Устройство предназначено для проведения зондовых измерений на объектах, имеющих сложную форму, например на трубах в нефтяной и атомной отраслях промышленности.
Известен сканирующий зондовый микроскоп (СЗМ), включающий измерительную головку с пьезосканером и зондом, сопряженными с блоком анализа и управления, а также модуль сближения, содержащий три опорные стойки, одна из которых выполнена подвижной и соединена с приводом [1].
Недостаток этого устройства заключается в том, что его сложно использовать для исследования объектов сложных форм и размеров в широком их диапазоне.
Это устройство выбрано в качестве прототипа предложенного решения.
Технический результат изобретения заключается в расширении функциональных возможностей устройства.
Указанный технический результат достигается тем, что в сканирующий зондовый микроскоп для исследования крупногабаритных объектов, включающий измерительную головку с пьезосканером и зондом, сопряженными с блоком анализа и управления, а также модуль сближения, три опорные стойки, установленные на измерительной головке, и привод измерительной головки, включенный в модуль сближения, введена платформа, на которой установлен двухкоординатный стол, сопряженный с корпусом, установленным на нем с возможностью вращения, на котором установлен модуль сближения, в котором закреплена измерительная головка с пьезосканером и зондом, при этом измерительная головка содержит две пружинные опоры, а платформа снабжена модулем крепления к объекту.
Существует вариант, в котором корпус сопряжен с двухкоординатным столом посредством стойки, закрепленной на двухкоординатном столе, и двух цилиндрических направляющих.
Существует также вариант, в котором корпус сопряжен с возвратным механизмом, который выполнен в виде кронштейна с двумя пружинными упорами, расположенными с возможностью сопряжения с корпусом, при этом возвратный механизм закреплен на двухкоординатном столе.
Существует также вариант, в котором двухкоординатный стол выполнен в виде первой и второй кареток, сопряженных соответственно с первым и вторым приводами, а модуль сближения выполнен в виде третьей каретки, установленной подвижно относительно корпуса и сопряженной с приводом измерительной головки.
Существует также вариант, в котором двухкоординатный стол содержит датчики перемещения.
На фиг.1 изображена компоновочная схема предложенного устройства - вид сбоку.
На фиг.2 изображена компоновочная схема предложенного устройства - вид снизу.
Сканирующий зондовый микроскоп для исследования крупногабаритных объектов содержит платформу 1 (фиг.1, фиг.2) с упорами 2 и модулями крепления 3 для фиксации ее на объекте 4. В качестве упоров 2 могут использоваться металлические шарики, неподвижно закрепленные в платформе 1, или винты со сферическими шляпками, имеющими возможность изменения высоты выступания из платформы 1 с последующей фиксацией их клеем или гайками (не показано). В качестве модулей крепления 3 можно использовать: для магнитных объектов - электромагниты, для труб - скобы или ременные захваты, охватывающие трубы, для плоских, немагнитных и гладких объектов - вакуумные захваты. На платформе 1 установлен двухкоординатный стол 5, сопряженный с первым и вторым (второй не показан) приводами (первым и вторым шаговыми двигателями) 6 (см., например, [2]). Двухкоординатный стол 5 показан условно, он может содержать первую и вторую каретки, установленные друг на друге посредством направляющих, при этом каждая каретка сопряжена со своим шаговым двигателем 6 (не показаны). При использовании шагового двигателя вращения на его валу может быть закреплен винт, сопряженный с гайкой, установленной на каретке (не показано). В качестве направляющих можно использовать V-образные направляющие, описанные в [3]. Следует заметить, что стол 5 может быть выполнен в виде одной каретки (как показано на фиг.1), сопряженной с первым (X) и вторым (Y) шаговыми двигателями 6 (второй по координате Y не показан), закрепленными на платформе 1. При этом двигатели 6 могут содержать возвратные механизмы и системы кинематической развязки (не показаны). Возвратные механизмы и системы кинематической развязки см. в [4]. В этом случае в двухкоординатном столе 5 могут быть закреплены три твердых (сталь ШХ 15) шарика, находящиеся во взаимодействии с тремя поликоровыми вставками, установленными в платформе 1 (не показано). Двухкоординатный стол 5 (или его каретки) могут содержать датчики перемещения, состоящие из активных элементов 7 и пассивных координатных элементов 8. В качестве этих датчиков можно использовать изделия, описанные в [5]. На платформе 1 закреплена стойка 9, в которой посредством подшипников 10 и цилиндрических направляющих 11 установлен корпус 12 с возможностью вращения относительно стойки 9. Корпус 12 может быть сопряжен с возвратным механизмом 13, состоящим из кронштейна 14 и двух пружинных упоров 15 с пружинами 16, опирающимися на поверхность корпуса 12 с двух сторон симметрично от направляющей 11 (на фиг.1 второй упор 15 не показан). Механизм 13 может быть закреплен как на стойке 9 (фиг.1), так и на двухкоординатном столе 5 (не показано). Возвратный механизм 13 может также иметь другое исполнение. Вместо упоров 15 могут использоваться магниты, сопряженные одноименными полюсами с такими же магнитами, закрепленными на корпусе 12 (не показано). Это могут быть пружины, закрепленные на корпусе 12 и сопряженные со стойкой 9 (не показано) и т.п. На корпусе 12 расположена третья каретка 17, сопряженная с приводом измерительной головки (третьим шаговым двигателем) 18. Элементы 17 и 18 представляют собой модуль сближения. Каретка 17 может содержать также направляющие (не показаны), описанные в [3]. В корпусе 12 установлена измерительная головка 19 с пьезосканером 20 и зондом 21. В качестве такой головки может быть использовано устройство с системой автоматического слежения за кантилевером, описанное в [6]. Дополнительно головка 19 может содержать шаровые опоры (опорные стойки) 22, сопряженные с V-образными ориентаторами 23, закрепленными на каретке 17, а также пружинные опоры 24 с пружинами 25, установленные во втулках 26. Следует заметить, что пружины 25 должны быть примерно на порядок более жесткими, чем пружины 16. Пружины 16 необходимы только для сохранения положения корпуса 12 в отсутствие объекта 4 и не должны мешать работе пружин 25. Опоры 24 могут быть изготовлены из капролона, фторопласта, содержать шарики, установленные в них с возможностью вращения или фторопластовые вкладыши (не показаны) в металлических основах. Измерительная головка 19 может быть закреплена на каретке 17 посредством крепежных элементов 27. Это могут быть винты, скобы и т.п. (показаны условно). Измерительная головка 19 соединена с блоком анализа и управления 30. С блоком 30 могут также быть соединены шаговые двигатели 6 и 18, активные элементы 7 датчиков перемещения, а также захваты 3, в случае их выполнения в виде электромагнитов. Устройство также снабжено видеокамерой 31, позволяющей наблюдать за зоной измерения (показано условно), которая может быть подключена к блоку 30.
Устройство работает следующим образом. Закрепляют платформу 1, используя упоры 2 и модули крепления 3, например, на трубе (объекте) 4 с характерным диаметром в нефтяной и атомной отраслях промышленности от 150 мм. Посредством каретки 17 и привода 18 производят сближение зонда 21 и объекта 4 по координате Z. На первом этапе сближения пружинные опоры 24 вступают во взаимодействие с объектом 4 и ориентируют каретку 17 посредством цилиндрических направляющих 11 таким образом, что ось пьезосканера 20 0-0 сохраняет перпендикулярность цилиндрической поверхности объекта 4 (то есть является продолжением ее радиуса), даже если труба 4 имеет неидеальную форму и упоры 2 расположены на участке большего диаметра. При этом также осуществляется кинематическое замыкание головки 19 на объект 4, что увеличивает жесткость системы зонд 21 - объект 4. После достижения зондом 21 рабочего зазора производят сканирование поверхности объекта 4 в плоскости X,Y и его исследование. Подробно работу СЗМ см. в [7]. Далее, используя двухкоординатный стол 5, перемещают измерительную головку 19 на новое место измерения, где исследования продолжаются. Перемещение может проводиться при зазоре зонд 21 - объект 4 в 1-2 мм, при этом опоры 24 могут не терять контакта с поверхностью объекта 4, а скользить по нему.
Совокупность отличительных признаков, заключающаяся в том, что в устройство введена платформа, на которой установлен двухкоординатный стол, сопряженный с корпусом, установленным на нем с возможностью вращения, на котором установлен модуль сближения, в котором закреплена измерительная головка с пьезосканером и зондом, при этом измерительная головка содержит две пружинные опоры, а платформа - модули крепления к объекту - расширяют функциональные возможности устройства.
Введение в измерительную головку двух пружинных опор дополнительно повышает жесткость системы зонд - образец, что повышает точность измерения и соответственно расширяет возможный круг исследуемых объектов.
Сопряжение корпуса с двухкоординатным столом посредством стойки и двух цилиндрических направляющих обеспечивает работоспособность устройства на поверхностях сложной формы.
Введение возвратного механизма обеспечивает стабильное положение измерительной головки между установками ее на объект.
Выполнение двухкоординатного привода в виде первой и второй кареток позволяет при однотипных измерениях (вдоль трубы или поперек) использовать только один привод и одну каретку, что увеличивает ресурс работы устройства.
Выполнение модуля сближения в виде третьей каретки обеспечивает осевой подвод зонда к объекту, что улучшает работоспособность устройства на поверхностях сложной формы.
Датчики перемещения двухкоординатного стола обеспечивают состыковку изображений, полученных измерительной головкой, что расширяет функциональные возможности устройства.
ЛИТЕРАТУРА
1. Солвер - Смена, www.ntmdt.com.
2. AMD 1220-V12-09. Каталог Фимы «Faulhaber».
3. SVS 1050-13Z. Каталог фирмы «Nippon bearing Co.».
4. Патент RU2255321.22.06.2005.
5. RGH25F. Каталог фирмы «RENISHAW».
6. Патент RU2227333. 20.04.2004.
7. Зондовая микроскопия для биологии и медицины. В.А.Быков и др. Сенсорные системы, Т. 12, 1998. №1. с.99-121.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| МАЛОГАБАРИТНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2258901C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОНТРОЛИРУЕМОЙ СРЕДОЙ ИЗМЕРЕНИЯ | 2008 |
|
RU2401983C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ОПТИЧЕСКИМ МИКРОСКОПОМ | 2009 |
|
RU2488126C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЖИДКОСТНОЙ ЯЧЕЙКОЙ | 2001 |
|
RU2210818C2 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| УСТРОЙСТВО МЕХАНИЧЕСКОГО ПЕРЕМЕЩЕНИЯ ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2015 |
|
RU2629538C2 |

Устройство предназначено для проведения зондовых измерений на объектах, имеющих сложную форму, например на трубах в нефтяной и атомной отраслях промышленности. Сущность изобретения заключается в том, что в сканирующий зондовый микроскоп для исследования крупногабаритных объектов, включающий измерительную головку с пьезосканером и зондом, сопряженными с блоком анализа и управления, модуль сближения, три опорные стойки, установленные на измерительной головке, и привод измерительной головки, включенный в модуль сближения, дополнительно введена платформа, на которой установлен двухкоординатный стол, сопряженный с корпусом, установленным на нем с возможностью вращения, на котором установлен модуль сближения, в котором закреплена измерительная головка с пьезосканером и зондом. Измерительная головка содержит две пружинные опоры, а платформа - модули крепления к объекту. Технический результат - расширение функциональных возможностей устройства. 6 з. п. ф-лы, 2 ил.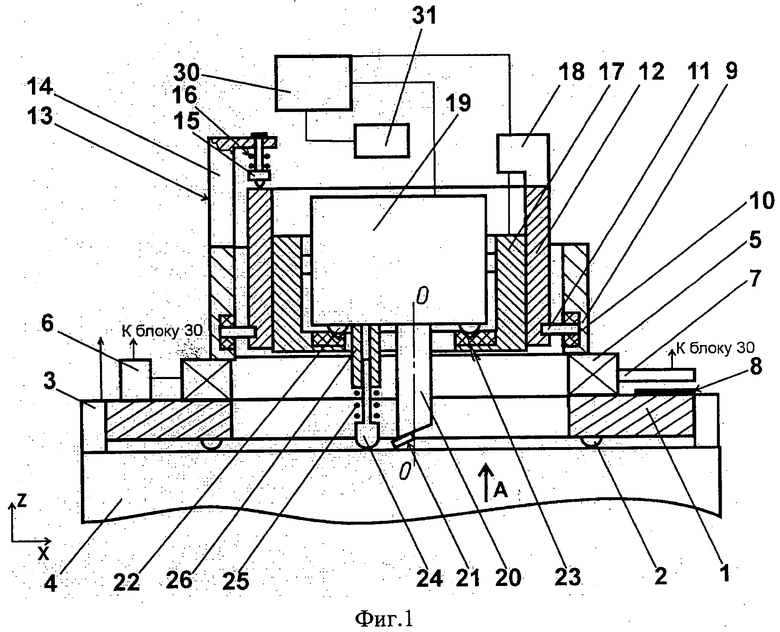
1. Сканирующий зондовый микроскоп для исследования крупногабаритных объектов, включающий измерительную головку с пьезосканером и зондом, сопряженными с блоком анализа и управления, а также модуль сближения, три опорные стойки, установленные на измерительной головке, и привод измерительной головки, включенный в модуль сближения, отличающийся тем, что в него введена платформа, на которой установлен двухкоординатный стол, сопряженный с корпусом, установленным на нем с возможностью вращения, на котором установлен модуль сближения, в котором закреплена измерительная головка с пьезосканером и зондом, при этом измерительная головка содержит две пружинные опоры, а платформа - модули крепления к объекту.
2. Устройство по п.1, отличающееся тем, что корпус сопряжен с двухкоординатным столом посредством стойки, закрепленной на двухкоординатном столе, и двух цилиндрических направляющих.
3. Устройство по п.1, отличающееся тем, что корпус сопряжен с возвратным механизмом, закрепленным на двухкоординатном столе.
4. Устройство по п.3, отличающееся тем, что возвратный механизм выполнен в виде кронштейна с двумя пружинными упорами, расположенными с возможностью сопряжения с корпусом.
5. Устройство по п.1, отличающееся тем, что двухкоординатный стол выполнен в виде первой и второй кареток, сопряженных соответственно с первым и вторым приводами.
6. Устройство по п.1, отличающееся тем, что модуль сближения выполнен в виде третьей каретки, установленной подвижно относительно корпуса и сопряженной с приводом измерительной головки.
7. Устройство по п.1, отличающееся тем, что двухкоординатный стол содержит датчики перемещения.
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| US 5945671 A, 31.08.1999 | |||

