Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Технология скрытного обнаружения и слежения за подвижными объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения, пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ скрытного обнаружения радиомолчащих объектов [1], заключающийся в том, что принимают решеткой из N антенн прямые и рассеянные объектами радиосигналы широкополосных передатчиков радиоэлектронных систем различного назначения, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в прямой и рассеянные сигналы для выбранных азимутально-угломестных направлений приема, которые совместно со значением азимутально-угломестного направления приема запоминают, преобразуют прямой сигнал в многочастотный матричный сигнал комплексной фазирующей функции, включающий гипотетические сигналы, рассеиваемые потенциальными стационарными и подвижными объектами в ожидаемой области задержек на всех ожидаемых частотах доплеровского сдвига, запоминают многочастотный матричный сигнал, для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный цифровой и многочастотный матричный сигнал в сигнал комплексного частотно-временного изображения, после чего по локальным максимумам квадрата модуля элементов частотно-временного изображения определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значению временной задержки, доплеровского сдвига каждого рассеянного радиосигнала и значению азимутально-угломестного направления приема рассеянных радиосигналов - выполняют обнаружение и пространственную локализацию подвижных объектов
Данный способ обеспечивает обнаружение широкого класса объектов. Однако из-за большой размерности многочастотного матричного сигнала комплексной фазирующей функции при реализации данного способа требуется очень большой объем вычислительных операций.
Более эффективным является способ скрытного обнаружения радиомолчащих объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
принимают решеткой из N антенн прямые и рассеянные объектами радиосигналы широкополосных передатчиков радиоэлектронных систем различного назначения,
синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в прямой s и рассеянные sl сигналы для выбранных азимутально-угломестных направлений приема l, которые совместно со значением азимутально-угломестного направления приема запоминают,
преобразуют прямой сигнал s в двухчастотные матричные сигналы комплексной фазирующей функции А, каждый из которых включает гипотетические сигналы, рассеиваемые потенциальными стационарными и подвижными объектами в ожидаемой области задержек на нулевой ω=0 и ожидаемой ω частоте доплеровского сдвига, матричные сигналы А запоминают,
для каждого выбранного азимутально-угломестного направления приема и каждого ожидаемого значения доплеровского сдвига частоты преобразуют рассеянный сигнал sl сигнал элемента комплексного частотно-временного изображения  , где АH - матрица, эрмитово сопряженная с А,
, где АH - матрица, эрмитово сопряженная с А,
сигнал  запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал
запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал  где
где  - z-я компонента вектора элемента изображения
- z-я компонента вектора элемента изображения  , k=1,2,… - номер итерации, и сигнал очередного приближения элемента комплексного частотно-временного изображения
, k=1,2,… - номер итерации, и сигнал очередного приближения элемента комплексного частотно-временного изображения  , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог K,
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог K,
объединяют сформированные сигналы элементов изображения  в матричный сигнал результирующего комплексного частотно-временного изображения Нl,
в матричный сигнал результирующего комплексного частотно-временного изображения Нl,
после чего, по локальным максимумам квадрата модуля матричного сигнала результирующего изображения  , где Нωql - ωq-я компонента матричного сигнала результирующего изображения Нl, определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов - выполняют обнаружение и пространственную локализацию объектов.
, где Нωql - ωq-я компонента матричного сигнала результирующего изображения Нl, определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов - выполняют обнаружение и пространственную локализацию объектов.
Способ-прототип благодаря формированию совокупности двухчастотных матричных сигналов комплексной фазирующей функции А=[А0,Аω], где А0 - подматрица одночастотного матричного сигнала на нулевой частоте ω=0 доплеровского сдвига, а Аω - подматрица одночастотного матричного сигнала на ожидаемой частоте ω доплеровского сдвига, вместо имеющего более высокую размерность и требующего значительно большего количества вычислительных операций одного многочастотного матричного сигнала, обладает по сравнению с аналогом более высоким быстродействием.
Однако быстродействие способа-прототипа снижается с увеличением диапазона контролируемых задержек (дальностей) и диапазона частот доплеровского сдвига (скоростей перемещения обнаруживаемых объектов) и недостаточно для реализации операций обнаружения и пространственной локализации объектов различных классов в реальном масштабе времени на существующей вычислительной базе.
Учитывая, что вычислительная сложность преобразования матричных сигналов существенно зависит от размера матриц, повышение быстродействия способа-прототипа возможно дальнейшим уменьшением размерности каждого матричного сигнала комплексной фазирующей функции по частоте доплеровского сдвига.
Кроме того, у способа-прототипа отсутствуют операции компенсации прямого сигнала подсвета и рассеянных стационарными объектами сигналов. Как следствие, прямой сигнал и рассеянные стационарными объектами сигналы маскируют эхо-сигналы малоразмерных низкоскоростных подвижных объектов, что ограничивает чувствительность их обнаружения.
Таким образом, недостатком способа-прототипа является низкая эффективность (ограниченные чувствительность и быстродействие) обнаружения радиомолчащих объектов.
Техническим результатом изобретения является повышение эффективности (чувствительности и быстродействия) скрытного обнаружения радиомолчащих объектов.
Повышение эффективности (чувствительности и быстродействия) скрытного обнаружения радиомолчащих объектов достигается за счет применения новых операций:
- очистки обнаруживаемых эхо-сигналов подвижных объектов путем компенсации маскирующих помех в виде прямого сигнала подсвета и рассеянных стационарными объектами сигналов;
- формирования совокупности одночастотных матричных сигналов комплексной фазирующей функции вместо совокупности, имеющих более высокую размерность двухчастотных матричных сигналов комплексной фазирующей функции.
Технический результат достигается тем, что в способе скрытного обнаружения радиомолчащих объектов, заключающемся в том, что принимают решеткой из N антенн прямые и рассеянные объектами радиосигналы широкополосных передатчиков радиоэлектронных систем различного назначения, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в прямой s и рассеянные sl сигналы для выбранных азимутально-угломестных направлений приема l, которые совместно со значением азимутально-угломестного направления приема запоминают, согласно изобретению, преобразуют прямой сигнал s в одночастотные матричные сигналы комплексной фазирующей функции Аω, каждый из которых включает гипотетические сигналы, рассеиваемые потенциальными стационарными и подвижными объектами в ожидаемой области задержек на одной из ожидаемых частот доплеровского сдвига ω, матричные сигналы Аω запоминают, для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал sl в сигнал элемента комплексного частотно-временного изображения для нулевого значения ω=0 доплеровского сдвига частоты  , где
, где  - матрица, эрмитово сопряженная с А0, с использованием сигнала
- матрица, эрмитово сопряженная с А0, с использованием сигнала  в качестве начального приближения итерационно формируют и запоминают зависящий от предыдущего решения вспомогательный матричный сигнал
в качестве начального приближения итерационно формируют и запоминают зависящий от предыдущего решения вспомогательный матричный сигнал  , где
, где  - z-я компонента вектора элемента изображения
- z-я компонента вектора элемента изображения  , k=1,2,… - номер итерации, а также сигнал очередного приближения элемента комплексного частотно-временного изображения
, k=1,2,… - номер итерации, а также сигнал очередного приближения элемента комплексного частотно-временного изображения  , где λ - множитель Лагранжа, и очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал
, где λ - множитель Лагранжа, и очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал  до тех пор, пока номер текущей итерации не превысит заданный порог K, после этого из очищенного сигнала
до тех пор, пока номер текущей итерации не превысит заданный порог K, после этого из очищенного сигнала  для каждого ожидаемого ненулевого значения доплеровского сдвига частоты ω формируют сигнал начального приближения
для каждого ожидаемого ненулевого значения доплеровского сдвига частоты ω формируют сигнал начального приближения  , а затем итерационно получают и запоминают вспомогательный матричный сигнал
, а затем итерационно получают и запоминают вспомогательный матричный сигнал  и сигнал очередного приближения
и сигнал очередного приближения  элемента очищенного комплексного частотно-временного изображения до тех пор, пока номер текущей итерации не превысит заданный порог K, объединяют сформированные сигналы элементов очищенного изображения
элемента очищенного комплексного частотно-временного изображения до тех пор, пока номер текущей итерации не превысит заданный порог K, объединяют сформированные сигналы элементов очищенного изображения  в матричный сигнал результирующего комплексного частотно-временного изображения Нl, после чего по локальным максимумам квадрата модуля матричного сигнала результирующего изображения
в матричный сигнал результирующего комплексного частотно-временного изображения Нl, после чего по локальным максимумам квадрата модуля матричного сигнала результирующего изображения  , где Hωql - ωq-я компонента матричного сигнала результирующего изображения Нl, определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов выполняют обнаружение и пространственную локализацию радиомолчащих объектов.
, где Hωql - ωq-я компонента матричного сигнала результирующего изображения Нl, определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов выполняют обнаружение и пространственную локализацию радиомолчащих объектов.
Операции способа поясняются чертежом.
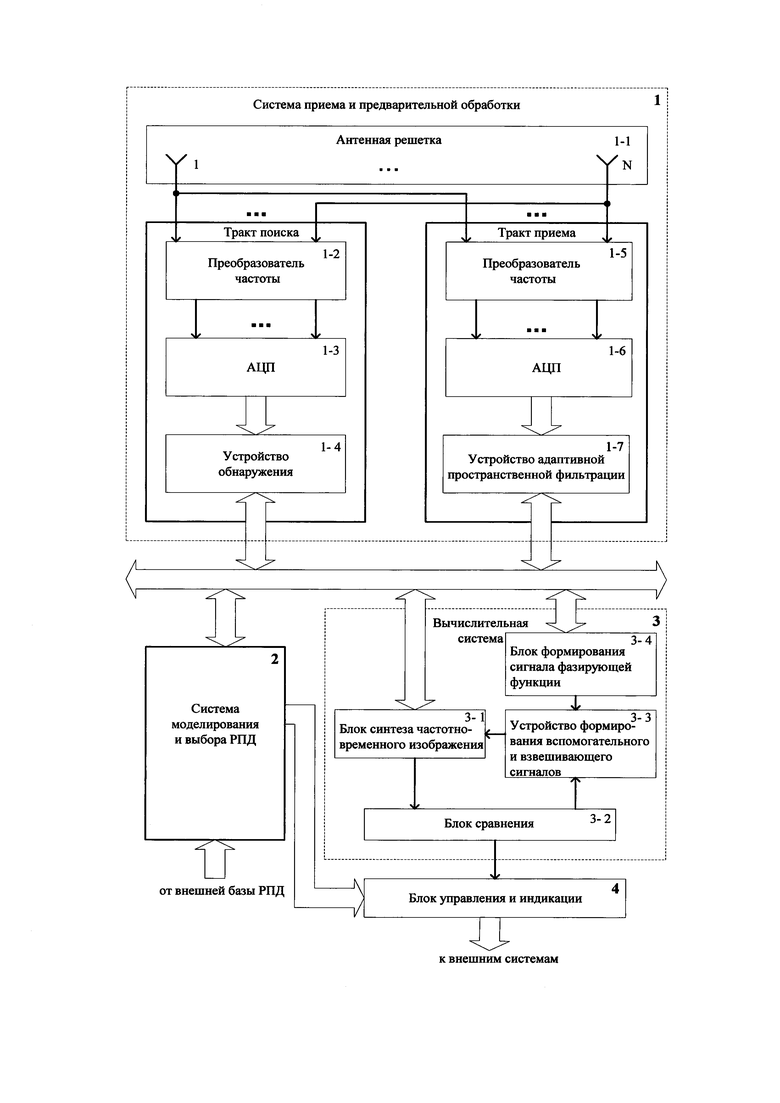
Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные систему приема и предварительной обработки 1, систему моделирования и выбора радиопередатчиков (РПД) 2, вычислительную систему 3 и блок управления и индикации 4.
В свою очередь система приема и предварительной обработки 1 включает антенную решетку 1-1, тракт поиска источников подсвета, включающий преобразователь частоты 1-2, аналого-цифровой преобразователь (АЦП) 1-3 и устройство обнаружения 1-4, а также тракт приема прямых и рассеянных сигналов, включающий преобразователь частоты 1-5, АЦП 1-6 и устройство адаптивной пространственной фильтрации 1-7.
Вычислительная система 3 включает блок синтеза частотно-временного изображения 3-1, блок сравнения 3-2, устройство формирования вспомогательного и взвешивающего сигнала 3-3 и блок формирования сигнала фазирующей функции 3-4. При этом система 2 соединена с входом блока 4, а также имеет интерфейс для соединения с внешней базой РПД. Кроме того, блок 4 имеет выход, предназначенный для подключения к внешним системам.
Подсистема 1 является аналогово-цифровым устройством и предназначена для поиска передатчиков подсвета объектов, излучающих радиосигналы с расширенным спектром, а также для адаптивной пространственной фильтрации полезных прямых и рассеянных радиосигналов.
Антенная решетка 1-1 состоит из N антенн с номерами  . Пространственная конфигурация антенной решетки должна обеспечивать прием с заданных азимутально-угломестных направлений прихода радиосигналов и может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
. Пространственная конфигурация антенной решетки должна обеспечивать прием с заданных азимутально-угломестных направлений прихода радиосигналов и может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
Преобразователи частоты 1-2 и 1-5 являются N - канальными, выполнены с общим гетеродином и с полосой пропускания каждого канала, изменяемой в соответствии с шириной спектра принимаемого радиосигнала. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов.
АЦП 1-3 и 1-6 также являются N - канальными и синхронизированы сигналом одного опорного генератора (для упрощения опорный генератор на схеме не показан). Если разрядность и быстродействие АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то вместо преобразователей частоты 1-2 и 1-5 могут использоваться частотно избирательные полосовые фильтры и усилители. Кроме этого, преобразователи частоты 1-2 и 1-5 обеспечивают подключение одной из антенн вместо всех антенн решетки для периодической калибровки приемных каналов по внешнему источнику сигнала. Возможна калибровка с использованием внутреннего генератора, выход которого также подключается вместо всех антенн для периодической калибровки каналов. С целью упрощения внутренний генератор не показан.
Устройство обнаружения 1-4 и устройство адаптивной пространственной фильтрации 1-7 представляют собой вычислительные устройства.
Подсистема 2 является вычислительным устройством и предназначена для идентификации, отбора и периодического обновления рабочего списка передатчиков радиосигналов с расширенным спектром, используемых для подсвета заданной области воздушного пространства.
Вычислительная система 3 предназначена для формирования сигнала фазирующей функции (блок 3-4), формирования вспомогательного и взвешивающего сигнала (устройство 3-3), сравнения числа итераций с заданным порогом (блок 3-2) и синтеза частотно-временного изображения рассеянных объектами радиосигналов (блок 3-1).
Устройство работает следующим образом.
В системе 2 на основе данных внешней базы радиопередатчиков, а также данных об обнаруженных радиопередатчиках подсвета, поступающих от устройства 1-4, с использованием программных средств моделирования идентифицируется, выбирается и периодически обновляется рабочий список передатчиков, излучающих радиосигналы с расширенным спектром. При моделировании оцениваются возможные зоны покрытия, вероятности обнаружения и достижимые точности локализации и идентификации объектов различного класса, которые могут быть обеспечены при различных вариантах размещения передатчиков относительно станции обнаружения-пеленгования.
Параметры выбранного множества передатчиков (номер, несущая частота, ширина спектра, его форма, мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно точки приема) запоминаются в подсистеме 2, поступают в блок 4, а также используются для настройки преобразователей 1-2 и 1-5. С целью упрощения цепи управления преобразователем не показаны.
По сигналам системы 2 преобразователь частоты 1-2 начинает перестраиваться с заданным темпом в заданном диапазоне частот поиска радиосигналов. При этом тракт поиска осуществляет поиск передатчиков подсвета, излучающих радиосигналы с расширенным спектром, на частотах дискретной сетки частот поиска. При этом принятый каждой антенной с номером n антенной решетки 1-1 зависящий от времени t радиосигнал sn(t) фильтруется по частоте и переносится на более низкую частоту в преобразователе 1-2. Сформированные в преобразователе 1-2 радиосигналы sn(t) преобразуются с помощью АЦП 1-3 в цифровые сигналы, которые поступают в устройство обнаружения 1-4, в котором на каждой частоте дискретной сетки частот поиска осуществляется обнаружение передатчиков подсвета. Функционирование устройства обнаружения 1-4 основано на широко известных способах радиоконтроля, например, [3].
Одновременно по сигналам системы 2 преобразователь частоты 1-5 перестраивается на заданную частоту приема. Тракт приема синхронно принимает на частоте приема многолучевые радиосигналы, включающие прямой радиосигнал выбранного передатчика с расширенным спектром и рассеянные объектами радиосигналы этого передатчика.
Принятый каждой антенной с номером n решетки 1-1 зависящий от времени t радиосигнал sn(t) фильтруется по частоте и переносится на более низкую частоту в преобразователе 1-5.
Сформированные в преобразователе 1-5 радиосигналы sn(t) синхронно преобразуются с помощью АЦП 1-6 в цифровые сигналы  , где
, где  - номер временного отсчета сигнала,
- номер временного отсчета сигнала,  - означает транспонирование.
- означает транспонирование.
Цифровые сигналы отдельных антенн sn поступают в устройство 1-7, где объединяются в матричный цифровой сигнал  и запоминаются. Матричный сигнал S имеет размерность N × I.
и запоминаются. Матричный сигнал S имеет размерность N × I.
Кроме того, в устройстве 1-7 выполняются следующие действия:
- из матричного цифрового сигнала S формируется сигнал пространственной корреляционной матрицы R размером N × N;
- сигнал корреляционной матрицы R преобразуется в N × 1 векторные сигналы оптимальных весовых коэффициентов  и
и  для формирования прямого и рассеянных радиосигналов, соответственно, где v - вектор наведения размером N × l, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны (частотой) и геометрией решетки, l - азимутально-угломестное направление приема рассеянного радиосигнала,
для формирования прямого и рассеянных радиосигналов, соответственно, где v - вектор наведения размером N × l, определяемый азимутально-угломестным направлением приема радиосигнала, длиной волны (частотой) и геометрией решетки, l - азимутально-угломестное направление приема рассеянного радиосигнала,
- матричный цифровой сигнал S преобразуется в прямой sT=wHS и рассеянные  сигналы, где (⋅)H - символ эрмитова сопряжения.
сигналы, где (⋅)H - символ эрмитова сопряжения.
Физически описанные операции адаптивной пространственной фильтрации обеспечивают одновременный направленный прием с заданных направлений полезного прямого сигнала выбранного передатчика подсвета и полезного рассеянного сигнала с одновременным подавлением широкого класса помех, приходящих с других направлений. Отметим, что технически реализуемая глубина подавления помехи достигает величины 40 дБ [4]. Это обеспечивает выигрыш в чувствительности при формировании слабых рассеянных сигналов на последующих этапах обработки.
Сформированные в устройстве 1-7 рассеянные сигналы совместно sl значением выбранного азимутально-угломестного направления их приема поступают в блок 3-1, а прямой сигнал s поступает в блок 3-4, где запоминаются.
После этого, в блоке 3-4 прямой сигнал s преобразуется в одночастотные матричные сигналы комплексной фазирующей функции Аω, каждый из которых включает гипотетические сигналы, рассеиваемые потенциальными объектами в ожидаемой области задержек на одной из ожидаемых частот доплеровского сдвига ω. Матричные сигналы Аω поступают в устройство 3-3, где также запоминаются.
Преобразование прямого сигнала s в матричный сигнал Аω осуществляется по следующей формуле: Аω=Dω[s0,…,sq,…,sQ-1], где sq=[s(1-q),…,s(I-q)]T - векторы размером I × 1, являющиеся задержанными по времени на qTs версиями опорного сигнала s, q=0,…,Q-1, Q - число временных задержек прямого сигнала, Ts - период выборки сигнала; 
- матрицы доплеровских сдвигов, ω=0,±1,…,±Ω, (2Ω+1) - размер координатной сетки по доплеровскому сдвигу. Значения доплеровского сдвига частоты пробегают дискретный ряд значений ω/(ITs).
Таким образом, столбцы матрицы Аω представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии прямого сигнала s, а размер этой матрицы I × Q, определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию.
Кроме того, в устройстве 3-3 из сигнала Аω последовательно вычисляются сигналы  и
и  , которые поступают в блок 3-1, где запоминаются.
, которые поступают в блок 3-1, где запоминаются.
В блоке 3-1 для каждого выбранного азимутально-угломестного направления приема l рассеянный сигнал sl с использованием сигналов  и
и  , поступивших от блока 3-3, преобразуется в сигнал элемента комплексного частотно-временного изображения для нулевого значения ω=0 доплеровского сдвига частоты
, поступивших от блока 3-3, преобразуется в сигнал элемента комплексного частотно-временного изображения для нулевого значения ω=0 доплеровского сдвига частоты  , (вектор с размером Q × 1).
, (вектор с размером Q × 1).
Полученный в блоке 3-1 сигнал элемента изображения  запоминается в блоке 3-2 в качестве начального приближения и транслируется в устройство 3-3 для запоминания и инициализации очередной итерации с номером k=1.
запоминается в блоке 3-2 в качестве начального приближения и транслируется в устройство 3-3 для запоминания и инициализации очередной итерации с номером k=1.
В устройстве 3-3 с использованием сигнала элемента изображения, полученного на предыдущей итерации, то есть  =
=  при k=1, формируется зависящий от предыдущего решения вспомогательный матричный сигнал
при k=1, формируется зависящий от предыдущего решения вспомогательный матричный сигнал  где
где  - z-я компонента вектора элемента изображения
- z-я компонента вектора элемента изображения  , и взвешивающий сигнал
, и взвешивающий сигнал  . Значение множителя Лагранжа λ выбирают исходя из уровня шумов в каналах приема. Взвешивающий сигнал
. Значение множителя Лагранжа λ выбирают исходя из уровня шумов в каналах приема. Взвешивающий сигнал  поступает в блок 3-1.
поступает в блок 3-1.
В блоке 3-1 с использованием сигнала  и запомненного рассеянного сигнала sl синтезируется сигнал очередного приближения элемента комплексного частотно-временного изображения для нулевого значения ω=0 доплеровского сдвига частоты
и запомненного рассеянного сигнала sl синтезируется сигнал очередного приближения элемента комплексного частотно-временного изображения для нулевого значения ω=0 доплеровского сдвига частоты  и очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал
и очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал 
Сигнал  запоминается в блоке 3-1. Сигнал
запоминается в блоке 3-1. Сигнал  поступает в блок 3-2, где также запоминается для использования на следующей итерации. Кроме того сигнал
поступает в блок 3-2, где также запоминается для использования на следующей итерации. Кроме того сигнал  поступает в устройство 3-3 для запоминания и инициализации очередной итерации синтеза элемента частотно-временного изображения и очищенного сигнала.
поступает в устройство 3-3 для запоминания и инициализации очередной итерации синтеза элемента частотно-временного изображения и очищенного сигнала.
После чего, в устройстве 3-3, блоках 3-1 и 3-2 выполняется описанная ранее последовательность операций по формированию сигналов  ,
,  ,
,  ,
,  , запоминанию сигналов
, запоминанию сигналов  и
и  , а также сравнению номера текущей итерации с заданным порогом K.
, а также сравнению номера текущей итерации с заданным порогом K.
При превышении номером текущей итерации порога K в устройстве 3-3, блоках 3-1 и 3-2 из запомненных сигналов Аω,  ,
,  и
и  для каждого ожидаемого значения доплеровского сдвига частоты ω формируется сигнал начального приближения
для каждого ожидаемого значения доплеровского сдвига частоты ω формируется сигнал начального приближения  , а затем итерационно получаются и запоминаются вспомогательный матричный сигнал
, а затем итерационно получаются и запоминаются вспомогательный матричный сигнал  где
где  - z-я компонента вектора элемента изображения
- z-я компонента вектора элемента изображения  , и сигнал очередного приближения
, и сигнал очередного приближения  элемента очищенного комплексного частотно-временного изображения, до тех пор, пока номер текущей итерации не превысит заданный порог K.
элемента очищенного комплексного частотно-временного изображения, до тех пор, пока номер текущей итерации не превысит заданный порог K.
При превышении номером текущей итерации заданного порога K в блоке 3-1 сформированные сигналы элементов очищенного изображения  объединяются в матричный сигнал результирующего комплексного частотно-временного изображения Hl. Объединение элементов очищенного изображения
объединяются в матричный сигнал результирующего комплексного частотно-временного изображения Hl. Объединение элементов очищенного изображения  в матричный сигнал осуществляется путем присоединения элементов очищенного изображения
в матричный сигнал осуществляется путем присоединения элементов очищенного изображения  друг к другу в порядке убывания доплеровского сдвига частоты ω слева направо в соответствии со следующей формулой:
друг к другу в порядке убывания доплеровского сдвига частоты ω слева направо в соответствии со следующей формулой:

Матричный сигнал результирующего комплексного частотно-временного изображения Hl поступает в блок 4.
В блоке 4 вычисляются квадраты модулей  матричного сигнала Hl. По локальным максимумам квадратов модулей
матричного сигнала Hl. По локальным максимумам квадратов модулей  определяется число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов - выполняется обнаружение и пространственная локализацию радиомолчащих объектов.
определяется число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов - выполняется обнаружение и пространственная локализацию радиомолчащих объектов.
Обнаружение и определение пространственных координат объектов осуществляется известными способами, например, [2].
Кроме того, для повышения информативности в блоке 4 отображаются результаты обнаружения и пространственной локализации объектов.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение эффективности (чувствительности и быстродействия) скрытного обнаружения широкого класса радиомолчащих объектов.
Повышение чувствительности обнаружения и пространственной локализации широкого класса радиомолчащих объектов достигается за счет применения новых операций, обеспечивающих формирование очищенного комплексного частотно-временного изображения обнаруживаемых эхо-сигналов объектов путем компенсации маскирующих помех в виде прямого сигнала подсвета и рассеянных стационарными объектами сигналов.
Повышение быстродействия достигается за счет новых операций, осуществляющих формирование совокупности одночастотных матричных сигналов комплексной фазирующей функции с размерностью I × Q вместо совокупности имеющих более высокую размерность I × 2Q двухчастотных матричных сигналов комплексной фазирующей функции. Это приводит к замене матриц АHА с размером 2Q × 2Q на матрицы  с размером Q × Q, что сокращает в 23 раз объем вычислительных операций на этапах синтеза комплексных частотно-временных изображений эхо-сигналов объектов и, как следствие, обеспечивает возможность обнаружения и пространственной локализации в реальном масштабе времени на существующей вычислительной базе.
с размером Q × Q, что сокращает в 23 раз объем вычислительных операций на этапах синтеза комплексных частотно-временных изображений эхо-сигналов объектов и, как следствие, обеспечивает возможность обнаружения и пространственной локализации в реальном масштабе времени на существующей вычислительной базе.
Таким образом, за счет применения новых операций, обеспечивающих формирование очищенного от маскирующих помех комплексного частотно-временного изображения обнаруживаемых эхо-сигналов с меньшими вычислительными затратами, удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. RU, патент, 2 529 483 С1, кл. G01S 13/02, 2013 г.
2. RU, патент, 2 557 250 С1, кл. G01S 13/02, 2015 г.
3. RU, патент, 2 190 236, кл. G01S 5/04, 2002 г.
4. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь. 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ СКРЫТНОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2724923C2 |
| Способ пространственной локализации радиомолчащих объектов | 2020 |
|
RU2758585C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2546331C2 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Техническим результатом изобретения является повышение эффективности (чувствительности и быстродействия) скрытного обнаружения радиомолчащих объектов. Повышение эффективности достигается за счет применения новых операций компенсации маскирующих помех, а также операций формирования совокупности одночастотных матричных сигналов комплексной фазирующей функции вместо совокупности имеющих более высокую размерность двухчастотных матричных сигналов комплексной фазирующей функции. 1 ил.
Способ скрытного обнаружения радиомолчащих объектов, заключающийся в том, что принимают решеткой из N антенн прямые и рассеянные объектами радиосигналы широкополосных передатчиков радиоэлектронных систем различного назначения, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в прямой s и рассеянные sl сигналы для выбранных азимутально-угломестных направлений приема l, которые совместно со значением азимутально-угломестного направления приема запоминают, отличающийся тем, что преобразуют прямой сигнал s в одночастотные матричные сигналы комплексной фазирующей функции Аω, каждый из которых включает гипотетические сигналы, рассеиваемые потенциальными стационарными и подвижными объектами в ожидаемой области задержек на одной из ожидаемых частот доплеровского сдвига ω, матричные сигналы Аω запоминают, для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал sl в сигнал элемента комплексного частотно-временного изображения для нулевого значения ω=0 доплеровского сдвига частоты  , где
, где  - матрица, эрмитово сопряженная с А0, с использованием сигнала
- матрица, эрмитово сопряженная с А0, с использованием сигнала  в качестве начального приближения итерационно формируют и запоминают зависящий от предыдущего решения вспомогательный матричный сигнал
в качестве начального приближения итерационно формируют и запоминают зависящий от предыдущего решения вспомогательный матричный сигнал  где
где  - z-я компонента вектора элемента изображения
- z-я компонента вектора элемента изображения  k=1,2,… - номер итерации, а также сигнал очередного приближения элемента комплексного частотно-временного изображения
k=1,2,… - номер итерации, а также сигнал очередного приближения элемента комплексного частотно-временного изображения  , где λ - множитель Лагранжа, и очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал
, где λ - множитель Лагранжа, и очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал  до тех пор, пока номер текущей итерации не превысит заданный порог K, после этого из очищенного сигнала
до тех пор, пока номер текущей итерации не превысит заданный порог K, после этого из очищенного сигнала  для каждого ожидаемого ненулевого значения доплеровского сдвига частоты ω формируют сигнал начального приближения
для каждого ожидаемого ненулевого значения доплеровского сдвига частоты ω формируют сигнал начального приближения  а затем итерационно получают и запоминают вспомогательный матричный сигнал
а затем итерационно получают и запоминают вспомогательный матричный сигнал  и сигнал очередного приближения
и сигнал очередного приближения  элемента очищенного комплексного частотно-временного изображения до тех пор, пока номер текущей итерации не превысит заданный порог K, объединяют сформированные сигналы элементов очищенного изображения
элемента очищенного комплексного частотно-временного изображения до тех пор, пока номер текущей итерации не превысит заданный порог K, объединяют сформированные сигналы элементов очищенного изображения в матричный сигнал результирующего комплексного частотно-временного изображения Нl, после чего по локальным максимумам квадрата модуля матричного сигнала результирующего изображения
в матричный сигнал результирующего комплексного частотно-временного изображения Нl, после чего по локальным максимумам квадрата модуля матричного сигнала результирующего изображения  , где Нωql - ωq-я компонента матричного сигнала результирующего изображения Нl, определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов выполняют обнаружение и пространственную локализацию радиомолчащих объектов.
, где Нωql - ωq-я компонента матричного сигнала результирующего изображения Нl, определяют число рассеянных радиосигналов в выбранном азимутально-угломестном направлении, по параметрам которых - значениям временной задержки q, доплеровского сдвига частоты ω каждого рассеянного радиосигнала и азимутально-угломестного направления приема l рассеянных радиосигналов выполняют обнаружение и пространственную локализацию радиомолчащих объектов.
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2013 |
|
RU2542330C1 |
| БОЕВ С.Ф., ТИМОШЕНКО А.В., ЧЕБОТАРЬ И.В., БАЛДЫЧЕВ М.Т | |||
| Метод комплексного применения бортовых радиотехнических и радиолокационных средств для распознавания радиомолчащих воздушных объектов в условиях радиоэлектронного подавления // ЖУРНАЛ | |||

