Область техники, к которой относится изобретение
Изобретение относится к автоматическому инъектору для введения дозы жидкого лекарственного средства в соответствии с преамбулой п. 1 формулы изобретения.
Уровень техники изобретения
Введение инъекции является процессом, который создает ряд рисков и проблем для пользователей и медицинских специалистов, как психических, так и физических.
Инъекционные устройства (т.е. устройства, способные вводить лекарственные средства из упаковки для лекарственных препаратов), обычно, подразделяются на две категории, ручные устройства и автоматические инъекторы.
В ручном устройстве, механическую энергию для вытеснения текучей среды через иглу должен обеспечивать пользователь. Данное действие, обычно, выполняют кнопкой/плунжером какой-то формы, на который пользователю приходится непрерывно нажимать во время инъекции. При данном подходе имеют место многочисленные неудобства для пользователя. Если пользователь прекратит нажимать кнопку/плунжер, то инъекция также прекратится. Это означает, что пользователь может ввести недостаточную дозу, если устройство применяется неправильно (т.е. плунжер не полностью нажат до его конечного положения). Усилия для инъекции могут быть слишком сильными для пользователя, в частности, если пациент является пожилым или имеет нарушения двигательных функций.
Выступающая часть кнопки/плунжера может быть слишком велика. Поэтому, пользователю может быть неудобно достать полностью выдвинутую кнопку. Сочетание усилия для инъекции и выступающей части кнопки может вызывать дрожание/тряску руки, что, в свою очередь, усиливает дискомфорт, так как введенная игла движется.
Автоматические инъекционные устройства предназначены, чтобы облегчать пациентам самостоятельное введение инъецируемых медикаментов. Современные медикаменты, вводимые посредством самостоятельно выполняемых инъекций, включают в себя лекарства от диабета (как инсулин, так и новые лекарства класса GLP-1), миграин, гормональные медикаменты, антикоагулянты и т.п.
Автоматические инъекторы являются устройствами, которые полностью или частично заменяют рабочие операции, предусмотренные при парентеральном введении лекарств из стандартных шприцов. Данные рабочие операции могут содержать снятие защитного колпачка шприца, введение иглы в кожу пациента, инъекцию лекарственного средства, извлечение иглы, укрытие иглы и предотвращение повторного использования устройства. Упомянутая замена устраняет многие из недостатков ручных устройств. Уменьшаются усилия для инъекции/выступающей части кнопки, дрожание рук и вероятность введения неполной дозы. Включение может выполняться многочисленными средствами, например, кнопкой спуска или воздействием иглы, достигающей ее глубины инъекции. В некоторых устройствах, энергия для введения текучей среды обеспечивается пружиной.
В документе США 2002/0095120 A1 предложено автоматическое инъекционное устройство, которое автоматически делает инъекцию предварительно дозированного количества текучего лекарственного препарата, когда освобождается натяжная пружина. Натяжная пружина перемещает ампулу и инъекционную иглу из положения хранения в положение использования, когда упомянутая пружина освобождается. Затем содержимое ампулы вытесняется натяжной пружиной, проталкивающей поршень вперед внутри ампулы. После того, как инъекция текучего лекарственного препарата сделана, закручивание, обеспеченное в натяжной пружине, деблокируется, и инъекционная игла автоматически отводится обратно в ее исходное положение хранения.
Высоковязкие лекарственные препараты требуют больших усилий для их вытеснения через относительно тонкую инъекционную иглу. Для обеспечения данных усилий необходимы сильные приводные пружины. Такие пружины могут приводить к сильному удару, ощущаемому пользователем, при введении иглы в кожу, и к большим усилиям, ощущаемым пользователем, при включении инъекции.
Сущность изобретения
Целью настоящего изобретения является создание усовершенствованного автоматического инъектора.
Цель достигается с помощью автоматического инъектора по п. 1 формулы изобретения.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
В контексте настоящего описания, термин проксимальный относится к направлению, указывающему на пациента во время инъекции, а термин дистальный относится к противоположному направлению, указывающему от пациента. Термин внутрь относится к радиальному направлению, указывающему к продольной оси автоматического инъектора, а термин наружу относится к противоположному направлению, указывающему радиально от продольной оси.
В соответствии с изобретением, автоматический инъектор для введения дозы жидкого лекарственного средства содержит:
- удлиненный трубчатый футляр,
- подузел оправы, содержащий трубчатую оправу, расположенную с возможностью сдвига внутри футляра, при этом, оправа выполнена с возможностью вмещения шприца с полой инъекционной иглой, приводной пружины и плунжера для передачи нагрузки от приводной пружины на пробку-поршень шприца, причем, шприц является фиксируемым для совместного аксиального поступательного перемещения с оправой, причем, приводная пружина действует между оправой и плунжером.
В исходном состоянии плунжер зафиксирован к оправе посредством наклонного зацепления с оправой и посредством блокирования от поворота из упомянутого наклонного зацепления, в зависимости от относительного продольного положения оправы в футляре, при этом, плунжер выполнен с возможностью деблокирования для поворота из наклонного зацепления после достижения иглой, по меньшей мере, почти предварительно заданной глубины инъекции, при поступательном перемещении оправы в проксимальном направлении для выдвижения иглы за пределы проксимального конца автоматического инъектора. Данный механизм деблокирования плунжера является особенно надежным и эффективным способом запуска инъекции лекарственного средства после достижения иглой глубины инъекции.
Деблокирование приводной пружины после достижения иглой глубины инъекции исключает, так называемую, мокрую инъекцию, т.е. вытекание лекарственного средства из иглы, что составляет проблему в традиционных автоматических инъекторах, в которых как введение иглы, так и инъекция выполняются нажимом на пробку-поршень.
В одном варианте осуществления изобретения, оправа имеет продольный вырез, при этом, на плунжере расположен внешний выступ таким образом, чтобы входить в зацепление с поверхностью на оправе в вырезе, причем, по меньшей мере, что-то одно из внешнего выступа или поверхности на оправе является наклонным, чтобы вынуждать плунжер поворачиваться при поступательном перемещении, причем, внутренний продольный выступ, соединенный с футляром, выступает внутрь в продольный вырез таким образом, чтобы не допускать отцепления внешнего выступа от поверхности на оправе до поступательного перемещения оправы для выдвижения иглы, и, причем, внешний выступ освобождается от внутреннего продольного выступа, при поступательном перемещении оправы для выдвижения иглы, чтобы повернуться за пределы проксимального конца внутреннего продольного выступа вследствие его наклонного зацепления с оправой под действием приводной пружины.
Внутренний продольный выступ может быть расположен на второй втулке, расположенной в футляре и первоначально зафиксированной к футляру для совместного аксиального поступательного перемещения, при этом, вторая втулка является частью механизма управления отведением шприца, причем, механизм управления отведением шприца выполнен с возможностью расцепления с футляром и зацепления с оправой, когда футляр перемещают в дистальном направлении после того, как оправа поступательно перемещена для выдвижения иглы, причем, устанавливающая пружина расположена в футляре вокруг оправы, и устанавливающая пружина действует своим дистальным концом на вторую втулку, чтобы поджимать футляр или оправу в дистальном направлении. Проксимальный конец устанавливающей пружины может действовать на первую втулку.
Автоматический инъектор может дополнительно содержать:
- трубчатый корпус, телескопически вдвигаемый в трубчатый футляр, при этом, оправа расположена с возможностью сдвига относительно корпуса,
- кнопку спуска, расположенную дистально или сбоку в или на футляре,
- механизм управления введением иглы, содержащий первую втулку для соединения проксимального конца устанавливающей пружины либо с оправой для ее продвижения для введения иглы, либо с корпусом для отведения иглы, в зависимости от относительного аксиального положения оправы и корпуса,
- фиксирующий механизм, предназначенный для соединения корпуса с оправой для совместного аксиального поступательного перемещения относительно футляра, причем, фиксирующий механизм выполнен с возможностью отсоединения корпуса от оправы, при приведении в действие кнопки спуска, с предоставлением, тем самым, оправе возможности перемещаться относительно корпуса, чтобы вынудить механизм управления введением иглы переключить проксимальный конец устанавливающей пружины на оправу, для введения иглы.
Подузел оправы с встроенной приводной пружиной допускает применение сильной приводной пружины, без какого-либо воздействия на пользователя при запуске автоматического инъектора или во время введения иглы, так как данные действия выполняются или встречают сопротивление устанавливающей пружины, которую можно задать значительно слабее приводной пружины. Данное решение позволяет вводить высоковязкие лекарственные средства.
Разделение функций между приводной пружиной и устанавливающей пружиной вышеописанным образом обеспечивает ряд существенных преимуществ. Автоматический инъектор, при всех обстоятельствах, обеспечивает защиту от укола иглой, т.е. иглу можно отвести перед тем, как инъекция завершается. Надежность автоматического инъектора повышается, так как компоненты для выдвижения и отведения иглы не испытывают воздействия сильного удара свободно расширяющейся мощной приводной пружины. Автоматический инъектор очень полезен для применения в качестве базовой системы, так как приводную пружину можно заменять для введения лекарств разной вязкости, без ущерба для функций введения или отведения. Данное свойство особенно полезно с высоковязкими текучими средами.
Автоматический инъектор содержит, в частности, малое число частей по сравнению с наиболее распространенными автоматическими инъекторами, что уменьшает стоимость производства. Компоновка с отдельными устанавливающей пружиной и приводной пружиной для инъекции текучей среды допускает применение одной конструкции для жидкостей с разными вязкостями только посредством смены приводной пружины и для разных объемов только посредством изменения длины плунжера. Данная возможность является преимуществом над традиционными конструкциями, в которых основная пружина служит также источником усилия для введения и/или отведения иглы.
В контексте настоящего описания принято считать, что корпус, в общем, зафиксирован в его положении, и поэтому движение других компонентов описано относительно корпуса, если не оговаривается иное.
В исходном состоянии поставки автоматического инъектора, проксимальный конец устанавливающей пружины соединен с корпусом посредством механизма управления введением иглы, а дистальный конец соединен с футляром посредством механизма управления отведением шприца, деблокирование приводной пружины не допускается механизмом деблокирования плунжера, разъединение корпуса с оправой не допускается фиксирующим механизмом.
Для запуска инъекции, автоматический инъектор необходимо прижать к месту инъекции, например, коже пациента. Пользователь, например, пациент или медицинский работник, захватывает футляр всей ладонью и прижимает корпус, выступающий из проксимального конца, к месту инъекции.
При нажиме на место инъекции, футляр поступательно перемещается в проксимальном направлении относительно корпуса против усилия устанавливающей пружины. Когда футляр, по меньшей мере, почти пришел в выдвинутое положение, фиксирующий механизм деблокируется и, тем самым, допускает поступательное перемещение оправы относительно корпуса.
С данного момента, оправу можно поступательно перемещать, предпочтительно, вручную, нажатием на кнопку спуска, проталкивающую оправу в проксимальном направлении. Оправа поступательно перемещается в проксимальном направлении относительно футляра и корпуса и, тем самым, переключает механизм управления введением иглы, в зависимости от относительного положения оправы в корпусе, для того, чтобы отсоединить проксимальный конец устанавливающей пружины от корпуса и соединить упомянутый конец с оправой, и, тем самым, деблокировать устанавливающую пружину для продвижения оправы для введения иглы.
В альтернативном варианте, устанавливающая пружина может быть первоначально соединена с оправой посредством механизма управления введением иглы таким образом, что оправа будет немедленно продвигаться, когда фиксирующий механизм деблокируется поступательным перемещением футляра в выдвинутое положение.
Когда игла, сдвигаемая вместе с подузлом оправы, по меньшей мере, почти достигает глубины инъекции, приводная пружина деблокируется механизмом деблокирования плунжера, что дает возможность приводной пружине продвинуть вперед плунжер и пробку-поршень для, по меньшей мере, частичного введения лекарственного средства. В предпочтительном варианте, деблокирование приводной пружины запускается достижением оправой предварительно заданного относительного положения внутри футляра.
Если автоматический инъектор удаляют с места инъекции после того, как пробка-поршень достигла нижнего предела в шприце или середины инъекции, то футляр сдвигается в дистальном направлении под действием устанавливающей пружины относительно подузла оправы.
Когда футляр приходит в заданное положение относительно оправы во время упомянутого движения, проксимальный конец устанавливающей пружины отсоединяется от оправы и соединяется с корпусом посредством механизма управления введением иглы. Кроме того, дистальный конец устанавливающей пружины отсоединяется от гильзы спуска и соединяется с оправой посредством механизма управления отведением шприца.
Так как устанавливающая пружина теперь нажимает на корпус в проксимальном направлении и на оправу в дистальном направлении, то подузел оправы отводится устанавливающей пружиной в корпус в безопасное положение иглы.
В соответствии с одним вариантом осуществления, механизм управления введением иглы может содержать первую втулку, поджатую устанавливающей пружиной в проксимальном направлении, при этом, на первой втулке проксимально расположена, по меньшей мере, одна упругая консоль, причем, в оправе и корпусе расположены соответствующие выемки, причем, поперечная протяженность наконечника упругой консоли шире, чем зазор между оправой и корпусом, что вынуждает наконечник упругой консоли упираться в дистальную поверхность выемки в корпусе, с блокированием, в данном состоянии, от отклонения в направлении внутрь посредством оправы, или упираться в дистальную поверхность выемки в оправе, с блокированием, в данном состоянии, от отклонения в направлении наружу посредством корпуса и с передачей, тем самым, нагрузки от устанавливающей пружины на оправу для введения иглы, причем, упругая консоль выполнена с возможностью переключения между корпусом и оправой посредством наклонного зацепления наконечника с дистальными поверхностями под действием устанавливающей пружины, в зависимости от продольного положения корпуса относительно оправы. Так как наконечник упругой консоли может быть наклонным внутри и снаружи, то его можно назвать стреловидным наконечником.
Фиксирующий механизм может быть выполнен с возможностью обеспечения силы противодействия, которую требуется преодолевать для продвижения оправы в проксимальном направлении для введения иглы. Как только пользователь прикладывает к кнопке спуска усилие, которое превосходит предварительно заданную величину, фиксирующий механизм деблокируется и, тем самым, запускает цикл инъекции. Если предварительно заданная величина не превышается, то фиксирующий механизм отталкивает оправу и кнопку спуска обратно в их прежнее положение. Данная особенность гарантирует, что автоматический инъектор всегда находится в определенном состоянии либо запуска, либо отсутствия запуска, а не в состоянии запуска наполовину из-за нерешительности пользователя.
Фиксирующий механизм может быть также выполнен с возможностью обеспечения силы противодействия, оказывающей сопротивление поступательному перемещению оправы в дистальном направлении относительно корпуса, для удерживания оправы в определенном положении в переходном состоянии, в котором, оба конца устанавливающей пружины отсоединены от оправы. Упомянутое переходное состояние может быть необходимо для отведения иглы, при удалении с места инъекции. Поскольку оправа поджимается к месту инъекции устанавливающей пружиной перед удалением с места инъекции, оправа должна быть отсоединена от проксимального конца устанавливающей пружины и соединена с дистальным концом для отведения. Последовательность данного переключения очень важна, так как отведение не исполнится, если оба конца устанавливающей пружины присоединены к оправе одновременно. Данная проблема решается разделением переключения концов посредством значительного смещения футляра, который перемещается в дистальном направлении относительно корпуса, при удалении с места инъекции, под действием устанавливающей пружины. Поскольку переключение дистального конца устанавливающей пружины на оправу зависит от положения футляра относительно оправы, то оправа должна быть зафиксирована в переходном состоянии, что обеспечивается фиксирующим механизмом.
В одном варианте осуществления, фиксирующий механизм содержит упругую консоль на корпусе и ромбовидный скошенный элемент на оправе, при этом, упругая консоль является, по существу, прямолинейной в ненапряженном состоянии и имеет первый наконечник консоли, выполненный с возможностью взаимодействия в наклонном зацеплении с проксимальной четвертой наклонной поверхностью или дистальной пятой наклонной поверхностью на ромбовидном скошенном элементе таким образом, что приложение к оправе сдвигающего усилия относительно корпуса в проксимальном направлении, при зацеплении первого наконечника консоли с четвертой наклонной поверхностью, отклоняет упругую консоль в одном поперечном направлении, например, наружу, когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли, превышена, чтобы позволить первому наконечнику консоли передвигаться вдоль одной поперечной стороны ромбовидного скошенного элемента, при непрерывном относительном поступательном перемещении компонентов. Наконечник консоли может выступать поперечно из упругой консоли таким образом, чтобы выгибать упругую консоль посредством рычажного действия при нажиме на ромбовидный скошенный элемент, что также определяет предварительно заданную величину сдвигающего усилия, подлежащего преодолению оправой. Кроме того, контактирующие поверхности первого наконечника консоли и ромбовидного скошенного элемента могут характеризоваться трением, подобранным для задания требуемого усилия посредством подходящего выбора формы и свойств материала упомянутых поверхностей. Упругая консоль получает возможность перехода в ненапряженное состояние, как только первый наконечник консоли достигает пятой наклонной поверхности и, тем самым, входит с ней в зацепление таким образом, что приложение сдвигающего усилия к оправе в дистальном направлении отклоняет упругую консоль в другом поперечном направлении, например, внутрь, когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли, превышена, чтобы позволить первому наконечнику консоли передвигаться вдоль другой поперечной стороны ромбовидного скошенного элемента, при непрерывном поступательном перемещении оправы. Первый наконечник консоли может также получать возможность перехода в ненапряженное состояние позади четвертой наклонной поверхности в конце данного движения, для блокирования повторного продвижения оправы, например, когда автоматический инъектор сильно встряхивают после использования.
Разумеется, положения упругой консоли на корпусе и ромбовидного скошенного элемента на оправе можно переключать без изменения функции фиксирующего механизма.
Когда автоматический инъектор или шприц собирают, на игле можно закрепить защитную трубку для иглы, чтобы сохранить стерильность иглы и предотвратить как повреждение иглы во время сборки, так и манипуляции и доступ пользователя к игле для исключения уколов пальцев острием. Снятие защитной трубки для иглы перед инъекцией, обычно, требует относительно большого усилия для стягивания защитной трубки для иглы с иглы и втулки иглы в проксимальном направлении. Для обеспечения защиты иглы перед инъекцией и предотвращения обнажения иглы необходимо исключить поступательное перемещение шприца в проксимальном направлении в результате действия упомянутого усилия. С данной целью, футляр может быть выполнен с возможностью блокирования фиксирующего механизма до его поступательного перемещения в проксимальном направлении относительно корпуса, когда корпус прижимают к месту инъекции, чтобы исключить поступательное перемещение оправы. Данная задача может быть решена с помощью выступа в футляре, предотвращающего отклонение упругой консоли фиксирующего механизма посредством ее подпора снаружи. Поступательное перемещение футляра в выдвинутое положение в проксимальном направлении, при контакте с местом инъекции, организовано с возможностью деблокирования фиксирующего механизма для приведения его в действие. Данная задача может быть решена с помощью выступа, перемещающегося вместе с футляром так, чтобы больше не подпирать снаружи упругую консоль фиксирующего механизма. Для обеспечения требования, чтобы футляр не перемещался в проксимальном направлении и, тем самым, не деблокировал фиксирующий механизм прежде, чем снимают защитную трубку для иглы, на проксимальном конце футляра может быть закреплен колпачок, чтобы сделать корпус недоступным, пока колпачок не снят. В предпочтительном варианте, колпачок сцеплен с защитной трубкой для иглы посредством зубца таким образом, чтобы снимать защитную трубку для иглы, когда колпачок стягивают с автоматического инъектора. Для облегчения снятия колпачка, колпачок может иметь профилированную поверхность, сопрягающуюся с поверхностью на футляре таким образом, что колпачок стягивают при вращении. Зубец может быть соединен с колпачком с возможностью их независимого поворота для исключения действия вращательного момента на защитную трубку для иглы, когда колпачок поворачивают, чтобы не деформировать иглу внутри защитной трубки для иглы.
В одном варианте осуществления, футляр выполнен с возможностью блокировки фиксирующего механизма до поступательного перемещения в проксимальном направлении относительно корпуса, при этом, футляр выполнен с возможностью, при поступательном перемещении в выдвинутое положение в проксимальном направлении, деблокирования фиксирующего механизма, с приведением его в действие.
В одном варианте осуществления, дистально расположенная кнопка спуска, по меньшей мере, в исходном состоянии соединена с оправой, при этом, футляр выполнен с возможностью упора в кнопку спуска в исходном состоянии, не допускающем нажатия кнопки спуска, причем, при поступательном перемещении футляра в выдвинутое положение относительно корпуса, кнопка спуска остается соединенной с оправой и, поэтому, выступает из футляра, чтобы предоставить возможность нажатия для начала цикла инъекции.
Дистально расположенная кнопка спуска может быть, по меньшей мере, в исходном состоянии соединена с оправой, при этом, футляр выполнен с возможностью упора в кнопку пуска в исходном состоянии, не допускающем нажатия кнопки пуска. При поступательном перемещении футляра в выдвинутое положение, когда корпус прижимают к месту инъекции, кнопка спуска остается соединенной с оправой и, поэтому, выступает из футляра, который переместился относительно корпуса, оправы и кнопки спуска, чтобы предоставить возможность нажатия кнопки спуска для начала цикла инъекции. Таким образом, последовательность действий для приведения в действие автоматического инъектора задается, сначала, прижатием автоматического инъектора к месту инъекции и, затем, нажатием кнопки спуска. Данная последовательность уменьшает риск укола пальцев острием, в частности, если пользователь ошибся в том, какой конец автоматического инъектора приложить к своей коже. Без данной последовательности пользователь рискует ввести иглу в свой большой палец, что значительно менее вероятно при принудительной последовательности.
Вторая втулка может содержать упругую проксимальную консоль со вторым наконечником консоли, содержащим внутренний выступ. Второй наконечник консоли выполнен с возможностью нахождения в наклонном зацеплении со вторым упором футляра в футляре таким образом, который приводит к сдвигу второго наконечника консоли по наклонной плоскости в направлении внутрь под действием устанавливающей пружины в дистальном направлении. Внутренний выступ выполнен с возможностью внутреннего упора в оправу для предотвращения отклонения внутрь второго наконечника консоли и удерживания второй втулки в состоянии фиксации к футляру. В оправе расположена третья выемка для предоставления внутреннему выступу возможности отклониться внутрь во время поступательного перемещения футляра в дистальном направлении относительно оправы, при удалении автоматического инъектора с места инъекции.
В альтернативном варианте осуществления, первая втулка и/или вторая втулка могут быть вкручены на резьбе в один из компонентов, для соединения которых с устанавливающей пружиной предназначены упомянутые втулки, при этом, футляр должен быть выполнен с возможностью блокирования резьбовых соединений от разъединения в некоторых относительных продольных положениях и, в то же время, с возможностью обеспечения вывертывания втулки из резьбового зацепления в других относительных продольных положениях, чтобы допускать переключение втулок на соответствующий другой компонент, подлежащий соединению с устанавливающей пружиной.
В альтернативном варианте осуществления, кнопка спуска может быть расположена дистально, при этом, футляр выполнен в виде закрытого гильзового спускового элемента, имеющего закрытый дистальный торец, перекрывающий кнопку спуска. В исходном состоянии, между дистальным торцом гильзового спускового элемента и кнопкой спуска обеспечен зазор, допускающий некоторое перемещение гильзового спускового элемента в проксимальном направлении против поджимающего усилия устанавливающей пружины, в первой фазе, перед упором в кнопку спуска. Как только гильзовый спусковой элемент приходит в контакт с кнопкой спуска, кнопка спуска испытывает нажим гильзового спускового элемента, при дальнейшем поступательном перемещении во второй фазе. Данный вариант осуществления позволяет оставить большинство компонентов автоматического инъектора, при этом, только описанные конструктивные элементы нуждаются в модификации, позволяющей привести базовое устройство в соответствие с конкретными требованиями. Автоматический инъектор с гильзовым спусковым элементом особенно полезен для людей с нарушениями двигательных функций, так как, в отличие от традиционных автоматических инъекторов, запуск не требует действий с небольшими кнопками одними пальцами. Вместо этого, используют всю ладонь.
Для отведения иглы требуется, чтобы пользователь поднял автоматический инъектор достаточно далеко от места инъекции, чтобы предоставить футляру или гильзовому спусковому элементу возможность сдвинуться обратно в дистальном направлении для переключения устанавливающей пружины. Поскольку пользователю, возможно, нелегко узнать, завершена ли инъекция или нет, то может быть обеспечен деблокируемый компонент для создания шума, способный, после деблокирования, формировать звуковой и/или тактильный сигнал обратной связи для пользователя, при этом, компонент для создания шума выполнен с возможностью деблокирования, когда плунжер приходит относительно шприца в положение, в котором пробка-поршень расположена вблизи проксимального конца шприца, т.е. когда инъекция, по меньшей мере, почти завершена. В таком случае, деблокированный компонент для создания шума наталкивается на вмещающий компонент, например, футляр, гильзовый спусковой элемент или кнопку спуска, что указывает на окончание инъекции. Удар о непосредственно доступный компонент обеспечивает высокую ощутимость шума и непосредственный доступ к руке или пальцу пользователя для формирования тактильной обратной связи. В предпочтительном варианте, компонент для создания шума может натолкнуться на кнопку спуска, которая может быть выполнена в форме барабана для обеспечения громкого шума.
В предпочтительном варианте, глубина введения иглы задается оправой относительно корпуса, а не футляра, поэтому, если пользователь вздрагивает или не удерживает автоматический инъектор плотно прижатым к месту инъекции, то в дистальном направлении переместится только футляр, а глубина инъекции остается постоянной. Пока данное перемещение футляра не превышает установленного расстояния, футляр еще не переключает устанавливающую пружину для отведения иглы.
Автоматический инъектор может быть приведен в действие при выполнении нескольких основных механических операций:
- Футляр продвигают относительно корпуса и, тем самым, сжимают устанавливающую пружину, что дает пользователю ощущение нажима гильзы смыкания с кожей. Все остальные компоненты остаются на том же месте во время продвижения футляра, приводящего к выступанию кнопки спуска из дистального конца футляра.
- Пользователь нажимает на кнопку спуска, которой можно манипулировать в текущем состоянии. Нажатие кнопки непосредственно перемещает оправу и, следовательно, приводной подузел в проксимальном направлении на установленное расстояние, пока устанавливающая пружина не принимает действие на себя через первую втулку и не вводит иглу в место инъекции.
- Кнопка спуска останавливается на дистальном конце футляра, когда оправа продолжает поступательное перемещение в проксимальном направлении. Движение оправы относительно кнопки спуска служит для деблокирования приводной пружины непосредственно перед достижением полной глубины введения, например, вытягиванием пальца на кнопке спуска из оправы, что дает возможность плунжеру перемещаться. Приводная пружина двигает плунжер вниз цилиндра шприца, с вытеснением лекарственного средства.
- Механизм испускания шума деблокируется, когда плунжер находится почти в конце хода, незадолго до того, как пробка-поршень достигает нижнего предела в шприце, что указывает пользователю на окончание инъекции.
- Игла остается полностью введенной, пока пользователь не перемещает футляр обратно на установленное расстояние, после чего вторая втулка отсоединяется от футляра и соединяется с оправой, а первая втулка отсоединяется от оправы и соединяется с корпусом, что дает возможность устанавливающей пружине отвести оправу и, следовательно, иглу.
В предпочтительном варианте, автоматический инъектор можно применять для подкожной или внутримышечной инъекции, в частности, для введения чего-то одного из анальгетика, антикоагулянта, инсулина, производного инсулина, гепарина, ловенокса, вакцины, гормона роста, пептидного гормона, белка, антител и комплексных углеводов.
Термин «лекарственное средство», в контексте настоящего описания, означает фармацевтический состав, содержащий, по меньшей мере, одно фармацевтически активное соединение,
при этом, в одном варианте осуществления, фармацевтически активное соединение имеет молекулярную массу до 1500 Да и/или является пептидом, белком, полисахаридом, вакциной, ДНК, РНК, антителом, ферментом, гормоном или олигонуклеотидом, или смесью вышеупомянутых фармацевтически активных соединений,
причем, в дополнительном варианте осуществления, фармацевтически активное соединение пригодно для лечения и/или профилактики сахарного диабета или осложнений, сопутствующих сахарному диабету, например диабетической ретинопатии, тромбоэмболитических болезней, например, тромбоэмболии глубоких вен или легочной тромбоэмболии, острого коронарного синдрома (ACS), ангины, инфаркта миокарда, рака, дегенерации желтого пятна, воспаления, поллиноза, атеросклероза и/или ревматоидного артрита,
причем, в дополнительном варианте осуществления, фармацевтически активное соединение содержит, по меньшей мере, один пептид для лечения и/или профилактики сахарного диабета или осложнений, сопутствующих сахарному диабету, например диабетической ретинопатии,
причем, в дополнительном варианте осуществления, фармацевтически активное соединение содержит, по меньшей мере, один человеческий инсулин или аналог или производное человеческого инсулина, глюкагоноподобный пептид (GLP-1) или его аналог или производное, или экзендин-3 или экзендин-4, или аналог или производное экзендина-3 или экзендина-4.
Аналогами инсулина являются, например, Gly(A21), Arg(B31), Arg(B32) человеческий инсулин; Lys(B3), Glu(B29) человеческий инсулин; Lys(B28), Pro(B29) человеческий инсулин; Asp(B28) человеческий инсулин; человеческий инсулин, в котором пролин в позиции B28 заменен на Asp, Lys, Leu, Val или Ala, и в котором, в позиции B29, Lys может быть заменен на Pro; Ala(B26) человеческий инсулин; Des(B28-B30) человеческий инсулин; Des(B27) человеческий инсулин и Des(B30) человеческий инсулин.
Производными инсулина являются, например, B29-N-миристоил-des(B30) человеческий инсулин; B29-N-пальмитоил-des(B30) человеческий инсулин; B29-N-миристоил человеческий инсулин; B29-N-пальмитоил человеческий инсулин; B28-N-миристоил LysB28ProB29 человеческий инсулин; B28-N-пальмитоил-LysB28ProB29 человеческий инсулин; B30-N-миристоил-ThrB29LysB30 человеческий инсулин; B30-N-пальмитоил-ThrB29LysB30 человеческий инсулин; B29-N-(N-пальмитоил-Y-глютамил)-des(B30) человеческий инсулин; B29-N-(N-литохолил-Y-глютамил)-des(B30) человеческий инсулин; Β29-Ν-(ω-карбоксигептадеканоил)-des(B30) человеческий инсулин и B29-N-(-карбоксигептадеканоил) человеческий инсулин.
Экзендин-4, например, означает экзендин-4(1-39), пептид последовательности H-His-Gly-Glu-Gly-Thr-Phe-Thr-Ser-Asp-Leu-Ser-Lys-Gln-Met-Glu-Glu-Glu-Ala-Val-Arg-Leu-Phe-lle-Glu-Trp-Leu-Lys-Asn-Gly-Gly-Pro-Ser-Ser-Gly-Ala-Pro-Pro-Pro-Ser-NH2.
Производные экзендина-4 выбирают, например, из следующего списка соединений:
H-(Lys)4-des Pro36, des Pro37 экзендин-4(1-39)-NH2,
H-(Lys)5-des Pro36, des Pro37 экзендин-4(1-39)-NH2,
des Pro36 [Asp28] экзендин-4(1-39),
des Pro36 [lsoAsp28] экзендин-4(1-39),
des Pro36 [Met(O)14, Asp28] экзендин-4(1-39),
des Pro36 [Met(O)14, lsoAsp28] экзендин-4(1-39),
des Pro36 [Trp(O2)25, Asp28] экзендин-4(1-39),
des Pro36 [Trp(O2)25, lsoAsp28] экзендин-4(1-39),
des Pro36 [Met(O)14 Trp(O2)25, Asp28] экзендин-4(1-39),
des Pro36 [Met(O)14 Trp(O2)25, lsoAsp28] экзендин-4(1-39); или
des Pro36 [Asp28] экзендин-4(1-39),
des Pro36 [lsoAsp28] экзендин-4(1-39),
des Pro36 [Met(O)14, Asp28] экзендин-4(1-39),
des Pro36 [Met(O)14, lsoAsp28] экзендин-4(1-39),
des Pro36 [Trp(O2)25, Asp28] экзендин-4(1-39),
des Pro36 [Trp(O2)25, lsoAsp28] экзендин-4(1-39),
des Pro36 [Met(O)14 Trp(O2)25, Asp28] экзендин-4(1-39),
des Pro36 [Met(O)14 Trp(O2)25, lsoAsp28] экзендин-4(1-39),
при этом, группа -Lys6-NH2 может быть связана с C-концом (карбоксильным концом) производного экзендина-4;
или производной экзендина-4 последовательности
H-(Lys)6-des Pro36 [Asp28] экзендин-4(1-39)-Lys6-NH2,
des Asp28 Pro36, Pro37, Pro38 экзендин-4(1-39)-NH2,
H-(Lys)6-des Pro36, Pro38 [Asp28] экзендин-4(1-39)-NH2,
H-Asn-(Glu)5des Pro36, Pro37, Pro38 [Asp28] экзендин-4(1-39)-NH2,
des Pro36, Pro37, Pro38 [Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-Asn-(Glu)5-des Pro36, Pro37, Pro38 [Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-des Pro36 [Trp(O2)25, Asp28] экзендин-4(1-39)-Lys6-NH2,
H-des Asp28 Pro36, Pro37, Pro38 [Trp(O2)25] экзендин-4(1-39)-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] экзендин-4(1-39)-NH2,
H-Asn-(Glu)5-des Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] экзендин-4(1-39)-NH2,
des Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-Asn-(Glu)5-des Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-des Pro36 [Met(O)14, Asp28] экзендин-4(1-39)-Lys6-NH2,
des Met(O)14 Asp28 Pro36, Pro37, Pro38 экзендин-4(1-39)-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Met(O)14, Asp28] экзендин-4(1-39)-NH2,
H-Asn-(Glu)5-des Pro36, Pro37, Pro38 [Met(O)14, Asp28] экзендин-4(1-39)-NH2,
des Pro36, Pro37, Pro38 [Met(O)14, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Met(O)14, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-Asn-(Glu)5 des Pro36, Pro37, Pro38 [Met(O)14, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-Lys6-des Pro36 [Met(O)14, Trp(O2)25, Asp28] экзендин-4(1-39)-Lys6-NH2,
H-des Asp28 Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25] экзендин-4(1-39)-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Met(O)14, Asp28] экзендин-4(1-39)-NH2,
H-Asn-(Glu)5-des Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] экзендин-4(1-39)-NH2,
des Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] экзендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-des Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] экзендин-4(S1-39)-(Lys)6-NH2,
H-Asn-(Glu)5-des Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] экзендин-4(1-39)-(Lys)6-NH2;
или фармацевтически приемлемой(ого) соли или сольвата любого из вышеупомянутых производных экзендина-4.
Гормонами являются, например, гормоны гипофиза или гормоны гипоталамуса, или регуляторные пептиды и их антагонисты, перечисленные в документе Rote Liste, ed. 2008, Chapter 50, например, гонадотропин (фоллитропин, лутропин, хориогонадотропин, метотропин), соматропин (соматропин), десмопрессин, терлипрессин, гонадорелин, трипторелин, лейпрорелин, бусерелин, нафарелин, госерелин.
Полисахаридом является, например, гликозаминогликан, гиалуроновая кислота, гепарин, низкомолекулярный гепарин или ультранизкомолекулярный гепарин или их производная, или сульфированная, например, полисульфированная форма вышеупомянутых полисахаридов, и/или их фармацевтически приемлемая соль. Примером фармацевтически приемлемой соли полисульфированного низкомолекулярного гепарина является эноксапарин натрий.
Фармацевтически приемлемыми солями являются, например, кислотно-аддитивные соли и основные соли. Кислотно-аддитивными солями являются, например, соли HCI или HBr. Основными солями являются, например, соли, содержащие катион, выбранный из основания или щелочи, например, Na+ или K+, или Ca2+, или ион аммония N+(R1)(R2)(R3)(R4), где R1-R4, независимо друг от друга, означают: водород, по желанию, замещенную C1-C6-алкильную группу, по желанию, замещенную C2-C6-алкенильную группу, по желанию, замещенную C6-C10-арильную группу или, по желанию, замещенную C6-C10-гетероарильную группу. Дополнительные примеры фармацевтически приемлемых солей описаны в «Remington's Pharmaceutical Sciences» 17. ed. Alfonso R. Gennaro (Ed.), Mark Publishing Company, Easton, Pa., U.S.A., 1985 и в Encyclopedia of Pharmaceutical Technology (Энциклопедия фармацевтических технологий).
Фармацевтически приемлемые сольваты являются, например, гидратами.
Приводная пружина и устанавливающая пружина могут быть пружинами сжатия. Однако, данные пружины могут быть также любым средством накопления энергии, например, торсионными пружинами, пневматическими пружинами и т.п.
Дополнительная область применения настоящего изобретения будет очевидна из нижеприведенного подробного описания. Однако, следует понимать, что подробное описание и конкретные примеры, показывающие предпочтительные варианты осуществления изобретения, приведены только для иллюстрации, поскольку, из приведенного подробного описания, специалистами в данной области техники будут обнаружены различные изменения и модификации в пределах существа и объема изобретения.
Краткое описание чертежей
Настоящее изобретение будет понятнее из нижеприведенного подробного описания и прилагаемых чертежей, которые приведены только для иллюстрации и, следовательно, не ограничивают настоящего изобретения, и на которых:
Фигура 1 - два продольных разреза автоматического инъектора в разных плоскостях разреза в состоянии до использования,
Фигура 2 - два продольных разреза автоматического инъектора после снятия колпачка и защитной трубки для иглы,
Фигура 3 - два продольных разреза автоматического инъектора с проксимальным концом, прижатым к месту инъекции,
Фигура 4 - два продольных разреза автоматического инъектора с нажатой кнопкой спуска,
Фигура 5 - два продольных разреза автоматического инъектора во время введения иглы в место инъекции,
Фигура 6 - два продольных разреза автоматического инъектора с полностью введенной иглой,
Фигура 7 - два продольных разреза автоматического инъектора во время инъекции вблизи окончания дозы,
Фигура 8 - два продольных разреза автоматического инъектора в конце дозы,
Фигура 9 - два продольных разреза автоматического инъектора, удаленного с места инъекции,
Фигура 10 - два продольных разреза автоматического инъектора с иглой, отведенной в безопасное положение иглы,
Фигура 11 - схематичные виды фиксирующего механизма для управления перемещением оправы относительно корпуса автоматического инъектора в четырех разных состояниях,
Фигура 12 - схематичные виды механизма управления введением иглы для управления перемещением первой втулки в шести разных состояниях,
Фигура 13 - схематичные виды механизма управления отведением шприца в трех разных состояниях,
Фигура 14 - схематичные виды механизма испускания шума для звуковой индикации окончания инъекции в трех разных состояниях,
Фигура 15 - схематичные виды механизма деблокирования плунжера в трех разных состояниях,
Фигура 16 - схематичные виды механизма деблокирования кнопки в трех разных состояниях,
Фигура 17 - изометрическое изображение альтернативного варианта осуществления механизма деблокирования плунжера,
Фигура 18 - продольный разрез альтернативного варианта осуществления механизма деблокирования кнопки,
Фигура 19 - продольные разрезы альтернативного варианта осуществления фиксирующего механизма,
Фигура 20 - продольный разрез третьего варианта осуществления фиксирующего механизма,
Фигура 21 - продольный разрез альтернативного варианта осуществления механизма испускания шума,
Фигура 22 - продольные разрезы альтернативного варианта осуществления механизма управления введением иглы, выполненного также с возможностью выполнения функции фиксирующего механизма при отведении иглы и введении иглы,
Фигура 23 - изометрическое изображение механизма управления введением иглы, показанного на фигуре 22,
Фигура 24 - продольные разрезы третьего варианта осуществления механизма управления введением иглы, выполненного также с возможностью выполнения функций фиксирующего механизма,
Фигура 25 - изометрическое изображение механизма управления введением иглы, показанного на фигуре 24,
Фигура 26 - продольные разрезы третьего варианта осуществления механизма испускания шума, и
Фигура 27 - другой вариант осуществления автоматического инъектора, содержащего закрытый гильзовый спусковой элемент вместо кнопки спуска.
Соответствующие части обозначены одинаковыми позициями на всех фигурах.
Подробное описание предпочтительных вариантов осуществления
Наклонное зацепление в соответствии с терминологией настоящего описания является зацеплением между двумя компонентами, из которых, по меньшей мере, один имеет наклонную поверхность для зацепления с другим компонентом таким образом, что один из компонентов отгибается в сторону, когда компоненты аксиально надвигают один на другой, при условии, что упомянутый компонент не заблокирован от отгибания в сторону.
На фигурах 1a и 1b приведены два продольных разреза автоматического инъектора 1 в разных плоскостях разреза, при этом, разные плоскости разреза повернуты под углом, приблизительно, 90° одна относительно другой, и автоматический инъектор 1 находится в исходном состоянии перед началом инъекции. Автоматический инъектор 1 содержит корпус 2. В дальнейшем, корпус 2 считается, в общем, зафиксированным на месте, и поэтому движение других компонентов описано относительно корпуса 2. Шприц 3, например, шприц Hypak, с полой инъекционной иглой 4 расположен в проксимальной части автоматического инъектора 1. Когда автоматический инъектор 1 или шприц 3 собран, на игле 4 закреплена защитная трубка 5 для иглы. Пробка-поршень 6 расположена для герметизации шприца 3 с дистальной стороны и для вытеснения жидкого лекарственного средства M через полую иглу 4. Шприц 3 вмещен в трубчатую оправу 7 и удерживается в данной оправе на ее проксимальном конце. Оправа 7 расположена с возможностью сдвига в корпусе 2.
Приводная пружина 8 в форме пружины сжатия расположена в дистальной части оправы 7. Плунжер 9 служит для передачи усилия приводной пружины 8 на пробку-поршень 6.
Приводная пружина 8 заложена с напряжением между дистальным торцом 10 оправы 7 и упорным торцом 11, расположенным дистально на плунжере 9.
Оправа 7 является основным элементом, вмещающим шприц 3, приводную пружину 8 и плунжер 9, которые являются компонентами, необходимыми для выталкивания лекарственного средства M из шприца 3. Поэтому, упомянутые компоненты можно назвать приводным подузлом.
Корпус 2 и оправа 7 расположены внутри трубчатого футляра 12. Кнопка 13 спуска расположена на дистальном конце футляра 12. В механизме 27 деблокирования плунжера, из дистального торца кнопки 13 спуска выступает палец 14 в проксимальном направлении P между двумя упругими лапками 15, начинающимися от дистального торца 10 оправы, и, тем самым, не дает упомянутым лапкам сгибаться в направлении одна к другой в исходном состоянии A, показанном на фигуре 15A. На фигуре 15A показана только одна из упругих лапок 15 для иллюстрации принципа. Снаружи, упругие лапки 15 захвачены в соответствующие первые выемки 16 в дистальной гильзе 17 плунжера, прикрепленной дистально к упорному торцу 11 и расположенной внутри приводной пружины 8. Зацепление упругих лапок 15 в первых выемках 16 не допускает аксиального поступательного перемещения плунжера 9 относительно оправы 7. Упругие лапки 15 снабжены наклонной поверхностью для сгибания их внутрь при перемещении плунжера 9 относительно оправы 7 под действием приводной пружины 8, при этом, упомянутое сгибание заблокировано пальцем 14 в исходном состоянии A.
Оправа 7 зафиксирована к корпусу 2 для предотвращения относительного поступательного перемещения посредством фиксирующего механизма 18, подробно изображенного на фигурах 11A-11D.
Кнопка 13 спуска первоначально сцеплена с футляром 12 посредством механизма 26 деблокирования кнопки и не может быть нажата. Механизм 26 деблокирования кнопки подробно изображен на фигурах 16A-16C. Как показано на фигуре 16A, механизм 26 деблокирования кнопки содержит упругую проксимальную консоль 13.1 на кнопке 13 спуска, при этом, проксимальная консоль 13.1 содержит обращенную наружу первую наклонную поверхность 13.2 и обращенную внутрь вторую наклонную поверхность 13.3. В первоначальном состоянии A, изображенном на фигуре 16A, обращенная наружу первая наклонная поверхность 13.2 находится в зацеплении в наклонном первом упоре 12.1 футляра, блокирующем выдвижение кнопки 13 спуска из дистального конца D. Кнопка 13 спуска с проксимальной стороны упирается как в футляр 12, так и в оправу 7, что препятствует нажатию кнопки в проксимальном направлении P.
Как показано на фигурах 1A и 1B, устанавливающая пружина 19 в форме другой пружины сжатия расположена вокруг оправы 7 и действует между проксимальной первой втулкой 20 и дистальной второй втулкой 21. Устанавливающая пружина 19 служит для перемещения оправы 7 и, следовательно, приводного подузла в проксимальном направлении P для введения иглы или в дистальном направлении D для отведения иглы.
В поставленном состоянии, показанном на фигурах 1a и 1b, к проксимальному концу футляра 12 прикреплен колпачок 22, и защитная трубка 5 для иглы все еще находится на своем месте поверх иглы 4 и втулки иглы. Внутренняя гильза 22.1 колпачка 22 расположена внутри корпуса 2 и поверх защитной трубки 5 для иглы. Во внутренней гильзе 22.1 закреплен зубец 23. Зубец 23 сцеплен с защитной трубкой 5 для иглы для совместного аксиального поступательного перемещения.
Последовательность приведения в действие автоматического инъектора 1 описана ниже:
Пользователь снимает колпачок 22 с проксимального конца футляра 12. Зубец 23 соединяет защитную трубку 5 для иглы с колпачком 22. Следовательно, защитная трубка 5 для иглы также снимается при снятии колпачка 22. На фигурах 2a и 2b показан автоматический инъектор 1 после съема колпачка 22 и защитной трубки 5 для иглы. Оправа 7 и шприц 3 заблокированы от перемещения в проксимальном направлении P фиксирующим механизмом 18, находящимся в состоянии A, как показано на фигуре 11A. Как показано на фигуре 11A, фиксирующий механизм 18 содержит упругую консоль 2.1 на корпусе 2, с выступающим внутрь первым наконечником 2.2 консоли. Первый наконечник 2.2 консоли имеет проксимальную третью наклонную поверхность 2.3. Фиксирующий механизм 18 дополнительно содержит ромбовидный скошенный элемент 7.1 на оправе 7, имеющий проксимальную четвертую наклонную поверхность 7.2 и дистальную пятую наклонную поверхность 7.3. В состоянии A, скругленная дистальная сторона первого наконечника 2.2 консоли упирается в скошенный элемент 7.1 в дистальном направлении D и, тем самым, препятствует перемещению оправы 7 в проксимальном направлении P относительно корпуса 2. На футляре 12 обеспечен выступ для предотвращения отгибания упругой консоли 2.1 наружу и, тем самым, для предотвращения движения оправы 7 относительно корпуса 2.
Как показано на фигурах 2A и 2B, пользователь захватывает футляр 12 и помещает корпус 2, выступающий из футляра 12 на проксимальном конце P, на место инъекции, например, кожу пациента. По мере того, как автоматический инъектор 1 прижимают к месту инъекции, футляр 12 поступательно перемещается в проксимальном направлении P относительно корпуса 2 в выдвинутое положение, как показано на фигурах 3A и 3B. Вторая втулка 21 зафиксирована к футляру 12 и перемещается вместе с футляром 12 относительно корпуса 2 и относительно почти всех прочих компонентов автоматического инъектора 1 и, следовательно, несильно прижимает устанавливающую пружину 19 к первой втулке 20, которая заблокирована от перемещения в проксимальном направлении P корпусом 2 в результате действия механизма 24 управления введением иглы, находящегося в состоянии A, подробно изображенном на фигуре 12A. Как показано на фигуре 12A, на первой втулке 20 проксимально расположен упругий элемент в форме стреловидного наконечника 20.1. Первая втулка 20 со стреловидным наконечником 20.1 подталкивается в проксимальном направлении P силовым воздействием сжимаемой устанавливающей пружины 19. Обращенная наружу шестая наклонная поверхность 20.2 на стреловидном наконечнике 20.1 взаимодействует с обращенной внутрь дистальной седьмой наклонной поверхностью 2.4 на корпусе 2, вынуждающей стреловидный наконечник 20.1 смещаться по наклонной поверхности в направлении I внутрь, чему препятствует внутренний упор стреловидного наконечника 20.1 в оправу 7. Следовательно, первая втулка 20 не может поступательно перемещаться в проксимальном направлении P.
Как показано на фигурах 3A и 3B, вторая втулка 21 зафиксирована к футляру под действием механизма 25 управления отведением шприца, находящегося в состоянии A, подробно изображенном на фигуре 13A. Как показано на фигуре 13A, механизм 25 управления отведением шприца содержит упругую проксимальную консоль 21.1 на второй втулке 21, при этом, проксимальная консоль 21.1 содержит второй наконечник 21.2 консоли, содержащий внутренний выступ 21.3 и дистальную, обращенную наружу восьмую наклонную поверхность 21.4. Дистальная, обращенная наружу восьмая наклонная поверхность 21.4 находится в зацеплении в наклонном втором упоре 12.2 футляра таким образом, что вынуждает второй наконечник 21.2 консоли к смещению по наклонной плоскости в направлении I внутрь, когда на вторую втулку 21 действует усилие устанавливающей пружины 19 в дистальном направлении D, что блокируется внутренним упором внутреннего выступа 21.3 в оправу 7.
Как показано на фигурах 3A и 3B, если пользователь должен отодвинуть футляр 12 от места инъекции, то устанавливающая пружина 19 расширяется и, тем самым, возвращает автоматический инъектор 1 в исходное состояние после съема колпачка 22, как показано на фигурах 2A и 2B.
В состоянии, показанном на фигурах 3A и 3B, оправа 7 продолжает оставаться блокированной от перемещения в проксимальном направлении P посредством фиксирующего механизма 18, однако, при нахождении футляра 12 в его выдвинутом положении, фиксирующий механизм 18 деблокируется, как только выступ на футляре 12 также переместится и больше не препятствует отклонению упругой консоли 2.1 наружу. Перемещение футляра 12 относительно оправы 7, которая зафиксирована к корпусу 2 фиксирующим механизмом 18, вынуждает механизм 26 деблокирования кнопки переключиться в состояние B, показанное на фигуре 16B. Кнопка 13 спуска не может поступательно перемещаться вместе с футляром 12 в проксимальном направлении P, так как она упирается в оправу 7. Наклонная поверхность на первом упоре 12.1 футляра взаимодействует с обращенной наружу первой наклонной поверхностью 13.2 на проксимальной консоли 13.1 на кнопке 13 спуска, с результирующим отклонением проксимальной консоли 13.1 в направлении I внутрь и, тем самым, с зацеплением обращенной внутрь второй наклонной поверхности 13.3 на проксимальной консоли 13.1 в наклонном упоре 7.4 оправы, расположенном в оправе 7. По мере того, как футляр 12 сдвигается дальше в проксимальном направлении P, он подпирает проксимальную консоль 13.1 снаружи, с фиксацией, тем самым, кнопки 13 спуска к оправе 7. При этом, кнопка 13 спуска выступает из дистального конца D футляра 12 и готова к нажатию.
В состоянии, показанном на фигурах 3A и 3B, пользователь нажимает на кнопку 13 спуска в проксимальном направлении P. Когда кнопка 13 спуска упирается в оправу 7, оправа 7 нажимает в проксимальном направлении P на корпус 2, при этом, оправа 7 и корпус 2 взаимодействуют в фиксирующем механизме 18. Усилие, оказываемое пользователем, нажимающим кнопку 13 спуска, действует через корпус 2 на место инъекции, а не между кнопкой 13 спуска и футляром 12. Фиксирующий механизм 18 обеспечивает силу противодействия, когда пользователь нажимает кнопку 13 спуска. После того, как пользователь прикладывает усилие, которое превосходит предварительно заданную величину, фиксирующий механизм 18 деблокируется и, тем самым, запускает цикл инъекции. Как показано на фигуре 11B, изображающей фиксирующий механизм 18 в состоянии B, упругая консоль 2.1 на корпусе 2 начинает сгибаться под действием ромбовидного скошенного элемента 7.1 на оправе 7 и, тем самым, накапливать упругую энергию. Несмотря на проксимальную четвертую наклонную поверхность 7.2 на скошенном элементе 7.1, трение между контактирующими поверхностями первого наконечника 2.2 консоли и проксимальной четвертой наклонной поверхностью 7.2 препятствует перемещению первого наконечника 2.2 консоли в направлении O наружу, пока разгибающее усилие в упруго деформированной консоли 2.1 не станет достаточно большим для преодоления трения. В данный момент, упругая консоль 2.1 отклоняется в направлении O наружу и выходит из пути оправы 7, что дает возможность оправе 7 сдвигаться в проксимальном направлении P. Когда оправа 7 проходит достаточно далеко в проксимальном направлении P, ромбовидный скошенный элемент 7.1 на оправе 7 проходит под первым наконечником 2.2 консоли и, тем самым, дает ему возможность сбросить напряжение и переместиться обратно в направлении I внутрь дистально сзади ромбовидного скошенного элемента 7.1 в состоянии C, изображенном на фигуре 11C, со сдерживанием, при этом, поступательного перемещения оправы 7 в дистальном направлении D относительно корпуса 2.
После того, как оправа 7 сдвигается достаточно далеко в проксимальном направлении P относительно первой втулки 20, механизм 24 управления введением иглы переключается в состояние B, как показано на фигуре 12B. На фигуре 12B, оправа 7 уже сдвинута в проксимальном направлении P таким образом, что стреловидный наконечник 20.1 на первой втулке 20 больше не имеет внутренней опоры. Данное состояние можно обеспечить посредством второй выемки 7.5 в оправе 7. При этом, стреловидный наконечник 20.1 отклоняется в направлении I внутрь во вторую выемку 7.5 под действием устанавливающей пружины 19, с приходом в состоянии C, показанное на фигуре 12C. В данном состоянии, первая втулка 20 расцеплена с корпусом 2. Взамен, стреловидный наконечник 20.1 сцепляет первую втулку 20 с оправой 7 посредством обращенной внутрь девятой наклонной поверхности 20.3, входящей в зацепление с дистальной десятой наклонной поверхностью 7.6 на оправе 7, на проксимальном конце второй выемки 7.5. В результате, с данного момента устанавливающая пружина 19 продолжает перемещать оправу 7 в проксимальном направлении P. По мере того, как пользователь выдвигает иглу 4 на часть ее хода, устанавливающая пружина 19 принимает на себя введение до того, как игла 4 выступит из проксимального конца P. Поэтому пользователь чувствует нажатие на кнопку, а не ручное введение иглы.
Фиксирующий механизм 18 действует с расчетом на приложение усилия пользователем, а не на смещение. После того, как прикладываемое усилие превосходит усилие, необходимое для переключения упора, пользователь выполнит полный нажим кнопки 13 спуска и, тем самым, обеспечит, чтобы первая втулка 20 переключилась во всех обстоятельствах. Если пользователь не проходит упора, то кнопка 13 спуска возвращается в ее неиспользованное состояние готовности к использованию, как показано на фигурах 3A и 3B. Приведенная особенность исключает приход автоматического инъектора 1 в неопределенное состояние.
На фигурах 4A и 4B изображен автоматический инъектор 1 с кнопкой 13 спуска, нажатой достаточно для того, чтобы устанавливающая пружина 19 вошла в соединение с оправой 7 и продолжила перемещение оправы 7 вперед, но еще без упора в футляр 12.
Оправа 7, соединенная с первой втулкой 20, поступательно перемещается в проксимальном направлении P под действием устанавливающей пружины 19. Так как шприц 3 расположен для совместного аксиального поступательного перемещения с оправой 7, то шприц 3 и игла 4 также сдвигаются, что приводит к тому, что игла 4 выступает из проксимального конца P и вводится в место инъекции. Кнопка 13 спуска возвращается в ее исходное положение относительно футляра 12 и фиксируется обратно к футляру 12 от оправы 7, как в состоянии A на фигуре 16A. Оправа 7 поступательно перемещается дальше в проксимальном направлении P и, тем самым, препятствует отгибанию внутрь проксимальной консоли 13.1, вследствие чего обращенная наружу первая наклонная поверхность 13.2 не может выйти из зацепления с первым упором 12.1 футляра.
Непосредственно перед достижением иглой 4 полной глубины введения, как показано на фигурах 5A и 5B, палец 14 на кнопке 13 спуска полностью вытягивается из положения между упругими лапками 15 на оправе 7. В результате, механизм 27 деблокирования плунжера приходит в состояние B, показанное на фигуре 15B, при этом, упругие лапки 15 больше не опираются внутри на палец 14. Вследствие наклонного зацепления упругих лапок 15 в первой выемке 16, они отклоняются в направлении I внутрь под действием приводной пружины 8 и, тем самым, приходят в состояние B, показанное на фигуре 15C. В результате, плунжер 9 расцепляется с оправой 7 и приводится в движение в проксимальном направлении P приводной пружиной 8, в готовности выполнить инъекцию лекарственного средства M. Усилие вытягивания пальца 14 из положения между упругими лапками 15 обеспечивается устанавливающей пружиной 19, а усилие, необходимое для отклонения упругих лапок 15 из зацепления с плунжером 9, обеспечивается приводной пружиной 8.
В то время, как плунжер 9 перемещается и смыкает зазор относительно пробки-поршня 6, перемещение оправы 7 в проксимальном направлении P завершается устанавливающей пружиной 19, нажимающей на первую втулку 20. По мере того, как оправа 7 перемещается относительно корпуса 2 во время введения иглы, механизм 24 введения иглы приходит в состояние D, показанное на фигуре 12D. Стреловидный наконечник 20.1 переместился вместе с оправой 7 и, по-прежнему, удерживается в положении отклонения внутрь корпусом 2, препятствующим, тем самым, расцеплению первой втулки 20 с оправой 7. Стреловидный наконечник 20.1 должен быть в состоянии отклониться в направлении O наружу, чтобы допустить отведение, которое поясняется ниже. Чтобы обеспечить возможность отклонения наружу, стреловидный наконечник 20.1 передвигается проксимально за пределы части корпуса 2, показанной на фигурах 12A-12F, после выреза 2.5 в корпусе 2. Однако, пока футляр 12 удерживается прижатым к месту инъекции и не имеет возможности вернуться в дистальном направлении D дальше предварительно заданного расстояния под действием устанавливающей пружины 19, стреловидный наконечник 20.1 будет удерживаться от отклонения в направлении O наружу первым выступом 12.3 на футляре 12 (не показанном на фигурах 12A-F, смотри фигуры 5A-8A) в течение, приблизительно, второй половины его движения для введения иглы.
В данный момент игла 4 полностью введена в место инъекции, как показано на фигурах 6A и 6B. Интервал времени между нажатием кнопки 13 спуска и полным введением иглы 4 является очень коротким, однако, за это время выполняется несколько механических операций. Глубина введения иглы определяется движением оправы 7 относительно корпуса 2, а не относительно футляра 12, поэтому, если пользователь дрогнет или не удержит автоматический инъектор 1 плотно прижатым к коже, в дистальном направлении D переместится только футляр 12, а глубина инъекции останется постоянной.
Как только плунжер 9 сомкнет зазор с пробкой-поршнем 6 под действием усилия приводной пружины 8, пробка-поршень 6 проталкивается в проксимальном направлении P внутри шприца 3 и, тем самым, вытесняет лекарственное средство M через иглу 4 в место инъекции.
Непосредственно перед окончанием инъекции пробкой-поршнем 6, почти достигшей нижнего предела в шприце 3, как показано на фигурах 7A и 7B, компонент 28 для создания шума деблокируется. Сложение допусков, в основном, на шприц 3, требует, чтобы шум всегда испускался перед окончанием инъекции. Иначе, при некотором сочетании частей, шум будет испускаться не всегда. Компонент 28 для создания шума, содержит удлиненный участок 28.1, расположенный внутри дистальной гильзы 17 плунжера, и дистальную торцовую пластину 28.2, расположенную между дистальным торцом 10 оправы и торцом кнопки 13 спуска. Две вторых упругих лапки 30 начинаются из дистального торца 10 оправы и продолжаются в проксимальном направлении P. Пружина 29 для создания шума расположена с возможностью поджима компонента 28 для создания шума в дистальном направлении D относительно оправы 7 посредством опоры с проксимальной стороны на выступ на вторых упругих лапках 30 и с дистальной стороны на компонент 28 для создания шума (не показано).
Примечание: компонент 28 для создания шума не показан на фигурах 16A, B и C для ясности, поскольку он не влияет на функционирование механизма 26 деблокирования кнопки. Механизм 31 испускания шума для деблокирования компонента 28 для создания шума схематично изображен на фигурах 14A, 14B и 14C. Как показано на фигуре 14A, механизм 31 испускания шума содержит вторые упругие лапки 30. На каждой второй упругой лапке 30 расположен наклонный внутренний выступ 30.1, который находится в зацеплении с соответствующей обращенной наружу одиннадцатой наклонной поверхностью 28.3 на удлиненном участке 28.1 компонента 28 для создания шума таким образом, что вторая упругая лапка 30 отклоняется в направлении O наружу под действием нагрузки пружины 29 для создания шума. В исходном состоянии A механизма 31 испускания шума, вторые упругие лапки 30 заблокированы от отклонения наружу посредством внешней опоры на дистальную гильзу 17 плунжера и, тем самым, препятствуют поступательному перемещению компонента 28 для создания шума относительно оправы 7. Механизм 31 испускания шума остается в состоянии A до момента непосредственно перед окончанием инъекции, когда пробка-поршень 6 почти достигла нижнего предела в шприце 3, как показано на фигурах 7A и 7B. В данный момент плунжер 9 уже сдвинут в проксимальном направлении P относительно оправы 7 настолько, что вторые упругие лапки 30 больше не опираются на дистальную гильзу 17 плунжера. В результате, механизм 31 испускания шума пришел в состояние B, показанное на фигуре 14B. Вследствие наклонного зацепления между наклонным внутренним выступом 30.1 и обращенной наружу одиннадцатой наклонной поверхностью 28.3, вторая упругая лапка 30 отклоняется наружу под действием пружины 29 для создания шума, с отцеплением, тем самым, компонента 28 для создания шума от оправы 7 и предоставлением компоненту 28 для создания шума возможности перемещения в дистальном направлении D под действием пружины 29 для создания шума в состояние C, показанное на фигуре 14C. Следовательно, компонент 28 для создания шума ускоряется в дистальном направлении D, и дистальная торцовая пластина 28.2 наталкивается на внутреннюю поверхность кнопки 13 спуска, с выдачей пользователю, тем самым, звукового и тактильного сигнала обратной связи о том, что инъекция почти закончена.
На фигурах 8A и 8B представлен автоматический инъектор 1 с пробкой-поршнем 6, почти достигшей нижнего предела в шприце 3.
Как упоминалось выше, пользователь может допустить перемещение футляра 12 на несколько миллиметров в дистальном направлении D под действием усилия устанавливающей пружины 19, без воздействия на положение иглы 4, пока упомянутое перемещение меньше предварительно заданного расстояния. Если пользователь намерен прекратить инъекцию в какой-то момент, то пользователь должен дать футляру 12 переместиться в дистальном направлении D за пределы упомянутого расстояния. На фигурах 9A и 9B изображен автоматический инъектор 1, приподнятый с места инъекции, с футляром 12, сдвинутым на все расстояние в дистальном направлении D, так что корпус 2 выступает из проксимального конца футляра 12. По мере того, как футляр 12 перемещается, первая втулка 20 освобождает оправу 7, и, затем, вторая втулка 21 разъединяется с футляром 12 и вытягивает оправу 7 в дистальном направлении D. Последовательность данного переключения очень важна, так как отведение не исполнится, если к оправе 7 присоединены обе втулки 20, 21 одновременно. Данная проблема решается разделением переключения втулок 20, 21 посредством значительного смещения футляра 12.
Переключение первой втулки 20 поясняется на фигурах 12E и F. Как показано на фигуре 12E, футляру 12 предоставлена возможность перемещаться в дистальном направлении D под действием устанавливающей пружины 19 в процессе удаления автоматического инъектора 1 с места инъекции. Первый выступ 12.3 (не показанный, смотри фигуру 9A) выведен из положения снаружи за стреловидным наконечником 20.1. Первая втулка 20 все еще испытывает нажим в проксимальном направлении P, производимый устанавливающей пружиной 19. Вследствие зацепления обращенной внутрь девятой наклонной поверхности 20.3 на стреловидном наконечнике 20.1 с дистальной десятой наклонной поверхностью 7.6 на оправе 7, стреловидный наконечник 20.1 отклоняется в направлении O наружу в вырез 2.5 корпуса 2 (показанный на фигурах 12A-12F), при этом, механизм 24 управления введением иглы приходит в состояние E, показанное на фигуре 12E, с отсоединением первой втулки 20 от оправы 7 и защелкиванием данной втулки в корпус 2.
По мере того, как футляр 12 перемещается дальше в дистальном направлении D, при удалении с места инъекции, механизм 25 управления отведением шприца переключается из его состояния A (смотри фигуру 13A) в состояние B, показанное на фигуре 13B. Футляр 12 и вторая втулка 21, зафиксированная к футляру 12, совместно перемещаются в дистальном направлении D, тогда как оправа 7 удерживается на месте фиксирующим механизмом 18 в ее состоянии C, описанном выше, (смотри фигуру 11C). В результате упомянутого перемещения, внутренний выступ 21.3 на втором наконечнике 21.2 консоли проксимальной консоли 21.1 на второй втулке 21 больше не упирается внутрь в оправу 7. Вместо этого, внутренний выступ 21.3 отклоняется в направлении I внутрь в третью выемку 7.7 в оправе 7 благодаря наклонному зацеплению второго наконечника 21.2 консоли в наклонном втором упоре 12.2 футляра, под действием устанавливающей пружины 19. В результате, механизм 25 управления отведением шприца приходит в состояние C, показанное на фигуре 13C, в котором вторая втулка 21 отсоединена от футляра 12 и присоединена к оправе 7. Фиксирующий механизм 18 прикладывает небольшое усилие, задерживающее перемещение оправы 7, прежде, чем механизм 25 управления отведением шприца переключается в состояние C, так как в данном случае действует небольшое сдвигающее усилие, прикладываемое второй втулкой 21, вытягивающей оправу 7 в дистальном направлении D, при поступательном перемещении футляра 12 в дистальном направлении D, когда механизм 24 управления введением иглы уже переключился в состояние E. Если оправа 7 перемещается слишком далеко в дистальном направлении D прежде, чем переключается вторая втулка 21, то футляр 12 заканчивает перемещение до того, как внутренний выступ 21.3 может отклониться в третью выемку 7.7, предотвращающую отведение.
Начиная с положения C фиксирующего механизма 18 (смотри фиг. 11C), оправа 7 и, следовательно, ромбовидный скошенный элемент 7.1 поступательно перемещаются в дистальном направлении D под действием устанавливающей пружины 19. В результате, дистальная пятая наклонная поверхность 7.3 ромбовидного скошенного элемента 7.1 входит в зацепление с проксимальной третьей наклонной поверхностью 2.3 на первом наконечнике 2.2 консоли упругой консоли 2.1 таким образом, что упругая консоль 2.1 отклоняется в направлении I внутрь. Данное зацепление создает небольшое усилие, задерживающее перемещение оправы 7, необходимое для обеспечения переключения второй втулки 21 на оправу 7. Упругая консоль 2.1 и ромбовидный скошенный элемент 7.1 смещаются в сторону для предоставления упругой консоли 2.1 возможности прохода без контакта с ромбовидным скошенным элементом 7.1, как только первый наконечник 2.2 консоли оказывается целиком внутри ромбовидного скошенного элемента 7.1 в состоянии D, показанном на фигуре 11D.
Устанавливающая пружина 19 закреплена на ее проксимальном конце в футляре посредством первой втулки 20, упирающейся в корпус 2. Дистальный конец устанавливающей пружины 19 перемещает вторую втулку 21 в дистальном направлении D, с захватом оправы 7 вместе с втулкой и, следовательно, шприца 3 с иглой 4 и с преодолением сопротивления фиксирующего механизма 18, как показано на фигуре 11D. Следует отметить, что игла 4 отводится из кожи автоматическим инъектором 1, как только пользователь предоставляет футляру 12 возможность сдвинуться достаточно далеко, в противоположность автоматическим инъекторам с защитными гильзами для иглы, которые требуют, чтобы пользователь удалял автоматический инъектор с места инъекции и, тем самым, самостоятельно вытягивал иглу из кожи для обеспечения выдвижения защитной гильзы для иглы.
Так как допустимое перемещение компонента 28 для создания шума относительно оправы 7 ограничено, то данный компонент больше не находится в контакте с кнопкой 13 спуска, которая переместилась в дистальном направлении D вместе с футляром 12, при удалении с места инъекции. Когда начинается удаление, пружина 29 для создания шума не обеспечивает никакого задерживающего усилия. После того, как компонент 28 для создания шума снова наталкивается на кнопку 13 спуска при отведении оправы 7, пружина 29 для создания шума должна повторно сжиматься, что ослабляет усилие, приводящее отведение в конечной части. Чтобы обеспечить надежное отведение, независимо от данного ослабляющего усилия, устанавливающая пружина 19 должна иметь подходящие размеры.
Отведение заканчивается, когда дистальная втулка 21 наталкивается на первый задний упор 12.4 на футляре 12, как на фигурах 10A и 10B. Стреловидный наконечник 20.1 на первой втулке 20 опирается внутри на оправу 7 в состоянии F, показанном на фигуре 12F, и, тем самым, заблокирован от отклонения в направлении I внутрь. Обращенная наружу шестая наклонная поверхность 20.2 стреловидного наконечника 20.1 входит в зацепление за первым выступом 12.3 на футляре 12 и, тем самым, блокирует футляр 12 от повторного продвижения в проксимальном направлении P. Между стреловидным наконечником 20.1 и первым выступом 12.3 может быть обеспечен зазор для учета допусков.
Фиксирующий механизм 18 возвращается в состояние A, показанное на фигуре 11A, с фиксацией, тем самым, оправы 7 на месте относительно корпуса 2, как данный механизм фиксировал оправу первоначально, однако, теперь оправу невозможно деблокировать, так как футляр 12 невозможно переместить относительно корпуса 2.
В данном состоянии, через индикаторное окно 32 в футляре 12 можно видеть язычок 20.4 на первой втулке 20, указывающий, что автоматический инъектор 1 уже использовали.
На фигуре 17 представлено изометрическое изображение альтернативного варианта осуществления механизма 27 деблокирования плунжера. Механизм 27 деблокирования плунжера предотвращает перемещение плунжера 9 в проксимальном направлении P относительно оправы 7, пока оправу 7 не перемещают в проксимальном направлении P для введения иглы. В отличие от механизма 27 деблокирования плунжера, показанного на фигуре 15, в котором относительное перемещение оправы 7 и кнопки 13 спуска служит для запуска деблокирования плунжера 9, альтернативный вариант осуществления, изображенный на фигуре 17, деблокирует плунжер 9 перемещением оправы 7 относительно второй втулки 21. На фигуре 17 изображен механизм 27 деблокирования плунжера перед деблокированием плунжера. Вторая втулка 21 изображена прозрачной для большей ясности. Плунжер 9 поджимается в проксимальном направлении P приводной пружиной 8. Чтобы плунжер 9 продвинулся вперед, он должен повернуться по двенадцатой наклонной поверхности 7.8 на оправе 7. На плунжере 9 расположен скошенный элемент 9.1 для зацепления с упомянутой двенадцатой наклонной поверхностью 7.8. Поворот скошенного элемента 9.1 заблокирован обращенным внутрь продольным выступом 21.5 на второй втулке 21, посаженным в продольный вырез 7.9 в оправе 7. Футляр 12 и вторая втулка 21 остаются в том же положении, т.е. связанными между собой для совместного аксиального поступательного перемещения. При нажатии кнопки 13 спуска, оправа 7 и плунжер 9, являющиеся частью приводного подузла, перемещаются в проксимальном направлении P, сначала пользователем, нажимающим кнопку 13 спуска и, затем, устанавливающей пружиной 19, принимающей на себя действие посредством первой втулки 20, как поясняется выше. Как только оправа 7 перемещается достаточно далеко в проксимальном направлении P относительно второй втулки 21, скошенный элемент 9.1 на плунжере 9 отходит от продольного выступа 21.5 на второй втулке 21 и может повернуться за пределы проксимального конца продольного выступа 21.5 благодаря его наклонному зацеплению с двенадцатой наклонной поверхностью 7.8 под действием приводной пружины 8. В результате, приводная пружина 8 продвигает вперед плунжер 9 в проксимальном направлении P для инъекции лекарственного средства M.
На фигуре 18 представлен продольный разрез альтернативного варианта осуществления механизма 26 деблокирования кнопки. В отличие от механизма 26 деблокирования кнопки, показанного на фигуре 16, на которой приведен вид кнопки 13 спуска, выдвигающейся при контакте с кожей в результате переключения нижней части кнопки 13 спуска между оправой 7 и футляром 12, механизм 26 деблокирования кнопки, показанный на фигуре 18, начинает из состояния с кнопкой спуска 13, фиксированной, но выступающей из дистального конца футляра 12. Как только оправа 7 переместится в дистальном направлении D при контакте корпуса 2 с кожей, можно нажать кнопку 13 спуска и привести в действие автоматический инъектор 1. При этом, обеспечивается упорядоченная работа.
В варианте осуществления, показанном на фигуре 18, кнопка 13 спуска содержит две проксимальных консоли 13.1, каждая из которых содержит наклонный, обращенный наружу выступ 13.4. В исходном состоянии, показанном на фигуре 18, наклонные, обращенные наружу выступы 13.4 находятся в зацеплении в соответствующих четвертых выемках 12.5 в футляре 12. Отцепление наклонных, обращенных наружу выступов 13.4 от четвертых выемок 12.5 заблокировано оправой 7, служащей внутренней опорой для проксимальных консолей 13.1 таким образом, чтобы удерживать проксимальные консоли 13.1 от отклонения внутрь. Внутренние выступы 13.5 на проксимальных консолях 13.1 упираются во второй выступ 7.10 на оправе 7 таким образом, что блокируют оправу 7 от дальнейшего перемещения в проксимальном направлении P в исходном состоянии. Как только, при контакте корпуса 2 с кожей, оправа 7 переместится в дистальном направлении D, первое окно 7.11 в оправе 7 перемещается за внутренний выступ 13.5, чтобы проксимальные консоли 13.1 могли отклониться внутрь вследствие их наклонного зацепления в четвертых выемках 12.5, во время нажатия кнопки 13 спуска. При этом, проксимальные консоли 13.1 опираются снаружи на футляр 12 и остаются в зацеплении с оправой 7 даже во время отведения иглы 4. Поэтому, кнопка 13 спуска не возвращается в ее исходное положение и, тем самым, указывает, что автоматический инъектор 1 уже использовали.
В предпочтительном варианте, механизм 26 деблокирования кнопки, показанный на фигуре 18, может быть объединен с механизмом 27 деблокирования плунжера, показанным на фигуре 17.
На фигурах 19A и 19B приведены два продольных разреза альтернативного варианта осуществления фиксирующего механизма 18. Фиксирующий механизм 18, показанный на фигурах 11A-11D, который можно назвать механизмом с «прямоугольным ходом», так как первый наконечник 2.2 консоли двигается вокруг ромбовидного скошенного элемента 7.1, выполняет несколько функций, которые управляют перемещением оправы 7 относительно корпуса 2. Альтернативный фиксирующий механизм 18, изображенный на фигурах 19A и 19B, использует три прижимных лапки 7.12, 7.13, 2.6 для такого же действия.
Первая прижимная лапка 7.12 расположена в виде обращенной наружу, поджатой упругой консоли на оправе 7, продолжающейся от оправы 7 в проксимальном направлении P. Первая прижимная лапка 7.12 выполнена с возможностью блокирования оправы 7 от перемещения в проксимальном направлении P до того, как нажимают на корпус 2, или, правильнее, футляр 12 поступательно перемещается при контакте с кожей. Первая прижимная лапка 7.12 состоит из двух рядом расположенных участков. Первый участок 7.14 предотвращает перемещение оправы 7 в проксимальном направлении P упором в корпус 2 в выемке. Второй участок 7.15 расположен в виде обращенного наружу, выступающего наконечника прижимной лапки, выполненного с возможностью сдвига внутрь по скошенному конструктивному элементу 12.6 футляра 12 для отцепления первой прижимной лапки 7.12, с отцеплением, тем самым, оправы 7 от корпуса 2, когда футляр 12 поступательно перемещается в проксимальном направлении P, при контакте с кожей. Продольный паз 2.7 в корпусе 2 предназначен для обеспечения сдвига второго участка 7.15 в проксимальном направлении, как только блокировка расцепляется. Небольшая сила трения между первой прижимной лапкой 7.12 и корпусом 2 обеспечивает задерживающее усилие, необходимое для обеспечения отведения.
Вторая прижимная лапка 7.13 расположена в виде упругой консоли на оправе 7, продолжающейся в дистальном направлении D и содержащей обращенный наружу, выступающий третий наконечник 7.16 консоли с проксимальной наклонной плоскостью. Третий наконечник 7.16 консоли служит задним упором в третий выступ 2.9 на корпусе 2 для предотвращения перемещения оправы 7 в дистальном направлении D из ее исходного положения. Оправа 7 и корпус 2 собирают со второй прижимной лапкой 7.13 в данном положении перед вставкой шприца 3 в оправу 7, что облегчается проксимальной наклонной плоскостью на третьем наконечнике 7.16 консоли. Шприц 3 фиксирует прижимную лапку на месте посредством предотвращения отклонения внутрь, с созданием, тем самым, неподвижного упора.
Третья прижимная лапка 2.6 является упругой консолью на корпусе 2, продолжающейся в дистальном направлении D. Наклонный четвертый наконечник 2.8 консоли на третьей прижимной лапке 2.6 выполнен с возможностью зацепления внутрь в пятой выемке 7.17 в оправе 7. Как только первая прижимная лапка 7.12 отцепляется, пользователь может подвергнуть нагрузке третью прижимную лапку 2.6 нажимом на оправу 7 в проксимальном направлении P, при нажатии кнопки 13 спуска. Третья прижимная лапка 2.6 подвергается нагрузке на сжатие, т.е. упомянутая лапка будет отгибаться наружу и резко освобождаться вследствие ее наклонного зацепления с оправой 7, что обеспечивает функцию упора, подобную той, которая поясняется на фигуре 11B.
На фигуре 20 приведен продольный разрез третьего варианта осуществления фиксирующего механизма 18, который является видоизменением варианта осуществления, показанного на фигурах 19A и 19B. В данном варианте осуществления, функция упора третьей прижимной лапки 2.6 придана первой прижимной лапке 7.12. Блокировка футляра 12 относительно оправы 7 разъединяется таким же образом, но упор обеспечивается посредством отклонения первой прижимной лапки 7.12 внутрь на второй уровень, что выполняется корпусом 2, не содержащим паза 2.7 для второго участка 7.15. Вместо этого, второй участок 7.15, сразу после отвода внутрь посредством скошенного конструктивного элемента 12.6 на футляре 12, должен быть дополнительно сдвинут внутрь наклонной поверхностью внутри корпуса 2 под действием аксиальной нагрузки между корпусом 2 и оправой 7, с резким разъединением их зацепления.
На фигуре 21 приведен продольный разрез альтернативного варианта осуществления механизма 31 испускания шума. В противоположность механизму 31 испускания шума, показанному на фигуре 14, в котором пружина 29 для создания шума действует между оправой 7 и компонентом 28 для создания шума, в варианте осуществления, изображенном на фигуре 21, пружина 29 для создания шума действует между футляром 12 и компонентом 28 для создания шума. Во время введения иглы, пружина 29 для создания шума сжимается по мере того, как компонент 28 для создания шума перемещается вместе с оправой 7 относительно футляра 12. Когда компонент 28 для создания шума освобождается плунжером 9 незадолго перед окончанием дозы, компонент 28 для создания шума перемещается в дистальном направлении D и наталкивается на кнопку 13 спуска. В отличие от конструкции на фигуре 14, пружина 29 для создания шума повторно не сжимается во время отведения иглы, так как данная пружина закреплена в футляре 12, а не в оправе 7.
На фигурах 22A и 22B приведены продольные разрезы альтернативного варианта осуществления механизма 24 управления введением иглы, который выполнен также с возможностью выполнения функции упора фиксирующего механизма 18 при отведении иглы и введении иглы. На фигуре 23 приведено соответствующее изометрическое изображение. Четвертая прижимная лапка 20.5 на первой втулке 20 расположена в виде упругой консоли с наконечником консоли, содержащим обращенную внутрь проксимальную тринадцатую наклонную поверхность 20.6 для зацепления за четвертый выступ 7.18 на оправе 7 и опирающимся снаружи на футляр 12, чтобы удерживать первую втулку 20 в зацеплении с оправой 7 перед использованием, во время введения иглы и во время инъекции. Когда пользователь приподнимает футляр 12 с места инъекции в конце инъекции, шестая выемка 12.7 в футляре 12 перемещается наружу за четвертую прижимную лапку 20.5 и, тем самым, позволяет четвертой прижимной лапке 20.5 выйти из зацепления, когда оправа 7 вытягивается в дистальном направлении D второй втулкой 21. Поскольку четвертую прижимную лапку 20.5 нужно отжимать наружу по наклонной плоскости, то требуется небольшое усилие для вывода четвертой прижимной лапки 20.5 из зацепления, что обеспечивает упор отведения.
Пятая прижимная лапка 2.10 на корпусе 2 упирается в блок 20.7 на первой втулке 20 перед использованием и, тем самым, блокирует первую втулку 20 и, следовательно, оправу 7, находящуюся в зацеплении с первой втулкой 20, от перемещения в проксимальном направлении P. Для деблокирования, пятую прижимную лапку 2.10 требуется отклонить наружу и выше блока 20.7. Отклонение наружу пятой прижимной лапки 2.10 первоначально блокируется футляром 12. Как только футляр 12 переместится при контакте с кожей, снаружи над пятой прижимной лапкой 2.10 появляется второе окно 12.8 в футляре 12, допускающее отклонение наружу. Затем, пятая прижимная лапка 2.10 отклоняется четырнадцатой наклонной поверхностью 7.19 на оправе 7, когда оправа 7 проталкивается в проксимальном направлении P при нажатии кнопки, так как четвертая прижимная лапка 20.5 допускает поступательное перемещение оправы 7 в проксимальном направлении P относительно первой втулки 20, но не наоборот. Упор для введения иглы обеспечивается необходимостью отклонения пятой прижимной лапки 2.10, когда она находится под действием устанавливающей пружины 19.
На фигурах 24A и 24B приведены продольные разрезы третьего варианта осуществления механизма 24 управления введением иглы, выполненного также с возможностью выполнения функций фиксирующего механизма 18. На фигуре 25 приведено изометрическое изображение механизма 24 управления введением иглы, показанного на фигуре 24. Вариант осуществления подобен варианту осуществления, изображенному на фигурах 22A, 22B и 23. Отличие состоит в том, что пятая прижимная лапка 2.10 расположена на первой втулке 20, и блок 20.7 расположен на корпусе 2, т.е. их положение поменялось местами, и поэтому на первой втулке 20 содержатся две прижимных лапки 2.10 и 20.5.
Четвертая прижимная лапка 20.5 идентична упомянутой лапке, показанной на фигуре 22B. Данная лапка удерживает первую втулку 20, соединенную с оправой 7, пока не запускается отведение иглы, что обеспечивает достижение и поддержку полной глубины инъекции, пока не начинается цикл отведения посредством отвода автоматического инъектора 1 от кожи.
Пятая прижимная лапка 2.10 обеспечивает упор для введения иглы и отцепляет первую втулку 20 от корпуса 2, что запускает введение иглы. Пятая прижимная лапка 2.10 блокирует первую втулку 20 и, следовательно, оправу 7, сцепленную с первой втулкой 20, от перемещения в проксимальном направлении P до использования, посредством упора в блок 20.7 на корпусе 2. Для деблокирования, пятая прижимная лапка 2.10 должна отклониться наружу и выше блока 20.7. Отклонение наружу пятой прижимной лапки 2.10 первоначально блокируется футляром 12. Как только футляр 12 переместится при контакте с кожей, снаружи от пятой прижимной лапки 2.10 появляется второе окно 12.8 в футляре 12, допускающее отклонение наружу. Затем, пятая прижимная лапка 2.10 отклоняется четырнадцатой наклонной поверхностью 7.19 на оправе 7, когда оправа 7 проталкивается в проксимальном направлении P при нажатии кнопки, так как четвертая прижимная лапка 20. допускает поступательное перемещение оправы 7 в проксимальном направлении P относительно первой втулки 20, но не наоборот. Упор для введения иглы обеспечивается необходимостью отклонения пятой прижимной лапки 2.10, когда она находится под действием устанавливающей пружины 19.
На фигурах 26A и 26B приведен продольный разрез третьего варианта осуществления механизма 31 испускания шума. Данный вариант осуществления работает без потребности в специальной пружине для создания шума. Плунжер 9 содержит проксимально наклонный выступ 9.2, выполненный с возможностью отклонения наружу двух седьмых прижимных лапок 7.21 на оправе 7 непосредственно перед окончанием дозы. Как только проксимально наклонный выступ 9.2 проходит за седьмые прижимные лапки 7.21, они резко защелкиваются обратно и наталкиваются на плунжер 9, с образованием, тем самым, звука. Трубчатая форма оправы 7 способствует передаче звука. На фигуре 26A изображен механизм 31 испускания шума перед испусканием звука. На фигуре 26B изображен механизм 31 испускания шума после испускания звука. Проксимальные торцы седьмых прижимных лапок 7.21 на оправе 7 аксиально смещены для облегчения сборки путем подъема седьмых прижимных лапок 7.21 одной за другой над дистальной стороной проксимально наклонного выступа 9.2.
На фигурах 27A и 27B приведены продольные разрезы другого варианта осуществления автоматического инъектора 1 в разных плоскостях разреза, при этом, разные плоскости разреза повернуты под углом, приблизительно, 90° одна относительно другой, и автоматический инъектор 1 находится в исходном состоянии перед началом инъекции. Автоматический инъектор 1, по существу, идентичен автоматическому инъектору, описанному со ссылками на фигуры 1-16. Однако, в отличие от автоматического инъектора, описанного со ссылками на фигуры 1-16, автоматический инъектор 1 в соответствии с данным вариантом осуществления содержит закрытый гильзовый спусковой элемент вместо кнопки спуска.
Закрытый гильзовый спусковой элемент 12 является таким же компонентом, как футляр 12, который имеет закрытый дистальный торец 12.10, отличающийся от торца, показанного на фигурах 1-16. Внутренняя кнопка 13 спуска расположена на дистальном конце внутри гильзового спускового элемента 12. В отличие от фигур 1-16, кнопка 13 спуска не видна и не выступает из футляра 12 ни в одном состоянии. В исходном состоянии, между дистальным торцом 12.10 гильзового спускового элемента 12 и внутренней кнопкой 13 спуска обеспечен зазор 33, допускающий некоторое перемещение гильзового спускового элемента 12, без столкновения с кнопкой 13 спуска.
Так как автоматический инъектор 1 в остальном не отличается от автоматического инъектора, представленного на фигурах 1-16, то он работает, по существу, аналогичным образом, со следующими исключениями:
Когда корпус 2 помещают на место инъекции, гильзовый спусковой элемент 12 поступательно перемещается в проксимальном направлении P относительно корпуса 2 в выдвинутое положение в первой фазе хода гильзы, выбирающего зазор 33 между дистальным торцом 12.10 гильзового спускового элемента 12 и внутренней кнопкой 13 спуска. Подобно тому, как в варианте осуществления, представленном на фигурах 1-16, данное перемещение деблокирует фиксирующий механизм 18 и кнопку 13 спуска. По мере того, как пользователь продолжает нажимать гильзовый спусковой элемент 12 во второй фазе хода гильзы и, тем самым, продвигает его дальше в проксимальном направлении P, дистальный торец 12.10 наталкивается на внутреннюю кнопку 13 спуска и, тем самым, нажимает упомянутую кнопку, пока первая втулка 20 не отцепляется от корпуса 2, и усилие устанавливающей пружины не передается на оправу 7. Затем оправа 7 продвигается вперед, пока внутренняя кнопка 13 спуска не задерживается на другом выступе в футляре 12, и механизм 27 деблокирования плунжера не освобождается (следует отметить, что в данном варианте осуществления палец 14 короче).
С точки зрения пользователя, фиксирующий механизм 18 выполнен с возможностью обеспечения силы противодействия, когда пользователь доходит до второй фазы хода гильзы. С данного момента, внутренняя конфигурация не отличается от варианта осуществления, представленного на фигурах 1-16.
Введение иглы запускается пользователем посредством полного выдвижения гильзового спускового элемента 12 во второй фазе хода гильзы и, тем самым, полного нажима внутренней кнопки 13 гильзы, с достигаемым, в результате, полным нажимом внутренней кнопки 13 спуска и преодолением сопротивления фиксирующего механизма, как в варианте осуществления, представленном на фигурах 1-16.
Когда устанавливающая пружина 19 принимает на себя работу, при нажатии кнопки, для полного выдвижения оправы 7 для введения иглы, внутренняя кнопка 13 спуска достигает нижнего предела на внутреннем пятом выступе 12.11 в гильзовом спусковом элементе 12, и внутренняя кнопка 13 спуска переключается обратно в положении фиксации к гильзовому спусковому элементу 12, как на фигуре 16C.
Вариант осуществления, показанный на фигурах 27A и 27B, может быть также объединен с альтернативными признаками, представленными на фигурах 17-26.
Разумеется, во всех наклонных зацеплениях между двумя компонентами, описанными в вышеприведенных вариантах осуществления, может быть всего одна наклонная поверхность на одном или другом компоненте, или могут быть наклонные поверхности на обоих компонентах, без существенного влияние на действие наклонного зацепления.
Список позиций
1 автоматический инъектор
2 корпус
2.1 упругая консоль
2.2 первый наконечник консоли
2.3 проксимальная третья наклонная поверхность
2.4 дистальная седьмая наклонная поверхность
2.5 вырез
2.6 третья прижимная лапка
2.7 паз
2.8 четвертый наконечник консоли
2.9 третий выступ
2.10 пятая прижимная лапка
2.11 шестая прижимная лапка
3 шприц
4 полая инъекционная игла
5 защитная трубка для иглы
6 пробка-поршень
7 оправа
7.1 скошенный элемент
7.2 проксимальная четвертая наклонная поверхность
7.3 дистальная пятая наклонная поверхность
7.4 упор оправы
7.5 вторая выемка
7.6 дистальная десятая наклонная поверхность
7.7 третья выемка
7.8 двенадцатая наклонная поверхность
7.9 продольный вырез
7.10 второй выступ
7.11 первое окно
7.12 первая прижимная лапка
7.13 вторая прижимная лапка
7.14 первый участок
7.15 второй участок
7.16 третий наконечник консоли
7.17 пятая выемка
7.18 четвертый выступ
7.19 четырнадцатая наклонная поверхность
7.20 пятнадцатая наклонная поверхность
7.21 седьмая прижимная лапка
8 приводная пружина
9 плунжер
9.1 скошенный элемент
9.2 проксимально наклонный выступ
10 торец оправы
11 упорный торец
12 футляр
12.1 первый упор футляра
12.2 второй упор футляра
12.3 первый выступ
12.4 первый задний упор
12.5 четвертая выемка
12.6 скошенный конструктивный элемент
12.7 шестая выемка
12.8 второе окно
12.9 третье окно
12.10 дистальный торец
12.11 пятый выступ
13 кнопка спуска
13.1 проксимальная консоль
13.2 обращенная наружу первая наклонная поверхность
13.3 обращенная внутрь вторая наклонная поверхность
13.4 наклонный, обращенный наружу выступ
13.5 внутренний выступ
13.6 второй задний упор
14 палец
15 упругая лапка
16 первая выемка
17 дистальная гильза плунжера
18 фиксирующий механизм
19 устанавливающая пружина
20 первая втулка
20.1 стреловидный наконечник
20.2 обращенная наружу шестая наклонная поверхность
20.3 обращенная внутрь девятая наклонная поверхность
20.4 язычок
20.5 четвертая прижимная лапка
20.6 обращенная внутрь проксимальная тринадцатая наклонная поверхность
20.7 блок
20.8 пятая прижимная лапка
21 вторая втулка
21.1 проксимальная консоль
21.2 второй наконечник консоли
21.3 внутренний выступ
21.4 дистальная, обращенная наружу восьмая наклонная поверхность
21.5 продольный выступ
22 колпачок
22.1 внутренняя гильза
23 зубец
24 механизм управления введением иглы
25 механизм управления отведением шприца
26 механизм деблокирования кнопки
27 механизм деблокирования плунжера
28 компонент для создания шума
28.1 удлиненный участок
28.2 дистальная торцовая пластина
28.3 обращенная наружу одиннадцатая наклонная поверхность
29 пружина для создания шума
30 вторая упругая лапка
30.1 наклонный внутренний выступ
31 механизм испускания шума
32 индикаторное окно
33 зазор
D дистальный конец, дистальное направление
I направление внутрь
M лекарственное средство
0 направление наружу
P проксимальный конец, проксимальное направление.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607529C2 |
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607939C2 |
| АВТОМАТИЧЕСКИЙ ИНЪЕКТОР | 2012 |
|
RU2607926C2 |
| АВТОИНЪЕКТОР | 2012 |
|
RU2620353C2 |
| АВТОИНЪЕКТОР | 2012 |
|
RU2579619C2 |
| АВТОИНЪЕКТОР | 2012 |
|
RU2621118C2 |
| АВТОИНЪЕКТОР | 2012 |
|
RU2585157C2 |
| АВТОИНЪЕКТОР | 2012 |
|
RU2582872C2 |
| СТОПОРНЫЙ МЕХАНИЗМ ДЛЯ УСТРОЙСТВА ДОСТАВКИ МЕДИКАМЕНТА | 2013 |
|
RU2637173C2 |
| УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2010 |
|
RU2552019C2 |
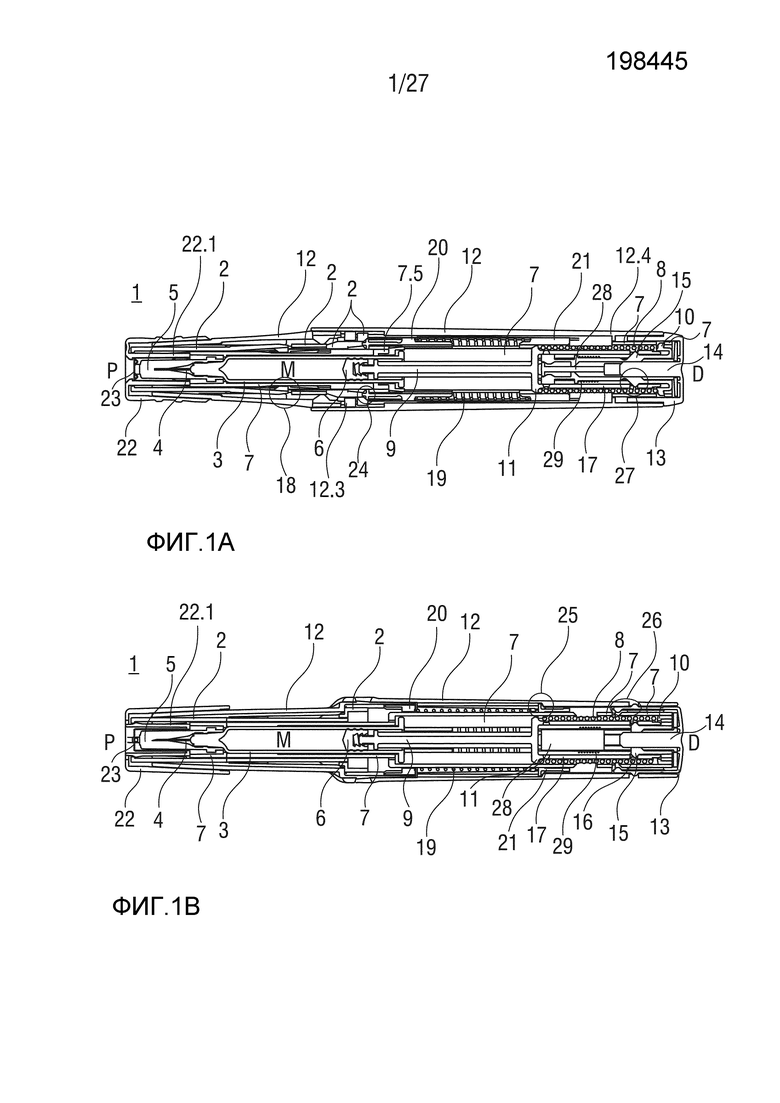
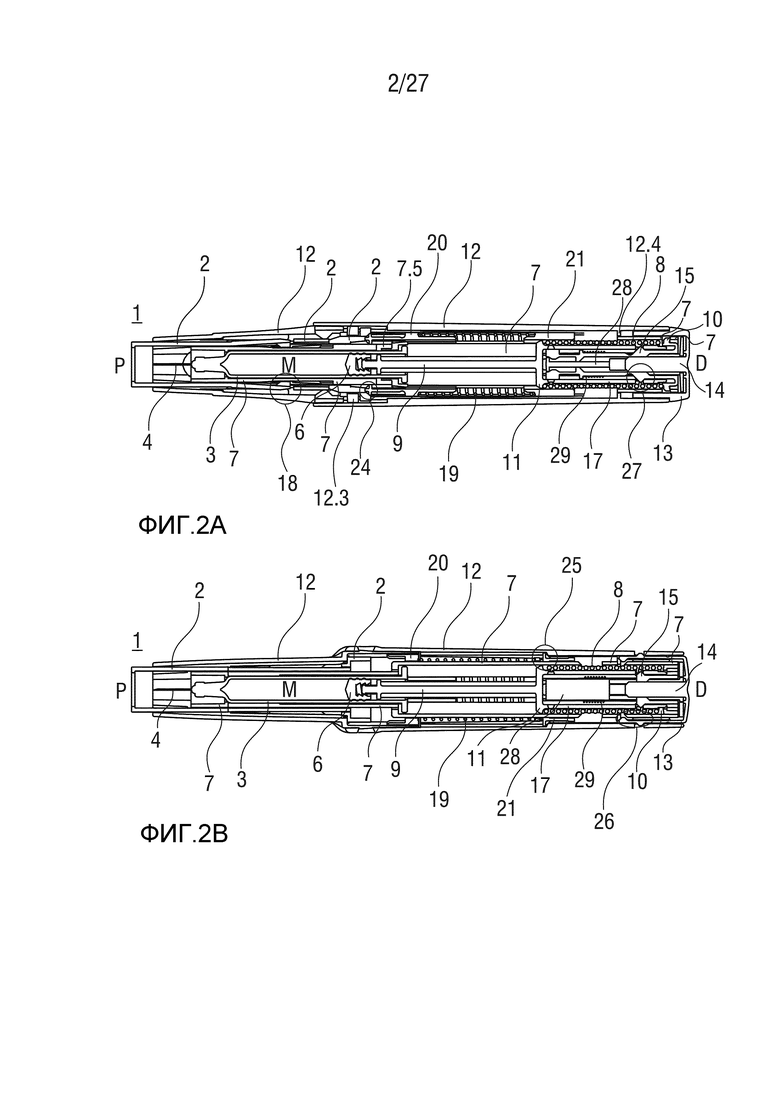
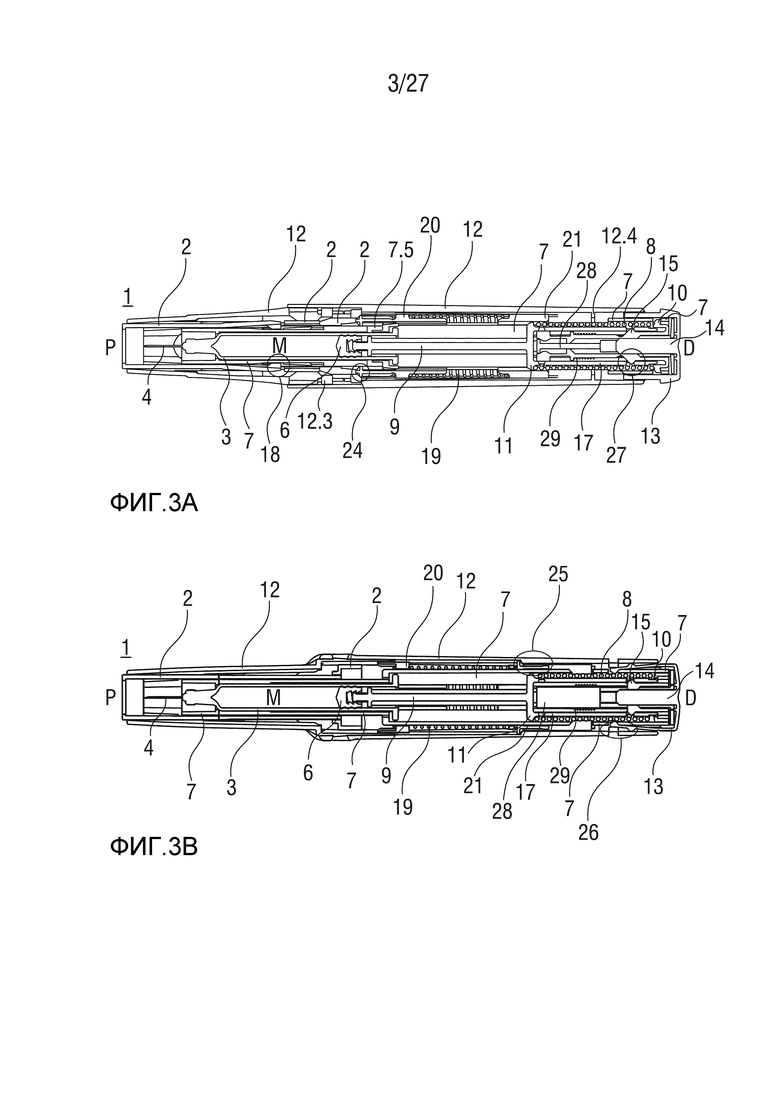
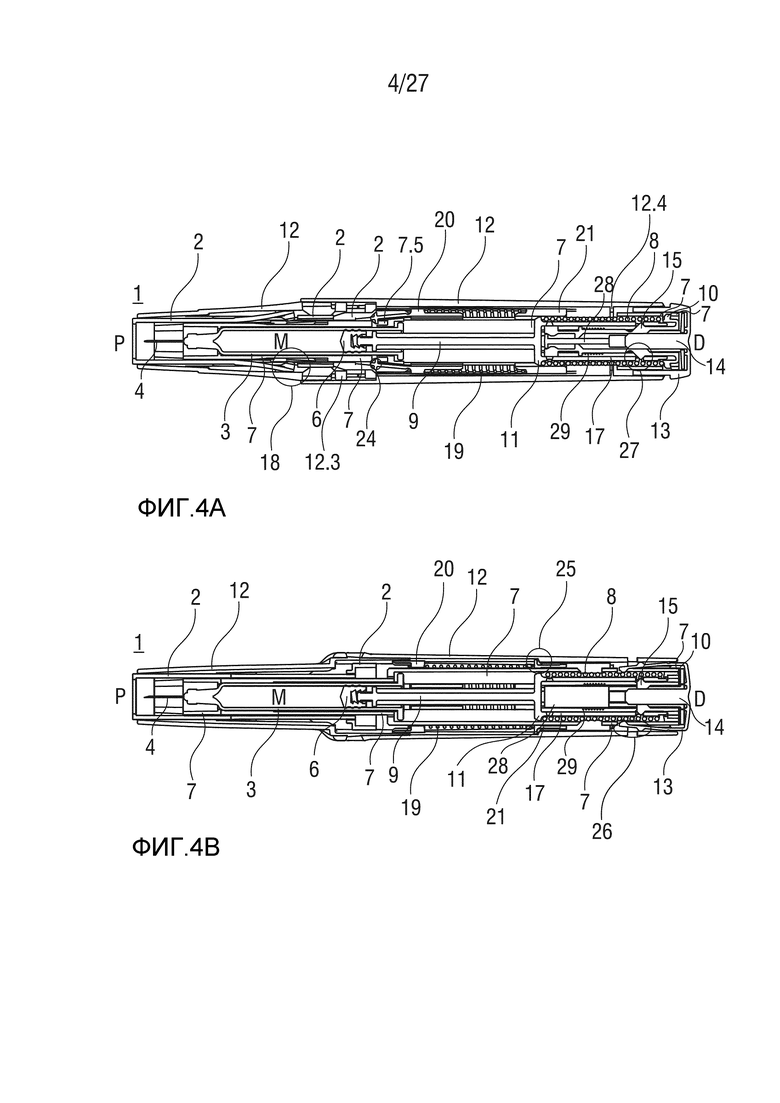
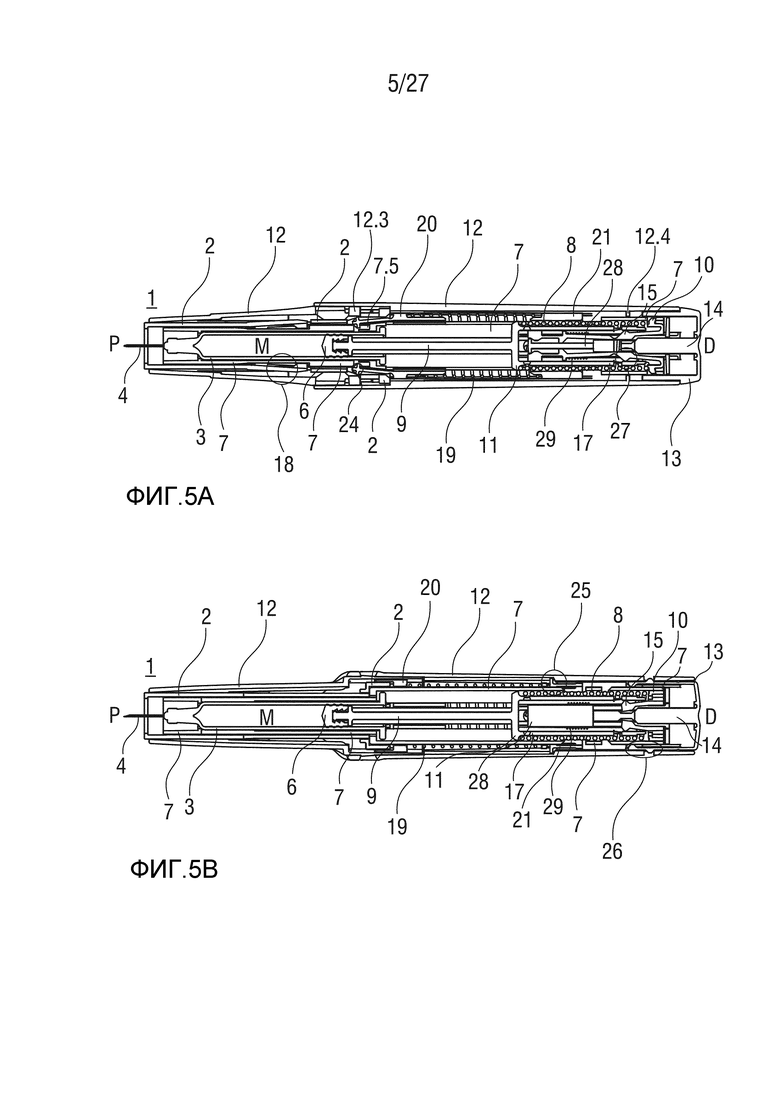
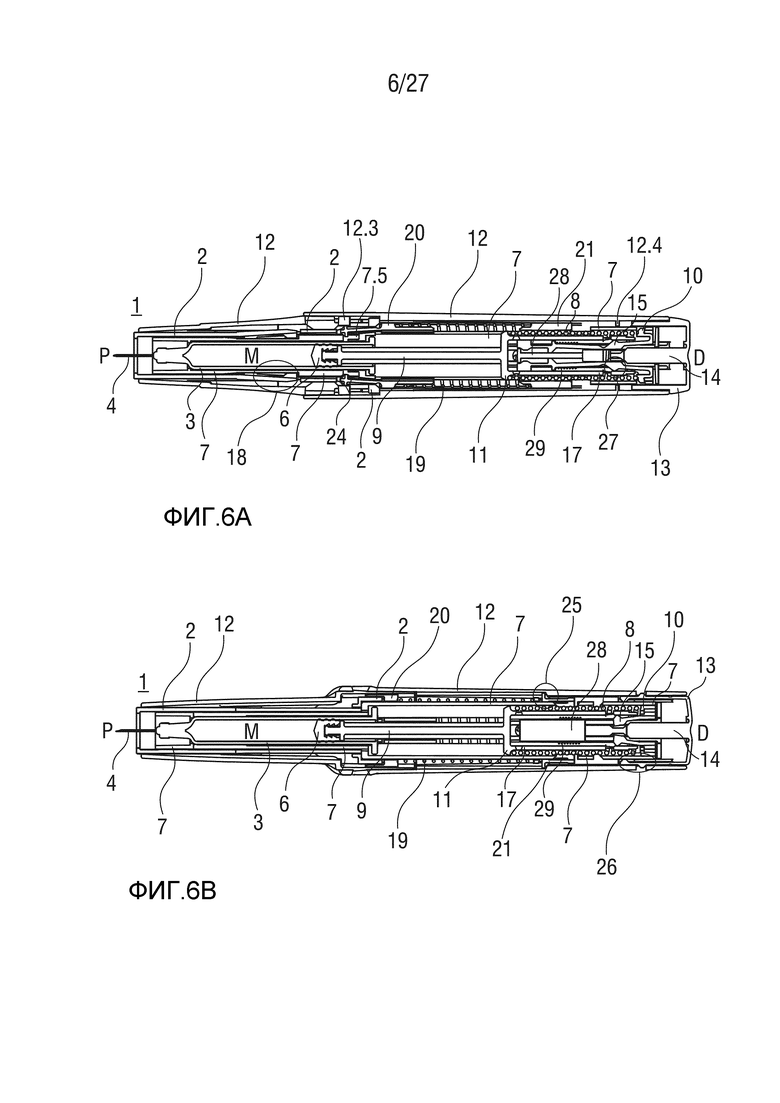
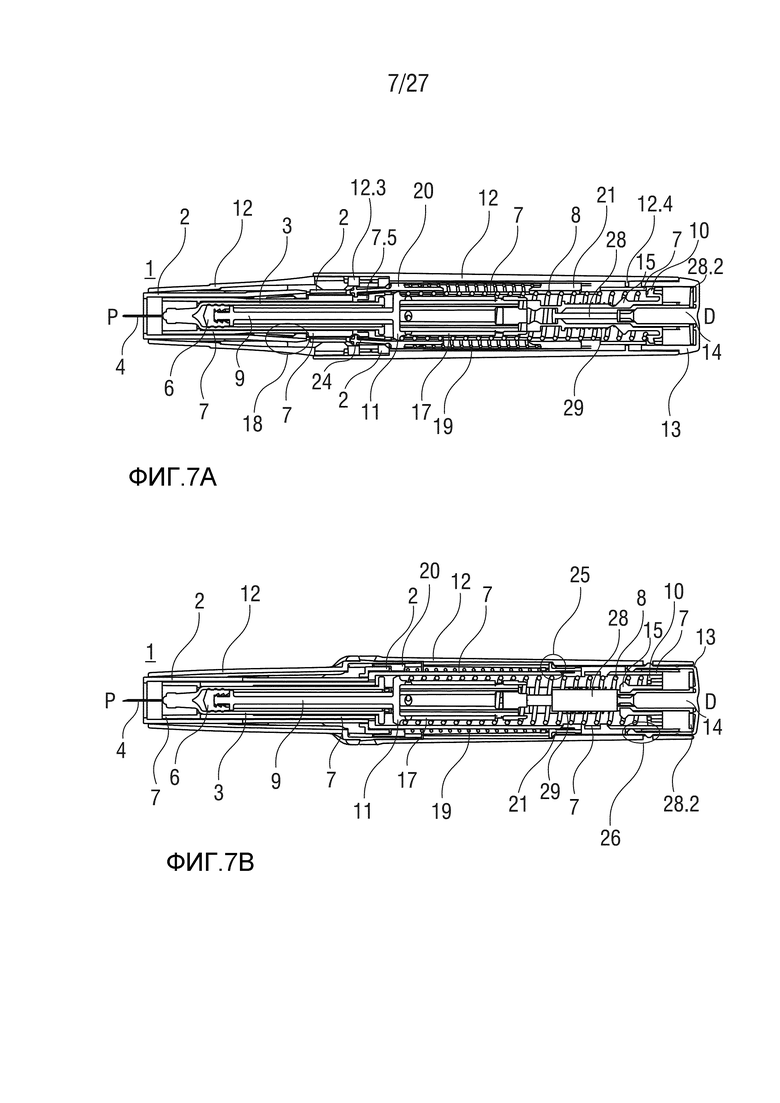
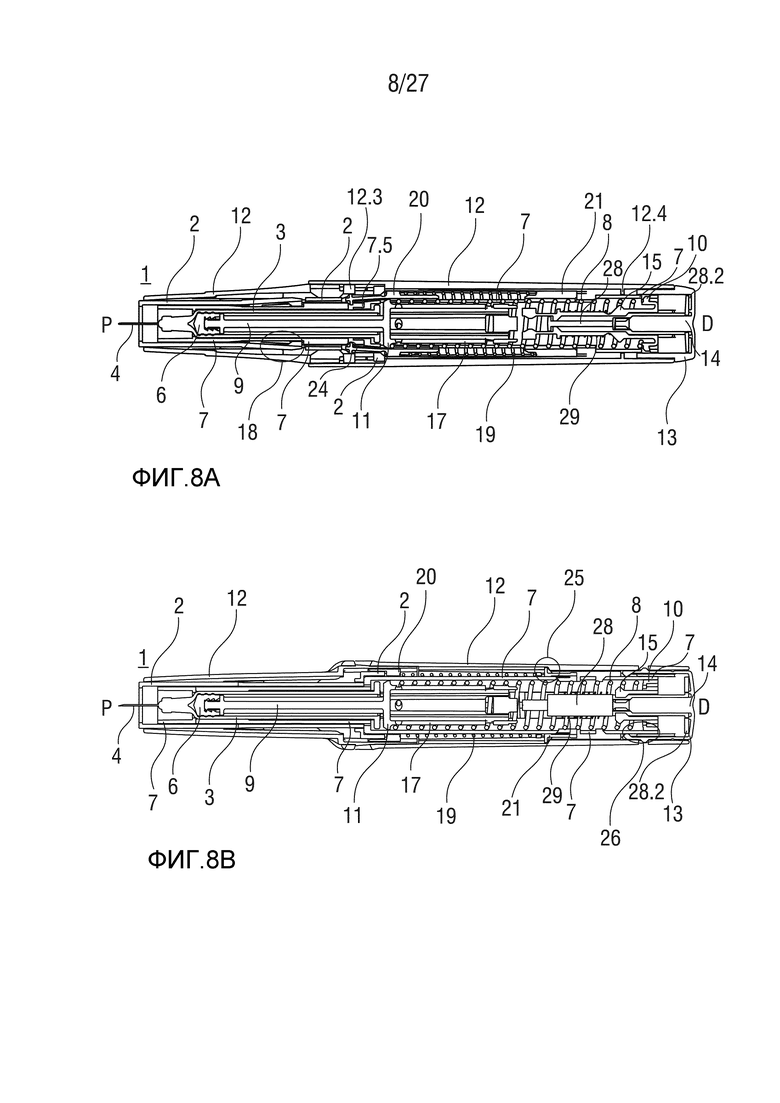
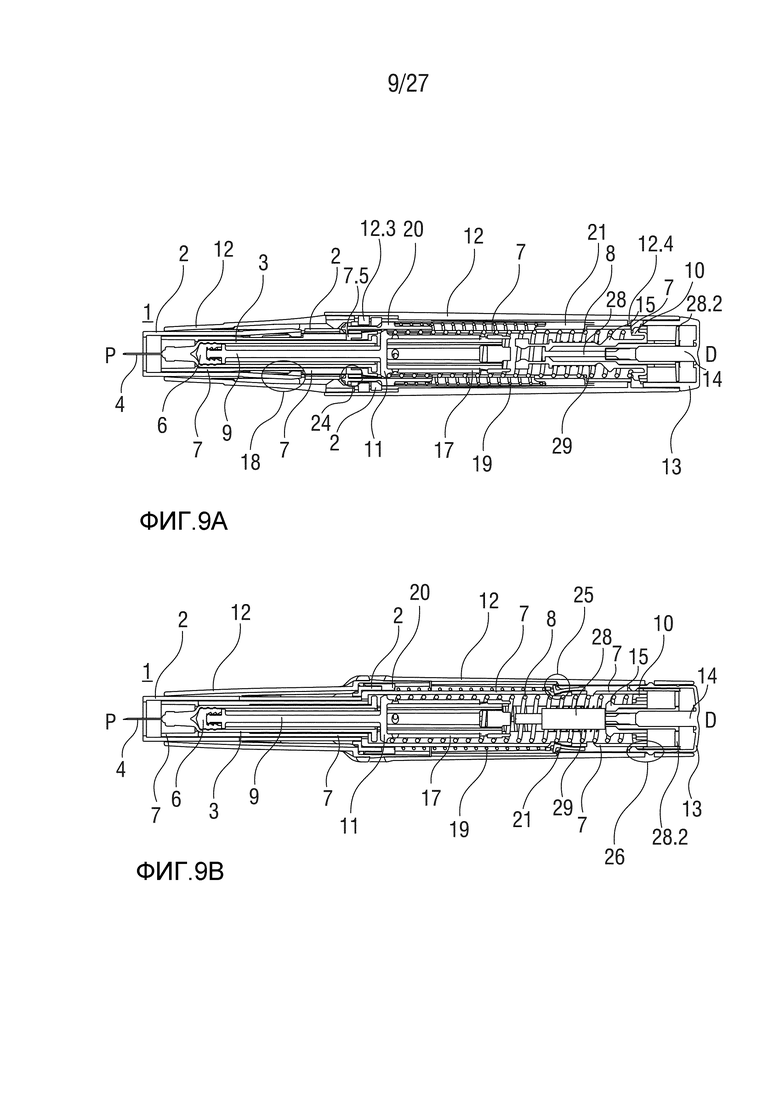
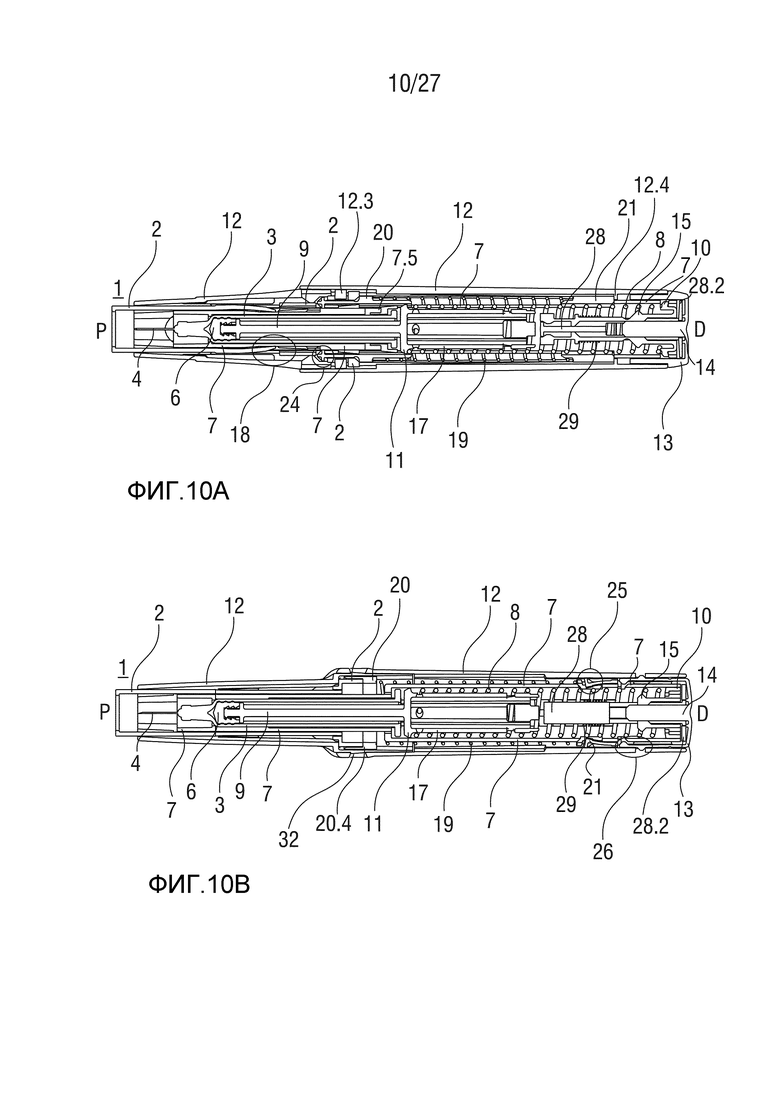
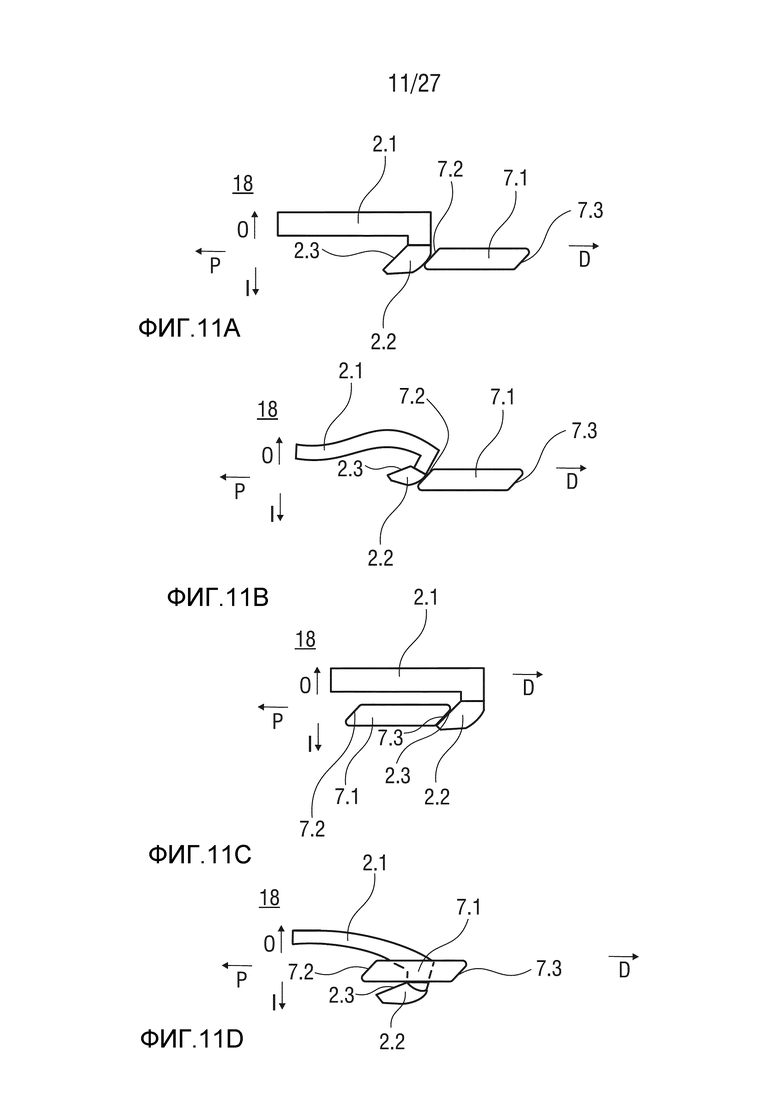
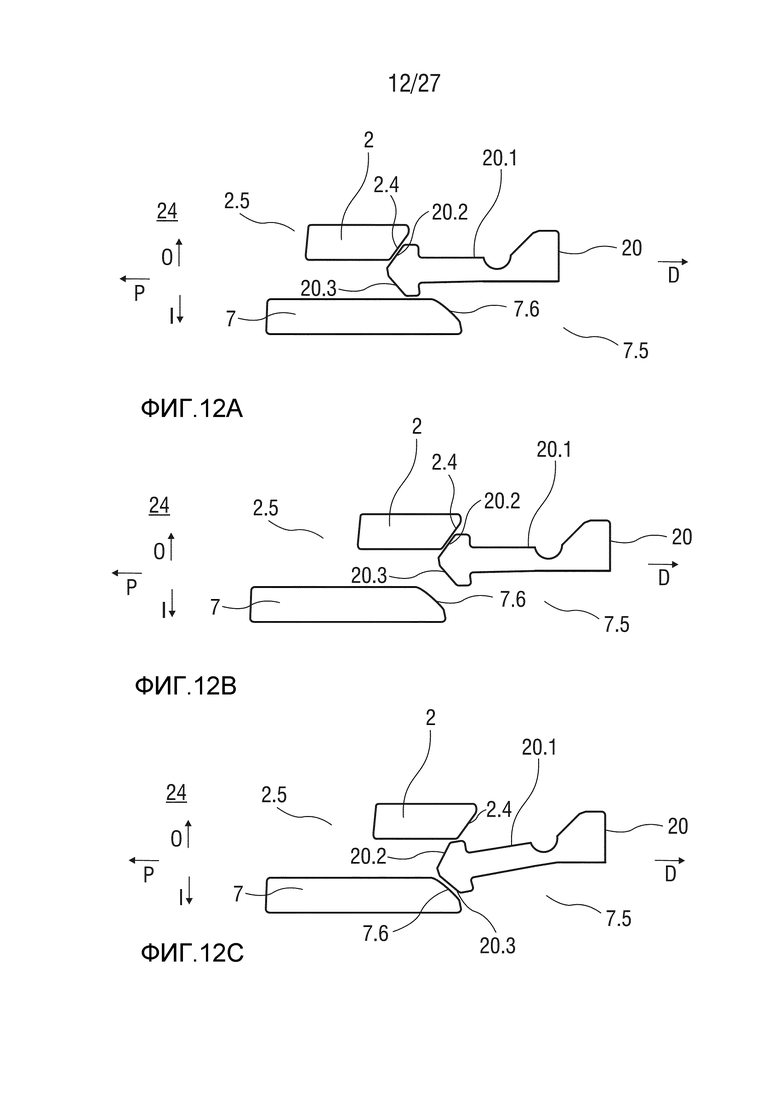
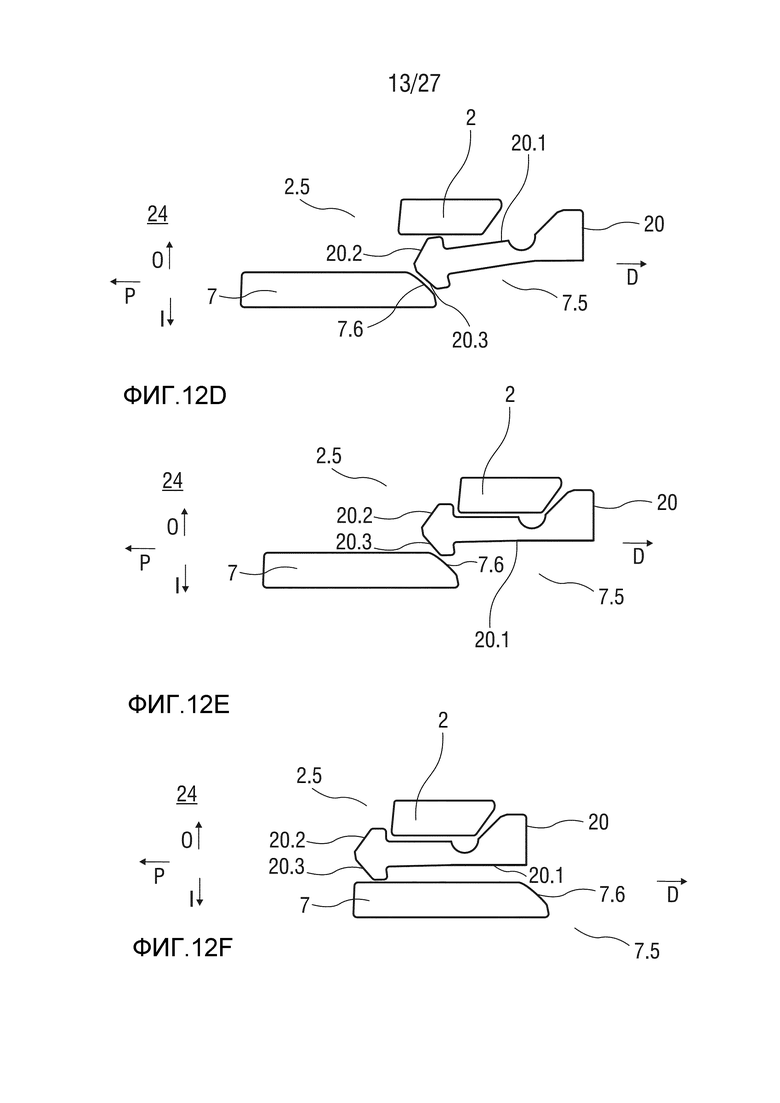
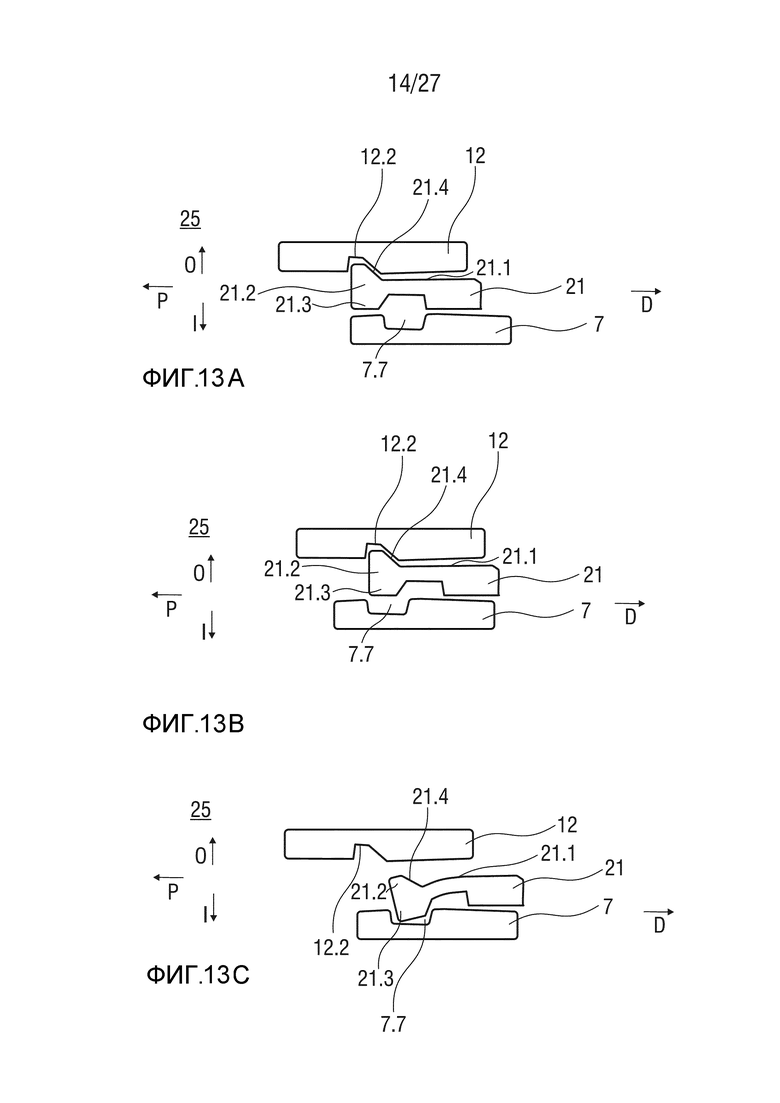
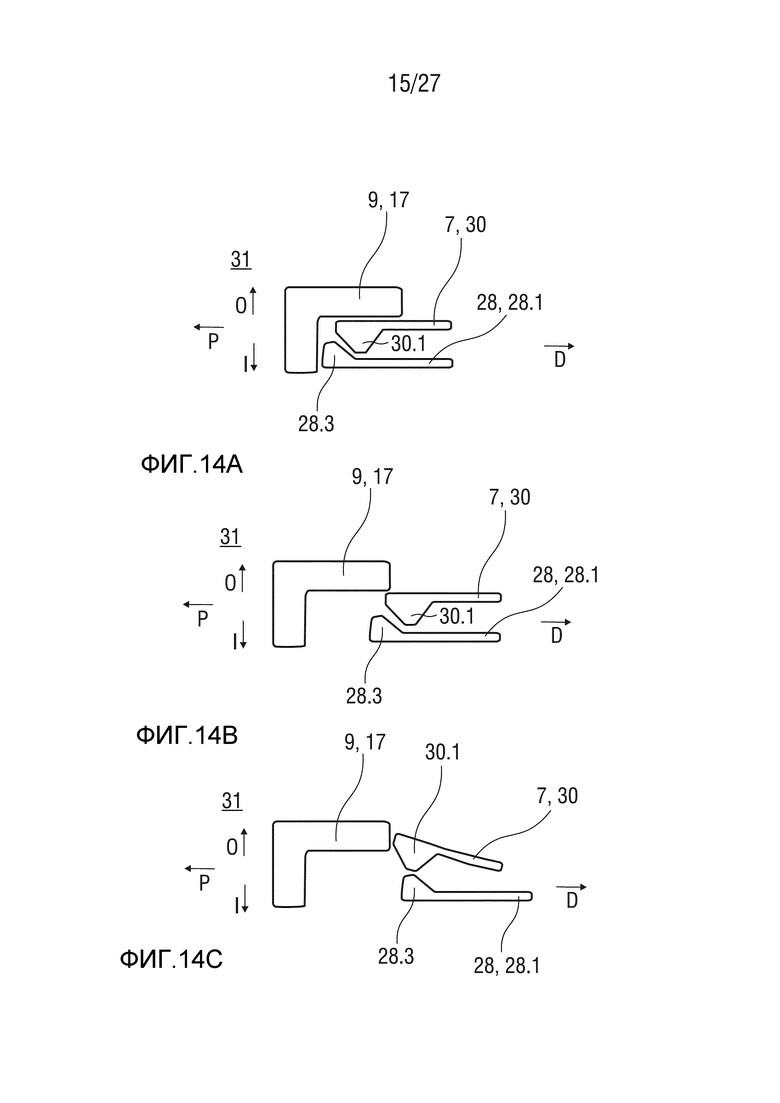
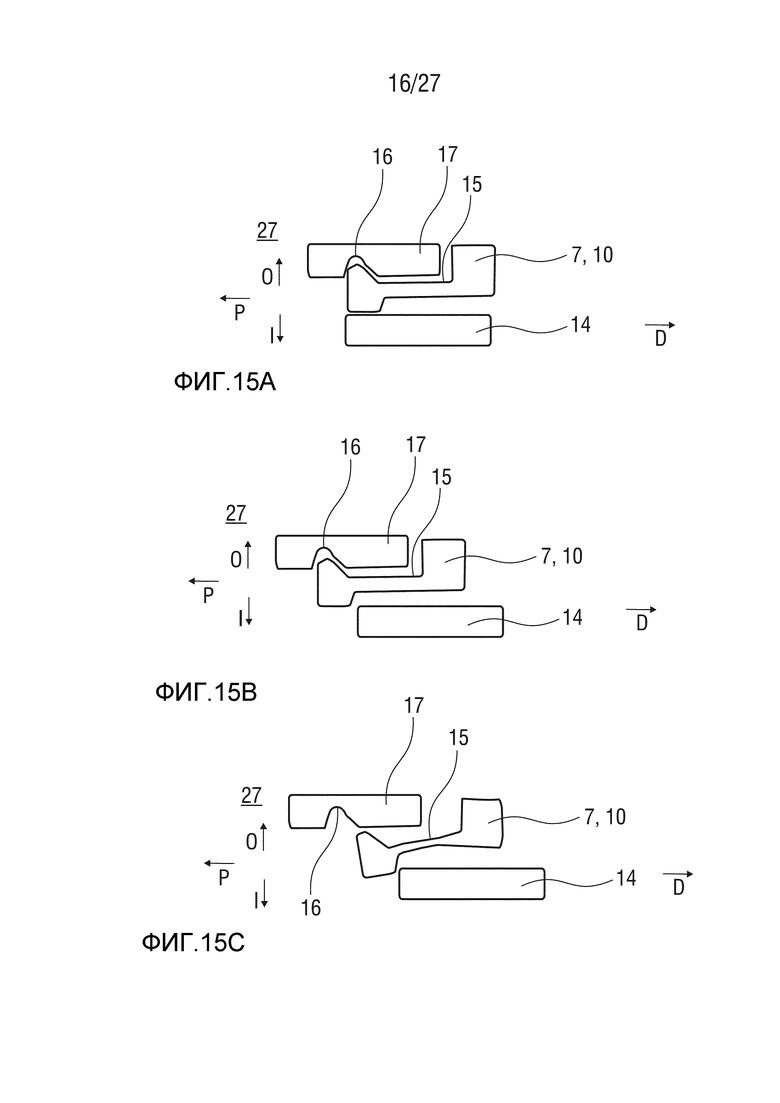
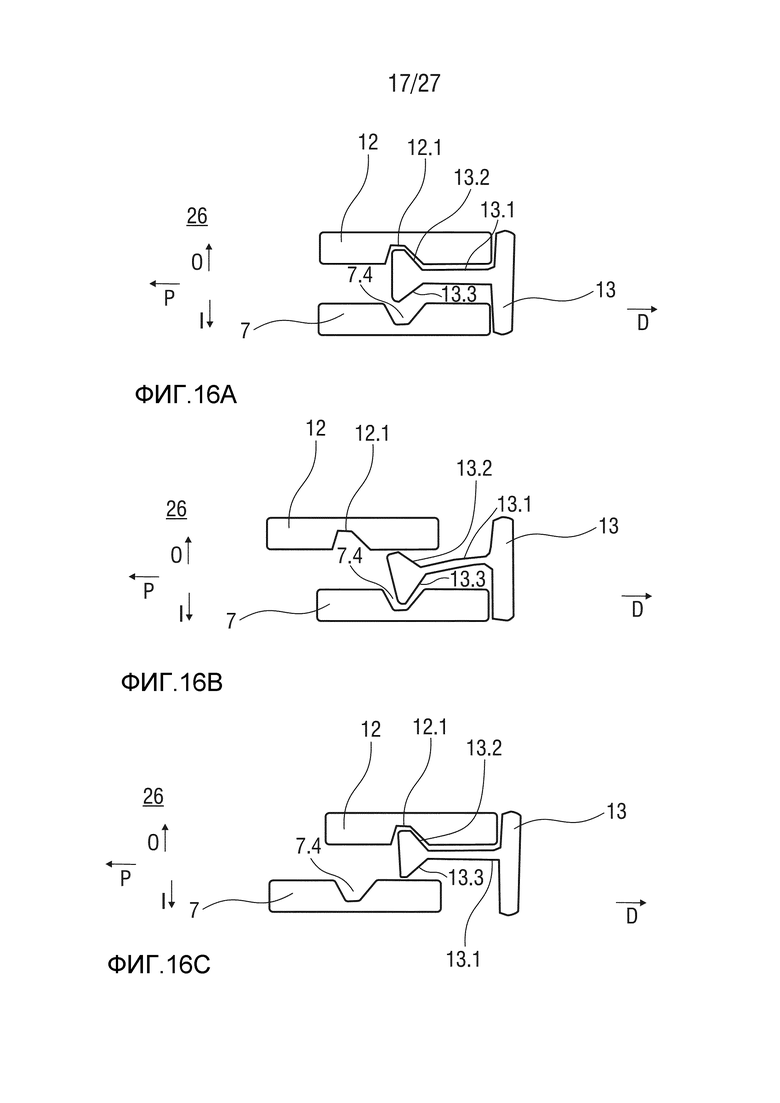
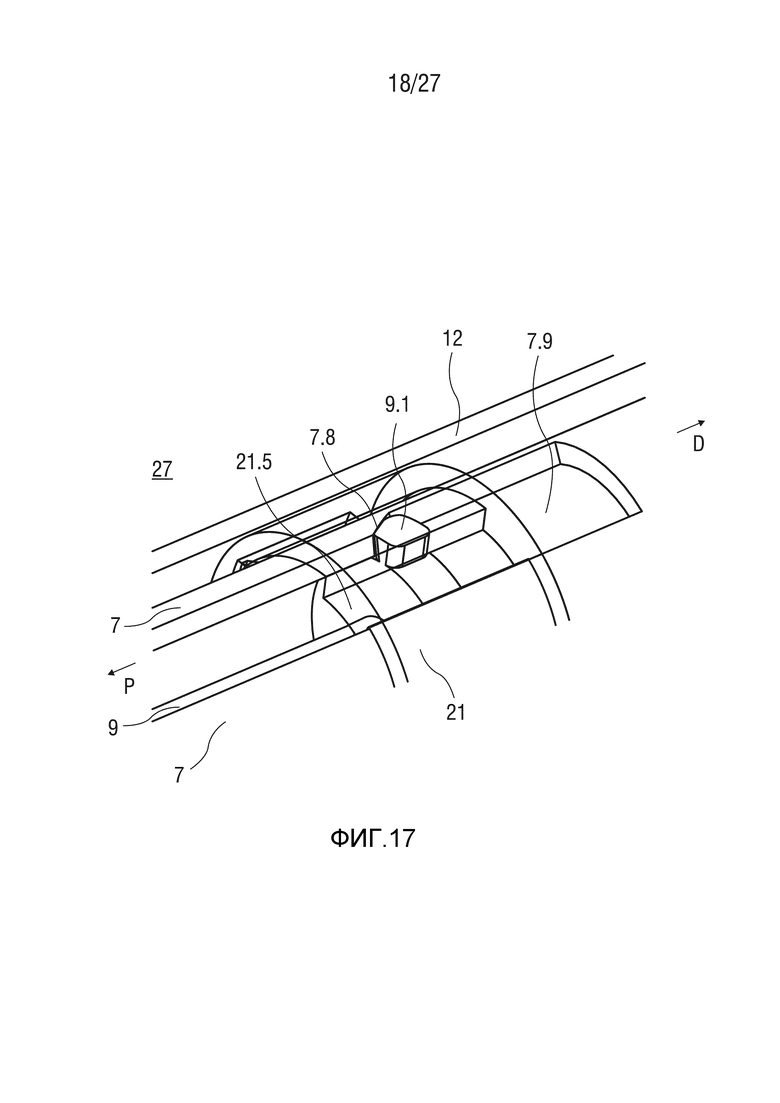
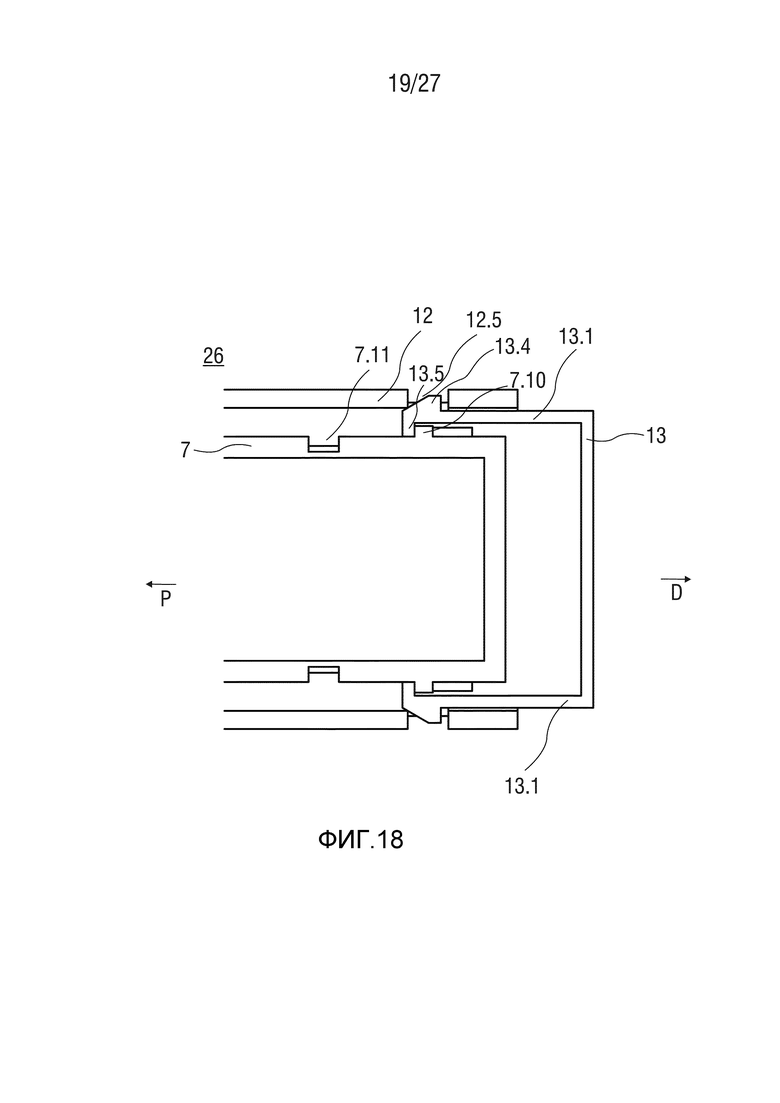
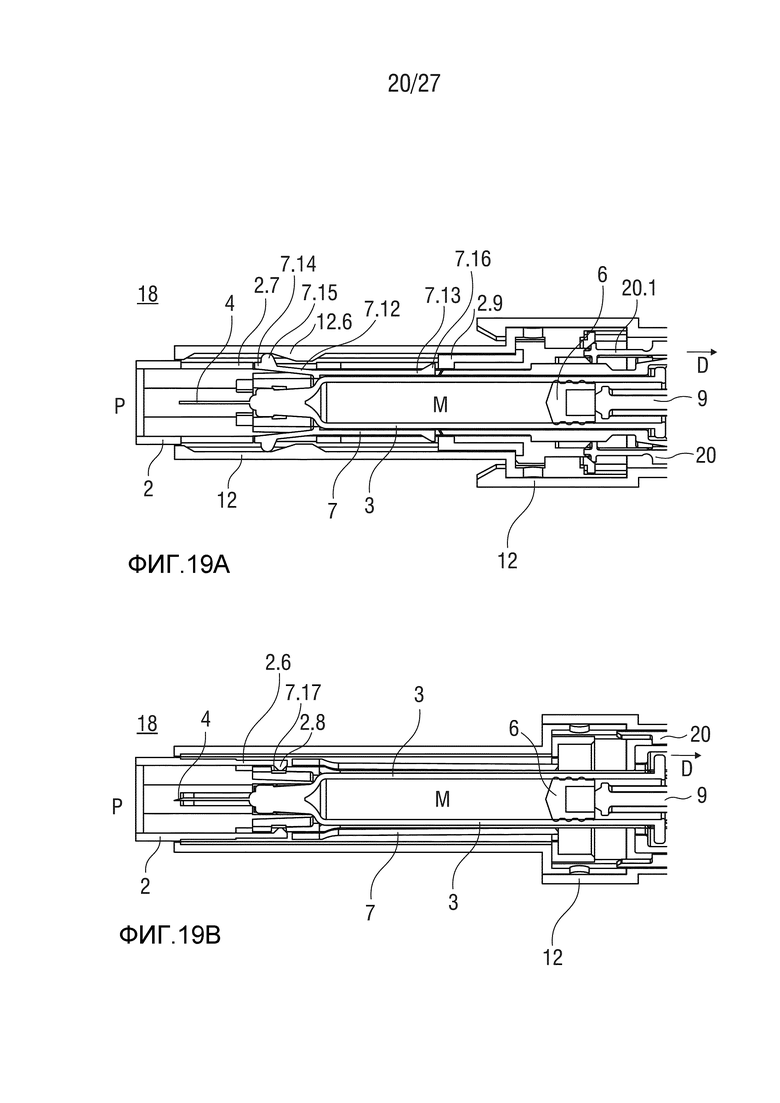
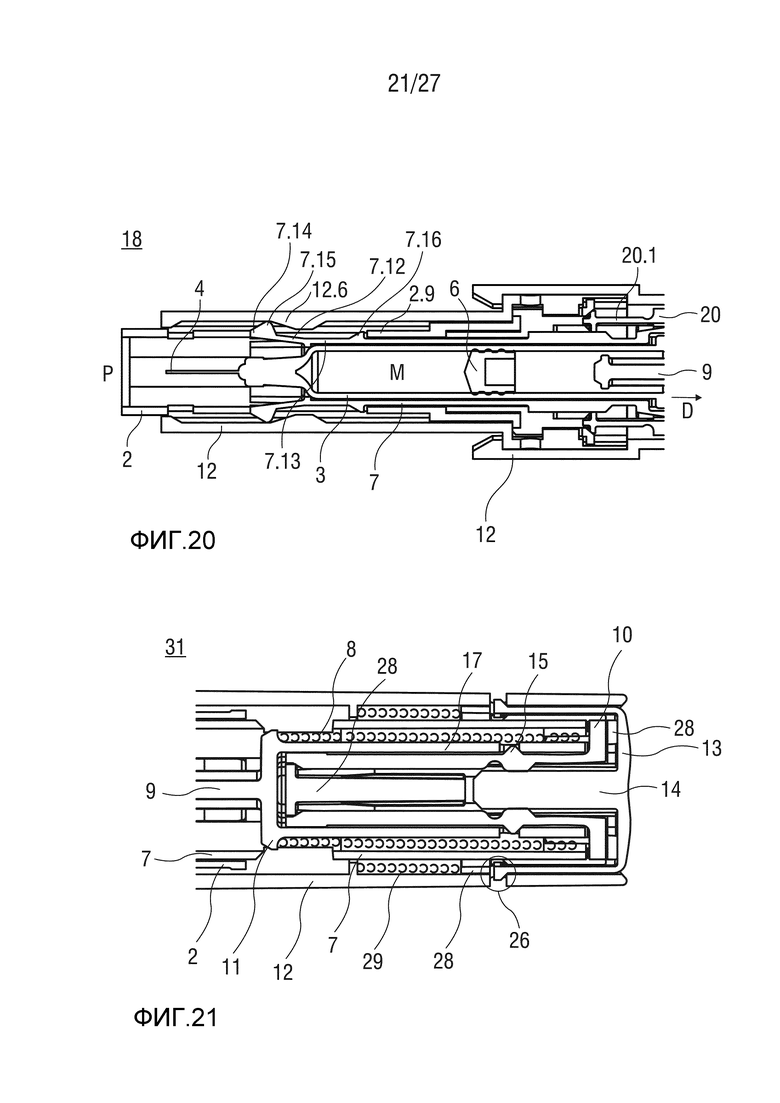
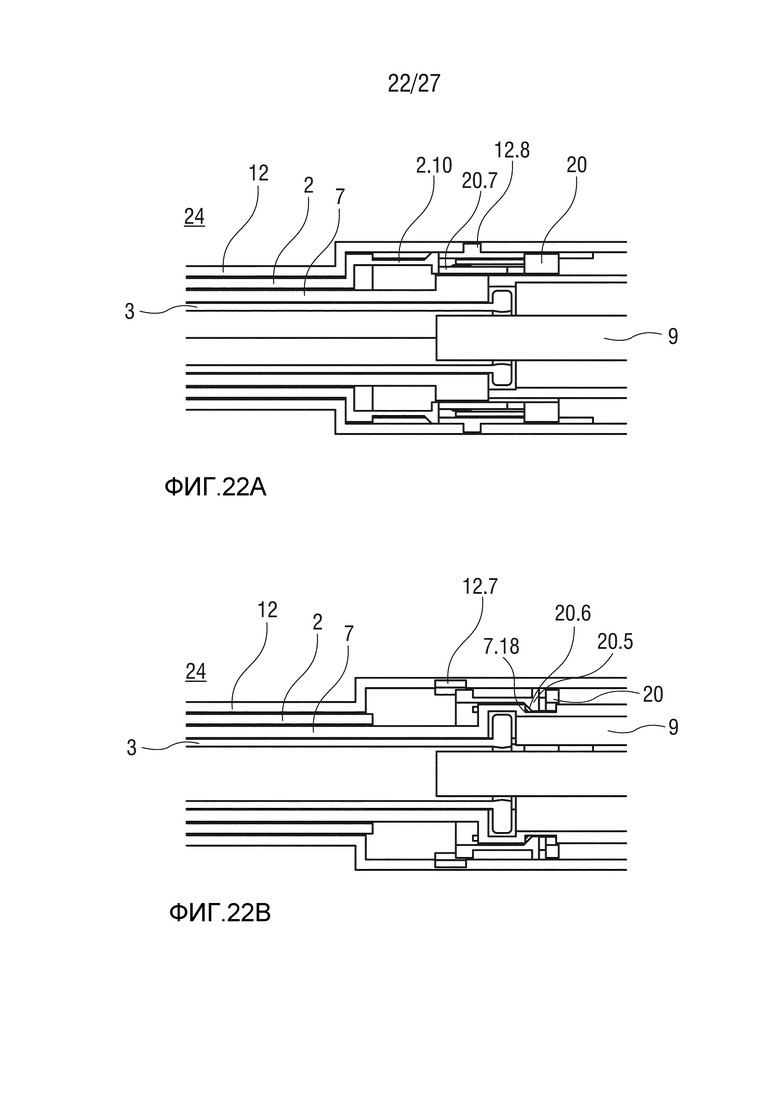
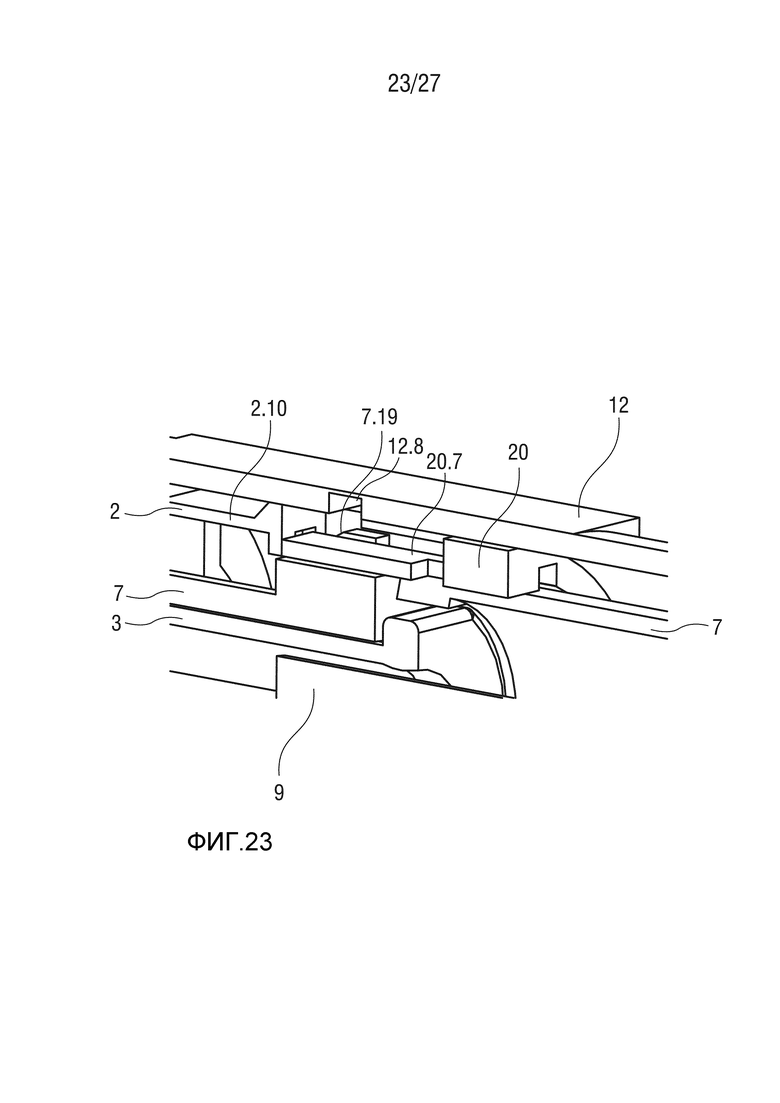
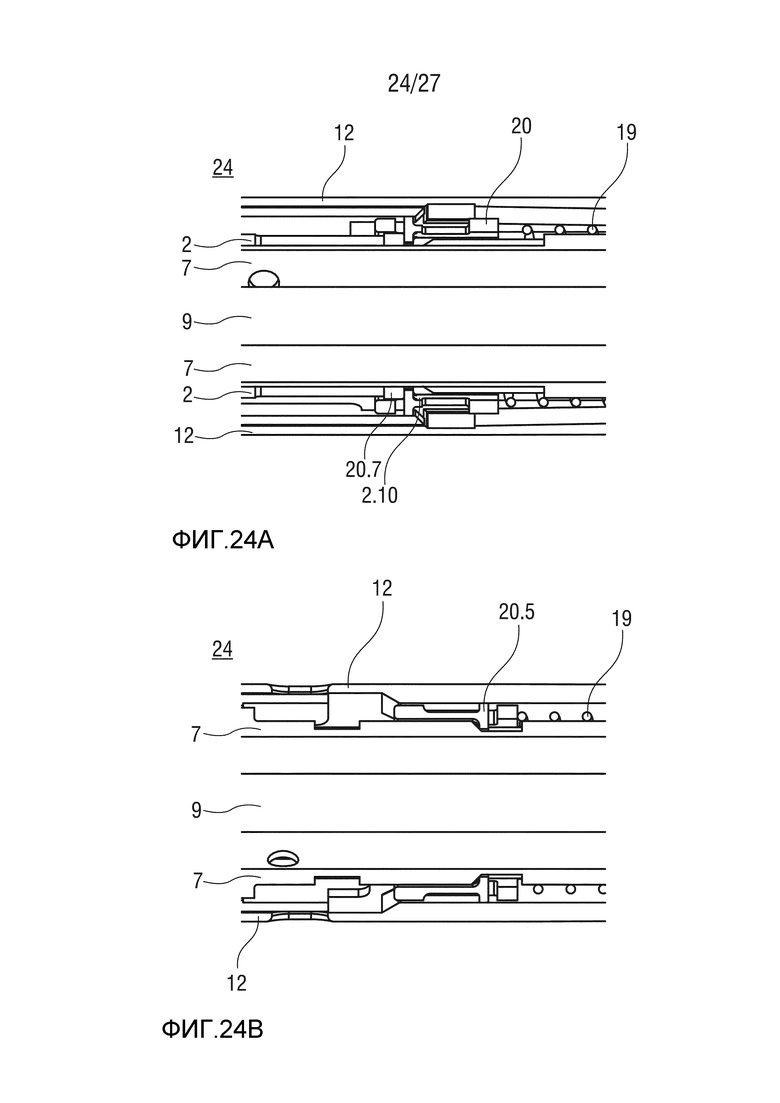
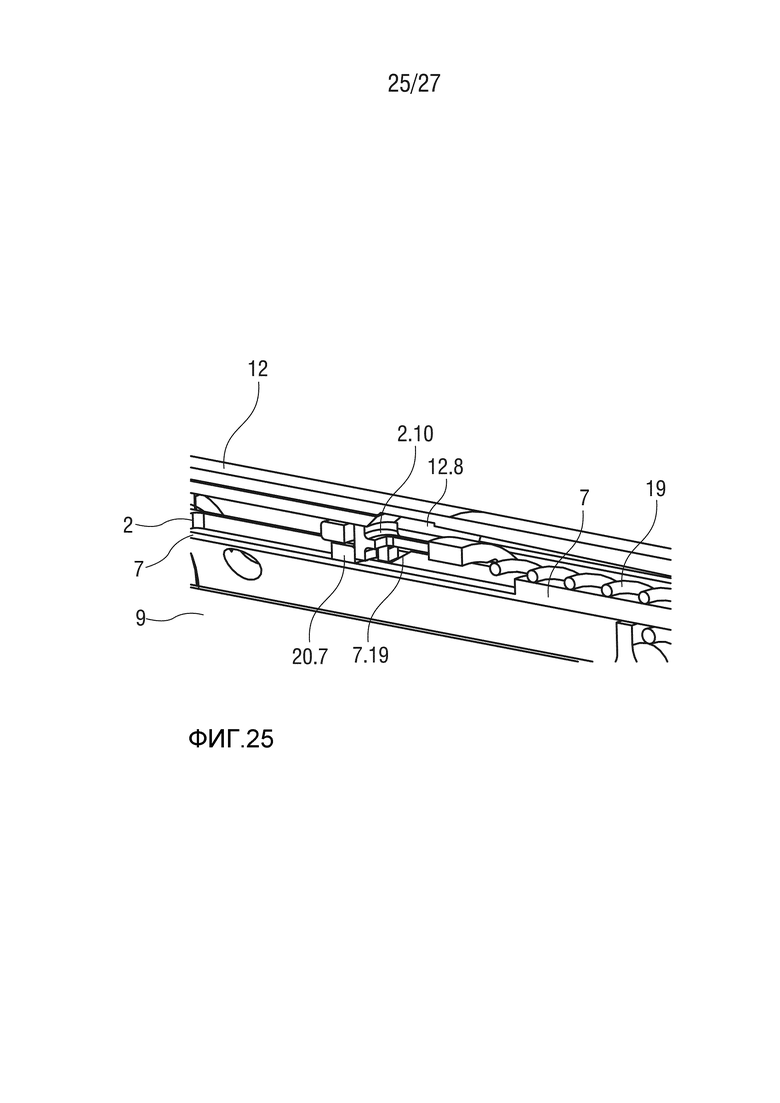
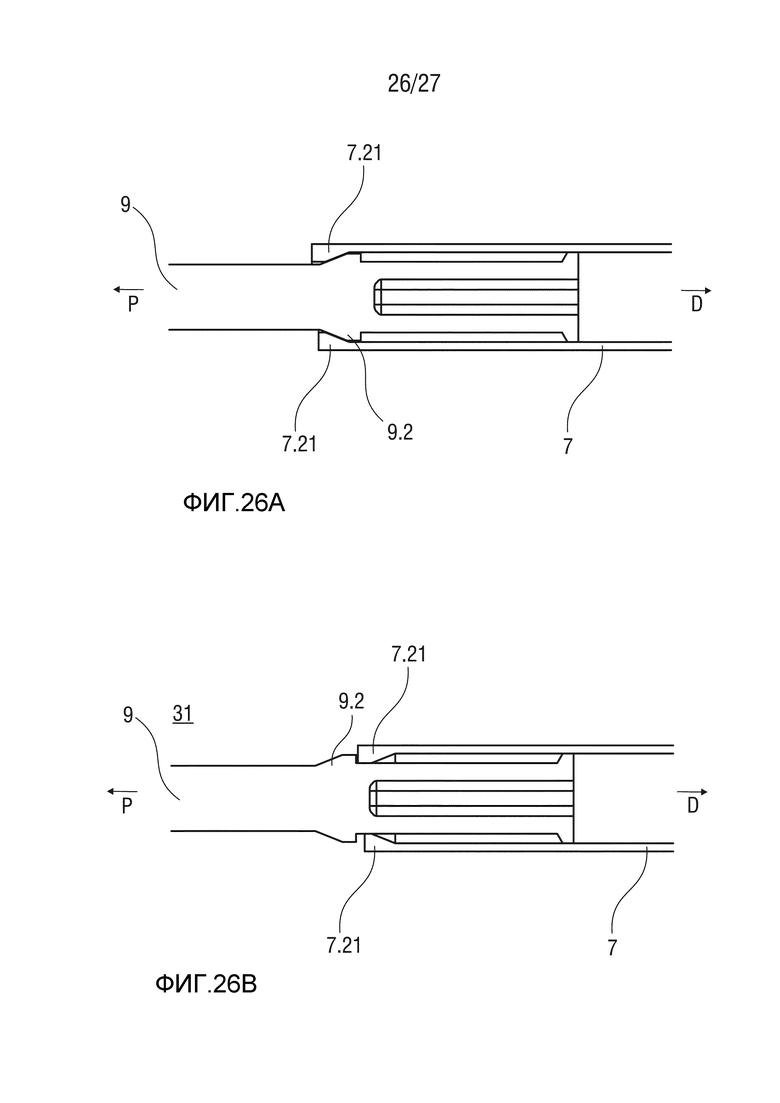
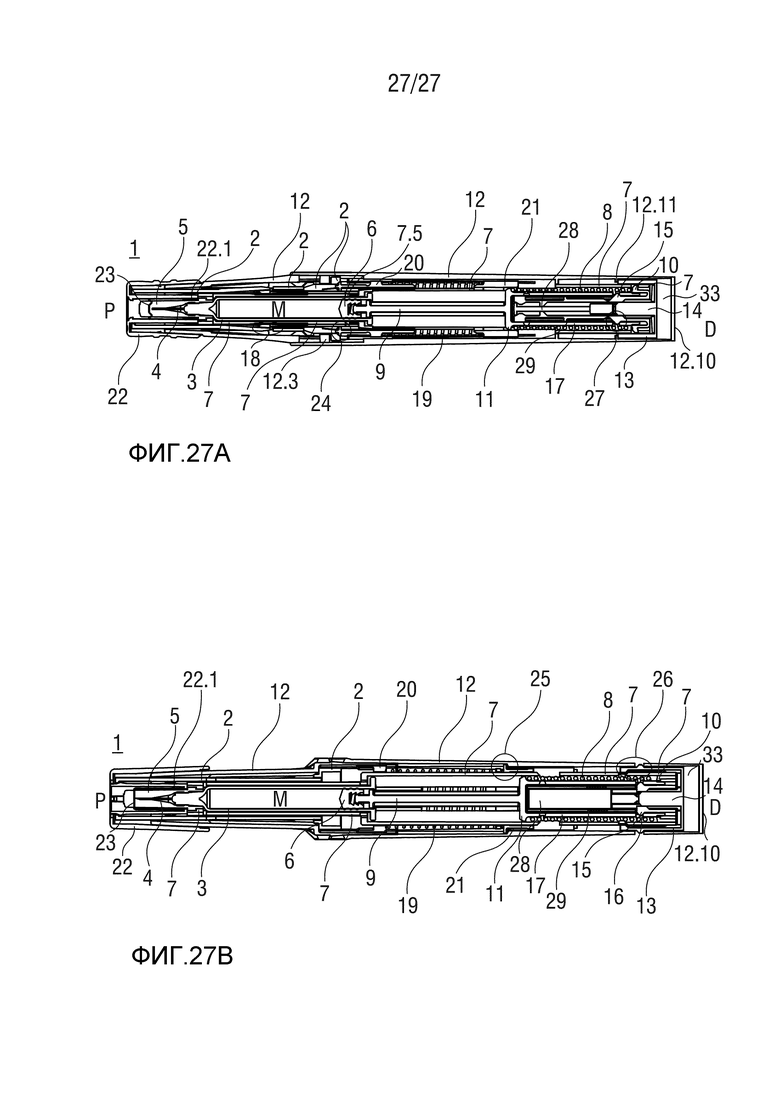
Изобретение относится к медицинской технике, а именно к инъекционным устройствам, и в частности к автоматическим инъекторам. Автоматический инъектор для введения дозы жидкого лекарственного средства содержит удлиненный трубчатый футляр и подузел оправы. Подузел оправы содержит трубчатую оправу, расположенную с возможностью сдвига внутри футляра. Оправа выполнена с возможностью вмещения шприца с полой инъекционной иглой, приводной пружины и плунжера для передачи нагрузки от приводной пружины на пробку-поршень шприца. Шприц является фиксируемым для совместного аксиального поступательного перемещения с оправой. Приводная пружина действует между оправой и плунжером. Плунжер в исходном состоянии зафиксирован к оправе посредством наклонного зацепления с оправой и посредством блокирования от поворота из упомянутого наклонного зацепления, в зависимости от относительного продольного положения оправы в футляре. Плунжер выполнен с возможностью деблокирования для поворота из наклонного зацепления после достижения иглой, по меньшей мере, почти предварительно заданной глубины инъекции, при поступательном перемещении оправы в проксимальном направлении для выдвижения иглы за пределы проксимального конца автоматического инъектора. Изобретение обладает механизмом деблокирования плунжера, являющимся особенно надежным и эффективным способом запуска инъекции лекарственного средства после достижения иглой глубины инъекции, исключающим так называемую мокрую инъекцию, т.е. вытекание лекарственного средства из иглы, что составляет проблему в традиционных автоматических инъекторах, в которых как введение иглы, так и инъекция выполняются нажимом на пробку-поршень. 24 з.п. ф-лы, 27 ил.
1. Автоматический инъектор (1) для введения дозы жидкого лекарственного средства (М), содержащий:
- удлиненный трубчатый футляр (12),
- подузел оправы, содержащий трубчатую оправу (7), расположенную с возможностью сдвига внутри футляра (12), при этом оправа (7) выполнена с возможностью вмещения шприца (3) с полой инъекционной иглой (4), приводной пружины (8) и плунжера (9) для передачи нагрузки от приводной пружины (8) на пробку-поршень (6) шприца (3), причем шприц (3) является фиксируемым для совместного аксиального поступательного перемещения с оправой (7), причем приводная пружина (8) действует между оправой (7) и плунжером (9),
причем плунжер (9) в исходном состоянии зафиксирован к оправе (7) посредством наклонного зацепления с оправой (7) и посредством блокирования от поворота из упомянутого наклонного зацепления, в зависимости от относительного продольного положения оправы (7) в футляре (12), причем плунжер (9) выполнен с возможностью деблокирования для поворота из наклонного зацепления после достижения иглой (4), по меньшей мере, почти предварительно заданной глубины инъекции при поступательном перемещении оправы (7) в проксимальном направлении (Р) для выдвижения иглы (4) за пределы проксимального конца автоматического инъектора (1).
2. Автоматический инъектор (1) по п.1, отличающийся тем, что оправа (7) имеет продольный вырез (7.9), при этом на плунжере (9) расположен внешний выступ (9.1) таким образом, чтобы входить в зацепление с поверхностью (7.8) на оправе (7) в вырезе (7.9), причем, по меньшей мере, что-то одно из внешнего выступа (9.1) или поверхности (7.8) на оправе (7) является наклонным, чтобы вынуждать плунжер (9) поворачиваться при поступательном перемещении, причем внутренний продольный выступ (21.5), соединенный с футляром (12), выступает внутрь в продольный вырез (7.9) таким образом, чтобы не допускать отцепления внешнего выступа (9.1) от поверхности (7.8) на оправе (7) до поступательного перемещения оправы (7) для выдвижения иглы (4), и причем внешний выступ (9.1) освобождается от внутреннего продольного выступа (21.5) при поступательном перемещении оправы (7) для выдвижения иглы (4), чтобы повернуться за пределы проксимального конца внутреннего продольного выступа (21.5) вследствие его наклонного зацепления с оправой (7) под действием приводной пружины (8).
3. Автоматический инъектор (1) по п.2, отличающийся тем, что внутренний продольный выступ (21.5) расположен на второй втулке (21), расположенной в футляре (12) и первоначально зафиксированной к футляру (12) для совместного аксиального поступательного перемещения, при этом вторая втулка (21) является частью механизма (25) управления отведением шприца, причем механизм (25) управления отведением шприца выполнен с возможностью расцепления с футляром (12) и зацепления с оправой (7), когда футляр (12) перемещают в дистальном направлении (D) после того, как оправа (7) поступательно перемещена для выдвижения иглы (4), причем устанавливающая пружина (19) расположена в футляре (12) вокруг оправы (7), и устанавливающая пружина (19) действует между второй втулкой (21) и проксимальной первой втулкой (20), чтобы поджимать футляр (12) или оправу (7) в дистальном направлении (D).
4. Автоматический инъектор (1) по п.3, отличающийся тем, что дополнительно содержит:
- трубчатый корпус (2), телескопически вдвигаемый в трубчатый футляр (12), при этом оправа (7) расположена с возможностью сдвига относительно корпуса (2),
- кнопку (13) спуска, расположенную дистально или сбоку в или на футляре (12),
- механизм (24) управления введением иглы, содержащий первую втулку (21) для соединения проксимального конца устанавливающей пружины (19) либо с оправой (7) для ее продвижения для введения иглы, либо с корпусом (2) для отведения иглы, в зависимости от относительного аксиального положения оправы (7) и корпуса (2),
- фиксирующий механизм (18), предназначенный для соединения корпуса (2) с оправой (7) для совместного аксиального поступательного перемещения относительно футляра (12), причем фиксирующий механизм (18) выполнен с возможностью отсоединения корпуса (2) от оправы (7), при приведении в действие кнопки (13) спуска, с предоставлением тем самым оправе (7) возможности перемещаться относительно корпуса (2), чтобы вынудить механизм (24) управления введением иглы переключить проксимальный конец устанавливающей пружины (19) на оправу (7) для введения иглы.
5. Автоматический инъектор (1) по п.4, отличающийся тем, что механизм (24) управления введением иглы содержит первую втулку (20), поджатую устанавливающей пружиной в проксимальном направлении (Р), при этом на первой втулке (20) проксимально расположена, по меньшей мере, одна упругая консоль (20.1), причем в оправе (7) и корпусе (2) расположены соответствующие выемки, причем поперечная протяженность наконечника упругой консоли (20.1) шире, чем зазор между оправой (7) и корпусом (2), что вынуждает наконечник упругой консоли (20.1) упираться в дистальную поверхность выемки в корпусе (2), с блокированием в данном состоянии, от отклонения в направлении (I) внутрь посредством оправы (7), или упираться в дистальную поверхность выемки в оправе (7), с блокированием, в данном состоянии, от отклонения в направлении (О) наружу посредством корпуса (2) и с передачей тем самым нагрузки от устанавливающей пружины (19) на оправу (7) для введения иглы, причем, упругая консоль (20.1) выполнена с возможностью переключения между корпусом (2) и оправой (7) посредством наклонного зацепления наконечника с дистальными поверхностями под действием устанавливающей пружины (19), в зависимости от продольного положения корпуса (2) относительно оправы (7).
6. Автоматический инъектор (1) по п.4, отличающийся тем, что фиксирующий механизм (18) выполнен с возможностью обеспечения силы противодействия, которую требуется преодолевать для продвижения оправы (7) в проксимальном направлении (Р) для введения иглы.
7. Автоматический инъектор (1) по п.5, отличающийся тем, что фиксирующий механизм (18) выполнен с возможностью обеспечения силы противодействия, которую требуется преодолевать для продвижения оправы (7) в проксимальном направлении (Р) для введения иглы.
8. Автоматический инъектор (1) по п.4, отличающийся тем, что фиксирующий механизм (18) выполнен с возможностью обеспечения силы противодействия, оказывающей сопротивление поступательному перемещению оправы (7) в дистальном направлении (D) относительно корпуса (2) для удерживания оправы (7) в определенном положении в переходном состоянии, в котором оба конца устанавливающей пружины (19) отсоединены от оправы (7).
9. Автоматический инъектор (1) по п.5, отличающийся тем, что фиксирующий механизм (18) выполнен с возможностью обеспечения силы противодействия, оказывающей сопротивление поступательному перемещению оправы (7) в дистальном направлении (D) относительно корпуса (2), для удерживания оправы (7) в определенном положении в переходном состоянии, в котором оба конца устанавливающей пружины (19) отсоединены от оправы (7).
10. Автоматический инъектор (1) по п.6, отличающийся тем, что фиксирующий механизм (18) выполнен с возможностью обеспечения силы противодействия, оказывающей сопротивление поступательному перемещению оправы (7) в дистальном направлении (D) относительно корпуса (2), для удерживания оправы (7) в определенном положении в переходном состоянии, в котором оба конца устанавливающей пружины (19) отсоединены от оправы (7).
11. Автоматический инъектор (1) по п.6, отличающийся тем, что фиксирующий механизм (18) содержит упругую консоль (2.1) на корпусе (2) и ромбовидный скошенный элемент (7.1) на оправе (7), при этом упругая консоль (2.1) является, по существу, прямолинейной в ненапряженном состоянии и имеет первый наконечник (2.2) консоли, выполненный с возможностью взаимодействия в наклонном зацеплении с проксимальной четвертой наклонной поверхностью (7.2) или дистальной пятой наклонной поверхностью (7.3) на ромбовидном скошенном элементе (7.1) таким образом, что приложение к оправе (7) сдвигающего усилия относительно корпуса (2) в проксимальном направлении (Р), при зацеплении первого наконечника (2.2) консоли с четвертой наклонной поверхностью (7.2), отклоняет упругую консоль (2.1) в одном поперечном направлении (О, I), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль одной поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном относительном поступательном перемещении компонентов (2, 7), причем упругая консоль (2.1) получает возможность перехода в ненапряженное состояние, как только первый наконечник (2.2) консоли достигает пятой наклонной поверхности (7.3) и тем самым входит с ней в зацепление таким образом, что приложение сдвигающего усилия к оправе (7) в дистальном направлении (D) отклоняет упругую консоль (2.1) в другом поперечном направлении (I, О), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль другой поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном поступательном перемещении оправы (7).
12. Автоматический инъектор (1) по п.7, отличающийся тем, что фиксирующий механизм (18) содержит упругую консоль (2.1) на корпусе (2) и ромбовидный скошенный элемент (7.1) на оправе (7), при этом упругая консоль (2.1) является, по существу, прямолинейной в ненапряженном состоянии и имеет первый наконечник (2.2) консоли, выполненный с возможностью взаимодействия в наклонном зацеплении с проксимальной четвертой наклонной поверхностью (7.2) или дистальной пятой наклонной поверхностью (7.3) на ромбовидном скошенном элементе (7.1) таким образом, что приложение к оправе (7) сдвигающего усилия относительно корпуса (2) в проксимальном направлении (Р), при зацеплении первого наконечника (2.2) консоли с четвертой наклонной поверхностью (7.2), отклоняет упругую консоль (2.1) в одном поперечном направлении (О, I), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль одной поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном относительном поступательном перемещении компонентов (2, 7), причем упругая консоль (2.1) получает возможность перехода в ненапряженное состояние, как только первый наконечник (2.2) консоли достигает пятой наклонной поверхности (7.3) и тем самым входит с ней в зацепление таким образом, что приложение сдвигающего усилия к оправе (7) в дистальном направлении (D) отклоняет упругую консоль (2.1) в другом поперечном направлении (I, О), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль другой поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном поступательном перемещении оправы (7).
13. Автоматический инъектор (1) по п.8, отличающийся тем, что фиксирующий механизм (18) содержит упругую консоль (2.1) на корпусе (2) и ромбовидный скошенный элемент (7.1) на оправе (7), при этом упругая консоль (2.1) является, по существу, прямолинейной в ненапряженном состоянии и имеет первый наконечник (2.2) консоли, выполненный с возможностью взаимодействия в наклонном зацеплении с проксимальной четвертой наклонной поверхностью (7.2) или дистальной пятой наклонной поверхностью (7.3) на ромбовидном скошенном элементе (7.1) таким образом, что приложение к оправе (7) сдвигающего усилия относительно корпуса (2) в проксимальном направлении (Р), при зацеплении первого наконечника (2.2) консоли с четвертой наклонной поверхностью (7.2), отклоняет упругую консоль (2.1) в одном поперечном направлении (О, I), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль одной поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном относительном поступательном перемещении компонентов (2, 7), причем упругая консоль (2.1) получает возможность перехода в ненапряженное состояние, как только первый наконечник (2.2) консоли достигает пятой наклонной поверхности (7.3) и тем самым входит с ней в зацепление таким образом, что приложение сдвигающего усилия к оправе (7) в дистальном направлении (D) отклоняет упругую консоль (2.1) в другом поперечном направлении (I, О), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль другой поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном поступательном перемещении оправы (7).
14. Автоматический инъектор (1) по п.9, отличающийся тем, что фиксирующий механизм (18) содержит упругую консоль (2.1) на корпусе (2) и ромбовидный скошенный элемент (7.1) на оправе (7), при этом упругая консоль (2.1) является, по существу, прямолинейной в ненапряженном состоянии и имеет первый наконечник (2.2) консоли, выполненный с возможностью взаимодействия в наклонном зацеплении с проксимальной четвертой наклонной поверхностью (7.2) или дистальной пятой наклонной поверхностью (7.3) на ромбовидном скошенном элементе (7.1) таким образом, что приложение к оправе (7) сдвигающего усилия относительно корпуса (2) в проксимальном направлении (Р), при зацеплении первого наконечника (2.2) консоли с четвертой наклонной поверхностью (7.2), отклоняет упругую консоль (2.1) в одном поперечном направлении (О, I), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль одной поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном относительном поступательном перемещении компонентов (2, 7), причем упругая консоль (2.1) получает возможность перехода в ненапряженное состояние, как только первый наконечник (2.2) консоли достигает пятой наклонной поверхности (7.3) и тем самым входит с ней в зацепление таким образом, что приложение сдвигающего усилия к оправе (7) в дистальном направлении (D) отклоняет упругую консоль (2.1) в другом поперечном направлении (I, О), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль другой поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном поступательном перемещении оправы (7).
15. Автоматический инъектор (1) по п.10, отличающийся тем, что фиксирующий механизм (18) содержит упругую консоль (2.1) на корпусе (2) и ромбовидный скошенный элемент (7.1) на оправе (7), при этом упругая консоль (2.1) является, по существу, прямолинейной в ненапряженном состоянии и имеет первый наконечник (2.2) консоли, выполненный с возможностью взаимодействия в наклонном зацеплении с проксимальной четвертой наклонной поверхностью (7.2) или дистальной пятой наклонной поверхностью (7.3) на ромбовидном скошенном элементе (7.1) таким образом, что приложение к оправе (7) сдвигающего усилия относительно корпуса (2) в проксимальном направлении (Р), при зацеплении первого наконечника (2.2) консоли с четвертой наклонной поверхностью (7.2), отклоняет упругую консоль (2.1) в одном поперечном направлении (О, I), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль одной поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном относительном поступательном перемещении компонентов (2, 7), причем упругая консоль (2.1) получает возможность перехода в ненапряженное состояние, как только первый наконечник (2.2) консоли достигает пятой наклонной поверхности (7.3) и тем самым входит с ней в зацепление таким образом, что приложение сдвигающего усилия к оправе (7) в дистальном направлении (D) отклоняет упругую консоль (2.1) в другом поперечном направлении (I, О), когда предварительно заданная величина сдвигающего усилия, зависящая от, по меньшей мере, упругости упругой консоли (2.1), превышена, чтобы позволить первому наконечнику (2.2) консоли передвигаться вдоль другой поперечной стороны ромбовидного скошенного элемента (7.1), при непрерывном поступательном перемещении оправы (7).
16. Автоматический инъектор (1) по одному из пп.4-15, отличающийся тем, что футляр (12) выполнен с возможностью блокировки фиксирующего механизма (18) до поступательного перемещения в проксимальном направлении (Р) относительно корпуса (2), при этом футляр (12) выполнен с возможностью, при поступательном перемещении в выдвинутое положение в проксимальном направлении (Р), деблокирования фиксирующего механизма (18) с приведением его в действие.
17. Автоматический инъектор (1) по одному из пп.4-15, отличающийся тем, что дистально расположенная кнопка (13) спуска, по меньшей мере, в исходном состоянии соединена с оправой (7), при этом футляр (12) выполнен с возможностью упора в кнопку (13) спуска в исходном состоянии, не допускающем нажатия кнопки (13), спуска, причем при поступательном перемещении футляра (12) в выдвинутое положение относительно корпуса (2) кнопка (13) спуска остается соединенной с оправой (7) и поэтому выступает из футляра (12), чтобы предоставить возможность нажатия для начала цикла инъекции.
18. Автоматический инъектор (1) по п.16, отличающийся тем, что дистально расположенная кнопка (13) спуска, по меньшей мере, в исходном состоянии соединена с оправой (7), при этом футляр (12) выполнен с возможностью упора в кнопку (13) спуска в исходном состоянии, не допускающем нажатия кнопки (13) спуска, причем при поступательном перемещении футляра (12) в выдвинутое положение относительно корпуса (2), кнопка (13) спуска остается соединенной с оправой (7) и поэтому выступает из футляра (12), чтобы предоставить возможность нажатия для начала цикла инъекции.
19. Автоматический инъектор (1) по одному из пп.3-15, отличающийся тем, что вторая втулка (21) содержит упругую проксимальную консоль (21.1) со вторым наконечником (21.2) консоли, содержащим внутренний выступ (21.3), при этом второй наконечник (21.2) консоли выполнен с возможностью нахождения в наклонном зацеплении со вторым упором (12.2) футляра в футляре (12) таким образом, чтобы сдвигать второй наконечник (21.2) консоли по наклонной плоскости в направлении (I) внутрь под действием устанавливающей пружины (19) в дистальном направлении (D), причем внутренний выступ (21.3) выполнен с возможностью внутреннего упора в оправу (7) для предотвращения отклонения внутрь второго наконечника (21.2) консоли и удерживания второй втулки (21) в состоянии фиксации к футляру (12), причем в оправе (7) расположена третья выемка (7.7) для предоставления возможности отклонения внутреннего выступа (21.3) внутрь во время поступательного перемещения футляра (12) в дистальном направлении (D) относительно оправы (7), при удалении автоматического инъектора (1) с места инъекции.
20. Автоматический инъектор (1) по п.16, отличающийся тем, что вторая втулка (21) содержит упругую проксимальную консоль (21.1) со вторым наконечником (21.2) консоли, содержащим внутренний выступ (21.3), при этом второй наконечник (21.2) консоли выполнен с возможностью нахождения в наклонном зацеплении со вторым упором (12.2) футляра в футляре (12) таким образом, чтобы сдвигать второй наконечник (21.2) консоли по наклонной плоскости в направлении (I) внутрь под действием устанавливающей пружины (19) в дистальном направлении (D), причем внутренний выступ (21.3) выполнен с возможностью внутреннего упора в оправу (7) для предотвращения отклонения внутрь второго наконечника (21.2) консоли и удерживания второй втулки (21) в состоянии фиксации к футляру (12), причем в оправе (7) расположена третья выемка (7.7) для предоставления возможности отклонения внутреннего выступа (21.3) внутрь во время поступательного перемещения футляра (12) в дистальном направлении (D) относительно оправы (7), при удалении автоматического инъектора (1) с места инъекции.
21. Автоматический инъектор (1) по п.17, отличающийся тем, что вторая втулка (21) содержит упругую проксимальную консоль (21.1) со вторым наконечником (21.2) консоли, содержащим внутренний выступ (21.3), при этом второй наконечник (21.2) консоли выполнен с возможностью нахождения в наклонном зацеплении со вторым упором (12.2) футляра в футляре (12) таким образом, чтобы сдвигать второй наконечник (21.2) консоли по наклонной плоскости в направлении (I) внутрь под действием устанавливающей пружины (19) в дистальном направлении (D), причем внутренний выступ (21.3) выполнен с возможностью внутреннего упора в оправу (7) для предотвращения отклонения внутрь второго наконечника (21.2) консоли и удерживания второй втулки (21) в состоянии фиксации к футляру (12), причем в оправе (7) расположена третья выемка (7.7) для предоставления возможности отклонения внутреннего выступа (21.3) внутрь во время поступательного перемещения футляра (12) в дистальном направлении (D) относительно оправы (7), при удалении автоматического инъектора (1) с места инъекции.
22. Автоматический инъектор (1) по п.18, отличающийся тем, что вторая втулка (21) содержит упругую проксимальную консоль (21.1) со вторым наконечником (21.2) консоли, содержащим внутренний выступ (21.3), при этом второй наконечник (21.2) консоли выполнен с возможностью нахождения в наклонном зацеплении со вторым упором (12.2) футляра в футляре (12) таким образом, чтобы сдвигать второй наконечник (21.2) консоли по наклонной плоскости в направлении (I) внутрь под действием устанавливающей пружины (19) в дистальном направлении (D), причем внутренний выступ (21.3) выполнен с возможностью внутреннего упора в оправу (7) для предотвращения отклонения внутрь второго наконечника (21.2) консоли и удерживания второй втулки (21) в состоянии фиксации к футляру (12), причем в оправе (7) расположена третья выемка (7.7) для предоставления возможности отклонения внутреннего выступа (21.3) внутрь во время поступательного перемещения футляра (12) в дистальном направлении (D) относительно оправы (7), при удалении автоматического инъектора (1) с места инъекции.
23. Автоматический инъектор (1) по одному из пп.4-15, отличающийся тем, что кнопка (13) спуска расположена дистально, при этом футляр (12) выполнен в виде закрытого гильзового спускового элемента, имеющего закрытый дистальный торец (12.10), перекрывающий кнопку (13) спуска, причем в исходном состоянии, между дистальным торцом (12.10) гильзового спускового элемента (12) и кнопкой (13) спуска обеспечен зазор (33), допускающий некоторое перемещение гильзового спускового элемента (12) в проксимальном направлении (Р) против поджимающего усилия устанавливающей пружины (19) в первой фазе, перед упором в кнопку (13) спуска.
24. Автоматический инъектор (1) по одному из пп.1-15, отличающийся тем, что обеспечен деблокируемый компонент (28) для создания шума, способный, после деблокирования, формировать звуковой и/или тактильный сигнал обратной связи для пользователя, при этом компонент (28) для создания шума выполнен с возможностью деблокирования, когда плунжер (9) приходит относительно шприца (3) в положение, в котором пробка-поршень (4) расположена вблизи проксимального конца шприца (3), и причем компонент (28) для создания шума сталкивается с вмещающим компонентом (12, 13), что указывает на окончание инъекции.
25. Автоматический инъектор (1) по одному из пп.4-15, отличающийся тем, что обеспечен визуальный индикатор использования, содержащий, по меньшей мере, одно индикаторное окно (32) в футляре (12), при этом часть корпуса (2) выполнена с возможностью нахождения позади индикаторного окна (32), когда футляр (12) находится в его дистальном положении с поджатием устанавливающей пружиной (19), причем язычок (20.4) на первой втулке (20) располагается снаружи от части корпуса (2) после того, как втулка (20) сдвинута в проксимальном направлении (Р) во время введения иглы, причем язычок (20.4) и часть корпуса (2) представляют визуально распознаваемый признак.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВА И ЕГО СОЧЕТАНИЕ С КОРПУСОМ ПО МЕНЬШЕЙ МЕРЕ НА ОДИН КОНТЕЙНЕР С ВВОДИМЫМ ПРЕПАРАТОМ | 1990 |
|
RU2108116C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

