Изобретение относится к технике связи и может быть использовано в системах передачи данных с параллельными (многочастотными) сигналами.
В современных системах передачи данных по нестационарным каналам связи для обеспечения требуемых скорости и достоверности необходимо в режиме реального времени оценивать текущее качество передачи и, в случае необходимости, изменять параметры системы передачи, такие как рабочая частота, длительность элементарного сигнала, позиционность модуляции, вид и параметры помехоустойчивого кода и т.д. Оценка качества передачи производится на приемной стороне, на ней же принимаются решения о необходимости изменения параметров передачи и вырабатываются команды управления. Далее команды управления необходимо по каналу обратной связи довести до передающей стороны. От достоверности передачи командной информации и времени ее доведения по каналу обратной связи в значительной степени зависит эффективность всей системы передачи данных.
Существуют различные методы организации канала обратной связи, однако данные методы рассчитаны, как правило, либо на полудуплексную систему связи, либо на систему связи, в которой полезная информация передается только в одном направлении, а канал обратной связи служит только для передачи команд управления. Однако существуют системы связи синхронного типа, в которых в обоих направлениях идет сравнимый по интенсивности поток информационных бит, и передаваемые команды управления необходимо размещать в этом потоке.
Прототипом заявляемого способа является способ организации канала обратной связи, описанный в патенте РФ №2451395 «Способ размещения управляющей информации в системе беспроводной связи». В данном способе для передачи команд управления передаваемый информационный поток бит делится на кадры, которые в свою очередь делятся на подкадры. Для команд управления отводятся подкадры с заранее известными номерами. Таким образом, для командной информации всегда зарезервирована некоторая часть частотно-временного ресурса системы передачи данных, независимо от того имеются ли в наличии команды, подлежащие передаче по каналу обратной связи. Кроме того, при появлении необходимости в отправке команды управления, возможность для ее передачи появляется только при начале следующего кадра данных.
Недостатком прототипа является необходимость резервирования некоторого частотно-временного ресурса системы передачи данных для передачи команд управления вне зависимости от наличия команд управления, подлежащих передаче.
Целью изобретения является обеспечение в синхронных системах связи возможности передачи команд управления по каналу обратной связи без необходимости резервирования некоторого частотно-временного ресурса системы передачи данных для передачи команд управления.
Поставленная цель достигается тем, что для передачи команд управления не резервируется заранее часть частотно-временного ресурса системы связи, при появлении команды, подлежащей передаче, на поток информационных бит, модулируемых с использованием фазовой модуляции, дополнительно накладывается амплитудная модуляция в соответствии с частотно-временной матрицей размерностью M×N, где М - количество используемых субчастот, а N - количество элементарных символов группового сигнала, используемых для передачи команды, элементы этой матрицы принимают значения 1 или α и являются коэффициентами увеличения мощности сигнала для соответствующей субчастоты на соответствующем временном интервале, на приемной стороне после установления тактовой синхронизации сигнал накапливается в буфере длиной N элементарных символов, производится его демодуляция с помощью быстрого преобразования Фурье, при этом вычисляется мощность сигнала на каждой из субчастот для каждого из элементарных символов, формируется L гипотез о возможном наличии одной из L возможных команд, каждой из гипотез ставится в соответствие численный показатель Zk, где k - порядковый номер гипотезы, данный показатель представляет собой взвешенную сумму мощностей предполагаемых увеличенных частотно-временных компонент принятого сигнала, среди элементов вектора Zk вычисляются два максимальных - Zmax и Zmax2, фиксируется индекс m гипотезы, которой соответствует абсолютный максимум Zmax, производится проверка условия Zmax>bZmax2, где b - пороговый коэффициент, рассчитываемый исходя из количества элементарных посылок группового сигнала, задействованных для передачи команды, требований к вероятностям ложного установления и неустановления цикловой синхронизации, а также величины α, в случае выполнения данного условия принимается решение о приеме команды, которой соответствует гипотеза с значением численного показателя Zk, равным Zmax, если же данное условие не выполняется, то принимается решение об отсутствии передаваемой команды управления, из принятого буфера исключается первый элементарный символ группового сигнала, осуществляется прием нового элементарного символа группового сигнала, который добавляется в конец буфера и процедура поиска передаваемой команды повторяется.
Учитывая ограниченную мощность передатчика и существование пик-фактора, характерное для многоканальных систем передачи, матрица должна формироваться таким образом, чтобы количество субчастот с увеличенной амплитудой на длительности каждого канального символа было одинаково. Кроме того, расположение коэффициентов α в частотно-временных матрицах различных команд должно обладать хорошими автокорреляционными свойствами по оси времени, т.е. иметь отчетливый пик при сравнении с заранее сгенерированным на приемной стороне эталоном только на начальной позиции, а также хорошими взаимокорреляционными свойствами, т.е. взаимокорреляционные функции не должны принимать значений, сравнимых с главным пиком автокорреляционных функций.
Рассмотрим процесс передачи команд управления на примере матрицы размерностью 8×8. На передающей стороне частотно-временная матрица, соответствующая команде 1, формируется в соответствии с правилом:


j=0…N-1, i=0…M-1,
где pi,j - мощность сигнала на i-й субчастоте на длительности j-й посылки;
N - количество элементарных посылок в канальном блоке;
М - количество субчастот в групповом сигнале;
А0 - номинальный уровень амплитуды сигнала на отдельной субчастоте;
α - коэффициент увеличения уровня мощности на отдельных элементах группового сигнала по отношению к остальным элементам.
Тогда частотно-временная матрица будет иметь вид, представленный в левой части фиг. 1. Элементы диагонали, помеченные индексом α, имеют повышенную мощность. Прочие элементы матрицы сигнала передаются с номинальной мощностью. Частотно-временная матрица для команды 2 будет иметь вид, представленный в правой части фиг. 1
На приемной стороне производится накопление сигнала, принятого из радиоканала, на длительности, соответствующей времени передачи N элементарных посылок. В накопленном сигнале устанавливается тактовая синхронизация, после чего первая элементарная посылка условно принимается за опорную. Начиная с этой посылки для каждой элементарной посылки производится демодуляция сигнала путем вычисления синфазной и квадратурной составляющих сигнала на всех используемых в системе субчастотах. Также в процессе демодуляции можно получить значения мощности сигнала для всех субчастот на длительности каждого канального символа:
 ,
,
где Pi,j - мощность сигнала, Si,j - значение синфазной составляющей, Сi,j - -значение квадратурной составляющей сигнала на i-й субчастоте j-й элементарной посылки, вычисляемые путем быстрого преобразования Фурье.
Далее формируется L гипотез о наличии передаваемых команд. Каждой гипотезе ставится в соответствие численный показатель Zk, который представляет собой сумму отношений средней мощности элементов сигнала, на которых предполагается повышенная мощность сигнала, к средней мощности остальных элементов строки частотно-временной матрицы.
Численный показатель Zk, соответствующий k-й гипотезе, представляет собой взвешенную сумму мощностей предполагаемых увеличенных частотно-временных компонент принятого сигнала:
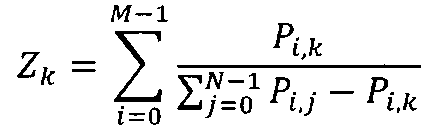 .
.
Взвешивание производится для исключения влияния неравномерности спектра помех, а также неравномерности амплитудно-частотной характеристики приемо-передающего тракта и канала связи на принятие решения.
Затем определяются два максимальных элемента вектора Zk: Zmax и Zmax2. Фиксируется индекс m гипотезы, которой соответствует абсолютный максимум Zmax. Для снижения вероятности ложного приема команды производится проверка условия Zmax>bZmax2, где b - некоторый пороговый коэффициент, рассчитываемый заранее, исходя из количества посылок, используемых для передачи команды, требований к вероятности ложного приема команды, вероятности неприема переданной команды, а также величины α - коэффициента увеличения мощности излучения на отдельных компонентах сигнала.
В случае выполнения данного условия принимается решение о приеме команды с номером m. Если же данное условие не выполняется, то считается, что команда не передавалась, из буфера исключается самый старый элементарный символ группового сигнала, осуществляется прием нового символа и добавление его в конец буфера, и процедура поиска команды повторяется для вновь полученного окна из N элементарных посылок сигнала.
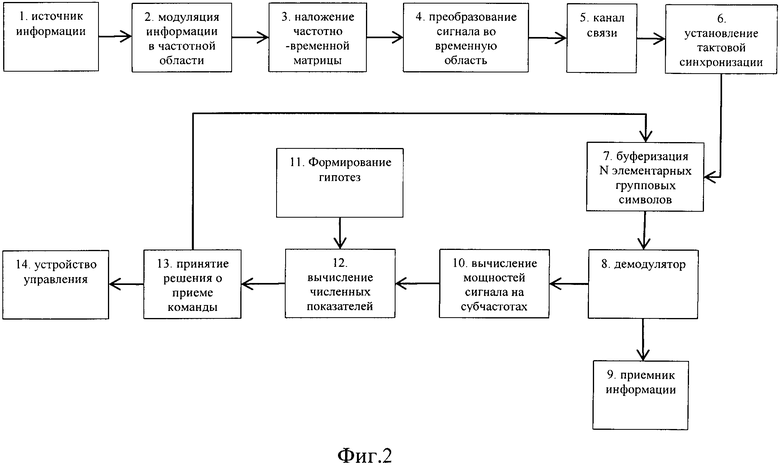
На Фиг. 2 изображена структурная схема способа приема команды управления.
Данные из источника информации 1 поступают на модулятор 2, который формирует спектр сигнала в частотной области. В блоке 3 в полученном сигнале производится увеличение мощности отдельных субчастот на длительности определенных элементарных посылок по заранее созданной частотно-временной матрице, соответствующей передаваемой команде. Далее, в блоке 4, сформированный спектр преобразуется в сигнал во временной области. После прохождения канала связи 5 и установления в блоке 6 тактовой синхронизации сигнал накапливается в буфере 7 длиной, кратной N элементарным символам. В блоке 8 производится демодуляция в частотной области накопленного сигнала, результаты которой выдаются приемнику информации 9. Используя промежуточные результаты демодуляции в блоке 10 для каждого из N элементарных символов вычисляются мощности сигнала на всех субчастотах Pi,j. В блоке 11 формируются различные гипотезы о возможном времени начала кодового блока. На основе полученных в блоке 10 значений Pi,j каждой из этих гипотез в блоке 12 ставится в соответствие численный показатель Zk. В блоке 13 производится вычисление значения Zmax, Zmax2 и принимается решение о факте приема команды. В случае принятия решения о приеме команды, номер принятой команды передается в устройство управления 14. Далее в накопленном буфере данных в блоке 7 исключается самый старый элементарный групповой символ и накапливается новый, затем процесс поиска команды осуществляется заново.
Таким образом, данный способ установления цикловой синхронизации не требует предварительной передачи специальных последовательностей, служащих только для установления цикловой синхронизации, что позволяет использовать его в системах связи синхронного типа без канала обратной связи. При его использовании синхронизация может быть установлена при включении приемной и передающей станции в любые произвольные моменты времени.
Изобретение относится к технике связи и может быть использовано в системах передачи данных с параллельными (многочастотными) сигналами с фазовой модуляцией. Технический результат - обеспечение возможности передачи команд управления по каналу обратной связи без резервирования частотно-временного ресурса системы передачи данных для передачи команд управления. В процессе формирования фазоманипулированного информационного сигнала на передающей стороне на него дополнительно накладывается амплитудная модуляция по заранее созданной частотно-временной матрице, соответствующей передаваемой команде, а на приемной стороне оцениваются мощности сигнала на отдельных субчастотах для различных элементарных символов группового сигнала и по взвешенным суммам этих мощностей определяется факт приема команды. Вид частотно-временной матрицы выбирается таким образом, чтобы ее автокорреляционная функция имела значительный пик только при нулевом сдвиге, а взаимокорреляционные функции различных матриц не имели значительных пиков. Передача команды может быть осуществлена в любой момент времени, при этом в системе связи не резервируется заранее часть частотно-временного ресурса. 2 ил.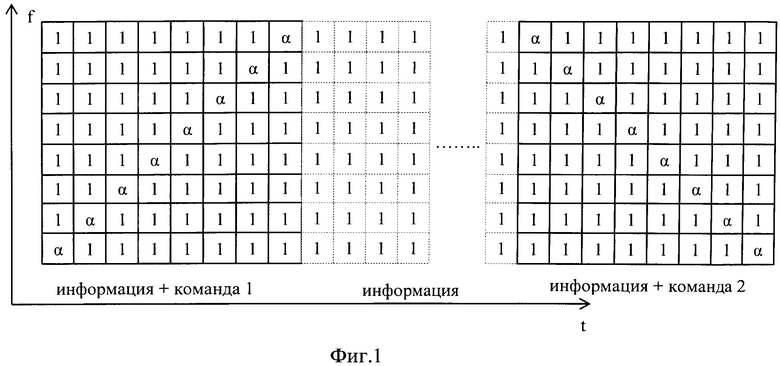
Способ передачи команд управления в синхронных системах связи по КВ-радиоканалу, отличающийся тем, что для передачи команд управления не резервируется заранее часть частотно-временного ресурса системы связи, при появлении команды, подлежащей передаче, на поток информационных бит, модулируемых с использованием фазовой модуляции, дополнительно накладывается амплитудная модуляция в соответствии с частотно-временной матрицей размерностью M×N, где М - количество используемых субчастот, а N - количество элементарных символов группового сигнала, используемых для передачи команды, элементы этой матрицы принимают значения 1 или α и являются коэффициентами увеличения мощности сигнала для соответствующей субчастоты на соответствующем временном интервале, на приемной стороне после установления тактовой синхронизации сигнал накапливается в буфере длиной N элементарных символов, производится его демодуляция с помощью быстрого преобразования Фурье, при этом вычисляется мощность сигнала на каждой из субчастот для каждого из элементарных символов, формируется L гипотез о возможном наличии одной из L возможных команд, каждой из гипотез ставится в соответствие численный показатель Zk, где k - порядковый номер гипотезы, данный показатель представляет собой взвешенную сумму мощностей предполагаемых увеличенных частотно-временных компонент принятого сигнала, среди элементов вектора Zk вычисляются два максимальных - Zmax и Zmax2, фиксируется индекс m гипотезы, которой соответствует абсолютный максимум Zmax, производится проверка условия Zmax>bZmax2, где b - пороговый коэффициент, рассчитываемый исходя из количества элементарных посылок группового сигнала, задействованных для передачи команды, требований к вероятностям ложного установления и неустановления цикловой синхронизации, а также величины α, в случае выполнения данного условия принимается решение о приеме команды, которой соответствует гипотеза с значением численного показателя Zk, равным Zmax, если же данное условие не выполняется, то принимается решение об отсутствии передаваемой команды управления, из принятого буфера исключается первый элементарный символ группового сигнала, осуществляется прием нового элементарного символа группового сигнала, который добавляется в конец буфера и процедура поиска передаваемой команды повторяется.
| СПОСОБ РАЗМЕЩЕНИЯ УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2451395C1 |
| Станок для копирования фотографических отпечатков на рулонной бумаге | 1935 |
|
SU44438A1 |
| Устройство передачи команд управления | 1982 |
|
SU1107303A1 |
| US 6282430 B1, 28.08.2001 | |||
| US 6167031 A1, 26.12.2000 | |||
| Способ получения @ -хлорпропионовой кислоты | 1990 |
|
SU1816756A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

