Изобретение относится к радиотехнике и может быть использовано в системах скрытного контроля воздушного, наземного и надводного пространства с использованием неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения, излучающих сигналы с расширенным спектром.
Достижение высокой эффективности обнаружения, локализации и классификации функционирующих в режиме радиомолчания объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, их отражающих свойств, а также несовершенством известных способов радиоконтроля.
Технология пассивного радиомониторинга радиомолчащих объектов, использующая естественный подсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое радиовещание, наземное и спутниковое телевидение), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность радиоконтроля широкого класса объектов.
Известно, что за счет движения цели эхо-сигнал от ее корпуса испытывает доплеровский сдвиг частоты. Кроме этого вибрация или вращение цели и отдельных частей ее конструкции вызывают дополнительную модуляцию эхо-сигнала, которая формирует две боковые полосы частот около основного доплеровского эхо-сигнала. Этот эффект, известный как микродоплеровская модуляция или микродоплеровская сигнатура (характерный признак, комплексная характеристика цели), обеспечивает дополнительную уникальную информацию о типе каждой цели и может быть использован для обнаружения и классификации перемещающихся и даже неподвижных целей, например, широкого класса пропеллерных (винтокрылых) пилотируемых и беспилотных аппаратов, перемещающихся в воздухе, на земле и на воде, а также функционирующих неподвижных вертолетов, квадрокоптеров, экранопланов и катеров-амфибий.
Известен способ радиомониторинга радиомолчащих объектов [1], заключающийся в том, что выбирают радиопередатчик, излучающий непрерывный монохроматический или амплитудно-модулированный сигнал, когерентно принимают решеткой антенн многолучевой сигнал, включающий прямой сигнал передатчика и рассеянные объектами сигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами сигналов в цифровые сигналы, из цифровых сигналов формируют очищенные от прямого сигнала передатчика сигналы, по очищенным сигналам определяют и запоминают число принятых рассеянных сигналов, их амплитуды, доплеровские сдвиги частоты и соответствующие каждому рассеянному сигналу составляющие комплексного временного спектра принятого каждой антенной сигнала, по которым определяют азимутально-угломестные направления прихода каждого рассеянного сигнала, выполняют обнаружение и находят оценку бистатической скорости радиомолчащих объектов по значениям доплеровского сдвига и азимутально-угломестного направления приема рассеянных сигналов.
Данный способ не обеспечивает определение дальности до обнаруженных объектов.
Более эффективным является способ радиомониторинга радиомолчащих объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
выбирают радиопередатчик, излучающий сигнал с расширенным спектром,
синхронно принимают решеткой антенн многолучевые сигналы, включающие прямой сигнал передатчика и рассеянные объектами сигналы этого передатчика,
синхронно преобразуют ансамбль принятых антеннами сигналов в цифровые сигналы,
из цифровых сигналов формируют сигналы комплексных частотно-временных изображений антенн,
по которым определяют число рассеянных сигналов, их доплеровские сдвиги частоты и задержки по времени, а также
выделяют соответствующие найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений, из которых
формируют векторный сигнал амплитудно-фазового распределения (АФР) каждого рассеянного сигнала,
который совместно со значениями доплеровского сдвига частоты и задержки по времени используют для обнаружения и пространственной локализации радиомолчащего объекта.
Способ-прототип обеспечивает пространственную локализацию целей, что повышает эффективность скрытного слежения за радиомолчащими объектами.
Недостатком данного способа является низкая вероятность обнаружения и отсутствие возможности классификации радиомолчащих объектов.
Это обусловлено тем, что у способа-прототипа отсутствуют операции анализа эхо-сигналов доплеровской сигнатуры контролируемых объектов, что существенно снижает вероятность обнаружения и не позволяет осуществить классификацию широкого класса радиомолчащих объектов.
Техническим результатом изобретения является повышение вероятности обнаружения и обеспечение возможности классификации радиомолчащих объектов.
Повышение вероятности обнаружения и обеспечение возможности классификации радиомолчащих объектов достигается за счет:
- использования дополнительной информации о тонкой структуре эхо-сигналов доплеровской сигнатуры объектов (основного доплеровского эхо-сигнала от корпуса объекта и дополнительных эхо-сигналов микродоплеровской сигнатуры объекта);
- применения новых операций формирования эхо-сигналов доплеровской сигнатуры объектов, реализующих сравнение и объединение рассеянных сигналов на основе частотной (доплеровский сдвиг), временной (задержка) и угловой (амплитудно-фазовое распределение принятых решеткой антенн сигналов) информации.
Технический результат достигается тем, что в способе радиомониторинга радиомолчащих объектов, заключающемся в том, что выбирают радиопередатчик, излучающий сигнал с расширенным спектром, синхронно принимают решеткой антенн многолучевые сигналы, включающие прямой сигнал передатчика и рассеянные объектами сигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами сигналов в цифровые сигналы, из цифровых сигналов формируют сигналы комплексных частотно-временных изображений антенн, по которым определяют число рассеянных сигналов, их доплеровские сдвиги частоты и задержки по времени, а также выделяют соответствующие найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений, из которых формируют векторный сигнал амплитудно-фазового распределения (АФР) каждого рассеянного сигнала, согласно изобретению сравнивают рассеянные сигналы и сигналы с отличающимися доплеровскими сдвигами частоты, но совпадающими задержками и АФР объединяют в многочастотный сигнал с симметричным спектром, который идентифицируют как эхо-сигнал доплеровской сигнатуры обнаруженного объекта, по эхо-сигналам доплеровской сигнатуры определяют азимутально-угломестное направление, пространственные координаты, бистатическую скорость и осуществляют классификацию обнаруженных объектов.
Операции способа поясняются чертежами:
Фиг. 1. Структурная схема устройства, реализующего предложенный способ радиомониторинга радиомолчащих объектов;
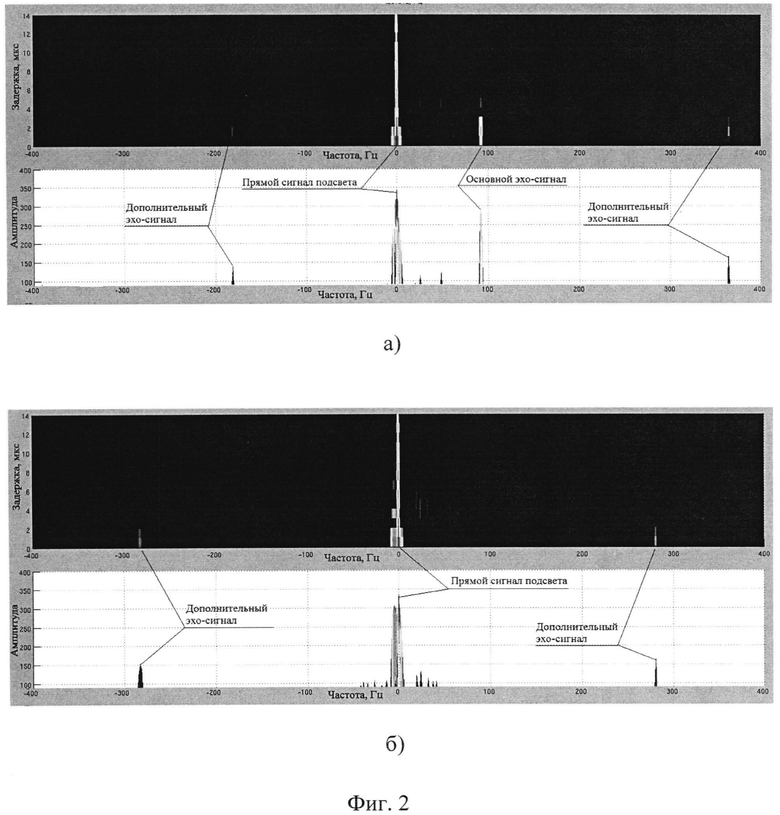
Фиг. 2. Эхо-сигналы доплеровской сигнатуры: а) подвижный объект; б) неподвижный объект.
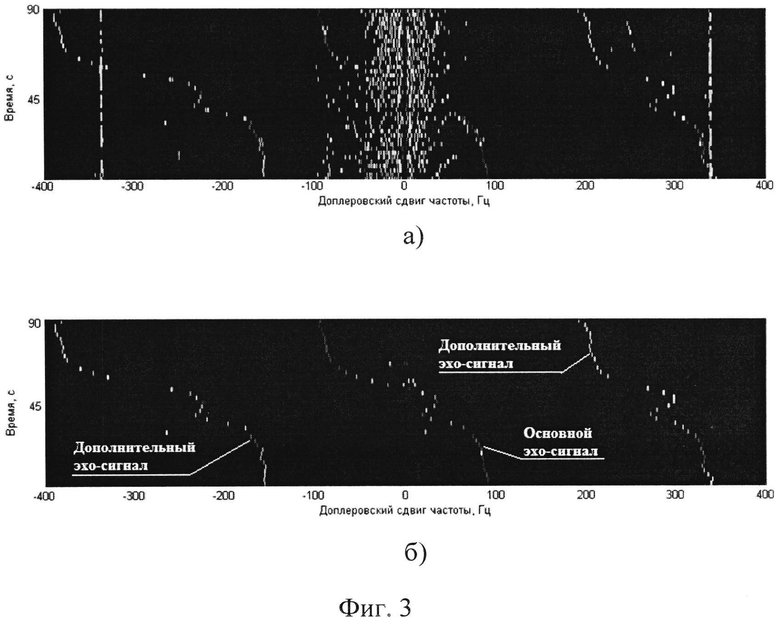
Фиг. 3. Особенности функционирования устройства, реализующего предложенный способ.
Устройство (фиг. 1), в котором реализуется предложенный способ, включает последовательно соединенные антенную систему 1, N - канальный преобразователь частоты (ПРЧ) 2, N - канальное устройство квадратурной дискретизации 3, вычислитель 4 и устройство отображения 5.
В свою очередь вычислитель 4 включает устройство формирования частотно-временных изображений 4-1, устройство обнаружения и классификации 4-2.
Устройства 4-1 и 4-2 могут быть выполнены в одноканальном или многоканальном вариантах. Рассмотрим многоканальный вариант, обеспечивающий максимально возможное быстродействие обнаружения и классификации радиомолчащих объектов.
Антенная система 1 содержит N антенн с номерами n=1 … N, объединенных в решетку. Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной.
Полоса пропускания каждого канала многоканального ПРЧ 2 обеспечивает одновременный прием радиосигнала передатчика. Кроме того, ПРЧ 2 и устройство 3 выполнены с общим опорным генератором, который обеспечивает когерентный прием радиосигналов. Для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности ПРЧ 2 обеспечивает подключение одной из антенн вместо всех антенн решетки. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов. Если разрядность и быстродействие АЦП, входящих в состав устройства 3, достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то вместо ПРЧ 2 могут использоваться частотно-избирательный полосовой фильтр и усилитель. Другими словами, аналоговая часть устройства, реализующего предлагаемый способ, может быть построена по принципу прямого усиления.
Устройство, реализующее предложенный способ, работает следующим образом.
Многолучевой радиосигнал, включающий прямой сигнал выбранного передатчика, излучающего сигнал с расширенным спектром, и рассеянные объектами сигналы этого передатчика, когерентно принимаются антеннами решетки 1. Принятый каждой антенной решетки 1 зависящий от времени t суммарный радиосигнал xn(t) в ПРЧ 2 когерентно переносится на более низкую частоту, где n=1, …, N - номер антенны.
Сформированный в ПРЧ 2 ансамбль принятых радиосигналов xn(t) синхронно преобразуется в устройстве 3 в ансамбль комплексных цифровых сигналов 
Цифровые сигналы 
1) из цифровых сигналов
Формирование сигналов комплексных ЧВИ антенн осуществляется известными способами.
Так, следуя способу [2], выполняются следующие действия:
- из цифровых сигналов формируются прямой сигнал передатчика и очищенные от прямого сигнала передатчика сигналы каждой антенны;
- вычисляются зависящие от временного и частотного сдвигов комплексные двумерные взаимно корреляционные функции (ДВКФ) между очищенным сигналом каждой антенны и прямым сигналом передатчика. Сформированная из очищенного сигнала отдельной антенны ДВКФ является комплексным ЧВИ, описывающим распределение рассеянных сигналов по доплеровской частоте и временной задержке.
Другой более совершенный способ формирования сигналов комплексных ЧВИ не требует операций формирования очищенных от прямого сигнала передатчика сигналов каждой антенны [3]. Согласно этому способу выполняются следующие действия:
- из цифровых сигналов формируется прямой сигнал передатчика;
- из прямого сигнала и сигнала отдельной антенны итерационно формируется сигнал комплексного ЧВИ, описывающий распределение рассеянных сигналов по доплеровской частоте и временной задержке;
2) по сигналам комплексных ЧВИ антенн определяется число L рассеянных сигналов, их доплеровские сдвиги частоты ωℓ и задержки по времени τpℓ, а также выделяются соответствующие найденным сдвигам и
задержкам составляющие комплексных ЧВИ knpℓ, из которых формируется векторный сигнал АФР  каждого рассеянного сигнала, где p,ℓ - номер дискретного значения задержки и доплеровского сдвига частоты соответственно, а […]T - означает операцию транспонирования.
каждого рассеянного сигнала, где p,ℓ - номер дискретного значения задержки и доплеровского сдвига частоты соответственно, а […]T - означает операцию транспонирования.
Полученные в устройстве 4-1 число L рассеянных сигналов, значения доплеровского сдвига частоты ωℓ и задержки τpℓ, а также векторный сигнал АФР Kpℓ каждого рассеянного сигнала поступают в устройство 4-2, где запоминаются.
После этого в устройстве 4-2 выполняются следующие действия:
1) сравниваются рассеянные сигналы и сигналы с отличающимися доплеровскими сдвигами частоты, но совпадающими задержками и АФР объединяются в многочастотный сигнал с симметричным спектром.
Сравнение и объединение рассеянных сигналов осуществляется на основе частотной (доплеровский сдвиг), временной (задержка) и угловой информации в два этапа.
При этом используется отмеченный ранее факт, что эхо-сигналы отдельного объекта за счет вибрации или вращения отдельных частей его конструкции приобретают характерную для амплитудной или частотной модуляции сигналов симметричную структуру частотного спектра, состоящую из основного эхо-сигнала от корпуса объекта и симметрично расположенных сигналов нижней и верхней боковых полос, возникающих за счет модуляции основного эхо-сигнала. Кроме того, учитывается, что рассеянные отдельным объектом сигналы (основной эхо-сигнал от корпуса объекта и дополнительные эхо-сигналы нижней и верхней боковых полос) исходят из одной пространственной точки и, как следствие, в пункте приема совпадают по задержке (дальности) и по АФР (направлению прихода).
На первом этапе выполняются следующие действия:
- сравниваются рассеянные сигналы и отбираются рассеянные сигналы с удовлетворяющими следующим условиям частотами: ωk<ωℓ<ωm,  , k, ℓ, m=1, …, L, где δ, δ1, δ2 - порог по частоте, значение которого выбирается исходя из минимума вероятности пропуска сигнала, и совпадающими задержками τpk, τpℓ, τpm.
, k, ℓ, m=1, …, L, где δ, δ1, δ2 - порог по частоте, значение которого выбирается исходя из минимума вероятности пропуска сигнала, и совпадающими задержками τpk, τpℓ, τpm.
Физически эту операцию можно рассматривать как объединение отдельных, совпадающих по задержке (дальности), рассеянных сигналов в группы многочастотных сигналов с симметричным спектром. Для каждой группы характерно наличие основного эхо-сигнала с центральной частотой ωℓ, а также двух и более дополнительных эхо-сигналов, симметрично расположенных на частотах ωk и ωm и совпадающих по задержке (дальности).
Пример эхо-сигналов в координатах "задержка-доплеровский сдвиг частоты" и "амплитуда-доплеровский сдвиг частоты" подвижного (приближающегося) а) и неподвижного б) объекта приведен на фиг. 2.
При этом у приближающегося объекта доплеровский сдвиг частоты основного эхо-сигнала имеет положительное значение, равное ωℓ=90 Гц, а доплеровские сдвиги частоты дополнительных эхо-сигналов равны ωk=-185 Гц и ωm=365 Гц. Задержки основного и дополнительных эхо-сигналов совпадают и равны τpk=τpℓ=τpm=2 мкс. У неподвижного объекта доплеровский сдвиг частоты основного эхо-сигнала имеет нулевое значение, а доплеровские сдвиги частоты дополнительных эхо-сигналов равны соответственно ωk=-280 Гц и ωm=280 Гц. Задержки основного и дополнительных эхо-сигналов совпадают и равны τpk=τpℓ=πpm=1 мкс;
- сравнивается с порогом значение модуля доплеровского сдвига частоты |ωℓ| основного эхо-сигнала каждого отобранного сигнала и принимается решение о наличии подвижного объекта при |ωℓ|>Δω и неподвижного объекта при |ωℓ|≤Δω.
Порог Δω выбирается исходя из минимизации вероятности ошибки определения типа объекта.
На втором этапе сравниваются с порогом ρ коэффициенты взаимной корреляции составляющих knpℓ, knpk, knpm комплексных частотно-временных изображений отобранных сигналов каждого подвижного объекта  ,
,  и составляющих knpk, knpm комплексных частотно-временных изображений отобранных сигналов каждого неподвижного объекта
и составляющих knpk, knpm комплексных частотно-временных изображений отобранных сигналов каждого неподвижного объекта  . При превышении порога принимается решение об объединении отобранных сигналов. Порог по корреляции ρ выбирается исходя из минимизации вероятности ложной тревоги, а ()* - означает комплексное сопряжение.
. При превышении порога принимается решение об объединении отобранных сигналов. Порог по корреляции ρ выбирается исходя из минимизации вероятности ложной тревоги, а ()* - означает комплексное сопряжение.
Отличие операций проверки уровня корреляции составляющих комплексных ЧВИ сигналов подвижных и неподвижных объектов обусловлено тем, что, как отмечалось ранее, для неподвижного объекта характерно равное или близкое к нулю значение доплеровского сдвига частоты ωℓ основного доплеровского эхо-сигнала от корпуса объекта (составляющая knpℓ) и, как следствие, существенное его маскирование прямым сигналом передатчика подсвета и отражениями от других неподвижных крупных объектов. В связи с этим для неподвижного объекта корреляция составляющих knpℓ с составляющими knpk и knpm мало информативна.
Отметим, что на данном этапе можно было предварительно найти по АФР, описываемым значениями составляющих knpℓ, knpk, knpm, направления прихода сравниваемых сигналов и объединить сигналы, приходящие из одного направления. Однако операции формирования и сравнения с порогом коэффициентов взаимной корреляции АФР требуют существенно меньших вычислительных затрат по сравнению с операциями определения направлений прихода сравниваемых сигналов и, как следствие, существенно повышают быстродействие данного этапа обработки сигналов [4].
2) каждый объединенный многочастотный сигнал с симметричным спектром идентифицируется как эхо-сигнал доплеровской сигнатуры обнаруженного объекта.
Отметим, что описанные операции обработки сигналов могут рассматриваться как операции распознавания и селекции полезных эхо-сигналов целей на фоне помех, эффективность которых иллюстрируется на фиг. 3.
Из фиг. 3, б видно, что в отличие от способа-прототипа (фиг. 3, а) предложенный способ обеспечивает распознавание и селекцию полезных эхо-сигналов доплеровской сигнатуры объекта на фоне интенсивного потока шумов и помех, что существенно повышает вероятность обнаружения радиомолчащих объектов и обеспечивает возможность их последующей классификации.
Для выполнения последующих операций идентифицированные эхо-сигналы доплеровской сигнатуры подвижных и неподвижных объектов фиксируются совместно с их параметрами (составляющие knpℓ, knpk, knpm, а также значения доплеровского сдвига частоты ωℓ основного доплеровского эхо-сигнала, значения доплеровских сдвигов частоты ωk, ωm дополнительных эхо-сигналов и их задержек по времени τpℓ, τpk, τpm).
Отметим, что описанные операции распознавания и селекции полезных эхо-сигналов целей на фоне помех являются ключевыми при повышении вероятности обнаружения и обеспечения возможности классификации широкого класса радиомолчащих объектов;
3) по эхо-сигналам доплеровской сигнатуры обнаруженного объекта определяется азимутально-угломестное направление, пространственные координаты, бистатическая скорость и осуществляется его классификация.
При определении азимутально-угломестных направлений прихода, например, с использованием известного способа [3] по идентифицированным эхо-сигналам доплеровской сигнатуры объектов (сигналы knpℓ в случае подвижного объекта и сигналы knpk и knpm в случае неподвижного объекта) синтезируется комплексный двумерный угловой спектр, по максимумам модуля которого определяется азимутально-угломестное направление прихода (α, β) рассеянного сигнала обнаруженного объекта, где α - азимут, а β - угол места.
После этого по найденным азимутально-угломестным направлениям прихода и задержкам по времени определяются пространственные координаты каждого обнаруженного объекта известными способами [4].
Бистатическая скорость определяется по формуле ϑb=λωℓ/2, где λ - длина волны радиосигнала подсвета. Для приведенного на фиг. 2а случая имеем ωℓ=90 Гц. При λ=0,5 м получаем ϑb=0,5·90/2=22,5 м/с=81 км/ч.
При классификации обнаруженных объектов в устройстве 4-2 выполняются следующие действия:
- сравниваются с порогом значения угломестного направления прихода β эхо-сигнала доплеровской сигнатуры каждого обнаруженного неподвижного объекта и принимаются решения о наличии:
воздушного неподвижного (зависшего) объекта при β>Δβ;
наземного неподвижного объекта при β≤Δβ;
- сравниваются с порогом значения угломестного направления прихода β эхо-сигнала доплеровской сигнатуры каждого обнаруженного подвижного объекта и принимаются решения о наличии:
воздушного подвижного объекта при β>Δβ;
наземного подвижного объекта при β≤Δβ.
Пороги Δω и Δβ выбираются исходя из минимизации вероятности ошибки определения типа объекта;
- эхо-сигналы доплеровской сигнатуры подвижных воздушных и наземных объектов преобразуются в эхо-сигналы с нулевым значением доплеровского сдвига частоты ωℓ основного эхо-сигнала от корпуса объекта.
Преобразование осуществляется путем смещения на нулевую частоту эхо-сигнала доплеровской сигнатуры каждого обнаруженного подвижного объекта. При этом компенсируется не информативный на последующем этапе классификации доплеровский сдвиг ωℓ основного эхо-сигнала от корпуса объекта и обеспечивается возможность классификации объектов по эхо-сигналам микродоплеровской сигнатуры, содержащим уникальную информацию о типе каждого обнаруженного объекта.
Для приведенного на фиг. 2а случая величина доплеровского сдвига основного эхо-сигнала от корпуса объекта, которая должна быть скомпенсирована, равна ωℓ=90 Гц.
Отметим, что для неподвижных объектов в данной операции нет необходимости, так как для них характерно нулевое значение доплеровского сдвига ωℓ основного эхо-сигнала от корпуса объекта. Следовательно, идентифицированные эхо-сигналы доплеровской сигнатуры неподвижных объектов фактически являются эхо-сигналами микродоплеровской сигнатуры и уже содержат уникальную информацию о типе каждого обнаруженного неподвижного объекта;
- по эхо-сигналам микродоплеровской сигнатуры осуществляется классификация обнаруженных объектов.
При этом эхо-сигналы микродоплеровской сигнатуры обнаруженных объектов сравниваются с предварительно сформированными для требуемых классов объектов эталонными эхо-сигналами микродоплеровской сигнатуры и по сигналам с максимальным совпадением определяется класс обнаруженного объекта.
В состав требуемых классов объектов, по которым предварительно формируются эталонные эхо-сигналы микродоплеровской сигнатуры, например, могут входить: самолет Як-54, вертолет Ми-1, вертолет Bell 47, квадрокоптер Parrot AR.Drone, катер-амфибия "Ямал 730" и т.д.
Сравнение эхо-сигналов микродоплеровской сигнатуры или полученных на их основе собственных векторов и собственных значений осуществляется известными способами, например корреляционным способом [5].
В устройстве 5 отображаются результаты радиомониторинга.
Таким образом, за счет применения новых операций, извлекающих дополнительную информацию о тонкой структуре электромагнитного поля эхо-сигналов доплеровской сигнатуры объектов (основного доплеровского эхо-сигнала от корпуса объекта и дополнительных эхо-сигналов микродоплеровской сигнатуры объекта), удается решить поставленную задачу с достижением технического результата.
Источники информации
1. RU, патент, 2429501, кл. G01S 13/02, 2011.
2. RU, патент, 2444754 C1, кл. G01S 13/02, 2012.
3. Пархоменко Н.Г., Перетятько А.А., Рейзенкинд Я.А., Онищенко B.C., Шевченко В.Н. Применение вариационного метода к задаче оценки параметров сигналов в пассивной радиолокации с посторонним подсветом // Автометрия. 2014. 50, №1. С. 60-65.
4. RU, патент, 2190236, кл. G01S 5/04, 2002.
5. Р. Дуда, П. Харт. Распознавание образов и анализ сцен. Изд. "Мир", М., 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОКОНТРОЛЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2014 |
|
RU2572584C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| Способ пространственной локализации радиомолчащих объектов | 2020 |
|
RU2758585C1 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2770176C1 |
| СПОСОБ СКРЫТНОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2724923C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471200C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2534222C1 |
| СПОСОБ ПОИСКА МАЛОЗАМЕТНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2528391C1 |
Изобретение относится к радиотехнике и может быть использовано в системах скрытного контроля воздушного, наземного и надводного пространства с использованием неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения, излучающих сигналы с расширенным спектром. Достигаемый технический результат изобретения - повышение вероятности обнаружения и обеспечение возможности классификации радиомолчащих объектов. Указанный результат достигается за счет использования дополнительной информации о тонкой структуре эхо-сигналов доплеровской сигнатуры объектов и применения новых операций, реализующих сравнение и объединение рассеянных сигналов на основе частотной (доплеровский сдвиг), временной (задержка) и угловой (амплитудно-фазовое распределение) информации. 3 ил.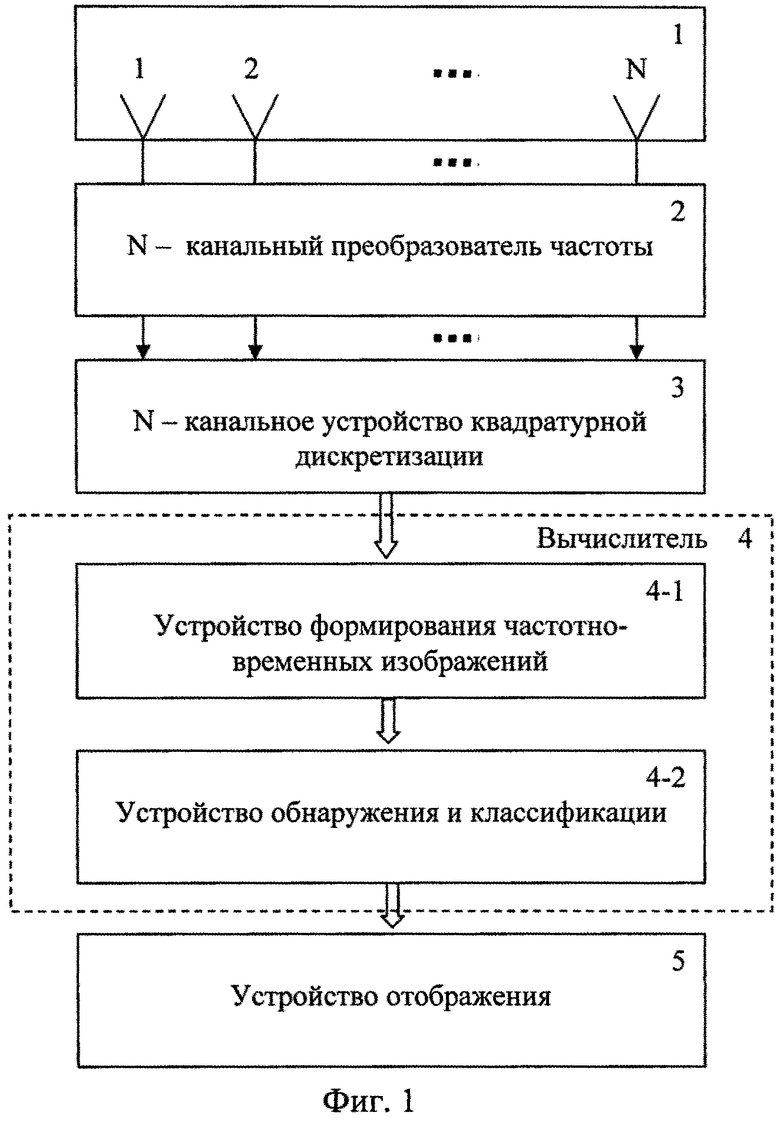
Способ радиомониторинга радиомолчащих объектов, заключающийся в том, что выбирают радиопередатчик, излучающий сигнал с расширенным спектром, синхронно принимают решеткой антенн многолучевые сигналы, включающие прямой сигнал передатчика и рассеянные объектами сигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами сигналов в цифровые сигналы, из цифровых сигналов формируют сигналы комплексных частотно-временных изображений антенн, по которым определяют число рассеянных сигналов, их доплеровские сдвиги частоты и задержки по времени, а также выделяют соответствующие найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений, из которых формируют векторный сигнал амплитудно-фазового распределения (АФР) каждого рассеянного сигнала, отличающийся тем, что сравнивают рассеянные сигналы и сигналы с отличающимися доплеровскими сдвигами частоты, но совпадающими задержками и АФР объединяют в многочастотный сигнал с симметричным спектром, который идентифицируют как эхо-сигнал доплеровской сигнатуры обнаруженного объекта, по эхо-сигналам доплеровской сигнатуры определяют азимутально-угломестное направление, пространственные координаты, бистатическую скорость и осуществляют классификацию обнаруженных объектов.
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО РАДИОМОНИТОРИНГА | 2012 |
|
RU2523913C2 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2007 |
|
RU2341024C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2005 |
|
RU2292650C1 |
| JP 2006033318 A, 02.02.2006 | |||
| JP 2006010333 A, 12.01.2006 | |||
| US 6545632 B1, 08.04.2003 | |||
| JP 2003262670 A, 19.09.2003. | |||

