Область техники
Данное изобретение относится к технологии ремонта при эксплуатации АЭС, конкретно касается трехмерного сканирующего измерительного устройства для измерения резьбы отверстий под шпильки главного разъема на корпусе реактора.
Уровень техники
После длительной эксплуатации из-за длительного воздействия высокой температуры и высокого давления в отверстиях под шпильки главного разъема на корпусе ядерного реактора могут появиться трещины, деформации и другие повреждения, что может существенно влиять на безопасную эксплуатацию реактора и привести к серьезным ядерным авариям.
Существующее устройство обнаружения дефектов отверстий под шпильки главного разъема в основном проводит качественную проверку отверстий под шпильки посредством визуального осмотра, его недостатки заключаются в том, что не позволяет получить количественные данные отверстий под шпильки, не позволяет осуществлять количественное отслеживание данных по деформации отверстий под шпильки и определение тенденции изменения этих данных.
Раскрытие изобретения
Целью настоящего изобретения является создание трехмерного сканирующего измерительного устройства для резьбы отверстий под шпильки главного разъема на корпусе реактора, которое может относительно точно выполнить сканирующее измерение отверстий под шпильки главного разъема на корпусе реактора.
Техническое решение данного изобретения описано ниже:
Трехмерное сканирующее измерительное устройство для резьбы отверстий под шпильки главного разъема на корпусе реактора включает в себя транспортную тележку, позиционирующий механизм, установленный на транспортной тележке, поворотный механизм и подъемный механизм для сканирования отверстий под шпильки; указанный позиционирующий механизм скользит относительно транспортной тележки; подъемный механизм для сканирования отверстий под шпильки расположен в середине транспортной тележке, указанный поворотный механизм для сканирования отверстий под шпильки соединен с подъемным механизмом для сканирования отверстий под шпильки и приводится в движение вверх-вниз подъемным механизмом для сканирования отверстий под шпильки;
Указанная транспортная тележка включает в себя дугообразную платформу, вспомогательные опорные колеса под платформой, блок направляющих роликов по обеим сторонам поясного отверстия на платформе и передаточную шестерню транспортной тележки на внутренней стороне дуги платформы; указанное поясное отверстие используется как отверстие для установки позиционирующего механизма, а с внешней стороны длинной стороны отверстия установлен блок направляющих роликов, который взаимодействует с позиционирующим механизмом для формирования скольжения; передаточная шестерня транспортной тележки сцепляется с позиционирующим механизмом через шестерни.
Указанных вспомогательных опорных колес имеется множество, соединительная линия осей вращения этих колес совмещаются с диаметром дуги платформы транспортной тележки.
В указанный позиционирующий механизм входят позиционирующий направляющий ползун, позиционирующий подъемный механизм и статор расширительного механизма, который расположен на позиционирующем направляющем ползуне, позиционирующая ведущая шестерня, расположенная на одной стороне позиционирующего направляющего ползуна, приводной вал расширительного механизма, соединенный с позиционирующим подъемным механизмом и расположенный под позиционирующим направляющим ползуном; позиционирующий подъемный механизм приводит в движение вверх и вниз приводной вал расширительного механизма под ним; указанный позиционирующий направляющий ползун и блок направляющих роликов взаимодействуют, приводной вал расширительного механизма расположен под платформой транспортной тележки, а позиционирующая ведущая шестерня входит в зацепление с передаточной шестерней транспортной тележки.
На нижнем конце указанного приводного вала расширительного механизма предусмотрен трехкулачковый патрон, который установлен с помощью кронштейна патрона, который жестко соединен с нижним концом приводного вала расширительного механизма.
По окружности боковой стенки указанного трехкулачкового патрона равномерно обработаны установочные отверстия, в которых имеются позиционирующие ножки, соединенные с трехкулачковым патроном.
На передней и задней сторонах транспортной тележки предусмотрены по одному комплекту позиционирующего механизма соответственно, позиционирующий механизм доходит до верха отверстия под шпильки под действием блока направляющих роликов и передаточной шестерни транспортной тележки, позиционирующий подъемный механизм опускается до положения стенки резьбового отверстия, приводной вал расширительного механизма приводит трехкулачковый патрон во вращение вместе с ним, а позиционирующие ножки вывинчиваются из трехкулачкового патрона, чтобы позиционирующие ножки соприкоснулись со стенкой резьбового отверстия и зафиксировать позиционирующий механизм.
Указанный поворотной механизм для сканирования отверстий под шпильки включает в себя приводной вал сканирования, предусмотренный в соответствующем установочном отверстии на транспортной тележке, рабочий сканирующий блок, расположенный на нижнем конце приводного вала сканирования, и установочный кронштейн механизма сканирования на верхнем конце приводного вала сканирования, установочный кронштейн механизма сканирования приводится в движение вверх и вниз подъемным механизмом для сканирования отверстий под шпильки; приводной вал сканирования приводится во вращение приводным двигателем сканирования, который установлен на установочном кронштейне механизма сканирования.
В указанный рабочий сканирующий блок входят лазерное отражательное зеркало, видеокамера и лазерный сканер, расположенные на нижнем конце приводного вала для сканирования, эти три элемента установлены на одной и той же плоскости; лазерный сканер установлен неподвижно относительно приводного вала сканирования, и его положение и угол нерегулируемы; лазерное отражательное зеркало расположено сбоку от лазерного сканера, а регулирование положения лазерного отражательного зеркала меняет угол отражения лазера.
На указанном установочном кронштейне сканирующего механизма предусмотрено устройство кодирования угла сканирования, который записывает в реальное время угол поворота приводного вала сканирования.
После опускания поворотного механизма для сканирования отверстий под шпильки до заданного положения подъемный механизм сканирования отверстий под шпильки приостанавливает выполнять функцию подъема, приводной двигатель сканирования приводит в вращение приводной вал сканирования и приводит в синхронное вращение лазерное зеркало, визуальную видеокамеру и лазерный сканер на нижнем конце приводного вала сканирования для выполнения сканирования отверстий под шпильки на 360°.
Указанный подъемный механизм сканирования отверстий под шпильки включает в себя выравнивающее основание, расположенное на транспортной тележке, подъемный модуль, расположенный сбоку от выравнивающего основания, и подъемный установочный кронштейн, который соединен и взаимодействует с подъемным модулем и может относительно друг друга подняться и опускаться; подъемный установочный кронштейн соединен с поворотным механизмом сканирования отверстий под шпильки и приводит его в движение вверх и вниз.
На верхней части указанного выравнивающего основания предусмотрено устройство кодирования высоты подъема.
Полезные технические результаты данного изобретения заключаются в следующем:
Разработка поворотного механизма сканирования отверстий под шпильки и подъемного механизма сканирования позволяет получать данные резьбы отверстий под шпильки главного разъема на корпусе реактора АЭС, а также дополнительная разработка телескопического механизма для позиционирования и расширения позволяет лучше адаптироваться к сканирующему измерению отверстий под шпильки главного разъема различных размеров на корпусе реактора.
Подъемный механизм сканирования отверстий под шпильки и поворотный механизм сканирования могут быстро и точно сканировать отверстия под шпильки, что способствует техническим специалистам в построении данных на трехмерной основе, что может эффективно сократить время измерения отверстий под шпильки, повысить точность измерения и эффективность работ при капитальном ремонте реактора;
Установлен приводной позиционирующий механизм, приводной двигатель приводнит позиционирующую ведущую шестерню в действие, приводной механизм при наведении блоком направляющих роликов и направляющей канавкой осуществляет перемещение оборудования вдоль поверхности главного разъема корпуса реактора и точного позиционирования.
Краткое описание чертежей
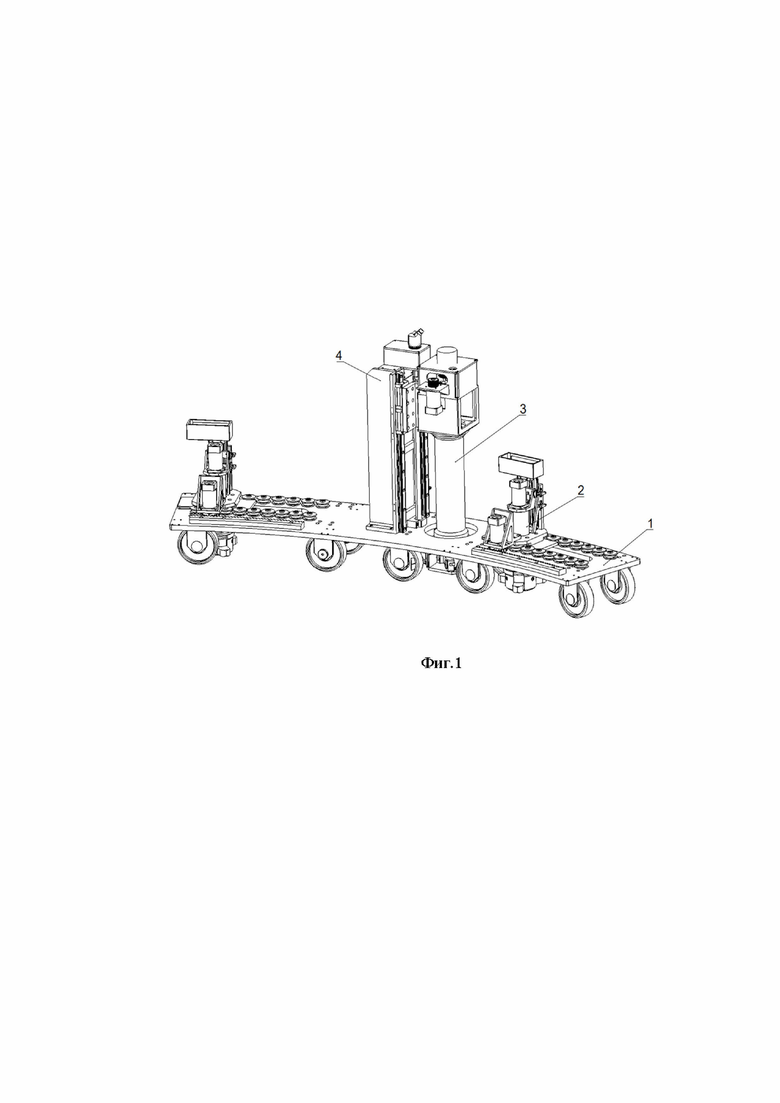
Фиг. 1 Схема трехмерного сканирующего измерительного устройства для резьбы отверстий под шпильки главного разъема на корпусе реактора;
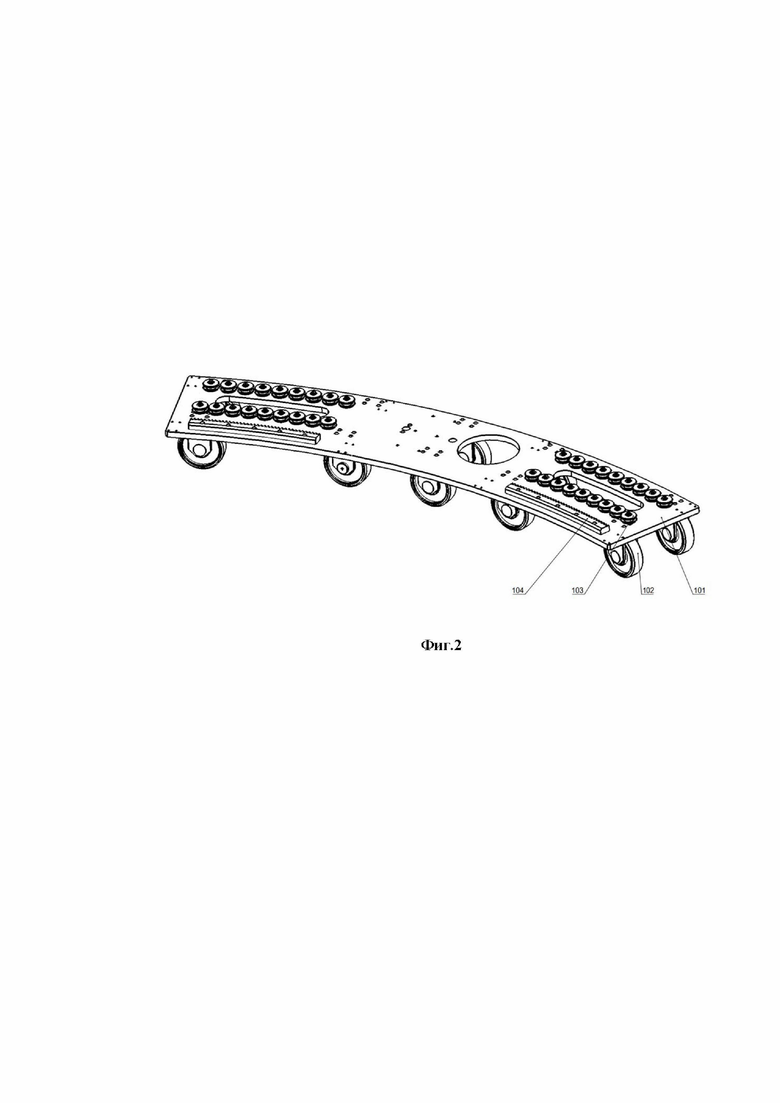
Фиг. 2 Схема конструкции транспортной тележки;
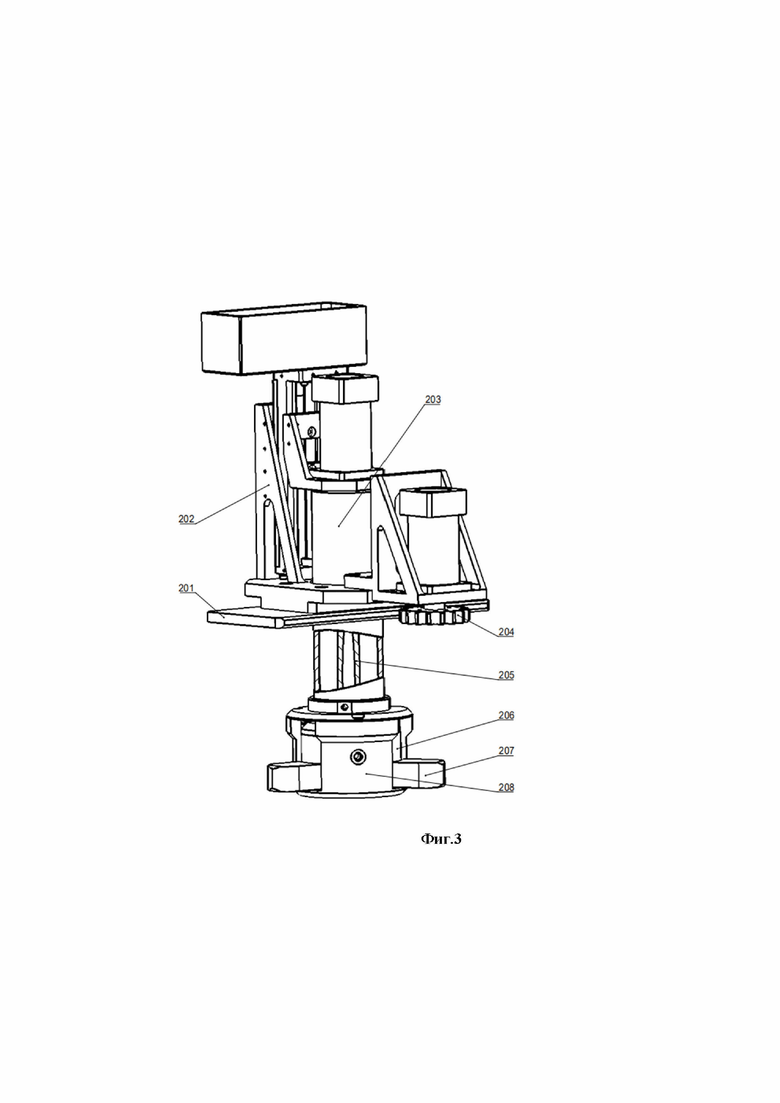
Фиг. 3 Конструктивная схема позиционирующего механизма;
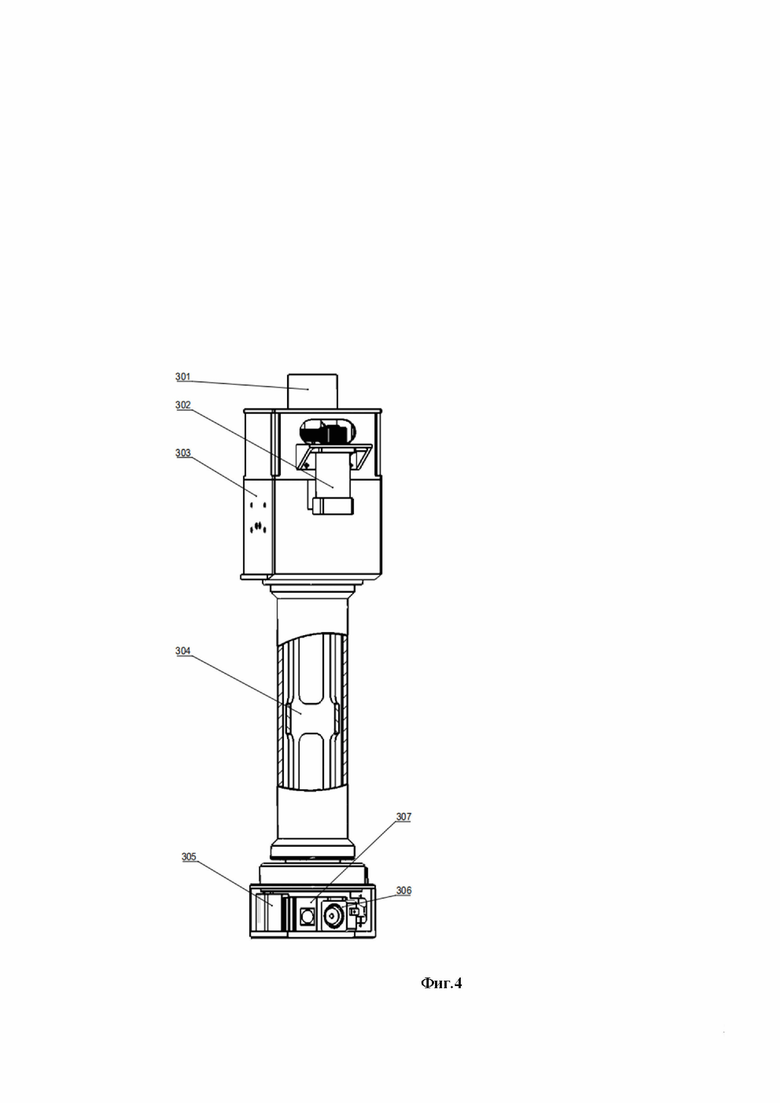
Фиг. 4 Конструктивная схема поворотного механизма сканирования отверстий под шпильки;
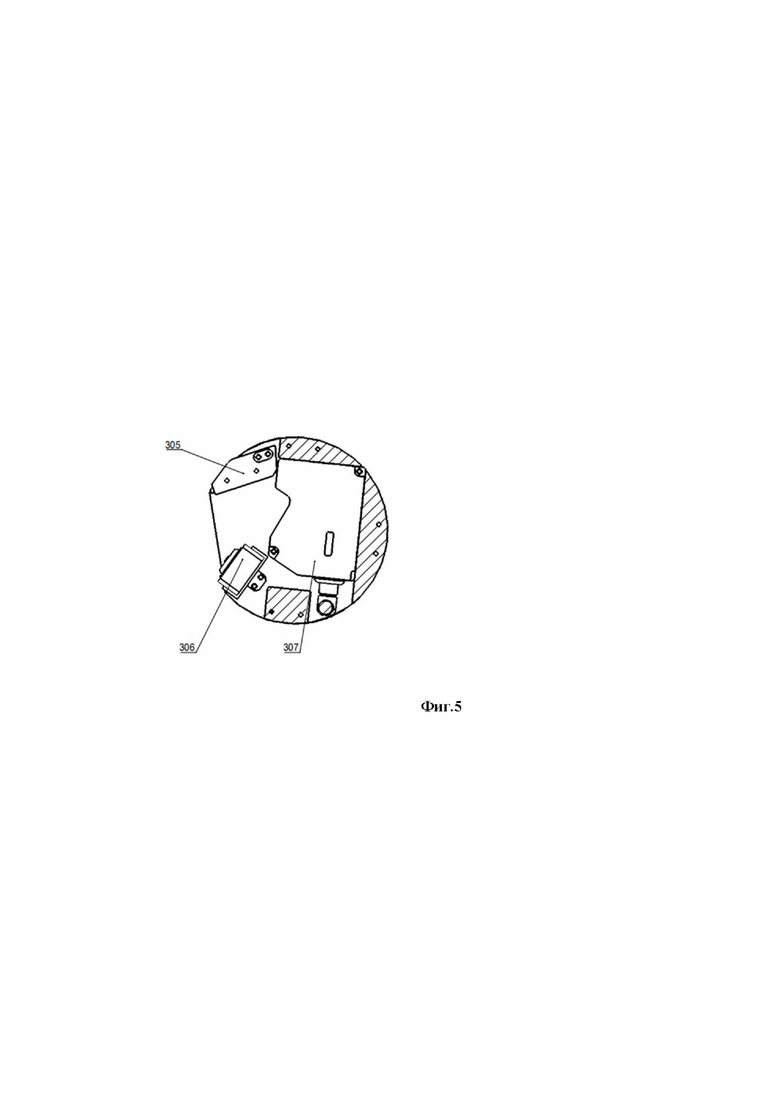
Фиг. 5 Схема размещения рабочего блока сканирования поворотного механизма сканирования отверстий под шпильки;
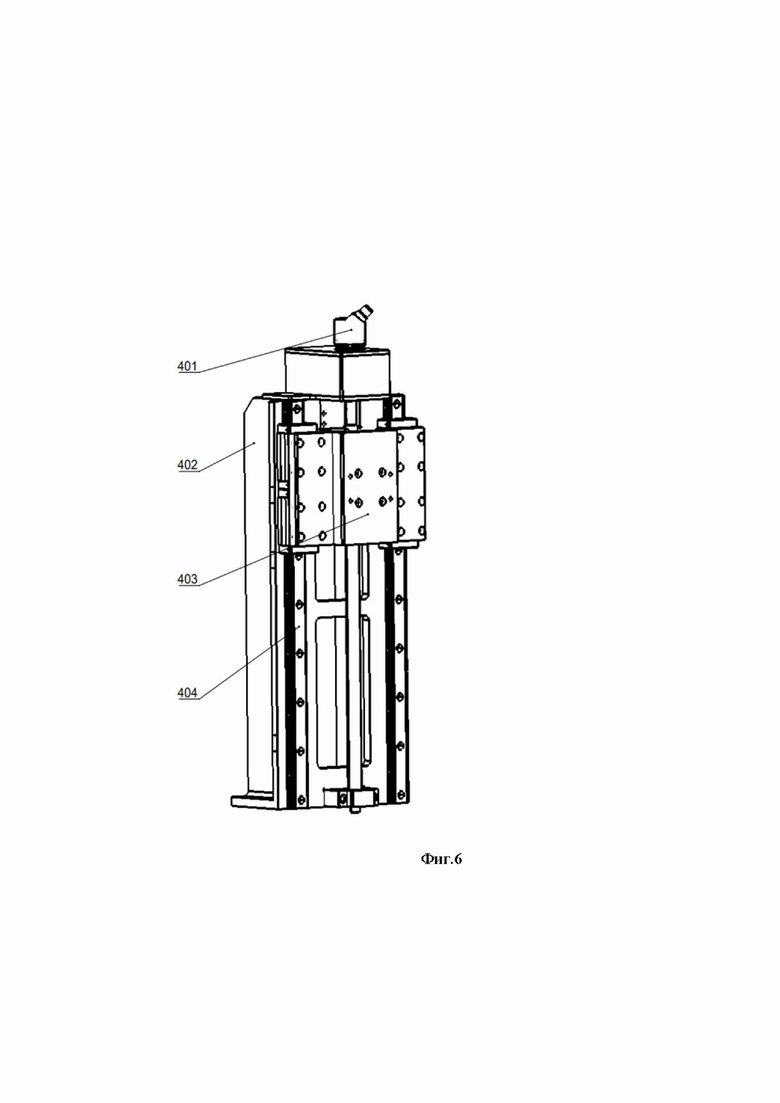
Фиг. 6 Конструктивная схема подъемного механизма сканирования отверстий под шпильки.
Перечень позиций, представленных на чертежах: 1- транспортная тележка; 2- позиционирующий механизм; 3- поворотный механизм для сканирования отверстий под шпильки: 4-подъемный механизм для сканирования отверстий под шпильки; 101 – платформа транспортной тележки; 102- вспомогательное опорное колесо; 103-блок направляющих роликов; 104- передаточная шестерня транспортной тележки; 201-направляющий ползун; 202-позиционирующий подъемный механизм; 203- статор расширительного механизма; 204-позиционирующая ведущая шестерня; 205-приводной вал расширительного механизма; 206-трехкулачковый патрон; 207-позционирующие ножки; 208-кронштейн патрона; 301- устройство кодирования угла сканирования; 302-приводной двигатель сканирования; 303-установочное гнездо механизма сканирования; 304-приводной вал сканирования; 305 -лазерное отражательное зеркало; 306-видеокамера; 307- лазерный сканер; 401-устройство кодирования высоты подъема; 402-выравнивающее основание; 403 -подъемный установочный кронштейн; 404-подъемный модуль.
Осуществление изобретения
Настоящее изобретение будет дальше описано ниже с помощью приложенных чертежей и конкретных вариантов осуществления.
Как показано на фиг.1, сканирующее измерительное устройство включает в себя транспортную тележку 1, позиционирующий механизм 2, поворотный механизм сканирования отверстий под шпильки 3 и подъемный механизм 4 сканирования отверстий под шпильки, установленные на транспортной тележке 1.
На передней и задней сторонах транспортной тележки 1 установлено по одному комплекту позиционирующего механизма 2 соответственно, и позиционирующий механизм 2 приводится в скольжение в блоке направляющих роликов 103 в транспортной тележке за счет взаимодействия зубчатых шестерен;
Подъемный механизм сканирования отверстий под шпильки 4 установлен в середине транспортной тележке 1, а поворотный механизм сканирования отверстий под шпильки 3 установлен на подъемном установочном кронштейне 403 подъемного механизма сканирования отверстий под шпильки 4. Подъемный механизм сканирования отверстий под шпильки 4 может приводить поворотный механизмом сканирования отверстий под шпильки 3 в движение вверх и вниз.
Как показано на фиг. 2, транспортная тележка 1 включает в себя дугообразную платформу 101, множество (может быть 10-30) вспомогательных опорных колес 102, установленных под платформой транспортной тележки 101, блок направляющих роликов103, установленный по обеим сторонам переднего и заднего поясных отверстий на платформе, и передаточную шестерню 104 транспортной тележки, установленную на внутренней стороне дуги платформы.
Вышеупомянутые поясные отверстия в количестве 2 используются в качестве отверстий для установки позиционирующего механизма, они расположены на передней и задней частях платформы 101. На наружной стороне длинной стороны поясных отверстий установлены блоки направляющих роликов 103 для обеспечения скольжения за счет их взаимодействия с позиционирующим механизмом 2. Движущая сила скольжения обеспечивается зацеплением позиционирующей ведущей шестерни 204 позиционирующего механизма 2 с передаточной шестерней платформы транспортной тележки 104. Блок направляющих роликов 103 имеет множество роликов с U-образными подшипниками, которые расположены в той же дугообразной форме, что и платформа транспортной тележки 101, при скольжении позиционирующий механизм 2 может ходить по предусмотренному дугообразному маршруту.
Функция многогрупповых вспомогательных опорных колес 102 состоит в том, чтобы траектория движения оси вращения вспомогательных опорных колес 102 совпадала с диаметром дуги платформы транспортной тележки 101, и платформа транспортной тележки 1 могла завершить ход по дугообразному маршруту по наведению вспомогательных опорных колес 102.
Как показано на фиг.3, позиционирующий механизм 2 включает в себя направляющий позиционирующий ползун 201, позиционирующий подъемный механизм 202, установленный на позиционирующем направляющем ползуне 201, статор расширительного механизма 203, установленный на позиционирующем подъемном механизме 202, и позиционирующая ведущая шестерня 204, установленная на одной стороне позиционирующего направляющего ползуна 201, приводной вал 205 расширительного механизма, соединенный с позиционирующим подъемным механизмом 202 и расположенный под позиционирующим направляющим ползунком 201, и трехкулачковый патрон 206, установленный на нижнем конце приводного вала 205 расширительного механизма, также включает три позиционирующей ножки 207 в отверстиях, равномерно расположенных на боковой стенке трехкулачкового патрона 206, эти ножки соединены с трехкулачковым патроном 206; указанный выше трехкулачковый патрон 206 неподвижно установлен с помощью кронштейна 208 патрона, неподвижно соединенного с нижним концом приводного вала 205 расширительного механизма. Когда приводной вал расширительного механизма вращает 205, он приводит во вращение трехкулачковый патрон 206, и три позиционирующие ножки 207 раздвигаются или сжимаются с вращением, срабатывание позиционирующего подъемного механизма 202 может приводить приводной вал расширительного механизма под ним в движение вверх-вниз.
Во время установки позиционирующий направляющий ползун 201 взаимодействует с блоком направляющих роликов 103, приводной вал расширительного механизма 205 расположен под платформой 101 транспортной тележки, а позиционирующая ведущая шестерня 204 входит в зацепление с передаточной шестерней 104 транспортной тележки.
Как показано на фигурах 1 и 3, два комплекта позиционирующего механизма 2, установленные на передней и задней сторонах платформы транспортной тележки 1, могут выполнять дугообразный ход на платформе транспортной тележки101 за счет зацепления и направляющего действия блока направляющих роликов 103 и передаточных шестерен 104 транспортной тележки. Позиционирующий механизм 2 доходит до верха отверстия под шпильку под действием блока направляющих роликов 103 и передаточной шестерни 104 транспортной тележки, и опускается до положения стенки отверстия под шпильку с помощью позиционирующего подъемного механизма 202. При этом трехкулачковый патрон 206 вращается приводным двигателем через приводной вал расширительного механизма 205, а позиционирующие ножки 207 вывинчиваются изнутри трехкулачкового патрона 206, после входа позиционирующих ножек 207 в контакт со стенкой резьбового отверстия позиционирующий механизм 2 фиксируется. После фиксирования позиционирующих механизмов 2 на передней и задней сторонах платформы транспортной тележки 1 в резьбовых отверстиях трехмерное сканирующее измерительное устройство для резьбы отверстий под шпильки главного разъема на корпусе реактора остается фиксированным на поверхности фланца, что позволяет проводить стабильное сканирование отверстий под шпильки.
Позиционирующему механизму 2 необходимо выполнить три действия, а именно дугообразный ход позиционирующего механизма 2 в блоке направляющих роликов 103, движение вверх и вниз позиционирующих опорных ножек 207 с позиционирующим подъемным механизмом 202, а также раздвижение и сжимание позиционирующих ножек 207 с трехкулачковым патроном 206.
Как показано на фиг.4, поворотный механизм для сканирования отверстий под шпильки включает в себя приводной вал сканирования 304, установленный в соответствующем установочном отверстии в платформе транспортной тележки 101, и лазерное отражательное зеркало 305, видеокамеру 306 и лазерный сканер 307, установленные на нижнем конце приводного вала сканирования 304, также включает установочное гнездо механизма сканирования 303, установленную на верхнем конце приводного вала сканирования 304, устройство кодирования угла сканирования 301 и приводной двигатель сканирования 302, установленные на установочном гнезде механизма сканирования 303; при этом приводной двигатель сканирования 302 используется для приведения в движение приводного вала сканирования 304 на нижнем конце.
Верхний конец приводного вала 304 соединен с установочным гнездом 303 сканирующего механизма, этот вал может вращаться в соответствующем установочном отверстии, но движение в вертикальном направлении ограничено, так что, когда установочное гнездо 303 сканирующего механизма перемещается вверх и вниз, оно приводит в движение приводной вал 304 сканирующего механизма вверх и вниз, не влияя на собственное вращение.
Вышеупомянутое установочное гнездо 303 сканирующего механизма соединено с подъемным установочным кронштейном 403 в подъемном механизме 4 сканирования отверстий под шпильки, когда подъемный модуль 404 в подъемном механизме сканирования отверстий под шпильки приводится в движение, он приводит подъемный установочный кронштейн 403 в движение вверх и вниз, вместе с ними установочное гнездо сканирующего механизма 303 перемещается вверх и вниз, тем самым приводится в движение верх и вниз весь поворотный механизм 3 сканирования отверстий под шпильки.
Когда поворотный механизм сканирования отверстий под шпильки 3 опускаются до требуемого заданного места, подъемный модуль 404 приостанавливает движение, и в то же время приводной двигатель 302 сканирования приводит во вращение приводной вал сканирования 304, и приводит в синхронное вращение лазерное зеркало 305, видеокамеру 306 и лазерный сканер 307 на нижнем конце приводного вала сканирования 304 для сканирования отверстия под шпильку на 360° и выполняет сканирование и формирование изображения отверстия под шпильку на заданную глубину;
В процессе сканирования устройство кодирования угла сканирования 301 записывает угол поворота приводного вала сканирования 304 в реальном времени для обсечения того, чтобы поворотный механизм сканирования отверстий под шпильки 3 смог завершить сканирование ровно на 360°;
После завершения сканирования одного участка резьбы поворотный механизм сканирования отверстий под шпильки 3 приостанавливает сканирование, а затем подъемный модуль 404 приводит поворотный механизм 3 сканирования отверстий под шпильки в целом снова в движение вниз для сканирования и формирования изображения следующего участка отверстий под шпильки; путем поворота и подъема-спуска получаются трехмерные размеры всех участков отверстий под шпильки; вплоть после того, как вся резьба отверстия под шпильку будет отсканирована, подъемный модуль 404 приводит в движение поворотный механизм 3 сканирования отверстий под шпильки вверх до самого верхнего положения.
Как показано на фиг..5, лазерное зеркало 305, видеокамера 306 и лазерный сканер 307, расположенные на нижнем конце приводного вала сканирования 304, являются сканирующими рабочими компонентами поворотного механизма 3 для сканирования отверстий под шпильки, они установлены в одной и той же плоскости. Из них лазерный сканер 307 неподвижно установлен относительно приводного вала сканирования 304, его положение и угол не регулируемы; лазерное отражательное зеркало 305 расположено сбоку от лазерного сканера 307, а угол отражения лазера можно изменять путем регулирования положения лазерного зеркала 305, таким образом, приемный порт лазерного сканера 307 может достичь наилучшего результата приема; при работе лазерного сканера 307, видеокамера 306 синхронно осуществляет съем видеозаписи, чтобы предоставить больше данных для работы по сканированию отверстий под шпильки.
Как показано на фиг. 6, подъемный механизм для сканирования отверстий под шпильки 5 включает в себя выравнивающее основание 402, неподвижно установленное на платформе транспортной тележки 101, подъемный модуль 404, установленный сбоку от выравнивающего основания 402, и подъемный установочный кронштейн 404, который соединен и взаимодействует с подъемным модулем 404 для обеспечения возможности относительного подъема и опускания, а так же и устройство кодирования высоты подъема-опускания 401, установленное на верхней части выравнивающего основания 402.
После срабатывания подъемного модуля 404, подъемный кронштейн 403, соединенный с ним, перемещается вверх и вниз и одновременно приводит в движение установочное гнездо 303 сканирующего механизма, жестко соединенное с подъемным кронштейном 403. В связи с тем, что с нижним концом установочного гнезда 303 соединен верхний конец приводного вала сканирования 304, приводной вал сканирования 304 может вращаться, но вертикальное перемещается одновременно с установочным гнездом 303 сканирующего механизма.
После завершения сканирования одного отверстия под шпильку подъемный модуль 404 приводит поворотный механизм 3 сканирования отверстия под шпильку в движение вверх до самого верхнего положения, а трехкулачковый патрон 206 позиционирующего механизма 2 на задней части платформы 1 транспортной тележки сжимается, таким образом позиционирующий механизм 2 на задней части платформы отделяется от стенки отверстия под шпильку, он поднимается до самого верхнего положения с помощью позиционирующего подъемного механизма 202, после этого за счет зацепления позиционирующей ведущей шестерни 204 с передаточной шестерней 104 транспортной тележки задний позиционирующий механизм 2 переносится на следующее резьбовое отверстие, позиционирующий механизм 2 на переднем конце платформы остается фиксированным в резьбовом отверстии, и транспортная тележка 1 также остается фиксированным; позиционирующий механизм 2 на задней части переносится на следующее резьбовое отверстие, после чего позиционирующий подъемный механизм 202 приводит трехкулачковый патрон в опускание во внутрь следующего резьбового отверстия, трехкулачковый патрон еще раз расширяется и фиксируется на стенке резьбового отверстия. При этом позиционирующие механизмы 2 на передней и задней частях транспортной тележки 1 находятся на одной и той же стороне движения и фиксируются на стенках отверстий, при этом две позиционирующей ведущей шестерни 204 одновременно вращаются по одному и тому же направлению, т.е. под этим воздействием транспортная тележка 1 приводит подъемный механизм 4 сканирования отверстий под шпильки и поворотный механизм 3 сканирования отверстий под шпильки в перемещение на следующее резьбовое отверстие, чтобы осуществлять трехмерное сканирование данного отверстия.
Изобретение относится к технологии ремонта при эксплуатации АЭС, конкретно касается трехмерного сканирующего измерительного устройства для измерения резьбы отверстий под шпильки главного разъема на корпусе реактора. Устройство включает в себя транспортную тележку, позиционирующий механизм, установленный на транспортной тележке, поворотный механизм и подъемный механизм для сканирования отверстий под шпильки. Указанный позиционирующий механизм скользит относительно транспортной тележки; поворотный механизм для сканирования отверстий под шпильки соединен с подъемным механизмом для сканирования отверстий под шпильки и приводится в движение вверх-вниз подъемным механизмом для сканирования отверстий под шпильки. Указанная транспортная тележка включает в себя дугообразную платформу транспортной тележки, вспомогательное опорное колесо под платформой транспортной тележки, блок направляющих роликов по обеим сторонам поясного отверстия на платформе транспортной тележки и передаточную шестерню транспортной тележки на внутренней стороне дуги платформы транспортной тележки. При этом поясное отверстие используется как отверстие для установки позиционирующего механизма, а с внешней стороны длинной стороны отверстия установлен блок направляющих роликов, который взаимодействует с позиционирующим механизмом для формирования скольжения. При этом передаточная шестерня транспортной тележки и позиционирующий механизм зацепляются шестернями. Технический результат заключается в возможности получать данные резьбы отверстий под шпильки главного разъема на корпусе реактора АЭС, а также позволяет лучше адаптироваться к сканирующему измерению отверстий под шпильки главного разъема различных размеров на корпусе реактора. 12 з.п. ф-лы, 6 ил. 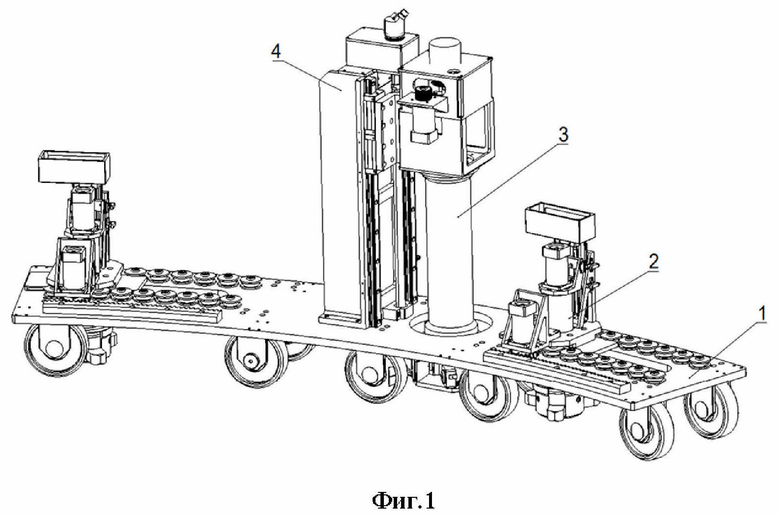
1. Трехмерное сканирующее устройство для измерения резьбы отверстий под шпильки главного разъема на корпусе реактора, характеризующееся тем, что оно включает транспортную тележку (1), позиционирующий механизм (2), установленный на транспортной тележке (1), поворотный механизм для сканирования отверстий под шпильки (3) и подъемный механизм для сканирования отверстий под шпильки (4), при этом позиционирующий механизм (2) выполнен с возможностью скольжения относительно транспортной тележки (1), подъемный механизм для сканирования отверстий под шпильки (4) расположен в середине транспортной тележки (1), а поворотный механизм для сканирования отверстий под шпильки (3) соединен с подъемным механизмом для сканирования отверстий под шпильки (4) и приводится в движение вверх-вниз подъемным механизмом для сканирования отверстий под шпильки (4), причем указанная транспортная тележка (1) включает в себя дугообразную платформу транспортной тележки (101), вспомогательное опорное колесо (102) под платформой транспортной тележки (101), блок направляющих роликов (103) по обеим сторонам поясного отверстия на платформе транспортной тележки (101) и передаточную шестерню транспортной тележки (104) на внутренней стороне дуги платформы транспортной тележки (101), причем поясное отверстие используется как отверстие для установки позиционирующего механизма, а с внешней длинной стороны отверстия установлен блок направляющих роликов(103), который взаимодействует с позиционирующим механизмом (2) для формирования скольжения, при этом передаточная шестерня (104) транспортной тележки и позиционирующий механизм (2) зацепляются шестернями, при этом в позиционирующий механизм (2) входят позиционирующий направляющий ползун (201), позиционирующий подъемный механизм (202) и статор расширительного механизма (203), который расположен на позиционирующем направляющем ползуне (201), позиционирующая ведущая шестерня (204), расположенная на одной стороне позиционирующего направляющего ползуна (201), приводной вал расширительного механизма (205), соединенный с позиционирующим подъемным механизмом (202) и расположенный под позиционирующим направляющим ползуном (201); позиционирующий подъемный механизм (202) приводит в движение приводной вал расширительного механизма (205) под ним вверх и вниз; причем позиционирующий направляющий ползун (201) и блок направляющих роликов (103) взаимодействуют, приводной вал (205) расширительного механизма расположен под платформой транспортной тележки (101), а позиционирующая ведущая шестерня (204) входит в зацепление с передаточной шестерней транспортной тележки (104), а поворотной механизм для сканирования отверстий под шпильки (3) включает в себя приводной вал сканирования (304) в соответствующем установочном отверстии на транспортной тележке (1), рабочий сканирующий блок, расположенный на нижнем конце приводного вала сканирования (304), и установочное гнездо механизма сканирования (303) на верхнем конце приводного вала сканирования (304), установочное гнездо механизма сканирования (303) приводится в движение вверх и вниз подъемным механизмом для сканирования отверстий под шпильки (4); приводной вал сканирования (304) приводится во вращение приводным двигателем сканирования (302), и приводной двигатель сканирования (302) установлен на установочном гнезде механизма сканирования (303).
2. Устройство по п.1, характеризующееся тем, что имеется множество вспомогательных опорных колес (102), соединительная линия осей вращения которых совмещается с диаметром дуги платформы транспортной тележки (101).
3. Устройство по п.1, характеризующееся тем, что на нижнем конце приводного вала (205) расширительного механизма предусмотрен трехкулачковый патрон (206), который установлен через кронштейн (208) патрона, жестко соединенный с нижним концом приводного вала (205) расширительного механизма.
4. Устройство по п.3, характеризующееся тем, что по окружности боковой стенки трехкулачкового патрона (206) равномерно обработаны установочные отверстия, в которых имеются позиционирующие ножки (207), соединенные с трехкулачковым патроном (206).
5. Устройство по п.4, характеризующееся тем, что на передней и задней сторонах транспортной тележки (1) предусмотрены по одному комплекту позиционирующего механизма (2) соответственно, а позиционирующий механизм (2) доходит до верха отверстия под шпильку под действием блока направляющих роликов (103) и передаточной шестерни транспортной тележки (104), позиционирующий подъемный механизм (202) опускается до положения стенки резьбового отверстия, а приводной вал расширительного механизма (205) приводит трехкулачковый патрон (206) во вращение вместе с ним, а позиционирующие ножки (207) вывинчиваются из трехкулачкового патрона (207 ) и приводят позиционирующие ножки (207) в соприкосновение со стенкой резьбового отверстия, чтобы зафиксировать позиционирующий механизм (2).
6. Устройство по п.1, характеризующееся тем, что в рабочий сканирующий блок входят лазерное отражательное зеркало (305), расположенное на нижнем конце приводного вала для сканирования (304), видеокамера (306) и лазерный сканер (307), эти три элемента установлены на одной плоскости; лазерный сканер (307) установлен неподвижно относительно вала привода сканирования (304), и его положение и угол нерегулируемы; лазерное отражательное зеркало (305) расположено сбоку от лазерного сканера (307), а положение лазерного отражательного зеркала (305) регулируется для изменения угла отражения лазера.
7. Устройство по п.1, характеризующееся тем, что на установочном гнезде механизма сканирования (303) предусмотрено устройство кодирования угла сканирования (301), которое записывает в реальное время угол поворота приводного вала сканирования (304).
8. Устройство по п.6, характеризующееся тем, что после опускания поворотного механизма (3) сканирования отверстий под шпильки до заданного положения подъемный механизм сканирования отверстий под шпильки (4) приостанавливает функцию подъема, приводной двигатель сканирования (302) приводит в синхронное вращение приводной вал сканирования (304) и приводит во вращение лазерное зеркало (305), видеокамеру (306) и лазерный сканер (307) на нижнем конце приводного вала сканирования (304) для выполнения сканирования отверстий под шпильки на 360°.
9. Устройство по п.1, характеризующееся тем, что подъемный механизм (5) сканирования отверстий под шпильки включает в себя выравнивающее основание (402), расположенное на транспортной тележке (1), подъемный модуль (404), расположенный сбоку от выравнивающего основания (402), и подъемный установочный кронштейн (403), который соединен и взаимодействует с подъемным модулем (404) и может относительно него подняться; подъемный установочный кронштейн (403) соединен с поворотным механизмом сканирования отверстий под шпильки (3) и приводит его в движение вверх и вниз.
10. Устройство по п.9, характеризующееся тем, что на верхней части выравнивающего основания (402) предусмотрено устройство кодирования высоты подъема (401).
| ПРОЦЕССОР СИГНАЛОВ И СПОСОБ ОБЕСПЕЧЕНИЯ ОБРАБОТАННОГО АУДИОСИГНАЛА С ПОДАВЛЕННЫМ ШУМОМ И ПОДАВЛЕННОЙ РЕВЕРБЕРАЦИЕЙ | 2018 |
|
RU2768514C2 |
| US 5193405 A, 16.03.1993 | |||
| US 4315688 A, 16.02.1982 | |||
| УПРАВЛЯЕМЫЙ/АВТОНОМНЫЙ РАЗМЕТОЧНЫЙ МОСТ | 2006 |
|
RU2367625C1 |

