Изобретение относится к области электрической стимуляции мышц. Более конкретно, изобретение относится к способу подачи электрического сигнала стимуляции мышц в ткань тела, которая контактирует с мышечной тканью, а также к устройству для электрической стимуляции мышечной ткани.
Уровень техники
Электрическая стимуляция или функциональная электрическая стимуляция (ФЭС) мышц является хорошо известным применением, например, в областях постинсультной реабилитации, реабилитации при повреждении спинного мозга, лечения недержания и спортивной подготовки.
Из WO 2007/017778 A2 известно устройство для электрической стимуляции мышечной ткани, которое имеет электродную систему с матрицей электродов. Устройство снабжено переключателем электродов для выбора одной или более стимулирующих электродных накладок. В одном примере, после размещения электродной системы на коже пользователя, измеряется сопротивление между каждой электродной накладкой и кожей, и на основе измеренного сопротивления выбирается один или более стимулирующих электродных накладок. В другом примере стимулирующие электродные накладки могут быть выбраны на основании области, в которой мышца проявляет наименьшую активность. Устройство может применяться для стимуляции мышечной ткани посредством подачи электрического сигнала, в результате чего мышечная ткань поочередно сокращается и расслабляется. Перед стимуляцией мышечной ткани выполняют первое измерение активности мышечной ткани, а после стимуляции мышечной ткани выполняют второе измерение активности мышечной ткани. Таким образом, может быть определен эффект стимуляции в отношении активности мышечной ткани. Значения активности, определяемой до и после стимуляции, могут быть выведены на пользовательский интерфейс.
Сущность изобретения
Было бы желательно обеспечить возможность нахождения местоположений, подходящих для электрической стимуляции мышечной ткани удобным способом и/или без необходимости в изменении положения электрода или стимулирующего устройства.
Также было бы желательно обеспечить возможность нахождения подходящего местоположения для электрической стимуляции мышечной ткани в момент активации соответствующей мышцы. При активации мышцы оптимальное местоположение электрической стимуляции может отличаться от оптимального местоположения стимуляции в неактивном состоянии мышцы.
Также было бы желательно обеспечить возможность нахождения местоположения, подходящего для электрической стимуляции мышечной ткани в нестатическом состоянии, например, в момент, когда соответствующая мышца сокращается или расслабляется. В ходе сокращения или расслабления мышцы местоположение, подходящее для стимуляции мышечной ткани, может изменяться. Изменение местоположения, подходящего для стимуляции определенной мышцы, также может быть вызвано активацией или сокращением, или расслаблением другой мышцы.
Также было бы желательно обеспечить возможность отслеживать движение или изменение местоположения, подходящего для электрической стимуляции мышечной ткани в нестатическом состоянии, как описано.
Было бы желательно обеспечить возможность улучшения стимуляции мышц без необходимости вживления электродов. Вживление электродов является инвазивной, дорогостоящей и опасной процедурой и, таким образом, ограничивается особыми случаями.
В частности, было бы желательно обеспечить возможность нахождения местоположения, подходящего для электрической стимуляции мышечной ткани с помощью устройства, которое может быть применено извне на коже, расположенной над указанной мышечной тканью.
Также было бы желательно обеспечить возможность удобной локализации местоположения, подходящего для электрической стимуляции мышечной ткани, для стимуляции определенной мышцы в группе мышц.
Для более полного рассмотрения одной или более указанных задач, в первом аспекте изобретения предложен способ подачи электрического сигнала стимуляции мышц в ткань тела, которая контактирует с мышечной тканью, включающий в себя этапы, на которых:
- размещают матрицу электродов, включающую в себя множество электродов в электрическом контакте с указанной тканью тела;
- активируют указанные электроды в соответствии с последовательностью схем активации, причем каждая схема активации определяет подгруппу активируемых электродов, при этом каждая соответствующая подгруппа состоит по меньшей мере из одного электрода, посредством подачи электрического сигнала стимуляции мышц в указанную ткань тела по меньшей мере через один электрод из соответствующей подгруппы, и
- измеряют, поочередно с указанной активацией электродов в соответствии со схемой активации, ответный сигнал, связанный со схемой активации, посредством регистрации параметра указанной мышечной ткани, который формирует величину активности указанной мышечной ткани, в ответ на электрический сигнал стимуляции, поданный через указанный по меньшей мере один электрод схемы активации в указанную ткань тела, контактирующую с указанной мышечной тканью. Например, этап измерения проводят после каждого выполнения этапа активации.
Такой способ позволяет тестировать различные схемы активации электродов на их эффективность при стимуляции целевой мышечной ткани. Таким образом, схема активации, соответствующая подходящему местоположению электрической стимуляции, может быть определена автоматически. Это выгодно в частности в таких применениях, когда указанное местоположение может изменяться, например, вследствие движения мышечной ткани под кожей, на которой расположена матрица электродов. Таким образом, подходящая схема активации мышцы может быть определена как в статическом (без сокращения или без изменения сокращения мышцы), так и динамическом (при сокращении стимулируемой мышцы или сокращения и/или расслабления групп мышц в той же области) состоянии.
Кроме того, способ позволяет размещать матрицу электродов с более низкой степенью точности, не влияющей на стимуляцию мышечной ткани, поскольку для стимуляции может быть выбран один или более электродов матрицы электродов в зависимости от измеренных ответных сигналов, притом, что указанные электроды присутствуют в области, подходящей для подачи стимулирующего сигнала. Кроме того, так как матрица электродов может быть размещена с более низкой степенью точности, матрица электродов может быть размещена человеком, не имеющим профессиональных знаний о мышечной системе. Кроме того, размещение матрицы электродов отнимает меньше времени. Кроме того, для стимуляции могут использоваться сравнительно небольшие электроды, например, вместо одной пары больших электродов, достаточно больших, чтобы гарантированно покрывать область, подходящую для стимуляции. Большие внешние электроды могут вызывать болезненные ощущения из-за большого тока и/или напряжения, требуемого для стимуляции. Кроме того, большие электроды не подходят для групп мышц меньшего размера. Кроме того, большие электроды могут иметь побочные эффекты, такие как стимуляция других мышц или других типов нервов под электродом (например, болевых нервов, чувствительных нервов).
Например, электроды могут быть электродными накладками или поверхностными электродами. В сравнении, например, с игольчатыми электродами они обладают преимуществом, поскольку являются менее инвазивными.
Например, после каждой активации электродов в соответствии со схемой активации, подача стимулирующего сигнала прекращается или останавливается, и, в течение паузы стимуляции, измеряется ответный сигнал.
В частности, указанная последовательность схем активации может быть последовательностью различных схем активации. При измерении ответного сигнала, связанного с соответствующей схемой активации, может быть определена схема активации, подходящая или наиболее подходящая для электрической стимуляции указанной мышечной ткани. Таким образом, подходящее для стимуляции местоположение или схема активации могут быть определены без изменения положения матрицы электродов.
Например, указанная ткань тела может включать кожу над мышечной тканью. Альтернативно, например, указанная ткань тела может являться частью указанной мышечной ткани.
Этапы активации указанных электродов в соответствии с последовательностью схем активации и, поочередно с указанной активацией электродов в соответствии со схемой активации, измерения ответного сигнала, связанного со схемой активации, также будут обозначены ниже как "этапы поиска" или "процесс поиска". Например, указанные этапы повторяются. В случаях, когда, например, подходящее местоположение для электрической стимуляции изменяется в пределах области, охваченной матрицей электродов, в результате сокращения или расслабления мышцы, способ позволяет, например, автоматически отслеживать подходящее местоположение для стимуляции.
Например, указанное измерение ответного сигнала является электромиографическим измерением.
Полезные особенности изобретения указаны в зависимых пунктах формулы.
Например, способ может дополнительно включать следующий этап.
Выбор по меньшей мере одного из множества электродов на основе измеряемых ответных сигналов. Например, может быть выбран по меньшей мере один подходящий электрод, в частности наиболее подходящий для стимуляции мышечной ткани. Например, по меньшей мере один электрод может быть выбран для стимуляции мышечной ткани. Например, по меньшей мере один из множества электродов может быть выбран на основе величины измеренных ответных сигналов. Впрочем, выбор указанного по меньшей мере одного из множества электродов не обязательно сопровождается стимуляцией выбранным по меньшей мере одним электродом. Например, выбор по меньшей мере одного из множества электродов, подходящих для стимуляции на основании измеренных ответных сигналов, может служить для сбора информации, например, для определения ориентации части тела, как будет дополнительно описано ниже.
Например, на основе выбора по меньшей мере одного электрода, подходящего для стимуляции мышечной ткани, может быть определено положение матрицы электродов относительно указанной мышечной ткани. Таким образом, может быть определено положение матрицы электродов относительно части тела. Таким образом, положение устройства, которое находится в неподвижном положении относительно матрицы электродов, может быть определено относительно части тела. Например, указанное устройство может быть объединено с матрицей электродов. Например, указанное устройство может включать в себя акселерометр. Таким образом, может быть определено положение акселерометра относительно части тела. Таким образом, показания акселерометра могут быть связаны с движением указанной части тела на основании определенного положения акселерометра.
Например, указанный по меньшей мере один из множества электродов выбирают на основе критерия, подходящего для определения активности мышцы по ответному сигналу, в частности критерия, подходящего для определения наивысшей активности мышцы на основе ответного сигнала. Например, указанный по меньшей мере один из множества электродов выбирают на основе по меньшей мере одного из следующих критериев:
- максимальная двойная амплитуда ответного сигнала,
- наибольшая площадь под кривой ответного сигнала,
- наиболее высокая скорость увеличения ответного сигнала и
- наиболее высокая скорость уменьшения ответного сигнала.
Не желая быть связанными с какой-либо теорией, предполагается, что указанные критерии являются выражением величины ответных сигналов, указывающей на эффективность стимуляции указанной мышечной ткани согласно соответствующей схеме активации. Например, указанный по меньшей мере один из множества электродов может быть выбран на основе величины активности мышцы, выражаемой измеренными ответными сигналами. Предполагается, что указанные критерии выражают величину активности мышцы в ответ на электрическую стимуляцию согласно схеме активации. Кроме того, предполагается, что такая схема активации является подходящей схемой активации для стимуляции мышечной ткани.
Например, выбор по меньшей мере одного из множества электродов на основании измеренных ответных сигналов может включать сравнение всех ответных сигналов или сравнение величины ответных сигналов.
Например, по меньшей мере один из множества электродов может быть выбран путем выбора по меньшей мере одной из схем активации. Кроме того, например, может быть выбрана подгруппа электродов, которая соответствует комбинации по меньшей мере двух из схем активации. Таким образом, могут быть выбраны электроды, соответствующие комбинации наиболее перспективных схем активации для стимуляции мышечной ткани.
В одном варианте осуществления способ дополнительно включает:
- выборочную подачу через указанный выбранный по меньшей мере один электрод и через указанную ткань тела электрического сигнала стимуляции мышц в указанную мышечную ткань. Таким образом, способ может являться способом электрической стимуляции мышечной ткани. Указанный способ обладает дополнительным преимуществом, так как позволяет автоматически определять подходящее местоположение для стимуляции и подавать сигнал стимуляции в мышечную ткань. Это может позволять стимулировать мышцу в местоположении, подходящем для стимуляции, даже в ситуации, когда мышца активирована, или, в более общем смысле, когда местоположение для стимуляции изменяется после размещения матрицы электродов.
Например, на указанном этапе активации указанных электродов в соответствии с последовательностью схем активации, в указанную ткань тела можно подавать электрический сигнал стимуляции мышц, соответствующий интенсивности стимуляции, которая ниже, чем интенсивность стимуляции, соответствующая электрическому сигналу стимуляции мышц, выборочно подаваемому через выбранный по меньшей мере один электрод для стимуляции. Таким образом, в ходе процесса поиска при тестировании различных схем активации, интенсивность стимуляции ниже, чем интенсивность стимуляции в последующем этапе выборочной подачи сигнала стимуляции. Таким образом, минимизируется зависимость процесса поиска от текущего состояния мышечной ткани.
Например, интенсивность стимуляции на этапах поиска может быть ниже порога чувствительности. Например, интенсивность стимуляции может быть слегка выше порога стимуляции, но при этом достаточно низкой, чтобы не чувствоваться.
В одном варианте осуществления этапы активации указанных электродов в соответствии с последовательностью схем активации, измерения, поочередно с указанной активацией электродов в соответствии со схемой активации, ответного сигнала, связанного со схемой активации, и выбора по меньшей мере одного из множества электродов на основе измеренных ответных сигналов, повторяют поочередно с этапом выборочной подачи через выбранный, указанный по меньшей мере один электрод и через указанную ткань тела электрического сигнала стимуляции мышц в указанную мышечную ткань. Это позволяет выбирать электроды, соответствующие подходящему местоположению стимуляции, когда указанное местоположение изменяется, например, из-за движения. Таким образом, например, стимуляция, поддерживающая движение, может быть улучшена. Например, способ может позволять отслеживать подходящее местоположение стимуляции, чтобы поддержать движение.
В одном варианте осуществления способ дополнительно включает этап:
- определения ориентации части тела на основании измеренных ответных сигналов. Например, ориентация является ориентацией относительно особой ориентации. Это может обеспечивать преимущество создания дополнительных датчиков положения или движения, таких как акселерометры и гироскопы, избыточных для определения ориентации части тела.
Например, определение ориентации части тела на основании измеренных ответных сигналов может включать:
- определение состояния указанной мышечной ткани на основании измеренных ответных сигналов, и
- определение ориентации части тела на основании определенного состояния указанной мышечной ткани.
Состояние указанной мышечной ткани связано с ориентацией указанной части тела. Например, ориентация зависит от состояния активации указанной мышечной ткани. Например, при активации указанной мышечной ткани указанная часть тела может двигаться. В другом примере местоположение, подходящее для стимуляции, зависит от состояния мышечной ткани. Например, когда активирована мышца-антагонист, указанная мышечная ткань может двигаться и, таким образом, местоположение, подходящее для стимуляции указанной мышечной ткани, может изменяться.
Например, этапы активации указанных электродов в соответствии с последовательностью схем активации и измерения, поочередно с указанной активацией электродов в соответствии со схемой активации, ответного сигнала, связанного со схемой активации, повторяются, при этом способ дополнительно включает в себя этап:
- определения движения части тела на основе периодически измеряемых ответных сигналов.
Например, движение части тела может быть определено при последовательном определении ориентации части тела на основании измеренных ответных сигналов.
В одном варианте осуществления способа, этап выбора по меньшей мере одного из множества электродов на основе измеренных ответных сигналов, включает выбор по меньшей мере одного первого электрода и по меньшей мере одного второго электрода из множества электродов, на основе измеренных ответных сигналов, и этап выборочной подачи через указанный выбранный по меньшей мере один электрод и через указанную ткань тела электрического сигнала стимуляции мышц в указанную мышечную ткань включает выборочную подачу, по меньшей мере через один из указанного выбранного по меньшей мере одного первого электрода и указанного выбранного по меньшей мере одного второго электрода, и через указанную ткань тела, электрического сигнала стимуляции мышц по меньшей мере в одну из мышечной ткани первой мышцы и мышечной ткани второй мышцы.
Например, сигнал стимуляции мышц можно подавать в мышечную ткань мышцы в зависимости от состояния мышечной ткани той же мышцы и/или в зависимости от состояния мышечной ткани другой мышцы, причем указанное состояние определяют на основе измеренных ответных сигналов. Это позволяет, например, повысить безопасность стимуляции, предотвращая стимуляцию мышцы-антагониста, противодействующей активируемой мышце-агонисту. Кроме того, это позволяет улучшать устранение нежелательной мышечной активности, такой как тремор или спазматическая активность, посредством стимуляции антагониста.
Например, сигнал стимуляции мышц можно подавать в зависимости от ориентации части тела, которую определяют на основе измеренных ответных сигналов. Это способствует стимуляции мышц, осуществляемой в соответствии с желаемой последовательностью движения одной или более частей тела.
В другом аспекте изобретения предложено устройство для электрической стимуляции мышечной ткани, включающее:
- матрицу электродов, включающую множество электродов для размещения в электрическом контакте с тканью тела, которая контактирует с указанной мышечной тканью; матрица электродов выполнена с возможностью соединения с генератором сигналов для генерации электрического сигнала стимуляции мышц;
- переключатель электродов для выбора из множества электродов одного или более электродов для подачи электрического сигнала стимуляции от подсоединенного генератора сигналов в указанную ткань тела;
- датчик для измерения сигнала посредством регистрации параметра указанной мышечной ткани, который формирует величину активности указанной мышечной ткани; и
- блок управления для управления переключателем электродов и приема сигнала от датчика, причем блок управления выполнен с возможностью:
- активации указанных электродов в соответствии с последовательностью схем активации, причем каждая схема активации определяет подгруппу активируемых электродов, при этом каждая соответствующая подгруппа состоит по меньшей мере из одного электрода, путем управления переключателем электродов для выбора по меньшей мере одного электрода из соответствующей подгруппы для подачи электрического сигнала стимуляции мышц от генератора сигналов в указанную ткань тела через указанный по меньшей мере один электрод, и
- приема, поочередно с указанной активацией электродов в соответствии со схемой активации, ответного сигнала, связанного со схемой активации, от датчика.
Например, датчик может быть сформирован по меньшей мере одним из множества электродов.
Например, матрица электродов выполнена с возможностью соединения с генератором сигналов через переключатель электродов.
Например, электроды являются электродными накладками.
Например, устройство дополнительно включает указанный генератор сигнала.
Например, блок управления выполнен с возможностью:
- активации указанных электродов в соответствии с последовательностью схем активации, причем каждая схема активации определяет подгруппу активируемых электродов, при этом каждая соответствующая подгруппа состоит по меньшей мере из одного электрода, посредством подачи электрического сигнала стимуляции мышц от генератора сигнала в указанную ткань тела по меньшей мере через один электрод соответствующей подгруппы, выбираемой переключателем электродов, и
- приема, поочередно с указанной активацией электродов в соответствии со схемой активации, ответного сигнала, связанного со схемой активации, от датчика.
Например, блок управления включает отдельные блоки, например первый блок управления для управления переключателем электродов и/или генератором сигналов, и второй блок управления для приема соответствующего ответного сигнала. Например, первый блок управления является блоком электрической стимуляции мышц, а второй блок управления является блоком записи ЭМГ. Блоки могут быть двумя отдельными блоками или могут быть объединены в одном корпусе. Например, генератор сигналов расположен отдельно от устройства и соединяется с устройством.
В одном варианте осуществления блок управления также выполнен с возможностью выбора по меньшей мере одного из множества электродов на основе ответных сигналов. Например, блок управления дополнительно выполнен с возможностью сравнения ответных сигналов, связанных с соответствующими электродами и принятых блоком управления, и выбора по меньшей мере одного из множества электродов на основе сравнения ответных сигналов.
В одном варианте осуществления устройство дополнительно включает блок обработки сигналов для анализа ответного сигнала, принятого от датчика, причем блок обработки сигналов выполнен с возможностью определения критерия, подходящего для определения мышечной активности на основе ответного сигнала. Например, обработка сигналов предназначена для определения по меньшей мере одного из следующего:
- двойной амплитуды ответного сигнала,
- площади под кривой ответного сигнала,
- скорости увеличения ответного сигнала и
- скорости уменьшения ответного сигнала.
Указанные значения, как предполагают, являются показателем величины активности мышечной ткани.
Например, блок обработки сигналов выполнен с возможностью вывода значения, соответствующего величине активности мышечной ткани, выражаемой измеренным ответным сигналом. Например, ответное значение может быть одним из вышеуказанных значений.
Например, блок управления выполнен с возможностью осуществления способа, как описано выше.
Следующим аспектом изобретения является применение устройства, описанного выше, для терапевтического воздействия на мышцу.
В другом аспекте изобретения предложен компьютерный программный продукт, включающий программный код для осуществления способа, как описано выше, при запуске на программируемом устройстве.
Указанные и другие аспекты изобретения будут ясны из описанных ниже вариантов осуществления и проиллюстрированы со ссылкой на них.
Краткое описание чертежей
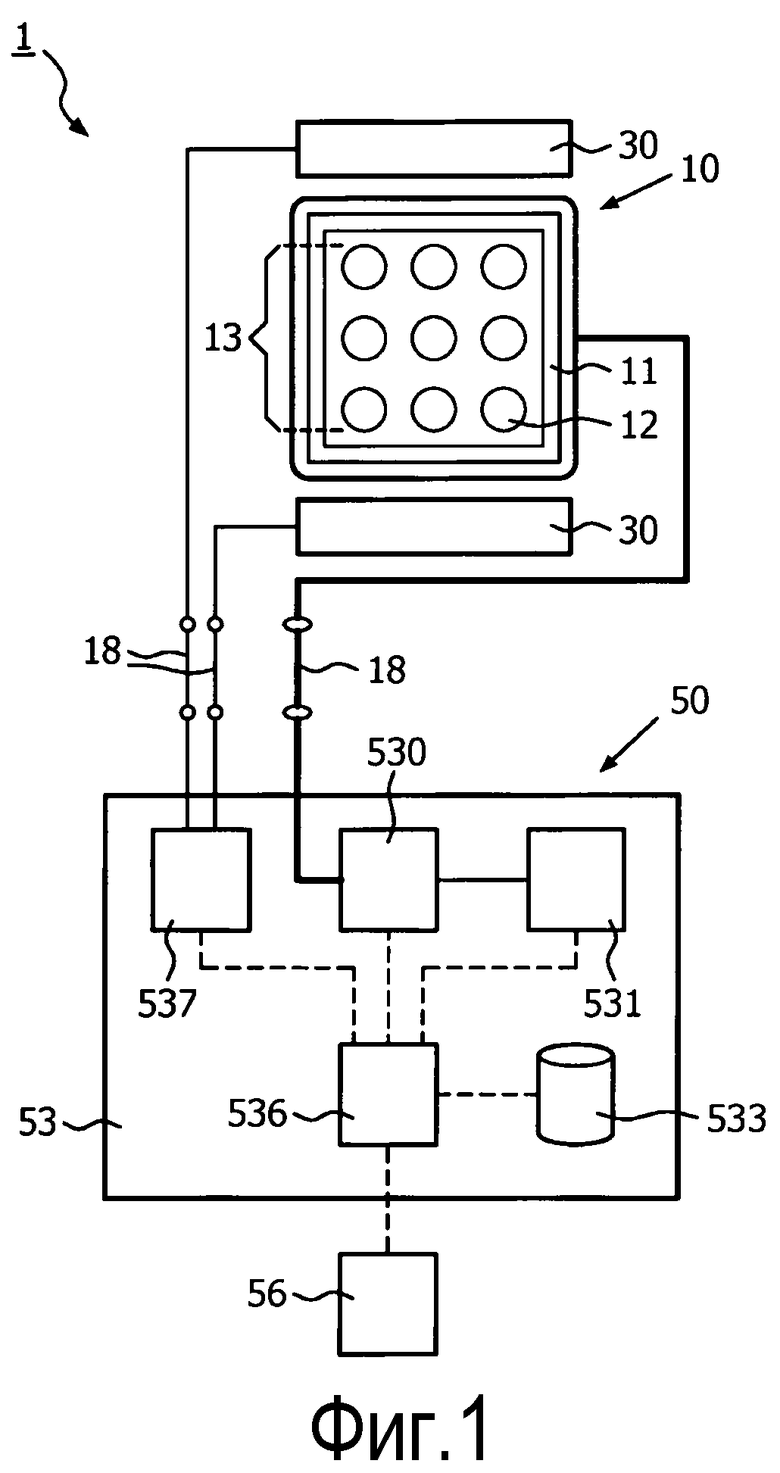
На Фиг. 1 показано схематическое изображение устройства для электрической стимуляции мышечной ткани.
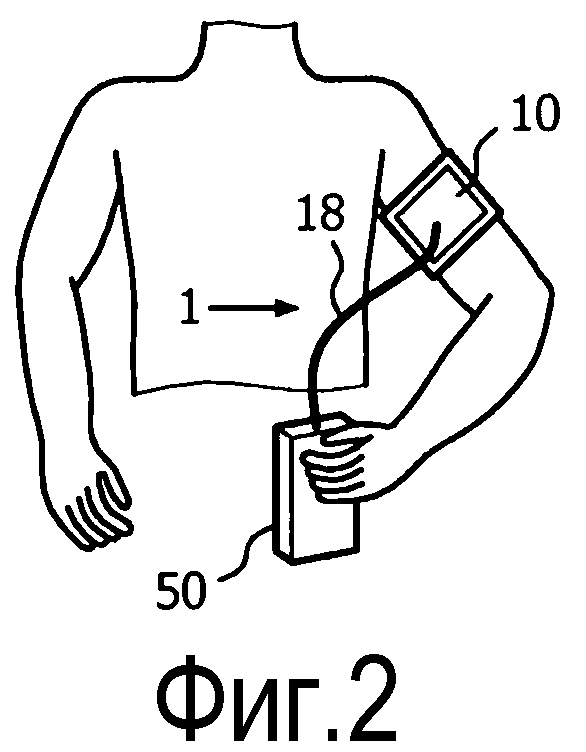
На Фиг. 2 схематично показано устройство Фиг. 1, матрица электродов, размещаемая на плече пользователя.
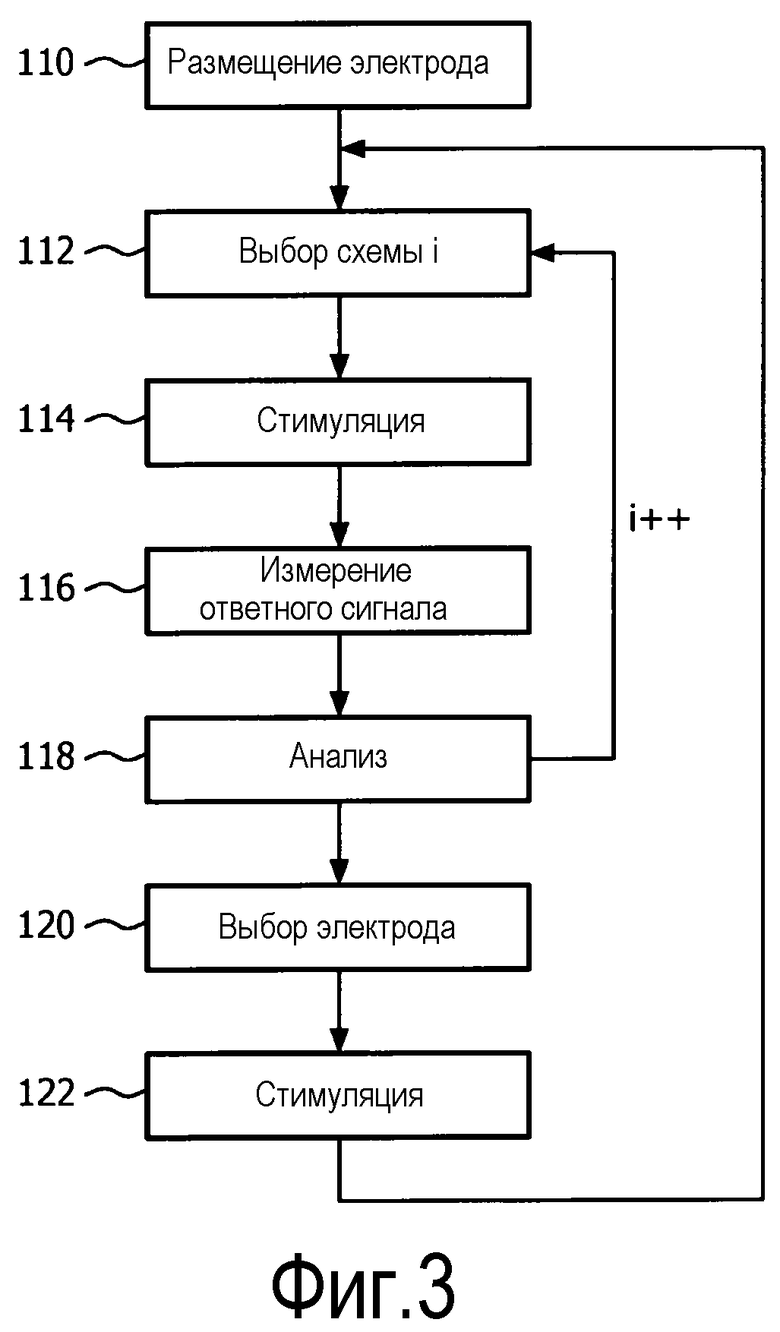
На Фиг. 3 показана блок-схема способа подачи электрического сигнала стимуляции мышц в ткань тела, которая контактирует с мышечной тканью.
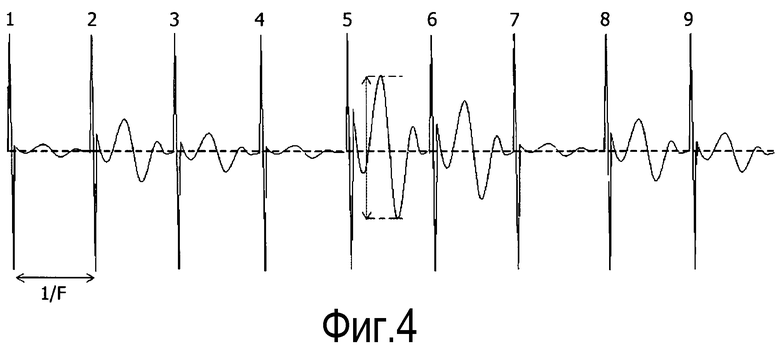
На Фиг. 4 схематично показан пример данных ЭМГ.
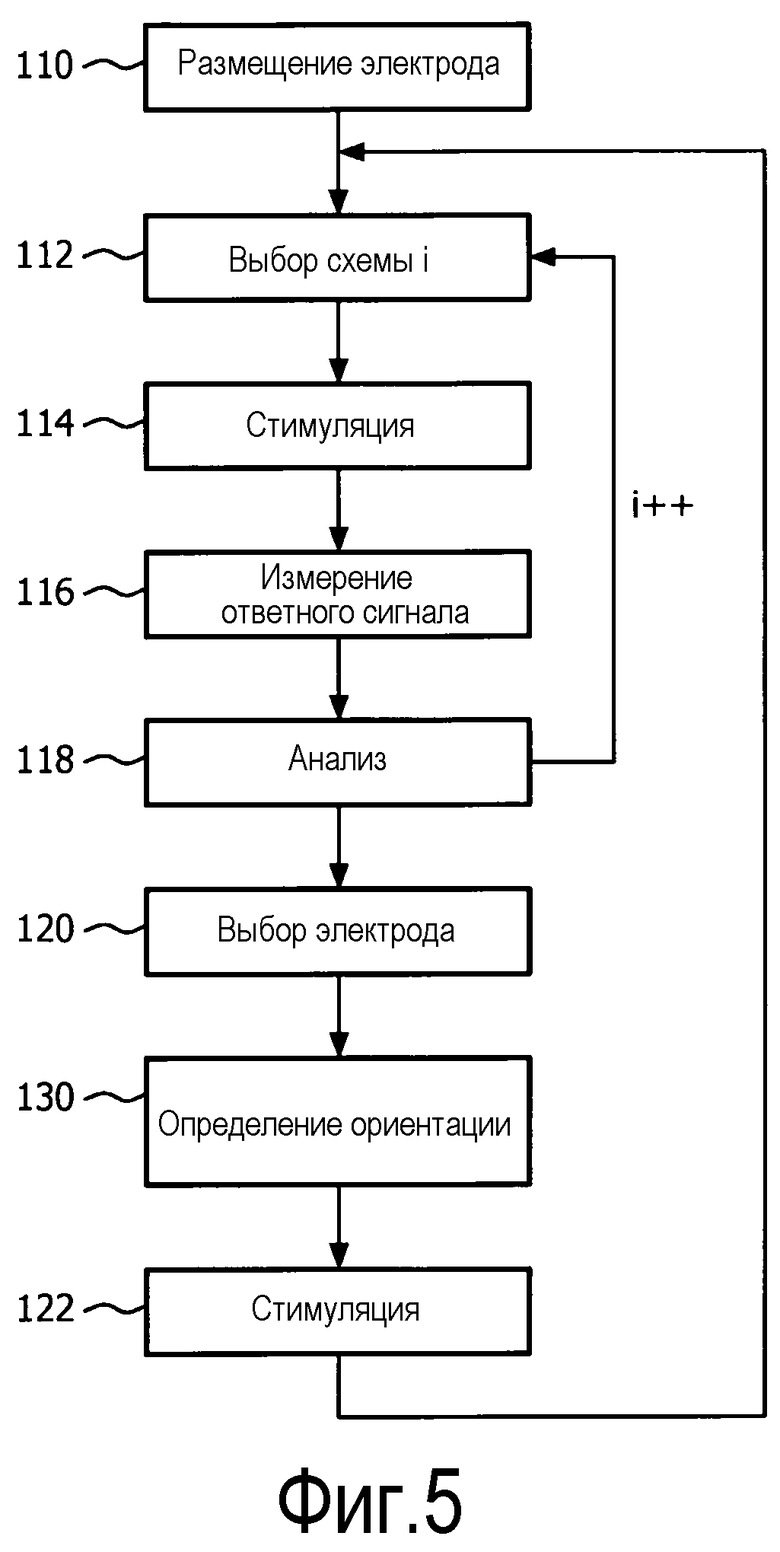
На Фиг. 5 схематично показан другой вариант осуществления способа подачи электрического сигнала стимуляции мышц в ткань тела, которая контактирует с мышечной тканью.
Подробное описание вариантов осуществления
Электростимулирующее устройство 1, показанное на Фиг. 1 и 2, включает в себя систему 10 электродов, которая может быть помещена на кожу животного, такого как человек. На Фиг. 2 система 10 электродов помещена на кожу плеча пользователя. Впрочем, система 10 электродов может быть помещена на другую часть тела и может иметь такую форму, которая соответствует форме определенной части тела. Например, в случае, если система 10 электродов должна быть помещена на спинную область тела, система 10 электродов может иметь удлиненную форму.
Система 10 электродов включает в себя, как показано на Фиг. 1, матрицу 13 электродов с множеством электродов 12 в форме электродных накладок. Кроме того, в примере Фиг. 1 система электродов включает в себя противоэлектрод 11. Противоэлектрод 11 действует в качестве заземления. В альтернативе, например, при стимуляции через подгруппу электродов 12, по меньшей мере один другой электрод 12 может действовать в качестве противоэлектрода или земли. Таким образом, специальный противоэлектрод 11 является необязательным.
Например, электроды в матрице 13 электродов расположены по прямым линиям, формируя прямоугольную матричную структуру. В примере Фиг. 1, матрица представляет собой матрицу 3×3, однако матрица может иметь другие размеры, например, меньше или больше. Дополнительно, расстояние между колонками матрицы может отличаться от расстояния между рядами матрицы. Кроме того, матрица, как показано в примере на Фиг. 1, может быть квадратной. Кроме того, матрица может иметь некоторое количество колонок, которое отличается от количества рядов. Кроме того, электроды 12 также могут быть расположены в непрямоугольной конфигурации, например, в круглой конфигурации или треугольной конфигурации.
В примере на Фиг. 1 противоэлектрод 11 имеет форму замкнутого контура и окружает матрицу 13 электродов. Впрочем, противоэлектрод 11 может иметь другую форму и может, например, проходить по криволинейному пути между электродами 12.
Система 10 электродов может быть помещена на коже так, чтобы электроды 12 и противоэлектрод 11 приходили в электрический контакт с кожей, то есть тканью тела, которая контактирует с мышечной тканью под кожей. При этом матрица 13 электродов приходит в электрический контакт с указанной мышечной тканью и, в частности, сможет принимать или передавать электрический сигнал в область мышцы под участком кожи, на котором находится матрица 13 электродов. В частности электроды 12 смогут вводить, через кожу, ток в мышечную ткань в форме сигнала стимуляции мышц для стимуляции мышечной ткани.
Как показано на Фиг. 1, устройство 1 также включает в себя операционный блок 50, который связан с матрицей электродов 10 через соединение 18. В примере на Фиг. 1 соединение 18 представляет собой проводное соединение. Впрочем, соединение 18 также может быть беспроводным соединением. Например, система электродов 10 может питаться от батареи и включать в себя радиопередатчик/приемник.
Операционный блок 50 может принимать сигналы, генерируемые системой 10 электродов, и управлять работой системы 10 электродов, как более подробно описано ниже.
Электроды 12 и противоэлектрод 11 могут быть расположены на поверхности гибкого, предпочтительно эластичного, носителя. Это позволяет системе электродов принимать форму части тела, на которую помещают систему 10 электродов. Носитель может быть снабжен электрическими компонентами, соединяющими электроды 12 и противоэлектрод 11, через соединение 18, с операционным блоком 50.
Например, операционный блок 50 включает корпус. Во внутренней части корпуса помещен блок 53 управления, который соединен с системой 10 электродов через соединение 18, а также соединен с необязательным пользовательским интерфейсом 56. Пользовательский интерфейс 56 может включать в себя, например, дисплей, формирующий интерфейс вывода для вывода информации пользователю устройства 1, и кнопки управления, формирующие интерфейс ввода. Например, пользователь может осуществлять ввод в блок 53 управления через пользовательский интерфейс 56, например, вводить желаемые параметры настройки для операции, выполняемой устройством. В данном примере интерфейс вывода позволяет выводить данные визуально, впрочем, данные, альтернативно или дополнительно, могут быть выведены в аудиоформате или любым другим подходящим образом.
Блок 53 управления, как показано на Фиг. 1, включает в себя переключатель 530 электродов для выбора из электродов 12 в матрице 13 электродов одного или более стимулирующих электродов. Например, система 10 электродов может включать в себя блоки переключения линий и блоки переключения рядов для подключения к электродам 10. Впрочем, например, система 10 электродов может включать в себя блоки подключения электродов, приспособленные для независимого подключения к отдельным электродам 12 и их комбинациям. Это позволяет произвести выбор стимулирующих электродов в соответствии с любой схемой или подгруппой активации электродов 12, применяемых для стимуляции.
Генератор 531 сигналов соединен с переключателем 530 электродов. В процессе работы генератор 531 сигналов подает электрический сигнал стимуляции мышц на стимулирующие электродные накладки, выбранные переключателем 530 электродов в соответствии со схемой активации. Электрический сигнал стимуляции передается через стимулирующие электроды 12 на поверхность, на которой помещена система электродов 10, например на кожу. При этом сигнал электродов проникает через кожу в мышечную ткань, в результате чего мышечная ткань может сокращаться. Таким образом, мышечная ткань стимулируется.
Значения параметров стимуляции, такие как, например, количество тока и продолжительность периода стимуляции, могут быть определены генератором 531 сигналов на основании данных, сохраненных в памяти генератора 531 сигналов. Генератор 531 сигналов соединен с программируемым микропроцессором 536, который, например, устанавливает параметры стимуляции. Например, значения параметров стимуляции могут быть определены пользователем через пользовательский интерфейс 56.
Микропроцессор 536 соединен с переключателем 530 электродов и предназначен для управления переключателем 530 электродов с целью выбора стимулирующих электродов в соответствии со схемой активации.
Микропроцессор 536, например, также включает в себя таймер для управления порядком работы микропроцессора 536, чтобы в процессе работы выполнялась последовательность этапов способа подачи электрического сигнала стимуляции мышц в ткань тела через систему 10 электродов, как описано ниже.
Кроме того, микропроцессор 536 соединен с, и/или снабжен памятью 533, например, для хранения параметров стимуляции или данных, связанных с ответными сигналами, как описано ниже.
В примере на Фиг. 1 система 10 электродов включает в себя отдельный датчик в форме двух чувствительных электродов 30. В данном примере чувствительные электроды 30 расположены на всем протяжении параллельно друг другу на противоположных сторонах системы 10 электродов, снаружи матрицы 13 электродов и противоэлектрода 11. Например, сенсорные электроды являются электродными накладками, формирующими полосы, например, прямоугольной формы. В примере на Фиг. 2 датчик является двухполюсным электромиографическим (ЭМГ) датчиком.
Датчик может регистрировать параметр мышечной ткани, который формирует величину активности указанной мышечной ткани. Датчик имеет выход датчика, который соединен с входом блока 537 обработки сигналов в блоке 53 управления. Через выход датчика датчик может подавать сигнал датчика в блок 537 обработки сигналов. Блок 537 обработки сигналов может определять на основе сигнала датчика значение величины активности, то есть измерять сигнал, регистрируемый датчиком, и выдавать значение через выход процессора в микропроцессор 536. Таким образом, блок 537 обработки сигналов может выдавать значение величины мышечной активности, выражаемой измеряемым сигналом, в микропроцессор 536.
Например, микропроцессор 536 может определять параметр мышечной ткани на основе значения, определенного блоком 537 обработки сигналов, и выводить указанное значение в воспринимаемой пользователем форме на пользовательском интерфейсе 56. Кроме того, например, указание того, находится ли матрица электродов все еще над местоположением, подходящим для стимуляции, может генерироваться на основе ответных сигналов, и может быть показано пользователю. Предпочтительно система 10 электродов является системой сухих электродов, то есть система, которая не приклеивается к коже как "приклеиваемые" электроды, но также и в случае "приклеиваемых" электродов.
В измененном варианте осуществления датчик находится в форме одиночного чувствительного электрода 30 для однополюсного ЭМГ измерения. Таким образом, датчик является однополюсным ЭМГ датчиком. Например, датчик может быть расположен около матрицы 13 электродов.
В другом измененном варианте осуществления по меньшей мере один выбираемый электрод из электродов 12 формирует датчик. Например, электроды 12 имеют двойную функцию электрической стимуляции мышечной ткани и регистрации указанного параметра мышечной ткани, который формирует величину активности указанной мышечной ткани. Например, вход блока 537 обработки сигналов соединен с электродами 12, или соединяется через переключатель 530 электродов с электродами 12. Например, по меньшей мере один электрод из электродов 12 может действовать как однополюсный или двухполюсный ЭМГ датчик. Таким образом, отдельные чувствительные электроды 30 не требуются. Например, блок 53 управления может быть приспособлен для управления переключателем 530 электродов, чтобы выбирать по меньшей мере один электрод 12 для формирования датчика, предназначенного для регистрации указанного параметра мышечной ткани через указанный по меньшей мере один выбранный электрод 12, и для приема ответного сигнала.
На Фиг. 3 показана блок-схема примера способа подачи электрического сигнала стимуляции мышц в ткань тела, которая контактирует с мышечной тканью, в особенности в кожу над мышцей.
На первом этапе 110 систему 10 электродов, включающую в себя матрицу 13 электродов, помещают на желаемую поверхность, например, участок кожи над мышечной тканью.
Во втором этапе 112 микропроцессор 536 управляет переключателем 530 электродов для выбора по меньшей мере одного стимулирующего электрода в соответствии с первой схемой активации из последовательности схем активации. Например, каждая схема активации может состоять из отдельного электрода из активируемых электродов 12. Например, последовательность схем активации является последовательностью электродов в определенном порядке. Например, электроды 12 могут активироваться ряд за рядом и, в пределах каждого ряда, колонка за колонкой в случае прямоугольной матрицы 13 электродов. Впрочем, микропроцессор 536 также может иметь возможность управлять переключателем 530 электродов для выбора стимулирующих электродов в соответствии со схемой активации, состоящей более чем из одного электрода.
На третьем этапе 114 сигнал стимуляции мышц, генерируемый генератором 531 сигналов, подается через стимулирующий электрод, выбранный переключателем 530 электродов, в кожу и, таким образом, в мышечную ткань, находящуюся в электрическом контакте с кожей. Таким образом, мышечная ткань может подвергаться электрической стимуляции. Эффективность стимуляции обычно зависит от положения стимулирующего электрода или, в более общем смысле, от схемы активации.
На четвертом этапе 116 сигнал датчика измеряется блоком 537 обработки сигналов. Например, этап измерения совпадает с этапом стимуляции. В частности, сигнал измеряется в течение отрезка времени, позволяющего определять величину активности мышцы. В частности, например, сигнал измеряется в течение такого отрезка времени после приложения сигнала стимуляции через стимулирующий электрод стимуляции. Таким образом, измеренный сигнал включает ответный сигнал, связанный со стимулирующим электродом, или, в более общем смысле, со схемой активации для стимуляции. Например, сигнал датчика непрерывно получают посредством блока 537 обработки сигналов, при этом ответный сигнал, связанный с определенным стимулирующим электродом, идентифицируют на основе информации по времени приложения соответствующих сигналов стимуляции. Например, такая информация и, необязательно, информация по схеме активации, используемой для стимуляции, может поступать в блок 537 обработки сигналов через микропроцессор 536.
Вместо использования датчика, имеющего чувствительные электроды 30 на Фиг. 1, этап приема ответного сигнала, связанного со схемой активации, от датчика может включать управление переключателем 530 электродов, чтобы выбирать по меньшей мере один электрод 12 с целью формирования датчика для регистрации указанного параметра мышечной ткани через указанный по меньшей мере один выбранный электрод 12, и прием ответного сигнала от указанного по меньшей мере одного выбранного электрода 12.
На пятом этапе 118 блок 537 обработки сигналов определяет значение величины активности мышцы, выражаемое измеренным ответным сигналом, как описано ниже.
Затем повторяют этапы 112, 114, 116 и 118 поиска со следующей схемой активации последовательности схем активации, выбираемой в этапе 112, при этом соответствующий по меньшей мере один электрод стимулируется на этапе 114. Этапы повторяют для каждой последующей схемы активации в последовательности схем активации. В примере схем активации, состоящих из различных отдельных электродов, это означает, что последовательность этапов 112-118 выполняют один раз для каждого из указанных девяти электродов 12. Электроды 12 активируются один за другим, при этом производится анализ соответствующих ответных сигналов. Впрочем, ответный сигнал, измеряемый на этапе 116, также может быть зарегистрирован, и этапы 112-116 могут быть повторены для последовательности схем активации перед выполнением этапа 118 анализа для каждого ответного сигнала.
На Фиг. 4 показан пример сигнала электромиограммы (ЭМГ), полученный блоком 537 обработки сигналов от датчика. На кривой, показанной на Фиг. 4, видны резкие пики, соответствующие приложению сигналов стимуляции к отдельным электродам, которые пронумерованы на Фиг. 4 от 1 до 9. В интервалах между стимуляцией регистрируется ответный сигнал, связанный с соответствующим стимулирующим электродом. Например, как показано на Фиг. 4, стимулирующие электроды последовательно активируются при частоте F.
Например, блок 537 обработки сигналов определяет двойную амплитуду для каждого из ответных сигналов, связанных с различными стимулирующими электродами или схемами активации. На Фиг. 4 максимальная двойная амплитуда ответного сигнала, связанного с электродом номер 5, обозначена двойной стрелкой.
После измерения и анализа ответного сигнала для стимуляции каждого электрода, по меньшей мере один из электродов 12 выбирается на основе величины мышечной активности, выражаемой измеренными ответными сигналами на шестом этапе 120. В частности, например, может быть выбран стимулирующий электрод, который, как обнаружили, вызывал наибольшую величину мышечной активности. В примере на Фиг. 4, таким образом, выбирают электрод номер 5. В частности, например, по меньшей мере один электрод может быть выбран для стимуляции мышечной ткани. Микропроцессор 536 выбирает указанный по меньшей мере один электрод. Кроме того, например, микропроцессор 536 может управлять переключателем 530 электродов для выбора указанного по меньшей мере одного электрода.
На седьмом этапе 122 сигнал стимуляции мышц генератора 531 сигналов подается через указанный, выбранный по меньшей мере один электрод из электродов 12 через кожу в мышечную ткань с целью стимуляции мышечной ткани. Электрод, демонстрирующий наибольшую величину ответа, как полагают, является электродом, наиболее подходящим для стимуляции мышечной ткани. Впрочем, например, для стимуляции может быть выбрано больше одного электрода. Например, для стимуляции могут быть выбраны все электроды, у которых связанный с ними ответный сигнал показывает величину мышечной активности выше определенного порога. В примере на Фиг. 4 это может привести к выбору для стимуляции на этапе 120 электродов номер 5 и 6, поскольку им соответствуют ответные сигналы с наибольшей двойной амплитудой.
На этапе 120 вместо выбора, по меньшей мере, одного электрода на основе критерия максимальной двойной амплитуды соответствующего ответного сигнала, могут использоваться другие критерии для выбора по меньшей мере одного электрода. Примерами подходящих критериев являются: наибольшая площадь под кривой ответного сигнала, наибольшая скорость увеличения ответного сигнала, наибольшая скорость уменьшения ответного сигнала и т.д.
Способ, показанный на Фиг. 3, описанный на данный момент, может применяться при определении электродов для стимуляции мышечной ткани в статическом состоянии мышцы. Не желая быть связанными с какой-либо теорией, предполагается, что положение электродов, которые демонстрируют наибольшую величину мышечной активности в ответ на стимуляцию, является наиболее подходящим для стимуляции активности мышечной ткани. Таким образом, по меньшей мере один стимулирующий электрод, выбранный на этапе 120, соответствует местоположению, подходящему, или наиболее подходящему для стимуляции указанной мышечной ткани. Такое положение, как ожидают, будет соответствовать двигательной точке соответствующей мышцы, то есть области, в которой двигательный нерв входит в мышцу.
Например, в способе на Фиг. 3, после стимуляции мышечной ткани на этапе 122, этапы способа повторяют, начиная снова с выбора первого стимулирующего электрода или схемы активации на этапе 112. Таким образом, процесс поиска на этапах 112-118 и процесс стимуляции на этапах 120 и 122 повторяются. Таким образом, местоположение, подходящее для стимуляции мышечной ткани, может отслеживаться в динамическом состоянии, например, в состоянии, когда мышца сокращается или расслабляется, или двигается из-за активности другой мышцы.
Например, этапы 112-116 поиска могут быть выполнены для последовательности схем активации в зависимости от предварительно выбранного по меньшей мере одного стимулирующего электрода. Например, поиск может производиться на электродах, расположенных рядом с ранее выбранным стимулирующим электродом.
Таким образом, когда местоположение двигательной точки относительно поверхности кожи изменяется в результате индуцированного сокращения мышцы или при сокращении или расслаблении групп мышц в том же участке тела, описанный способ облегчает отслеживание двигательной точки для сохранения эффективной стимуляции.
Кроме того, например, местоположение двигательной точки или по меньшей мере одного стимулирующего электрода, выбранного на этапе 120, может быть отображено на дисплее пользовательского интерфейса 56. Это может позволять постоянно контролировать положение двигательной точки, как в статическом, так и в динамическом состоянии.
В описанном варианте осуществления на Фиг. 3 этап 120 выбора по меньшей мере одного электрода для стимуляции и/или этап 122 стимуляции могут быть необязательными этапами. Например, после определения по меньшей мере одного электрода, подходящего для стимуляции мышечной ткани на этапе 120, способ может продолжаться процессом поиска на этапах 112, 114, 116 и 118. Это может позволять контролировать положение местоположения, подходящего для стимуляции. В данном случае интенсивность стимуляции должна быть настолько низкой, насколько это возможно, но при этом выше порога стимуляции; предпочтительно достаточно низкой, чтобы не чувствовать процесс поиска, и немного выше порога стимуляции.
В другой модификации варианта осуществления Фиг. 3 описанные этапы способа могут быть выполнены одновременно для мышечной ткани различных мышц, например, различных мышц группы мышц. Таким образом, например, этапы 120 и 122 могут быть одновременно или впоследствии выполнены для стимуляции мышечной ткани различных мышц. Например, на этапе 120, по меньшей мере один первый электрод может быть выбран для стимуляции первой мышцы, и по меньшей мере один второй электрод может быть отобран для стимуляции второй мышцы. Например, на этапе 122, через первый, выбранный по меньшей мере один электрод выборочно подается электрический сигнал стимуляции мышц в мышечную ткань указанной первого мышцы, и через указанный второй, выбранный по меньшей мере один электрод выборочно подается электрический сигнал стимуляции мышц в мышечную ткань второй мышцы. Например, электроды или схемы активации, связанные с большой величиной мышечной активности, предназначены по меньшей мере для одной из первой или второй, или других мышц, на основании предопределенного знания относительной ориентации местоположений, подходящих для стимуляции или двигательных точек различных мышц. Такая предопределенная информация может быть сохранена, например, в памяти 533. Дополнительно или альтернативно, такая информация может быть получена посредством анализа реакции мышцы на различные стимулирующие электроды или схемы активации и введения данных, касающихся мышц, через пользовательский интерфейс 56. Например, на этапе 118 анализа, пользователю может быть дан запрос по введению информации, по которой мышца была активирована на предыдущем этапе 114 стимуляции. Возможность выборочной стимуляции более одной мышцы обеспечивает преимущество, в особенности при стимуляции в такой области, в которой несколько двигательных точек расположены очень близко друг к другу.
Кроме того, одновременное выполнение этапов способа Фиг. 3 для мышечной ткани различных мышц может позволять соотносить изменения местоположения некоторых двигательных точек с движениями других двигательных точек или мышц. Это обеспечивает преимущество, например, в ситуации, когда положение двигательной точки первой мышцы влияет на положение двигательных точек других мышц, например, мышц-антагонистов, согласно определенной зависимости.
Кроме того, одновременное выполнение этапов способа Фиг. 3 для мышечной ткани различных мышц предпочтительно в таких применениях, как восстановление хватательной функции рук, когда требуется стимулировать различные мышцы в определенной последовательности, чтобы достичь требуемого движения руки. Блок 53 управления может управлять указанным этапом 122 выборочной подачи через соответствующий выбранный по меньшей мере один электрод электрического сигнала стимуляции мышц в мышечную ткань соответствующей мышцы согласно требуемой последовательности активации для различных мышц. Например, продолжительность и время, в которое происходит стимуляция определенной мышцы, могут быть определены согласно требуемой последовательности стимуляции.
Кроме того, стимуляция мышечной ткани различных мышц может быть выполнена в зависимости от состояния мышцы-антагониста, противодействующей данной мышце. Например, стимуляция мышцы-агониста и соответствующей мышцы-антагониста может быть выполнена взаимоисключающим способом. Это повышает безопасность стимуляции мышц. Кроме того, например, стимуляция мышцы-агониста проводится при условии отсутствия мышечной активности мышцы-антагониста. Это позволяет дополнительно повысить безопасность стимуляции мышц.
В другом измененном варианте осуществления способа Фиг. 3, стимуляция на этапе 122 может быть выполнена при условии, что в соответствующих ответных сигналах была обнаружена активность мышцы-антагониста. Это может быть выгодно при устранении тремора или спазматического движения. Таким образом, измеряется активность мышцы-антагониста, например, вследствие тремора или спазма, и мышца-агонист стимулируется на этапе 122 таким образом, чтобы "устранить" тремор или спазм. Например, этапы способа Фиг. 3 могут быть выполнены одновременно для мышечной ткани мышцы-агониста и мышечной ткани мышцы-антагониста.
На Фиг. 5 показана блок-схема другого примера способа подачи электрического сигнала стимуляции мышц в ткань тела, которая контактирует с мышечной тканью. Способ аналогичен способу на Фиг. 3, но отличается от указанного способа тем, что этап 122 стимуляции является восьмым этапом, а между этапами 120 и 122 выполняется седьмой этап 130 определения ориентации части тела на основе измеренных ответных сигналов.
На этапе 130, например, состояние мышечной ткани определяют на основе измеренных ответных сигналов этапа 116 и этапа 118 анализа.
Например, если местоположение, подходящее для стимуляции, было определено, как описано выше, данное положение может быть признаком состояния мышцы. Например, указанное состояние мышечной ткани может быть состоянием ориентации мышечной ткани или части тела, включающей указанную мышечную ткань или ориентации другой части тела, которая зависит от состояния сокращения или расслабления указанной мышечной ткани.
Кроме того, например, на этапе 130, ориентацию части тела определяют, то есть оценивают, на основе определяемого состояния указанной мышечной ткани.
Например, ориентацию части тела определяют на основе определяемого состояния указанной мышечной ткани и на основе калибровочных данных. Калибровочные данные могут быть получены на начальном этапе калибровки, когда пользователь выполняет определенное движение и/или принимает определенное положение, и/или активирует или расслабляет определенную мышцу. Калибровочные данные могут быть сохранены в памяти 533.
Необязательно, способ продолжается на этапе 122 стимуляции, перед необязательным повторением этапов способа, начиная с этапа 112 процесса поиска, как описано выше. Таким образом, определение ориентации части тела может быть объединено со стимуляцией мышечной ткани. Например, стимуляция может быть выполнена в зависимости от определяемой ориентации. Это позволяет, например, стимулировать мышечную ткань в соответствии с движением части тела, например, регулируя стимуляцию при необходимости, чтобы достигнуть требуемого движения.
В измененном варианте осуществления способа Фиг. 5, этапы способа могут выполняться одновременно для мышечной ткани различных мышц, аналогично описанному выше для способа Фиг. 3.
Например, ориентация части тела может быть также определена на основе определенного состояния мышечной ткани более чем одной мышцы. Например, местоположения, подходящие для стимуляции, могут быть определены, как описано выше, для мышечных тканей более чем одной мышцы. Например, могут быть определены двигательные точки бицепса и трицепса, и, на этапе 130, ориентация руки может быть определена на основе определяемого состояния указанных мышц.
В другом примере стимуляция мышечной ткани отдельных мышц на этапе 122 может быть выполнена в соответствии с последовательностью мышечного сокращения различных мышц с целью достижения требуемого движения. Например, в применении для восстановления хватательной функции руки, последовательность стимуляции мышц необходима для достижения требуемого движения. Например, положение руки и/или кисти, и/или пальцев может быть определено путем определения положения двигательных точек отдельных мышц, при этом последовательность активации различных мышц может быть получена с учетом положений или ориентаций, определенных на этапе 130. Это обеспечивает преимущество, состоящее в том, что для определения ориентации соответствующей части тела не требуется никакое дополнительное устройство, такое как, например, акселерометр или гироскоп.
Хотя изобретение было проиллюстрировано и подробно описано на фигурах и в предыдущем описании, такую иллюстрацию и описание следует считать иллюстративными или примерными, и не ограничивающими. Изобретение не ограничивается раскрытыми вариантами осуществления.
В частности каждая описанная особенность устройства согласно изобретению предпочтительно может применяться в сочетании со способом согласно изобретению, и наоборот.
Изменения в раскрытых вариантах осуществления могут быть поняты и произведены квалифицированными специалистами в данной области при осуществлении заявленного изобретения, на основе изучения фигур, описания и прилагаемой формулы.
Например, различные элементы операционного блока 50, описанного как содержащегося в корпусе, также могут быть отдельными друг от друга, например, формировать отдельные устройства. Кроме того, части операционного блока могли быть включены в систему 10 электродов, или операционный блок может быть объединен с системой 10 электродов.
В формуле изобретения слово "включающий" не исключает другие элементы или этапы, а единственное число в оригинальном тексте настоящей заявки не исключает множественное число. Любые номера позиций в формуле не следует рассматривать как ограничение объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТИМУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ВЫЗЫВАНИЯ ПРИЯТНОГО ОЩУЩЕНИЯ У ПОЛЬЗОВАТЕЛЯ | 2011 |
|
RU2629163C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ НЕДЕРЖАНИЯ МОЧИ И СПОСОБ ЛЕЧЕНИЯ НЕДЕРЖАНИЯ МОЧИ, СТИМУЛИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ СТИМУЛЯЦИИ | 2011 |
|
RU2597803C2 |
| СПОСОБ ЭЛЕКТРОСТИМУЛЯЦИИ И ПРИБОР ДЛЯ ЭЛЕКТРОСТИМУЛЯЦИИ | 2018 |
|
RU2771207C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
| ЛЕЧЕНИЕ | 2009 |
|
RU2530754C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЛАДКОЙ МЫШЦЕЙ | 1997 |
|
RU2260451C2 |
| БИОПОЛЯРНОЕ СТИМУЛИРУЮЩЕЕ/РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО С ШИРОКО РАЗНЕСЕННЫМИ ЭЛЕКТРОДАМИ | 2007 |
|
RU2441677C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ УСТРОЙСТВА ДЛЯ ЛЕЧЕНИЯ ДИСФУНКЦИИ ВЕРХНИХ ДЫХАТЕЛЬНЫХ ПУТЕЙ ЛОШАДИ | 2007 |
|
RU2536280C9 |
| АДАПТИВНАЯ СИСТЕМА ТЕРАПИИ (ВАРИАНТЫ) И СИСТЕМА ТЕРАПИИ АКСОНОВ | 2007 |
|
RU2480254C2 |
| УПРАВЛЕНИЕ ЭЯКУЛЯЦИЕЙ | 2018 |
|
RU2777344C2 |
Группа изобретений относится к медицине. Способ отслеживания местоположения стимуляции, подходящего для стимуляции целевой мышечной ткани при динамическом сокращении или расслаблении мышцы, осуществляют с помощью устройства для электрической стимуляции. При этом размещают матрицу электродов в электрическом контакте с тканью тела, которая контактирует с мышечной тканью. Когда мышца находится в первом состоянии сокращения или расслабления, активируют электроды в соответствии с первой схемой активации, которая определяет подгруппу электродов. Измеряют ответный сигнал, связанный с первой схемой активации, путем регистрации параметра мышечной ткани. Параметр формирует величину активности мышечной ткани. Определяют местоположение стимуляции, подходящее для стимуляции мышечной ткани, когда мышца находится в первом состоянии, на основе измеренного ответного сигнала. Повторяют способ для мышцы во втором, другом состоянии из сокращения или расслабления с использованием второй схемы активации. Устройство содержит матрицу электродов, включающую в себя множество электродов и выполненную с возможностью соединения с генератором сигналов, переключатель электродов, датчик для измерения сигнала путем регистрации параметра мышечной ткани и блок управления для управления переключателем электродов и приема сигнала от датчика. Достигается определение подходящего для стимуляции местоположения или схемы активации без изменения положения матрицы электродов. 4 н. и 11 з.п. ф-лы, 5 ил.
1. Способ отслеживания местоположения стимуляции, подходящего для стимуляции целевой мышечной ткани при динамическом сокращении или расслаблении мышцы, включающий в себя этапы, на которых:
- размещают матрицу (13) электродов, включающую в себя множество электродов (12), в электрическом контакте с тканью тела, которая контактирует с мышечной тканью;
- когда мышца находится в первом состоянии сокращения или расслабления, активируют указанные электроды (12) в соответствии с первой схемой активации, которая определяет подгруппу электродов (12), при этом подгруппа состоит по меньшей мере из одного электрода (12) таким образом, что по меньшей мере один электрод (12) из подгруппы обеспечивает подачу электрического сигнала стимуляции мышц в указанную ткань тела, и
- измеряют ответный сигнал, связанный с первой схемой активации, путем регистрации параметра указанной мышечной ткани, при этом параметр формирует величину активности указанной мышечной ткани в ответ на электрический сигнал стимуляции, подаваемый указанным по меньшей мере одним электродом,
определяют по меньшей мере одно местоположение стимуляции, подходящее для стимуляции мышечной ткани, когда мышца находится в первом состоянии, на основе измеренного ответного сигнала,
повторяют способ для мышцы во втором, другом состоянии из сокращения или расслабления, используя вторую схему активации.
2. Способ по п. 1, в котором по меньшей мере одно местоположение стимуляции выбирают на основе величины критерия, подходящего для определения мышечной активности на основе ответного сигнала.
3. Способ по п. 1, дополнительно включающий в себя этап, на котором:
- выбирают по меньшей мере один из множества электродов (12) так, чтобы выбранный по меньшей мере один электрод соответствовал по меньшей мере одному местоположению стимуляции.
4. Способ по п. 1, причем способ дополнительно содержит этап определения по меньшей мере одного дополнительного местоположения стимуляции, подходящего для стимуляции мышечной ткани дополнительной мышцы субъекта на основе измеренного ответного сигнала и информации о том, к какой мышце подавался электрический сигнал стимуляции мышц.
5. Способ по любому из пп. 1-4, дополнительно включающий в себя этап, на котором определяют ориентацию части тела на основе измеренных ответных сигналов.
6. Способ по п. 5, в котором по меньшей мере одно подходящее местоположение стимуляции указывает ориентацию части тела, включающей в себя мышечную ткань, или ориентацию другой части тела, которая зависит от состояния сокращения или расслаблении мышечной ткани, причем ориентацию части тела определяют на основании определенного по меньшей мере одного подходящего местоположения стимуляции.
7. Способ по п. 5, причем способ дополнительно включает в себя начальный этап калибровки для получения калибровочных данных, когда пользователь выполняет определенное движение и/или принимает определенное положение, и/или активирует или расслабляет определенную мышцу, и калибровочные данные используют на этапе определения ориентации части тела.
8. Способ по п. 6, причем способ дополнительно включает в себя начальный этап калибровки для получения калибровочных данных, когда пользователь выполняет определенное движение и/или принимает определенное положение, и/или активирует или расслабляет определенную мышцу, и калибровочные данные используют на этапе определения ориентации части тела.
9. Устройство для электрической стимуляции целевой мышечной ткани при динамическом сокращении или расслаблении мышцы субъекта, включающее в себя:
- матрицу (13) электродов, включающую в себя множество электродов (12), для размещения в электрическом контакте с тканью тела, которая контактирует с указанной мышечной тканью; причем матрица (13) электродов выполнена с возможностью соединения с генератором (531) сигналов для генерации электрического сигнала стимуляции мышц;
- переключатель (530) электродов для выбора из множества электродов (12) одного или более электродов (12) для подачи электрического сигнала стимуляции от соединенного генератора (531) сигналов в указанную ткань тела;
- датчик (30; 12) для измерения сигнала путем регистрации параметра указанной мышечной ткани, причем параметр формирует величину активности указанной мышечной ткани; и
- блок (53) управления для управления переключателем (530) электродов и приема сигнала от датчика (30; 12), причем блок (53) управления выполнен с возможностью:
- когда мышца находится в первом состоянии сокращения или расслабления, активации указанных электродов (12) в соответствии с первой схемой активации, которая определяет подгруппу активируемых электродов (12), при этом подгруппа состоит по меньшей мере из одного электрода (12), посредством управления переключателем (530) электродов для выбора по меньшей мере одного электрода (12) из соответствующей подгруппы для подачи электрического сигнала стимуляции мышц от генератора (531) сигналов в указанную ткань тела, и
- приема ответного сигнала, соответствующего первой схеме активации, от датчика (30; 12),
- определения по меньшей мере одного первого местоположения стимуляции, подходящего для стимуляции мышечной ткани, когда мышца находится в первом состоянии, на основе измеренного ответного сигнала,
- когда мышца находится во втором, другом состоянии сокращения или расслабления, активируют указанные электроды (12) в соответствии со второй схемой активации, которая определяет подгруппу активируемых электродов (12), при этом подгруппа состоит по меньшей мере из одного электрода (12), посредством управления переключателем (530) электродов для выбора по меньшей мере одного электрода (12) из соответствующей подгруппы для подачи электрического сигнала стимуляции мышц от генератора (531) сигналов в указанную ткань тела,
- приема ответного сигнала, соответствующего второй схеме активации, от датчика (30; 12),
- определения по меньшей мере одного второго местоположения стимуляции, подходящего для стимуляции мышечной ткани, когда мышца находится во втором состоянии, на основе измеренного ответного сигнала.
10. Устройство по п. 9, в котором блок (53) управления дополнительно выполнен с возможностью выбора по меньшей мере одного из множества электродов (12), таким образом, что выбранный по меньшей мере один электрод соответствует по меньшей мере одному первому пригодному местоположению стимуляции и/или по меньшей мере одному второму пригодному местоположению стимуляции.
11. Устройство по п. 9, дополнительно включающее в себя блок (537) обработки сигналов для анализа ответного сигнала, полученного от датчика, причем блок (537) обработки сигналов выполнен с возможностью определения критерия, подходящего для определения активности мышцы на основе ответного сигнала.
12. Устройство по п. 9, дополнительно включающее в себя память (533) для хранения калибровочных данных.
13. Устройство по любому из пп. 9-12, в котором блок (53) управления выполнен с возможностью выполнения способа по любому из пп. 1-8.
14. Носитель данных, включающий компьютерную программу для выполнения этапов способа по любому из пп. 1-8.
15. Компьютер для исполнения компьютерной программы для выполнения этапов способа по любому из пп. 1-8.
| US 2008288020 A1, 20.11.2008 | |||
| ЭЛЕКТРОНЕЙРОАДАПТИВНЫЙ СТИМУЛЯТОР (ВАРИАНТЫ), ЭЛЕКТРОДНОЕ УСТРОЙСТВО И ЭЛЕКТРОДНЫЙ МОДУЛЬ | 2007 |
|
RU2336103C1 |
| ЭЛЕКТРОНЕЙРОАДАПТИВНЫЙ СТИМУЛЯТОР (ВАРИАНТЫ), ЭЛЕКТРОДНОЕ УСТРОЙСТВО И ЭЛЕКТРОДНЫЙ МОДУЛЬ | 2007 |
|
RU2336104C1 |
| WO 2007017778 A2, 15.02.2007 | |||
| WO 2008075250 A1, 26.06.2008 | |||
| US 2009118790 A1, 07.05.2009 | |||
| US 2001000187 A1, 05.04.2001. | |||

