Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации наземных, морских и воздушных объектов ограничивается существенной априорной неопределенностью размеров, отражающих свойств и состояний (пространственные координаты, направление и скорость движения) объекта, а также несовершенством известных способов обнаружения и слежения за подвижными объектами.
Технология скрытного обнаружения и слежения за подвижными объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ поиска малозаметных подвижных объектов [1], заключающийся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой антенн многолучевые радиосигналы, включающие прямой радиосигнал передатчика и рассеянные от объектов радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, из цифровых сигналов формируют прямые и сжатые рассеянные сигналы, сравнивают выделенные прямые и рассеянные сигналы и определяют временные задержки, доплеровские сдвиги и направления прихода рассеянных сигналов, по временным задержкам, доплеровским сдвигам и направлениям прихода выполняют обнаружение и пространственную локализацию воздушных объектов.
Данный способ не содержит операций подавления когерентной помехи в виде прямого радиосигнала передатчика и, как следствие, обеспечивает эффективное обнаружение только очень крупных близко расположенных объектов.
Более эффективным является способ поиска малозаметных подвижных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа.
Согласно этому способу используют прямые и рассеянные подвижными объектами широкополосные радиосигналы, излучаемые передатчиками радиоэлектронных систем различного назначения, когерентно принимают решеткой антенн многолучевые радиосигналы, включающие прямые и рассеянные радиосигналы, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы объединяют в матричный цифровой сигнал и запоминают, из матричного цифрового сигнала формируют сигнал пространственной корреляционной матрицы, который совместно с сигналом вектора наведения, определяемым азимутально-угломестным направлением приема прямого радиосигнала, длиной волны и геометрией решетки, преобразуют в сигнал оптимального весового вектора, преобразуют матричный цифровой сигнал в прямой цифровой сигнал, который запоминают, формируют и запоминают зависящие от временного сдвига комплексные взаимно корреляционные функции (ВКФ) между цифровым сигналом отдельной антенны и прямым цифровым сигналом, определяют максимальное значение модуля каждой комплексной ВКФ и фиксируют соответствующие этим максимумам значения комплексной ВКФ, вычисляют разностные цифровые сигналы, формируют зависящие от временного и частотного сдвигов комплексные двумерные взаимно корреляционные функции (ДВКФ) между каждым разностным цифровым сигналом и прямым цифровым сигналом, усредняют модули комплексных ДКФВ, определяют по максимумам усредненной ДКФВ число сжатых сигналов и фиксируют значения задержки по времени и абсолютного доплеровского сдвига каждого р-го сжатого сигнала,
идентифицируют соответствующие отдельному максимуму усредненной ДКФВ составляющие комплексных ДКФВ как сжатый по времени и частоте р-й сигнал, выделяют и запоминают значения составляющих комплексных ДКФВ, задержки по времени и абсолютного доплеровского сдвига каждого р-го сжатого сигнала, по выделенным значениям р-ых идентифицированных составляющих комплексных ДКФВ синтезируют комплексный двумерный угловой спектр, по максимумам модуля которого определяют азимутально-угломестное направление прихода р-го сжатого сигнала, по значениям задержки и абсолютного доплеровского сдвига и азимутально-угломестного направления прихода обнаруживают и определяют пространственные координаты подвижных объектов.
Способ-прототип благодаря наличию операций адаптивной пространственной фильтрации и операций радиоэлектронной компенсации когерентной помехи в виде мощного прямого радиосигнала передатчика подсвета обеспечивает обнаружение более широкого класса подвижных объектов. Однако способ-прототип содержит операции формирования частотно-временных изображений сигналов целей, основанные на формировании классической двумерной взаимной корреляционной функции, которая содержит высокие боковые лепестки, маскирующие сигналы далеких и слабо рассеивающих объектов, с одной стороны, и воспринимаемые как ложные цели, с другой.
Таким образом, недостатком способа-прототипа является низкая эффективность поиска (высокая вероятность пропуска целей и ложных тревог) малозаметных подвижных объектов.
Техническим результатом изобретения является повышение эффективности поиска малозаметных подвижных объектов.
Повышение эффективности поиска малозаметных подвижных объектов достигается за счет применения новых операций, обеспечивающих максимизацию выходного отношения сигнал/шум и основанных на нахождении наибольших собственных значений корреляционных матриц, используемых при формировании и компенсации являющегося когерентной помехой прямого сигнала передатчика подсвета, а также при выделении и оптимальном когерентном обнаружении полезных сигналов, полученных после компенсации помехи и откорректированных на заданном множестве гипотетических состояний (пространственные координаты, направление и скорость движения) объектов.
Технический результат достигается тем, что в способе поиска малозаметных подвижных объектов, заключающемся в том, что используют прямые и рассеянные подвижными объектами широкополосные радиосигналы, излучаемые передатчиками радиоэлектронных систем различного назначения, когерентно принимают решеткой антенн многолучевые радиосигналы, включающие прямые и рассеянные радиосигналы, синхронно преобразуют принятые антеннами радиосигналы в цифровые сигналы, согласно изобретению, преобразуют цифровой сигнал каждой антенны в откорректированный по временной задержке и доплеровскому сдвигу частоты для известного состояния передатчика цифровой сигнал sn, где  - номер антенны, объединяют откорректированные цифровые сигналы Sn в матрицу откорректированных сигналов Φ, которую запоминают и преобразуют в пространственную корреляционную матрицу откорректированных сигналов G=ΦHΦ, находят наибольшее собственное значение λmax корреляционной матрицы откорректированных сигналов G, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал Λ(k)=Λ(k-1)(G/λmax), где k=1, 2, … - номер итерации, Λ(0)=I - единичная матрица, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего фиксируют текущий номер итерации kt и формируют прямой цифровой сигнал
- номер антенны, объединяют откорректированные цифровые сигналы Sn в матрицу откорректированных сигналов Φ, которую запоминают и преобразуют в пространственную корреляционную матрицу откорректированных сигналов G=ΦHΦ, находят наибольшее собственное значение λmax корреляционной матрицы откорректированных сигналов G, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал Λ(k)=Λ(k-1)(G/λmax), где k=1, 2, … - номер итерации, Λ(0)=I - единичная матрица, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего фиксируют текущий номер итерации kt и формируют прямой цифровой сигнал  , где E - вектор столбец из N единиц, который запоминают, формируют нормированный коэффициент взаимной корреляции
, где E - вектор столбец из N единиц, который запоминают, формируют нормированный коэффициент взаимной корреляции  между прямым цифровым сигналом u и откорректированным цифровым сигналом sn каждой антенны, получают разностный цифровой сигнал каждой антенны
между прямым цифровым сигналом u и откорректированным цифровым сигналом sn каждой антенны, получают разностный цифровой сигнал каждой антенны  , преобразуют разностный цифровой сигнал каждой антенны
, преобразуют разностный цифровой сигнал каждой антенны  в откорректированный по временной задержке и доплеровскому сдвигу частоты на заданном множестве гипотетических состояний объектов разностный цифровой сигнал
в откорректированный по временной задержке и доплеровскому сдвигу частоты на заданном множестве гипотетических состояний объектов разностный цифровой сигнал  , откорректированные разностные цифровые сигналы всех антенн объединяют в матрицу разностных сигналов
, откорректированные разностные цифровые сигналы всех антенн объединяют в матрицу разностных сигналов  , которую преобразуют в пространственную корреляционную матрицу разностных сигналов
, которую преобразуют в пространственную корреляционную матрицу разностных сигналов  , находят наибольшее собственное значение корреляционной матрицы разностных сигналов
, находят наибольшее собственное значение корреляционной матрицы разностных сигналов  , после сравнения которого с порогом принимают решение об обнаружении подвижного объекта с текущим гипотетическим состоянием объекта.
, после сравнения которого с порогом принимают решение об обнаружении подвижного объекта с текущим гипотетическим состоянием объекта.
Операции способа поясняются чертежами:
фиг.1 - структурная схема устройства поиска малозаметных подвижных объектов;
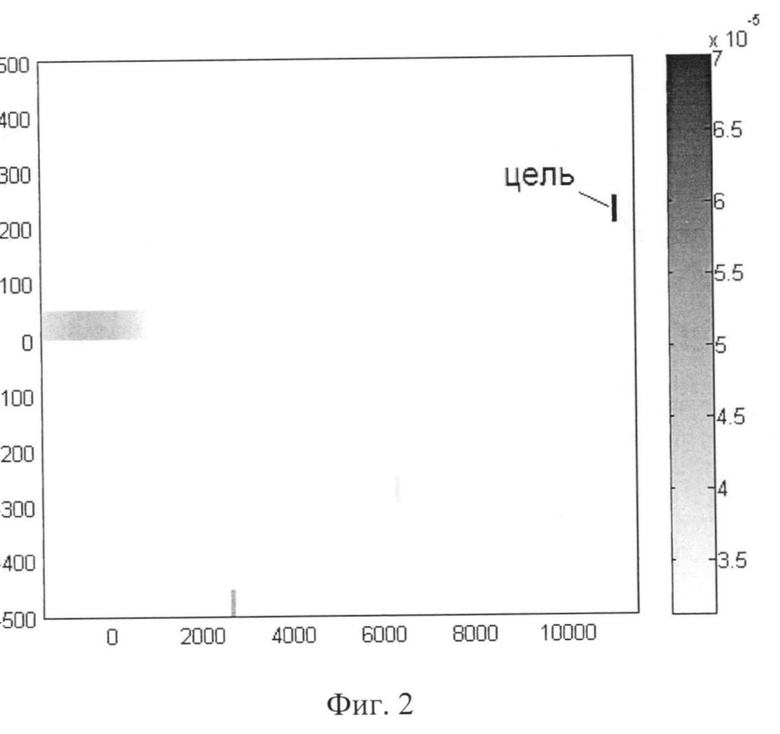
фиг.2 - результаты моделирования процесса поиска малозаметных подвижных объектов предложенным способом;
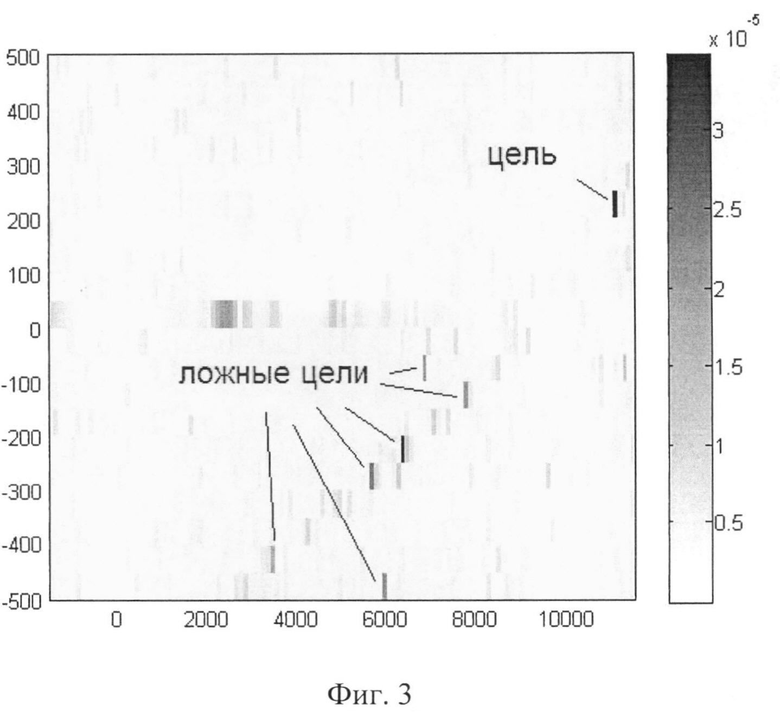
фиг.3 - результаты моделирования процесса поиска малозаметных подвижных объектов при использовании способа-прототипа.
Устройство, в котором реализуется предложенный способ поиска малозаметных подвижных объектов, включает последовательно соединенные антенную систему 1, N-канальный преобразователь частоты (ПРЧ) 2, N-канальное устройство квадратурной дискретизации 3, вычислитель 4 и устройство отображения 5. В свою очередь вычислитель 4 включает устройство сдвига 4-1, формирователь разностных сигналов 4-2, устройство сдвига 4-3, устройство обнаружения 4-4. Устройство сдвига 4-1 и ПРЧ 2 имеют связь с внешними системами для получения информации о параметрах излучения выбранного передатчика подсвета. Кроме этого, устройство сдвига 4-1 получает от внешних систем информацию о состоянии передатчика подсвета в виде: пространственных координат, направления и скорости движения при выборе подвижного передатчика или только пространственных координат при выборе стационарного передатчика. Связь с внешними системами с целью упрощения не показана.
Антенная система 1 содержит N антенн с номерами n=1…N, объединенных в решетку. Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
Полоса пропускания каждого канала многоканального ПРЧ 2 обеспечивает прием широкополосного сигнала. Кроме того, многоканальные ПРЧ 2 и устройство 3 выполнены с общим гетеродином, который обеспечивает когерентный прием радиосигналов. Для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности ПРЧ 2 обеспечивает подключение одной из антенн, вместо всех антенн решетки. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов. Если разрядность и быстродействие АЦП, входящих в состав устройства 3, достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то вместо ПРЧ 2 могут использоваться частотно избирательный полосовой фильтр и усилитель. Другими словами, аналоговая часть устройства, реализующего предлагаемый способ, может быть построена по принципу прямого усиления.
Устройство, реализующее предложенный способ, работает следующим образом.
После получения информации о параметрах излучения выбранного передатчика подсвета ПРЧ 2 настраивается на частоту радиосигнала подсвета.
Многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика, когерентно принимаются пространственно разнесенными приемными антеннами решетки 1. Принятый каждой антенной решетки 1 зависящий от времени t суммарный радиосигнал sn(t) в ПРЧ 2 когерентно переносится на более низкую частоту.
Сформированный в ПРЧ 2 ансамбль принятых радиосигналов sn(t) синхронно преобразуется в устройстве 3 в ансамбль комплексных цифровых сигналов 

Кроме этого, в устройстве 4-1 выполняются следующие действия: - преобразуется цифровой сигнал каждой антенны в откорректированный по временной задержке и доплеровскому сдвигу частоты для известного состояния передатчика цифровой сигнал sn.
При этом учитывается поступающая от внешних систем информация о состоянии передатчика в виде текущих пространственных координат, направления и скорости его движения, если выбран подвижный передатчик, и в виде только пространственных координат, если выбран стационарный передатчик.
Преобразование осуществляется известным способом [3].
Так, по пространственным координатам передатчика рассчитывается ожидаемое значение временной задержки τn, а по направлению и скорости движения передатчика вычисляется ожидаемое значение доплеровского сдвига частоты ln сигнала, принятого каждой n-й антенной. После этого, каждый отсчет 

- объединяются откорректированные для известного пространственного положения передатчика цифровые сигналы sn в матрицу откорректированных сигналов Ц=(s1,…,sN) размером Z×N. Матрица откорректированных сигналов Ц поступает в формирователь 4-2.
В формирователе 4-2 выполняются следующие действия:
- матрица откорректированных сигналов Ц запоминается и преобразуется в N×N пространственную - корреляционную матрицу откорректированных сигналов G=ЦHЦ;
- находится наибольшее собственное значение λmax корреляционной матрицы откорректированных сигналов G.
Наибольшее собственное значение матрицы G находится известными способами [4, 5], например, как наибольший корень λmax полинома det(G-λI), где det - детерминант, I - единичная матрица.
- итерационно формируется зависящий от предыдущего решения вспомогательный матричный сигнал Λ(k)=Λ(k-1)(G/λmax), где k=1, 2, … - номер итерации, Λ(0)=I - единичная матрица, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения;
- после чего фиксируется текущий номер итерации kt и формируется прямой цифровой сигнал  , где E - вектор столбец из N единиц.
, где E - вектор столбец из N единиц.
При формировании вспомогательного матричного сигнала на первой итерации формируется сигнал G/λmax, a затем находится и запоминается первое приближение сигнала частотно-временного изображения, то есть Λ(1)=Λ(0)(G/λmax)=I(G/λmax), так как Λ(k-1)=Λ(0)=I при k=1, на второй итерации используют приближение, полученное на первой итерации, то есть Λ(2)=Λ(1)(G/λmax) при k=2 и т.д.
Таким образом, на первой (k=1) и последующих (k=2, 3, …) итерациях вспомогательный матричный сигнал Λ(k) выражается через вспомогательный матричный сигнал Λ(k-1), полученный на предыдущей итерации.
На каждой итерации сравнивается энергия разности частотно-временных изображений  , где
, где  - евклидова норма вектора, полученных на текущей и предыдущей итерации, с порогом δ. Значение порога выбирается, например, из условия
- евклидова норма вектора, полученных на текущей и предыдущей итерации, с порогом δ. Значение порога выбирается, например, из условия  .
.
При невыполнении условия  инициализируется очередная итерация синтеза частотно-временного изображения, на которой номер итерации k увеличивают на единицу, и повторяются операции формирования сигнала Λ(k)=Λ(k-1)(G/λmax), его запоминания и сравнения энергии разности частотно-временных изображений
инициализируется очередная итерация синтеза частотно-временного изображения, на которой номер итерации k увеличивают на единицу, и повторяются операции формирования сигнала Λ(k)=Λ(k-1)(G/λmax), его запоминания и сравнения энергии разности частотно-временных изображений  с порогом δ. При выполнении условия
с порогом δ. При выполнении условия  фиксируется текущий номер итерации kt, формируется и запоминается прямой цифровой сигнал u.
фиксируется текущий номер итерации kt, формируется и запоминается прямой цифровой сигнал u.
Кроме этого в формирователе 4-2 осуществляются следующие операции:
- формируется нормированный коэффициент взаимной корреляции  между прямым цифровым сигналом u и откорректированным цифровым сигналом sn каждой антенны;
между прямым цифровым сигналом u и откорректированным цифровым сигналом sn каждой антенны;
- получается разностный цифровой сигнал каждой антенны  .
.
Полученный в формирователе 4-2 разностный цифровой сигнал каждой антенны  поступает в устройство 4-3.
поступает в устройство 4-3.
В устройстве 4-3 разностный цифровой сигнал каждой антенны преобразуется в откорректированный по временной задержке τn и доплеровскому сдвигу частоты ωdn на заданном множестве гипотетических состояний объектов разностный цифровой сигнал  .
.
Преобразование разностного цифрового сигнала каждой антенны в откорректированный разностный цифровой сигнал также осуществляется известным способом [3]. При этом отдельное гипотетическое состояние объекта описывается несколькими величинами: ожидаемыми пространственными координатами, направлением и скоростью движения подвижного объекта.
После этого в устройстве 4-3 откорректированные разностные цифровые сигналы 


Полученная в устройстве 4-3 пространственная корреляционная матрица разностных сигналов 
В устройстве 4-4 находится наибольшее собственное значение пространственной корреляционной матрицы разностных сигналов 
Найденное наибольшее собственное значение матрицы
Для оценки сравнительной эффективности устройства, реализующего предложенный способ, выполнено моделирование на ПЭВМ.
Моделирование выполнялось с использованием полунатурных данных, построенных на основе измеренного сигнала звукового сопровождения аналогового телевидения на частоте 229.75 МГц, который играл роль сигнала подсвета цели.
На фиг.2 и фиг.3 представлены частотно-временные изображения рассеянных объектами радиосигналов, сформированные предложенным способом и способом-прототипом соответственно. Оба сравниваемых способа обеспечивают обнаружение сигнала объекта в точке с координатами (11000 м, 200 м). Однако на полученном способом-прототипом изображении наблюдается множество ложных целей.
Отсюда следует, что предложенный способ обеспечивает формирование более качественного радиоизображения. Это снижает вероятность ложных тревог и вероятность пропуска целей и, как следствие, повышает эффективность поиска малозаметных подвижных объектов.
Таким образом, за счет применения новых операций, обеспечивающих максимизацию выходного отношения сигнал/шум и основанных на нахождении наибольших собственных значений корреляционных матриц, используемых при формировании и компенсации являющегося когерентной помехой прямого сигнала передатчика подсвета, а также при выделении и оптимальном когерентном обнаружении полезных сигналов, полученных после компенсации помехи и откорректированных на заданном множестве гипотетических пространственных координат, направлений и скоростей движения объектов, удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. US, патент, 6703968 В2, кл. G01S 13/87, 2004 г.
2. RU, патент, 2 444 754, кл. G01S 13/02, 2012 г.
3. Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К.Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. М.: «Сов. Радио», 1976, 456 с.
4. Уилкисон Дж. X. Алгебраическая проблема собственных значений. - М.: Наука, 1970. 564 с.
5. Марпл С.Л. (мл.). Цифровой спектральный анализ и его приложения. М.: «Мир», 1990. 584 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2534222C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2522170C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471200C1 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2770176C1 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Достигаемый технический результат - повышение эффективности поиска малозаметных подвижных объектов. Повышение эффективности поиска малозаметных подвижных объектов достигается за счет применения новых операций, обеспечивающих максимизацию выходного отношения сигнал/шум и основанных на нахождении наибольших собственных значений корреляционных матриц, используемых при компенсации когерентной помехи в виде прямого сигнала передатчика подсвета, а также при обнаружении полезных сигналов, полученных после компенсации помехи и откорректированных на заданном множестве гипотетических пространственных координат, направлений и скоростей движения объектов. 3 ил.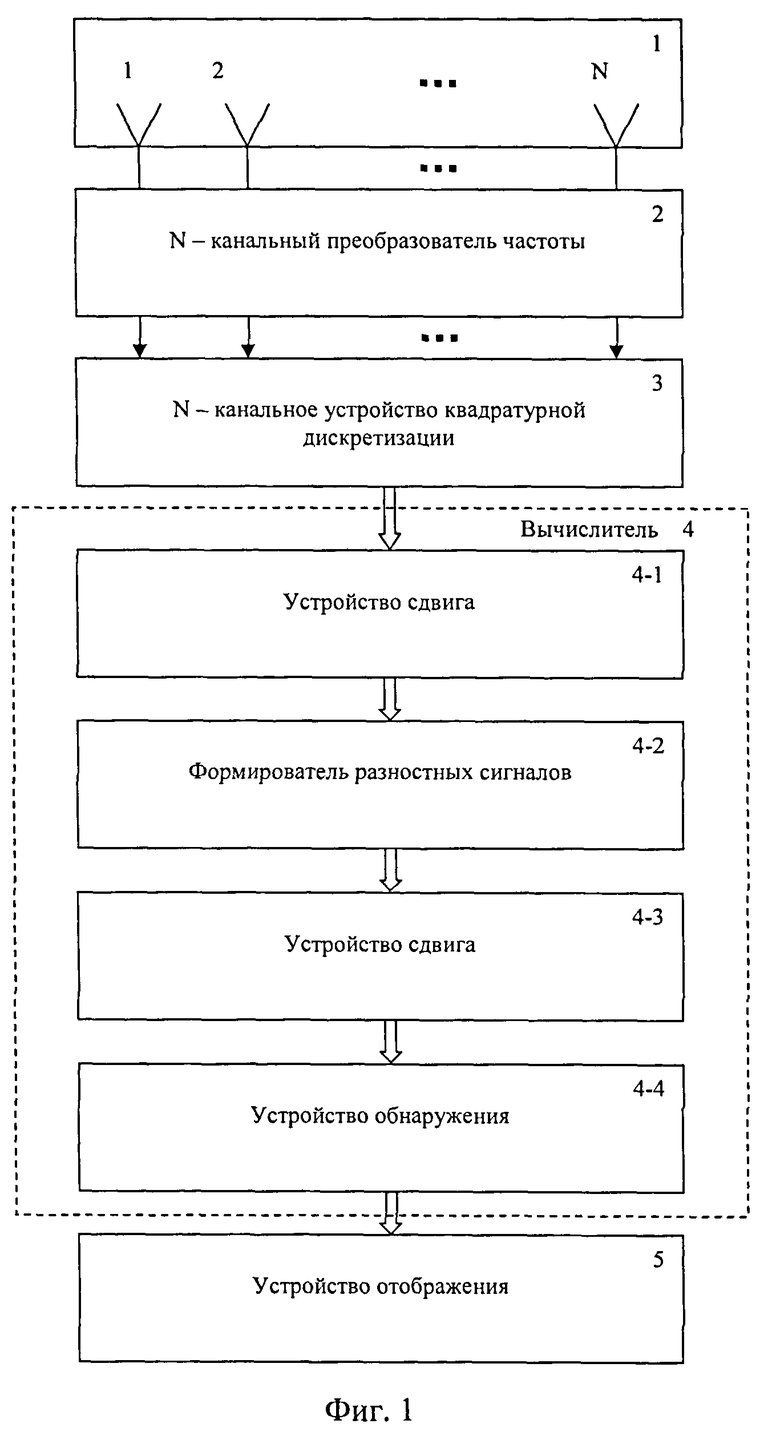
Способ поиска малозаметных подвижных объектов, заключающийся в том, что используют прямые и рассеянные подвижными объектами широкополосные радиосигналы, излучаемые передатчиками радиоэлектронных систем различного назначения, когерентно принимают решеткой антенн многолучевые радиосигналы, включающие прямые и рассеянные радиосигналы, синхронно преобразуют принятые антеннами радиосигналы в цифровые сигналы, отличающийся тем, что преобразуют цифровой сигнал каждой антенны в откорректированный по временной задержке и доплеровскому сдвигу частоты для известного состояния передатчика цифровой сигнал sn, где - номер антенны, объединяют откорректированные цифровые сигналы sn в матрицу откорректированных сигналов Φ, которую запоминают и преобразуют в пространственную корреляционную матрицу откорректированных сигналов G=ΦHΦ, находят наибольшее собственное значение λmax корреляционной матрицы откорректированных сигналов G, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал Λ(k)=Λ(k-1)(G/λmax), где k=1, 2, … - номер итерации, Λ(0)=I - единичная матрица, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего фиксируют текущий номер итерации kt и формируют прямой цифровой сигнал  , где E - вектор столбец из N единиц, который запоминают, формируют нормированный коэффициент взаимной корреляции
, где E - вектор столбец из N единиц, который запоминают, формируют нормированный коэффициент взаимной корреляции  между прямым цифровым сигналом u и откорректированным цифровым сигналом sn каждой антенны, получают разностный цифровой сигнал каждой антенны
между прямым цифровым сигналом u и откорректированным цифровым сигналом sn каждой антенны, получают разностный цифровой сигнал каждой антенны  , преобразуют разностный цифровой сигнал каждой антенны
, преобразуют разностный цифровой сигнал каждой антенны  в откорректированный по временной задержке и доплеровскому сдвигу частоты на заданном множестве гипотетических состояний объектов разностный цифровой сигнал
в откорректированный по временной задержке и доплеровскому сдвигу частоты на заданном множестве гипотетических состояний объектов разностный цифровой сигнал  , откорректированные разностные цифровые сигналы всех антенн объединяют в матрицу разностных сигналов
, откорректированные разностные цифровые сигналы всех антенн объединяют в матрицу разностных сигналов  , которую преобразуют в пространственную корреляционную матрицу разностных сигналов
, которую преобразуют в пространственную корреляционную матрицу разностных сигналов  , находят наибольшее собственное значение корреляционной матрицы разностных сигналов , после сравнения которого с порогом, принимают решение об обнаружении подвижного объекта с текущим гипотетическим состоянием объекта.
, находят наибольшее собственное значение корреляционной матрицы разностных сигналов , после сравнения которого с порогом, принимают решение об обнаружении подвижного объекта с текущим гипотетическим состоянием объекта.
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕКАМЕТРОВОГО ДИАПАЗОНА | 2009 |
|
RU2408895C2 |
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| JP 6213943 A, 05.08.1994 | |||
| US 5923285 A1, 29.03.2006 | |||
| WO 2003079041 A3, 25.09.2003 | |||
| EP 1471364 A2, 27.10.2004 | |||

