Настоящее изобретение относится к креплению сканирующего измерительного зонда, к сенсорному блоку сканирующего измерительного зонда и к сканирующему зондовому микроскопу. Кроме того, изобретение относится к установке или снятию сенсорного блока сканирующего измерительного зонда на/с крепление.
В таких областях, как, например, сканирующая туннельная микроскопия, атомно-силовая микроскопия, и подобных способах используются атомно-острые наконечники для регистрации туннельных токов или сил, таких как электростатические силы, магнитные силы и т.д. между наконечником и зондируемой поверхностью. Поскольку для получения высококачественных изображений необходимы атомно-острые наконечники, спустя некоторое время требуется замена сенсора или сенсорного блока, включающего наконечник.
Поскольку такие сенсоры сканирующих измерительных зондов или сенсорные блоки сканирующих измерительных зондов, как правило, мелкие и хрупкие, с ними обычно обращаются осторожно. Кроме того, часто необходимо точное размещение сенсоров сканирующего измерительного зонда в креплении. Для этих условий были предложены различные крепления.
US 5,701,381 раскрывает установочное устройство для наконечника зонда сканирующего силового или туннельного микроскопа, в котором смещение наконечника из-за атомных сил или им подобных регистрируется с помощью интерферометрии. Для проведения интерферометрического измерения через уплотнительное кольцо пропускается оптическое волокно. Наконечник сканирующего зондового микроскопа расположен в модульной конструкции, содержащей лист, который может проскользнуть на обжимное кольцо. Наконечник расположен таким образом, что его свободный конец находится напротив выходного конца оптического волокна. Держатель уплотнительного кольца или само уплотнительное кольцо имеет упор, чтобы лист зацепился для достижения точного размещения. Лист может включать зажимные элементы, которые зажимаются на уплотнительном кольце с помощью зажимного болта.
US 2007/0180889 А1 описывает способ замены для сканирующих зондовых микроскопов, согласно которому кантеливер с наконечником свободным концом устанавливают на держателе кантеливера с помощью вакуума. Однако такой вид крепления кантеливера нельзя применять, если сканирующий зондовый микроскоп используется в вакууме.
WO 2005/034134 А1 описывает устройство зонда для растрового зондирующего инструмента, в котором кристалл, образующий два кантеливера, поддерживается зажимным устройством, которое совершает четыре поворота, совпадающих с наклонными гранями кристалла.
US 5,376,790 описывает подвижное крепление зонда, включающее патрон, который можно вдвинуть в крепление и закрепить с помощью пружинных зажимов, прижимающих патрон к шариками, которые взаимодействуют с элементами патрона для его точного размещения в головке крепления.
US 5,861,624 описывает систему атомно-силового микроскопа, который может быть встроен в или подсоединен к оптическому микроскопу. Описанный атомно-силовой микроскоп содержит основание, которое можно зажать между крепежным переходником и колпачком, закрутив колпачок на переходнике. Пружина отталкивает атомно-силовой микроскоп от колпачка. Установочный переходник затем может быть установлен на револьверную головку для объективов микроскопа.
С учетом упомянутого уровня техники задачей настоящего изобретения является создание эффективного крепления сенсорного блока сканирующего измерительного зонда и сенсорного блока сканирующего измерительного зонда для использования с упомянутым креплением. Еще одной задачей настоящего изобретения является создание эффективного сканирующего зондового микроскопа. Другой задачей настоящего изобретения является создание эффективного способа установки и снятия сенсорного блока сканирующего зонда на/с крепления.
Решение указанных задач обеспечивают крепление сенсорного блока сканирующего зонда, как заявлено в пункте 1 формулы изобретения, сенсорный блок сканирующего зонда, как заявлено в пункте 10 формулы изобретения, сканирующий зондовый микроскоп, как заявлено в пункте 12 формулы изобретения, и способ установки и снятия сенсорного блока сканирующего зонда на креплении, как заявлено в пунктах 13 и 14 формулы изобретения. Дополнительные пункты формулы изобретения содержат дальнейшие развития настоящего изобретения.
Относящееся к изобретению крепление для сенсорного блока сканирующего зонда содержит опору для сенсорного блока сканирующего зонда, которая образует плоскость в креплении. Кроме того, крепление содержит подвижные фиксирующие соединительные элементы, расположенные по краю опоры и выполненные с возможностью взаимодействия с соответствующим элементом в сенсорном блоке сканирующего зонда. Указанные фиксирующие соединительные элементы могут быть перемещены в первое положение, в котором они прикладывают усилие к сенсорному блоку сканирующего зонда, чтобы переместить блок в направлении опоры по нормали к указанной плоскости. Кроме того, фиксирующие элементы могут быть перемещены во второе положение, в котором они позволяют производить установку сенсорного блока сканирующего зонда на опору или снятие этого сенсорного блока с опоры в направлении вдоль нормали к указанной плоскости. Крепление предпочтительно выполняется подвижным. При этом плоскость в креплении образована тремя шариками, каждый фиксирующий соединительный элемент расположен на пружине или подвижном элементе, выполненном с возможностью смещения к центру опоры посредством упругой силы, а фиксирующие соединительные элементы равномерно распределены по краю опоры с такой симметрией, что усилие, действующее на указанный сенсорный блок сканирующего зонда в направлении опоры по нормали к указанной плоскости, представляет собой суперпозицию радиальной и параллельной сил по отношению к направлению установки, которые в сумме дают результирующую силу, действующую в направлении вдоль нормали. Одним из креплений, используемых для сенсорных блоков сканирующего зонда, является так называемое подвижное крепление, которое реализует способ крепления одного объекта относительно другого объекта с очень высокой воспроизводимостью размещения объектов друг относительно друга. Например, в таких подвижных креплениях три шарика могут определить плоскость, по отношению к которой будет выровнено положение второго тела с помощью трех пазов, в которые частично заходят шарики при креплении второй части конструкции относительно первой, тем самым фиксируя положение второй части относительно первой части. Пример подвижного крепления описан в US 5,376,790.
Настоящее изобретение основано на заключении, что при установке сенсорного блока в подвижном креплении вдоль направления, параллельного плоскости, образованной этим креплением, как описано в US 5,376,790, некоторые части сенсорного блока или крепления, такие как электрические контакты, могут быть повреждены при сдвиге по отношению к указанной плоскости из-за непреднамеренного контакта частей друг с другом. Такое повреждение маловероятно, если крепление сенсорного блока производится вдоль нормали к указанной плоскости. Кроме того, возможно снизить износ шариков в подвижном креплении. Кроме того, крепление вдоль нормали предоставляет возможность реализовать контакты в виде маленьких штырьков, с которыми было бы трудно иметь дело при вставке сенсорного блока путем перемещения его параллельно плоскости.
Удержание сенсорного блока сканирующего зонда в креплении после установки возможно выполнять перемещением фиксирующего соединительного элемента в первое положение, в котором он прямо или косвенно прикладывает усилие к сенсорному блоку, перемещающее его в положение, перпендикулярное указанной плоскости. Приложение косвенного усилия к сенсорному блоку может быть осуществлено, например, суперпозицией сил, выражающейся в результирующей силе, направленной вдоль нормали. Таким образом, крепление согласно настоящему изобретению снижает риск повреждения малоразмерных конструкций, расположенных на креплении или на устанавливаемом сенсорном блоке, даже если эти конструкции выступают над установочной поверхностью.
Фиксирующий соединительный элемент может располагаться на подвижном элементе, смещаемом упругой силой в центр опоры. Упругая сила может быть точно рассчитана с использованием пружины или какого-либо другого упругого элемента, обладающего подходящим коэффициентом упругости, таким образом, чтобы сила, приложенная к сенсорному блоку сканирующего зонда, имела высокую воспроизводимость по отношению к установленной вручную силе, например силе, устанавливаемой пользователей с помощью фиксирующего болта. На практике упомянутый подвижный элемент может включать упругосгибаемый рычажный элемент, который имеет неподвижную часть, положение которой относительно опоры зафиксировано, например, путем непосредственного прикрепления неподвижной части к опоре, и свободную часть, на которой расположен фиксирующий соединительный элемент. Упругосгибаемый рычажный элемент затем существенно вытягивается параллельно нормали к указанной плоскости, и ему придается такая форма, что он сдвигает свободную часть с фиксирующим соединительным элементом в центр опоры. Затем упругую силу обеспечивает упругость рычажного элемента. Поскольку подвижный элемент и элемент, обеспечивающий упругую силу, в данной реализации идентичны, число элементов для воплощения фиксирующего соединительного элемента, а следовательно, и сложность фиксирующего соединительного элемента могут быть небольшими.
Для снижения трения, особенно при использовании самого сенсорного блока сканирующего зонда для перемещения фиксирующего соединительного элемента из второго в первое положение против упругой силы, фиксирующему соединительному элементу можно придать вращательную симметрию относительно оси симметрии и установить его с возможностью вращения так, чтобы осями симметрии служили оси вращения и чтобы оси вращения были расположены перпендикулярно нормали к образованной в креплении плоскости, чтобы в процессе установки и снятия сенсорного блока приходилось преодолевать только трение качения, возникающее между фиксирующим соединительным элементом и сенсорным блоком.
Крепление может содержать по меньшей мере три подвижных фиксирующих соединительных элемента, которые равномерно распределены по краю опоры. Это позволяет прилагать к установленному сенсорному блоку силу, равномерно распределенную в плоскости, образованной в креплении.
В альтернативной конструкции крепление включает по меньшей мере одну кольцевую спиральную пружину, расположенную на периферии опоры с окружением этой опоры. Части витков, обращенные к центру опорной конструкции, образуют фиксирующие соединительные элементы. В этой конструкции при установке сенсорного блока сканирующего зонда спираль будет сжата, например, частью сенсорного блока, имеющей большие размеры, чем другие, так что внутренние части витков спирали, то есть части витков, обращенные к центру опоры, сдвинутся наружу во второе положение. Когда большая часть сенсорного блока пройдет через кольцевую спиральную пружину, спираль вернется обратно к исходному первому положению и не позволит более широкой части сенсорного блока выйти из опоры вдоль нормали благодаря составляющей силы, действующей параллельно нормали к указанной плоскости.
Несмотря на то, что принципиально фиксирующие соединительные элементы можно перемещать из первого положения во второе с помощью устанавливаемого или снимаемого сенсорного блока, предпочтительно, чтобы сенсорный блок можно было устанавливать или снимать без его контакта с фиксирующими соединительными элементами. Этого можно достичь с помощью приводящих элементов, приводящих в действие фиксирующие соединительные элементы, так что посредством приведения в действие приводящего элемента можно позволить фиксирующим соединительным элементам переместиться из первого положения во второе и наоборот. Поскольку при этом движение фиксирующих соединительных элементов обеспечивается не самим сенсорным блоком, а другими средствами, то возможно устанавливать и снимать сенсорный блок без какого-либо контакта с фиксирующими соединительными элементами до того, как сенсорный блок займет свое конечное положение. Следовательно, можно значительно снизить риск повреждения сенсорного блока и/или крепления в процессе установки или снятия сенсорного блока.
Если фиксирующий соединительный элемент расположен на подвижном элементе как описано выше, приводящие элементы могут быть расположены так, чтобы воздействовать на подвижный элемент и/или фиксирующий соединительный элемент и отгибать рычаг от центра опоры против упомянутой упругой силы, когда приводящий элемент приведен в действие.
Приводящий элемент может, в частности, перемещаться вперед и назад в направлении, параллельном нормали к указанной плоскости, образованной креплением. В такой конструкции возможно реализовать приводящий элемент, даже если пространство ограничено в боковом направлении. Приводящий элемент может включать по меньшей мере один направляющий элемент, действующий на указанные подвижный элемент и/или фиксирующий соединительный элемент и определяющий расстояние, на которое фиксирующий соединительный элемент сдвигается от центра опоры в зависимости от положения приводящего элемента при его движении назад и вперед.
Сенсорный блок сканирующего зонда согласно настоящему изобретению содержит сенсорный элемент и основание, к которому крепится сенсорный элемент. Кроме того, он может включать ручку, выступающую над основанием, чтобы держать сенсорный блок, не прикасаясь к хрупким его частям.
Основание включает по меньшей мере одну фиксирующую соединительную часть, которая служит для взаимодействия с фиксирующими соединительными элементами крепления данного изобретения. Указанная фиксирующая соединительная часть имеет размеры, выбранные таким образом, что она может пропустить фиксирующие соединительные элементы в перпендикулярном направлении, когда фиксирующие соединительные элементы находятся во втором положении, и не может пропустить ни одного фиксирующего соединительного элемента в перпендикулярном направлении, когда фиксирующий соединительный элемент находится в первом положении. Кроме того, размеры фиксирующей соединительной части выбраны такими, чтобы фиксирующие соединительные элементы могли прикладывать усилие к плоскости, образованной в креплении, в направлении нормали к указанной плоскости, когда фиксирующая соединительная часть прошла фиксирующие соединительные элементы в направлении указанной плоскости. В частности, основание может включать основание, которое содержит по меньшей мере одну часть края, которая образует указанную по меньшей мере одну фиксирующую соединительную часть. Диаметр пластины и толщина края могут быть выбраны такими, чтобы выполнить вышеуказанные условия. Сенсорный блок сканирующего зонда согласно настоящему изобретению выполнен с возможностью использования с креплением согласно настоящему изобретению, чтобы достичь преимущества крепления, описанные выше.
Сканирующий зондовый микроскоп согласно настоящему изобретению содержит крепление согласно настоящему изобретению. Преимущества такого сканирующего зондового микроскопа обусловлены непосредственно использованием крепления согласно настоящему изобретению и, таким образом, идентичны уже описанным преимуществам крепления.
В соответствии с еще одним аспектом настоящего изобретения способ установки или снятия сенсорного блока сканирующего зонда согласно настоящему изобретению на/с крепление согласно настоящему изобретению включает шаги, заключающиеся в перемещении фиксирующих соединительных элементов из первого положения во второе, установки или снятия сенсорного блока сканирующего зонда вдоль нормали к плоскости, образованной в креплении, и перемещении фиксирующих соединительных элементов из второго положения в первое. Перемещение фиксирующих соединительных элементов из первого положения во второе и наоборот может, в частности, быть осуществлено с помощью приводящего элемента, как было описано выше в отношении крепления согласно настоящему изобретению. Поскольку сенсорный блок будет устанавливаться или сниматься на/с крепления вдоль нормали к образованной в креплении плоскости, обеспечена возможность избежать повреждения хрупких элементов, таких как малоразмерные электрические контактные выводы или подобных, из-за сдвига при установке. Таким образом, становится возможным использование выводов в сенсорном блоке и/или в опоре крепления.
Кроме того, в соответствии с другим аспектом настоящего изобретения предлагается крепление для сенсорного блока сканирующего зонда, которое включает:
опору,
по меньшей мере один подвижных фиксирующий соединительный элемент, расположенный на опоре и выполненный с возможностью взаимодействия с соответствующим элементом сенсорного блока сканирующего зонда, фиксирующий соединительный элемент, который может быть перемещен в первое положение, в котором он прикладывает усилие к установленному сенсорному блоку, перемещающее его к опоре, и во второе положение, в котором он позволяет производить установку сенсорного блока сканирующего зонда на опору или снятие этого сенсорного блока с опоры,
приводящий элемент, который подвижен относительно опоры и воздействует на по меньшей мере один фиксирующий соединительный элемент так, чтобы переместить его из первого положения во второе и наоборот посредством его смещения относительно опоры, и
приводящий двигатель, соединенный с опорой с возможностью сообщать относительное движение между приводящим элементом и опорой.
Такое крепление также может включать располагающий двигатель, выполненный с возможностью расположения опоры относительно исследуемого образца, и положение упора, которое определяет максимальное расстояние от опоры до образца. В таком креплении по меньшей мере один подвижный фиксирующий соединительный элемент расположен на опоре и приводящий двигатель является располагающим двигателем. Приводящий элемент выполнен с возможностью воздействия на по меньшей мере один фиксирующий соединительный элемент, чтобы переместить его во второе положение, когда опора достигает положения упора.
Кроме того, предложен еще один способ установки и снятия сенсорного блока сканирующего зонда, когда крепление содержит опору, фиксирующие соединительные элементы для взаимодействия с соответствующим элементом сенсорного блока сканирующего зонда, приводящий элемент, подвижный относительно опоры и воздействующий на фиксирующие соединительные элементы, и располагающий двигатель для расположения опоры по отношению к исследуемому образцу. Указанный способ содержит следующие шаги, согласно которым:
- перемещают фиксирующие соединительные элементы из первого положения, в котором они прикладывают усилие к установленному сенсорному блоку, перемещающее его к опоре, и во второе положение, в котором они позволяют производить установку сенсорного блока сканирующего зонда на опору или снятие этого сенсорного блока с опоры,
- устанавливают или снимают сенсорный блок сканирующего зонда;
- перемещают фиксирующие соединительные элементы из второго положения в первое,
причем перемещение фиксирующих соединительных элементов из первого положения во второе производится путем воздействия на фиксирующие соединительные элементы посредством движения указанного приводящего элемента относительно опоры, а движение указанного приводящего элемента к заданному положению упора осуществляется с помощью указанного располагающего двигателя.
Дальнейшие особенности, свойства и преимущества настоящего изобретения будут очевидны из нижеследующего описания вариантов реализации в сочетании с прилагаемыми чертежами.
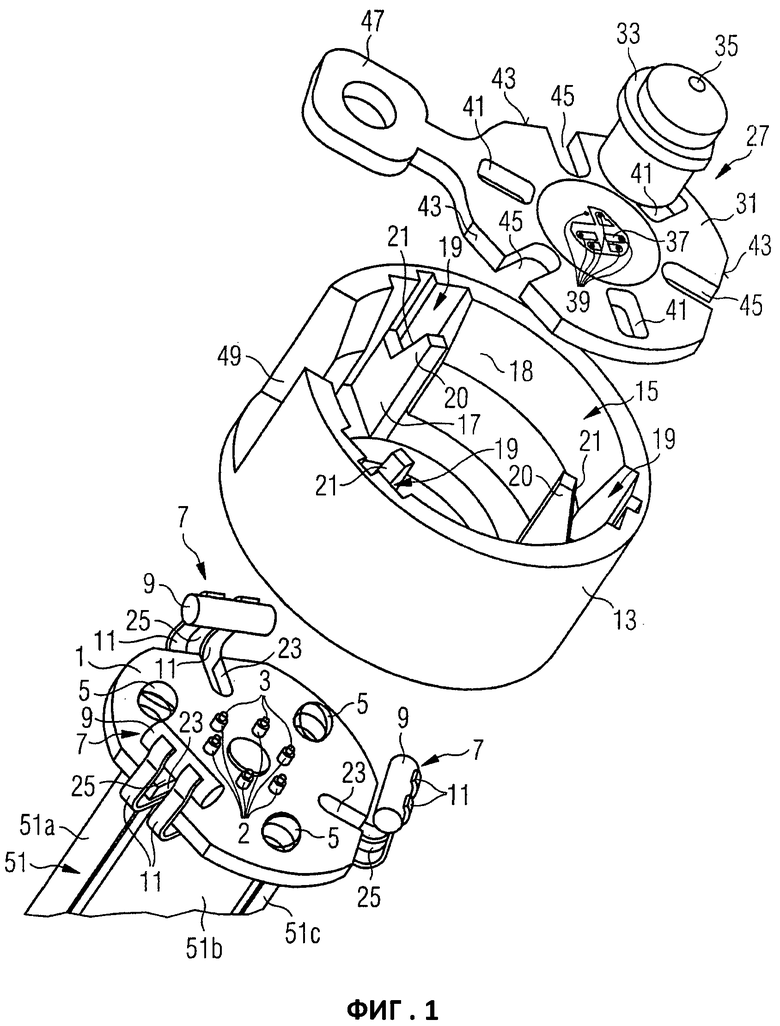
Фигура 1 показывает первый вариант реализации крепления и сенсорного блока сканирующего зонда согласно настоящему изобретению в разобранном виде.
Фигура 2 показывает вид в перспективе крепления и сенсорного блока с Фигуры 1 перед установкой сенсорного блока на крепление.
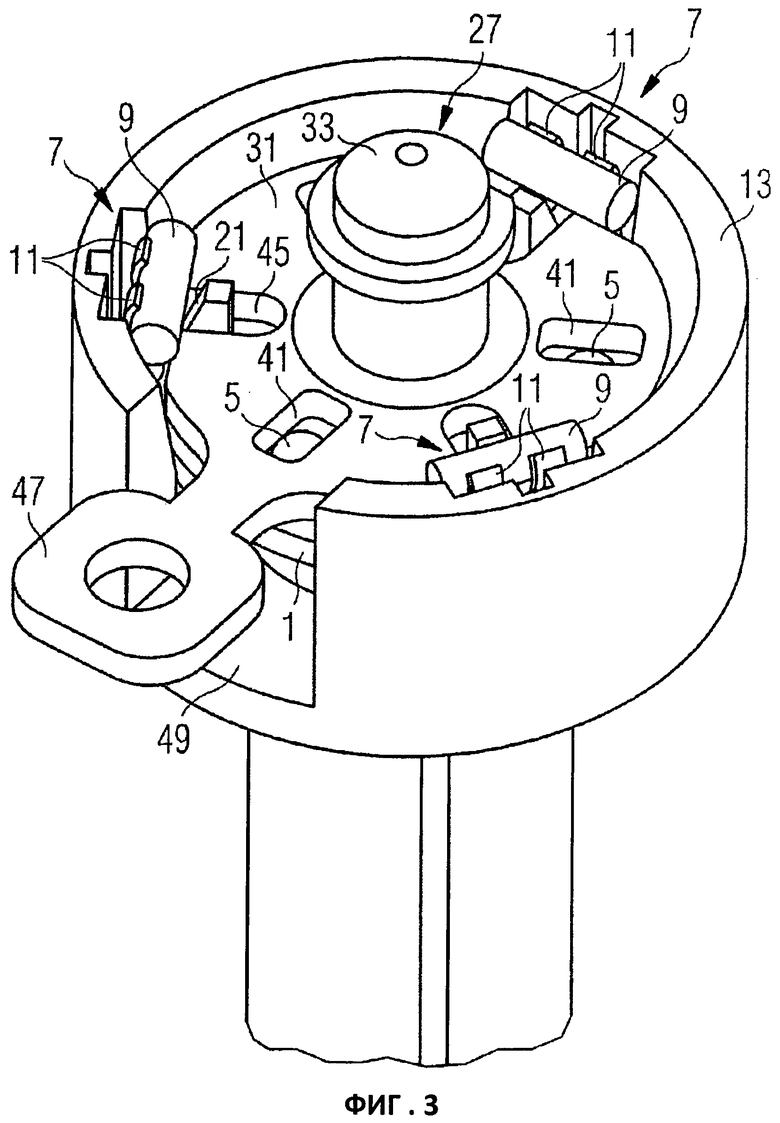
Фигура 3 показывает вид в перспективе крепления и сенсорного блока с Фигуры 1, когда сенсорный блок установлен на крепление.
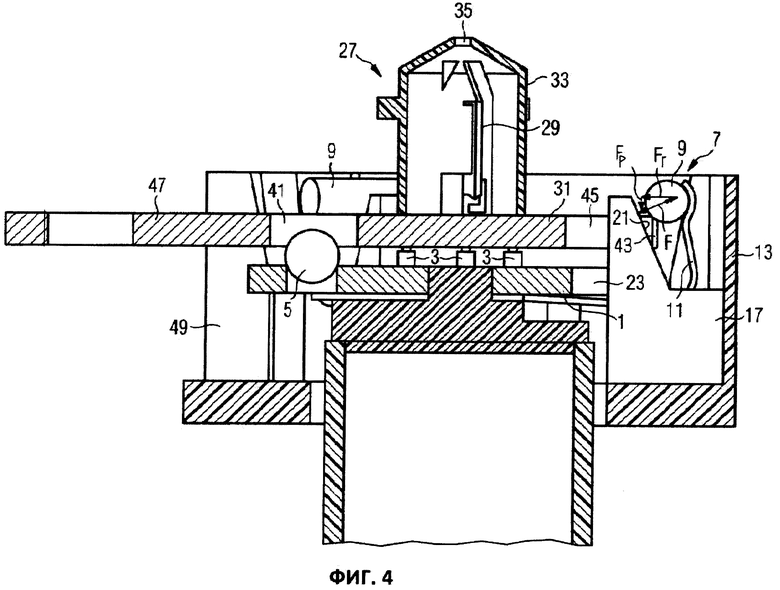
Фигура 4 показывает вид в разрезе крепления и сенсорного блока с Фигуры 1, когда сенсорный блок установлен на крепление.
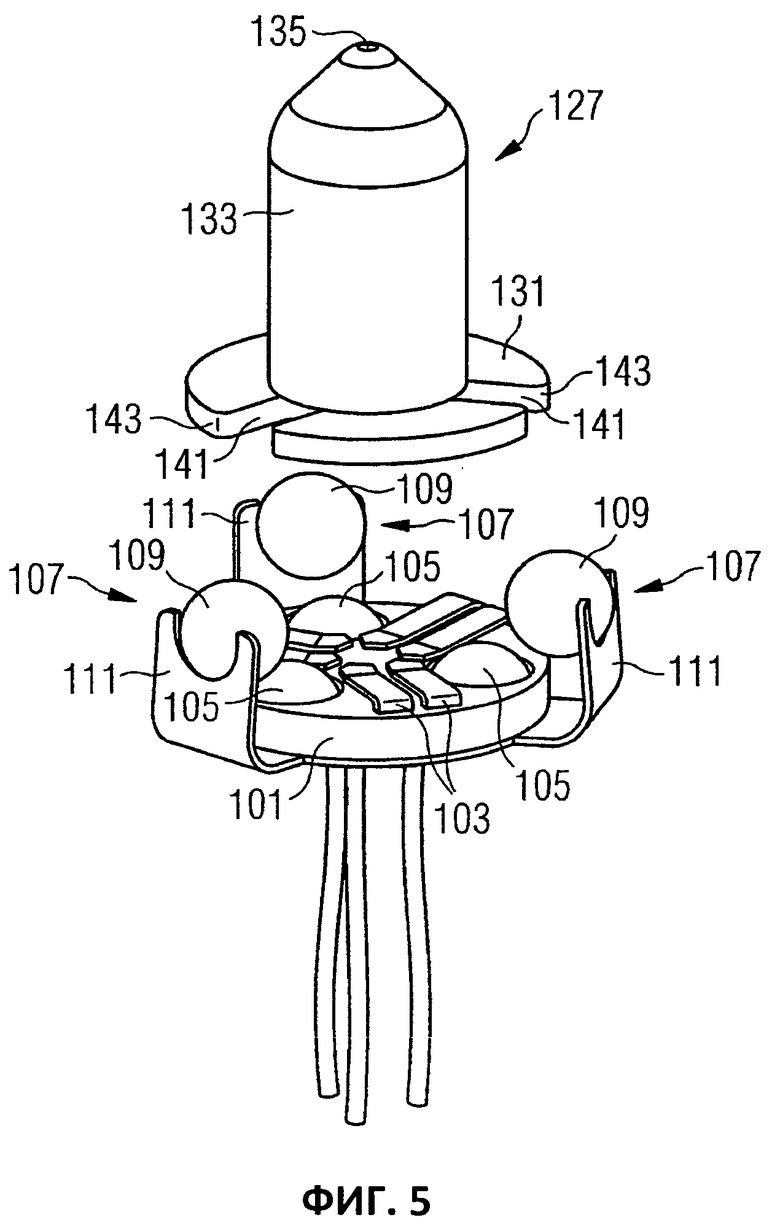
Фигура 5 показывает вид в перспективе второго варианта реализации крепления и сенсорного блока сканирующего зонда согласно настоящему изобретению перед установкой сенсорного блока на крепление.
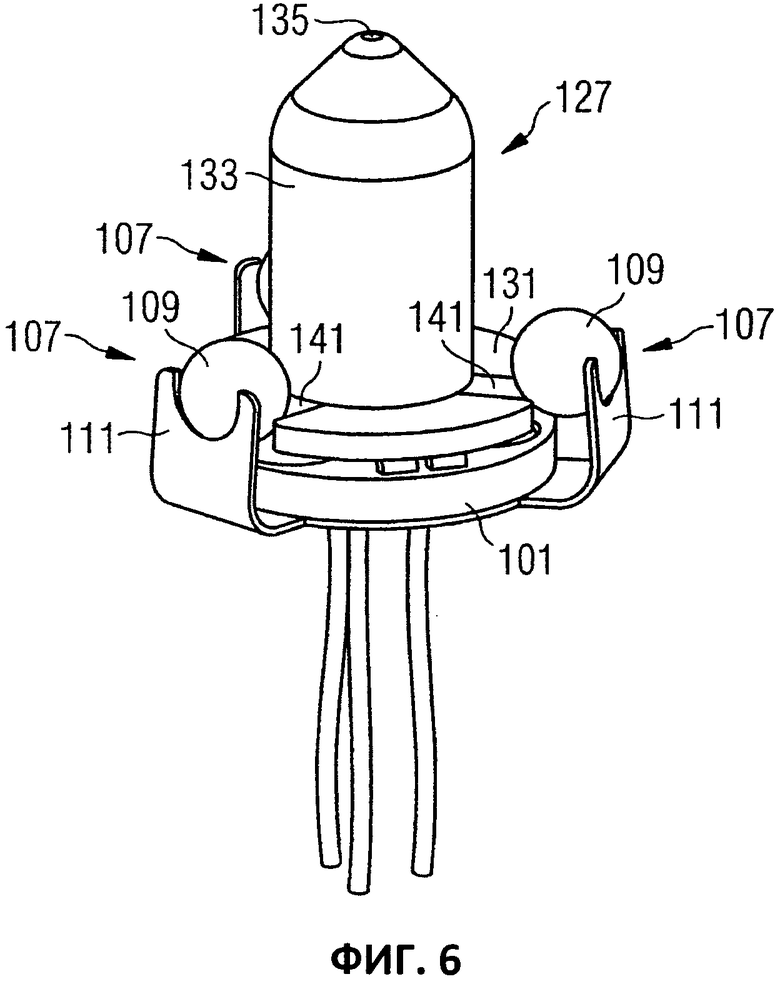
Фигура 6 показывает вид в перспективе второго варианта реализации, когда сенсорный блок установлен на крепление.
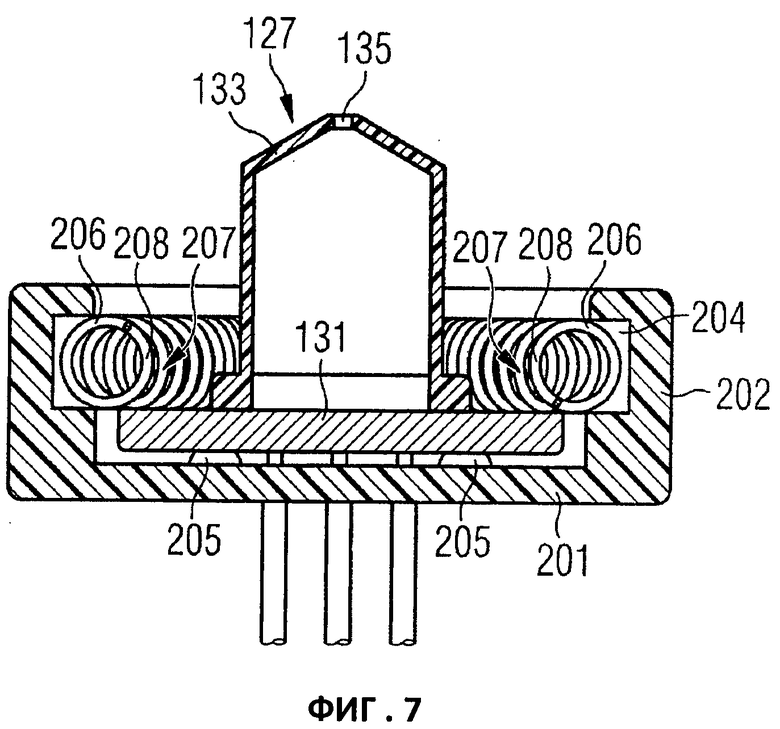
Фигура 7 показывает вид в разрезе третьего варианта реализации крепления и сенсорного блока согласно настоящему изобретению, когда сенсорный блок установлен на крепление.
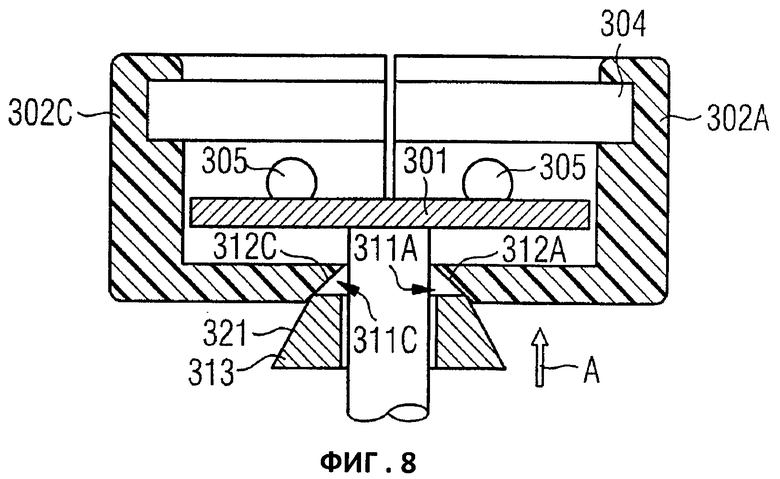
Фигура 8 показывает вид в разрезе крепления в соответствии с четвертым вариантом реализации изобретения.
Фигура 9 показывает вид сверху крепления с Фигуры 8, когда фиксирующие соединительные элементы находятся в первом положении.
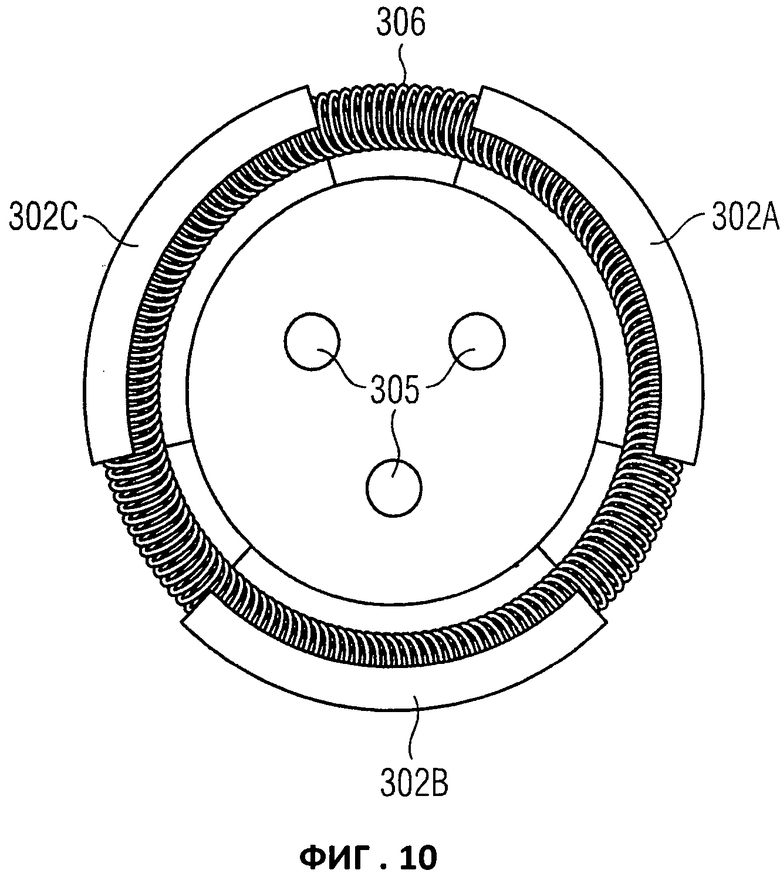
Фигура 10 показывает вид сверху крепления с Фигуры 8, когда фиксирующие соединительные элементы находятся во втором положении.
Первый вариант реализации крепления и сенсорного блока сканирующего зонда согласно настоящему изобретению будет описан со ссылками на Фигуры 1-4. На Фигуре 1 показаны составляющие крепления и сенсорного блока в развернутом виде в перспективе. На Фигурах 2 и 3 показаны крепление и сенсорный блок в установленном и неустановленном виде соответственно. На Фигуре 4 показан вид в разрезе крепления и сенсорного блока в установленном виде.
Крепление согласно настоящему изобретению включает опорную пластину 1, в которой расположены выводы 2 электрических контактов, которые проходят в направлении, перпендикулярном поверхности опорной пластины. Кроме того, в опорную пластину 1 встроены три шарика 5, которые могут, например, включать сапфировые шарики, так, что они находятся в вершинах воображаемого равностороннего треугольника. Три шарика 5 образуют в креплении плоскость, относительно которой будет располагаться сенсорный блок сканирующего зонда при установке в крепление. Три шарика 5 образуют первую часть так называемого подвижного крепления. Расстояния, на которые шарики 5 и выводы 2 выступают над опорной пластиной, подобраны так, что при установке сенсорного блока меньшие части выводов 2 входят в контактные отверстия на сенсорном блоке.
Три фиксирующих соединительных элемента 7 равномерно распределены по краю опорной пластины 1. Каждый фиксирующий соединительный элемент образован цилиндром 9, который поддерживают свободные концы двух упругосгибающихся металлических полосок, образующих ножки 11, так что ось симметрии цилиндра 9 расположена перпендикулярно нормали к плоскости, образованной тремя шариками 5. Предпочтительно, чтобы цилиндры 9 имели возможность вращения и осями вращения служили оси симметрии цилиндров 9. Другие концы металлических полосок прикреплены к опорной пластине 1 или по меньшей мере закреплены так, чтобы быть неподвижными относительно опорной пластины 1. Каждая пара ножек 11 образует упругосгибаемый рычаг, на свободном конце которого в настоящем варианте реализации изобретения расположены фиксирующие соединительные элементы, т.е. цилиндры 9. Ножки 11 согнуты таким образом, что их свободные концы отклонены к центру опорной пластины 1 и могут упруго отгибаться от центра против упругой силы, которую обеспечивает упругий материал металлических полосок.
Опорная пластина 1 крепления согласно настоящему изобретению и фиксирующие соединительные элементы 7 вместе образуют приемную часть для установки сенсорного блока сканирующего зонда вдоль нормали к плоскости, образованной в креплении тремя шариками 5.
Кроме того, крепление включает кольцо 13 с установочным отверстием, через которое может быть вставлен сенсорный блок сканирующего зонда. От внутренней поверхности 18 кольца 13 в радиальном направлении проходят три выступа 17. Эти выступы 17 равномерно распределены по периферии кольца 13 в соответствии с распределением фиксирующих соединительных элементов 7 вокруг края опорной пластины 1. Кроме того, выступы 17 имеют выемки 19, которые проходят со стороны установочного отверстия так, что внутренняя в радиальном направлении часть выступов 17 образует зубец 20 с обращенной наружу в радиальном направлении наклонной поверхностью 21. Как будет описано далее, наклонные поверхности 21 зубцов 20 образуют направляющие элементы для цилиндров 9 фиксирующих соединительных элементов.
Кольцо 13 окружает основание 1 крепления и установлено с возможностью скольжения вдоль осевого направления, которое соответствует нормали к плоскости, образованной шариками 5. Пазы 23 в основании 1 проходят внутрь в радиальном направлении от края основания в местах, где расположены фиксирующие элементы 17, и служат для приема выступов 17. Кроме того, между каждыми двумя ножками 11, образующими упругосгибаемый рычажный элемент фиксирующего соединительного элемента 7, имеется зазор. Указанные зазоры 25 расположены относительно пазов 23 таким образом, что выступы 17 могут зайти в пазы 23 через зазоры 25.
Кольцо 13, установленное с возможностью скользящего перемещения, может быть перемещено в первое положение, в котором направляющие поверхности 21 не находятся во взаимодействии с цилиндрами 9 фиксирующих соединительных элементов 7, и во второе положение, в котором направляющие поверхности 21 находятся во взаимодействии с цилиндрами 9. В случае контакта фиксирующие соединительные элементы 7 будут раздвинуты наружу в радиальном направлении против упругой силы, которую обеспечивают ножки 11, при этом расстояние, на которое они будут раздвинуты, зависит от осевого сдвига кольца 13. Таким образом, кольцо 13 образует приводящий элемент, который через наклонные поверхности 21 оказывает воздействие на фиксирующие соединительные элементы 7 так, чтобы позволить им переместиться из первого положения, в котором они не раздвинуты, во второе положение, в котором они раздвинуты с помощью наклонных поверхностей 21 на расстояние, определенное осевым положением кольца 13. Канавки 24, образованные внутри кольца 13, позволяют устанавливать цилиндры 9 и часть ножек 11 в разведенное положение фиксирующих соединительных элементов 7.
Также на Фигуре 1 показан сенсорный блок 27 сканирующего зонда, который соответствует вышеописанному креплению. Сенсорный блок 27 включает сенсорный элемент 29 (который не показан на Фигуре 1), установленный на основании 31 сенсорного блока и окруженный защитной оболочкой 33. Сенсорный элемент 29 включает атомно-острый наконечник, который выступает из защитной оболочки 33 через отверстие 35 в ней и расположен напротив основания 31. Электрическая схема 27 сенсорного элемента 29 напечатана на основании и включает контактные элементы 39, которые при установке сенсорного блока 27 на крепление контактируют с выводами 3.
Для достижения определенного расположения основания 31 и, следовательно, сенсорного элемента 29 по отношению к креплению выполнены три продолговатых отверстия 41. Указанные отверстия 41 расположены в вершинах воображаемого равностороннего треугольника, который совпадает с воображаемым равносторонним треугольником, в вершинах которого на опорной пластине 1 установлены шарики 5. Три шарика 5 и продолговатые отверстия 41 вместе образуют подвижное крепление, положение сенсорного блока 27 в котором определяется шестью контактными точками между тремя шариками и боковыми поверхностями трех продолговатых отверстий 41 (каждое отверстие обеспечивает две контактных точки с шариком, вставленным в это отверстие). В частности, когда сенсорный блок 27 установлен на креплении, его основание 31 главным образом расположено параллельно плоскости, образованной тремя шариками 5. Но возможно умышленное или случайное образование небольших углов между положениями плоскости, образованной шариками 5, и плоскости, в которой лежит основание 31, например, из-за допусков элементов, составляющих подвижное основание.
Основание 31 сенсорного блока 27 имеет по существу круглую форму с тремя прямыми участками 43, равномерно распределенными по краю основания. Паз 45 проходит внутрь в радиальном направлении от центра каждого прямого участка 43 и имеет такие размеры, что выступы 17 кольца могут совпасть с основанием 31 так, чтобы можно было вставить сенсорный блок 27 в кольцо 13 для установки в крепление.
Для обеспечения возможности удержания сенсорного блока 27 без прикосновения к хрупким частям на основании 31 имеется ручка 47. Чтобы ручка 47 не препятствовала размещению сенсорного блока 27 в кольце 13, в указанном кольце 13 выполнена выемка 49, в которую заходит ручка 47 при установке сенсорных элементов 27 в крепление.
На Фигуре 2 показан сенсорный блок сканирующего зонда до установки на крепление. Кольцо 13 образует приводящий элемент, выполненный с возможностью переведения фиксирующих соединительных элементов 7 из первого положения, в котором они бы перекрывали основание, во второе, в котором они раздвинуты и позволяют установить основание 31 сенсорного блока 27 на крепление без необходимости контакта с фиксирующими соединительными элементами 7. Переместить фиксирующие соединительные элементы 7 из первого положения, изображенного на Фигуре 2, во второе положение, в котором они раздвинуты, можно путем сдвига подвижно установленного кольца 13 на Фигуре 2 вверх по направлению, указанному стрелкой А и совпадающему с нормалью к плоскости, образованной тремя шариками 5. Таким образом, для установки сенсорного блока 27 сканирующего зонда на крепление необходимо сдвинуть кольцо 13 вверх по направлению стрелки А, чтобы раздвинуть фиксирующий соединительный элемент 7 против упругой силы, создаваемой упругим материалом ножек 11. Когда цилиндры 9 держатся на ножках 11 с возможностью вращения, при движении цилиндров 9 по наклонным поверхностям 21 им приходится преодолевать только сопротивление качения, а не сопротивление трения.
Когда фиксирующие соединительные элементы 7 находятся в раздвинутом положении, сенсорный блок 27 можно опустить по направлению, указанному стрелкой В на Фигуре 2 до положения, когда шарики 5 войдут в контакт с краями продолговатых отверстий 41 в основании 31 сенсорного блока 27. При правильно определенном расположении подвижного основания, образованного шариками 5 в опорной пластине 1 и продолговатыми отверстиями 41 в основании 31, установленный сенсорный блок 27 приобретает положение, позволяющее осуществить контакт выводов 3 с контактными элементами 39 основания 31 (контактные элементы видны только на Фигуре 1).
Когда сенсорный блок 27 установлен на основании 1 крепления, кольцо 13 сдвигается обратно и цилиндры 9 фиксирующих соединительных элементов 7 под действием упругой силы ножек 11 переходят в первое положение. Расстояние, на которое отстоят цилиндры 9 от основания 1 в первом положении, выбирается с учетом толщины основания 31 сенсорного блока 27 таким, чтобы они прикладывали к основанию 31 усилие F, состоящее из параллельной Fp и радиальной Fr компонент по отношению к направлению установки сенсорного блока (см. Фигуру 4). Радиальные компоненты в сумме равны нулю из-за симметричности конструкции фиксирующего соединителя, а осевые компоненты в сумме дают результирующую силу, которая направляет основание 31 с сенсорным блоком 27 к опорной пластине 1 так, чтобы зафиксировать сенсорный блок 27 в креплении. Крепление с установленным на нем сенсорным блоком показано на Фигуре 3 в перспективе и на Фигуре 4 в разрезе.
Для снятия сенсорного блока 27 с крепления кольцо 13 снова будет сдвинуто по направлению А на Фигуре 2, чтобы привести цилиндры 9 фиксирующих соединительных элементов 7 во второе положение, при котором можно снять сенсорный блок 27 с крепления, избежав его контакта с фиксирующими соединительными элементами 7.
Сдвигать кольцо 13 можно вручную или с помощью приводящего элемента, сообщающего кольцу 13 скользящее перемещение, например посредством пьезоэлектрического двигателя, который позволяет осуществлять точное расположение кольца 13.
Несмотря на то, что в варианте реализации изобретения, описанном со ссылкой на Фигуры 1-4, кольцо 13 устанавливается подвижно, оно также может быть установлено неподвижно. Как правило, применяемые сканирующие зонды включают приводящую конструкцию 51 для расположения основания 1 с установленным сенсорным блоком 27 относительно исследуемого образца по осям x, y и z. Указанные приводящие элементы могут быть выполнены, например, в виде пьезоэлектрических двигателей 51а, 51b, 51с. Таким образом, относительное перемещение между кольцом 13 и опорной пластиной 1 может передаваться приводящей конструкцией 51 без необходимости использования специального приводящего элемента для этой цели. В частности, относительное перемещение между кольцом 13 и опорной пластиной 1 может передаваться приводящим элементом, отвечающим за перемещение опорной пластины в направлении z. Кольцо 13 может, например, быть зафиксировано в пространстве путем прикрепления его к какой-либо части сканирующего зонда, а не к опорной пластине 1 или закрепленным на ней частям.
Перемещение фиксирующих соединительных элементов 9 из первого положения во второе, при котором они раздвинуты и позволяют производить установку или снятие сенсорного блока 27, может в этом случае осуществляться перемещением опоры 1 относительно кольца 13 с помощью приводящего элемента, отвечающего за перемещение опорной пластины 1 в направлении z. Для предотвращения падения сенсорного блока с крепления в процессе расположения сенсора относительно исследуемого образца может быть использован упор, которым, например, будет максимальное расстояние от образца, которое может обеспечить приводящий элемент, ответственный за перемещение опорной пластины 1 в направлении z. Тогда кольцо 13 может быть расположено так, чтобы раздвижение фиксирующих соединительных элементов 9 происходило только по достижении опоры 1.
Второй вариант реализации крепления и сенсорного блока сканирующего зонда показан на Фигурах 5 и 6. На Фигуре 5 показан сенсорный блок, снятый с крепления, а на Фигуре 6 показан установленный сенсорный блок. Второй вариант реализации изобретения является модификацией первого варианта реализации. Таким образом, те детали, которые имеют аналоги в первом варианте реализации изобретения, имеют те же позиционные обозначения, только увеличенные на 100, и будут описаны заново только в случае их существенного отличия от аналогов в первом варианте реализации изобретения.
Основное различие между первым и вторым вариантами реализации изобретения заключается в том, что сенсорный блок 127 сканирующего зондового микроскопа сам по себе является приводящим элементом, выполненным с возможностью перемещения фиксирующих соединительных элементов 107 во второе положение, когда они раздвинуты. Поскольку во втором варианте реализации изобретения нет необходимости в направляющих поверхностях, таких как направляющая поверхность 21 выступа 17 в первом варианте реализации изобретения, для контакта с фиксирующим соединительным элементом, то во втором варианте реализации изобретения ножки могут быть выполнены из одной заготовки упругого материала 111.
Другое отличие от первого варианта реализации изобретения заключается в том, что вместо цилиндров в качестве фиксирующих соединительных элементов крепления используются шарики. Тем не менее, шарики и цилиндры взаимозаменяемы в обоих вариантах реализации изобретения. Как и цилиндры, шарики могут быть установлены с возможностью вращения так, чтобы оси вращения были перпендикулярны направлению, по которому совершается установка или снятие сенсорного блока 127 сканирующего зонда.
Еще одно различие заключается в способе обеспечения контакта с сенсором, который реализован через полосковые контактные элементы 103 крепления. Тем не менее, обычно в описанных вариантах реализации выводы и полосковые контакты взаимозаменяемы.
Еще одно различие заключается в диаметре основания 131, который уменьшен по сравнению с диаметром основания в первом варианте реализации изобретения. Как следствие, сенсорная часть подвижного крепления выполнена не в виде продолговатых отверстий, а в виде пазов 141, проходящих внутрь в радиальном направлении от края основания 131. Внешние в радиальном направлении части 143 пазов 141 функционируют так же, как фиксирующие соединительные части основания 131.
Преимущество второго варианта реализации изобретения, показанного на Фигурах 5 и 6, по сравнению с первым вариантом реализации изобретения, показанным на Фигурах 1-4, заключается в том, что в креплении не нужен такой приводящий элемент, как кольцо 13 в первом варианте реализации изобретения, поскольку раздвижение фиксирующих соединительных элементов 107 осуществляет сам сенсорный блок 127 сканирующего зонда. Следовательно, размеры крепления могут быть очень небольшими, что делает его подходящим для сканирующих зондовых микроскопов с пространственно ограниченным местом для крепления. Тем не менее, если сенсорный блок 127 хрупкий, то предпочтителен первый вариант реализации изобретения, где, в отличие от второго, сенсорный блок можно установить, избежав его контакта с фиксирующими соединительными элементами.
Возможны модификации первого и второго вариантов реализации изобретения. Например, вместо упругих сгибающихся ножек для обеспечения упругой силы, действующей на фиксирующие соединительные элементы в направлении центра опорной пластины, можно использовать прямые спиральные пружины, расположенные, например, между цилиндрами 9 и внутренней поверхностью кольца 13, которые действуют на цилиндры в направлении центра крепления.
Кроме того, количество фиксирующих соединительных элементов крепления и фиксирующих соединительных частей сенсорного блока не ограничено тремя. Тем не менее, использование трех фиксирующих соединительных элементов позволяет реализовать преимущество, заключающееся в обеспечении равномерно распределенной силы, действующей на основание сенсорного блока в направлении опорной пластины, с использованием только трех фиксирующих соединительных элементов. В случае использования только двух фиксирующих соединительных элементов, которые расположены на противоположных сторонах опорной пластины, невозможно полностью исключить сдвиг сенсорного блока. Тем не менее, если фиксирующие соединительные элементы охватывают большие дуговые сектора опорной пластины, то два или даже один фиксирующий соединительный элемент могут быть достаточными.
Третий вариант реализации крепления согласно настоящему изобретению будет описан в соответствии с Фигурой 7. В этом варианте реализации фиксирующий соединительный элемент образован кольцевой спиральной пружиной, которая может сжиматься под действием основания сенсорного блока сканирующего зонда при его установке или снятии с крепления.
Крепление в соответствии с третьим вариантом реализации изобретения включает более или менее цилиндрическую стенку 202, которая поднимается над основанием 101 и окружает его. Кольцевая канавка 204 проходит по внутренней поверхности цилиндрической стенки и служит посадочным местом для кольцевой спиральной пружины 206, внутренняя в радиальном направлении часть которой выступает в канавку 204. Внутренние в радиальном направлении части 208 витков кольцевой спиральной пружины 206 функционируют в настоящем варианте реализации изобретения как фиксирующие соединительные элементы 207.
Сенсорный блок сканирующего зонда согласно настоящему варианту реализации изобретения, показанный на Фигуре 7, аналогичен сенсорному блоку согласно второму варианту реализации изобретения, описанному в соответствии с Фигурами 5 и 6, и, таким образом, он имеет те же позиционные обозначения, что и сенсорный блок согласно второму варианту реализации изобретения, и не будет описан далее во избежание повторений.
При установке или снятии сенсорного блока 127 с крепления, выполненного согласно третьему варианту реализации изобретения, его основание надавливает на крайние части 208 витков пружины так, чтобы сжать их в радиальном направлении. После того как основание 131 проходит через спиральную пружину 206, витки фиксируются обратно в исходное положение. Толщина основания 131 выбирается с учетом размеров шариков 205 и пазов 141 в основании 131 сенсорного блока 127 такой, чтобы витки спиральной пружины 206 фиксировали сенсорный блок 127 в его положении, действуя на него в направлении шариков 205 путем приложения к основанию 131 упругой силы, имеющей компоненту, параллельную нормали к поверхности, образованной шариками 205.
Возможны модификации варианта реализации изобретения, показанного на Фигуре 7. Например, верхняя и/или нижняя часть края основания может быть наклонной, чтобы оптимизировать передачу сил между спиральной пружиной 206 и основанием 131. Следует отметить, что наклонный край также полезен и во всех других вариантах реализации изобретения для оптимизации передачи сил. Кроме того, как и в других вариантах реализации, основание 131 или крышка 133 могут быть оснащены ручкой.
Кроме того, возможно наличие приводящего элемента для раздвижения кольцевой спиральной пружины при установке и снятии сенсорного блока 127. Пример такого приводящего элемента показан Фигурах 8-10 в качестве четвертого варианта реализации крепления. Для простоты на этих Фигурах не показан сенсорный блок сканирующего зонда, который не отличается от сенсорного блока согласно третьему варианту реализации изобретения. Кроме того, на Фигуре 8 не показана спиральная пружина. На Фигуре 8 показан вид крепления в разрезе, а на Фигурах 9 и 10 показан вид крепления сверху.
В отличие от крепления согласно третьему варианту реализации изобретения крепление согласно четвертому варианту реализации изобретения включает кольцо 302, которое состоит из трех кольцевых секторов 302А, 302В и 302С, которые подвижно устанавливаются на опорную пластину 301. Они могут двигаться в радиальном направлении из первого, внутреннего положения, показанного на Фигуре 9, во второе, внешнее, показанное на Фигуре 10. Спиральная пружина 306 (показанная только на Фигурах 9 и 10) действует на установленный сенсорный блок сканирующего зонда в направлении шариков 305, когда кольцевые сектора 302А, 302В, 302С находятся в первом положении; сенсорный блок может быть установлен или снят без контакта с кольцевой спиральной пружиной 306, когда кольцевые сектора 302А, 302В, 302С, к которым прикреплена внешняя в радиальном направлении часть кольцевой спиральной пружины, находятся во втором положении, при котором кольцевая спиральная пружина растянута. Кроме того, спиральная пружина 306 обеспечивает упругую силу, которая действует на кольцевые сектора 302А, 302В, 302С в направлении первого положения (показанного на Фигуре 9) и которую необходимо преодолеть для раздвижения кольцевых секторов и принятия ими второго положения (показанное на Фигуре 10).
Перемещение кольцевых секторов 302А, 302В, 302С в раздвинутое положение возможно осуществлять с помощью приводящего кольца 313 с конической внешней поверхностью 321. Кольцо 313 подвижно устанавливается на направляющий штырь 315, выходящий из опорной пластины 301 со стороны, противоположной установочной стороне. Фаски 311А, 311В, 311С кольцевых секторов 302А, 302В, 302С, окружающие направляющий штырь 315, образуют воронкообразное отверстие, через которое проходит направляющий штырь 315. Большинство секторов конической внешней поверхности 321 кольца 313 превосходят по диаметру воронкообразное отверстие, когда сектора 302А, 302В, 302С находятся в первом положении, показанном на Фигуре 8.
Когда приводящее кольцо 313 сдвигается по направлению стрелки А на Фигуре 8, коническая внешняя поверхность 321 кольца 313 вступает в контакт с воронкообразным секторами 312А, 312В, 312С поверхности кольцевых секторов 302А, 302В, 302С и выдавливают кольцевые сектора с направляющего штыря 315 против упругой силы кольцевой спиральной пружины 306, таким образом раздвигая кольцо.
Несмотря на то, что в четвертом варианте реализации изобретения кольцевые сектора 302А, 302В, 302С подвижно устанавливаются на опорную пластину 301, они также могут быть установлены таким образом, чтобы каждый кольцевой сектор 302 мог быть отклонен вокруг оси, расположенной на крае опорной пластины 301 или под опорной пластиной 301 и перпендикулярно нормали к плоскости, образованной шариками 305. Следует отметить, что в этом случае необходимо соответственно адаптировать приводящее кольцо для возможности сдвига кольцевых секторов.
Как и в первом варианте реализации изобретения, скользящее движение кольца 313 может быть сообщено ему приводящим элементом, например пьезоэлектрическим двигателем. Кроме того, вместо подвижного крепления кольца 313 оно может быть установлено в фиксированном положении, например, путем закрепления его на какой-либо части сканирующего зонда, отличной от опорной пластины 301 и закрепленных на ней частей. Как и относительное движение между кольцом 13 и опорной пластиной 1 в первом варианте реализации изобретения, относительное движение между, кольцом 313 и опорной пластиной 301 может осуществляться приводящей конструкцией для расположения крепления с установленным сенсором. Все указанное в этом смысле для первого варианта реализации изобретения справедливо также и для настоящего варианта реализации изобретения.
Настоящее изобретение, описанное в соответствии с Фигурами, изображающими конкретные варианты реализации изобретения, позволяет производить установку и снятие сенсорного блока сканирующего зонда вдоль нормали к плоскости, образованной опорой. В случае плоской опоры этой плоской поверхностью, в частности, может служить опора. Конструкция крепления и сенсорного блока сканирующего зонда согласно настоящему изобретению позволяет использование штырьков для обеспечения электрического контакта между опорой и сенсорным блоком без риска повреждения этих выводов вследствие бокового движения. Необходимо отметить, что возможно использование других вариантов реализации изобретения и внесение конструктивных изменений, входящих в объем настоящего изобретения.
Позиционные обозначения
1 опорная пластина
2 вывод
3 меньшая часть вывода
4 сенсорный блок сканирующего зонда
5 шарик
7 фиксирующий соединительный элемент
9 цилиндр
11 ножка
13 кольцо
15 установочное отверстие
17 выступ
18 внутренняя поверхность стенки
19 выемка
20 зубец
21 направляющая поверхность
23 паз
25 зазор
27 сенсорный блок
29 сенсорный элемент
31 основание
33 защитная оболочка
35 отверстие
37 электрическая проводка
39 отверстие
41 продолговатое отверстие
43 прямой участок
45 паз
47 ручка
49 выемка в кольце
51 приводящая конструкция
101 опорная пластина
103 контакт
105 шарик
107 фиксирующий соединительный элемент
109 шарик
111 ножка
127 сенсорный блок
133 защитная крышка
135 отверстие
141 паз
143 внешняя круговая деталь
201 опорная пластина
202 цилиндрическая стенка
204 кольцевая канавка
205 шарик
206 кольцевая спиральная пружина
207 фиксирующий соединительный элемент
208 внутренняя в радиальном направлении часть
301 опорная пластина
302 кольцо
304 канавка
305 шарик
306 кольцевая спиральная пружина
311 фаска
313 приводящее кольцо
315 направляющий штырь
321 коническая внешняя поверхность
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| ОПТИЧЕСКИЙ ЗОНД НА ОСНОВЕ КВАРЦЕВОГО РЕЗОНАТОРА ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2002 |
|
RU2221287C2 |
| Трехмерное сканирующее измерительное устройство для резьбы отверстий под шпильки главного разъёма на корпусе реактора | 2022 |
|
RU2794282C1 |
| МАЛОГАБАРИТНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2258901C1 |
| ЛАЗЕРНАЯ КОНФОКАЛЬНАЯ СЕНСОРНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2011 |
|
RU2604564C2 |
| КОМПЛЕКТ ЗОНДОВ ДЛЯ МИКРОСКОПА СО СКАНИРУЮЩИМ ЗОНДОМ | 2007 |
|
RU2459214C2 |
| НОСИТЕЛЬ ПРОВОДЯЩИХ ЗОНДОВ ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2001 |
|
RU2208845C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |

Изобретение относится к креплению для сенсорного блока сканирующего зонда. Крепление для сенсорного блока (27, 127) включает опору (1, 101, 201, 301), образующую в креплении плоскость, подвижные фиксирующие соединительные элементы (9, 109, 208), расположенные по краю опоры (1, 101, 201, 301) и выполненные с возможностью взаимодействия с соответствующей ответной частью (43, 143) сенсорного блока и возможностью перемещения в первое положение, в котором они прикладывают усилие к установленному сенсорному блоку (27, 127) таким образом, чтобы действовать на него в направлении опоры (1, 101, 201, 301) по нормали к указанной плоскости, и во второе положение, в котором они позволяют производить установку сенсорного блока (27, 127) на опору (1, 101, 201, 301) или снятие этого блока с опоры в направлении вдоль нормали к плоскости. Плоскость в креплении образована тремя шариками (5, 105, 205, 305). Каждый фиксирующий соединительный элемент (9, 109, 208) расположен на пружине (206, 306) или подвижном элементе (11, 111), выполненном с возможностью смещения к центру опоры (1, 101). Фиксирующие соединительные элементы (9, 109, 208) равномерно распределены по краю опоры (1, 101) так, что усилие, действующее на сенсорный блок (27, 127) в направлении опоры (1, 101, 201, 301) по нормали к плоскости, представляет собой суперпозицию радиальной и параллельной компонент по отношению к направлению установки, которые в сумме дают результирующую силу, действующую в направлении вдоль нормали. Технический результат - уменьшение риска повреждений сенсорного блока. 5 н. и 9 з.п. ф-лы, 10 ил.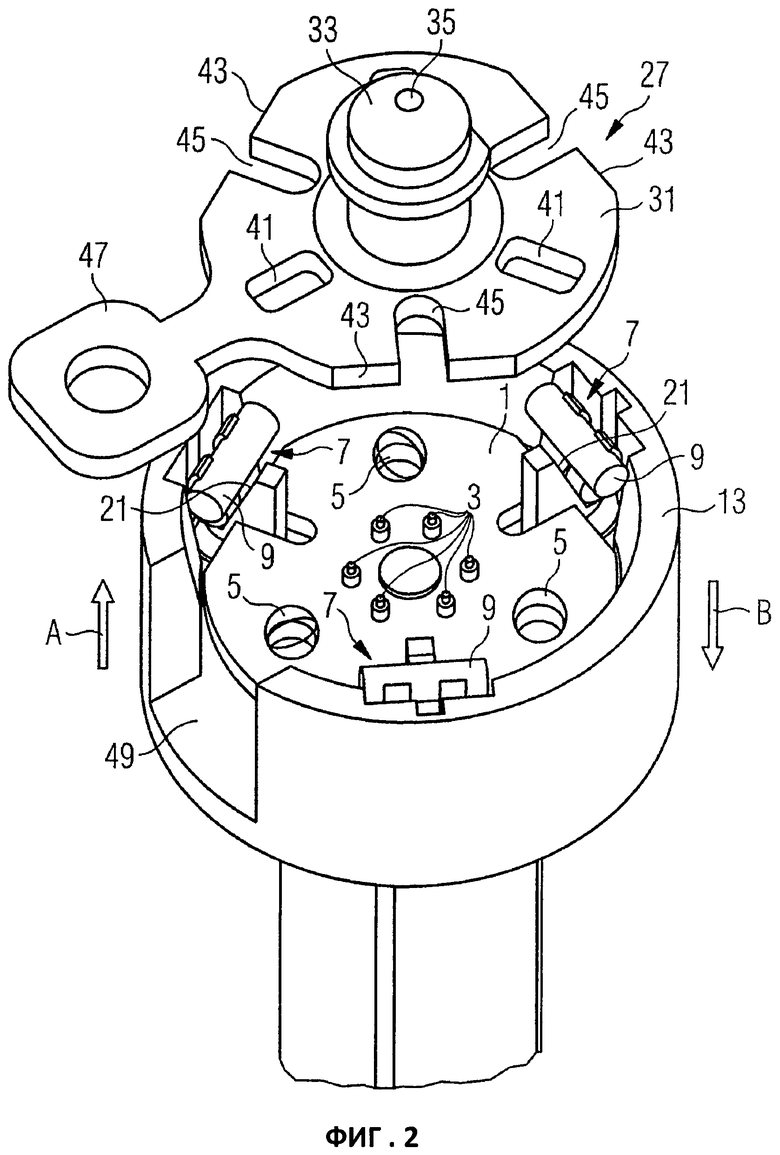
1. Крепление для сенсорного блока (27, 127) сканирующего зонда, включающее: опору (1, 101, 201, 301), образующую в креплении плоскость, подвижные фиксирующие соединительные элементы (9, 109, 208), расположенные по краю опоры (1, 101, 201, 301) и выполненные с возможностью взаимодействия с соответствующей ответной частью (43, 143) сенсорного блока (27, 127) сканирующего зонда и с возможностью перемещения в первое положение, в котором они прикладывают усилие к установленному сенсорному блоку (27, 127) сканирующего зонда таким образом, чтобы действовать на указанный сенсорный блок (27, 127) сканирующего зонда в направлении опоры (1, 101, 201, 301) по нормали к указанной плоскости, и во второе положение, в котором они позволяют производить установку сенсорного блока (27, 127) сканирующего зонда на опору (1, 101, 201, 301) или снятие этого блока с опоры в направлении вдоль нормали к указанной плоскости, в котором плоскость в креплении образована тремя шариками (5, 105, 205, 305), каждый фиксирующий соединительный элемент (9, 109, 208) расположен на пружине (206, 306) или подвижном элементе (11, 111), выполненном с возможностью смещения к центру опоры (1, 101) посредством упругой силы, а фиксирующие соединительные элементы (9, 109, 208) равномерно распределены по краю опоры (1, 101) с такой симметрией, что усилие, действующее на указанный сенсорный блок (27, 127) сканирующего зонда в направлении опоры (1, 101, 201, 301) по нормали к указанной плоскости, представляет собой суперпозицию радиальной и параллельной компонент по отношению к направлению установки, которые в сумме дают результирующую силу, действующую в направлении вдоль нормали.
2. Крепление по п. 1, в котором подвижный элемент включает упругосгибаемый рычажный элемент (11, 111), имеющий неподвижную часть, закрепленную по отношению к опоре (1, 101), и свободный конец, на котором расположен указанный фиксирующий соединительный элемент (9, 109), причем указанный упругосгибаемый рычажный элемент (11, 111) проходит по существу параллельно нормали к указанной плоскости и имеет такую форму, чтобы сдвигать свободный конец фиксирующим соединительным элементом (9, 109) к центру опоры (1, 101).
3. Крепление по п. 2, в котором неподвижная часть упругосгибаемого рычажного элемента (11, 111) закреплена на опоре (1, 101).
4. Крепление по п. 1, в котором фиксирующие соединительные элементы (9, 109) имеют симметрию вращения относительно оси симметрии и установлены с возможностью вращения относительно своей оси симметрии, которая является осью вращения и которая расположена перпендикулярно нормали к указанной плоскости, образованной в креплении.
5. Крепление по п. 1, которое включает по меньшей мере три подвижных фиксирующих соединительных элемента (9, 109), равномерно распределенных по краю опоры (1, 101).
6. Крепление по п. 1, которое включает по меньшей мере одну кольцевую спиральную пружину (206), которая расположена на периферии опоры (201, 301) с окружением этой опоры (201, 301), при этом части (208) витков (206), обращенные к центру опоры (201, 301), образуют указанные фиксирующие соединительные элементы.
7. Крепление по п. 1, которое также включает приводящий элемент (13, 313), выполненный с возможностью воздействия на указанные фиксирующие соединительные элементы (9, 208) с обеспечением перемещения указанных фиксирующих соединительных элементов (9, 208) из первого положения во второе положение и наоборот при приведении в действие указанного приводящего элемента (13, 313).
8. Крепление по любому из пп. 1-6, дополнительно содержащее:
приводящий элемент (13, 313), выполненный с возможностью перемещения относительно опоры (1, 101, 201, 301) и воздействия на указанные фиксирующие соединительные элементы (9, 109, 208) с его перемещением из первого положения во второе положение или, наоборот, посредством его перемещения относительно опоры (1, 101, 201, 301), приводящий двигатель, соединенный с опорой (1, 101, 201, 301) или приводящим элементом (13, 313) с обеспечением возможности передачи относительного перемещения между приводящим элементом (13, 313) и опорой (1, 101, 201, 301).
9. Крепление по п. 8, содержащее располагающий двигатель для расположения опоры (1, 101, 201, 301) относительно исследуемого образца;
положение упора, которое задает максимальное расстояние от опоры (1, 101, 201, 301) до образца, причем указанные подвижные фиксирующие соединительные элементы (9, 109, 208) расположены на опоре (1, 101, 201, 301), приводящий двигатель является располагающим двигателем, приводящий элемент (13, 313) выполнен с возможностью воздействия на указанные фиксирующие соединительные элементы (9, 109, 208) для его перемещения во второе положение, когда опора (1, 101, 201, 301) достигает положения упора.
10. Сенсорный блок (27, 127) сканирующего зонда, включающий сенсорный элемент (29) и основание (31, 131), к которому прикреплен сенсорный элемент (29) и которое включает по меньшей мере одну фиксирующую соединительную часть (43, 143), которая выполнена с возможностью взаимодействия с фиксирующими соединительными элементами (9, 109, 208) крепления по любому из пп. 1-9 и размеры которой выбраны такими, что она проходит через указанные фиксирующие соединительные элементы (9, 109, 208) вдоль нормали к указанной плоскости, образованной в креплении, когда эти фиксирующие соединительные элементы (9, 109, 208) находятся во втором положении, но не проходит через указанные фиксирующие соединительные элементы (9, 109, 208) вдоль указанной нормали, когда эти фиксирующие соединительные элементы (9, 109, 208) находятся в первом положении, в котором основание образовано опорной пластиной (31, 131), имеющей три удлиненных отверстия (41), расположенных в вершинах воображаемого равностороннего треугольника, или три паза (141), проходящих внутрь в радиальном направлении от края основания 131, и по меньшей мере одну часть края, которая образует указанную по меньшей мере одну фиксирующую соединительную часть (43, 143), при этом диаметр пластины и толщина края выбраны такими, что обеспечена возможность приложения усилия фиксирующими соединительными элементами (9, 109, 208) к указанной плоскости, образованной в креплении, в направлении нормали к креплению на опорную пластину (31, 131), после прохождения фиксирующей соединительной части (43, 143) через фиксирующие соединительные элементы к указанной плоскости.
11. Сенсорный блок (27) по п. 1, который также включает ручку (47), выступающую из основания (31).
12. Сканирующий зондовый микроскоп, включающий крепление по любому из пп. 1-9.
13. Способ установки сенсорного блока (27, 127) сканирующего зонда по п. 10 или 11 на крепление по п. 9, согласно которому: перемещают указанные фиксирующие соединительные элементы (9, 109, 208) из первого положения, в котором обеспечена возможность приложения ими усилия к установленному сенсорному блоку (27, 127) сканирующего зонда таким образом, чтобы действовать на указанный сенсорный блок (27, 127) сканирующего зонда в направлении опоры (1, 101, 201, 301), во второе положение, в котором они позволяют производить установку сенсорного блока (27, 127) на опору (1, 101, 201, 301), устанавливают сенсорный блок (27, 127) сканирующего зонда; перемещают фиксирующие соединительные элементы (9, 109, 208) из второго положения в первое положение, причем перемещение указанных фиксирующих соединительных элементов (9, 109, 208) из первого положения во второе положение осуществляют путем воздействия на указанные фиксирующие соединительные элементы (9, 109, 208) посредством перемещения приводящего элемента (13, 313) относительно опоры (1, 101, 201, 301), перемещение приводящего элемента (13, 313) относительно опоры (1, 101, 201, 301) осуществляют путем перемещения опоры (1, 101, 201, 301) к заданному положению упора с помощью располагающего двигателя.
14. Способ снятия сенсорного блока (27, 127) сканирующего зонда по п. 10 или 11 с крепления по п. 9, согласно которому: перемещают указанные фиксирующие соединительные элементы (9, 109, 208) из первого положения, в котором они прикладывают усилие к установленному сенсорному блоку (27, 127) сканирующего зонда таким образом, чтобы действовать на указанный сенсорный блок (27, 127) сканирующего зонда в направлении опоры (1, 101, 201, 301), во второе положение, в котором они позволяют производить снятие сенсорного блока (27, 127) с опоры (1, 101, 201, 301), снимают сенсорный блок (27, 127) сканирующего зонда; причем перемещение указанных фиксирующих соединительных элементов (9, 109, 208) из первого положения во второе положение осуществляют путем воздействия на указанные фиксирующие соединительные элементы (9, 109, 208) посредством перемещения приводящего элемента (13, 313) относительно опоры (1, 101, 201, 301), перемещение приводящего элемента (13, 313) относительно опоры (1, 101, 201, 301) осуществляют путем перемещения опоры (1, 101, 201, 301) к заданному положению упора с помощью располагающего двигателя.
| JP 10267948 A, 09.10.1998 | |||
| US 6078044 A, 20.06.2000 | |||
| WO 2004094938 A1, 04.11.2004 | |||
| US 2004250608 A1, 16.12.2004. |

