Область техники
Настоящее изобретение относится к двунаправленному перемещению движущегося узла в целом и, в частности, при использовании в медицине. Конкретнее, оно относится к узлу перемещения с помощью двигателя, содержащему двунаправленное колесо, а также к рентгенографической системе, содержащей двунаправленное колесо.
В частности, оно относится к перемещению и позиционированию рентгенографической системы относительно подлежащего обследованию объекта.
Предшествующий уровень техники
Рентгенографические системы, в частности, используются в диагностических целях, например, для получения рентгеновских изображений подлежащего обследованию объекта.
Для получения рентгеновских изображений рентгенографическая система, как правило, содержит устройство, генерирующее рентгеновское излучение, и детектор рентгеновского излучения. Устройство, генерирующее рентгеновское излучение, и детекторы рентгеновского излучения расположены на противоположных сторонах подлежащего обследованию объекта и функционально соединены для получения рентгеновских изображений. Рентгеновское излучение излучается устройством, генерирующим рентгеновское излучение, по направлению к детектору рентгеновского излучения. Таким образом, рентгеновское излучение проникает через подлежащий обследованию объект, расположенный между детектором рентгеновского излучения и устройством, генерирующим рентгеновское излучение. Детекторные элементы детектора рентгеновского излучения получают информацию в соответствии с пространственно ослабленным рентгеновским излучением, причем данная информация в последующем используется для генерирования рентгеновского изображения объекта.
Как правило, и устройство, генерирующее рентгеновское излучение, и детектор рентгеновского излучения представляют собой тяжелые, жестко встроенные элементы, имеющие существенную массу. Таким образом, для перемещения рентгенографической системы по поверхности, например по полу операционной, к рентгенографической системе следует прикладывать значительную силу для желаемого размещения и позиционирования.
В частности, может потребоваться точное позиционирование относительно подлежащего обследованию объекта, таким образом, позиционирование в пределах точных допусков.
Краткое изложение существа изобретения
Таким образом, может требоваться дополнительно обеспечиваемое, однако управляемое перемещение и позиционирование устройства, в частности рентгенографической системы, относительно объекта, например, подлежащего обследованию, с необходимостью приложения уменьшенной силы и повышенной точностью манипулирования и позиционирования.
В следующем описании представлены: узел перемещения с помощью двигателя, рентгенографическая система, способ обеспечиваемого двигателем перемещения, а также применение узла перемещения с помощью двигателя, в соответствии с независимыми пунктами формулы изобретения.
В соответствии с иллюстративным вариантом осуществления настоящего изобретения, предоставляется узел перемещения с помощью двигателя, содержащий, по меньшей мере, одно двунаправленное колесо и двигательную компоновку, связанную с, по меньшей мере, одним двунаправленным колесом. Узел перемещения с помощью двигателя выполнен с возможностью движения по поверхности и с возможностью детектирования указания желаемого перемещения узла перемещения с помощью двигателя относительно поверхности. По меньшей мере, одно двунаправленное колесо выполнено с возможностью вращения, по меньшей мере, в первом направлении и, по меньшей мере, во втором направлении, причем первое направление и второе направление являются не параллельными. Двигательная компоновка выполнена с возможностью содействия перемещению узла перемещения с помощью двигателя относительно поверхности в соответствии с этим указанием.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, предоставляется рентгенографическая система, содержащая устройство, генерирующее рентгеновское излучение, детектор рентгеновского излучения и, по меньшей мере, одно двунаправленное колесо. По меньшей мере, одно двунаправленное колесо выполнено с возможностью перемещения рентгенографической системы по поверхности и с возможностью вращения, по меньшей мере, в первом направлении и, по меньшей мере, во втором направлении, причем первое направление и второе направление являются непараллельными. Устройство, генерирующее рентгеновское излучение, и детектор рентгеновского излучения функционально соединены для получения рентгеновских изображений подлежащего обследованию объекта.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, предлагается способ обеспечиваемого двигателем перемещения, содержащий этапы, на которых прикладывают внешнюю силу к узлу перемещения с помощью двигателя, в виде ручного указания желаемого движения узла перемещения с помощью двигателя, относительно поверхности; детектируют внешнюю силу в двигательной компоновке или двигательном элементе; и обеспечивают желаемое движение.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, узел перемещения с помощью двигателя, в соответствии с настоящим изобретением, используется, по меньшей мере, в одной из рентгенографических систем, мобильной рентгенографической системе и дугообразной системе.
Например, в интраоперационном сценарии может использоваться мобильная рентгенографическая система, например дугообразная рентгенографическая система. Может потребоваться, чтобы оператор, например рентгенотехник, получил важные изображения, например, для хирурга перед, во время или после операции. Пространственные требования или пространственные ограничения внутри операционной, в частности во время операции, могут требовать позиционирования мобильной рентгенографической системы в отдалении от операционного стола в течение времени, когда нет необходимости в получении изображения. Следовательно, при возникновении потребности в получении рентгеновских изображений может потребоваться перемещение рентгенографической системы в область операции или от нее для получения рентгеновских изображений и последующего хранения рентгенографической системы. Поскольку мобильная рентгенографическая система, в частности, вследствие значительного веса устройства, генерирующего рентгеновское излучение, и детектора рентгеновского излучения сама может составлять тяжелую часть оборудования, перемещение рентгенографической системы может представлять собой трудоемкую работу.
Таким образом, благоприятным может быть осуществляемое двигателем, но, однако, управляемое вручную перемещение рентгенографической системы для ее перемещения по поверхности.
Оператор может начать желаемое перемещение, например, двигая мобильную рентгенографическую систему по направлению к операционному столу. Рентгенографическая система или, по меньшей мере, ее части может детектировать начатое движение или, по меньшей мере, указание желаемого движения, подобное, например, силе, приложенной к мобильной рентгенографической системе, для определения желаемого движения, например, пространственного вектора в направлении желаемого движения.
Мобильная рентгенографическая система, в частности элемент управления, выполненный с возможностью детектирования соответственно желаемого движения и вектора его движения, может входить в зацепление с подходящим образом расположенным двигательным элементом, который может добавить накладывающуюся или дополнительную силу. Соответствующая поддерживающая сила, развиваемая, по меньшей мере, одним двигательным элементом, может уменьшить ощущение трения и/или массы, воспринимаемое оператором, желающим переместить мобильную рентгенографическую систему. Другими словами, оператор может обеспечить подачу ручного указания в рентгенографическую систему, например, перемещая или толкая рентгенографическую систему в желаемом направлении. Мобильная рентгенографическая система может детектировать желаемое направление и может вводить в зацепление, по меньшей мере, один двигательный элемент для поддержания движения в желаемом направлении.
При использовании, в частности, ручного указания желаемого движения, например, толканием рентгенографической системы, кнопки, переключатели или подобные устройства могут не потребоваться для вождения или управления, соответственно, рентгенографической системой и направлением ее движения. Таким образом, может не потребоваться отдельный, специально предназначенный «обеспечивающий движение» привод, переключатель или кнопка. Однако для полностью автоматизированного режима движения может быть полезным соответствующий привод, переключатель или кнопка. Например, джойстик может использоваться для указания направления, таким образом, вектора желаемого движения рентгенографической системы по поверхности.
Могут быть осуществлены дополнительные функции, подобные программируемым останавливающим стопорам для направления в предпочтительные или предварительно заданные положения, например, для перемещения рентгенографической системы в определенное и/или ранее использовавшееся положение. Также возможно выполнение индивидуальных профилей пользователя с различными, индивидуальными уровнями содействия двигателя.
Двигательный элемент может быть, в частности, выполнен с наличием функции прямого привода, например путем использования двигательного элемента прямого привода. Двигательный элемент прямого привода может рассматриваться как двигательный элемент, который не требует или не содержит отдельную коробку передач, имеющую некоторое передаточное число.
В частности, использование двигательного элемента прямого привода может обеспечить выполнение различных режимов работы, например режима привода, режима захвата или режима свободного хода и режима торможения.
Режим привода может обеспечить возможность ручного управления перемещением, осуществляемым двигателем.
Дополнительный режим привода, например автоматический режим привода или моторизованный режим привода, может быть выполнен использованием элементов интерфейса пользователя, подобных, например, кнопкам, переключателям, джойстику, или даже речевого управления. Дополнительный режим работы может представлять собой режим захвата или режим свободного хода. Соответствующий режим может быть достигнут прерыванием подачи питания на двигательный элемент. В данном случае может быть получен по существу свободно передвигаемый двигательный элемент, который может считаться по существу свободно передвигаемым, не требующим дополнительного приложения сил, кроме ручного перемещения рентгенографической системы без содействия двигателя.
Кроме того, возможен режим торможения, в котором рентгенографическая система может остановиться в предварительно определенном положении и может даже удерживаться в упомянутом положении двигательным элементом, противодействуя силам, возможно непреднамеренно прилагаемым к рентгенографической системе, например лицом, непреднамеренно наткнувшимся на рентгенографическую систему.
Двигательные элементы могут представлять собой щеточные или бесщеточные электродвигатели. Бесщеточный двигательный элемент может, в частности, обеспечить хорошие характеристики управления при высоких крутящих моментах и низких скоростях, включая нулевую скорость. Следовательно, могут использоваться трансмиссии с низкой передачей или элементы прямого привода, что приводит к высокоэффективной передаче сил.
Кроме того, путем использования принципа прямого привода, например двигательного элемента прямого привода, ток двигательного элемента может представлять собой предпочтительный критерий или указание соответствующего крутящего момента при определенной нагрузке, например, вследствие прилагаемого крутящего момента или силы к рентгенографической системе. Элемент управления движением может быть установлен на режим крутящего момента или режим тока, где крутящий момент или сила, прилагаемая к двигательному элементу, может быть определена итоговым током двигателя или дифференциальным током двигателя, которые могут служить основой для обеспечения функциональности содействия двигателя. Другими словами, двигатель может определять направление, в котором оператор толкает или тянет рентгенографическую систему, и в этом случае двигательный элемент активируется для содействия перемещению в желаемом направлении, например, путем подачи питания в двигательный элемент для перемещения рентгенографической системы в желаемом направлении.
Дополнительные функции, подобные останавливающим стопорам, предпочтительному позиционированию и торможению, могут осуществляться по существу мгновенным переключением, например «переключением на лету», с режима крутящего момента на режим скорости или положения. В режиме скорости или положения может быть предпочтительным определение абсолютного или, по меньшей мере, относительного положения рентгенографической системы относительно поверхности, на которой ее предстоит переместить.
Дополнительная проблема обеспечения функциональности содействия двигателя может представлять собой аспект безопасности. Как правило, при использовании двигательных элементов вблизи подлежащего обследованию объекта, например пациента, соответствующая моторизованная система может управляться при контроле постоянного участия оператора. В данном случае путем использования предназначенной для этого кнопки или переключателя, которые должны быть отключены в случае отказа или ошибки в работе, двигательный элемент деактивируется, и, таким образом, движение останавливается по существу мгновенно.
Поскольку один аспект настоящего изобретения может рассматриваться как выделение предназначенного для запуска элемента, например переключателя или кнопки для управления и/или инициации запускаемого двигателем движения, может понадобиться обеспечение осуществления дополнительных мер безопасности. Соответственно, например, крутящий момент и/или скорость поддерживаемого движения могут быть ограниченными до уровня, который требует от оператора по существу постоянной силы или указания желаемого движения. В данном случае, если постоянная сила или указание больше не присутствует, то движение может также по существу немедленно останавливаться. Соответствующий признак безопасности может отвечать «требованию безопасности по принципу одной неисправности», означающему, что отказ любого отдельного компонента или неспособность обеспечить требуемую постоянную силу или указание могут привести по существу к немедленному выключению поддерживаемого двигателем движения с переводом в безопасное состояние, в последующем предотвращая автоматическую работу до исправления соответствующей проблемы.
Дополнительный аспект настоящего изобретения может рассматриваться как выполнение двунаправленных колес. Путем использования двунаправленных колес с мобильной рентгенографической системой возможно комбинирование двунаправленных колес с двигательными элементами и/или подходящей системой управления, при этом мобильная рентгенографическая система может перемещаться в любом направлении или может вращаться вокруг любой точки.
Желаемое движение может направляться ручным указанием или элементом управления и интерфейсом пользователя. В отношении ручного указания рентгенографическая система может также быть выполнена с возможностью активации двигательного элемента с тем, чтобы он содействовал оператору при перемещении или позиционировании рентгенографической системы.
В отличие от роликовых колес, обычно используемых в рентгенографических системах, двунаправленные колеса могут, в частности, не требовать поворота в направлении движения до возникновения действительного движения или даже его возможности. Двунаправленные колеса могут начать вращение в любом направлении по существу мгновенно при начале желаемого движения. Таким образом, двунаправленные колеса могут требовать меньших усилий для начала и поддержания движения и, таким образом, могут быть способны к тонкой регулировке рентгенографической системы относительно объекта без необходимости использования небольших возвратно-поступательных движений или небольших продольных движений, возможно в комбинации, для точного позиционирования рентгенографической системы.
В рентгенографических системах, где используются роликовые колеса, оси дополнительных малых перемещений могут быть предназначены для обеспечения тонкой регулировки размещения рентгенографической системы. Данные оси малых дополнительных перемещений могут называться осью для возвратно-поступательного движения, небольшого углового движения и осью для небольшого продольного движения, т.е. небольшого горизонтального движения в плоскости движения рентгенографической системы на поверхности.
Использование двунаправленных колес может устранить потребность в осуществлении таких осей малого перемещения. Двунаправленные колеса могут рассматриваться как колеса, которые обеспечивают два направления движения, отличающиеся друг от друга. При каждом направлении движения колесо может быть выполнено с возможностью вращению по существу без какого-либо буксования.
Двунаправленное колесо обычно не поворачивается для возможности движения или вращения в каждом из двух различных направлений. Таким образом, двунаправленные колеса могут обеспечить возможность двумерного движения, не требуя рулевого устройства или рулевого механизма. В частности, двунаправленное колесо может содержать, по меньшей мере, первый вращающийся элемент и, по меньшей мере, второй вращающийся элемент, которые отличаются друг от друга, и оба вращающихся элемента выполнены с возможностью вращения в определенном направлении, причем указанные два направления отличаются друг от друга.
Хотя ориентация двух осей друг к другу может быть произвольной, она, в частности, может быть благоприятной в случае, если два направления, следовательно, направления движения, по существу перпендикулярны друг к другу. Каждый, по меньшей мере, из двух вращающихся элементов - первый вращающийся элемент и второй вращающийся элемент - может комбинироваться с подходящим двигательным элементом привода для обеспечения возможности поддерживаемого, вспомогательного или даже автоматического перемещения или вращения первого вращающегося элемента и второго вращающегося элемента соответственно в первом направлении и втором направлении.
Путем комбинирования движения первого вращающегося элемента и второго вращающегося элемента может быть получено произвольное движение в двумерной плоскости. Итоговое направление движения может быть определено сложением векторов. Двигательные элементы, связанные, по меньшей мере, с одним первым вращающимся элементом и, по меньшей мере, одним вторым вращающимся элементом, могут быть выполнены с возможностью содействия оператору в подаче сил на элементы привода, когда оператор позиционирует рентгенографическую систему, например, относительно тела пациента, путем ручного указания, с тем чтобы перемещение и позиционирование возможно тяжелой рентгенографической системы могло выполняться легко и точно.
В моторизованном режиме двигательные элементы могут приводиться в действие элементом управления в соответствии с желаемым направлением движения, например путем использования джойстика для рулевого управления рентгенографической системы.
Таким образом, могут быть уменьшены силы, требуемые для точного позиционирования рентгенографической системы. Ручное позиционирование может точно и удобно осуществляться путем использования режима содействия двигателя, в то время как продольные и возвратно-поступательные движения осей дополнительного малого перемещения могут быть устранены путем использования двунаправленных колес.
В следующем описании представлены другие иллюстративные варианты осуществления настоящего изобретения, относящиеся, в частности, к узлу перемещения с помощью двигателя. Однако следует понимать, что данные объяснения также относятся к рентгенографической системе, к способу перемещения с использованием двигателя и к применению узла перемещения с помощью двигателя.
Следует отметить, что возможны произвольные изменения и взаимообмены одного или множественных признаков между заявляемыми объектами, в частности между вариантами осуществления, относящимися к притязаниям по типу устройства, притязаниям по типу способа и притязаниям по типу применения, и все они возможны и охватываются объемом и описанием настоящей патентной заявки.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, по меньшей мере, одно двунаправленное колесо может содержать, по меньшей мере, один первый вращающийся элемент и/или, по меньшей мере, один второй вращающийся элемент, причем, по меньшей мере, один первый вращающийся элемент приспособлен для вращения в первом направлении и/или, по меньшей мере, один второй вращающийся элемент приспособлен для вращения во втором направлении.
Путем выполнения двунаправленного колеса с отдельными вращающимися элементами, которые приспособлены для вращения в различных, отдельных направлениях, двунаправленность движения может быть легко осуществима, таким образом, приводя к произвольному двумерному движению в пределах данной плоскости, например по поверхности пола.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, двигательная компоновка может содержать, по меньшей мере, один первый двигательный элемент, связанный, по меньшей мере, с одним двунаправленным колесом, в частности, по меньшей мере, с одним первым вращающимся элементом, причем, по меньшей мере, один первый вращающийся элемент может быть выполнен с возможностью перемещения узла перемещения с помощью двигателя/первого вращающегося элемента в первом направлении.
Путем использования двигательного элемента может быть легко получено обеспечиваемое двигателем или автоматизированное движение в первом направлении.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, двигательная компоновка может дополнительно содержать, по меньшей мере, один второй двигательный элемент, связанный, по меньшей мере, с одним двунаправленным колесом, в частности, по меньшей мере, с одним вторым вращающимся элементом, причем, по меньшей мере, один второй вращающийся элемент может быть выполнен с возможностью перемещения узла перемещения с помощью двигателя во втором направлении.
При соответствующем обеспечиваемом двигателем или моторизованном движении во втором направлении узел перемещения с помощью двигателя может перемещаться в двумерной плоскости с приложением уменьшенных сил и повышенной точностью позиционирования.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, двигательная компоновка, первый двигательный элемент и/или второй двигательный элемент могут быть выполнены с возможностью детектирования указания желаемого перемещения, силы и/или крутящего момента, действующего на двигательную компоновку, первый двигательный элемент и/или второй двигательный элемент.
Соответствующее указание, сила или крутящий момент могут рассматриваться как показатели желаемого направления движения. Таким образом, двигательная компоновка, первый двигательный элемент и/или второй двигательный элемент могут с одной стороны быть способны определять направление желаемого движения, тогда как с другой стороны могут быть способны непосредственно поддерживать или содействовать желаемому движению.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, указание может представлять собой ручное указание.
Это может, в частности, представлять собой силу, воздействующую на узел перемещения с помощью двигателя, не требуя предназначенных кнопок и переключателей или других элементов управления.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, узел перемещения с помощью двигателя может содержать, по меньшей мере, один режим из группы, состоящей из режима привода, режима захвата, режима свободного хода, режима торможения, режима содействия двигателя, режима позиционирования и моторизованного режима.
Соответствующие типы или функциональные режимы могут обеспечить возможность адаптации характеристики узла перемещения с помощью двигателя в целом и двигательных элементов в частности к различным сценариям функционирования, например, режим привода, возможно, в связи с режимом позиционирования, может обеспечить возможность осуществляемого двигателем позиционирования узла перемещения с помощью двигателя с повышенной точностью, в то время как режим торможения, активируемый при достижении желаемого положения, может обеспечить возможность точного удержания узла перемещения с помощью двигателя в желаемом положении.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, узел перемещения с помощью двигателя может быть приспособлен для автоматического повторного позиционирования.
Автоматическое повторное позиционирование может обеспечить возможность, по меньшей мере, частичного автоматического повторного позиционирования узла перемещения с помощью двигателя в ранее заданное или известное положение, например, элементом управления системы управления, в то же время учитывая относительное движение относительно поверхности, или даже абсолютное позиционирование рентгенографической системы, например, в помещении.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, двигательная компоновка может быть выполнена с возможностью содействия движению узла перемещения с помощью двигателя путем, по меньшей мере, частичного уменьшения воспринимаемого сопротивления перемещению и/или движущей силы узла перемещения с помощью двигателя.
Таким образом, при содействии желаемому перемещению оператор может воспринимать уменьшенное сопротивление перемещению или движущую силу при попытке перемещения или сдвигания узла перемещения с помощью двигателя вследствие приведения в действие двигательных элементов в желаемом направлении движения.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, элемент управления движением может быть обеспечен для управления перемещением узла перемещения с помощью двигателя относительно поверхности.
Соответствующий элемент управления движением может быть выполнен с возможностью обеспечения указания или для принятия указания желаемого движения, возможно, трансформируя его в электрическое представление вектора желаемого движения или управляя, по меньшей мере, одним из первого двигательного элемента и/или второго двигательного элемента для обеспечения осуществляемого двигателем перемещения или даже автоматизированного перемещения.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, двигательная компоновка может представлять собой двигательную компоновку прямого привода.
Двигательная компоновка прямого привода может, в частности, обеспечить адекватную обратную связь для определения желаемого направления перемещения.
В следующем описании представлены дополнительные иллюстративные варианты осуществления настоящего изобретения, относящиеся, в частности, к рентгенографической системе. Однако следует понимать, что данные объяснения также относятся к узлу перемещения с помощью двигателя, к способу перемещения двигателем и к применению узла перемещения с помощью двигателя.
В соответствии с дополнительным иллюстративным вариантом осуществления настоящего изобретения, рентгенографическая система может дополнительно содержать узел перемещения с помощью двигателя, в соответствии с настоящим изобретением, причем, по меньшей мере, одно двунаправленное колесо относится к узлу перемещения.
Другими словами, рентгенографическая система, содержащая узел перемещения с помощью двигателя, в целом может все же содержать только одно двунаправленное колесо. Обеспечение рентгенографической системы двигательным узлом, способствующим перемещению, может дать возможность легко и удобно перемещать и позиционировать рентгенографическую систему относительно пациента, например, по сценарию проведения хирургической операции.
Эти и другие аспекты настоящего изобретения станут очевидными и ясными со ссылкой на описанные далее варианты осуществления.
Иллюстративные варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на следующие чертежи.
Иллюстрация в чертежах является схематической. На различных чертежах одинаковые или идентичные элементы представлены с одинаковыми или идентичными условными обозначениями.
Чертежи представлены не в масштабе, однако они могут изображать качественные пропорции.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает иллюстративный вариант осуществления перемещения рентгенографической системы;
фиг.2a-c изображают иллюстративные варианты двунаправленных колес в соответствии с настоящим изобретением;
фиг.3 изображает подробную схему иллюстративного варианта осуществления двунаправленного колеса в соответствии с настоящим изобретением;
фиг.4a-d изображают различные сценарии движения узлов перемещения с помощью двигателя, содержащих двунаправленные колеса, в соответствии с настоящим изобретением;
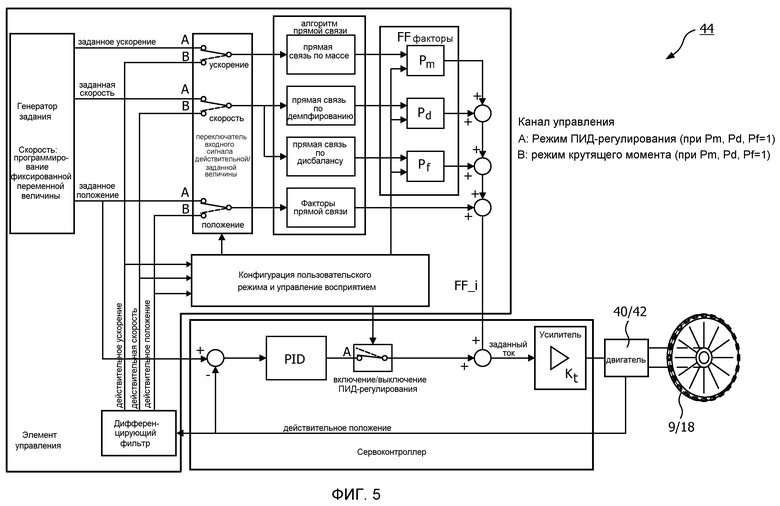
фиг.5 изображает блок-схему иллюстративного варианта осуществления системы управления движением для узла перемещения с помощью двигателя, в соответствии с настоящим изобретением;
фиг.6 изображает блок-схему алгоритма иллюстративного варианта способа, осуществляемого двигателем позиционирования в соответствии с настоящим изобретением.
Описание предпочтительных вариантов осуществления изобретения
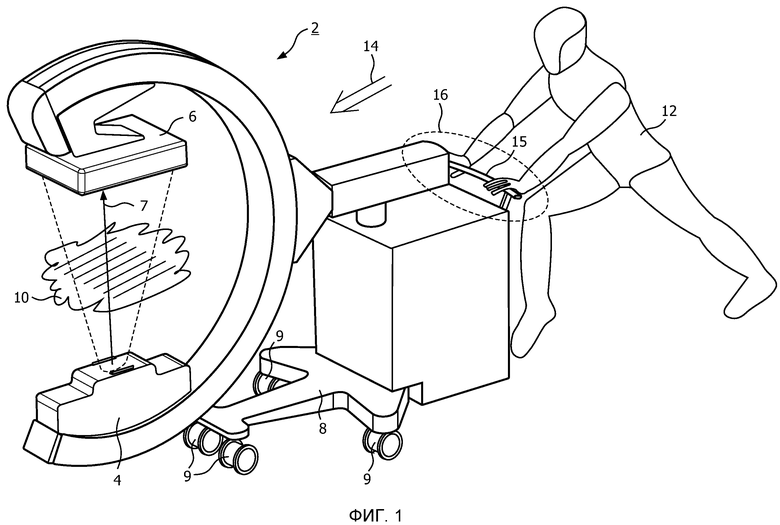
На фиг.1 изображен иллюстративный вариант осуществления перемещения рентгенографической системы.
На фиг.1 рентгенографическая система 2, иллюстративно изображенная в виде дугообразной системы, содержит устройство 4, генерирующее рентгеновское излучение, например рентгеновскую трубку, и детектор 6 рентгеновского излучения. Объект 10 изображен схематически на пути рентгеновского излучения 7, излучаемого из генератора 4 рентгеновского излучения по направлению к детектору 6 рентгеновского излучения и проникающего через объект 10. Колесная компоновка 8, содержащая колеса 9, расположена на корпусе рентгенографической системы 2 для перемещения рентгенографической системы по поверхности, например по полу операционной.
Оператор 12 перемещает рентгенографическую систему 2 в направлении желаемого перемещения 14, толкая рентгенографическую систему 2 с использованием рукоятки 15.
Таким образом, оператор 12 применяет указание желаемого перемещения 16 рентгенографической системы 2 для перемещения рентгенографической системы в желаемом направлении перемещения 14.
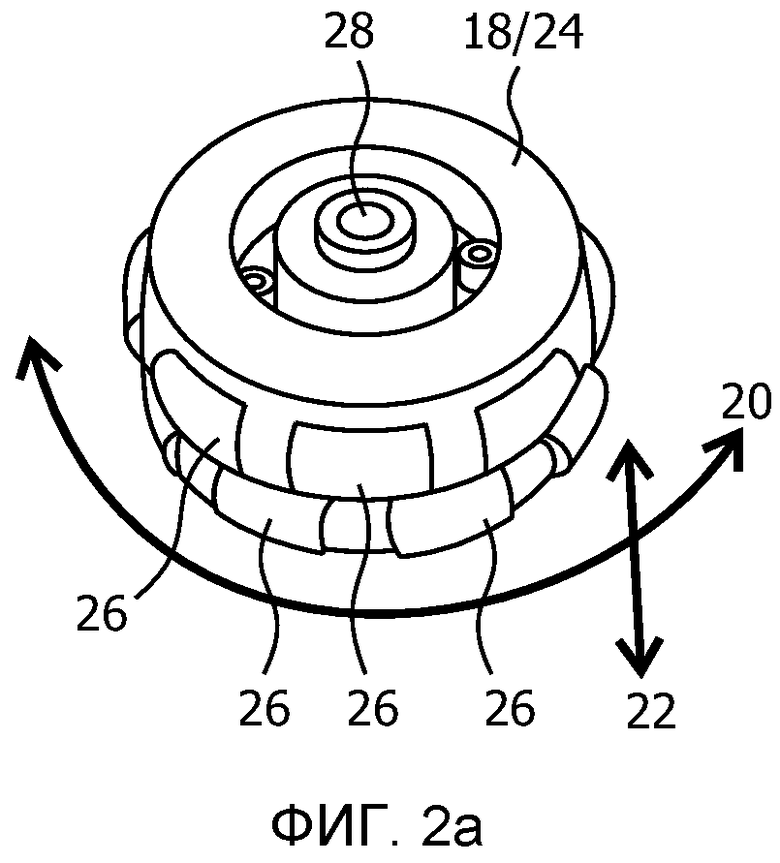
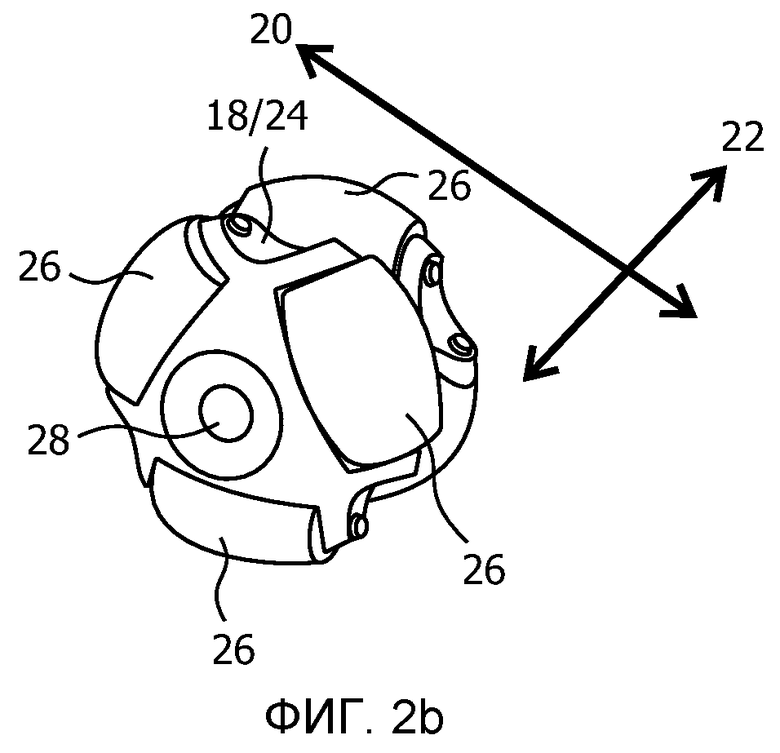
На фиг.2a-c изображены иллюстративные варианты осуществления двунаправленных колес в соответствии с настоящим изобретением.
На фиг.2a, 2b, в частности, показаны отдельные варианты осуществления двунаправленных колес 18, тогда как на фиг.2c показан иллюстративный вариант осуществления узла 19 перемещения с помощью двигателя, содержащего, в данном случае иллюстративно, три двунаправленных колеса 18.
На фиг.2a двунаправленное колесо 18 содержит ось 28 для вращения двунаправленного колеса 18 в первом направлении 20, по существу вращающегося по окружности двунаправленного колеса 18. Таким образом, наружная окружность двунаправленного колеса 18 может считаться первым вращающимся элементом 24. Таким образом, двунаправленное колесо 18 может быть вращаемым в первом направлении 20 с первым предназначенным для этого вращающимся элементом 24 или без него, в то же время содержит дополнительный второй вращающийся элемент 26 для вращения во втором направлении 22.
Второй вращающийся элемент 26 содержит два ряда отдельных роликов, причем указанные два ряда отставлены друг от друга для эффективного перекрытия промежутка между двумя соседними вращающимися элементами 26 одного ряда и вращающимся элементом 26 другого ряда. Таким образом, не возникают мертвые зоны, в которых двунаправленное колесо 18 может быть неподвижным во втором направлении 22. И снова наружная окружность двунаправленного колеса 18 в отношении оси 28 или всех вторых вращающихся элементов 26 вместе может рассматриваться как первый вращающийся элемент 24.
На фиг.2b изображен дополнительный вариант осуществления двунаправленного колеса 18. На фиг.2b отдельные вторые вращающиеся элементы 26 существенно больше по сравнению с вариантом осуществления, показанным на фиг.2a, хотя основной принцип сохраняется.
Каждый ряд отдельных вторых вращающихся элементов 26 содержит три вращающихся элемента 26. И в данном случае вращающиеся элементы 26 обоих рядов смещены или отставлены друг от друга для перекрытия промежутка между соседними вторыми вращающимися элементами 26 для того, чтобы всегда обеспечивать возможность вращения двунаправленного колеса 18 во втором направлении 22.
На фиг.2c изображен узел 19 перемещения с помощью двигателя, иллюстративно содержащий три двунаправленных колеса 18. Использование, по меньшей мере, трех двунаправленных колес 18 обеспечивает возможность надежного позиционирования и перемещения узла 19 перемещения с помощью двигателя по поверхности.
Однако может использоваться произвольное число двунаправленных колес, подобное одному, двум, четырем, пяти, шести, семи, восьми или даже более двунаправленных колес 18, возможно, с добавлением, по меньшей мере, одного или двух опорных колес. Каждое двунаправленное колесо 18a, 18b, 18c узла 19 перемещения с помощью двигателя выполнено с возможностью вращения вокруг его индивидуальной оси 28 для перемещения соответствующего двунаправленного колеса 18a, 18b, 18c в его индивидуальном первом направлении 20a, 20b, 20c.
На наружной в отношении вращательно оси 28 окружности двунаправленных колес 18a, 18b, 18c расположено множество вторых вращающихся элементов 26. Вторые вращающиеся элементы 26 позволяют узлу 19 перемещения с помощью двигателя перемещаться в направлении 22, являющемся отдельным направлением для каждого двунаправленного колеса 18, причем второе направление 22 является параллельным оси 28 в иллюстративном варианте осуществления, показанном на фиг.2c.
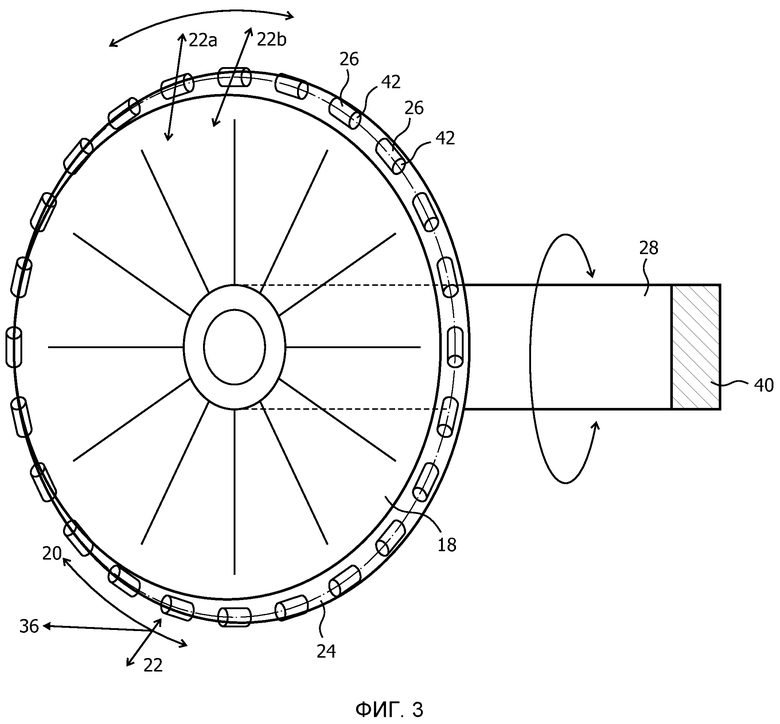
На фиг.3 изображена подробная схема иллюстративного варианта осуществления двунаправленного колеса в соответствии и с настоящим изобретением.
Первый двигательный элемент 40 расположен на оси 28 вращения двунаправленного колеса 18 для перемещения двунаправленного колеса 18 в первом направлении 20, по существу вращая двунаправленное колесо 18 по его наружной окружности. Наружная окружность и вторые вращающиеся элементы 26 могут соответственно рассматриваться как составляющие первый вращающийся элемент 24.
На наружной окружности двунаправленного колеса 18 относительно оси 28 расположено множество вторых вращающихся элементов 26. На фиг.3 изображен только один ряд вторых вращающихся элементов 26 с возможным расположением вторых вращающихся элементов 26 так, чтобы было возможно перемещение во втором направлении 22 в каждом возможном угловом положении двунаправленного колеса относительно наружной окружности/оси 28, вследствие плотного прилегания и, возможно, малых размеров вторых вращающихся элементов 26.
Однако возможно наличие дополнительного ряда вторых вращающихся элементов 26, подобных тем, которые показаны на фиг.2a или 2b.
Каждый из вторых вращающихся элементов 26 может двигаться так, чтобы могло выполняться перемещение во втором направлении 22. Движение, а следовательно, вращение второго вращающегося элемента 26 для обеспечения перемещения во втором направлении 22 может представлять собой пассивное перемещение, например, вследствие проталкивания двунаправленного колеса 18, по меньшей мере, частично во втором направлении 22, или может представлять собой активное перемещение путем использования вторых двигательных элементов 42, связанных, по меньшей мере, с подгруппой вторых вращающихся элементов 26 для приведения в действие вторых вращающихся элементов 26 для перемещения во втором направлении 22.
Таким образом, в то время как двунаправленное колесо 18 движется в первом направлении 20 путем вращения по наружной окружности двунаправленного колеса 18, смещение путем использования вторых вращающихся элементов 26 в направлении 22 может привести к движению 36 по суммарному вектору, составленному и из перемещения в первом направлении 20, и из перемещения во втором направлении 22, таким образом приводя к перемещению 36 по суммарному вектору.
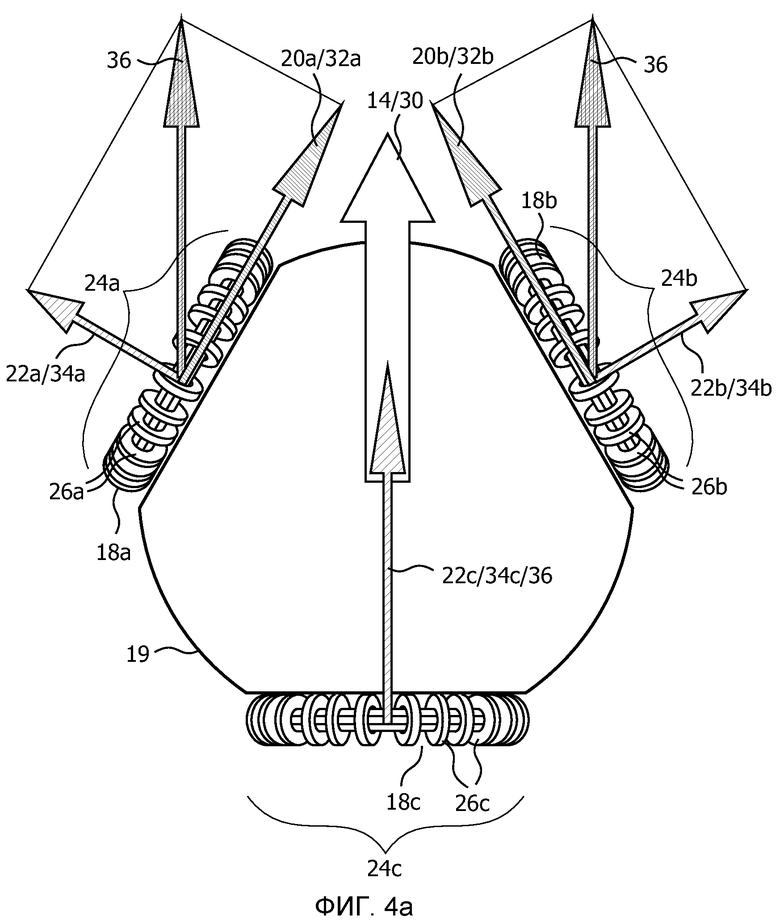
На фиг.4a-4d изображены различные сценарии перемещения узлов перемещения с помощью двигателя, содержащих двунаправленные колеса в соответствии с настоящим изобретением.
На фиг.4a узел 19 перемещения с помощью двигателя, содержащий три двунаправленных колеса 18a, 18b, 18c, должен быть перемещен в желаемом направлении 14 перемещения. В отношении двунаправленного колеса 18a изображен принцип сложения векторов для получения итогового перемещения 30/36. Двунаправленное колесо 18a движется в первом направлении 20 путем использования первого вращающегося элемента 24a, что приводит к перемещению 32a первого вращающегося элемента 24a.
Двунаправленное колесо 18b иллюстративно выполняет аналогичное перемещение его в отношении первого направления 20b, поскольку в отношении первого направления 20a, 20b оба двунаправленных колеса 18a, 18b не выровнены параллельно. Итоговое перемещение двунаправленных колес 18a, 18b исключительно в направлении 20a, 20b привело бы к некоторому типу направленной наружу пробуксовки двунаправленных колес 18a, 18b. Направленная наружу пробуксовка может рассматриваться как компенсируемая перемещением двунаправленных колес 18a, 18b, в частности вторых вращающихся элементов 26a, 26b, во втором направлении 22a, 22b.
Таким образом, может быть получен итоговый суммарный вектор перемещения 36 двунаправленного колеса 18, который параллелен желаемому направлению перемещения 14, таким образом, приводя к перемещению 30 узла 19 перемещения с помощью двигателя.
На фиг.4a третье двунаправленное колесо 18c требуется только для перемещения его во втором направлении 22c, поскольку желаемое направление перемещения 14 в данном случае перпендикулярно первому направлению 20.
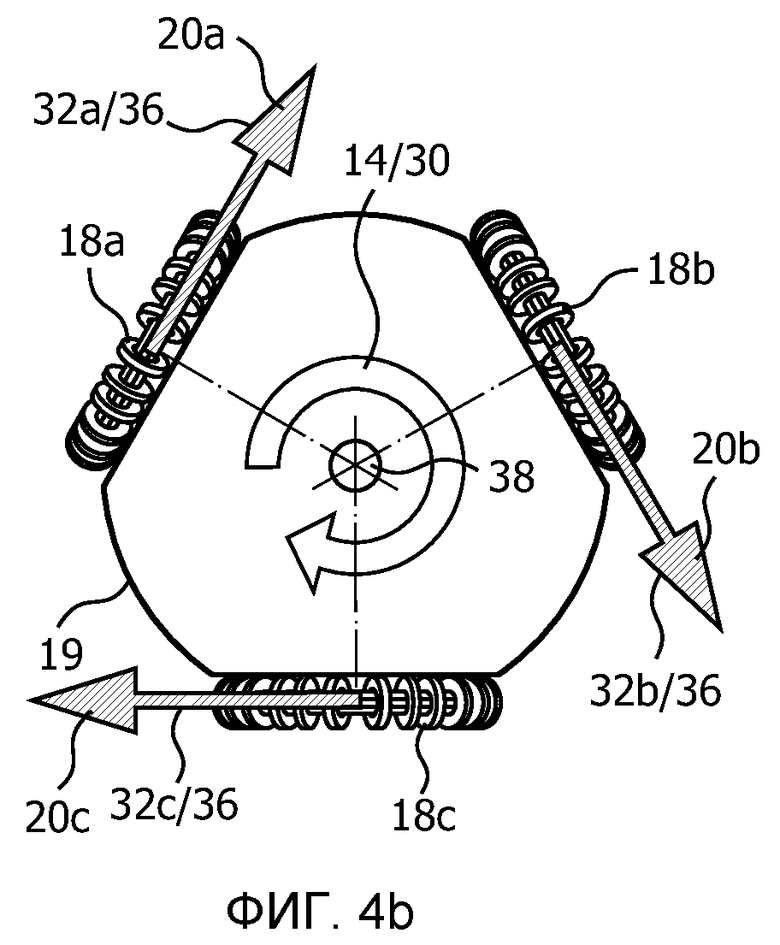
На фиг.4b изображен поворот узла перемещения с помощью двигателя, по существу, на месте вокруг точек 38 поворота. Таким образом, желаемое перемещение 14 представляет собой круговое перемещение, которое приводит к повороту узла 19 перемещения с помощью двигателя, вокруг точки 38 поворота. Данное перемещение 30 может быть получено по существу только перемещением двунаправленных колес 18a, 18b, 18c в первом направлении 20a, 20b, 20c для поворота.
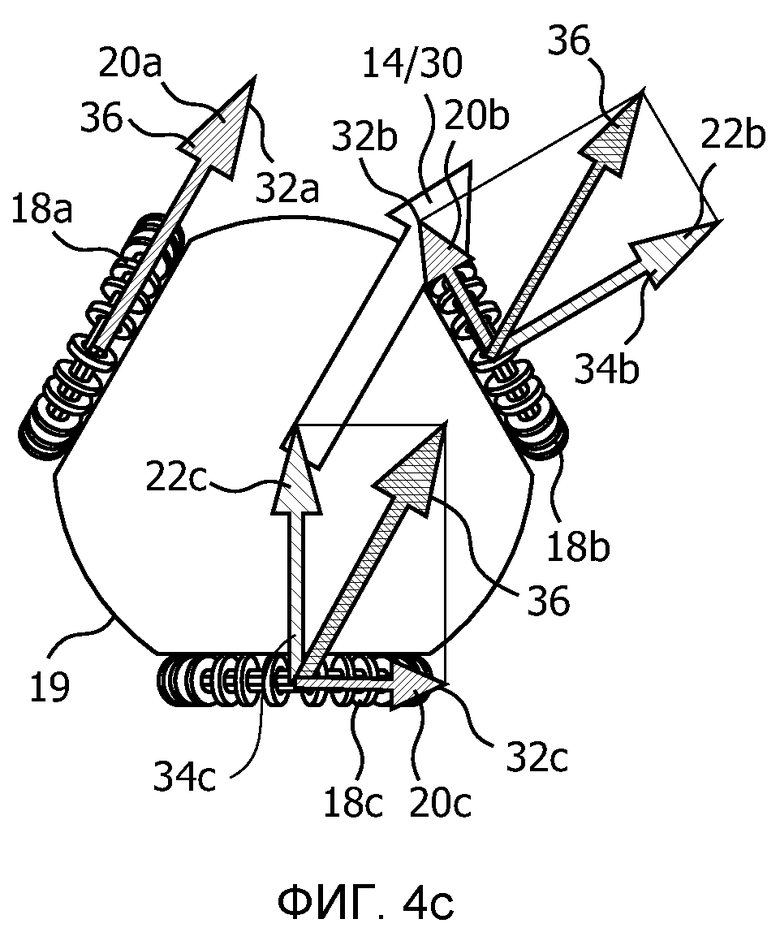
На фиг.4c изображено перемещение, которое должно быть получено как линейное направленное по существу в первом направлении 20a перемещение двунаправленного колеса 18a. Соответственно, перемещение 36b, 36c по суммарному вектору двунаправленных колес 18b, 18c должно быть таким, чтобы могло быть получено итоговое перемещение 30 в направлении желаемого перемещения 14. И снова в отношении двунаправленных колес 18b, 18c для получения итогового перемещения 30 необходимо использовать итоговое перемещение 36 по суммарному вектору, составленное перемещением в первом направлении 20b, 20c и во втором направлении 22b, 22c.
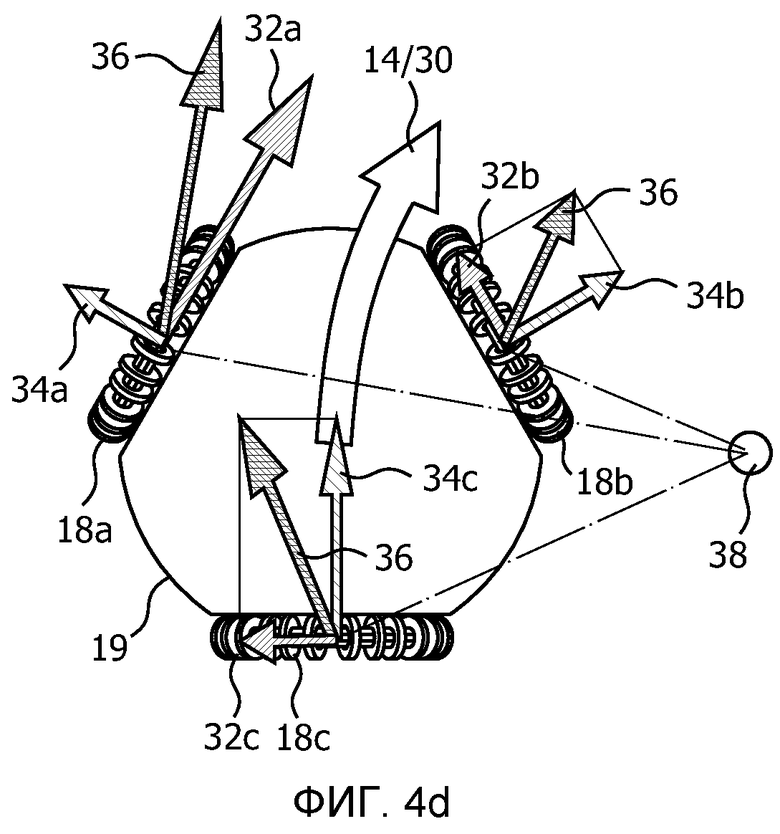
На фиг.4d представлено выполнение поворота вокруг точки 38 поворота. Поскольку точка 38 поворота на фиг.4d не находится в пределах центра узла 19 перемещения с помощью двигателя, то по существу все три двунаправленных колеса 18a, 18b, 18c должны использовать перемещение в первом направлении 20a, 20b, 20c и во втором направлении 22a, 22b, 22c для получения итогового перемещения 30 в качестве желаемого перемещения 14.
На фиг.5 изображена блок-схема иллюстративного варианта осуществления элемента управления движением узла перемещения с помощью двигателя, в соответствии с настоящим изобретением.
Двигательная компоновка 40/42 может, например, представлять собой бесщеточную двигательную компоновку 40/42 переменного тока с векторным управлением для приведения в действие дугообразной рентгенографической системы 2, в частности колеса 9, например двунаправленного колеса 18. В бесщеточном двигателе переменного тока (BLAC) может, в частности, использоваться система коммутации с электронным синусоидальным векторным управлением. Соответствующий тип двигателя может обеспечить крутящий момент в четырех квадрантах и диапазон скоростей, начиная с нуля.
Двигательная компоновка 40/42 принимает приводящее в действие питание через усилитель Kt и обеспечивает обратную связь в отношении положения с помощью абсолютного кодера обратной связи по абсолютному положению для коммутации и сервоуправления. На фиг.5 могут быть заданы два основных режима, описанных как режим A, ПИД (пропорционально-интегрально-дифференциальное регулирование) или режим позиционирования и режим B, режим крутящего момента/тока. Сервоконтроллер обеспечивает такие функции, как управление коммутацией бесщеточного двигателя переменного тока, контур управления крутящим моментом/током, контур управления положением (ПИД) и контур управления механизмом переключения «на лету».
Усилитель может обеспечить электронную коммутацию и контур тока. Вследствие крутящего момента двигателя, возможно являющегося пропорциональным (Kt) току, может быть достигнуто управление крутящим моментом. ПИД-регулирование может реагировать на ошибку позиционирования для ее минимизации. Для достижения этого ПИД-контроллер может подавать пропорциональную, интегральную и производную величины по сигналу ошибки. Режим переключения «на лету» может обеспечить, чтобы во время перехода ни один сигнал ошибки не мог восприниматься. Это может быть достигнуто постепенным увеличением или уменьшением трех параметров ПИД.
Принцип управления изображен на блок-схеме, показанной на фиг.5, которая предоставляет обзор всех функций контроллера двигателя. Функции локализуются в сервоконтроллере и в элементе управления. Усилитель обеспечивает коммутацию и контур управления. Заданный ток генерируется PID-контроллерами и смещением по прямой связи. Обратная связь по положению двигателя может быть обеспечена абсолютным кодером с высоким разрешением.
В случае, если обеспечена система, управляемая по прямой связи, то заданный ток может быть определен алгоритмом прямой связи, в частности, в зависимости от заданных значений положения, скорости и ускорения и параметров массы, демпфирования, трения и дисбаланса. В данном случае заданный ток может быть, в частности, равен току смещения. ПИД-контроллер может корректировать отклонения модели прямой связи.
В режиме ПИД-регулирования или в режиме управления положением или скоростью переключатели в элементе «переключателя входного сигнала действительной/заданной величины» и «включение/выключение PID» в сервоконтроллере устанавливаются на «режим A». Алгоритм прямой связи может вычислить или определить ожидаемый ток двигателя на основании, например, физической модели перемещения. Модель может содержать параметры, подобные трению, демпфированию, массе и дисбалансу, и может ссылаться на соответствующую физическую формулу. Если моделирование совпадает, в частности по существу полностью совпадает с моделируемой реальной системой, то воздействие ПИД-контроллера на заданное значение тока в усилителе может не потребоваться. В данном теоретическом случае перемещение рентгенографической системы 2 может следовать требуемой или желаемой траектории без поддержки ПИД-контроллера. Соответствующая модель может также использоваться в качестве эталона для настроек содействия режима содействия.
Во время режима содействия ПИД-управление отключается, и заданные значения перемещения замещаются действительными значениями из дифференцирующего фильтра, в отличие от режима ПИД, где соответствующие значения подаются задающим генератором. В режиме содействия механизм прямой связи может оставаться активным, но ее степень может быть снижена до требуемого уровня содействия. В режиме содействия прямая связь по дисбалансу может быть добавлена полностью. Воздействие демпфирования может использоваться во избежание слишком высокой скорости, заданной вручную, например, обеспечением противодействующей силы, которая может привести к существенному снижению механической выходной мощности двигателя или обеспечиваемого двигателем движения или даже к противодействию или даже сопротивлению, и в этом случае Pd может даже быть ниже нуля.
Полученными параметрами или факторами Pm, Pd и Pf может регулироваться требуемое или желаемое содействие. В режиме содействия эти параметры могут составлять от 0 и менее чем 1, в то время как в режиме ПИД параметры могут быть равны 1. Допустимый диапазон факторов составляет от 0 до 1 с включением обоих пределов.
Действительная скорость и ускорение получается дифференцированием и фильтрацией обратной связи по действительному положению, которая выполняется в дифференцирующем фильтре. Перемещение может, в частности, активироваться, когда контроллер перемещения детектирует смещение положения.
Может также осуществляться предпочтительное позиционирование. Путем использования режима содействия может осуществляться остановка в предварительно запрограммированных положениях. Пользователь обеспечивает ручное указание желаемого направления движения, в котором может быть расположено запрограммированное положение. Вблизи этого положения управление может быть автоматически заблокировано ПИД-контроллером положения для вынуждения к плавной и точной остановке в предварительно запрограммированном положении. Контроллер пользовательских режимов обеспечивает плавное переключение режима управления от контура тока на контур ПИД-регулирования. После остановки движения режим содействия может быть снова доступен.
Кроме того, может быть осуществлен режим торможения, который по существу равен остановке в предпочтительном положении, как описано ранее. Функция удержания/торможения может быть также реализована удерживанием положения в режиме ПИД-регулирования только при активации двигателя, когда удерживается положение торможения.
На фиг.6 изображен иллюстративный вариант осуществления способа, выполняемого двигателем позиционирования в соответствии с настоящим изобретением.
Представлен способ перемещения 46, обеспечиваемого двигателем, содержащий этапы, на которых прикладывают 48 внешнюю силу к узлу перемещения с помощью двигателя, в качестве ручного указания желаемого перемещения узла перемещения с помощью двигателя, относительно поверхности, детектируют 50 внешнюю силу в двигательной компоновке или двигательном элементе и обеспечивают 52 желаемое перемещение.
Следует отметить, что термин «содержащий» не исключает других элементов или этапов и что единственное число не исключает множественного числа. Также элементы, описанные в связи с различными вариантами осуществления, могут комбинироваться.
Следует также отметить, что условные обозначения в формуле изобретения не должны рассматриваться как ограничивающие объем формулы изобретения.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
2 - Рентгенографическая система
4 - Генератор рентгеновского излучения
6 - Детектор рентгеновского излучения
7 - Рентгеновское излучение
8 - Колесная компоновка
9 - Колеса
10 - Объект
12 - Оператор
14 - Желаемое направление перемещения
15 - Рукоятка
16 - Указание желаемого движения
18a, 18b, 18c - Двунаправленное колесо
19 - Узел перемещения с помощью двигателя
20a, 20b, 20c - Первое направление
22a, 22b, 22c - Второе направление
24 - Первый вращающийся элемент
26 - Второй вращающийся элемент
28 - Ось
30 - Перемещение узла, перемещения с помощью двигателя /итоговое перемещение
32 - Перемещение первого вращающегося элемента
34 - Перемещение второго вращающегося элемента
36 - Перемещение колеса по суммарному вектору
38 - Точка поворота
40 - Первый двигательный элемент
42 - Второй двигательный элемент
44 - Система управления движением
46 - Способ перемещения, обеспечиваемого двигателем
48 - Этап: приложить внешнюю силу к узлу перемещения с помощью двигателя
50 - Этап: детектировать внешнюю силу в двигательной компоновке или двигательном элементе
52 - Этап: обеспечить желаемое движение
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ РУЧНОГО ПЕРЕМЕЩЕНИЯ С ПОДДЕРЖКОЙ ОТ ДВИГАТЕЛЬНОГО ПРИВОДА, РЕНТГЕНОВСКАЯ СИСТЕМА, СОДЕРЖАЩАЯ ТАКОЙ УЗЕЛ, СПОСОБ И ПРИМЕНЕНИЕ | 2010 |
|
RU2573047C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ РЕНТГЕНОЛОГИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ | 2012 |
|
RU2633275C2 |
| ФИЛЬТРУЮЩЕЕ УСТРОЙСТВО ДЛЯ КОМПЬЮТЕРНЫХ ТОМОГРАФИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2491021C2 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И/ИЛИ СЧИТЫВАНИЯ НА/С НОСИТЕЛЯ МАГНИТНО-ОПТИЧЕСКОЙ ИНФОРМАЦИИ | 1990 |
|
RU2068201C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И/ИЛИ ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ С МАГНИТООПТИЧЕСКОГО НОСИТЕЛЯ | 1990 |
|
RU2067321C1 |
| СИСТЕМА КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2663258C1 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2012 |
|
RU2604634C2 |
| РЕНТГЕНОДЕФЕКТОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КОЛЬЦЕВЫХ СВАРНЫХ ШВОВ ТРУБОПРОВОДОВ | 2010 |
|
RU2533760C2 |
| СИСТЕМЫ И СПОСОБЫ, ИСПОЛЬЗУЕМЫЕ ПРИ СВАРКЕ СЕГМЕНТОВ ТРУБЫ В ТРУБОПРОВОДЕ | 2015 |
|
RU2708721C2 |
| МЕДИЦИНСКОЕ УСТРОЙСТВО С УЛЬТРАЗВУКОВЫМИ ПРЕОБРАЗОВАТЕЛЯМИ, ВСТРОЕННЫМИ В ГИБКУЮ ПЛЕНКУ | 2011 |
|
RU2573443C2 |
Изобретение относится к осуществляемому двигателем перемещению, в частности к мобильным рентгенографическим системам. Рентгенографическая система содержит устройство, генерирующее рентгеновское излучение и детектор рентгеновского излучения, функционально соединенные для получения рентгеновских изображений объекта, подлежащего обследованию. Рентгенографическая система дополнительно содержит узел перемещения с помощью двигателя, содержащий, по меньшей мере, одно двунаправленное колесо и двигательную компоновку, связанную с ним. Узел перемещения с помощью двигателя выполнен с возможностью перемещения по поверхности, а двунаправленное колесо выполнено с возможностью перемещения рентгенографической системы по поверхности и с возможностью вращения, по меньшей мере, в первом направлении и, по меньшей мере, во втором направлении, причем указанные направления являются непараллельными. Узел перемещения с помощью двигателя выполнен с возможностью детектирования указания желаемого перемещения рентгенографической системы относительно поверхности, причем рентгенографическая система выполнена с возможностью детектировать, по меньшей мере, ручное указание желаемого перемещения, предоставленное оператором, а двигательная компоновка выполнена с возможностью помогать в перемещении узла перемещения с помощью двигателя относительно поверхности в соответствии с указанием. Способ обеспечиваемого двигателем перемещения содержит этапы, на которых прикладывают вручную внешнюю силу к рентгенографической системе в качестве указания желаемого перемещения, которое представляет собой силу, обеспечиваемую вручную рентгенографической системе оператором, детектируют внешнюю силу в двигательной компоновке или двигательном элементе и обеспечивают желаемое перемещение. Использование изобретения позволяет позиционировать с высокой точностью тяжелые объекты в конкретных ограниченных пространствах. 2 н. и 11 з.п. ф-лы, 6 ил.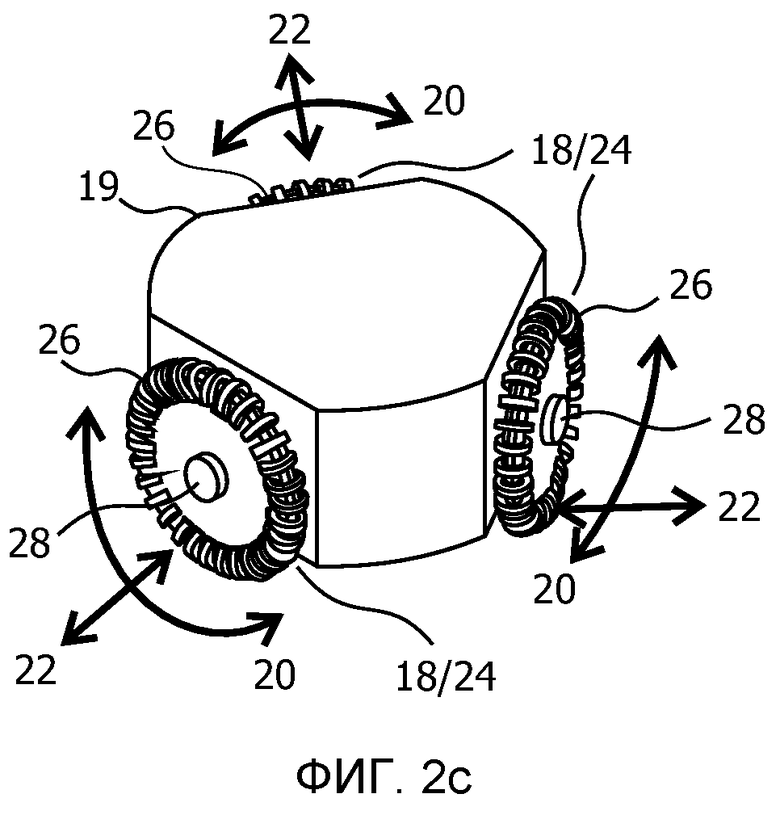
1. Рентгенографическая система (2), содержащая
устройство (4), генерирующее рентгеновское излучение; и
детектор (6) рентгеновского излучения;
причем устройство (4), генерирующее рентгеновское излучение, и детектор (6) рентгеновского излучения функционально соединены для получения рентгеновских изображений объекта (10), подлежащего обследованию;
причем рентгенографическая система дополнительно содержит узел (19) перемещения с помощью двигателя, содержащий, по меньшей мере, одно двунаправленное колесо (18); и двигательную компоновку, связанную, по меньшей мере, с одним двунаправленным колесом (18);
причем узел (19) перемещения с помощью двигателя выполнен с возможностью перемещения по поверхности;
причем, по меньшей мере, одно двунаправленное колесо (18) выполнено с возможностью перемещения рентгенографической системы (2) по поверхности;
причем, по меньшей мере, одно двунаправленное колесо (18) выполнено с возможностью вращения, по меньшей мере, в первом направлении (20) и, по меньшей мере, во втором направлении (22), причем первое направление (20) и второе направление (22) являются непараллельными;
причем узел (19) перемещения с помощью двигателя выполнен с возможностью детектирования указания желаемого перемещения (16) рентгенографической системы (2) относительно поверхности;
причем рентгенографическая система выполнена с возможностью детектировать, по меньшей мере, ручное указание желаемого перемещения, предоставленное оператором; и
двигательная компоновка выполнена с возможностью помогать в перемещении узла перемещения с помощью двигателя относительно поверхности в соответствии с указанием.
2. Рентгенографическая система по п. 1, в которой, по меньшей мере, одно двунаправленное колесо (18) содержит, по меньшей мере, один первый вращающийся элемент (24); и, по меньшей мере, один второй вращающийся элемент (26);
причем, по меньшей мере, один первый вращающийся элемент (24) выполнен с возможностью вращения в первом направлении (20); и
причем, по меньшей мере, один второй вращающийся элемент (26) выполнен с возможностью вращения во втором направлении (22).
3. Рентгенографическая система по п. 1 или 2, в которой двигательная компоновка содержит, по меньшей мере, один первый двигательный элемент (40), связанный, по меньшей мере, с одним двунаправленным колесом (18), в частности, по меньшей мере, с одним первым вращающимся элементом (24);
причем, по меньшей мере, один первый двигательный элемент (40) выполнен с возможностью перемещения узла (19) перемещения с помощью двигателя в первом направлении (20).
4. Рентгенографическая система по п. 1 или 2, в которой двигательная компоновка дополнительно содержит, по меньшей мере, один второй двигательный элемент (42), связанный, по меньшей мере, с одним двунаправленным колесом (18), в частности, по меньшей мере, с одним вторым вращающимся элементом (26);
причем, по меньшей мере, один второй двигательный элемент (42) выполнен с возможностью перемещения узла (19) перемещения с помощью двигателя во втором направлении (22).
5. Рентгенографическая система по п. 1 или 2, в которой двигательная компоновка, первый двигательный элемент (40) и/или второй двигательный элемент (42) выполнены с возможностью детектирования указания желаемого перемещения (16), силы и/или крутящего момента, действующего на двигательную компоновку, первый двигательный элемент (40) и/или второй двигательный элемент (42).
6. Рентгенографическая система по п. 1 или 2, в которой указание (16) представляет собой ручное указание.
7. Рентгенографическая система по п. 1 или 2, в которой узел (19) перемещения с помощью двигателя содержит, по меньшей мере, один режим, выбранный из группы, состоящей из режима привода, режима захвата, режима свободного хода, режима торможения, режима содействия двигателя, режима позиционирования и моторизованного режима.
8. Рентгенографическая система по п. 1 или 2, в которой узел (19) перемещения с помощью двигателя выполнен с возможностью автоматического повторного позиционирования.
9. Рентгенографическая система по п. 1 или 2, в которой двигательная компоновка выполнена с возможностью содействия перемещению узла перемещения с помощью двигателя, по меньшей мере, частичным уменьшением воспринимаемого сопротивления движению и/или движущей силы узла (19) перемещения с помощью двигателя.
10. Рентгенографическая система по п. 1 или 2, дополнительно содержащая элемент управления движением для управления перемещением узла (19) перемещения с помощью двигателя относительно поверхности.
11. Рентгенографическая система по п. 10, в которой двигательная компоновка представляет собой двигательную компоновку прямого привода.
12. Рентгенографическая система по п. 1 или 2, в которой рентгенографическая система представляет собой одну из мобильной рентгенографической системы и дугообразной системы.
13. Способ обеспечиваемого двигателем перемещения (46) рентгенографической системы, содержащий этапы, на которых:
прикладывают (48) вручную внешнюю силу к рентгенографической системе (2) по любому из предыдущих пп. 1-12 в качестве указания желаемого перемещения (16) рентгенографической системы (2) относительно поверхности;
причем указание представляет собой силу, обеспечиваемую вручную рентгенографической системе оператором при инициировании желаемого перемещения, детектируют (50) внешнюю силу в двигательной компоновке или двигательном элементе;
причем двигательная компоновка выполнена с возможностью содействовать желаемому перемещению рентгенографической системы в соответствии с упомянутым указанием, и
обеспечивают (52) желаемое перемещение.
| US 6131690 A, 17.10.2000 | |||
| WO 8603132 A1, 05.06.1986 | |||
| US 7056185 B1, 06.06.2006 | |||
| US 6409382 B1, 25.06.2002 | |||
| Экстрактор для растительного сырья | 1984 |
|
SU1346666A1 |
| EP 768076 A1, 16.04.1997 | |||
| МОБИЛЬНЫЙ МАЛОГАБАРИТНЫЙ РЕНТГЕНОВСКИЙ АППАРАТ | 2006 |
|
RU2334465C1 |

