ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к автоматическому инъектору для введения дозы жидкого лекарственного средства, в соответствии с преамбулой пункта 1 Формулы изобретения, и к способу работы автоматического инъектора.
УРОВЕНЬ ТЕХНИКИ
Введение инъекции является процессом, который представляет ряд рисков и трудностей для пользователей и работников здравоохранения, как интеллектуальных, так и физических.
Инъекторы (то есть устройства, предназначенные для введения лекарственных средств из контейнера с медикаментом) обычно подразделяются на две категории - ручные устройства и автоматические инъекторы.
В случае ручного устройства, пользователь должен приложить механическую энергию для того, чтобы пропустить текучую среду через иглу. Обычно это осуществляется посредством тех или иных видов кнопок/поршней, на которые пользователю нужно продолжительно надавливать во время инъекции. Данный подход имеет многочисленные недостатки для пользователя. Если пользователь прекращает надавливать на кнопку/поршень, то и инъекция также прекратится. Это означает, что пользователь может ввести недостаточную дозу, если устройство не используется должным образом (то есть поршень не надавлен полностью до предела). Усилия, требуемые для инъекции, могут быть слишком высоки для пользователя, в частности, если пациент преклонного возраста или имеются проблемы с физической ловкостью.
Углубление кнопки/поршня может быть слишком велико. Поэтому пользователю может быть неудобно достигать полного углубления кнопки. Сочетание усилия инъекции и углубления кнопки может привести к тому, что рука пациента будет дрожать/трястись, что, в свою очередь, повышает дискомфорт из-за движения введенной иглы.
Автоматические инъекционные устройства имеют своей целью сделать самостоятельный прием вводимых медицинских препаратов более простым для пациентов. Современные медицинские препараты, вводимые путем самостоятельных инъекций, включают в себя лекарственные средства от диабета (как инсулин, так и более новые лекарства класса ГПП-1), мигрени, препараты гормональной терапии, антикоагулянты и т.д.
Автоматические инъекторы являются устройствами, которые полностью или частично замещают действия, связанные с парентеральным введением лекарственных препаратов с помощью стандартных шприцев. Данные действия могут включать в себя удаление защитного колпачка шприца, введение иглы под кожу пациента, инъекцию лекарственного средства, удаление иглы, защита иглы и предотвращение повторного использования устройства. Это позволяет преодолевать многие из недостатков ручных устройств. Усилия инъекции/углубление кнопки, дрожание рук и вероятность введения недостаточной дозы снижаются. Приведение в действие может осуществляться многочисленными способами, например, посредством пусковой кнопки или с помощью действия иглы, достигающей своей инъекционной глубины. В некоторых устройствах энергия для введения текучей среды обеспечивается пружиной.
Документ US 2002/0095120 А1 раскрывает автоматическое инъекционное устройство, которое автоматически вводит заранее отмеренное количество жидкого лекарственного средства при освобождении пружины растяжения. Указанная пружина растяжения перемещает ампулу и инъекционную иглу из положения хранения в рабочее положение, когда она освобождается. Содержимое ампулы затем вытесняется с помощью пружины растяжения, толкающей поршень вперед внутрь ампулы. После того, как жидкое лекарственное средство было введено, кручение пружины растяжения освобождается, и инъекционная игла автоматически отводится в ее исходное положение хранения.
Лекарственные средства, обладающие высокой вязкостью, требуют больших усилий для вытеснения их через относительно тонкую инъекционную иглу. Для достижения таких усилий нужны сильные приводные пружины. Это может привести к сильному воздействию, ощущаемому пользователем при введении иглы под кожу, и к большим усилиям, прилагаемым пользователем для начала инъекции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предоставление усовершенствованного автоматического инъектора и усовершенствованного способа работы автоматического инъектора.
Данная задача решается с помощью автоматического инъектора, в соответствии с п.1 Формулы изобретения и посредством способа, в соответствии с п.9 Формулы изобретения.
В контексте данного описания термин проксимальный обозначает направление, указывающее в сторону пациента во время инъекции, тогда как термин дистальный обозначает противоположное направление, указывающее в сторону от пациента.
Предпочтительные варианты осуществления данного изобретения даны в зависимых пунктах Формулы изобретения.
Согласно данному изобретению, автоматический инъектор для введения дозы жидкого лекарственного препарата содержит:
- трубчатый каркас,
- несущий подузел, включающий в себя трубчатый несущий элемент, смонтированный с возможностью скольжения относительно указанного каркаса и частично расположенный внутри каркаса, причем, указанный несущий элемент содержит шприц с полой инъекционной иглой, приводную пружину и поршень для того, чтобы направлять нагрузку приводной пружины на ограничитель хода поршня шприца, в котором указанный шприц зафиксирован к указанному несущему элементу для совместного аксиального перемещения,
- перекрывающую манжету-инициатор (втулку пускового механизма), расположенную поверх дистального конца автоматического инъектора, причем, указанная манжета-инициатор занимает, по меньшей мере, почти всю длину автоматического инъектора,
- регулирующую пружину, расположенную вокруг указанного несущего элемента,
- первое блокировочное средство для соединения проксимального конца регулирующей пружины либо с указанным несущим элементом для продвижения его с целью введения иглы, либо с указанным каркасом для отведения иглы, в зависимости от относительного аксиального положения несущего элемента и манжеты-инициатора,
- второе блокировочное средство, обеспечивающее возможность освобождения приводной пружины для инъекции, когда указанный несущий элемент, по меньшей мере, почти достигает инъекционной глубины во время введения иглы,
- третье блокировочное средство, обеспечивающее возможность соединения указанного каркаса с указанным несущим элементом для совместного аксиального перемещения относительно указанной манжеты-инициатора, в котором третье блокировочное средство обеспечивает возможность разъединения указанного каркаса и указанного несущего элемента при перемещении указанной манжеты-инициатора в проксимальном направлении относительно указанного каркаса, таким образом, освобождая регулирующую пружину для введения иглы,
- четвертое блокировочное средство, обеспечивающее возможность соединения дистального конца указанной регулирующей пружины либо с несущим элементом для отведения иглы, либо, в противном случае, с манжетой-инициатором.
Несущий подузел вместе с интегрированной приводной пружиной позволяют применять сильную приводную пружину без какого-либо воздействия на пользователя при инициации автоматического инъектора или во время введения иглы, поскольку данным действиям способствует или противодействует регулирующая пружина, которая может быть определена как значительно более слабая, чем указанная приводная пружина. Это позволяет вводить лекарственные препараты высокой вязкости.
Освобождение приводной пружины при достижении иглой инъекционной глубины предотвращает так называемую влажную инъекцию, то есть вытекание лекарственного средства из иглы, что является проблемой для традиционных автоматических инъекторов, в которых и введение иглы, и инъекция осуществляются путем нажатия на ограничитель хода поршня шприца.
Автоматический инъектор, в соответствии с данным изобретением, имеет чрезвычайно малое количество деталей, по сравнению с большинством традиционных автоматических инъекторов, что, таким образом, снижает производственные затраты. Конструкция с отдельными регулирующей пружиной и приводной пружиной для инъекции текучей среды позволяет использовать одно техническое решение для жидкостей с различной вязкостью, посредством замены одной только приводной пружины, и для различных объемов просто путем изменения длины поршня. Это является преимуществом перед техническими решениями традиционного уровня техники, в которых главная пружина также служит источником энергии для введения и/или отведения иглы.
В исходном состоянии, то есть как при поставке, автоматического инъектора, проксимальный конец регулирующей пружины прикреплен к несущему элементу посредством первого блокировочного средства, освобождение приводной пружины предупреждается с помощью второго блокировочного средства, отсоединение каркаса от несущего элемента предотвращается посредством третьего блокировочного средства, и дистальный конец регулирующей пружины прикреплен к манжете-инициатору.
Для того чтобы инициировать инъекцию, автоматический инъектор должен быть прижат к месту инъекции, например, к коже пациента. Пользователь, например, сам пациент или лицо, ухаживающее за пациентом, захватывает рукой перекрывающую манжету-инициатор и нажимает каркасом, выступающим из проксимального конца, на место инъекции. Автоматический инъектор, таким образом, особенно подходит людям, у которых имеются проблемы с физической ловкостью, поскольку, в отличие от традиционных автоматических инъекторов известного уровня техники, приведение в действие не требует манипуляций с мелкими кнопками пальцами отдельно. Вместо этого используется кисть руки целиком.
При нажатии на место инъекции, указанная манжета-инициатор перемещается в проксимальном направлении относительно указанного каркаса, преодолевая сопротивление регулирующей пружины. Третье блокировочное средство отсоединяется, когда манжета-инициатор, по меньшей мере, почти полностью перемещена, тем самым, освобождая регулирующую пружину для продвижения несущего подузла для введения иглы.
Как только игла, перемещаемая вместе с несущим подузлом, по меньшей мере, почти достигает глубины инъекции, приводная пружина освобождается посредством второго блокировочного средства. Указанная приводная пружина продвигает поршень и ограничитель хода поршня в проксимальном направлении для, по меньшей мере, частичного введения лекарственного препарата.
Если автоматический инъектор удаляют с места инъекции после того, как указанный ограничитель хода поршня коснулся дна шприца или посреди инъекции, то манжета-инициатор перемещается в дистальном направлении под воздействием регулирующей пружины относительно несущего подузла.
Как только манжета-инициатор достигает заданного положения относительно несущего элемента во время такого движения, проксимальный конец регулирующей пружины отсоединяется от указанного несущего элемента и присоединяется к каркасу с помощью первого блокировочного средства. Кроме того, дистальный конец регулирующей пружины отсоединяется от манжеты-инициатора и присоединяется к несущему элементу с помощью четвертого блокировочного средства.
Поскольку теперь регулирующая пружина давит на каркас в проксимальном направлении, а на несущий элемент в дистальном направлении, несущий подузел отводится внутрь каркаса в безопасное положение иглы посредством регулирующей пружины.
Первое блокировочное средство может содержать проксимальный фланец для передачи нагрузки проксимального конца регулирующей пружины. Указанный проксимальный фланец зацепляется с помощью резьбы на несущем элементе в исходном состоянии. Указанный проксимальный фланец имеет штифт, предусмотренный для крепления в первой продольной канавке в манжете-инициаторе в исходном состоянии, для того чтобы предотвратить вращение проксимального фланца и для присоединения его к несущему элементу путем нажатия на резьбу. При перемещении каркаса и несущего элемента в проксимальном направлении относительно указанной манжеты-инициатора во время удаления автоматического инъектора с места инъекции, указанный штифт смещается за пределы проксимального конца первой продольной канавки, например, в зазор, и таким образом, освобождается, так что проксимальный фланец может вращаться и перемещаться относительно несущего элемента под воздействием регулирующей пружины, то есть указанный проксимальный фланец отсоединяется от несущего элемента. Регулирующая пружина перемещает проксимальный фланец в проксимальном направлении до тех пор, пока он не окажется вплотную к каркасу.
Второе блокировочное средство может содержать два упругих участка, расположенных с дистального конца поршня. Указанные упругие участки имеют упорный торец для проксимального конца приводной пружины. Дистальный конец приводной пружины оказывает воздействие на несущий элемент, например, торцевую поверхность несущего элемента. Первый выступ выдается в проксимальном направлении внутрь несущего элемента из дистальной торцевой поверхности инициатора указанной манжеты-инициатора. Указанный первый выступ в исходном состоянии располагается между указанными двумя упругими участками, таким образом, предотвращая их изгибание в направлении друг друга. Ряд выступающих элементов располагается внутри несущего элемента для соответственного фиксирования одного из упругих участков с целью предотвращения перемещения поршня в проксимальном направлении в исходном состоянии. Во время введения иглы, несущий элемент смещается в проксимальном направлении относительно манжеты-инициатора. Указанный выступ, таким образом, удаляется из промежутка между упругими участками, когда несущий элемент, по меньшей мере, почти достиг инъекционной глубины во время введения иглы, следовательно, давая возможность упругим участкам изогнуться в направлении внутрь, благодаря их наклонному сцеплению с выступающими элементами под воздействием нагрузки приводной пружины. В результате, поршень освобождается для продвижения ограничителя хода поршня и доставки лекарственного средства.
В терминологии данного описания, наклонное сцепление представляет собой сцепление между двумя компонентами, при том что, по меньшей мере, один из них имеет наклонный участок для сцепления с другим компонентом таким способом, чтобы один из указанных компонентов отклонялся в сторону при аксиальном нажатии данных компонентов друг на друга, при условии, что отклонение в сторону данного компонента не запрещено.
Третье блокировочное средство может содержать, по меньшей мере, один упругий зажим на указанном каркасе, зафиксированный в соответствующем отверстии в несущем элементе в исходном состоянии, для соединения указанного каркаса с указанным несущим элементом. По меньшей мере, один второй выступ располагается в указанной манжете-инициаторе, для того чтобы поддерживать снаружи указанный упругий зажим с целью предотвращения его изгибания в направлении наружу и отсоединения несущего элемента от каркаса в исходном состоянии. Указанный второй выступ удаляется сзади указанного упругого зажима при перемещении манжеты-инициатора в проксимальном направлении относительно каркаса, когда автоматический инъектор прижимается к месту инъекции. Упругий зажим затем отгибается в направлении наружу, благодаря его наклонному сцеплению с несущим элементом под воздействием регулирующей пружины, освобождая регулирующую пружину для введения иглы.
Четвертое блокировочное средство может содержать дистальный фланец для передачи нагрузки дистального конца регулирующей пружины. Указанный дистальный фланец и манжета-инициатор могут быть соединены с помощью байонетного соединения, ограничивающего перемещение дистального фланца относительно манжеты-инициатора в дистальном направлении в, по меньшей мере, одном фиксированном наклонном положении дистального фланца. В, по меньшей мере, одном разблокированном наклонном положении байонетного соединения указанный дистальный фланец может перемещаться относительно манжеты-инициатора в дистальном направлении. Указанное соответственное наклонное положение определяется посредством шлицевого соединения дистального фланца с несущим элементом. Указанный дистальный фланец находится в фиксированном наклонном положении в исходном состоянии и остается в таком положении благодаря указанному шлицевому соединению. При перемещении каркаса и несущего элемента в проксимальном направлении во время удаления автоматического инъектора с места инъекции, дистальный фланец поворачивается в разблокированное наклонное положение посредством указанного шлицевого соединения, тем самым, отсоединяя его от манжеты-инициатора. Затем дистальный фланец перемещается в дистальном направлении относительно манжеты-инициатора под воздействием регулирующей пружины в положение, в котором он упирается во внешнее плечо на несущем элементе, который затем перемещается в дистальном направлении для отведения назад.
Указанное байонетное соединение может содержать, по меньшей мере, один третий выступ, расположенный по окружности, предпочтительно, ряд равномерно отстоящих друг от друга третьих выступов на внутренней поверхности манжеты-инициатора, и соответствующее количество расположенных по окружности четвертых выступов на наружной поверхности дистального фланца. В указанном фиксированном наклонном положении соответствующие пары третьих выступов и четвертых выступов являются, по существу, выровненными таким образом, чтобы упираться друг в друга, тем самым, предотвращая перемещение дистального фланца в дистальном направлении. При перемещении каркаса и несущего элемента в проксимальном направлении во время удаления автоматического инъектора с места инъекции, дистальный фланец поворачивается посредством шлицевого соединения в разблокированное наклонное положение, таким образом, смещая соответствующие пары третьих выступов и четвертых выступов так, чтобы дать возможность дистальному фланцу перемещаться в дистальном направлении, например, путем прохождения третьих выступов в промежутки между четвертыми выступами и наоборот.
Указанное шлицевое соединение может содержать, по меньшей мере, один продольный шлиц на несущем элементе, сцепленный с соответствующей второй продольной канавкой на внутренней поверхности дистального фланца. Указанный шлиц является, по существу, параллельным для поддержания дистального фланца в фиксированном наклонном положении, но заканчивается резьбой ходового винта возле его дистального конца для поворота дистального фланца в разблокированное наклонное положение. Указанная вторая продольная канавка сформирована на, по существу, параллельном участке указанного шлица в исходном состоянии для поддержания дистального фланца в фиксированном наклонном положении до удаления автоматического инъектора с места инъекции. Вторая продольная канавка передвигается по шлицу при перемещении каркаса и несущего элемента в проксимальном направлении, когда автоматический инъектор удаляется с места инъекции, и задействует указанную резьбу ходового винта для поворота дистального фланца в разблокированное наклонное положение.
Само собой разумеется, что шлицы или резьба между двумя компонентами могут располагаться либо так, что шлиц находится на одном компоненте, а канавка на другом, либо наоборот.
Для того чтобы обеспечить безопасность иглы под воздействием сил инерции, например, когда автоматический инъектор интенсивно сотрясается после применения, может быть предусмотрено защелкивающее устройство между каркасом и несущим элементом для их фиксации друг к другу при отведении несущего элемента в безопасное положение иглы.
Фиксирующее устройство может обеспечивать возможность противоположного перемещения каркаса относительно манжеты-инициатора, для того чтобы инициировать введение иглы, таким образом, обеспечивая автоматический инъектор двухэтапным ударным механизмом.
Описываемый автоматический инъектор может, предпочтительно, использоваться для подкожных или внутримышечных инъекций, в частности, для введения болеутоляющего средства, антикоагулянта, инсулина, производного инсулина, гепарина, препарата Lovenox, вакцины, гормона роста, пептидного гормона, протеина, антител и сложных углеводов.
Дальнейший объем применимости настоящего изобретения станет очевидным из подробного описания, которое дается ниже в данном документе. Однако, следует учитывать, что указанное подробное описание и конкретные примеры, наряду с отражением предпочтительных вариантов осуществления данного изобретения, даются только в качестве иллюстраций, поскольку многочисленные изменения и усовершенствования в пределах сущности и объема данного изобретения будут очевидны специалистам в данной области из нижеследующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет более полно представлено с помощью подробного описания, которое дается ниже, и прилагаемых чертежей, которые приведены только в качестве иллюстрации, и, таким образом, не являются ограничительными для настоящего изобретения, и в котором:
Фиг.1(А-В) иллюстрирует автоматический инъектор со шприцем в исходном состоянии до активации,
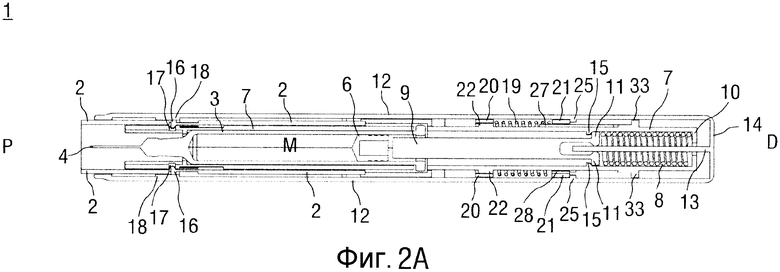
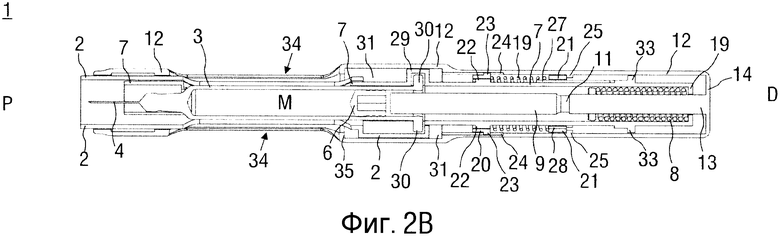
Фиг.2(А-В) иллюстрирует автоматический инъектор с удаленной защитной крышкой для шприца, прижатый к месту инъекции,
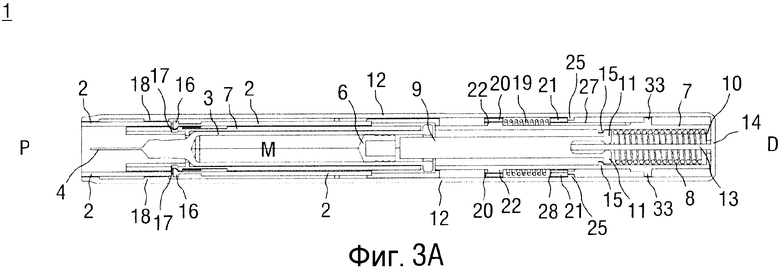
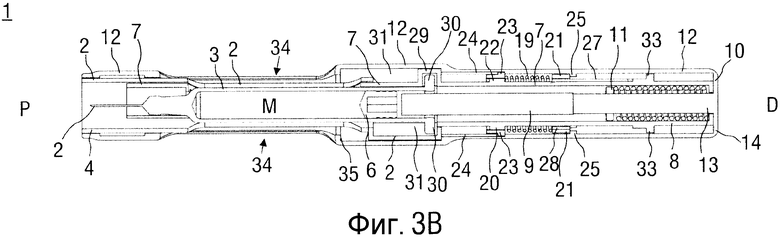
Фиг.3(А-В) иллюстрирует автоматический инъектор с полностью нажатой пусковой кнопкой манжеты-инициатора,
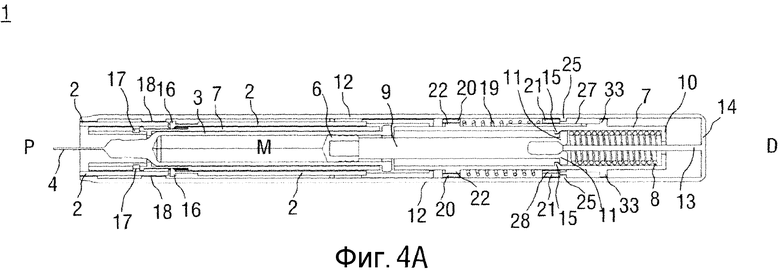
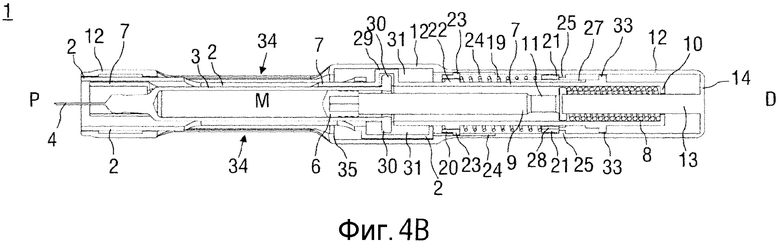
Фиг.4(А-В) иллюстрирует автоматический инъектор с инъекционной иглой, введенной в место инъекции,
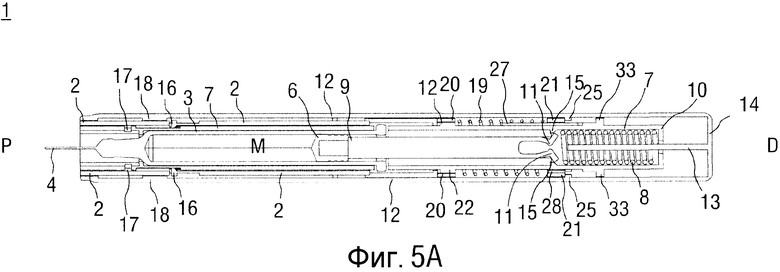
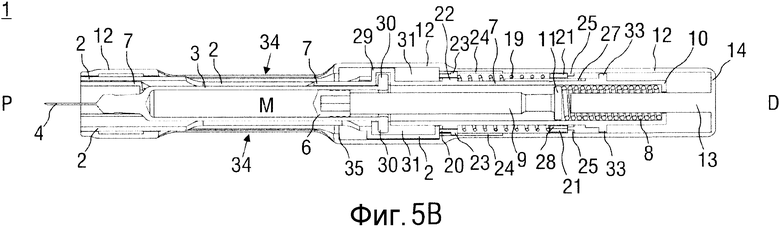
Фиг.5(А-В) иллюстрирует автоматический инъектор с приводной пружиной, которая освобождена для инъекции,
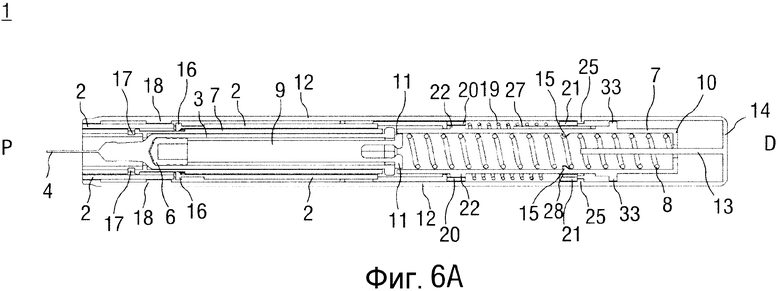
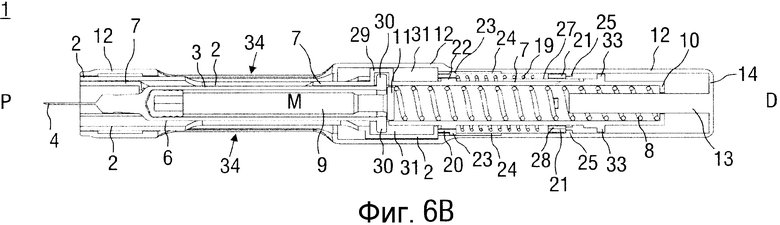
Фиг.6(А-В) иллюстрирует автоматический инъектор с опустошенным шприцем,
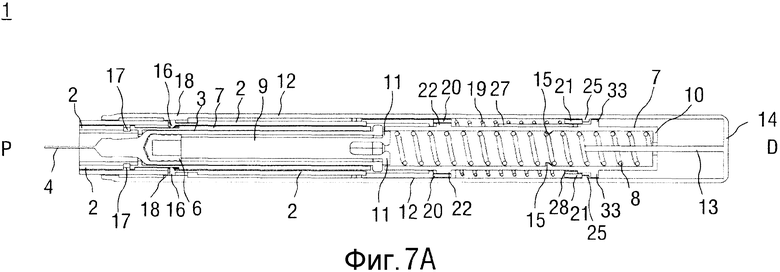
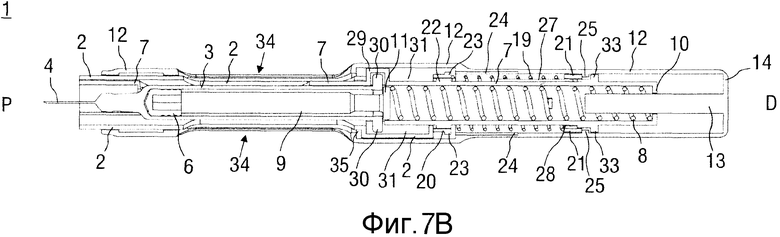
Фиг.7(А-В) иллюстрирует автоматический инъектор, удаленный с места инъекции после окончания инъекции,
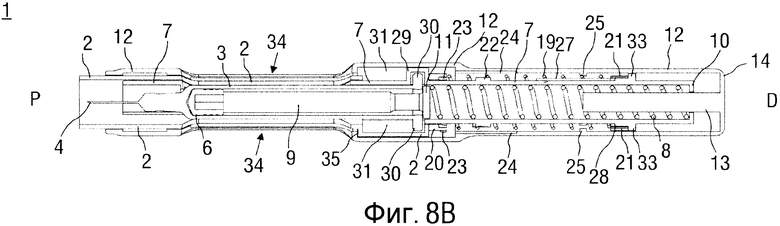
Фиг.8(А-В) иллюстрирует автоматический инъектор со шприцем и иглой, отведенной в безопасное положение иглы,
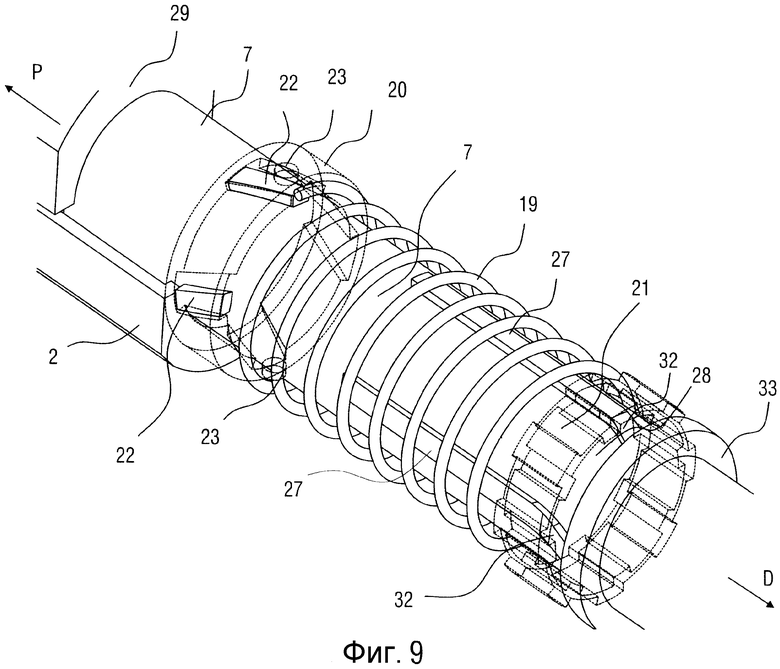
на Фиг.9 изображен подробный вид автоматического инъектора с регулирующей пружиной, проксимальным фланцем и дистальным фланцем в положении, изображенном на Фиг.7, и
на Фиг.10 изображен еще один подробный вид автоматического инъектора с регулирующей пружиной, проксимальным фланцем и дистальным фланцем в положении, изображенном на Фиг.7.
Соответствующие детали обозначены одними и теми же условными обозначениями на всех чертежах.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На Фиг.1(А-В) изображены два вида автоматического инъектора 1 в продольном сечении в разных плоскостях сечения, причем, указанные разные плоскости сечения повернуты относительно друг друга приблизительно на 90°, в котором автоматический инъектор 1 находится в исходном состоянии перед началом инъекции. Автоматический инъектор 1 содержит каркас 2. Шприц 3, например, шприц HYPAK, с полой инъекционной иглой 4 расположен в проксимальной части автоматического инъектора 1. В собранном виде автоматического инъектора 1 или шприца 3, защитная крышка 5 для шприца прикреплена к игле 4. Ограничитель 6 хода обеспечивает уплотнение шприца 3 дистально и вытеснение жидкого лекарственного средства М через полую иглу 4. Шприц 3 содержится в трубчатом несущем элементе 7 и поддерживается внутри него своим проксимальным концом. Несущий элемент 7 расположен внутри каркаса 2 с возможностью скольжения.
Приводная пружина 8 в форме пружины сжатия находится в дистальной части несущего элемента 7. Поршень 9 служит для подачи усилия приводной пружины 8 на ограничитель 6 хода.
Указанная приводная пружина 8 установлена между дистальной торцевой поверхностью 10 несущего элемента 7 и упорным торцом на двух упругих участках 11, расположенных дистально на поршне 9.
Перекрывающая манжета-инициатор 12 расположена поверх дистального конца D автоматического инъектора 1, занимая почти всю длину автоматического инъектора 1. Первый выступ 13 выдается в проксимальном направлении Р из дистальной торцевой поверхности 14 инициатора указанной манжеты-инициатора 12 между двумя упругими участками 11, таким образом, предотвращая их изгибание в направлении друг друга. Снаружи указанные упругие участки 11 оказываются позади соответственных выступающих элементов 15 в несущем элементе 7, так чтобы предотвращалось перемещение поршня 9 в проксимальном направлении Р. Указанные выступающие элементы 15 дистально наклонены таким образом, чтобы упругие участки 11 изгибались в направлении внутрь под воздействием приводной пружины 8, что предотвращается посредством первого выступа 13 в исходном состоянии.
Несущий элемент 7 зафиксирован к каркасу 2 возле проксимального конца Р автоматического инъектора 1 посредством двух упругих зажимов 16 на каркасе 2, вставленных в соответствующие отверстия 17 в несущем элементе 7. В исходном состоянии указанные упругие зажимы 16 поддерживаются снаружи соответствующими вторыми выступами 18 в манжете-инициаторе 12, для того чтобы предотвратить изгибание упругих зажимов 16 в направлении наружу и отсоединение несущего элемента 7 от каркаса 2.
Регулирующая пружина 19, имеющая вид еще одной пружины сжатия, расположена вокруг несущего элемента 7 и действует между проксимальным фланцем 20 и дистальным фланцем 21. Проксимальный фланец 20 установлен на несущем элементе 7 с помощью резьбы 22 (см. Фиг.9), но также он прикреплен к манжете-инициатору 12 посредством штифта 23 на наружной поверхности проксимального фланца 20, который входит в первую продольную канавку 24 в манжете-инициаторе 12 (см. Фиг.10). Следовательно, нагрузка от проксимального конца регулирующей пружины 19 соединяется с несущим элементом 7 в исходном состоянии. Дистальный фланец 21 соединяется с манжетой-инициатором 12 с помощью байонетного соединения, а также прикрепляется шлицами к несущему элементу 7, таким образом, предотвращая размыкание байонетного соединения. Указанное байонетное соединение содержит ряд расположенных по окружности третьих выступов 25 на внутренней поверхности манжеты-инициатора 12 и соответствующее количество расположенных по окружности четвертых выступов 26 на наружной поверхности дистального фланца 21. В исходном состоянии соответствующие пары третьих выступов 25 и четвертых выступов 26 являются, по существу, выровненными таким образом, чтобы упираться друг в друга, тем самым, предотвращая перемещение дистального фланца 21 в дистальном направлении D (см. Фиг.10). Указанное шлицевое соединение содержит ряд продольных шлицев 27 на несущем элементе 7, каждый из которых сцеплен с соответствующей второй продольной канавкой 28 на внутренней поверхности дистального фланца 21 (см. Фиг.9 и 10), таким образом, ограничивая относительное вращение дистального фланца 21 и несущего элемента 7 и, следовательно, предупреждая расцепление байонетного соединения.
Манжета-инициатор 12 способна двигаться в проксимальном направлении Р относительно несущего элемента 7 противоположно усилию регулирующей пружины 19. Поскольку несущий элемент 7 изначально зафиксирован к каркасу 2, перемещение манжеты-инициатора 12 в проксимальном направлении Р сжимает регулирующую пружину 19, причем проксимальный фланец 20 остается в исходном состоянии и причем дистальный фланец 21 перемещается вместе с манжетой-инициатором 12. Вытяжение манжеты-инициатора 12 в дистальном направлении D относительно каркаса 2 может быть определено с помощью плеча на каркасе 2, контактирующего с наружной поверхностью манжеты-инициатора 12 (не показано).
Порядок работы автоматического инъектора 1 описан ниже:
защитная крышка 5 для шприца удаляется с проксимального конца Р. Игла 4 теперь обнажена, но по-прежнему находится на безопасном расстоянии внутри каркаса 2 для защиты пользователя от случайных повреждений от уколов иглой. Несущий элемент 7 имеет углубление-держатель 29 для размещения упора 30 для пальцев на шприце 3. Манжета-инициатор 12 содержит расширенный участок 31 для расположения в нем углубления-держателя 29 так, чтобы ограничить относительное вращение манжеты-инициатора 12 и несущего элемента 7 и в то же время дать возможность перемещения в продольном направлении. Таким образом, вращение иглы 4 предотвращается.
Любое аксиальное усилие, прикладываемое к несущему элементу 7 во время удаления защитной крышки 5 для шприца, устраняется за счет несущего элемента 7, зафиксированного к каркасу 2 с помощью упругих зажимов 16. Каркас 2 упирается в манжету-инициатор 12 в месте расположения упора 35 так, чтобы предотвратить дальнейшее перемещение каркаса 2 в проксимальном направлении Р. Поскольку защитная крышка 5 для шприца удаляется, аксиальное усилие, прикладываемое к каркасу 2, таким образом, устраняется за счет манжеты-инициатора 12, которую держит пользователь. Удалению защитной крышки 5 для шприца может способствовать колпачок, расположенный на проксимальном конце Р в исходном состоянии, причем, указанный колпачок сцепляется с защитной крышкой 5 для шприца (колпачок не показан).
Для того, чтобы инициировать инъекцию, пользователь, то есть пациент или лицо, ухаживающее за пациентом, помещает проксимальный конец Р автоматического инъектора 1 на место инъекции, например, на кожу пациента, и надавливает на место инъекции с помощью манжеты-инициатора 12 (см. Фиг.2(А-В)). Каркас 2, вместе со всеми внутренними деталями, перемещается в дистальном направлении D внутрь манжеты-инициатора 12. Пользователь отчетливо представит себе данное перемещение каркаса 2 как вдавливание контактирующей с кожей оболочки. Регулирующая пружина 19 сопротивляется данному движению, но она спроектирована таким образом, что ее жесткость и натяг достаточно низки, чтобы это почувствовать. Данное перемещение является вполне обратимым, то есть пользователь может поместить автоматический инъектор на место инъекции, надавить на каркас 2 (контактирующую с кожей оболочку) и удалить автоматический инъектор 1 с места инъекции, не активировав его, тем самым, давая возможность каркасу 2 и манжете-инициатору 12 вернуться в их исходное положение под воздействием регулирующей пружины 19.
Автоматический инъектор 1 дополнительно может иметь двухэтапный ударный механизм. В таком случае, дальнейшему перемещению из положения, изображенного на Фиг.2, будет противодействовать фиксирующее устройство (не показано).
Когда пользователь готов, он продолжает нажимать проксимальным концом Р автоматического инъектора на место инъекции, держа манжету-инициатор 12. Каркас 2 вместе со всеми внутренними деталями, зафиксированными к нему, сдвигается относительно манжеты-инициатора 12 в дистальном направлении D до тех пор, пока торцевая поверхность 10 несущего элемента не соприкоснется с торцевой поверхностью 14 инициатора на дистальном конце D автоматического инъектора 1 (см. Фиг.3(А-В))
Прямо перед тем, как достигается данное положение, второй выступ 18, фиксирующий несущий элемент 7 к каркасу 2, сдвигается в положение, в котором упругий зажим 16 имеет возможность изогнуться в направлении назад, благодаря его наклонному сцеплению с несущим элементом 7, который отклонен в проксимальном направлении Р посредством регулирующей пружины 19, надавливающей на проксимальный фланец 20. Блокировка между каркасом 2 и несущим элементом 7, следовательно, снимается. Затем регулирующая пружина 19 заставляет несущий элемент 7 двигаться в проксимальном направлении Р вместе со шприцем 3 и иглой 4, таким образом, вводя иглу 4 в место инъекции (см. Фиг.4(А-В)).
На Фиг.5(А-В) изображены несущий элемент 7, шприц 3 и игла 4, полностью выдвинутая в максимальное проксимальное положение, определяющее инъекционную глубину. Данное максимальное проксимальное положение ограничивается контактом углубления-держателя 29 с каркасом 2. Прямо перед тем, как достигается указанное максимальное проксимальное положение, несущий элемент 7, шприц 3, игла 4, приводная пружина 8 и поршень 9 перемещаются относительно манжеты-инициатора 12 настолько, чтобы первый выступ 13 был извлечен из промежутка между упругими участками 11, тем самым, освобождая поршень 9. Приводная пружина 8 нажимает на упругие участки 11 над выступающими элементами 15 в проксимальном направлении Р, благодаря их наклонному сцеплению, и поршень 9 начинает перемещаться в проксимальном направлении Р под воздействием приводной пружины 8. Приводная пружина 8 растягивается, поршень 9 контактирует с ограничителем 6 хода, и лекарственное средство М выталкивается через иглу 4.
Данное движение ограничителя 6 хода продолжается до тех пор, пока ограничитель 6 хода не коснется дна в шприце 3, тем самым, полностью опустошив шприц 3. Пользователя попросят продолжать оказывать давление на место инъекции в течение короткого периода времени, например, десяти секунд, для того чтобы убедиться в том, что инъекция успешно выполнена (см. Фиг.6(А-В)).
Тогда как пользователь начинает убирать автоматический инъектор 1 с места инъекции, каркас 2 вместе со всеми внутренними компонентами выдвигается из манжеты-инициатора 12 в проксимальном направлении Р посредством регулирующей пружины 19, действующей между дистальным фланцем 21, зафиксированным к манжете-инициатору 12, и проксимальным фланцем 20, зафиксированным к несущему элементу 7. Игла 4 пока не извлекается из места инъекции во время данного движения, поскольку это сделало бы автоматический инъектор 1 чувствительным к движению манжеты-инициатора 12 относительно места инъекции во время введения лекарственного препарата М, что привело бы к потенциальному преждевременному отведению иглы, в случае если пользователь случайно немного сдвинет автоматический инъектор 1 в процессе выполнения инъекции. Как следствие данного свойства, исходная глубина введения иглы не зависит от полного вдавливания каркаса (контакт с кожей), то есть глубина введения определяется с учетом каркаса 2.
Момент, в который начинается отведение иглы 4, происходит немного ранее того, как каркас 2 полностью выдвигается в исходное положение, чтобы можно было допустить погрешность размеров деталей и обеспечить, чтобы отведение всегда происходило до того, как каркас 2 прекратит движение относительно манжеты-инициатора 12. Однако, было бы возможно сконструировать каркас 2, имеющий более или менее проксимальное положение при удалении с места инъекции.
Незадолго до того, как каркас 2 достигает конечной точки своего перемещения, шлицевой механизм между проксимальным фланцем 20 и манжетой-инициатором 12 освобождается с помощью штифта 23 проксимального фланца 20, выходящего за первую продольную канавку 24. Это дает возможность проксимальному фланцу 20 поворачиваться на резьбе 22 относительно несущего элемента 7. По мере вращения проксимального фланца 20, он перемещается в проксимальном направлении Р относительно несущего элемента 7 и затем отсоединяется от него, в конечном итоге, входя в контакт с каркасом 2 (см. Фиг.7(А-В)). Теперь нагрузка на проксимальном конце регулирующей пружины 19 более не прикладывается к несущему элементу 7, но прикладывается к каркасу 2. На Фиг.9 и 10 изображена регулирующая пружина 19, проксимальный фланец 20 и дистальный фланец 21 в данной ситуации. Некоторые компоненты изображены пунктирными линиями как прозрачные детали, для того чтобы их взаимодействия стали понятными. Необходимо учитывать, что в реальности данные компоненты не обязательно должны быть прозрачными.
По мере того, как каркас 2 продолжает двигаться в проксимальном направлении Р к своему конечному проксимальному положению, дистальный фланец 21, аксиально зафиксированный относительно манжеты-инициатора 12, перемещается вдоль шлица 27 на несущем элементе 7. Указанный шлиц 27, который является, в целом, параллельным продольной оси, заканчивается резьбой 32 ходового винта. Это заставляет дистальный фланец 21 вращаться относительно несущего элемента 7. Когда дистальный фланец 21 вращается, байонетное соединение с манжетой-инициатором 12 размыкается. Соответствующие пары третьих выступов 25 и четвертых выступов 26 перестают быть выровненными, так что третьи выступы 25 имеют возможность пройти в промежутки между четвертыми выступами 26 и наоборот, таким образом, давая возможность перемещения дистального фланца 21 в дистальном направлении D. Дистальный фланец 21 контактирует с наружным плечом 33 на несущем элементе 7, тем самым, устраняя нагрузку с дистального конца регулирующей пружины 19 за счет несущего элемента 7.
Теперь, действуя между несущим элементом 7 и каркасом 2, регулирующая пружина 19 убирает несущий элемент 7 внутрь каркаса 2, извлекая иглу из места инъекции в процессе, таким образом, обеспечивая безопасность иглы после инъекции. Автоматический инъектор 1 может быть сконструирован так, чтобы отводить несущий элемент 7 то тех пор, пока торцевая поверхность 10 несущего элемента не соприкоснется с торцевой поверхностью 14 инициатора. Несущий элемент 7 может быть зафиксирован к каркасу 2 в этой точке посредством зажима (не показан) с целью предотвращения его смещения под воздействием сил инерции при интенсивном сотрясании.
Если пользователь вынужден удалить автоматический инъектор 1 с места инъекции до полного опустошения шприца, описанное движение каркаса 2 все равно будет осуществлено. Однако, в этом случае, шприц 3 будет полностью опустошен после удаления с места инъекции.
Автоматический инъектор 1 дополнительно может иметь двухэтапный ударный механизм. В таком случае, для того, чтобы инициировать инъекцию, пользователь, то есть пациент или лицо, ухаживающее за пациентом, помещает проксимальный конец Р автоматического инъектора 1 на место инъекции, например, на кожу пациента, и надавливает на место инъекции с помощью манжеты-инициатора 12 (см. Фиг.2). Каркас 2, вместе со всеми внутренними деталями, перемещается в дистальном направлении D внутрь манжеты-инициатора 12 до тех пор, пока фиксирующее устройство (не показано) не предотвратит дальнейшее перемещение. Пользователь отчетливо представит себе данное перемещение каркаса 2 как вдавливание контактирующей с кожей оболочки. Регулирующая пружина 19 сопротивляется данному движению, но она спроектирована таким образом, что ее жесткость и натяг достаточно низки, чтобы это почувствовать. Данное перемещение является вполне обратимым, то есть пользователь может поместить автоматический инъектор на место инъекции, надавить на каркас 2 (контактирующую с кожей оболочку) до положения фиксирующего элемента и удалить автоматический инъектор 1 с места инъекции, не активировав его, тем самым, давая возможность каркасу 2 и манжете-инициатору 12 вернуться в их исходное положение под воздействием регулирующей пружины 19. За исключением фиксирующего элемента, порядок работы автоматического инъектора 1 идентичен описанному выше.
Смотровые окошки 34 выполнены в виде отверстий в манжете-инициаторе 12, в каркасе 2 и в несущем элементе 7 для контроля содержимого шприца.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
1 автоматический инъектор
2 каркас
3 шприц
4 полая инъекционная игла
5 защитная крышка для шприца
6 ограничитель хода
7 несущий элемент
8 приводная пружина
9 поршень
10 торцевая поверхность несущего элемента
11 упругий участок
12 манжета-инициатор
13 первый выступ
14 торцевая поверхность инициатора
15 выступающий элемент
16 упругие зажимы
17 отверстие
18 второй выступ
19 регулирующая пружина
20 проксимальный фланец
21 дистальный фланец
22 резьба
23 штифт
24 первая продольная канавка
25 третий выступ
26 четвертый выступ
27 шлиц
28 вторая продольная канавка
29 углубление-держатель
30 упор для пальцев
31 расширенный участок
32 резьба ходового винта
33 плечо
34 смотровое окошко
35 упор
D - дистальный конец, дистальное направление
М - лекарственное средство/препарат
Р - проксимальный конец, проксимальное направление
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический инъектор для стандартных медицинских шприцов | 2016 |
|
RU2649504C1 |
| Автоматический инъектор для медицинских шприцов | 2018 |
|
RU2697226C1 |
| Автоматический инъектор для внутримышечных и подкожных инъекций для медицинских шприцов | 2018 |
|
RU2692975C1 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНО ЗАПОЛНЕННОГО ШПРИЦА И ИНЪЕКТОР | 2011 |
|
RU2567795C2 |
| АВТОИНЪЕКТОР | 2011 |
|
RU2585693C2 |
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607529C2 |
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607939C2 |
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607528C2 |
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607926C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИНЪЕКЦИЙ С ИНЪЕКЦИОННЫМ КАРТРИДЖЕМ И ПРИВОДНОЙ МЕХАНИЗМ ТАКОГО УСТРОЙСТВА | 2013 |
|
RU2649473C2 |


Изобретение относится к медицинской технике, а именно к автоматическим инъекторам для введения дозы жидкого лекарственного препарата. Инъектор содержит: трубчатый каркас, несущий подузел, перекрывающую манжету-инициатор, регулирующую пружину, четыре блокировочных средства. Причем несущий подузел включает в себя трубчатый несущий элемент, установленный с возможностью скольжения относительно каркаса и частично расположенный внутри каркаса, причем несущий элемент содержит шприц с полой инъекционной иглой, приводную пружину и поршень для того, чтобы направлять нагрузку приводной пружины на ограничитель шприца, где шприц зафиксирован с несущим элементом для совместного аксиального перемещения. Причем перекрывающая манжета-инициатор расположена поверх дистального конца автоматического инъектора (1) и проходит, по меньшей мере, почти по всей длине автоматического инъектора. Регулирующая пружина расположена вокруг несущего элемента. Первое блокировочное средство соединяет проксимальный конец регулирующей пружины либо с несущим элементом для продвижения его с целью введения иглы, либо с каркасом для отведения иглы, в зависимости от относительного аксиального положения несущего элемента и манжеты-инициатора. Второе блокировочное средство обеспечивает возможность освобождения приводной пружины для инъекции, когда несущий элемент почти достиг инъекционной глубины во время введения иглы. Третье блокировочное средство обеспечивает возможность соединения каркаса с несущим элементом для совместного аксиального перемещения относительно манжеты-инициатора, при этом третье блокировочное средство обеспечивает возможность разъединения каркаса и несущего элемента при перемещении манжеты-инициатора в проксимальном направлении относительно каркаса, таким образом, освобождая регулирующую пружину для введения иглы. Четвертое блокировочное средство обеспечивает возможность соединения дистального конца регулирующей пружины либо с несущим элементом для отведения иглы, либо, в противном случае, с манжетой-инициатором. Использование изобретения обеспечивает возможность введения лекарственных препаратов разной вязкости, в том числе высокой вязкости, и различных объемов; предотвращения вытекания лекарственного средства из иглы, возможность использования автоинъектора людьми с проблемами с физической ловкостью. 2 н. и 13 з.п. ф-лы, 10 ил.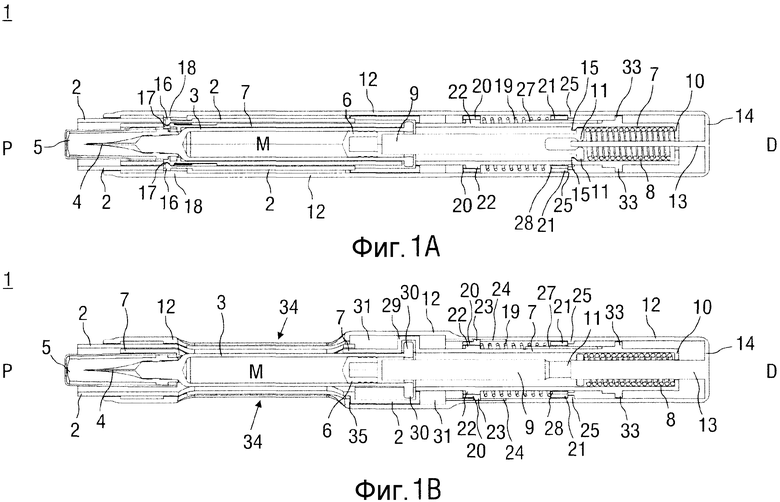
1. Автоматический инъектор (1) для введения дозы жидкого лекарственного препарата (М), содержащий:
- трубчатый каркас (2),
- несущий подузел, включающий в себя трубчатый несущий элемент (7), установленный с возможностью скольжения относительно указанного каркаса (2) и частично расположенный внутри каркаса (2), причем указанный несущий элемент (7) содержит шприц (3) с полой инъекционной иглой (4), приводную пружину (8) и поршень (9) для того, чтобы направлять нагрузку приводной пружины (8) на ограничитель (6) шприца (3), где указанный шприц (3) зафиксирован с указанным несущим элементом (7) для совместного аксиального перемещения,
- перекрывающую манжету-инициатор (12), расположенную поверх дистального конца (D) автоматического инъектора (1), причем указанная манжета-инициатор (12) проходит, по меньшей мере, почти по всей длине автоматического инъектора (1),
- регулирующую пружину (19), расположенную вокруг несущего элемента (7),
- первое блокировочное средство (20, 22, 23, 24) для соединения проксимального конца регулирующей пружины (19) либо с несущим элементом (7) для продвижения его с целью введения иглы, либо с каркасом (2) для отведения иглы, в зависимости от относительного аксиального положения несущего элемента (7) и манжеты-инициатора (12),
- второе блокировочное средство (11, 13, 15), обеспечивающее возможность освобождения приводной пружины (8) для инъекции, когда несущий элемент (7), по меньшей мере, почти достиг инъекционной глубины во время введения иглы,
- третье блокировочное средство (16, 17, 18), обеспечивающее возможность соединения каркаса (2) с несущим элементом (7) для совместного аксиального перемещения относительно манжеты-инициатора (12), при этом третье блокировочное средство (16, 17, 18) обеспечивает возможность разъединения каркаса (2) и несущего элемента (7) при перемещении манжеты-инициатора (12) в проксимальном направлении (Р) относительно каркаса (2), таким образом, освобождая регулирующую пружину (19) для введения иглы,
- четвертое блокировочное средство (21, 25, 26, 28), обеспечивающее возможность соединения дистального конца регулирующей пружины (19) либо с несущим элементом (7) для отведения иглы, либо, в противном случае, с манжетой-инициатором (12).
2. Автоматический инъектор (1) по п.1, отличающийся тем, что первое блокировочное средство (20, 22, 23, 24) содержит проксимальный фланец (20) для передачи нагрузки проксимального конца регулирующей пружины (19), причем проксимальный фланец (20) выполнен с возможностью зацепления с помощью резьбы (22) на несущем элементе (7) в исходном состоянии, причем проксимальный фланец (20) имеет штифт (23), предусмотренный для крепления в первой продольной канавке (24) в манжете-инициаторе (12) в исходном состоянии для того, чтобы предотвратить вращение проксимального фланца (20) и для присоединения его к несущему элементу (7), при этом первая продольная канавка (24) выполнена с возможностью освобождения штифта (23) при перемещении каркаса (2) и несущего элемента (7) в проксимальном направлении (Р) под воздействием нагрузки регулирующей пружины (19), когда автоматический инъектор (1) удаляется с места инъекции, тем самым давая возможность проксимальному фланцу (20) вращаться и перемещаться относительно несущего элемента (7) под воздействием нагрузки регулирующей пружины (19) и впоследствии упереться в каркас (2).
3. Автоматический инъектор (1) по любому из пп.1 или 2, отличающийся тем, что второе блокировочное средство (11, 13, 15) содержит два упругих участка (11), расположенных дистально на поршне (9), причем упругие участки (11) имеют упорный торец для приводной пружины (8), где первый выступ (13) выдается в проксимальном направлении (Р) из дистальной торцевой поверхности (14) инициатора манжеты-инициатора (12), при этом первый выступ (13) выполнен с возможностью расположения между указанными двумя упругими участками (11), таким образом, предотвращая их изгибание в направлении друг друга, причем выступающие элементы (15) расположены внутри несущего элемента (7) для соответственного фиксирования одного из упругих участков (11) с целью предотвращения перемещения поршня (9) в проксимальном направлении (Р), где первый выступ (13) выполнен с возможностью удаления из промежутка между упругими участками (11), таким образом, давая им возможность изогнуться в направлении внутрь, благодаря их наклонному сцеплению с выступающими элементами (15) под воздействием нагрузки приводной пружины (8), и давая возможность поршню (9) освободиться, когда несущий элемент (7), по меньшей мере, почти достиг инъекционной глубины во время введения иглы.
4. Автоматический инъектор (1) по п.1, отличающийся тем, что третье блокировочное средство (16, 17, 18) содержит, по меньшей мере, один упругий зажим (16) на каркасе (2), выполненный с возможностью фиксации в соответствующем отверстии (17) в несущем элементе (7), где, по меньшей мере, один второй выступ (18) расположен в манжете-инициаторе (12) для того, чтобы поддерживать снаружи упругий зажим (16) с целью предотвращения его изгибания в направлении наружу и отсоединения несущего элемента (7) от каркаса (2), при этом второй выступ (18) выполнен с возможностью удаления сзади указанного упругого зажима (16) при перемещении манжеты-инициатора (12) в проксимальном направлении (Р) относительно каркаса (2), тем самым давая возможность упругому зажиму отогнуться в направлении наружу, благодаря его наклонному сцеплению с несущим элементом (7) под воздействием нагрузки регулирующей пружины (19).
5. Автоматический инъектор (1) по п.1, отличающийся тем, что четвертое блокировочное средство (21, 25, 26, 28) содержит дистальный фланец (21) для передачи нагрузки дистального конца регулирующей пружины (19), причем указанный дистальный фланец (21) и манжета-инициатор (12) соединяются с помощью байонетного соединения, ограничивающего перемещение дистального фланца (21) относительно манжеты-инициатора (12) в дистальном направлении (D) в, по меньшей мере, одном фиксированном наклонном положении дистального фланца (21) и позволяющего перемещение дистального фланца (21) относительно манжеты-инициатора (12) в дистальном направлении (D) в, по меньшей мере, одном разблокированном наклонном положении дистального фланца (21), при этом соответственное наклонное положение определяется посредством шлицевого соединения дистального фланца (21) с несущим элементом (7), причем дистальный фланец (21) выполнен с возможностью вращения в разблокированное наклонное положение при перемещении каркаса (2) и несущего элемента (7) в проксимальном направлении (Р) под воздействием нагрузки регулирующей пружины (19) во время удаления автоматического инъектора (1) с места инъекции, тем самым давая возможность перемещения дистального фланца (21) относительно манжеты-инициатора (12) под воздействием нагрузки регулирующей пружины (19) в дистальном направлении (D) и давая возможность дистальному фланцу (21) впоследствии упереться во внешнее плечо (33) на несущем элементе (7) для отведения.
6. Автоматический инъектор (1) по п.5, отличающийся тем, что байонетное соединение содержит, по меньшей мере, один третий выступ (25), расположенный по окружности, на внутренней поверхности манжеты-инициатора (12), и соответствующее количество расположенных по окружности четвертых выступов (26) на наружной поверхности дистального фланца (21), где в указанном фиксированном наклонном положении соответствующие пары третьих выступов (25) и четвертых выступов (26) являются, по существу, выровненными таким образом, чтобы упираться друг в друга, тем самым предотвращая перемещение дистального фланца (21) в дистальном направлении (D), при этом в разблокированном наклонном положении соответствующие пары третьих выступов (25) и четвертых выступов (26) смещаются так, чтобы дать возможность дистальному фланцу (21) перемещаться в дистальном направлении (D).
7. Автоматический инъектор (1) по одному из пп.5 или 6, отличающийся тем, что шлицевое соединение содержит, по меньшей мере, один продольный шлиц (27) на несущем элементе (7), сцепленный с соответствующей второй продольной канавкой (28) на внутренней поверхности дистального фланца (21), где указанный шлиц (27) является, по существу, параллельным для поддержания дистального фланца (21) в фиксированном наклонном положении, но заканчивается резьбой (32) ходового винта возле его дистального конца для поворота дистального фланца (21) в разблокированное наклонное положение.
8. Автоматический инъектор (1) по п.1, отличающийся тем, что предусмотрено фиксирующее устройство для противоположного перемещения каркаса (2) относительно манжеты-инициатора (12) для того, чтобы инициировать введение иглы.
9. Способ работы автоматического инъектора (1), где автоматический инъектор (1) содержит:
- трубчатый каркас (2),
- несущий подузел, включающий в себя трубчатый несущий элемент (7), установленный с возможностью скольжения относительно указанного каркаса (2) и частично расположенный внутри каркаса (2), причем указанный несущий элемент (7) содержит шприц (3) с полой инъекционной иглой (4), приводную пружину (8) и поршень (9) для того, чтобы направлять нагрузку приводной пружины (8) на ограничитель (6) хода поршня шприца (3), в котором указанный шприц (3) зафиксирован с указанным несущим элементом (7) для совместного аксиального перемещения,
- перекрывающую манжету-инициатор (12), расположенную поверх дистального конца (D) автоматического инъектора (1), причем указанная манжета-инициатор (12) проходит, по меньшей мере, почти по всей длине автоматического инъектора (1),
- регулирующую пружину (19), расположенную вокруг указанного несущего элемента (7),
- первое блокировочное средство (20, 22, 23, 24) для соединения проксимального конца регулирующей пружины (19) либо с указанным несущим элементом (7), либо с указанным каркасом (2),
- второе блокировочное средство (11, 13, 15), предусмотренное для фиксации приводной пружины (8),
- третье блокировочное средство (16, 17, 18), предусмотренное для соединения указанного каркаса (2) с указанным несущим элементом (7),
- четвертое блокировочное средство (21, 25, 26, 28), предусмотренное для соединения дистального конца указанной регулирующей пружины (19) либо с несущим элементом (7), либо с манжетой-инициатором (12),
причем способ включает в себя следующие этапы:
- соединение проксимального конца регулирующей пружины (19) с несущим элементом (7) с помощью первого блокировочного средства (20, 23, 24), предотвращение освобождения приводной пружины (8) посредством второго блокировочного средства (11, 13, 15), предотвращение отсоединения каркаса (2) от несущего элемента (7) посредством третьего блокировочного средства (16, 17, 18) и присоединение дистального конца регулирующей пружины (19) к манжете-инициатору (12) в исходном состоянии,
- перемещение манжеты-инициатора (12) в проксимальном направлении (Р) относительно каркаса (2) против усилия регулирующей пружины (19), когда проксимальный конец (Р) автоматического инъектора (1) надавливает на место инъекции,
- разъединение третьего блокировочного средства (16, 17, 18), когда манжета-инициатор (12), по меньшей мере, почти полностью перемещена, тем самым освобождая регулирующую пружину (19) для продвижения несущего подузла для введения иглы,
- освобождение приводной пружины (8) с помощью второго блокировочного средства (11, 13, 15), когда игла (4), по меньшей мере, почти достигла инъекционной глубины во время введения иглы, тем самым давая возможность приводной пружине (8) продвигать поршень (9) и ограничитель (6) хода для, по меньшей мере, частичного введения лекарственного препарата (М),
- перемещение манжеты-инициатора (12) в дистальном направлении (D) под воздействием нагрузки регулирующей пружины (19) относительно несущего подузла при удалении автоматического инъектора (1) с места инъекции,
- отсоединение проксимального конца регулирующей пружины (19) от несущего элемента (7) и присоединение его к каркасу (2) с помощью первого блокировочного средства (20, 23, 24) и отсоединение дистального конца регулирующей пружины (19) от манжеты-инициатора (12) и присоединение его к несущему элементу (7) с помощью четвертого блокировочного средства (21, 25, 26, 28), когда манжета-инициатор (12) достигает заданного положения относительно несущего элемента (7),
- отведение несущего подузла внутрь каркаса (2) в безопасное положение иглы под воздействием регулирующей пружины (19).
10. Способ по п.9, отличающийся тем, что в первом блокировочном средстве (20, 22, 23, 24) предусматривают проксимальный фланец (20) для передачи нагрузки проксимального конца регулирующей пружины (19), где проксимальный фланец (20) зацепляется с помощью резьбы (22) на несущем элементе (7) в исходном состоянии, причем штифт (23) на проксимальном фланце (20) крепят в первой продольной канавке (24) в манжете-инициаторе (12) в исходном состоянии для того, чтобы предотвратить вращение проксимального фланца (20) и для присоединения его к несущему элементу (7), при этом при перемещении каркаса (2) и несущего элемента (7) в проксимальном направлении (Р) во время удаления автоматического инъектора (1) с места инъекции штифт (23) проходит за проксимальный конец первой продольной канавки (24), тем самым давая возможность регулирующей пружине (19) вращать и перемещать проксимальный фланец (20) относительно несущего элемента (7) в положение, в котором проксимальный фланец (20) упирается в каркас (2).
11. Способ по любому из пп.9 или 10, отличающийся тем, что во втором блокировочном средстве (11, 13, 15) предусматривают два упругих участка (11), расположенных дистально на поршне (9), причем упругие участки (11) имеют упорный торец для приводной пружины (8), где первый выступ (13) выдается в проксимальном направлении (Р) из дистальной торцевой поверхности (14) инициатора манжеты-инициатора (12), при этом первый выступ (13) располагают между указанными двумя упругими участками (11) в исходном состоянии, таким образом, предотвращая их изгибание в направлении друг друга, а выступающие элементы (15) располагают внутри несущего элемента (7) для соответственного фиксирования одного из упругих участков (11) с целью предотвращения перемещения поршня (9) в проксимальном направлении (Р), где первый выступ (13) удаляется из промежутка между упругими участками (11), когда несущий элемент (7), по меньшей мере, почти достиг инъекционной глубины во время введения иглы, таким образом, давая возможность упругим участкам (11) изогнуться в направлении внутрь, благодаря их наклонному сцеплению с выступающими элементами (15) под воздействием нагрузки приводной пружины (8), и освободить поршень (9).
12. Способ по п.9, отличающийся тем, что в третьем блокировочном средстве (16, 17, 18) устанавливают, по меньшей мере, один упругий зажим (16) на каркасе (2), зафиксированный в соответствующем отверстии (17) в несущем элементе (7) в исходном состоянии, где, по меньшей мере, один второй выступ (18) располагают в указанной манжете-инициаторе (12) для того, чтобы поддерживать снаружи указанный упругий зажим (16) с целью предотвращения его изгибания в направлении наружу и отсоединения несущего элемента (7) от каркаса (2) в исходном состоянии, при этом второй выступ (18) удаляется из положения сзади указанного упругого зажима (16) при перемещении манжеты-инициатора (12) в проксимальном направлении (Р) относительно каркаса (2), причем упругий зажим (16) последовательно изгибается в направлении наружу, благодаря его наклонному сцеплению с несущим элементом (7) под воздействием регулирующей пружины (19).
13. Способ по п.9, отличающийся тем, что предусматривают четвертое блокировочное средство (21, 25, 26, 28), содержащее дистальный фланец (21) для передачи нагрузки дистального конца регулирующей пружины (19), причем указанный дистальный фланец (21) и манжету-инициатор (12) соединяют с помощью байонетного соединения, ограничивающего перемещение дистального фланца (21) относительно манжеты-инициатора (12) в дистальном направлении (D) в, по меньшей мере, одном фиксированном наклонном положении дистального фланца (21) и позволяющего перемещение дистального фланца (21) относительно манжеты-инициатора (12) в дистальном направлении (D) в, по меньшей мере, одном разблокированном наклонном положении дистального фланца (21), при этом соответственное наклонное положение определяется посредством шлицевого соединения дистального фланца (21) с несущим элементом (7), где дистальный фланец (21) находится в фиксированном наклонном положении в исходном состоянии, причем дистальный фланец (21) поворачивается в разблокированное наклонное положение посредством шлицевого соединения при перемещении каркаса (2) и несущего элемента (7) в проксимальном направлении (Р) во время удаления автоматического инъектора (1) с места инъекции, и дистальный фланец (21) последовательно перемещается в дистальном направлении (D) относительно манжеты-инициатора (12) под воздействием нагрузки регулирующей пружины (19) в положение, в котором он упирается во внешнее плечо (33) на несущем элементе (7), который затем перемещается в дистальном направлении (D) для отведения.
14. Способ по п.13, отличающийся тем, что в байонетном соединении выполняют, по меньшей мере, один третий выступ (25), расположенный по окружности, на внутренней поверхности манжеты-инициатора (12), и соответствующее количество расположенных по окружности четвертых выступов (26) на наружной поверхности дистального фланца (21), где в исходном состоянии байонетное соединение установлено в фиксированном наклонном положении путем, по существу, выравнивания соответствующих пар третьих выступов (25) и четвертых выступов (26) таким образом, чтобы они упирались друг в друга, тем самым предотвращая перемещение дистального фланца (21) в дистальном направлении (D), при этом при перемещении каркаса (2) и несущего элемента (7) в проксимальном направлении (Р) при удалении автоматического инъектора (1) с места инъекции дистальный фланец (21) поворачивается с помощью шлицевого соединения в разблокированное наклонное положение, тем самым смещая соответствующие пары третьих выступов (25) и четвертых выступов (26) так, чтобы дать возможность дистальному фланцу (21) перемещаться в дистальном направлении (D).
15. Способ по одному из пп.13 или 14, отличающийся тем, что в шлицевом соединении предусмотрен, по меньшей мере, один продольный шлиц (27) на несущем элементе (7), сцепленный с соответствующей второй продольной канавкой (28) на внутренней поверхности дистального фланца (21), где вторая продольная канавка (28) сформирована на, по существу, параллельном участке указанного шлица (27) в исходном состоянии для поддержания дистального фланца (21) в фиксированном наклонном положении, при этом вторая продольная канавка (28) передвигается по шлицу (27) при перемещении каркаса (2) и несущего элемента (7) в проксимальном направлении (Р), когда автоматический инъектор (1) удаляют с места инъекции, и задействует указанную резьбу (32) ходового винта возле дистального конца шлица (27) для поворота дистального фланца (21) в разблокированное наклонное положение.
| Устройство для рихтовки длинномерных гибких элементов | 1985 |
|
SU1743666A1 |
| US2007027430 A1, 01.02.2007 | |||
| US2006224124 A1, 05.10.2006 | |||
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО С РЕДУКТОРОМ | 2001 |
|
RU2270698C2 |

