ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству подачи мощности в переключаемом режиме и соответствующему способу. Кроме того, данное изобретение относится к устройству, содержащему нагрузку, запитываемую напряжением нагрузки и/или током нагрузки.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Переключаемые усилители мощности часто страдают нелинейностями из-за поведения переключения выходного каскада. Точная природа этих нелинейностей зависит не только от типа используемого силового полупроводникового прибора (приборов), но и от подсоединяемой схемы (схем) на сторонах нагрузки и привода. В прецизионных приложениях электропитания, например, таких, как усилители управления движением и градиента для магнитно-резонансной томографии (МРТ), компенсация этих нелинейностей является обязательной, поскольку в системе управления в большинстве случаев используется контур прямой связи.
В документе US2006/208798 A1 описан способ эксплуатации выходного каскада усилителя класса D, который компенсирует нелинейность, вносимую остаточным током нагрузки в течение времени запаздывания при переключении выходного каскада.
Выходной каскад усилителя включает в себя вход, схему генератора стробирующих импульсов, два выходных транзистора, выход и токоизмерительную схему. Транзисторы соединены последовательно между выводами подачи мощности. Когда транзисторы выключены, через них течет остаточный ток нагрузки. Схема генератора стробирующих импульсов увеличивает или уменьшает рабочие циклы сигналов, возбуждающих транзисторы, на основании направления остаточного тока нагрузки, протекающего через транзисторы, тем самым, заставляя рабочий цикл выхода усилителя оставаться, по существу, постоянным и равным рабочему циклу входа усилителя.
Как показано в документе US 2006/208798, точность, которую можно получить за счет использования (только) направления тока нагрузки для компенсации, ограничена. Чтобы получить лучшие результаты, можно использовать подход на основе модели, например, предусматривающий использование справочных таблиц для прогнозирования поведения системы на протяжении интересующего следующего временного цикла. Возможный способ заполнения такой справочной таблицы заключается в повторяющемся моделировании автономного состояния схемы для всех комбинаций вышеупомянутых параметров и сохранении получаемого среднего напряжения в справочной таблице. Подходящую компенсацию моментов переключения можно обнаружить, воспользовавшись записями таблицы и - при необходимости - применяя интерполяцию для нахождения приближения поведения схемы для точной комбинации состояний схемы, которая была измерена контроллером в начале интервала времени управления. Такое решение, в принципе, возможно, но - если его воплотить полностью - потребует значительных ресурсов памяти. Из-за экспоненциального роста количества закономерностей, присущего такому подходу, даже при современном изобилии дешевых запоминающих устройств, такой подход ограничен по точности и количеству переменных состояния, которые можно использовать.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в том, чтобы предусмотреть устройство подачи мощности в переключаемом режиме и соответствующий способ, которые дают возможность эффективной компенсации нелинейностей, обуславливаемых временем запаздывания и падениями напряжения в переключаемом усилителе мощности устройства подачи мощности в переключаемом режиме.
В первом аспекте настоящего изобретения представлено устройство подачи мощности в переключаемом режиме, содержащее:
переключаемый усилитель мощности для усиления сигнала, подаваемого внешним источником сигнала, и для подачи напряжения нагрузки и/или тока нагрузки на нагрузку, и
блок управления для переключения упомянутого переключаемого усилителя мощности на основании уставки времени, причем упомянутый блок управления выполнен для моделирования поведения переключаемого усилителя мощности путем прогнозирования среднего напряжения нагрузки и/или тока нагрузки, по меньшей мере, двух, а в частности - множества уставок времени для желаемого напряжения нагрузки и/или тока нагрузки на основании информации состояния, описывающей текущее состояние переключаемого усилителя мощности.
В дополнительном аспекте настоящего изобретения представлено устройство, содержащее нагрузку, запитываемую напряжением нагрузки и/или током нагрузки, причем упомянутое устройство содержит:
нагрузку, запитываемую напряжением нагрузки и/или током нагрузки, и
устройство подачи мощности в переключаемом режиме, предлагаемое в соответствии с настоящим изобретением, для подачи напряжения нагрузки и/или тока нагрузки на нагрузку.
Предпочтительные варианты осуществления изобретения охарактеризованы в зависимых пунктах формулы изобретения. Будет ясно, что заявляемый способ и заявляемое устройство имеют сходные и/или идентичные предпочтительные варианты осуществления применительно к заявляемому устройству подачи мощности в переключаемом режиме, охарактеризованные в зависимых пунктах формулы изобретения.
В изобретении предложен альтернативный подход к надежной компенсации нелинейностей, обуславливаемых временем запаздывания и падениями напряжения в переключаемых усилителях мощности, путем моделирования контура управления в масштабе ускоренного времени. Размеры схем (например, на основе вентильных матриц, программируемых пользователем, FPGAs), необходимых для того, чтобы сделать это, демонстрируют линейный рост с увеличением сложности схем вследствие параллельной обработки, присущей такому воплощению. Выяснилось, что в современных устройствах легко достижимо ускорение с коэффициентом 10. Например, такое воплощение обеспечило бы предсказание следующих 20 микросекунд (типичное значение для цикла управления и/или переключения крайнего изнутри контура управления в вышеупомянутых системах) за 2 микросекунды или менее.
Введение дополнительных признаков схем, представляющих интерес (таких, как температура устройства и/или подробности схем возбуждения) возможно без ущерба для скорости моделирования в той мере, в какой используемое воплощение содержит достаточные ресурсы аппаратных средств.
Сигнал, подаваемый внешним источником сигнала, упоминаемым здесь, может быть сигналом мощности, выдаваемым источником мощности, но обычно представляет собой уставку, которая в типичном случае выдается «ведущим» контроллером на незначительном уровне мощности.
В предпочтительном варианте осуществления, упомянутый блок управления выполнен для выбора уставок времени для управления переключением упомянутого переключаемого усилителя мощности, из уставок времени, используемых для прогнозирования среднего напряжения нагрузки и/или тока нагрузки, путем выбора уставки времени, относящейся к среднему напряжению нагрузки и/или току нагрузки, ближайшему к требуемому напряжению нагрузки и/или току нагрузки.
В соответствии с другим вариантом осуществления, упомянутый блок управления выполнен для определения уставки времени для управления переключением упомянутого переключаемого усилителя мощности путем интерполирования между уставками времени, относящимися к прогнозируемым средним напряжениям нагрузки и/или токами нагрузки, ближайшим к требуемому напряжению нагрузки и/или току нагрузки. Путем такой интерполяции можно получить оптимальную уставку времени.
Упомянутый блок управления предпочтительно содержит схему дискретного управления для определения требуемого напряжения нагрузки и/или тока нагрузки исходя из информации состояния, о текущем состоянии переключаемого усилителя мощности, и уставки. Упомянутая схема дискретного управления, в частности, выполнена для периодической выдачи требуемого выходного напряжения усилителя на основании совокупности уставки и измерительных сигналов.
В еще одном варианте осуществления, упомянутый блок управления выполнен для прогнозирования среднего напряжения питания и/или тока питания для предварительно определенного количества уставок времени, в частности, для количества уставок времени в диапазоне от 2 до 25. Количества от 2 до 25 являются резонными, но возможно также воплощение и в других количествах.
Устройство подачи мощности в переключаемом режиме может дополнительно содержать измерительное средство для измерения упомянутой информации состояния о текущем состоянии переключаемого усилителя мощности, в частности, для измерения внутренних токов и/или напряжений переключаемого усилителя мощности и/или температуры одного или более элементов усилителя мощности и/или устройства подачи мощности. Такие измерительные средства обычно воплощают с помощью широко известных средств, таких, как токоизмерительные элементы, измеряющие напряжение элементы, и т.д. Однако, для тех сигналов, которые трудно получить с помощью широко известных средств, описанных выше, можно также воспользоваться способом прогнозирования, основанным, например, на применении физической модели поведения схемы и/или устройства. Такой подход интересен, в частности, для измерения температуры полупроводниковых переходов, которые почти недоступны для широко известных средств.
Помимо этого, упомянутый блок управления может быть выполнен для высокоточного прогнозирования среднего напряжения нагрузки и/или тока нагрузки для следующего периода переключения. Это особенно важно, если переключаемый усилитель мощности используется в контуре управления с прямой связью.
В практическом воплощении, упомянутый блок управления выполнен для прогнозирования среднего напряжения нагрузки и/или тока нагрузки для последующего интервала времени, в частности, равного циклу управления или находящегося в диапазоне от 1 до 200 мкс, в частности - от 5 до 50 мкс.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
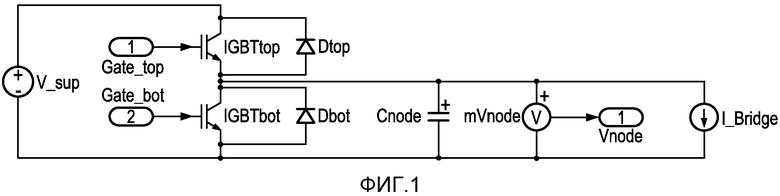
фиг. 1 изображает плечо фазы с постоянной токовой нагрузкой и емкостью переключаемого узла;
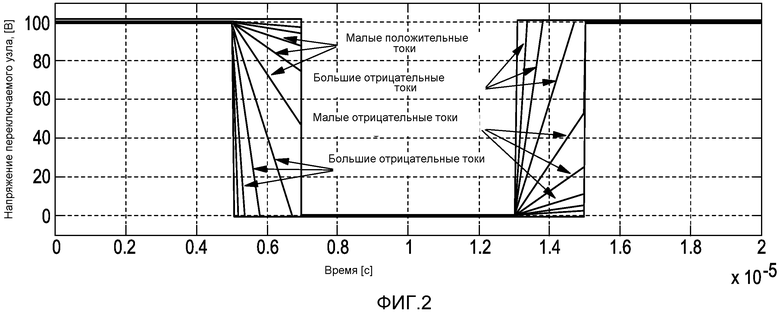
фиг. 2 изображает выключение и включение одиночного плеча фазы для изменения выходных токов;
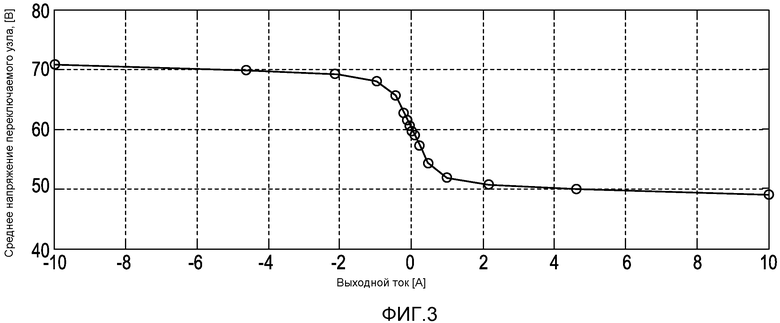
фиг. 3 изображает среднее значение напряжения плеча фазы для изменения выходных токов;
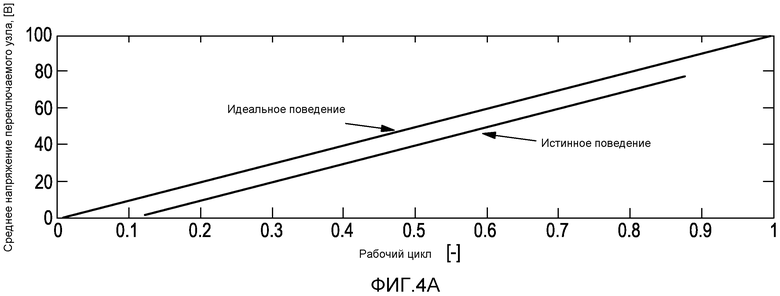
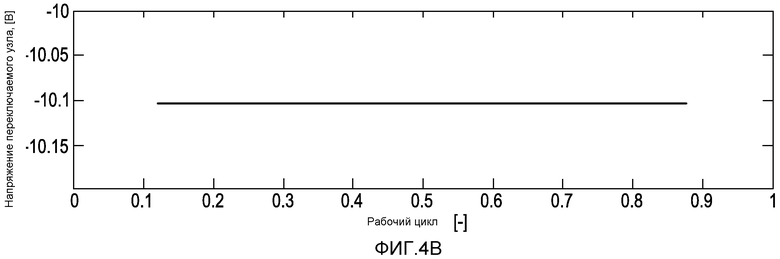
фиг. 4 изображает зависимость среднего напряжения плеча фазы от рабочего цикла для постоянной токовой (5А) нагрузки;
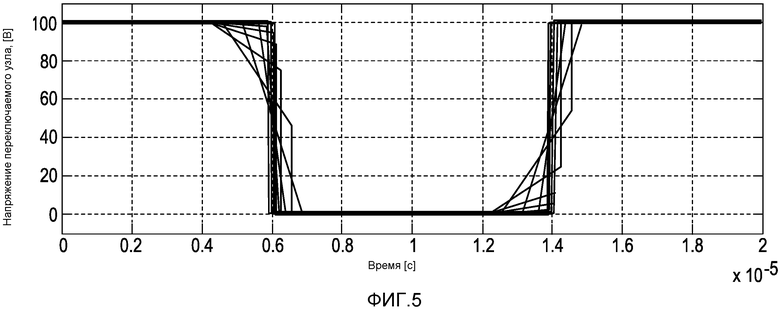
фиг. 5 изображает среднее напряжение плеча фазы с временной компенсацией для обоих краев;
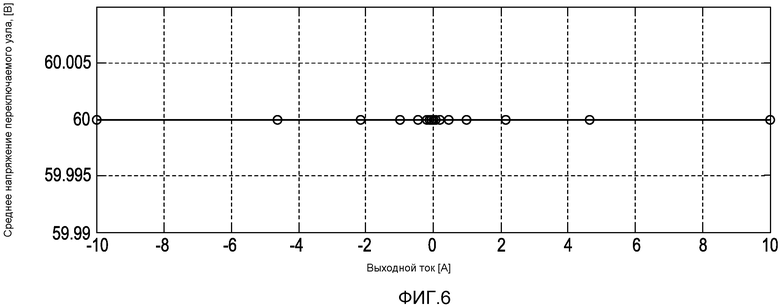
фиг. 6 изображает среднее напряжение плеча фазы после применения компенсации;
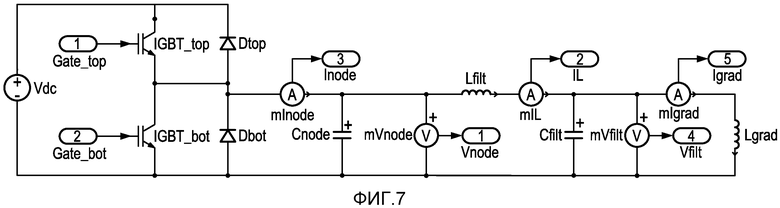
фиг. 7 изображает типичную схему нагрузки для усилителя градиента магнитно-резонансной томографии (МРТ);
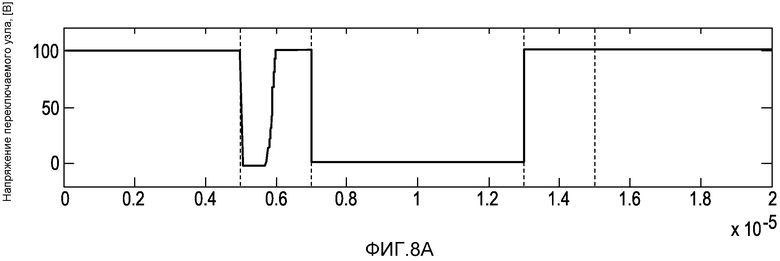
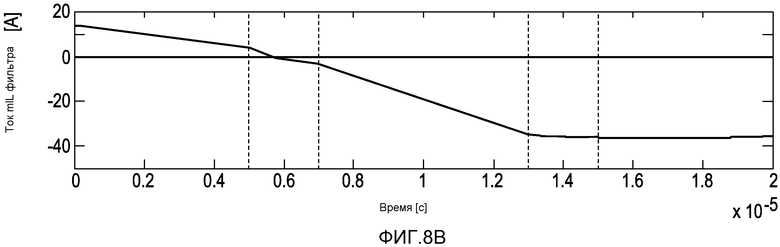
фиг. 8 изображает пример напряжения плеча фазы и тока фильтра с нагрузкой, изображенной на фиг. 7;
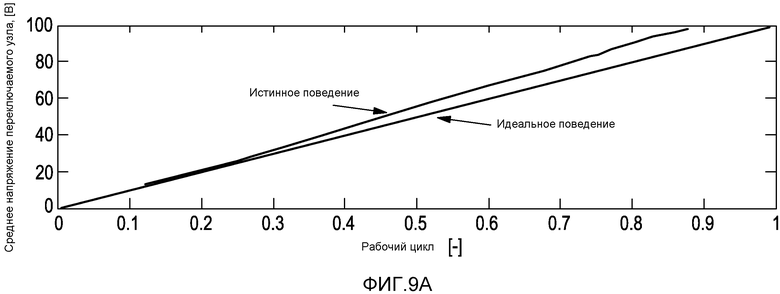
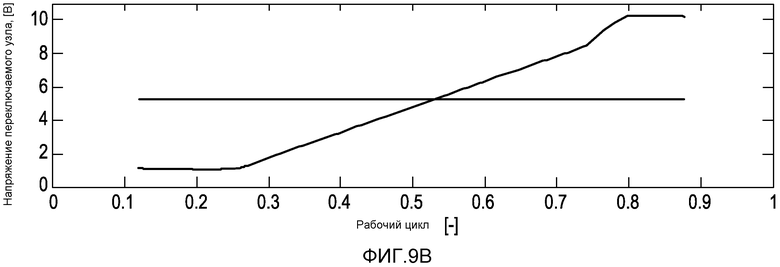
фиг. 9 изображает в увеличенном масштабе зависимость среднего напряжения плеча фазы от рабочего цикла с реалистичной подсоединенной нагрузкой и разницу между истинным и идеальным поведением;
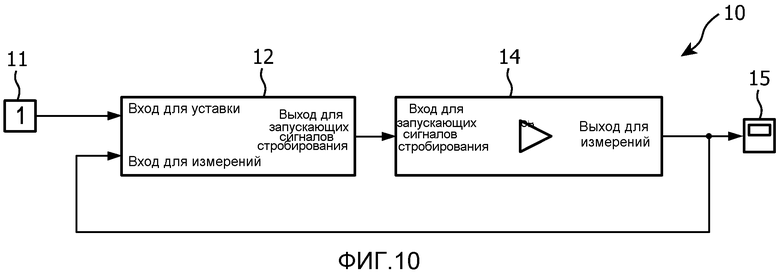
фиг. 10 изображает блок-схему устройства подачи мощности в переключаемом режиме в соответствии с данным изобретением;
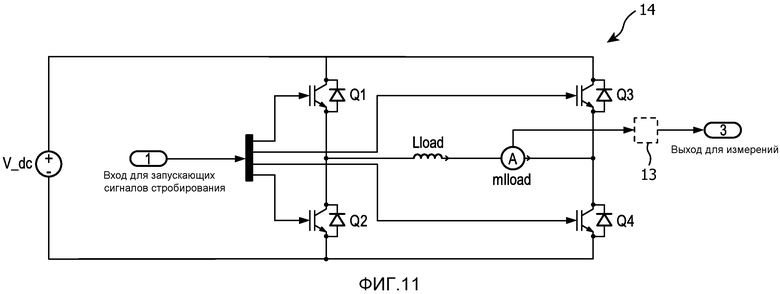
фиг.11 изображает примерный вариант осуществления усилителя мощности.
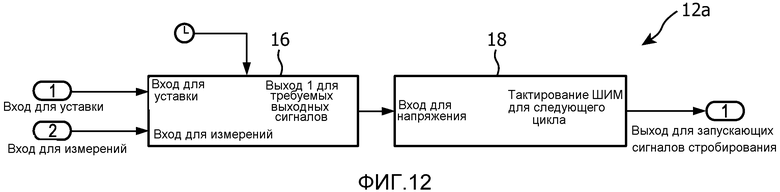
фиг. 12 изображает блок-схему известного варианта осуществления блока управления, обычно применяемого в устройстве подачи мощности в переключаемом режиме;
фиг. 13 изображает блок-схему варианта осуществления блока управления в соответствии с данным изобретением для применения в устройстве подачи мощности в переключаемом режиме, как изображено на фиг. 11,
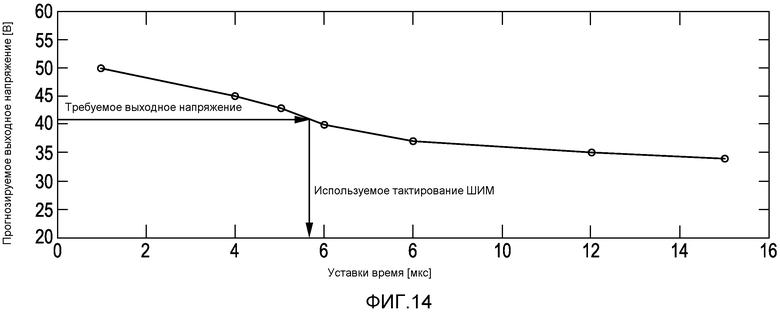
фиг. 14 показан график, изображающий определение уставки времени в соответствии с данным изобретением; и
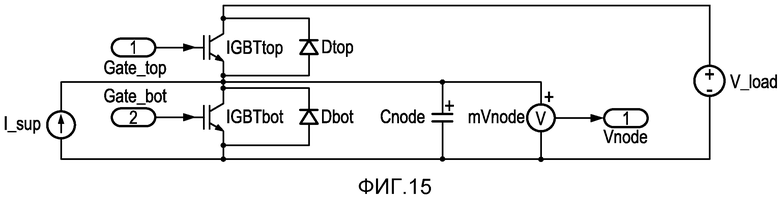
фиг. 15 изображает принципиальную схему усилителя с подачей мощности от источника тока, нагруженного схемой, имеющей характер источника напряжения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ИЗОБРЕТЕНИЯ
Переключаемые усилители мощности часто страдают от нелинейностей из-за поведения переключения выходного каскада. В прецизионных приложениях электропитания, таких, как применяемые для прецизионного управления движением и в градиентной системе устройства магнитно-резонансной томографии (МРТ), компенсация этих нелинейностей обязательна, поскольку в большинстве случаев в системе управления используется контур прямой связи.
Нелинейное поведение обуславливается главным образом ненулевым временем, затрачиваемым на выключение одного полупроводника в плече фазы и включение другого. Обычно между событиями выключения и включения вносится так называемое время запаздывания для создания некоторого допуска на временные различия между разными воплощениями силовых полупроводников, ступенями возбуждения и состояниями схем. В течение времени запаздывания, оба силовых полупроводника выключены, и напряжение в переключаемом узле определяется главным образом выходным током (ходя существенным обычно является также исходное состояние (напряжение) переключаемого узла). Для нагрузки плеча фазы, которая в общем случае будет иметь индуктивный характер, важным является среднее напряжение в течение определенного промежутка времени. Это среднее напряжение также зависит от напряжения переключаемого узла в течение времени запаздывания. Чтобы проиллюстрировать соответствующие явления, на фиг. 1 изображено плечо фазы, выполненное из биполярных транзисторов с изолированными затворами (IGBTs) и диодов.
Плечо фазы запитано напряжением V_sup постоянного тока от источника напряжения и нагружено постоянным выходным током I_bridge от источника тока. Объединенная емкость на переключаемом узле изображена как одиночный конденсатор Cnode. Измерительное устройство mVnode встроено для того, чтобы продемонстрировать определение напряжения переключаемого узла, показанное на последующих чертежах.
В зависимости от знака и величины выходного тока, напряжение на переключаемом узле демонстрирует изменяющееся поведение. Работу схемы промоделировали с использованием разных значений для I_bridge, V_sup=100 В, цикла переключения 20 мкс и Cnode=8 нФ. IGBTs воплощены как идеальные переключатели с последовательно соединенным сопротивлением 100 мОм. Это довольно грубая модель, которая используется лишь для иллюстрации основных явлений, обуславливающих нелинейности. На самом же деле приходится принимать во внимание подробное поведение переключения силовых полупроводников и нелинейности паразитных емкостей устройства, которые представлены на фиг. 1 посредством Cnode. На фиг. 2 представлены формы узла напряжения в зависимости от времени для этого примера.
Моменты времени (включения и выключения) мощных полупроводников заданы так, что используются номинальный рабочий цикл 60% и время запаздывания 2 мкс. Номинальные моменты переключения в этом примере находятся в точках t=6 мкс (переход от высокого уровня к низкому) и t=14 мкс (переход от низкого уровня к высокому). Благодаря времени запаздывания, реальное переключение может иметь место раньше или позже на 1 мкс, т.е. на 50% интервала времени запаздывания, как изображено на фиг. 2. В результате, напряжение переключаемого узла в течение интервала времени запаздывания, а значит - и среднее значение этого напряжения по циклу переключения, зависит от знака и величины выходного тока. Эта зависимость показана на фиг. 3.
В этом примере, наиболее значительное изменение среднего напряжения (т.е., размах почти 20 вольт между значениями -2 A и +2 A выходного тока) обуславливается временем запаздывания. Кроме того, для тех значений тока, которые больше, можно наблюдать конечный наклон. Этот наклон обуславливается главным образом падением напряжения из-за резистивного поведения силовых полупроводников, причем влияние коммутации напряжения тоже присутствует, но при токе свыше нескольких ампер в этом примере оно гораздо меньше, чем влияние резистивного падения напряжения.
Падение или подъем среднего напряжения узла, как изображено на фиг. 3, можно компенсировать путем регулирования рабочего цикла стробирующих сигналов, которые возбуждают силовые полупроводники. Как изображено на фиг. 3, можно использовать табличные значения для изменения моментов времени событий переключения таким образом, что корректируется среднее напряжение переключения для интервала (т.е. 20 мкс), рассматриваемого в этом примере. Необходимую величину коррекции (времени) можно найти путем оценки зависимости среднего напряжения переключаемого узла от рабочего цикла. Для случая нагрузки постоянного тока 5 A, это изображено на фиг. 4.
В этом случае, разница между истинным и идеальным поведением, как изображено на фиг. 4B, не зависит от рабочего цикла. Отсюда следует, что компенсацию можно легко найти, поскольку график для истинного поведения (изображенный на фиг. 4A) представляет собой прямую линию. Для этого случая, единственным измеряемым значением, необходимым для компенсации, является значение выходного тока.
Форма напряжения переключаемого узла после применения компенсации изображена на фиг. 5. В примере согласно фиг. 5 не только компенсировано среднее напряжение плеча фазы, но и отрегулирована синхронизация отдельных фронтов, так что «центр тяжести» полной волны напряжения переместился в t=10 мкс.
Другой способ поиска такой компенсации заключатся в том, что первую (время от 0 до 10 мкс) и вторую (время от 10 до 20 мкс) половины интервала времени обрабатывают индивидуально. Для фронтов сигнала напряжения, которые проделывают весь путь от 0 до 100 В или наоборот по прямой линии, линии на фиг. 5 ясно изображают, что в этом примере точка на полпути фронта лежит точно в положении 50 В. Для фронтов, которые выполнены из двух сегментов, ситуация сложнее, так как «центр тяжести» этих фронтов также переходит в требуемые положения t=6 мкс и t=14 мкс соответственно.
Для изображенных здесь случаев, компенсация может привести к почти совершенным результатам, причем с точностью до нескольких милливольт можно реализовать значение уставки, составляющее 60 вольт. Результирующее среднее напряжение плеча фазы изображено на фиг. 6.
Если с плечом фазы соединена схема «активной» нагрузки, ситуация усложняется, потому что выходной ток теперь включает в себя пульсацию и таким образом изменяется во времени. Типичный ток нагрузки, используемый в градиентной цепи сканера МРТ, изображен на фиг. 7.
Схема нагрузки содержит дроссель Lfilt фильтра, конденсатор Cfilt фильтра и градиентную катушку Lgrad. Как правило, дроссель фильтра имеет индуктивность, составляющую приблизительно 5% индуктивности градиентной катушки. Как изображено на фиг. 1, в схему добавлены измерительные устройства для указания происхождения сигналов, изображенных на последующих чертежах.
Что касается нижеследующих примеров, то схема сконфигурирована со следующими возможными параметрами:
Для простоты, потерями (т.е. на последовательном сопротивлении) в фильтре и градиентных катушках в этой приближенной модели пренебрегали, и эти уставки не предназначены для отражения обычной рабочей точки для существующего градиентного усилителя.
В частности, когда ток фильтра (mIL на фиг. 7) проходит через ноль, среднее напряжение переключаемого узла, вырабатываемое в течение следующего цикла управления, трудно спрогнозировать аналитически. Пример такой ситуации изображен на фиг. 8. В этом примере, ток катушки, изображенный на фиг. 8B, проходит через ноль в течение первого интервала времени запаздывания. В результате, напряжение узла, изображенное на фиг. 8A, демонстрирует импульс значительной ширины (примерно 1,8 мкс).
Рост напряжения переключаемого узла во времени зависит от всех исходных значений состояний схемы (Vnode, Ifilt, Vfilt, Igrad), напряжения питания и моментов переключения обоих силовых полупроводников, т.е. от числа параметров (например, семи). Кроме того, могут оказаться полезными рабочие температуры нескольких элементов схемы (таких, как четыре силовых полупроводника и двух индукторов, изображенных в этом варианте осуществления). Благодаря получающейся сложности схемы, аналитическое решение сетевой задачи неосуществимо. По прежнему, чтобы исключить нелинейности схемы, желательно спрогнозировать среднее напряжение переключаемого узла на следующем интервале, представляющем интерес.
Такое регулирование оказывается прямо следующим для случая с нагрузкой постоянного тока, описанной выше в связи с фиг. 1. В этом случае, среднее значение напряжения переключаемого узла демонстрирует линейную зависимость от рабочего цикла, причем наклон определяется напряжением V_sup питания, как изображено на фиг. 4. Поэтому необходимая коррекция рабочего цикла равна отношению моделируемого падения или подъема напряжения к напряжению питания, с результатом, изображенным на фиг. 6.
Вместе с тем, в случае более реалистичной схемы нагрузки, поиск компенсации не является тривиальной проблемой, поскольку - из-за более сложных сигналов, как изображено на фиг. 8, - среднее значение напряжения переключаемого узла больше не демонстрирует линейную зависимость от рабочего цикла. Фактически, это значение сложным образом зависит от всех состояний схемы и моментов переключения. В качестве примера, отметим, что среднее напряжение плеч фазы для одной конкретной исходной ситуации (такой же, как используемая для фиг. 8) рассчитано посредством моделирования для диапазона значений в течение рабочего цикла. Результаты изображены на фиг. 9, причем на фиг. 9A изображены графики для истинного и идеального поведения среднего напряжения переключаемого узла, а на фиг. 9B в увеличенном масштабе показана разница между истинным и идеальным поведением.
Как и прежде, истинное поведение и идеальное поведение в данном случае существенно отличаются, но теперь - нелинейным образом. Это усложняет коррекцию рабочего цикла таким образом, чтобы можно было получить требуемое среднее напряжение.
На фиг. 10 изображена условная блок-схема общей компоновки устройства 10 подачи мощности в переключаемом режиме. Контроллер 12 получает из внешнего источника 11 сигнала как входа системы уставку, отображающую требуемое выходное напряжение или ток, и требуемые измерительные сигналы, измеренные на выходе усилителя 14 мощности, причем упомянутые измерительные сигналы отображают ток (токи) и/или напряжение (напряжения), которые надлежит воспроизвести аналогично уставке. То, какие сигналы нужно измерить, зависит от множества вариантов выбора, таких, как требуемая точность и подробности схемы питания. В нижеследующем тексте делается допущение, что измеряются состояния схемы, связанные с энергоаккумулирующими элементами схемы (т.е. напряжения конденсаторов и токи индукторов), но возможны и другие варианты выбора.
Контроллер 12 использует информацию о сигнале уставки и фактических измерительных сигналах для управления переключением мощных полупроводников, предусмотренных в усилителе 14. Усилитель 14 мощности содержит силовую схему и силовые полупроводники для генерирования желаемого выходного сигнала (сигналов) на основе входных управляющих сигналов. Выходной сигнал (сигналы) обычно представляют собой напряжение нагрузки и/или ток нагрузки, которые выдаются на внешнюю нагрузку 15.
Возможный вариант осуществления усилителя 14 мощности изображен на фиг. 11. Эту схему можно использовать в качестве усилителя тока. Ток, текущий через нагрузочную катушку Lload, представляет собой управляемую переменную. В нижеследующем рассмотрении эта конкретная схема будет использоваться в качестве примера усилителя мощности, но следует понимать, что данное изобретение применимо также к другим усилителям мощности, в которых используются другие схемные конфигурации (топологии).
На фиг. 12A изображен известный вариант осуществления контроллера 12a. Контроллер 12a содержит схему 16 дискретного управления и модулятор в режиме широтно-импульсной модуляции (ШИМ-модулятор), обозначенный позицией 18, который преобразует желаемое напряжение в тактовые сигналы. Схема 16 дискретного управления использует комбинацию уставки и измерительных сигналов для периодической выдачи требуемого среднего выходного напряжения (для следующего цикла или интервала времени работы) усилителя 14. Для получения желаемого результата, внутри схемы дискретного управления обычно используется комбинация обычного управления и управления с обратной связью. Такая схема дискретного управления описана, например, в “Control Systems Engineering” («Проектирование систем управления») by Norman S. Nise, John Wiley & Sons, так что подробности этой схемы здесь поясняться не будут. Важной чертой здесь является то, что управление дискретно. Дискретизация влечет за собой получение данных в определенных случаях, в большинстве случаев - на фиксированной частоте.
Благодаря дискретизации, информация об измерениях «между» моментами дискретизации недоступна, и все действия (в этом контексте - принятие решений о событиях переключения) для этого необходимо предпринимать на основании «старой» информации.
Метод, используемый модулятором в общем случае известен, а его описание можно найти, например, по адресу http://en.wikipedia.org/wiki/Pulse-width_modulation и в “Pulse width modulation для power converters: principles и practice” («Широтно-импульсная модуляция для преобразователей мощности: принципы и практика») by D. Grahame Holmes, Thomas A. Lipo, T. A. Lipo, Wiley-IEEE, 2003.
Данное изобретение посвящено функционированию ШИМ-модулятора 18, изображенного на фиг. 12. Как пояснялось выше, среднее напряжение, вырабатываемое усилителем 14, зависит не только от тактирования ШИМ, но и от условия нагрузки, в частности, действующего постоянного тока, как изображено на фиг. 3. Для более сложных схем нагрузки, поведение схемы может отклоняться от требуемого случая еще больше, как изображено на фиг. 9.
Чтобы получить преобразование к тактированию ШИМ, которое даст требуемое напряжение с большей надежностью, контроллер 12a, как изображено на фиг. 12, модифицируют так, как изображено на фиг. 13, где иллюстрируется вариант осуществления контроллера 12b в соответствии с данным изобретением, который можно использовать в качестве контроллера 12, показанного в устройстве 10 подачи мощности, изображенном на фиг. 10.
Схема 20 дискретного управления, по существу, идентична схеме 16 дискретного управления контролера 12a, но ШИМ-модулятор 18 заменен моделирующим блоком 22 и интерполятором 24. Схема 12b управления работает следующим образом.
Непосредственно после того, как схема 20 дискретного управления 20 закончила вычисление требуемого выходного напряжения, это значение вместе с замерами всех уместных сигналов схемы питания (в большинстве случаев эти сведения будут содержать полную или частичную «информацию состояния», т.е. сигналы, связанные с энергоаккумулирующими элементами схемы, которые выдаются через вход «для измерения», используются моделирующим блоком 22 при ускоренном моделировании (причем определение «ускоренное» употребляется здесь для того, чтобы указать, что результат моделирования для полного цикла управления уже готов до прохождения цикла управления в реальном времени) для прогнозирования среднего выходного напряжения усилителя 14 мощности для множества уставок времени, условно обозначенных буквами A, B, ..., Z на фиг. 13. То, сколько этих уставок времени необходимы на самом деле, зависит от требуемой точности и подробностей усилителя мощности. По выбору, вход «in_U» моделирующего блока 22 можно использовать для ограничения количества уставок времени, например, путем использования предварительных знаний о максимальном отклонении от «идеального» ШИМ-модулятора, вкратце описанного выше.
На принципиальной схеме согласно фиг. 13, таймер Clock_minus_sim_delay вырабатывает сигнал переключения времени «задержки ускоренного моделирования» перед синхроимпульсом, определенным в ранее стоящем контроллере. Таким образом, выходной сигнал последнего представляет собой в точности исходный синхроимпульс. Сведения со «входа для измерения» (т.е. «информация состояния») содержат сигналы схемы (включающие в себя напряжение (напряжения) питания), некоторые из которых можно предсказывать, а не измерять.
Усилитель 14 мощности предпочтительно снабжен устанавливаемыми по выбору датчиками 13 (как схематически изображено на фиг. 11) для выдачи всех этих сигналов схемы. В реальной конструкции предпочтительно следует использовать как можно меньше датчиков, но эта возможность здесь зависит от требуемой точности, доступных вычислительных ресурсов и подробностей схемы.
Среднее выходное напряжение прогнозируют для множества уставок времени. Существуют различные возможности, исходя из которых можно устанавливать уставки времени. Наиболее грубый и ресурсоемкий подход мог бы обеспечить генерирование фиксированного количества уставок времени (которые можно было бы «зашить» в блоке 22 «ускоренного моделирования») и вычисление результирующих напряжений.
Для экономии ресурсов, в другом варианте осуществления также можно было бы вычислить напряжения только для меньшего набора этих уставок времени с помощью предварительных знаний применительно к требуемому напряжению, для этого назначения может быть использован вход In_U. Возможности в этом случае опять зависят от требуемой точности и деталей схемы. Например, для исходной схемы (фиг. 1) весьма вероятно, что достаточно будет двух моментов тактирования, поскольку зависимость напряжения от времени является почти линейной. Для схемы, изображенной на фиг. 7, вероятно потребуется больше моментов тактирования, но все равно в этом примере накладно проводить заблаговременное моделирование для моментов времени около точки, равной 0,1 рабочего цикла, если необходимо среднее напряжение 80 В. Например, ускоренное моделирование можно проводить лишь для нескольких точек, соответствующих интервалу [0,6 ... 0,8] рабочего цикла.
Выходной сигнал моделирующего блока включает в себя некоторое количество прогнозируемых выходных напряжений, по одному значению для каждой уставки времени. В интерполяторе 24 эта информация используется для получения оптимальной уставки времени, которая, когда ее применяют к усилителю 14 мощности, будет способствовать генерированию требуемого выходного напряжения. Этот процесс изображается на фиг. 14.
Фиг. 14 изображает график выходного сигнала моделирующего блока, в частности, зависимость прогнозируемого выходного напряжения от уставок времени, в этом случае - для уставок времени [1 4 5 6 8 12 15] мкс. Если, например, схема 20 дискретного управления предписывает среднее напряжение 41 В, то соответствующую оптимальную уставку времени находят посредством интерполяции, как изображено стрелками на фиг. 14. Результат в этом примере может быть равным t=5,67 мкс.
Эту уставку теперь можно применить к запускающим сигналам стробирования усилителя 14 мощности, и - в зависимости от подробностей и точностей модели для имитационного моделирования и моментов тактирования, выбранных на графике, изображенном на фиг. 14, - можно воспроизводить требуемое выходное напряжение с высокой точностью.
Таким образом, вариантом осуществления данного изобретения является моделирование схемы аппаратных средств в масштабе ускоренного времени. Пользуясь самой последней информацией об измерениях в системе, в частности - на выходе усилителя мощности, моделирование схемы проводят с использованием модели поведения (схемы). Эта модель может быть либо аналоговой, либо цифровой, но в нижеследующем тексте рассматривается цифровая версия (FPGA), поскольку она является наиболее гибким решением с учетом современной технологии.
Воплощаемая модель для имитационного моделирования содержит дифференциальные уравнения, получаемые посредством элементарного анализа схем, сочетаемого с изучением подробностей поведения переключения. В качестве примера заметим, что дифференциальные уравнения для схемы, изображенной на фиг. 1, в этом случае - когда оба IGBTs выключены, могла бы быть чем-то вроде d(Vnode)/dt=I_bridge/Cnode. Если любой из IGBT включают, приходится учитывать дополнительные члены из-за сопротивления упомянутого IGBT во включенном состоянии. Эти дифференциальные уравнения затем дискретизируют, используя подходящий временной шаг (шаги) и дискретный решающий блок (для разностных уравнений), который может быть устойчивым для интересующих собственных значений (постоянных времени) в схеме. Этот процесс дискретизации в целом известен в данной области техники и описан, например, в K. Watanabe, D. M. Himmelblau “Analysis of trajectory errors in integrating ordinary differential equations” («Анализ траекторных ошибок при интегрировании обыкновенных дифференциальных уравнений»), Journal of the Franklin Institute, том 314, выпуск 5, ноябрь 1982, стр. 283-321, ISSN 0016-0032.
В качестве примера, предположим, что разностные уравнения можно моделировать с приемлемой точностью посредством временных шагов по 10 нс. Если разностные уравнения, описывающие дискретное поведение, теперь выполняются за 1 нс, что представляется находящимся в пределах достижимости устройств на основе вентильных матриц, программируемых пользователем (FPGA), можно получить результат в 10 раз быстрее (т.е., 10 нс/1 нс) чем в реальном времени. Иными словами, когда прошло 10 длительностей цикла (2 мкс в вышеуказанном примере), достигается оценка среднего напряжения, создаваемого плечом фазы за полный цикл (20 мкс), которую по-прежнему можно корректировать путем регулирования одного или более событий переключения за раз.
Моделирование в этом примере можно было бы провести за 2000 (2 мкс/1 нс) этапов. В заключительном воплощении, в варианте осуществления модели для имитационного моделирования используется изменяемый во времени этап. Моделирования показали, что с помощью подходящего решающего блока с изменяемым шагом можно найти решение, в котором уже используется примерно 1000 этапов, в этом примере - в пределах 1 мкс.
Моделирование обеспечивает среднее напряжение переключаемого узла для определенной уставки рабочего цикла. Чтобы иметь возможность компенсировать это напряжение посредством тактирования переключателя (т.е. уставок времени, как описано выше), нужно найти чувствительность этого напряжения к изменениям тактирования переключателя. Эта чувствительность представляет собой наклон кривых «истинного поведения», как изображено на фиг. 4 и фиг. 9.
Возможный подход заключается в параллельном запуске одновременно двух или более имитационных моделей, пользуясь возмущенными значениями для событий тактирования переключения. В одном варианте осуществления используются несколько идентичных моделей с разными вариантами тактирования переключения, каждый из которых приводит к генерированию одиночного среднего напряжения. Затем их используют в интерполяторе 24 для выборки тактирования, которое должно способствовать воспроизведению требуемого напряжения U_desired. Различия в результатах между моделями являются непосредственным показанием чувствительности среднего напряжения переключаемого узла к изменениям тактирования. Эту чувствительность впоследствии можно использовать для компенсации напряжения. Количество таких запускаемых параллельно моделей, в сущности, ограничено лишь внесением малых целевых коррекций в тактирование.
Данное изобретение проиллюстрировано выше на примерах, основой которых является усилитель, питаемый напряжением и выдающий ток, такой, который часто применятся в приводах, где используются электродвигатели с магнитным возбуждением, и в приложениях, включающих в себя нагрузочную катушку. Вместе с тем, подход, предлагаемый в соответствии с данным изобретением, также жизнеспособен для усилителей мощности, питаемых источником тока и снабженных емкостной нагрузкой, которая на типичной частоте переключения ведет себя подобно источнику напряжения. Упрощенный вариант осуществления такого приложения изображен на фиг. 15, где питание на усилитель подается источником I_sup тока, а схема нагрузки возбуждается как источник V_load напряжения. Как и в предыдущих примерах, предпочтительным является введение интервала времени запаздывания между переключениями двух силовых переключателей IGBTtop и IGBTbot, приводящее к возникновению нелинейностей в токе, подаваемом на нагрузку. Чистый эффект этих нелинейностей и на этот раз можно вычислить путем моделирования схемной модели в масштабе ускоренного времени.
Данное изобретение предпочтительно используется в переключаемых усилителях мощности в приложениях, где применяется управление с опережением в системе управления током или напряжением. Примерами являются усилители градиентного тока для МРТ, усилители управления движением, такие, которые в настоящее время используются в продукции ASML (PAAC, PADC) и Assembléon, и усилители звука, питающие емкостные акустические системы.
Хотя изобретение проиллюстрировано на чертежах и подробно описано в вышеизложенном описании, такую иллюстрацию и описание следует рассматривать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничивается раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут быть понятными и осуществимыми для специалистов в данной области техники, при практическом осуществлении заявляемого изобретения исходя из изучения чертежей, описания и прилагаемой формулы изобретения.
В формуле изобретения, слово «содержащий (ая, ое, ие)» не исключает другие элементы или этапы, а признак единственного числа не исключает множество. Одиночный элемент или иной блок может выполнять функции нескольких элементов или блоков, оговоренных в формуле изобретения. Простой факт, что определенные меры оговорены во взаимно различных пунктах формулы изобретения, не указывает на невозможность использования комбинации этих мер для достижения положительного результата.
Любые ссылочные позиции в формуле изобретения не следует считать ограничивающими объем притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Smart-инвертор для поддержания норм качества электрической энергии в распределительных сетях электроснабжения 0,4 кВ их установленным значениям и интеллектуально-автоматизированная система управления электрическими сетями на базе Smart-инвертора | 2024 |
|
RU2835155C1 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |
| КОМПАКТНЫЙ БЛОК ВОЗБУЖДЕНИЯ, В ЧАСТНОСТИ, ДЛЯ СВЕТОИЗЛУЧАЮЩИХ ДИОДОВ, ИМЕЮЩИЙ ИНТЕГРИРОВАННЫЙ ДВОЙНОЙ ВЫХОД | 2014 |
|
RU2671838C2 |
| Способ широтно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой частоты коммутации | 2017 |
|
RU2661495C1 |
| Устройство для автоматического регулирования режимов реактивной мощности узла нагрузки | 1989 |
|
SU1721704A1 |
| Ч-П ^ . 1^.- . . . —. .пТ[»ЬЬ;;-ПЛ;:. ^1ЁИБЛИС L^-AА. Ф. Третьяков | 1971 |
|
SU290390A1 |
| Способ контроля электромеханического компонента системы автоматизации | 2017 |
|
RU2677702C1 |
| Устройство для автоматического регулирования мощности и частоты параллельно работающих генераторов | 1990 |
|
SU1826106A1 |
| БЕСПРОВОДНАЯ ИНДУКЦИОННАЯ ПЕРЕДАЧА ЭЛЕКТРОЭНЕРГИИ | 2015 |
|
RU2681311C2 |
Изобретение относится к устройству подачи мощности в переключаемом режиме и способу осуществления этого устройства. Достигаемый технический результат - компенсация нелинейностей, обуславливаемых временем запаздывания и падениями напряжения в переключаемом усилителе мощности. Устройство подачи мощности в переключаемом режиме содержит переключаемый усилитель мощности для усиления сигнала, подаваемого внешним источником сигнала, и для подачи напряжения нагрузки и/или тока нагрузки на нагрузку и блок управления для управления переключением упомянутого переключаемого усилителя мощности на основании уставки времени, причем упомянутый блок управления выполнен для моделирования состояния переключаемого усилителя мощности путем прогнозирования среднего напряжения нагрузки и/или тока нагрузки, по меньшей мере, для двух, а в частности - для множества уставок времени для требуемого напряжения нагрузки и/или тока нагрузки на основании информации состояния, описывающей текущее состояние переключаемого усилителя мощности.
3 н.п., 7 з.п. ф-лы, 15 ил.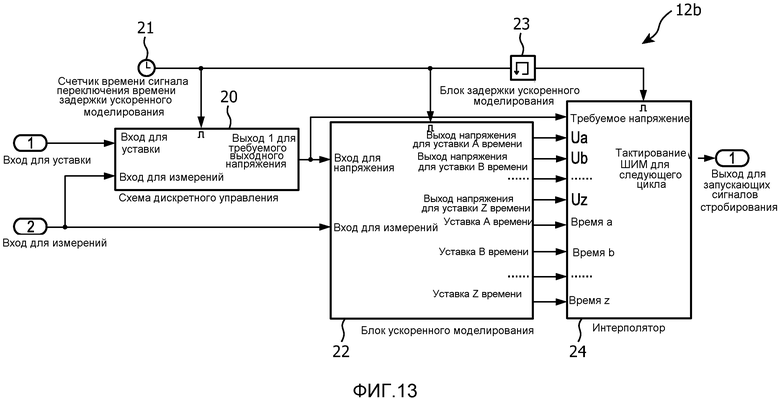
1. Устройство подачи мощности в переключаемом режиме, содержащее переключаемый усилитель мощности для усиления сигнала, подаваемого внешним источником сигнала, и для подачи напряжения нагрузки и/или тока нагрузки на нагрузку, и блок управления для переключения упомянутого переключаемого усилителя мощности на основании уставки времени, причем упомянутый блок управления выполнен для моделирования состояния переключаемого усилителя мощности путем прогнозирования среднего напряжения нагрузки и/или тока нагрузки, по меньшей мере, для двух, а в частности - для множества уставок времени для желаемого напряжения нагрузки и/или тока нагрузки на основании информации состояния о текущем состоянии переключаемого усилителя мощности.
2. Устройство подачи мощности в переключаемом режиме по п. 1,в котором упомянутый блок управления выполнен для выбора уставок времени для управления переключением упомянутого переключаемого усилителя мощности, из уставок времени, используемых для прогнозирования среднего напряжения нагрузки и/или тока нагрузки, путем выбора уставки времени, относящейся к прогнозируемому среднему напряжению нагрузки и/или току нагрузки, ближайшим к требуемым напряжению нагрузки и/или току нагрузки.
3. Устройство подачи мощности в переключаемом режиме по п. 1,в котором упомянутый блок управления выполнен для определения уставки времени для управления переключением упомянутого переключаемого усилителя мощности путем интерполирования между уставками времени, относящимися к прогнозируемым средним напряжениям нагрузки и/или токам нагрузки, ближайшим к требуемым напряжению нагрузки и/или току нагрузки.
4. Устройство подачи мощности в переключаемом режиме по п. 1,в котором помянутый блок управления содержит схему дискретного управления для определения требуемых напряжения нагрузки и/или тока нагрузки исходя из информация состояния о текущем состоянии переключаемого усилителя мощности и точке уставки.
5. Устройство подачи мощности в переключаемом режиме по п. 1,в котором упомянутый блок управления выполнен для прогнозирования среднего напряжения питания и/или тока питания для предварительно определенного количества уставок времени, в частности, для количества уставок времени в диапазоне от 2 до 25.
6. Устройство подачи мощности в переключаемом режиме по п. 1,дополнительно содержащее измерительное средство для измерения упомянутой информации состояния о текущем состоянии переключаемого усилителя мощности, в частности для измерения внутренних токов и/или напряжений переключаемого усилителя мощности, и/или температуры одного или более элементов усилителя мощности и/или устройства подачи мощности.
7. Устройство подачи мощности в переключаемом режиме по п. 1,в котором упомянутый блок управления выполнен для прогнозирования среднего напряжения нагрузки и/или тока нагрузки для следующего периода переключения.
8. Устройство подачи мощности в переключаемом режиме по п. 1, в котором упомянутый блок управления выполнен для прогнозирования среднего напряжения нагрузки и/или тока нагрузки для последующего интервала времени, в частности, равного циклу управления или находящегося в диапазоне от 1 до 200 мкс, в частности от 5 до 50 мкс.
9. Способ подачи мощности в переключаемом режиме, содержащий этапы, на которых: усиливают сигнал, подаваемый внешним источником сигнала, и подают напряжение нагрузки и/или ток нагрузки на нагрузку посредством переключаемого усилителя мощности, и управляют переключением упомянутого переключаемого усилителя мощности на основании уставки времени посредством моделирования состояния переключаемого усилителя мощности путем прогнозирования среднего напряжения нагрузки и/или тока нагрузки, по меньшей мере, двух, а в частности множества уставок времени для требуемого напряжения нагрузки и/или тока нагрузки на основании информации состояния о текущем состоянии переключаемого усилителя мощности.
10. Устройство, содержащее нагрузку, запитываемую напряжением нагрузки и/или током нагрузки, причем упомянутое устройство содержит: нагрузку, запитываемую напряжением нагрузки и/или током нагрузки, и устройство подачи мощности в переключаемом режиме по п. 1 для подачи напряжения нагрузки и/или тока нагрузки на нагрузку.
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ В ПИТАЮЩЕЙ СЕТИ | 2005 |
|
RU2292627C1 |
| КОММУТАТОР И УСТРОЙСТВО ДЛЯ ПИТАНИЯ НАГРУЗКИ ЗНАКОПЕРЕМЕННЫМ НАПРЯЖЕНИЕМ НА ЕГО ОСНОВЕ | 2002 |
|
RU2212729C1 |
| JP 2008259090 A, 23.10.2008 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

