или 8, отличающееся тем, что содержит
- средство создания магнитного поля, выполненное с возможностью воздействия на испытуемый объект переменным магнитным полем,
- цифровой детектор (4), выполненный с возможностью цифрового детектирования оцифрованного сигнала датчика.
| ВИХРЕТОКОВОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ И ПОДПОВЕРХНОСТНЫХ ТРЕЩИН В ДЕТАЛЯХ ИЗ ТОКОПРОВОДЯЩИХ МАТЕРИАЛОВ | 2006 |
|
RU2312333C1 |
| WO2006007826A1, 26.01.2006 | |||
| US2004066189A1, 08.04.2004 | |||
| US6275781B1, 14.08.2001 | |||
| US2003227288A1, 11.12.2003 | |||
| US2008114255A1, 15.05.2008. | |||

