В общем случае настоящее изобретение относится к датчикам движения.
Предпосылки к созданию изобретения
Датчики движения используются в охранных системах для обнаружения движения в контролируемом пространстве. Один тип датчиков - это пассивные инфракрасные датчики движения (далее ПИК датчики движения), которые обнаруживают изменения в дальней инфракрасной зоне излучения (диапазон длин волн - 8-14 мкм) за счет разницы температур между объектом (например, человеком) и окружающей его средой. Обычно при обнаружении датчики движения передают сигнал на командный пульт, который, в свою очередь, активизирует сигнал тревоги о проникновении, изменяет освещение в комнате, открывает дверь или выполняет другую функцию.
Одним из путей, обеспечивающих возможность обнаружения движения, является установка инфракрасной камеры. Движение в контролируемом пространстве может быть легко отслежено путем просмотра записей камеры. Однако такие камеры достаточно дорогие. Поэтому возникает потребность в простых, относительно недорогих ПИК датчиках движения, использующих, например, пироэлектрические детекторы. Поскольку детекторы могут составлять значительную часть стоимости (5-10%) типичного ПИК датчика движения, то большинство ПИК датчиков движения содержат только один или два подобных детектора.
Для того чтобы контролировать большое пространство с помощью только одного или двух детекторов, типичный ПИК датчик движения разрабатывается с многочисленными оптическими компонентами (например, линзами и зеркалами). Каждый компонент такой “составной оптики” фокусирует инфракрасное излучение от объекта внутри соответствующей части контролируемого пространства (далее подпространства) в изображение, формируемое перед детекторами. Контролируемые подпространства могут чередоваться неконтролируемыми подпространствами таким образом, что излучающая цель (например, человек), перемещаясь из подпространства в подпространство, вызывает появление на детекторе образа в виде “излучение цели / излучение фона / излучение цели”. В случае появления людей такой образ вызывает изменение инфракрасного (ИК) излучения на детекторе.
Несмотря на свою эффективность, бывают случаи, когда простые ПИК датчики, использующие минимальное число детекторов, могут время от времени генерировать ложные сигналы тревоги, например, при случайном излучении с длиной волны за пределами диапазона 8-14 мкм. Такие ложные тревоги, однако, могут приводить к ситуациям, в которых сотрудники охраны вынуждены совершать ненужные действия. Соответственно, для уменьшения вероятности ложных тревог в датчики были добавлены оптические фильтры в виде детекторных окон для экранирования белого и ближнего ИК света. Также были добавлены покрытия (в случае зеркал) и добавки (для линз) для предотвращения фокусировки белого и ближнего ИК света на детекторы, чтобы уменьшить возможность ПИК датчиков движения выдавать ложные сигналы тревоги, например, в случае освещения пространства фарами автомобиля через витрины/окна.
Для дальнейшего снижения шанса ложной тревоги детекторы могут включать пару элементов одинакового размера с противоположной полярностью. Не сфокусированное, внеполосное излучение одинаково попадает на оба элемента, что вызывает появление сигналов от одинаковых по размеру и противоположных по полярности элементов, которые практически нейтрализуют друг друга. Более того, одинаковые элементы противоположных полярностей также снижают ложные тревоги от ударов и изменений температуры. Кроме того, как описано, например, в Патенте США No.6163025 две пары элементов могут быть отделены слоями друг от друга и раздельно соединены для генерации сигналов движения, которые смещены друг относительно друга по времени. Это способствует дифференциации движущихся целей на неподвижном фоне, но, с другой стороны, является источником проблем, например, для белого света переменной интенсивности.
Однако вычислительные требования для обработки сигналов с временной сдвижкой в Патенте США No.6163025 являются существенными. Поэтому существует потребность в снижении ложных тревог в простых ПИК датчиках за счет минимизации требований к обработке сигналов. Более того, признается желательным, чтобы простые ПИК датчики были в состоянии отличать небольшие двигающиеся цели, например животных, от больших целей, таких как люди, таким образом, чтобы сигнал тревоги активизировался только в случае присутствия людей, а не животных. Настоящее изобретение нацелено на решение одного или нескольких указанных недостатков.
Краткое изложение изобретения
В общем случае настоящее изобретение совершенствует пассивный инфракрасный датчик движения. Усовершенствования осуществляются за счет ослабления помех (интерференции), и/или определения направления движения, и/или ослабления/браковки сигналов, исходящих от движущихся животных, по размеру значительно меньшему, чем человек.
По первому аспекту изобретения усовершенствованный оптоэлектронный датчик системы выдает сигналы двух разных частот как реакцию на движение человека. Система выдает только одночастотные сигналы, в случае реакции на раздражители типа белый свет, удар, изменение температуры, радиочастотного электромагнитного излучения и т.п. Сигналы от датчика поступают в систему обработки сигналов, которая по наличию или отсутствию двух различных частот распознает отличия между движущимися объектами и недвижущимися источниками помех. Таким образом, усовершенствованный датчик имеет более низкую вероятность реакции, указывающую на движение, которое вызвано не движущимся объектом, а источником помех. В дальнейшем в таких случаях используется термин “ложная тревога”, чтобы отличать случаи реакции датчика на проникновение человека. Более того, датчик может определять направление движения путем сравнительной оценки пиков форм графиков волн между сигналами разных частот так, чтобы датчик мог быть использован, например, для открывания двери, только если человек приближается к ней с определенного направления.
По второму аспекту изобретения усовершенствованная оптоэлектронная система датчика выдает множественные сигналы от двухмерных матриц подпространств внутри контролируемого датчиком пространства. Система обработки сигналов с датчиков использует эти сигналы в качестве информации о размере движущейся цели, способствуя отбраковке сигналов, исходящих при движении небольших животных, а не людей. При необходимости оба отличия могут быть объединены для получения результата, при котором датчик будет усовершенствован по всем трем указанным показателям.
В соответствии с первым существенным отличием ПИК датчик движения включает первый ИК детектор, который выдает первый сигнал с первой частотой во время движения цели в пространстве, контролируемом первым детектором. Второй ИК детектор выдает второй сигнал с другой/второй частотой во время движения цели в пространстве, контролируемом вторым детектором, а система обработки получает первый и второй сигналы и выдает сигнал обнаружения движущегося объекта.
В предпочтительном варианте каждый детектор состоит не менее чем из двух элементов, где элементы первого детектора определяют первую величину промежутка между центрами соседних элементов, а элементы второго детектора определяют вторую величину промежутка между центрами соседних элементов. Это может быть достигнуто путем изготовления элементов первого детектора другого размера, нежели элементов второго детектора, и/или конфигурирования первого детектора с другим числом элементов, нежели во втором детекторе.
В одном варианте первый и второй детекторы размещаются на общей основе в едином корпусе. В другом варианте первый и второй детекторы размещаются в отделенных друг от друга корпусах, при этом первый детектор контролирует первый объем пространства, который, по крайней мере, оптически пересекается со вторым объемом пространства, контролируемым вторым детектором.
В предпочтительном варианте первый детектор может иметь, по крайней мере, два ряда элементов с не менее чем двумя элементами в ряду. Подпространство, контролируемое первым детектором, по крайней мере, частично пересекается с подпространством, контролируемым вторым детектором.
С другой стороны, способ распознавания движущегося объекта в контролируемом пространстве от неподвижного объекта, характеризующегося непостоянным излучением, включает получение первой частоты от первого пассивного ИК детектора и получение второй частоты от второго пассивного ИК детектора, при этом первая и вторая частоты не равны между собой. Способ также включает вывод сигнала, указывающего на наличие движущегося объекта только в случае, если первая и вторая частоты получены одновременно. В противном случае сигнал о наличии движущегося объекта не выдается.
В еще одном случае система обработки соединена с первым и вторым ПИК детекторами для вывода сигнала обнаружения только в случае, если сигналы, поступающие от обоих детекторов, имеют отличающиеся друг от друга частоты.
В еще одном случае датчик движения включает первый пассивный ИК детектор, имеющий, по крайней мере, два ряда элементов с не менее двумя элементами в ряду. Первый пассивный ИК детектор контролирует первое подпространство всего общего пространства. Второй пассивный ИК детектор имеет не менее двух рядов с не менее, чем двумя элементами в ряду и контролирует второе подпространство. Оптическая система при этом частично перекрывает первое и второе подпространства.
В предпочтительном варианте реализации первый ИК детектор выводит первый сигнал, представляющий точку или точки в первом измерении, а второй ИК детектор выводит второй сигнал, представляющий точку или точки во втором измерении. Первое измерение может быть измерением по оси "х", второе измерение - измерением по оси "у" в декартовой системе координат. Или эти измерения могут быть ортогональными измерениями, как, например, "r" (полярный радиус) и "Θ" (полярный угол) в полярной системе координат.
Сигналы могут представлять положительную или отрицательную полярности, а система обработки сигналов (процессор) может использовать полярности сигналов для определения направления движения объекта. Также используя сигналы, процессор может измерять текущие координаты для определения, по крайней мере, размера движущегося объекта. В определенных случаях процессор по координатам может определять, превосходит ли объект заданный порог размера объекта, и на основе полученных данных активировать или нет сигнал тревоги.
В другом случае ПИК датчик включает первый детектор, сконфигурированный для вывода сигналов, представляющих, по крайней мере, одну из не менее двух точек вдоль первой оси измерения. Первый детектор получает ИК-излучение из первого подпространства всего контролируемого пространства. Второй детектор сконфигурирован для вывода сигналов, представляющих, по крайней мере, одну из не менее двух точек вдоль второй оси измерения, отличного от первого измерения. Второй детектор получает ИК-излучение из второго подпространства, всего контролируемого пространства, при этом часть второго подпространства частично пересекается с первым подпространством всего контролируемого пространства.
В альтернативном варианте пассивный инфракрасный (ИК) датчик движения имеет первый ИК детектор, выдающий первый сигнал с первой частотой, когда движущийся объект перемещается в области контроля первого детектора, и второй ИК детектор, выдающий второй сигнал со второй частотой, когда движущийся объект перемещается в области, контролируемой вторым детектором, при этом вторая частота отличается от первой. Первый и второй сигналы поступают в систему обработки, и на их основе выдается сигнал обнаружения движущегося объекта. Детекторы имеют одинаковый размер, при этом первый детектор снабжен оптической системой с первым фокусным расстоянием, а второй детектор снабжен оптической системой со вторым фокусным расстоянием, отличающимся от первого.
При желании первый и второй детекторы могут быть размещены в отдельных друг от друга корпусах. При отсутствии ограничений каждый детектор имеет два и только два соответствующих элемента, при этом элементы должны быть одинакового между собой размера и отстоять друг от друга на одинаковом расстоянии (промежутке) как на первом детекторе, так и на втором.
В другом случае последнего варианта способ распознавания движущегося объекта в контролируемом пространстве на фоне неподвижного объекта, характеризующийся непостоянным излучением, включает получение первой частоты от первого пассивного ИК детектора, получение второй частоты от второго пассивного ИК детектора, при этом первая и вторая частоты не должны быть равными. Детекторы имеют одинаковый размер и конфигурацию, но снабжены соответствующими оптическими системами с разными фокусными расстояниями. Способ включает вывод сигнала, представляющего наличие движущегося объекта только в случае, если обе частоты (первая и вторая) были получены одновременно. В противном случае сигнал о наличии движущегося объекта системой не выдается.
С другой стороны, датчик движения включает первый пассивный ИК детектор, имеющий два и только два элемента, определяющих первую величину промежутка между их центрами. Первый пассивный ИК детектор контролирует первое подпространство. Второй пассивный ИК детектор имеет два и только два элемента, определяющих вторую величину промежутка между ними. Вторая величина промежутка между центрами элементов детектора равна первой величине, и все четыре элемента имеют одинаковый между собой размер. Второй пассивный ИК детектор контролирует второе подпространство. Оптическая система имеет одно фокусное расстояние для первого детектора и второе фокусное расстояние для второго детектора. Первое и второе фокусные расстояния не равны друг другу.
Детали настоящего изобретения, как в части его структуры, так и работы, могут быть лучше поняты с помощью прилагаемых чертежей, на которых ссылочные номера соответствуют деталям.
Краткое описание чертежей
На Фиг.1 показана блок-схема системы.
На Фиг.2 представлена принципиальная схема реализации датчика с детекторами разного размера на единой подложке в одном корпусе, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.3 представлена принципиальная схема датчика с двумя детекторами, размещенными в разных корпусах, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.3А представлена принципиальная схема альтернативной реализации второго варианта датчика, показанного на Фиг.3, который имеет такую же функциональную схему, но его детекторы имеют разные размеры, а оптические системы - разные фокусные расстояния, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.4 представлены графики сигналов, генерируемых датчиками, показанными на Фиг.2 и 3.
На Фиг.5 представлена принципиальная схема датчика, в которой детекторы, размещенные в разных корпусах, подключены в ортогональных направлениях, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.6 представлена принципиальная схема другой реализации третьего варианта датчика, в которой детекторы, размещенные в разных корпусах, подключены в ортогональных направлениях, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.7 представлена принципиальная схема датчика, в которой детекторы разного размера, размещенные в разных корпусах, подключены в ортогональных направлениях, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.8 представлена принципиальная схема другой реализации четвертого варианта датчика, в которой детекторы разного размера, размещенные в разных корпусах, подключены в ортогональных направлениях, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.9 представлена принципиальная схема еще одной реализации четвертого варианта датчика, в которой детекторы разного размера, размещенные в разных корпусах, подключены в ортогональных направлениях, показывающая вид сверху на детекторы вместе с условными обозначениями и функциональными схемами датчика.
На Фиг.10 показана логическая блок-схема использования нескольких частот для получения выходного сигнала, представляющего движущийся объект.
На Фиг.11 показана логическая блок-схема использования двухмерных датчиков, показанных на Фиг.5-9, для получения выходного сигнала, представляющего движущийся объект.
Подробное описание изобретения
На Фиг.1 показана общая схема системы 10 для выявления движущегося объекта 12, например, человека. Система 10 включает оптическую систему 14, которая может включать соответствующие зеркала, объективы и другие известные в этой области техники компоненты для фокусирования изображения объекта 12 на пассивную инфракрасную (ПИК) систему обнаружения 16. Представленное ниже изобретение описывает различные варианты реализации ПИК системы обнаружения 16. В ответ на движущийся объект 12 ПИК система обнаружения 16 генерирует сигнал, который может быть подвергнут фильтрации, усилению и аналого-цифровому преобразованию в блоке обработки сигналов 18, который затем передается с систему обработки 20 (например, компьютер или специальный интегрированный под задачу электронный блок), которая определяет, какой из сигналов тревоги 22 (звуковой или визуальный) активизировать, или сигнал передается на другое устройство, например систему активации дверей и т.п., в соответствии с представленными здесь блок-схемами.
Описав общую архитектуру системы, перейдем к Фиг.2, на которой показан первый вариант реализации ПИК датчика согласно настоящему изобретению. Как показано, ИК средство обнаружения для ПИК датчика 24 может содержать одиночную, предпочтительнее керамическую подложку (основу) 26, на которой установлены первый и второй ПИК детекторы 28, 30. В реализации, показанной на Фиг.2, первый детектор 28 состоит из четырех элементов 32 (две пары элементов положительной и отрицательной полярности, электрически подсоединенных друг к другу), а второй детектор 30 состоит из двух элементов 34 (одной пары элементов положительной и отрицательной полярности), в которой каждая пара элементов 32, 34 объединены электрической связью, приблизительно образуя форму буквы "Н". Должно быть понятным, что детекторы 28, 30 на обратной стороне показанной подложки 26 имеют дополнительные компоненты (например, “пластины”, которые будут описаны ниже), которые совместно с компонентами, показанными на Фиг.2, формируют элементы 32, 34. Соединения между пластинами на обратной стороне изображены пунктирными линиями.
Детекторы 28, 30 могут быть выполнены в виде пироэлектрических детекторов, которые измеряют излучение в дальней ИК зоне спектра. Такие детекторы работают на “пьезоэлектрическом эффекте”, который вызывает перемещение электрического заряда при наличии механической деформации. Пироэлектрические детекторы имеют форму конденсатора - две электропроводящие пластины, разделенные диэлектриком. В качестве диэлектрика чаще всего используется пьезоэлектрическая керамика, которая в описании называется “подложкой”. Когда дальнее ИК-излучение вызывает изменение температуры (и таким образом некоторую механическую деформацию) в керамике, электрический заряд перемещается от одной пластины к другой. Если детектор не подсоединен к какой-либо внешней схеме, тогда электрическое напряжение является зарядом “конденсатора”. Если между пластинами имеется соединение с внешней схемой, тогда ток течет.
В соответствии с представленными принципами расстояние dl между центрами смежных элементов 32 первого детектора 28 меньше расстояния d2 между центрами смежных элементов 34 второго детектора 30. Эту разницу можно достичь, как показано на Фиг.2, за счет изготовления элементов 34 второго детектора 30 большего размера, чем элементы 32 первого детектора 28. Это также может быть достигнуто за счет увеличения промежутка между элементами 34 второго детектора по сравнению с промежутком между элементами 32 первого детектора и/или за счет использования меньшего числа элементов 34 во втором детекторе, нежели числа элементов 32 в первом детекторе.
На Фиг.2 представлена функциональная схема детекторов 28, 30 с элементами 32, 34 в соответствии с кратко описанными выше принципами работы пироэлектрического детектора, определяющих взаимные размеры, формы и полярности подпространств, контролируемых датчиком (т.е. проекции размеров, форм и полярностей элементов), показывает, что оба детектора смонтированы на одной подложке 35. Также на Фиг.2 показана принципиальная схема в условных обозначениях, представляющая элементы 32, 34 детекторов 28, 30 как конденсаторы, где точки указывают полярность.
На Фиг.3 показано средство ИК обнаружения для ПИК датчика 35, включающее первый и второй детекторы 36, 38, которые по всем важнейшим характеристикам идентичны конфигурации детекторов 28, 30, показанных на Фиг.2, за исключением того, что каждый детектор 36, 38 смонтирован на своей собственной подложке 40, 42. Подложки 40, 42 могут быть помещены в соответствующие корпуса 44, 46. В соответствии с вариантом, показанным на Фиг.3, оптическая система 14 (Фиг.1) сконструирована так, чтобы два предпочтительно разных подпространства контролировались соответственно детекторами 35, 38 таким образом, чтобы два подпространства оптически пересекались между собой с обратной стороны оптических компонентов. По существу, комбинации оптических компонентов составной оптической системы выбираются таким образом, что оба подпространства, контролируемые детекторами, имели пересекающуюся часть.
В отличие от варианта реализации, показанной на Фиг.2, датчик, показанный на Фиг.3, выдает двухчастотный сигнал независимо от размера изображения за счет полного функционального перекрытия неодинаковых по размеру элементов. Таким образом, устройство менее зависимо от размеров объекта для генерации обнаружения по сравнению с датчиком, показанным на Фиг.2, который требует, чтобы объект был достаточно большим, чтобы появиться в обоих контролируемых подпространствах.
Фиг.3 также включает функциональную схему, иллюстрирующую соотношения размеров и взаимное расположение продольных сечений двух контролируемых подпространств. При желании два комплекта детекторов могут быть соединены друг с другом для выдачи комбинированного сигнала, который уменьшит число требуемых усилителей в датчике, что по стоимости будет сравнимо со стоимостью дополнительной обработки по разделению двух частот.
На Фиг.3А показан дополнительный вариант сборки детектора, который обеспечивает такую же функциональность, что и детектор, представленный на Фиг.3. ПИК датчик 35а включает первый и второй детекторы 36а, 38а, которые по всем важнейшим характеристикам идентичны по размерам и конфигурации друг другу, в котором каждый детектор 36а, 38а смонтирован на своей собственной подложке 40а, 42а. Подложки 40а, 42а могут находиться в соответствующих корпусах 44а, 46а. Каждый детектор 36а, 38а имеет, как показано, два и только два элемента (плюс и минус), и все четыре элемента, показанных на Фиг.3А, имеют одинаковый размер и отстоят друг от друга на первом детекторе 36а так же, как и отстоят друг от друга элементы на втором детекторе 38а.
В соответствии с реализацией, показанной на Фиг.3а, детекторы 36а, 38а снабжены соответствующей оптикой в оптической системе 14, которая имеет разное фокусное расстояние. В случае соотношения фокусных расстояний, например, в отношении 2:1 оптика выполняется составной, и оптика, связанная с детектором 36а, может иметь в два раза больше оптических элементов, чем оптика, связанная с детектором 38а. Сборка оптики детекторов 36а, 38а осуществляется таким образом, чтобы оба подпространства, контролируемые детекторами, имели пересекающуюся часть.
В отличие от варианта, показанного на Фиг.2, датчик, показанный на Фиг.3, выдает двухчастотный сигнал независимо от размера изображения за счет полного функционального перекрытия неодинаковых по размеру элементов. Таким образом, устройство менее зависимо от размеров объекта для генерации обнаружения по сравнению с датчиком, показанным на Фиг.2, который требует, чтобы объект был достаточно большим, чтобы появиться в обоих контролируемых подпространствах.
На Фиг.4 показаны сигналы, выдаваемые датчиками, показанными на Фиг.2 и 3. Для упрощения будем относить их к детекторам 36, 38, показанным на Фиг.3. Два верхних сигнала 48, 50 в серии сигналов (а) являются выходными сигналами разных элементов второго детектора 38 при наличии движущегося человека. Как показано, частота суммарного выходного сигнала 49 с детектора отличается (в примере показано в увеличенном масштабе) от частоты суммарного выходного сигнала детектора 53. Когда промежуток между центрами элементов имеет соотношение 2:1, частоты выходных сигналов от соответствующих детекторов также будут иметь соотношение 2:1. Более того, первый пик высокочастотного сигнала с первого детектора 49 регистрируется практически одновременно с максимумом позитивного уклона низкочастотной составляющей сигнала с детектора 52 при наличии движущегося объекта. Движущийся объект может быть выявлен путем идентификации этих характеристик (и других сходных последующих характеристик разницы полярностей пика/наклона), как было представлено.
В отличие от первой серии серия сигналов (b) представляет выходные сигналы с детектора при его реакции на различный по интенсивности не сфокусированный белый свет от стационарного источника. Эти сигналы появляются в связи с тем, что отклики от “одинаковых” и противоположных по полярности элементов только грубо нейтрализуют друг друга. В этих обстоятельствах весьма ценным свойством, показанным на Фиг.4, является то, что частоты в суммарных сигналах 57 и 61, соответственно выдаваемые детекторами 36, 38, равны и поэтому просто распознаются в сравнении с двухчастотными сигналами из серии (а), в связи с чем обеспечивается понижение вероятности ложных тревог, возникающих при реакции на разный по интенсивности не сфокусированный белый свет.
Более того, по форме сигналов, генерируемых двумя детекторами 36, 38, может быть определено направление движения объекта 12. Критерием является полярность пиков в формах сигналов. Например, как уже упоминалось выше, на указанной функциональной схеме, представленной на Фиг.3, движущийся объект 12, попадая в зону большего (+) контролируемого подпространства слева, одновременно вызывает (+) положительный наклон формы сигнала от соответствующего элемента детектора и (+) положительный пик сигнала от элемента, соответствующего левой (+) меньшей перекрывающейся зоне подпространства. Продолжая движение в том же направлении внутри большего (+) контролируемого подпространства, цель затем вызывает (+) положительный пик сигнала от соответствующего элемента детектора. Продолжая движение далее внутри того же большего (+) контролируемого подпространства, цель одновременно вызывает (-) отрицательный наклон формы сигнала от соответствующего элемента детектора и (-) отрицательный пик сигнала от элемента, соответствующего правой меньшей пересекающейся зоне подпространства. В вышеупомянутом случае одновременные наклоны и пики сигналов одинаковой полярности указывают на одно направление движения, тогда как наклоны и пики сигналов неодинаковой полярности указывают на противоположное направление движения. Используя описанный выше принцип согласования сигналов, устанавливается направление движения объекта.
Теперь, ссылаясь на Фиг.5, можно показать другой вариант настоящего усовершенствованного ПИК датчика движения. Как показано, средство ИК обнаружения ПИК датчика 64 включает первый детектор 66 и второй детектор 68. Детекторы 66, 68 могут быть смонтированы в разных корпусах. Как показано на виде сверху детектора и на принципиальной схеме с условными обозначениями, первый детектор имеет две пары элементов с двойной полярностью 70, 72, которые соединены вдоль оси х, тогда как второй детектор 68 имеет две пары элементов с двойной полярностью 74, 76, которые соединены вдоль оси у. Каждая пара элементов с двойной полярностью 70-74 образуют последовательность (ряд) элементов. В такой конфигурации первый детектор 66 выдает сигнал, представляющий движение в первом направлении (таком, например, как ось у в декартовой системе координат или радиальное направление в полярной системе координат), а второй детектор 68 выдает сигнал, представляющий движение во втором направлении (таком, например, как ось х в декартовой системе координат или угловое направление в полярной системе координат), которое ортогонально первому направлению.
Согласно изобретению, показанному на Фиг.5, подпространства контролируемого детекторами 66, 68 пространства оптически совмещены (наложены) за счет соответствующей конфигурации оптической системы 14 (Фиг.1). При такой сборке датчик 64, показанный на Фиг.5, устанавливает двухмерную матрицу подпространств, контролируемых пироэлектрическими детекторами, которая формируется путем оптического наложения контролируемых подпространств в результате установки двух детекторов 66, 68 с ортогональным соединением элементов позади оптических компонентов. Другими словами, оптическая система 14 преобразует оба контролируемых детекторами подпространства таким образом, чтобы они занимали единое пространство, как показано на функциональной схеме в виде виртуального комбинированного детектора 78. Движущийся объект может быть распознан на фоне. белого света переменной интенсивности потому, что движение вызывает непрерывный ряд сигналов, генерируемых по обеим осям координатной системы, тогда как белый свет их не генерирует. Иначе говоря, положение в двухмерном пространстве определяется одновременными сигналами от детекторов 66, 68, и когда сигналы, по прошествии времени, указывают на изменение координат, то это и предполагает движение объекта. Система обработки просто коррелирует такие изменения координат, например, для активизации тревоги, когда движение выявлено таким способом.
Можно положительно оценить при изучении виртуального составного детектора 78 на функциональной схеме, на Фиг.5 то, что за счет анализа полярностей сигналов, которые одновременно выдаются с детекторов 66, 68, положение объекта 12 может быть определено в этом случае как подтверждение положения координат, полученных за счет одновременных сигналов от текущего положения объекта. Особенно сигналы с полярностью ++ (два плюс) указывают, что объект находится в верхнем левом квадранте пересекающихся подпространств, где сигналы с полярностью -- (два минус) указывают, что объект находится в нижнем правом квадранте пересекающихся подпространств. С другой стороны, отрицательная полярность сигнала с первого детектора 66, получаемого с положительной полярностью сигнала со второго детектора 68, указывает, что объект находится в верхнем правом квадранте и т.д. Надо отметить, что изложенные выше принципы могут быть применены для матриц большего размера, чем 2×2.
Например, на Фиг.6 показано средство для ПИК датчика 80, которое включает первый и второй восьмиэлементные детекторы 82, 84, которые, за исключением числа элементов, в основном идентичны датчику 64, показанному на Фиг.5. В случае датчика 64 и датчика 80, показанного на Фиг.6, подпространства детекторов 82, 84 оптически пересекаются таким образом, что соответствующие контролируемые подпространства находятся в одном месте, реализуя виртуальный составной детектор 86, показанный на функциональной схеме.
Оба датчика 64, 80, показанных на Фиг.5 и 6, обеспечивают выдачу двух одновременных сигналов (по осям "х" и "у" декартовой системы координат) в то время, когда движущийся объект 12 перемещается через контролируемые подпространства. За один раз объект 12 активизирует одну координату каждого детектора таким образом, что совместное снятие координат сигнала "х" и "у" определяет положение объекта 12. Надо положительно отметить, что датчик 80, показанный на Фиг.6, обладает большей разрешающей способностью, чем датчик 64, показанный на Фиг.5. Более того, если принимать во внимание полярность сигналов, можно добиться дополнительного увеличения пространственного разрешения в соответствии с принципами, изложенными выше.
Оба датчика 64, 80, показанные на Фиг.5 и 6, могут использовать оптическую систему 14, которая масштабирует изображения, похожие по своей форме на людей. Когда объект 12 является человеком, сигналы одновременно выдаются от двух или более (х, у) элементов матрицы, тогда как меньшие объекты, например животные, будут вызывать одновременные сигналы от меньшего числа элементов (х, у). В этом случае число элементов и их положение в матрице, от которых одновременно поступают сигналы, может быть скоррелировано с размером объекта для различения, например, животных от людей и активизации сигнала тревоги при наличии человека или открытии двери только в присутствии человека и т.п.
На Фиг.7 показано, что двухчастотная концепция для датчиков, показанных на Фиг.2 и 3, может быть объединена с концепцией двухмерной матрицы для датчиков, показанных на Фиг.5 и 6, для совместного распознавания движущегося объекта на фоне недвижущихся объектов, основываясь на числе полученных частот, и для определения направления движения, а также выявления движущихся объектов, отличающихся по размеру (по числу одновременно активизированных элементов матрицы). Конкретно, средство ИК обнаружения для датчика 88 может включать первый детектор 90, имеющий элементы 91 одного размера, и второй детектор 92, имеющий элементы 91 другого размера (в данном случае большего), таких, что частота сигнала для движущегося объекта, получаемого с первого детектора 90, отличается от частоты сигнала, получаемого со второго детектора 92. Существенным, как показано на функциональной схеме в виде виртуального составного детектора 94, является то, что датчик 88 устанавливает матрицу 2×2 из контролируемых подпространств, которые оптически формируются путем наложения подпространств, контролируемых детекторами 90, 92. Элементы большего размера 93 выдают сигналы с полярностью по "х" координате, т.е., как показано, сигнал от элемента 93 с отрицательной полярностью указывает на положение справа по координатной оси "х", тогда как сигнал от элемента 93 с положительной полярностью указывает на положение слева по координатной оси "х". Сигнал, вызываемый движением от каждого элемента матрицы, идентифицируется как одновременное местоположение пиков длин волн от элементов, расположенных вдоль оси "х", вместе с вдвое большим числом пиков (за счет удвоения частоты) от элементов, расположенных по оси "у".
На Фиг.8 показано еще одно средство ИК обнаружения для датчика 96, которое включает первый детектор 98, имеющий два ряда по две пары элементов 100 двойной полярности, соединенных вдоль оси "х", для получения сигналов, представляющих координату "у", и второй детектор 102, имеющий два ряда по одной паре элементов 104 двойной полярности, соединенных вдоль оси "у", для получения сигналов, представляющих координату "х". Пары элементов 100 первого детектора 98 меньше по размеру, чем пары элементов 104 второго детектора 102, поэтому частота сигналов, генерируемых первым детектором 98, отличается от частоты сигналов, генерируемых вторым детектором от движущихся объектов. Контролируемые подпространства оптически накладываются друг на друга для формирования виртуального составного детектора 106, показанного на функциональной схеме. Такая двухмерная матрица детекторов обеспечивает большее пространственное разрешение, нежели датчик 88, показанный на Фиг.7.
На Фиг.9 показано средство ИК обнаружения для датчика 108, который по всем основным показателям идентичен датчику 64 на Фиг.5. Он включает первый и второй детекторы 110, 112, имеющих соответствующие элементы 114, 116 одинакового размера и ортогонально соединенных между собой, за исключением того, что датчик 108, показанный на Фиг.9, имеет восемь пар элементов с двойной полярностью на детектор. Элементы 114 первого детектора 110 собраны в виде двух вертикальных рядов, соединенных по оси "у" за счет подключения элемента с отрицательной полярностью пары к элементу с положительной полярностью пары, расположенного непосредственно ниже. С другой стороны, элементы 116 второго детектора 112 собраны в виде двух горизонтальных рядов элементов, соединенных по оси "х" за счет подключения элемента с отрицательной полярностью пары к элементу с положительной полярность пары, расположенного непосредственно слева. Как указано на схеме с условными обозначениями, элементы пар 114, соединенные по оси "у" первого детектора 110, выдают позиционную информацию по оси "х", тогда как элементы пар 116, соединенные по оси "х" второго детектора 112, выдают позиционную информацию по оси "у". При поиске позиционной информации, как показано на функциональной схеме в виде виртуального составного детектора 118, на положение объекта указывает местоположение квадранта в двухмерном пространстве (х=1, у=2), от которых поступают одновременные сигналы, а также точкой 120 за счет полярности сигналов (х = плюс, у = минус). Также движущийся объект выявляется на фоне неподвижного света помехи путем обзора последовательности активированных точек в виртуальном составном детекторе 118.
На Фиг.10 представлен вариант логической блок-схемы использования разных частот от датчиков, показанных на Фиг.2, 3, 7 и 8. Вначале на блок 122 поступают сигналы от двух детекторов, например, в такт. Далее в блоке принятия решения 124 определяется, имеют ли полученные сигналы разные частоты, и если да, то определяется совпадение первого пика сигнала от первого детектора с максимумом уклона графика сигнала от второго детектора. При желании пользователь может задавать другие критерии сравнения пиков и уклонов сигналов. Если определено наличие двух разных частот сигналов и если установлено совпадение пиков/уклонов во времени и/или пики и уклоны совпадают с другим заданным критерием, то выдается сообщение о “движущемся объекте” в блок 126. В противоположном случае выдается сообщение о “недвижущемся объекте” в блок 128.
Очевидно, что под “частотой” здесь понимается не только частота синусоидального по форме сигнала, обычно генерируемого при движении объекта в одном направлении с постоянной скоростью поперек контролируемых подпространств, но также и частота несинусоидальной формы или полусинусоидальной формы сигналов, которые, по существу, появляются в виде импульсов, например, когда человек хаотично движется в разных направлениях и на различных скоростях через контролируемые подпространства. В последнем случае детектор, имеющий меньшее расстояние (промежуток) между центрами смежных элементов, генерирует большее число импульсов в единицу времени, вне зависимости от синусоидальной или несинусоидальной формы сигнала, чем детектор, имеющий большее расстояние между центрами смежных элементов. Таким образом, “частота” определяется числом импульсов или пиков в единицу времени.
На Фиг.11 показана логическая схема, в которой сигналы, полученные от двухмерных датчиков, показанных на Фиг.5-9, могут быть использованы для определения движения объекта. Сигналы от двух детекторов датчика поступают на блок 130, и в результате определения изменений координат объекта в течение предопределенного периода времени в блоке принятия решения 132 выдается сообщение о выявленном движении в блок 136. В противном случае выдается сообщение об отсутствии движения, и логический круг возвращается назад к блоку 130.
В дополнение к распознанному движению, логическая схема для некоторых видов датчиков, описанных в настоящем документе, может быть направлена в блок принятия решения 130 для определения, по крайней мере, события одновременной активизации числа координат выше некоторого порога. Другими словами, определяется, получено ли одновременно число сигналов выше порога от множественных элементов детекторов, указывающих на то, что движущийся объект равен или превышает предопределенные размеры. В общем случае большими по размеру объектами являются люди, реакцией на появления которых может быть включение сигнализации, открытие дверей или другие похожие действия, тогда как меньшие по размеру движущиеся объекты (обычно животные) не требуют выполнения каких-либо подобных действий. Таким образом, для больших объектов в блоке принятия решения 138 осуществляется переход к блоку 140, что указывает на “целевой объект” и, например, активизируется сигнал тревоги 22. С другой стороны, если объект недостаточно большой, никаких действий предприниматься не будет.
Более того, блок 142 указывает, что полярность сигналов может быть использована, как обсуждалось выше, для определения направления движения вне зависимости от размеров объекта. В некоторых случаях желательно выполнить то или иное действие (такое как активизация сигнала тревоги 22 или открытие двери) не только при наличии большого движущегося объекта, но и в присутствии большого движущегося объекта, который движется в предопределенном направлении. В этих условиях сигнал может быть генерирован на выполнение предопределенного действия только в случае, если блок 142 укажет, что большой движущийся объект действительно движется в предопределенном направлении.
Теперь может быть оценено то, что датчики, описанные выше, распознают белый свет помех от движущихся объектов, так же как в определенных ситуациях различают движущиеся объекты друг от друга на основе их размеров. Также один или более датчиков, описанных выше, могут обеспечивать грубое определение направления движения подвижного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНАЯ ИНФРАКРАСНАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ФОРМИРОВАНИЕМ ГРАНИЧНЫХ СИГНАЛОВ | 2014 |
|
RU2571589C1 |
| Интеллектуальное пассивное инфракрасное средство обнаружения | 2016 |
|
RU2629146C1 |
| Пассивное инфракрасное устройство для обнаружения нарушителя с формированием граничных сигналов | 2017 |
|
RU2661751C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| РОБОТИЗИРОВАННЫЙ ОХРАННО-ПОЖАРНЫЙ КОМПЛЕКС | 2010 |
|
RU2426570C1 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТИ ЭЛЕМЕНТОВ КОЛЕСНОГО УЗЛА | 1996 |
|
RU2126754C1 |
| ОХРАННЫЙ ИЗВЕЩАТЕЛЬ С ИНФРАКРАСНЫМ КАНАЛОМ ОБНАРУЖЕНИЯ | 2005 |
|
RU2292597C1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| ОХРАННАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2000 |
|
RU2231123C2 |
Изобретение относится к измерительной технике. Датчик включает два детектора, состоящих из элементов различной конфигурации, таких, что при движении объекта перед ними каждый элемент дает на выходе соответствующую частоту. Основываясь на наличии двух частот с одинаковыми характеристиками пика и/или формы, выдается сигнал о движении, например, в виде сигнала тревоги. В другой реализации детекторы имеют множественные (составные) элементы, в которых элементы одного детектора подключены в направлении, ортогональном направлению, в котором подключены элементы другого детектора. Сигналы с детекторов объединяются для определения движения объекта и его размера. По сравнению с первой реализацией элементы в каждом детекторе могут быть сконфигурированы по-разному, а полярность сигналов может быть использована для определения направления движения. В еще одной реализации детекторы могут быть одного размера, но иметь оптику с разными фокусными расстояниями. Технический результат - ослабление помех при определении направления движения. 2 н. и 8 з.п. ф-лы, 11 ил.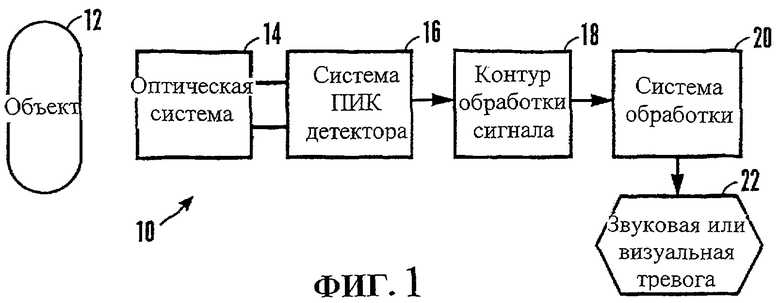
1. Пассивный инфракрасный (ИК) датчик движения, включающий:
по крайней мере, первый (инфракрасный) ИК-детектор (36а), выдающий первый сигнал, имеющий первую частоту, когда движущийся объект перемещается в пространстве обнаружения первого детектора (36а);
по крайней мере, второй ИК-детектор (38а), выдающий второй сигнал, имеющий вторую частоту, когда движущийся объект перемещается в пространстве обнаружения второго детектора (38а), при этом вторая частота отличается от первой;
и систему обработки (20), в которую поступают первый и второй сигналы и которая, по крайней мере, частично на основе первого и второго сигналов выдает выходной сигнал обнаружения, представляющий движущийся объект, где детекторы (36а, 38а) имеют одинаковый размер, первый детектор (36а) снабжен первой оптической системой (14), определяющей первое фокусное расстояние, а второй детектор (38а) снабжен второй оптической системой (14), определяющей второе фокусное расстояние, отличное от первого фокусного расстояния, при этом первый детектор (36а) контролирует первый объем пространства, которое, по крайней мере, частично оптически пересекается со вторым объемом пространства, которое контролирует второй детектор (38а).
2. Датчик по п.1, в котором каждый детектор (36а, 38а) размещен в отдельном от другого корпусе.
3. Датчик по п.1, в котором каждый детектор (36а, 38а) имеет только два соответствующих элемента, которые имеют одинаковый друг с другом размер и одинаковую величину промежутка между центрами смежных элементов первого детектора (36а), равную величине промежутка между центрами смежных элементов второго детектора (38а).
4. Пассивный инфракрасный (ИК) датчик движения, включающий: оптическую систему, содержащую оптические компоненты для фокусировки изображения,
по крайней мере, первый инфракрасный (ИК) детектор (28, 36, 36а, 66, 82, 90, 98, 110), выдающий первый выходной сигнал, имеющий первую частоту, когда движущийся объект перемещается в объеме обнаружения первого детектора;
по крайней мере, второй инфракрасный (ИК) детектор (30, 38, 38а, 68, 84, 92, 102, 112), выдающий второй выходной сигнал, имеющий вторую частоту, когда движущийся объект перемещается в объеме обнаружения второго детектора, при этом вторая частота отличается от первой;
и систему обработки (20), в которую поступают первый и второй сигналы и которая, по крайней мере, частично на основе первого и второго сигналов выдает выходной сигнал обнаружения, представляющий движущийся объект,
при этом первый детектор контролирует первый объем пространства, которое, по крайней мере, частично оптически пересекается со вторым объемом пространства, контролируемого вторым детектором.
5. Датчик по п.4, в котором каждый детектор (28, 36, 90, 98) (30, 38, 92, 102) включает, по крайней мере, два элемента, элементы первого детектора (28, 36, 90, 98) определяют первую величину промежутка между центрами смежных элементов, а элементы второго детектора (30, 38, 92, 102) определяют вторую величину промежутка между центрами смежных элементов, при этом первая величина промежутка между центрами смежных элементов не равна второй величине промежутка между центрами смежных элементов.
6. Датчик по п.5, в котором размеры элементов первого детектора (28, 36, 90, 98) не равны размерам элементов второго детектора (30, 38, 92, 102).
7. Датчик по п.5, в котором первый детектор (28, 36, 90, 98) имеет первое число элементов, а второй детектор (30, 38, 92, 102) имеет второе число элементов, отличное от первого числа.
8. Датчик по п.4, в котором первый и второй детекторы (30, 32) размещены на общей подложке (26) в едином корпусе (35).
9. Датчик по п.4, в котором первый и второй детекторы (36, 36а, 66, 82, 90, 98, 110) (38, 38а, 68, 84, 92, 102, 112) размещаются в раздельных друг от друга корпусах.
10. Датчик по п.4, в котором первый детектор (66, 82, 90, 98, 110) имеет, по крайней мере, два ряда элементов, по крайней мере, с двумя элементами в ряду, а второй детектор (68, 84, 92, 102, 112) имеет, по крайней мере, два элемента.
| US 6163025 А, 19.12.2000 | |||
| US 3829693 А, 13.08.1974 | |||
| US 5461231 А, 24.10.1995 | |||
| Устройство для определения направления движения объектов | 1991 |
|
SU1777163A1 |

