Способ и устройство автоматизированной коррекции позы и движений верхней конечности в локтевом суставе относятся к области лечебно-восстановительной медицины и предназначен для пациентов с синдромом спастического гемипареза, встречающегося при таких неврологических заболеваниях, как острое нарушение мозгового кровообращения (ОНМК), черепно-мозговая травма (ЧМТ), рассеянный склероз.
Известен электростимулятор [патент США №US7162305 B2], содержащий ортез с датчиками, электродами и контроллером. Контроллер принимает сигналы датчиков (акселерометр и гироскоп), сравнивает их с пороговым значением и генерирует электрический выходной сигнал на электродах если сигнал датчиков превышает пороговое значение. Стыковочная станция облегчает подключение электродов и датчиков к компьютеру. Стыковочная станция включает в себя первый процессор для фиксации показаний датчиков и второй процессор для генерирования выходных сигналов на электродах.
Данное устройство разработано для использования в двигательной реабилитации, направленной на восстановление функции кисти у пациентов с центральным парезом в результате инсульта, ЧМТ, рассеянного склероза и т.д. Тренировки с использованием данного устройства направлены на предотвращение формирования спастичности в мышцах сгибателях кисти и могут способствовать восстановлению функции руки, за счет функциональной электростимуляции мышц-разгибателей кисти.
Недостатком данного устройства и способа является отсутствие модуля биологической обратной связи (БОС), что ограничивает эффект от проведения реабилитационных мероприятий. Кроме того, данное устройство недостаточно надежно и точно измеряет угловое положение конечности в силу высокого уровня погрешностей, присущих микромеханическим гироскопам и акселерометрам.
Также известен ортез для электростимуляции [патент США №5766236 А], содержащий оболочку из термически-изолирующего эластомера для расположения вокруг части тела, растяжимую электропроводящую ткань, расположенную на внутренней поверхности оболочки, и, по меньшей мере, один электрический разъем для электрического соединения с источником питания, обеспечивающий импульсный ток высокого напряжения. Электрическая стимуляция части тела обеспечивается посредством контакта электропроводящей ткани с кожей, в то время как оболочка сохраняет тепло в той части тела человека, вокруг которой она расположена, а также обеспечивает механическое сжатие и/или поддержку.
С помощью данного ортеза может быть реализован способ физиотерапии в комплексной реабилитации пациентов с синдромом спастичности для временного снижения повышенного мышечного тонуса и профилактики контрактур. Сочетание чрескожной электронейростимуляци, теплового воздействия и механической фиксации конечности позволяет использовать данное средство для улучшения трофики мягких тканей и лечения болевого синдрома.
Недостатком данного устройства и способа является неспособность определять параметры отклика стимулируемой мышцы, отсутствие средств для определения углового положения конечности, кроме того, к недостаткам следует отсутствие в нем звуковой и световой индикации, что препятствует достижению достаточного терапевтического эффекта.
Близким аналогом предлагаемого устройства по совокупности функциональных и конструктивных признаков является электростимулятор [патент США 9095417 В2], содержащий первый ортезный элемент, который включает в себя первый электрод. Первый ортезный элемент выполнен с возможностью расположения вокруг первой части конечности пользователя таким образом, что первый электрод находится в контакте с первой частью конечности. Устройство содержит второй ортезный элемент, который включает в себя второй электрод. Второй ортезный элемент выполнен с возможностью расположения вокруг второй части конечности так, что второй электрод находится в контакте со второй частью конечности. Соединительный узел обеспечивает взаимосоединение ортезных элементов и имеет выборочно регулируемую длину.
Данное устройство применяется для функциональной нервно-мышечной электростимуляции парализованных конечностей в процессе реабилитации. Возможны различные варианты использования электростимулятора, например, для осуществления движения нижней конечности в голеностопном, коленном, тазобедренном суставах, верхней конечности в плечевом, локтевом, лучезапястном суставах за счет электростимуляции соответствующих мышц. Такое воздействие эффективно для восстановления движений, снижения спастичности в парализованных конечностях в результате инсульта, ЧМТ и т.д., а также позволяет предотвратить атрофию частично денервированной мышцы, повысить мышечную силу при периферическом парезе, например, в результате травмы спинного мозга. Применение датчика походки, предусмотренного в одном из вариантов использования данного устройства, позволяет моделировать ходьбу за счет стимуляции одних мышц нижней конечности, когда датчик фиксирует опору стопы на поверхность пола, и других мышц при отсутствии реакции опоры. Такие тренировки могут быть использованы для реабилитации нарушений функции ходьбы при синдроме центрального гемипареза.
Недостатком данного устройства и способа является невозможность управления параметрами электростимуляции с учетом отклика стимулируемой мышцы, отсутствие модулей звуковой и световой индикации, так же к недостаткам можно отнести недостаточную точность регистрации двигательных действий, т.к. возникающие при движении динамические ускорения вносят погрешность в результат измерения датчиком наклона углового положения конечности. В совокупности, отмеченные недостатки ограничивают терапевтический эффект от применения электростимулятора.
Известна система [ М. Wielage, Н. Blume, Intuitive and interactive movement sonification on a heterogeneous RISC/DSP platform, in: Proceedings of the 18th Annual International Conference on Auditory Display, 2012, pp. 75-82], обеспечивающая сонификацию (элемент звуковой БОС) сложных движений в реальном времени, для процесса обучения нарушенных хватательных движений пациентов, перенесших инсульт, страдающих частичной потерей слуха. Фиксация хватательных движений осуществляется при помощи инерциальной сенсорной подсистемы, состоящей из ведущего модуля и датчиков (до 10 штук), количество датчиков обусловлено сложностью движения. При помощи процессора происходит расчет параметров сонификации и синтез звуковых сигналов разной частоты, что создает психоакустический эффект.
М. Wielage, Н. Blume, Intuitive and interactive movement sonification on a heterogeneous RISC/DSP platform, in: Proceedings of the 18th Annual International Conference on Auditory Display, 2012, pp. 75-82], обеспечивающая сонификацию (элемент звуковой БОС) сложных движений в реальном времени, для процесса обучения нарушенных хватательных движений пациентов, перенесших инсульт, страдающих частичной потерей слуха. Фиксация хватательных движений осуществляется при помощи инерциальной сенсорной подсистемы, состоящей из ведущего модуля и датчиков (до 10 штук), количество датчиков обусловлено сложностью движения. При помощи процессора происходит расчет параметров сонификации и синтез звуковых сигналов разной частоты, что создает психоакустический эффект.
Представленная система предназначена для использования в реабилитации верхней конечности после инсульта. Инерциальные датчики определяют положение сегментов верхней конечности в трехмерном пространстве. Программное обеспечение преобразует кинематические и динамические параметры движения в искусственно создаваемые неречевые звуки, воспринимаемые пациентом через наушники. Во время осуществления движения верхней конечности, определенным образом меняются психоакустические параметры звука (например, громкость, высота тона, тембр, гармония и ритм). Звуковая БОС направлена на помощь в контроле, выполнении и планировании движений за счет дополнительной звуковой информации о процессе движения. Тренировки с использованием звуковой БОС улучшают показатели двигательной функции руки, связанные с плавностью достижения цели, а также снижают выраженность нейро-артропатического болевого синдрома в паретичной конечности.
К недостаткам данного устройства и способа можно отнести отсутствие элементов световой индикации для обеспечения БОС, что снижает возможный терапевтический эффект, потребность в специалисте высокой квалификации при проведении реабилитации, стоимость, малая мобильность. Кроме того, система не содержит электростимуляции и средств фиксации мышечного отклика, а возникающие при движении динамические ускорения вносят погрешность в результаты измерения датчиком наклона углового положения конечности.
Близким по технической сущности к предлагаемому изобретению решением, является электростимулятор [патент WO 2012/003451 А2], содержащий, по меньшей мере, один электродный узел, приспособленный для доставки стимулирующих импульсов к мышцам пользователя, систему датчиков, предназначенную для обнаружения механического отклика мышц на сигнал стимуляции, устройство электростимуляции, соединенное, по меньшей мере, с одним электродным узлом и системой датчиков, при этом устройство электростимуляции включает в себя систему управления для автоматического обеспечения обратной связи о характеристике обнаруженной реакции, по меньшей мере, одной мышцы, и систему регулировки, по меньшей мере, одного параметра сигнала стимуляции мышц в реальном времени. Электростимулятор содержит микропроцессор, запрограммированный на управление параметрами электростимуляции в зависимости от обнаруженной реакции мышцы.
Данный электростимулятор поддерживает разные режимы электростимуляции, такие как, сенсорная чрескожная электронейростимуляция, используемая в медицине для купирования болевого синдрома, временного снижения спастичности, улучшения трофики мягких тканей и заживления ран, а также функциональная нервно-мышечная электростимуляция, широко используемая в реабилитации для восстановления утраченной двигательной функции. Прибор считывает доступную сохранную мышечную активность, регистрируемую с помощью электромиографии, или положение конечности в пространстве, регистрируемое с помощью акселерометра и генерирует мышечное сокращение в режиме реального времени для осуществления физиологического движения. Данное изобретение можно адаптировать для стимуляции различных мышечных групп, например, мышц туловища для перехода из одного положения в другое, стимуляции нижних конечностей для модуляции ходьбы или верхних конечностей для осуществления захвата предмета. Функциональная нервно-мышечная электростимуляция с использованием данного устройства может применяться для восстановления мышечной силы в парализованных конечностях для тренировки скорости ходьбы и восстановления ее симметрии, тренировки равновесия и уменьшения риска падений при синдроме центрального гемипареза в результате инсульта, ЧМТ и т.д., а также для предотвращения атрофии мышц, например, в результате неполного поражения спинного мозга.
Недостатком устройства и способа является невысокая точность измерения углового положения конечности пациента. При коррекции движений человека при ходьбе, что необходимо, например, при реабилитации мышц после инсульта, динамические ускорения вносят погрешность в расчет углового положения конечности, что в результате может повлечь за собой нежелательные побочные эффекты. Не обеспечивается возможность оптимального выбора параметров сигнала воздействия с учетом индивидуальных особенностей пациента. В одном из вариантов данного устройства для регистрации мышечного отклика на сигнал стимуляции используется электромиографический датчик, что характерно для всех устройств данного класса. Однако данные ЭМГ датчиков искажаются из-за паразитного эффекта, вносимого ФЭС, который заключается в подавлении биоэлектрического потенциала мышц в течение первых 10-12 мс. Отсутствие модуля БОС снижает эффективность проводимых реабилитационных мероприятий.
Наиболее близким техническим решением, принятым за прототип, является устройство для электрической стимуляции мышц [патент РФ №2570960], обеспечивающее многоканальную стимуляцию через матрицу неинвазивных электродов, контактирующих с мышечной тканью, при помощи этих же электродов может быть определен отклик активности мышечной ткани через датчик регистрации мышечной активности (электромиографический датчик). Устройство, по одному из вариантов исполнения, содержит акселерометр, таким образом, может быть определено положение акселерометра относительно части тела, показания акселерометра могут быть связаны с движением указанной части тела на основании определенного положения акселерометра. По другому варианту, устройство предусматривает наличие дополнительных датчиков положения и движения, таких как гироскопы и акселерометры, избыточных для определения ориентации части тела. Устройство также обеспечивает подбор параметров стимуляции, в ответ на показания датчика регистрации мышечной активности, и активацию отдельных электродов при помощи блока управления.
В основном варианте осуществления данное изобретение используется для восстановления хватательной функции руки посредством функциональной нервно-мышечной электростимуляции. Пациент должен попытаться выполнить движение пораженной конечностью, устройство распознает данную попытку с помощью элетромиографического датчика или акселерометра и запускает электрический импульс, вызывающий скоординированное сокращение мышц пораженной конечности, приводящее к вытягиванию руки и захвату предмета. Считается, что повторение тренировок с одновременным намерением движения и сенсорной обратной связью, возникающей в результате движения с помощью электростимуляции, вызывает нейропластические изменения, которые в конечном итоге приводят к восстановлению произвольной двигательной функции. Данное устройство может применяться в реабилитации пациентов при неврологических заболеваниях с утратой функции верхней конечности, таких как инсульт, травма спинного мозга, ЧМТ, детский церебральный паралич, рассеянный склероз.
К недостаткам данного устройства и способа следует отнести, во-первых, отсутствие звуковой и световой индикации для обеспечения БОС, во-вторых, невозможность использования устройства без электростимуляции для пациентов со слабо выраженной синергией конечности, в-третьих, ненадежность определения положения конечности за счет использования в одном из вариантов реализации датчиков положения или движения (акселерометр и гироскоп), восприимчивых к динамическим ускорениям, которые вносят погрешность в расчет положения конечности, в-четвертых, в предлагаемом техническом решении в одном из вариантов предложено использование электромиографического датчика, недостатком использования которого совместно с электростимуляцией является наличие паразитного фактора, который заключается в подавлении биоэлектрических потенциалов мышц в течение первых 10-12 мс. Все вышеуказанные недостатки, в целом, снижают общий терапевтический эффект от применения устройства.
Задача предлагаемого способа и устройства автоматизированной коррекции позы и движений верхней конечности в локтевом суставе заключается в предотвращении непроизвольного приведения руки к корпусу тела при ходьбе, в результате воздействия на патологическую синергию, возникающую в верхней конечности при синдроме центрального гемипареза.
Технический результат от применения предлагаемого устройства и способа заключается в расширении объема пассивных и активных движений в локтевом суставе, улучшении функции самообслуживания пациента, улучшении его качества жизни, обеспечения свободы движения конечности и повышения точности определения ее углового положения с помощью датчика углового положения.
Технический результат достигается за счет введения в конструкцию устройства светодиодного браслета и блока световой индикации, обеспечивающих биологическую обратную связь (БОС), для предоставления пациенту информации о физиологических показателях деятельности собственной конечности, с целью восстановления утраченных функций конечности путем осуществления самостоятельных произвольных движений в локтевом суставе, за счет использования в конструкции датчика углового положения, образованного взаимно перпендикулярно ориентированными измерителями магнитного поля, а также увеличения числа степеней свободы шарнирного соединения для обеспечения большей подвижности конечности пациента при проведении лечебных процедур.
В предлагаемом устройстве существует возможность индивидуальной настройки параметров стимулирующего воздействия (длительности стимулирующих импульсов, частоты следования стимулирующих импульсов, амплитуды стимулирующих импульсов, количества стимулирующих импульсов в пачке). Электростимуляцию проводят сериями прямоугольных импульсов с паузами между ними. Длительность импульсов 1-5 мс, частота 50 или 100 Гц, 5-15 посылок в минуту. Амплитуда тока от 5 до 25 мА.
Для достижения технического результата устройство автоматизированной коррекции позы и движения верхней конечности в локтевом суставе, содержит плечевую и предплечевую охватывающие оболочки, состоящие из пластика или тканевой основы, выполненные с возможностью фиксации на конечности пациента удерживающими ремнями, выполненными из ткани и механически соединенные друг с другом посредством шарнирного соединения, снабженного встроенным датчиком углового положения, портативное средство электростимуляции, закрепленное на плечевой охватывающей оболочке и включающее в себя автономный источник питания и микропроцессорный блок управления, соединенные в электрическую цепь, блок звуковой индикации и усилитель мощности, выход которого присоединен первым токопроводящим кабелем к накладным электродам воздействия, согласно изобретению, дополнительно содержит светодиодный браслет, выполненный из ткани со вшитыми проводниками и светодиодами. Портативное средство электростимуляции дополнительно оснащено блоком световой индикации, выход которого присоединен вторым токопроводящим кабелем к светодиодному браслету; шарнирное соединение состоит из звена плоской формы, охватывающего и охватываемого звеньев, выполненных из металлического сплава или пластика, а также цилиндрического стержня, изготовленного из металлического сплава, например из стали, причем звено плоской формы одним концом закреплено на плечевой охватывающей оболочке с возможностью регулировки их взаимного положения, а другим соединено с первым концом охватывающего звена с образованием первой вращательной кинематической пары, второй конец охватывающего звена образует вторую вращательную кинематическую пару с первым концом охватываемого звена, второй конец охватываемого звена жестко соединен с первым концом цилиндрического стержня, закрепленного вторым концом в предплечевой охватывающей оболочке с возможностью их взаимного осевого и вращательного перемещения; датчик углового положения образован взаимно перпендикулярно ориентированными измерителями магнитного поля, выполненных из полупроводникового материала, жестко закрепленными на охватывающем звене, и постоянным магнитом, выполненным из сплава редкоземельных элементов, например неодимового, закрепленным на охватываемом звене; оси вращения первой и второй кинематических пар взаимно перпендикулярны.
По второму варианту исполнения, технический результат достигается за счет того, что устройство автоматизированной коррекции дополнительно содержит измеритель мышечного отклика, выполненный на основе микромеханического датчика акустического давления, не подверженного электрическим помехам, при совместном использовании с электростимуляцией.
По второму варианту исполнения портативное средство электростимуляции может определять параметры стимулирующего воздействия на основе величины активности мышцы, выражаемой измеренными ответными сигналами датчика регистрации мышечного отклика.
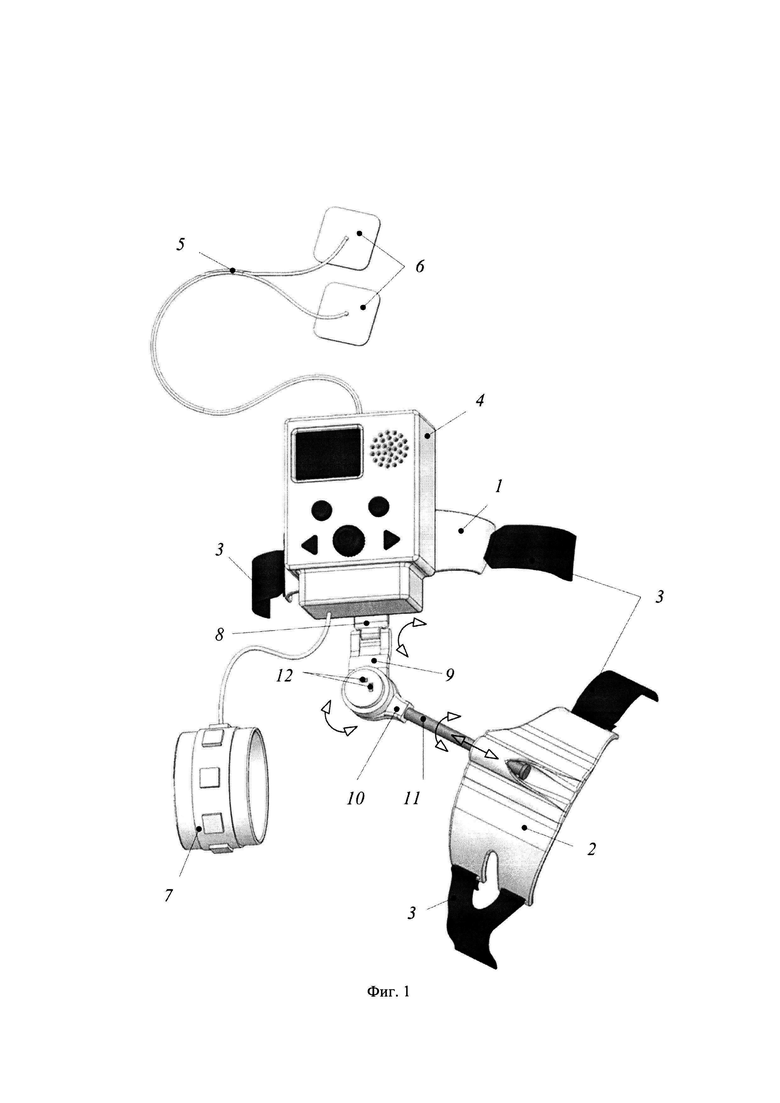
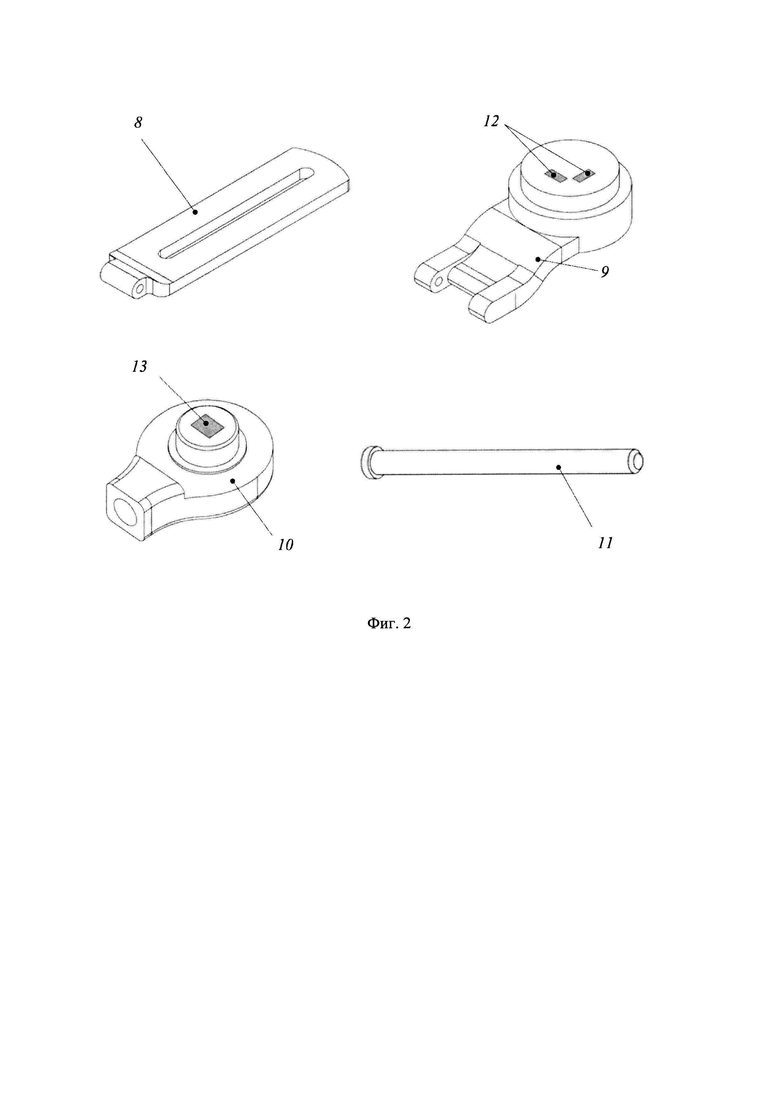
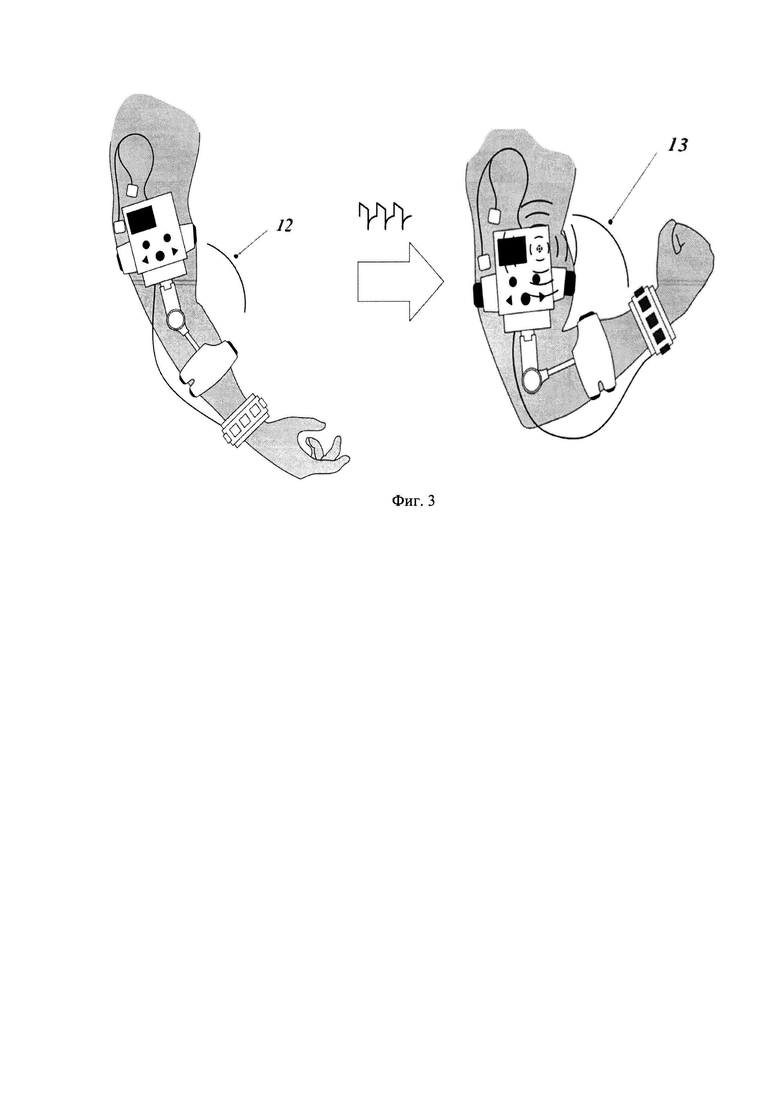
Составляющие устройства автоматизированного корректора позы и движения руки в локтевом суставе представлены на фиг. 1, на фиг. 2 - составляющие шарнирного соединения.
Устройство автоматизированной коррекции позы и движения руки в локтевом суставе (см. фиг. 1-2) содержит плечевую и предплечевую охватывающие оболочки 1 и 2 соответственно, выполненные с возможностью фиксации на конечности пациента удерживающими ремнями 3 и механически соединенные друг с другом посредством шарнирного соединения, снабженного встроенным датчиком углового положения, закрепленное на плечевой охватывающей оболочке портативное средство электростимуляции 4, присоединенное первым токопроводящим кабелем 5 к накладным электродам воздействия 6. Портативное средство электростимуляции 4 содержит блок звуковой индикации и блок световой индикации, выход которого присоединен вторым токопроводящим кабелем к светодиодному браслету 7. Шарнирное соединение состоит из звена плоской формы 8, охватывающего и охватываемого звеньев 9 и 10 соответственно, а также цилиндрического стержня 11; датчик углового положения образован взаимно перпендикулярно ориентированными измерителями магнитного поля 12, закрепленными в полостях охватывающего звена 9, и постоянным магнитом 13, закрепленным в полости охватываемого звена 10.
По второму варианту исполнения заявляемое устройство автоматизированной коррекции дополнительно содержит измеритель мышечного отклика, выполненный на основе микромеханического датчика акустического давления и подключенный к микропроцессорному блоку управления.
Способ автоматизированной коррекции позы и движения руки в локтевом суставе осуществляется следующим образом. Перед началом тренинга производят измерение артериального давления, частоты сердечных сокращений с целью оценки основных показателей жизнедеятельности до начала занятия. Непосредственно перед началом терапевтический процедуры на конечности пациента размещают устройство путем крепления удерживающими ремнями плечевой и предплечевой охватывающих оболочек на соответствующих сегментах конечности (Фиг. 3). Закрепляют накладные электроды воздействия у основания и окончания трехглавой мышцы плеча. Далее включают устройство и производят измерение угла датчиком углового положения между плечом и предплечьем, тот угол до которого пациент может произвольно разогнуть руку в локтевом суставе 12. Затем задают пороговое значение угла сгибания в локтевом суставе, до того угла, который пациент может произвольно разогнуть руку в локтевом суставе, меньше значения которого при приведении руки к корпусу запускается световая и звуковая индикация и становится возможным запуск электростимуляции 13. Электростимуляцию проводят сериями прямоугольных импульсов с паузами между ними, продолжительностью 3-6 секунд. Длительность импульсов 1-5 мс, частота 50 или 100 Гц, 5-15 посылок в минуту. Амплитуда тока от 5 до 25 мА.
Задачей пациента является ходьба по прямой с произвольным контролем положения паретичной руки, произвольным предотвращением ее сгибания в локтевом суставе и приведения к туловищу. При выполнении пациентом механических движений сгибания/разгибания в локтевом суставе датчиком углового положения фиксируется угол сгибания/разгибания в локтевом суставе, и соответствующая информация передается на портативное средство электростимуляции. При непроизвольном сгибании руки в локтевом суставе, превышающем заданный угол, включаются блоки световой и звуковой индикации, электрическими импульсами стимулируется трехглавая мышца плеча, которая участвует в разгибании руки в локтевом суставе. В зависимости от установленного значения порогового угла портативное средство электростимуляции формирует электрические импульсы с соответствующими исходно заданными параметрами (длительность импульсов 1-5 мс, частота 50 или 100 Гц, 5-15 посылок в минуту. Амплитуда тока от 5 до 25 мА). Режим работы устройства автоматизированной коррекции позы и движений верхней конечности в локтевом суставе предусматривает регулировку параметров стимулирующих импульсов, что позволяет выбрать режим комфортного для пациента воздействия на целевую мышцу. После окончания занятия пациенту повторно оценивают показатели артериального давления и частоты сердечных сокращений. Реабилитационные занятия выполняются ежедневно 1 раз в день в течение 10-30 минут, в зависимости от физического состояния пациента, его готовности продолжать занятие, курс лечения продолжается 15 дней.
Апробация и клинические примеры.
Клиническая апробация проводилась на кафедре нервных болезней с курсом ПО ФГБОУ ВО КрасГМУ им. проф. В.Ф. Войно-Ясенецкого.
В исследование были включены 7 пациентов, из них 5 пациентов, перенесших ОНМК по ишемическому типу в каротидном бассейне (3 человека - правая средняя мозговая артерия (ПСМА), 2 человека - левая средняя мозговая артерия (ЛСМА)) и 2 пациента с рассеянным склерозом. Поражение вещества головного мозга было визуализировано методами компьютерной томографии (КТ) или магнитно-резонансной томографии (МРТ). Критерии включения в исследование: синдром спастического гемипареза от легкой до умеренной степени с наличием патологического паттерна сгибания руки в локтевом суставе при ходьбе на этапе включения в исследование. Критерии исключения: синдром центрального гемипареза выраженной, грубой степени, плегия, спастический мышечный тонус 4-5 баллов по шкале Ашфорта, выраженные когнитивные расстройства, выраженная афазия, препятствующие проведению исследования, наличие эпилепсии, нарушений ритма сердца и других противопоказаний для электростимуляции. В ходе исследования всем пациентам до и после курса реабилитационных занятий проводились: оценка неврологического статуса с определением мышечной силы, определения объема активных и пассивных движений методом гониометрии, оценка мышечного тонуса с использованием модифицированной шкалы спастичности Ашфорта, тест для оценки двигательных навыков верхней конечности при центральном парезе Френчай.
Клинический пример №1. Применение способа и устройства автоматической коррекции позы и движений руки в локтевом суставе с синдромом центрального гемипареза.
Пациент, 1963 г. рождения, 58 лет.
Жалобы на слабость в левых конечностях, ограничение самообслуживания при выполнении бытовых заданий (одевание футболки, застегивание пуговиц, принятие пищи, прием ванны).
Анамнез заболевания: 18 августа 2020 г. на фоне подъема артериального давления до 200/110 мм рт.ст. появилась выраженная слабость в левых конечностях, опустился левый уголок рта. По данным магнитно-резонансной томографии визуализировался очаг ишемии в бассейне правой средней мозговой артерии. Выставлен диагноз: ОНМК по ишемическому типу (атеротромботический подтип) от 18.08.2020, в бассейне ПСМА с умеренным спастическим левосторонним гемипарезом, центральным парезом VII пары ЧМН слева.
В январе 2021 г. пациент проходил курс нейрореабилитации в условиях дневного стационара Профессорской клиники.
Неврологический статус на момент осмотра:
Зрение сохранено. Зрачки, глазные щели D=S. Объем движений глазных яблок полный. Нистагма, диплопии нет. Чувствительность на лице сохранена. Сглаженность левой носогубной складки. Глотание сохранено. Мышечная сила в руках: слева снижена проксимально до 4.0 б, дистально до 3.5 б, справа 5.0 б. Мышечная сила в ногах: слева 4.0 б, справа 5.0 б. Мышечный тонус повышен в сгибателях левой руки до 3-х баллов по шкале Ашфорта. Сухожильные рефлексы с рук S>D, с ног S>D. Патологические рефлексы с рук - Россолимо слева, с ног - Бабинского слева. Поверхностная болевая чув-ть: не нарушена. Суставно-мышечное чув-во: не нарушено. В позе Ромберга легкая шаткость за счет пареза. Пальценосовая проба (ПНП) слева с мимопопаданием за счет пареза, коленно-пяточная проба (КПП) слева с мимопопаданием ввиду пареза. Походка: гемипаретическая, левая рука приводится к корпусу при ходьбе (поза Вернике-Манна). Менингиальных знаков нет. Нарушение функций тазовых органов (НФТО) отрицает. Тест Френчай 3 б. Пациент не выполнил задания: взять стакан, наполовину наполненный водой и поставленный на расстоянии 15-30 см от края стола, отпить воды и поставить стакан на место, а также не смог причесать волосы.
Результаты динамической оценки пациента до и после курса реабилитации представлены в таблице 1.
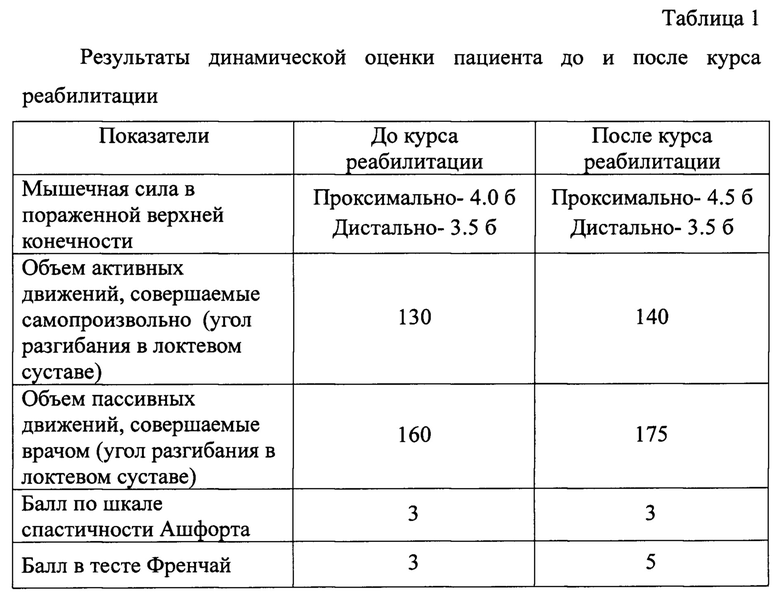
После проведения курса реабилитации с применением данного способа и устройства в течение 15 дней, ежедневно, как видно из представленной таблицы, увеличился объем активных и пассивных движений в локтевом суставе, наросла мышечная сила, а также улучшились бытовые навыки самообслуживания. При оценке двигательных навыков верхней конечности у пациента появилась возможность причесываться, принимать пишу. В данном случае использовалась частота импульсов 100 Гц, ввиду умеренной степени повышения мышечного тонуса по спастическому типу.
Клинический пример №2
Пациент, 1999 г. рождения, 30 лет.
Жалобы на неловкость движений в правых конечностях, приведение правой руки при ходьбе, повышение мышечного тонуса в правой руке при ходьбе, общую слабость, утомляемость.
Анамнез заболевания: дебют заболевания в июне 2017, когда в течение 2-х недель постепенно снижалось зрение на правый глаз с последующим самостоятельным регрессом в течение 1 мес. Второй эпизод ухудшения состояния отметил в сентябре 2020 г. когда подостро стала появляться и нарастать слабость в правых конечностях. По данным магнитно-резонансной томографии головного мозга с контрастом были выявлены множественные очаги демиелинизации в типичных для рассеянного склероза зонах. 1 очаг, копящий контраст перивентрикулярно слева в лобной доле.
Пациенту выставлен диагноз: Рассеянный склероз, ремиттирующее течение, с умеренным центральным правосторонним гемипарезом, сенсорными нарушениями, легкой мозжечковой атаксией, ст. обострения, расширенная шкала инвалидизации Expanded Disability Status Scale (EDSS) 3.0 балла.
Проведена гормональная ПУЛЬС - терапия с некоторой положительной динамикой, неполным регрессом симптомов, нарастание мышечной силы в правых конечностях до 4.0 баллов.
После купирования обострения пациенту проводились реабилитационные мероприятия с использованием данного способа и устройства коррекции позы и движения руки в локтевом суставе.
В неврологическом статусе на момент осмотра:
Зрение сохранено. Зрачки, глазные щели D=S. Объем движений глазных яблок полный. Нистагма, диплопии нет. Чувствительность на лице сохранена. Лицо симметрично. Глотание сохранено. Мышечная сила в руках: справа проксимально и дистально снижена до 4.0 б., слева 5 б. Мышечная сила в ногах: справа проксимально 4.0 б, слева 5.0 б. Мышечный тонус повышен в сгибателях правой руки до 1+-х баллов по шкале Ашфорта, в правой ноге до 2 баллов. Сухожильные рефлексы с рук D>S, с ног D>S с клонусом справа. Патологические рефлексы с рук - Россолимо справа, с ног - Бабинского справа. Поверхностная болевая чув-ть: не нарушена. Суставно-мышечное чув-во: снижено в пальцах стоп на 1 балл. В п. Ромберга легкая шаткость. ПНП с легкой интенцией слева, КПП справа с мимопопаданием ввиду пареза. Походка: гемипаретическая, правая рука приводится к корпусу при ходьбе. Менингиальных знаков нет. Нарушение функций тазовых органов (НФТО) отрицает. Тест Френчай 4 б. Пациент не выполнил задание на перенос стакана с водой.
Результаты динамической оценки пациента до и после реабилитации представлены в таблице 2.
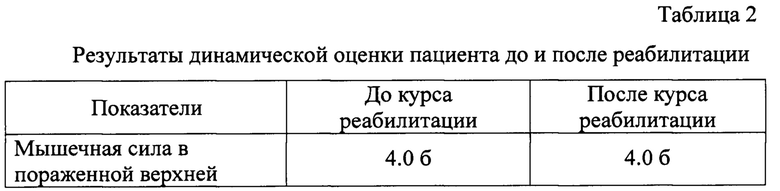

После проведения курса реабилитации у пациента отмечалось снижение мышечного тонуса, уменьшение проявлений патологической синергии в виде значительного уменьшения приведения правой руки к корпусу при ходьбе, увеличился объем активных и пассивных движений.
В данном клиническом примере частота импульсов составила 50 Гц, ввиду легкой степени повышения мышечного тонуса по спастическому типу.
Использование предлагаемого способа и устройства имеет следующие преимущества:
1) Позволяет эффективно воздействовать на патологические синергии в виду наличия модуля электростимуляции и модуля БОС в виде звуковой и зрительной индикации;
2) Возможность использовать в амбулаторных условиях;
3) Мобильность устройства;
4) Простота и удобство использования;
5) Возможность подбора параметров для каждого пациента индивидуально, повышает эффективность реабилитации в виде расширении объема пассивных и активных движений в локтевом суставе, улучшении функции самообслуживания пациента, улучшении его качества жизни.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реабилитации верхних конечностей пациентов, перенесших инсульт, с использованием биологической обратной связи и элементами виртуальной реальности | 2021 |
|
RU2789261C1 |
| СПОСОБ ПРОГРАММИРУЕМОЙ ЭЛЕКТРОСТИМУЛЯЦИИ МЫШЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2265461C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
| СПОСОБ ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ ДЕТЕЙ С КОМПРЕССИОННЫМИ ПОВРЕЖДЕНИЯМИ ПОЗВОНОЧНИКА | 2011 |
|
RU2464962C1 |
| СПОСОБ НЕЙРОДИНАМИЧЕСКОЙ (НЕЙРОСЕНСОРНОЙ) КОРРЕКЦИИ ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ, ПОЗНЫХ, СЕНСОРНЫХ И КОГНИТИВНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ПАТОЛОГИЕЙ НЕРВНОЙ СИСТЕМЫ И ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И КОСТЮМ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2013 |
|
RU2573535C2 |
| УСТРОЙСТВО ДЛЯ НЕЙРО-ОРТОПЕДИЧЕСКОЙ РЕАБИЛИТАЦИИ | 2004 |
|
RU2266082C1 |
| СПОСОБ ТРЕНИРОВКИ МЫШЦ | 2016 |
|
RU2620146C1 |
| КОСТЮМ ДЛЯ НЕЙРОМЫШЕЧНОЙ И СПИНАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ | 2017 |
|
RU2654285C1 |
| Способ формирования опорной функции верхних конечностей у пациентов с патологией позвоночника и спинного мозга на шейном уровне | 2019 |
|
RU2715549C1 |
Группа изобретений относится к медицине, а именно к способу и устройству автоматизированной коррекции позы и движений верхней конечности в локтевом суставе. Устройство содержит плечевую и предплечевую охватывающие оболочки, портативное средство электростимуляции и светодиодный браслет. Плечевая и предплечевая оболочки выполнены с возможностью фиксации на конечности пациента и механически соединены друг с другом посредством шарнирного соединения, снабженного встроенным датчиком углового положения. Средство электростимуляции закреплено на плечевой оболочке и включает в себя автономный источник питания и электрически соединенные с ним микропроцессорный блок управления, блок звуковой индикации и усилитель мощности, выход которого присоединен первым токопроводящим кабелем к накладным электродам воздействия. Портативное средство электростимуляции оснащено блоком световой индикации, выход которого присоединен вторым токопроводящим кабелем к светодиодному браслету. Шарнирное соединение состоит из звена плоской формы, охватывающего и охватываемого звеньев, а также цилиндрического стержня. Звено плоской формы одним концом закреплено на плечевой охватывающей оболочке с возможностью регулировки их взаимного положения, а другим соединено с первым концом охватывающего звена с образованием первой вращательной кинематической пары. Второй конец охватывающего звена образует вторую вращательную кинематическую пару с первым концом охватываемого звена. Второй конец охватываемого звена жестко соединен с первым концом цилиндрического стержня, закрепленного вторым концом в предплечевой охватывающей оболочке с возможностью их взаимного осевого и вращательного перемещения. Датчик углового положения образован взаимно перпендикулярно ориентированными измерителями магнитного поля, закрепленными на охватывающем звене, и постоянным магнитом, закрепленным на охватываемом звене. Оси вращения первой и второй кинематических пар взаимно перпендикулярны. Достигается расширение объема пассивных и активных движений в локтевом суставе. 2 н. и 2 з.п. ф-лы, 3 ил., 2 табл.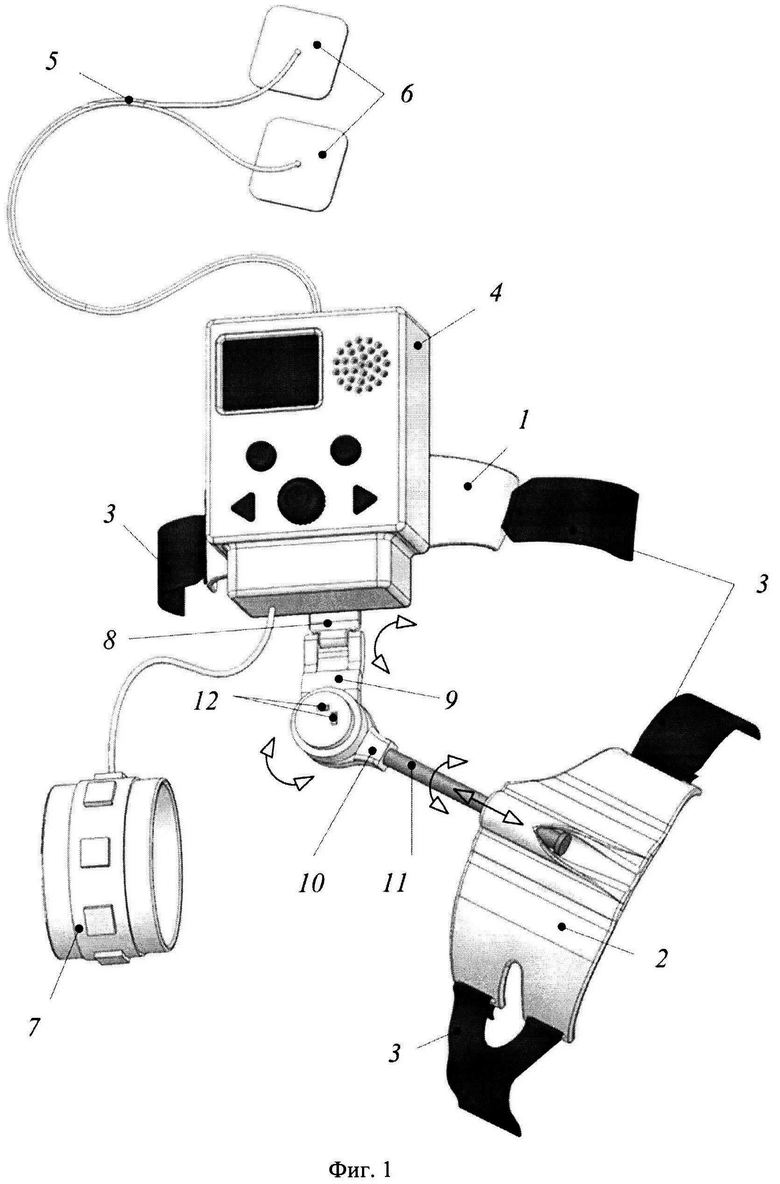
1. Устройство автоматизированной коррекции позы и движений верхней конечности в локтевом суставе, содержащее плечевую и предплечевую охватывающие оболочки, выполненные с возможностью фиксации на конечности пациента удерживающими ремнями и механически соединенные друг с другом посредством шарнирного соединения, снабженного встроенным датчиком углового положения, портативное средство электростимуляции, закрепленное на плечевой охватывающей оболочке и включающее в себя автономный источник питания и электрически соединенные с ним микропроцессорный блок управления, блок звуковой индикации и усилитель мощности, выход которого присоединен первым токопроводящим кабелем к накладным электродам воздействия, отличающийся тем, что он дополнительно содержит светодиодный браслет, а портативное средство электростимуляции дополнительно оснащено блоком световой индикации, выход которого присоединен вторым токопроводящим кабелем к светодиодному браслету; шарнирное соединение состоит из звена плоской формы, охватывающего и охватываемого звеньев, а также цилиндрического стержня, причем звено плоской формы одним концом закреплено на плечевой охватывающей оболочке с возможностью регулировки их взаимного положения, а другим соединено с первым концом охватывающего звена с образованием первой вращательной кинематической пары, второй конец охватывающего звена образует вторую вращательную кинематическую пару с первым концом охватываемого звена, второй конец охватываемого звена жестко соединен с первым концом цилиндрического стержня, закрепленного вторым концом в предплечевой охватывающей оболочке с возможностью их взаимного осевого и вращательного перемещения; датчик углового положения образован взаимно перпендикулярно ориентированными измерителями магнитного поля, закрепленными на охватывающем звене, и постоянным магнитом, закрепленным на охватываемом звене; оси вращения первой и второй кинематических пар взаимно перпендикулярны.
2. Устройство по п. 1, дополнительно содержит измеритель мышечного отклика, выполненный на основе микромеханического датчика акустического давления и подключенный к микропроцессорному блоку управления.
3. Способ автоматизированной коррекции позы и движений верхней конечности в локтевом суставе, характеризующийся тем, что для предотвращения непроизвольного приведения руки к корпусу тела при ходьбе, воздействуя на патологическую синергию используется устройство автоматизированной коррекции, которое размещают удерживающими ремнями плечевой и предплечевой охватывающих оболочек на соответствующих сегментах конечности; закрепляют накладные электроды воздействия у основания и окончания трехглавой мышцы плеча, включают устройство и производят измерение угла датчиком углового положения между плечом и предплечьем, затем задают пороговое значение угла сгибания в локтевом суставе; при этом во время ходьбы при непроизвольном сгибании руки в локтевом суставе, превышающем исходно заданный угол, включаются блоки световой и звуковой индикации, и трехглавая мышца плеча стимулируется электрическими импульсами с заданными параметрами.
4. Способ по п. 3, отличающийся тем, что занятия выполняются 1 раз в день, продолжительность 1 занятия от 10 до 30 минут, курс лечения продолжается 15 дней.
| US 9878152 B2, 30.01.2018 | |||
| 2002 |
|
RU2226114C1 | |
| US 9095417 B2, 04.08.2015 | |||
| US 20210138240 A1, 13.05.2021 | |||
| WO 2019226506 A1, 28.11.2019 | |||
| US 10099053 B2, 16.10.2018 | |||
| СПОСОБ ПРОГРАММИРУЕМОЙ ЭЛЕКТРОСТИМУЛЯЦИИ МЫШЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2265461C1 |
| Ортез для лечения пареза стопы | 2016 |
|
RU2681707C2 |

