Изложенное ниже относится к управляющему аппарату для управления перемещением стола пациента в системе формирования изображений и находит конкретное применение в компьютерной томографии (КТ). Однако это применимо также к другим системам формирования изображений, которые используют подвижный стол пациента с целью перемещения пациента внутри и снаружи зоны обследования до, во время и/или после сканирования пациента.
Системы формирования изображений, такие как томографы для компьютерной томографии (КТ), позитронно-эмиссионной томографии (ПЭТ), и т.п., включают в себя электронно управляемый подвижный стол пациента для перемещения пациента по отношению к зоне обследования томографа до, во время и/или после сканирования. Перемещение стола пациента управляется посредством команд или инструкций, автоматически или вручную (например, вводом от пользователя) посылаемых с консоли оператора системы формирования изображений на стол пациента. Пульт управления столом пациента располагается также на обшивке томографа. Этот пульт управления представляет специалисту в процедурном кабинете возможность загрузки и обеспечения нужного положения пациента до начала сканирования и выгрузки пациента из зоны обследования по окончании сканирования, находясь при этом в процедурном кабинете.
В одной такой системе пульт управления столом пациента включает в себя четыре (4) отдельные физические кнопки, соответственно для перемещения стола пациента вверх, вниз, внутрь и наружу. В такой системе перемещение по диагонали достигается одновременным нажатием двух (2) кнопок (например, вверх и внутрь, вниз и наружу, и т.п.). Другая система включает в себя дополнительные кнопки для перемещения по диагонали. Такие кнопки сгруппированы на обшивке томографа вместе с другими кнопками управления, что приводит к довольно запутанной и сложной компоновке, которая зачастую требует от оператора системы сосредоточить свое внимание на органах управления, чтобы увериться в том, что нажимается правильная кнопка. В другой системе используется дисплей с сенсорным экраном, имеющий графические виртуальные кнопки, а не физические кнопки. Такие виртуальные кнопки требуют даже большего внимания, поскольку они не обеспечивают какой-либо тактильной обратной связи.
В некоторых из вышеупомянутых систем реализованы относительно сложные схемы нажатия кнопок для обеспечения медленного и быстрого перемещения. Например, в одной системе должна нажиматься отдельная кнопка изменения скорости для переключения между режимами быстрого и медленного перемещения до нажатия кнопки, соответствующей желаемому направлению перемещения. Другая система включает в себя дополнительную пятую кнопку, которая должна нажиматься и удерживаться одновременно с кнопкой желаемого направления, для того чтобы повысить скорость перемещения. Поэтому в такой схеме нужны два пальца, чтобы перемещать пациента в одном направлении, или три пальца, чтобы перемещать пациента по диагонали, поскольку отсутствует выделенная кнопка перемещения до диагонали. Еще в одной системе скорость перемещения автоматически возрастает с низкой до высокой после нажатия кнопки в течение заданного периода времени. Это может привести к "переходу" за нужное положение или "недоходу" до него, если оператор либо ожидает, когда произойдет изменение скорости, либо не подозревает об изменении скорости.
Некоторые системы включают в себя педаль ножного управления для управления скоростью и/или загрузкой и выгрузкой пациента. В общем случае педаль ножного управления является отдельным устройством, которое электрически соединено с системой формирования изображений кабелем или подобным элементом. Добавление такого устройства еще более усложняет систему и ее эксплуатацию. В одной интервенционной системе ручка управления, подобная джойстику для компьютерных игр, была использована для обеспечения дополнительного двунаправленного горизонтального перемещения. В такой системе джойстик прикреплен к столу пациента и поворачивается только вдоль одного направления для двунаправленного перемещения в зону и из зоны обследования. Двухпозиционный джойстик в общем случае располагается по отношению к столу пациента в пределах досягаемости для рук врача на боковой стороне стола пациента и служит для конкретной цели обеспечения горизонтального перемещения лежащего на столе пациента во время интервенционной процедуры.
Вышеупомянутые органы управления перемещением стола пациента, так же как и другие общепринятые органы управления перемещением стола пациента, могут быть довольно неудобными в использовании и обеспечивать менее функциональных возможностей чем желательно. Например, в системе, которая не обеспечивает перемещения по диагонали (например, либо с помощью выделенных кнопок, либо одновременного перемещения по горизонтали и вертикали), оператор должен последовательно перемещать стол в вертикальном и горизонтальном направлениях, чтобы имитировать перемещение по диагонали. Поэтому оператору придется несколько раз переключаться между перемещением по вертикали и горизонтали, чтобы достигнуть желаемого целевого положения. Это может потребовать от оператора полностью сосредоточиться на столе пациента, когда он движется и достигает различных предельных положений по вертикали и горизонтали, определенных границей столкновений, и на органах управления, поскольку оператор должен переключаться между кнопками. Это может также увеличить время, которое потребуется, чтобы достичь заданного положения, и тем самым время обследования пациента, что может снизить пропускную способность при обследовании пациентов. Кроме того, это потребует использования множества кнопок управления.
Более того, органы управления на дисплее с сенсорным экраном не обеспечивают тактильной обратной связи, и поэтому специалисты зачастую должны сосредоточить свое внимание на дисплее с сенсорным экраном, чтобы быть уверенными в том, что они задействовали правильный орган управления, вместо того, чтобы сосредоточиться на пациенте. Что касается органа управления скоростью стола пациента, он может быть громоздким и иметь неудобную конфигурацию управления, которая потребует использования нескольких пальцев, чтобы одновременно нажимать разные кнопки в запутанной компоновке, или сложной последовательности нажатия кнопок для переключения между скоростями. Задержанная реакция на нажатие кнопки при переключении между скоростями может привести к ситуациям, когда оператор должен ждать несколько секунд, пока стол перемещается со скоростью, ниже желаемой, за которой следует резкое изменение на высокую скорость, при этом оператор, не ожидавший такого изменения скорости, может перейти за желаемую целевую позицию.
Аспекты настоящей заявки направлены на вышеупомянутые и другие предметы обсуждения.
Согласно одному аспекту, система формирования изображений включает в себя неподвижный гентри, имеющий переднюю сторону и зону обследования. Система формирования изображений дополнительно включает в себя стол пациента, выполненный с возможностью помещения находящегося на нем объекта или субъекта в зону обследования. Система формирования изображений дополнительно включает в себя пульт управления перемещением стола пациента, прикрепленный к неподвижному гентри и включающий в себя единый многопозиционный орган управления, который управляет перемещением стола пациента по горизонтали, вертикали и диагонали внутри и снаружи зоны обследования.
Согласно другому аспекту, способ включает в себя управление перемещением по вертикали, горизонтали и диагонали стола пациента в системе формирования изображений посредством единого многопозиционного органа управления, расположенного на системе формирования изображений.
Согласно другому аспекту, пульт управления перемещением стола пациента включает в себя единый многопозиционный орган управления, прикрепленный к системе формирования изображений, причем этот единый многопозиционный орган управления управляет перемещением стола пациента по горизонтали, вертикали и диагонали внутри и снаружи зоны обследования системы формирования изображений.
Изобретение может быть реализовано в форме разных компонентов и компоновок компонентов, и в форме разных этапов и построений этапов. Чертежи служат только в целях иллюстрации предпочтительных вариантов реализации и не должны рассматриваться как ограничивающие изобретение.
ФИГ.1 - система формирования изображений с пультом управления перемещением стола пациента, прикрепленным к системе формирования изображений.
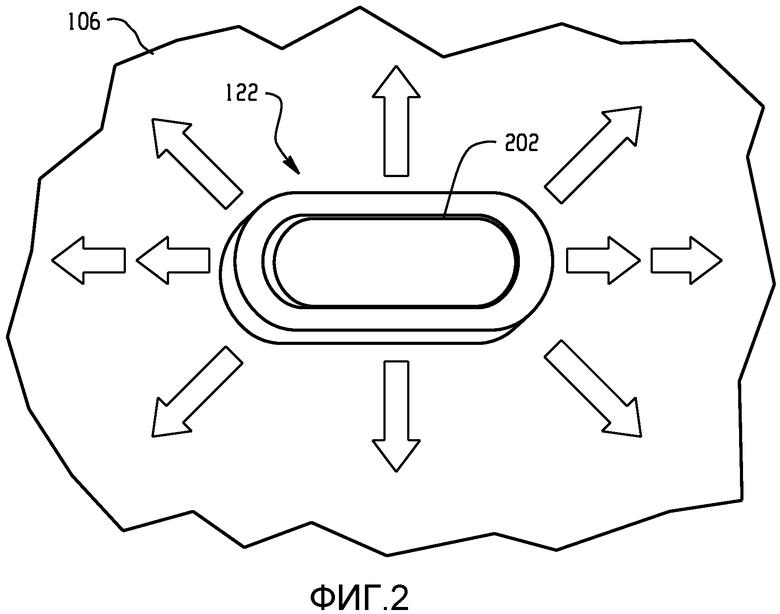
ФИГ.2 - пример единого многопозиционного органа управления пульта управления перемещением стола пациента.
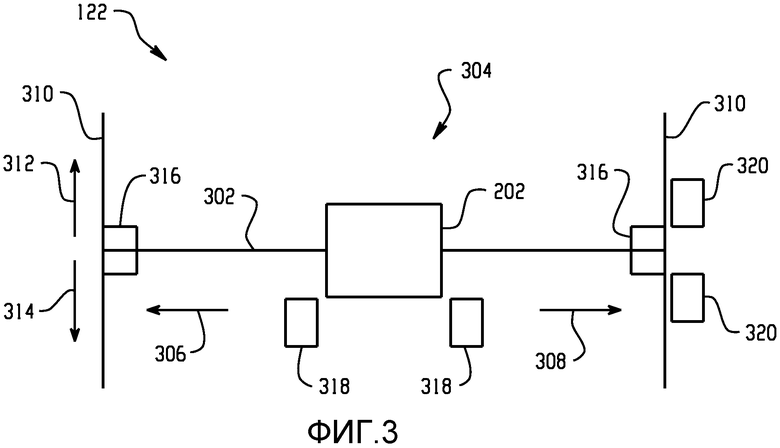
ФИГ.3 - пример передвижения единого многопозиционного органа управления для инициации перемещения.
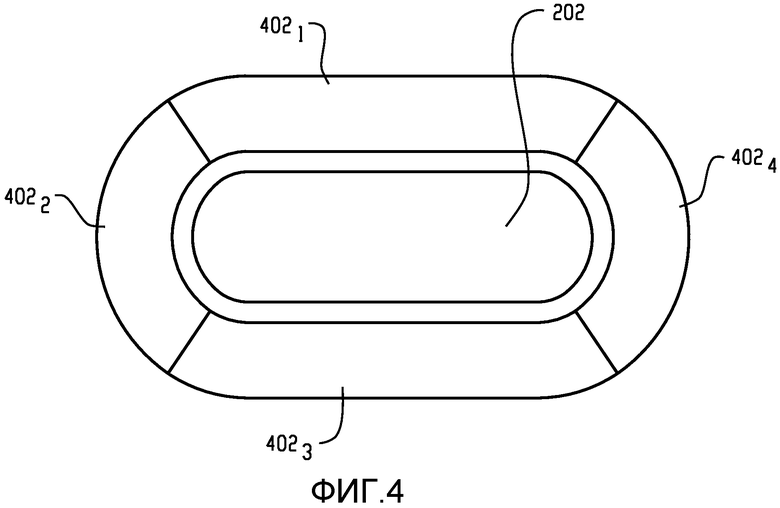
ФИГ.4 - пример индикаторов, которые указывают допустимое передвижение органа управления перемещением стола пациента.
ФИГ.5 - вариант реализации, в котором пульт управления перемещением стола пациента подвижно прикреплен к вертикальным дорожкам на передней стороне системы формирования изображений.
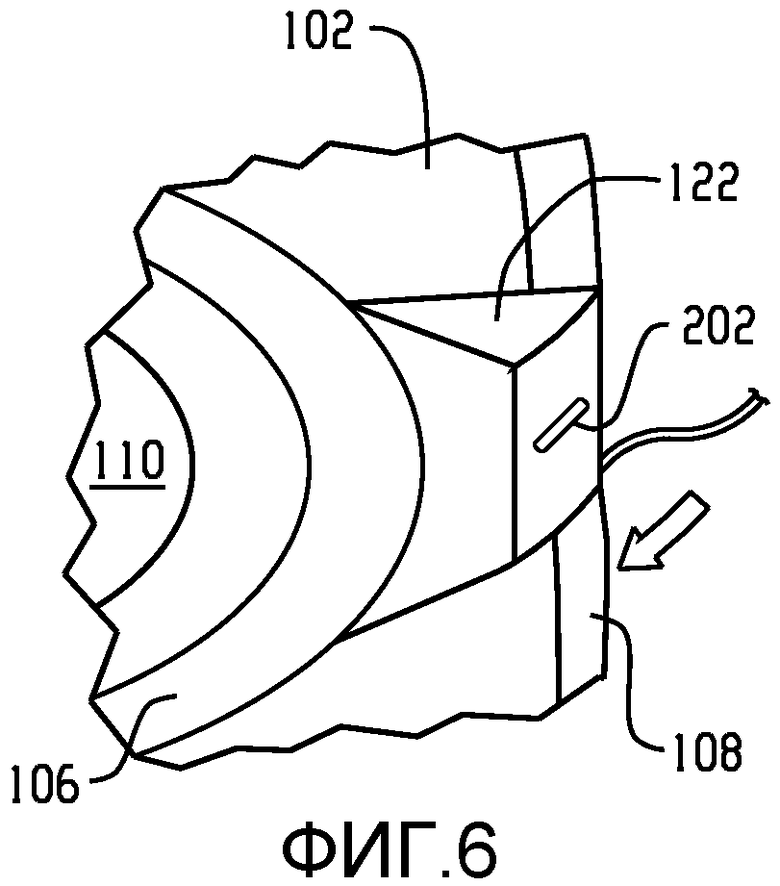
ФИГ.6 - вариант реализации, в котором пульт управления перемещением стола пациента прикреплен к боковой стороне системы формирования изображений.
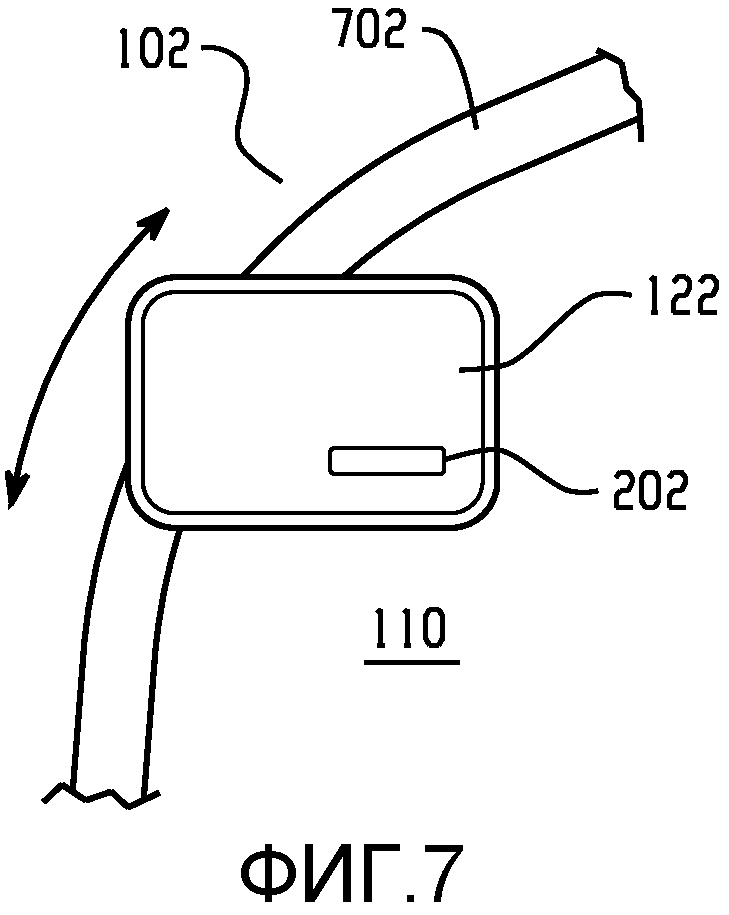
ФИГ.7 - вариант реализации, в котором пульт управления перемещением стола пациента подвижно прикреплен к кольцеобразному пазу, который окружает зону обследования.
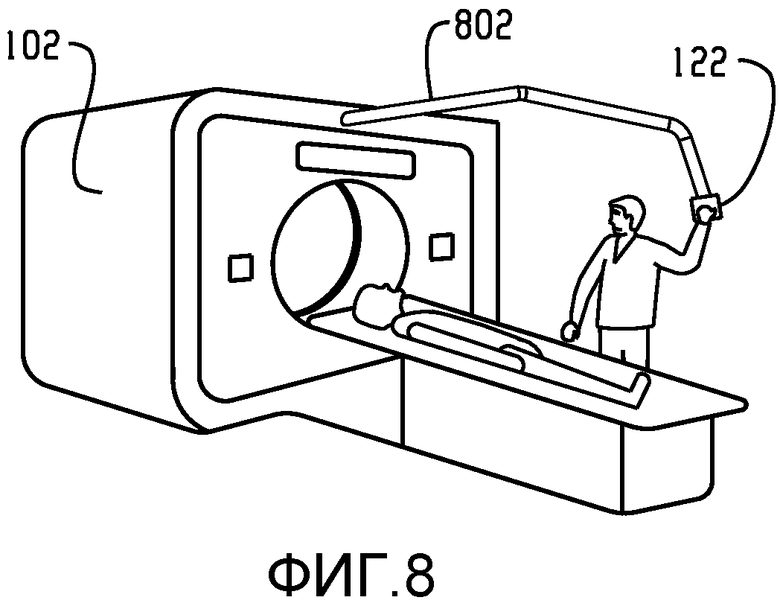
ФИГ.8 - вариант реализации, в котором пульт управления перемещением стола пациента прикреплен к подвижному рычагу системы формирования изображений.
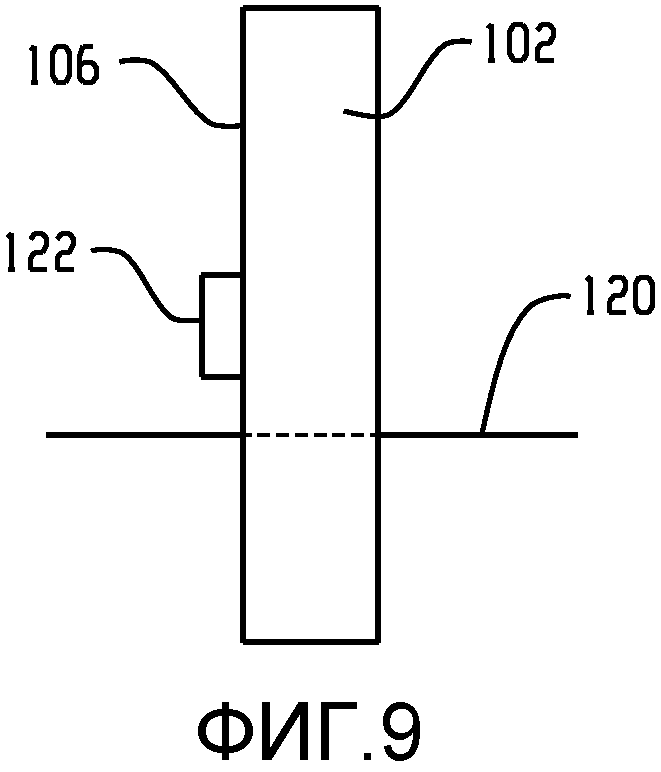
ФИГ.9 - вариант реализации, в котором пульт управления перемещением стола пациента выступает из лицевой стороны системы формирования изображений.
ФИГ.10 - вариант реализации, в котором пульт управления перемещением стола пациента расположен в углублении на лицевой стороне системы формирования изображений.
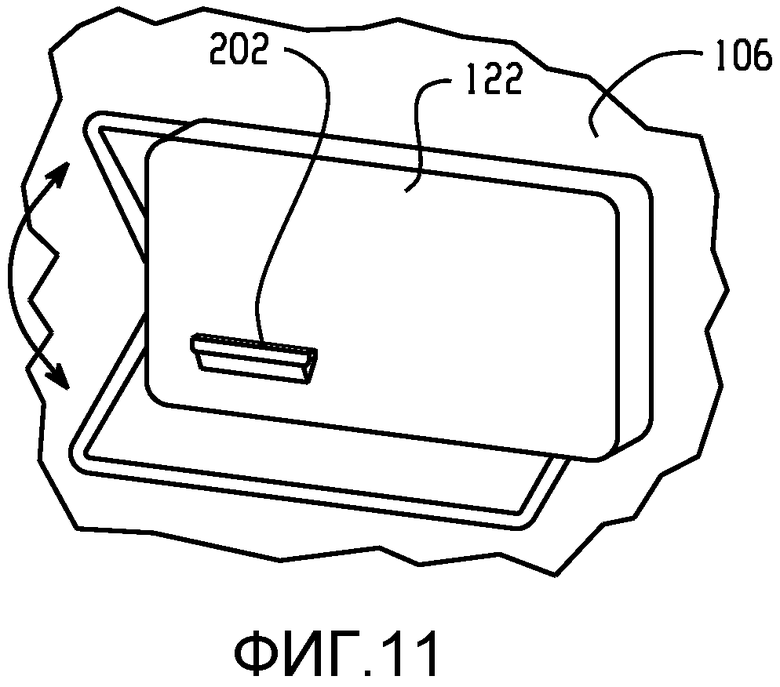
ФИГ.11 - вариант реализации, в котором пульт управления перемещением стола пациента прикреплен с возможностью поворота к лицевой стороне системы формирования изображений.
ФИГ.12 - вариант реализации, в котором пульт управления перемещением стола пациента прикреплен с возможностью поворота к боковой стороне системы формирования изображений.
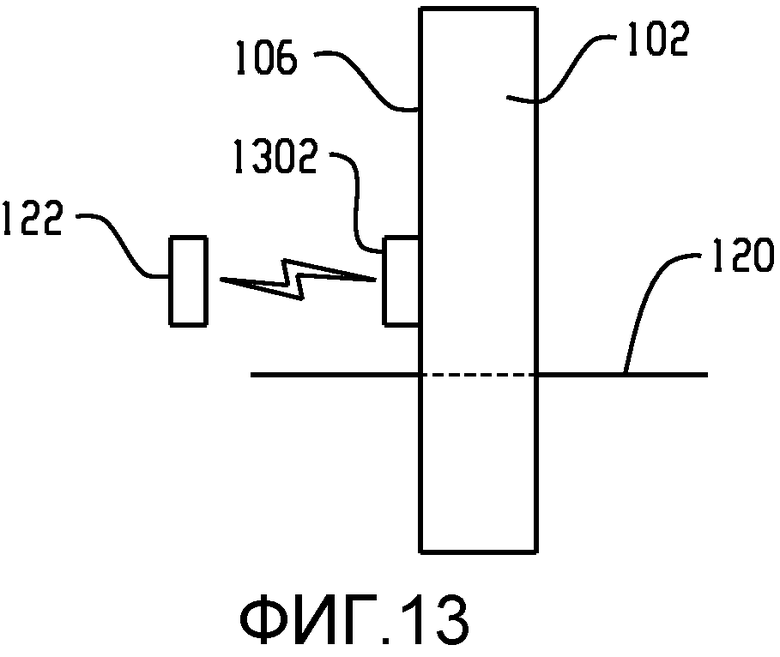
ФИГ.13 - вариант реализации, в котором пульт управления перемещением стола пациента дистанционно связан с системой формирования изображений.
ФИГ.14 - иллюстрация способа использования пульта управления перемещением стола пациента.
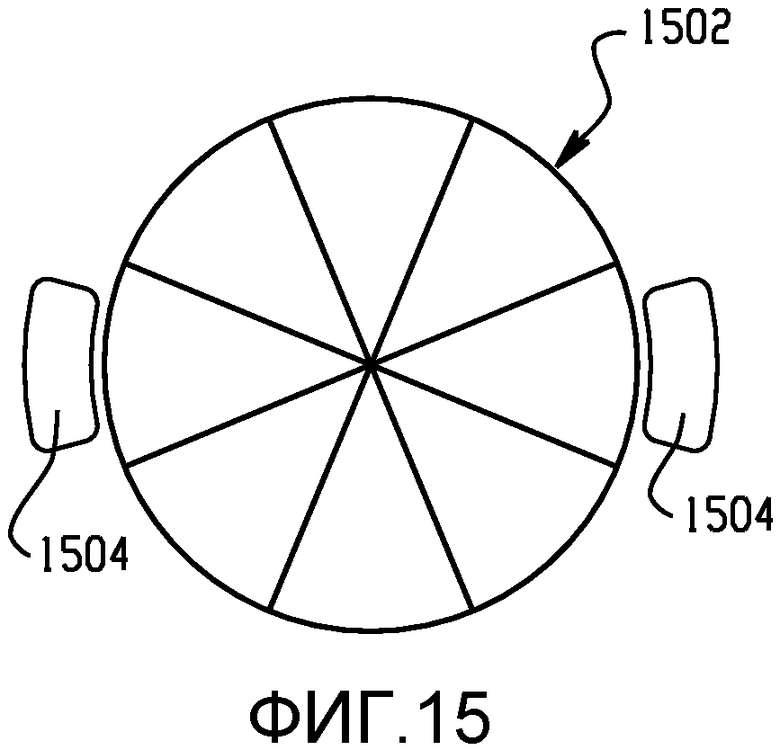
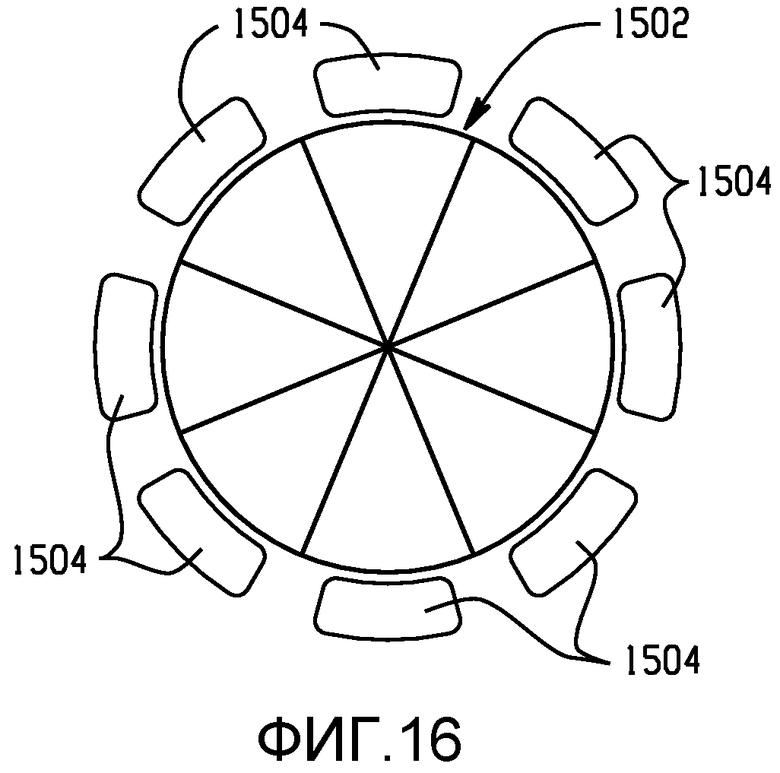
ФИГ.15 и 16 - варианты реализации, в которых пульт управления включает в себя кулисный переключатель для управления направлением перемещения и по меньшей мере один другой переключатель для управления скоростью.
Изложенное ниже в общем случае относится к пульту управления для перемещения стола пациента, который связан с системой формирования изображений. Для ясности и краткости изложения ниже описывается пульт управления в контексте компьютерной томографии (КТ). Однако этот пульт управления может подобным же образом использоваться с другими способами формирования изображений, такими как магниторезонансная томография (МРТ), позитронно-эмиссионная томография (ПЭТ), однофотонная эмиссионная компьютерная томография (ОФЭКТ), ультразвуковое исследование (УЗИ) и/или другие способы формирования изображений.
Как будет более подробно описано ниже, этот пульт управления может включать в себя многоосевой единый орган управления, который приводит в действие различные переключатели для обеспечения управляемого перемещения по горизонтали, вертикали и диагонали, а также для управления скоростью перемещения. Такой орган обеспечивает интуитивное управление, которое позволяет оператору перемещать пациента внутри и снаружи (путем сочетания перемещений по вертикали, горизонтали и/или диагонали) зоны обследования с разными скоростями со стороны стола пациента, пользуясь одной рукой, не глядя на пульт управления перемещением стола пациента. Поэтому специалист может сосредоточить свое внимание на пациенте и перемещать пациента в желаемое целевое местоположение относительно быстро, что может сократить время, в течение которого пациент должен находиться в зоне обследования, и тем самым увеличить пропускную способность, повысить безопасность и точность позиционирования, и т.п.
На фиг. 1 показана система 100 формирования изображений, такая как томограф для компьютерной томографии (КТ). Однако должно быть понятно, что здесь могут предполагаться и другие способы формирования изображений. Система 100 формирования изображений включает в себя в общем случае неподвижный гентри 102 и поворотный гентри 104. Неподвижный гентри 102 включает в себя, по меньшей мере, переднюю сторону 106 (которая является стороной неподвижного гентри для загрузки и выгрузки пациента) и две боковые стороны 108. Поворотный гентри 104 поддерживается неподвижным гентри 102 с возможностью поворота и поворачивается вокруг зоны 110 обследования относительно продольной или z-оси 112.
Источник 114 излучения, такой как рентгеновская трубка, поддерживается поворотным гентри 104. Источник 114 излучения испускает излучение из локального пятна, и это излучение проходит через зону 110 обследования. Коллиматор источника включает в себя элементы коллимации, которые коллимируют излучение, образуя в общем случае конусообразный, клинообразный, веерообразный или имеющий другую форму луч излучения. Двухмерная детекторная матрица 116, чувствительная к излучению, образует дугу окружности в зоне обследования напротив источника 114 излучения. Детекторная матрица 116 включает в себя множество рядов детекторов, которые продолжаются в направлении z-оси 112. Детекторная матрица 116 обнаруживает излучение, пересекающее зону 110 обследования, и генерирует проекционные данные, определяющие его.
Восстанавливающее устройство 118 восстанавливает проекционные данные и генерирует данные трехмерного (3D) волюметрического изображения, определяющие его. Восстанавливающее устройство 118 может использовать при восстановлении обычный алгоритм фильтрованных обратных проекций, алгоритм конусообразного луча и/или другой алгоритм восстановления.
Стол 120 пациента, такой как кушетка, поддерживает объект или субъекта, такого как пациент-человек, в зоне 110 обследования. Стол 120 пациента выполнен с возможностью перемещения по вертикали (по оси y), по горизонтали (по оси z) и по диагонали (сочетание осей y и z) относительно зоны 110 обследования до, во время и после сканирования.
Пульт 122 управления перемещением стола пациента управляет перемещением стола 120 пациента. В иллюстрируемом варианте реализации пульт 122 управления перемещением стола пациента расположен на передней стороне 106 неподвижного гентри 102 и включает в себя два ряда органов 122 управления перемещением стола пациента, по одному с каждой стороны зоны 110 обследования. Органы 122 управления перемещением стола пациента могут располагаться на высоте, без труда видимой и доступной для специалиста, проводящего радиологическое обследование, или другого уполномоченного персонала, стоящего со стороны стола 120 пациента. Другие варианты реализации включают в себя большее или меньшее число рядов органов 122 управления перемещением стола пациента, расположенных в аналогичных и/или других местах.
Компьютерная система или компьютер общего назначения служит в качестве консоли 124 оператора. Процессор консоли 124 выполняет машиночитаемые команды на консоли 124, что позволяет оператору управлять работой системы 100, как, например, перемещением стола 120 пациента, запуском сканирования, и т.п.
На фиг. 2 приведен пример пульта 122 управления перемещением стола пациента. Показанный пульт 122 управления перемещением стола пациента включает в себя единый многопозиционный орган 202 управления, который выполнен с возможностью приведения в действие альтернативно одного или более из множества наборов переключателей, например, двух, четырех, восьми, десяти, шестнадцати, и т.д., наборов переключателей. Показанный единый многопозиционный орган 202 управления выполнен с возможностью приведения в действие десяти (10) наборов переключателей, включающих в себя переключатели перемещения вверх, вниз, по диагонали внутрь, по диагонали наружу, медленного перемещения внутрь, медленного перемещения наружу, быстрого перемещения внутрь и быстрого перемещения наружу.
В этом варианте реализации единый многопозиционный орган 202 управления включает в себя ползунковый переключатель, который скользит вдоль одного или более каналов (не видны), чтобы приводить в действие разные наборы переключателей для обеспечения конкретного направления перемещения и/или скорости (например, одного из вариантов отсутствия скорости, многих дискретных скоростей, переменной скорости, и т.п.). Для информации на фиг. 2 показаны стрелки направления и скорости, причем число стрелок направления соответствует скорости. Однако эти стрелки направления не являются физически частью пульта 122 управления перемещением стола пациента. Эти стрелки показаны для описания операции.
Скольжение единого многопозиционного органа 202 управления в направлении вверх приводит в действие набор переключателей, которые заставляют стол 120 пациента перемещаться по вертикали в направлении вверх со скоростью движения вверх. Сдвиг единого многопозиционного органа 202 управления в направлении вниз приводит в действие набор переключателей, которые заставляют стол 120 пациента перемещаться по вертикали в направлении вниз. Скольжение единого многопозиционного органа 202 управления в одном из четырех (4) диагональных направлений приводит в действие соответствующий набор переключателей, заставляющих стол 120 пациента перемещаться по диагонали в выбранном диагональном направлении.
Скольжение единого многопозиционного органа 202 управления влево в первое положение приводит в действие набор переключателей, которые заставляют стол 120 пациента перемещаться либо внутрь, либо наружу из зоны 110 обследования с первой скоростью. Скольжение многопозиционного единого элемента 202 управления еще дальше влево во второе положение приводит в действие набор переключателей, которые заставляют стол 120 пациента перемещаться в том же направлении, но со второй, другой скоростью. Скольжение единого многопозиционного органа 202 вправо в первое положение приводит в действие набор переключателей, которые заставляют стол 120 пациента перемещаться в противоположном направлении с первой скоростью. Скольжение единого многопозиционного органа 202 управления еще дальше вправо во второе положение приводит в действие набор переключателей, которые заставляют стол 120 пациента перемещаться в том же направлении, но со второй, другой скоростью.
В этом варианте реализации может быть обеспечена обратная связь с оператором, так что оператор знает, находится ли единый многопозиционный орган 202 управления в первом или во втором положении, когда он сдвигает посредством скольжения этот элемент влево или вправо. В одном случае тактильная обратная связь (например, вибрация от фиксатора или тому подобное) обеспечивается при переходе от первого во второе положение, и/или наоборот. Дополнительно или альтернативно звуковая обратная связь (например, гудок, жужжание, сообщение, и т.п.) обеспечивается при переходе из первого во второе положение, или наоборот. Дополнительно или альтернативно визуальная обратная связь (например, свет, мигание света, воспроизведение на дисплее буквенно-цифрового сообщения, и т.п.) обеспечивается при переходе из первого во второе положение, или наоборот.
Должно быть понятно, что отдельное перемещение может быть вызвано механическими контактными переключателями (например, линейными, поворотными, и т.п.), магнитными переключателями (например, герконовым переключателем) и/или другими переключателями. Кроме того, для перемещения по вертикали и горизонтали каждое направление перемещения задается посылкой соответствующего сигнала управления. Для перемещения по диагонали либо одновременно посылаются соответствующие сигналы перемещения по горизонтали и вертикали, либо посылается единственный сигнал перемещения по диагонали.
На фиг. 3 приведен не ограничивающий пример того, как движется единый многопозиционный орган 202 управления. В этом примере пульт 122 управления перемещением стола пациента включает в себя первую направляющую 302, с которой единый многопозиционный орган 202 управления связан подвижно через линейную опору качения, такую как шарикоподшипник, роликовый подшипник, гидравлический подшипник или подобную опору. Единый многопозиционный орган 202 управления показан находящимся в исходной позиции или в позиции 304 покоя.
Единый многопозиционный орган 202 управления может удерживаться в исходной позиции посредством пружины, стопора, магнита, защелки и/или другим способом. Единый многопозиционный орган 202 управления выполнен с возможностью скольжения по направляющей 302 в первом и втором направлениях 306 и 308. Скольжение единого многопозиционного органа 202 управления в одном из направлений 306 или 308 приводит в действие переключатель, который обеспечивает перемещение стола пациента в зону 110 обследования. Скольжение единого многопозиционного органа 202 управления в противоположном направлении приводит в действие переключатель, который обеспечивает перемещение стола пациента из зоны 110 обследования.
Первая направляющая 302 поддерживается двумя вторыми направляющими 310. Первая и вторые направляющие 302 и 310 перпендикулярны по отношению друг к другу. Первая направляющая 302 подвижно подсоединена ко вторым направляющим 310 через линейную опору качения, такую как шарикоподшипник, роликовый подшипник, гидравлический подшипник или им подобную опору. Первая направляющая 302 выполнена с возможностью скольжения по вторым направляющим 310 в третьем и четвертом направлениях 312 и 314. Скольжение единого многопозиционного органа 202 управления в одном из направлений 312 или 314 приводит в действие переключатель, который инициирует перемещение стола пациента по вертикали вверх. Скольжение единого многопозиционного органа 202 управления в противоположном направлении приводит в действие переключатель, который инициирует перемещение стола пациента по вертикали вниз.
Для обеспечения перемещения по диагонали единый многопозиционный орган 202 управления скользит посредством сочетания упомянутых выше перемещений.
В иллюстрируемом варианте реализации переключатели 318 обеспечивают информацию по горизонтальному направлению, переключатели 316 используются для переключения скорости движения по горизонтали между низкой и высокой скоростью, а переключатель 320 обеспечивает информацию по вертикальному направлению. Переключатели 316-320, включая их позицию и размеры, представлены в пояснительных целях, а не в целях ограничения. Как было упомянуто выше, один или более из переключателей 316-320 может быть механическим контактным, магнитным и/или другим типом переключателя. При этом предполагаются другие подходы для определения желаемого направления и скорости перемещения.
На фиг. 4 представлен вариант реализации, в котором индикаторы 402 (4021, 4022, 4023 и 4024) используются для указания осуществляемого перемещения стола пациента. Например, индикаторы 402 могут включать в себя световые компоненты, которые включаются или загораются, когда осуществляется перемещение в конкретном направлении. Перемещение в конкретном направлении может осуществляться, например, когда перемещение в этом направлении происходит в пределах границы столкновений или других программных или механических границ системы.
Представленный вариант реализации включает в себя четыре (4) световых компонента, которые окружают единый многопозиционный орган 202 управления и которые включаются, когда осуществляется перемещение в данном направлении. Перемещение по диагонали осуществляется, когда включаются соответствующий индикатор перемещения по вертикали и соответствующий индикатор перемещения по горизонтали. Подходящие световые компоненты включают в себя один или более светоизлучающих диодов (LED), лазеров и/или других световых компонентов. Такие световые компоненты могут освещать всю визуальную зону индикаторов 402 и/или окружающую их зону и/или ее часть, например, полупрозрачную крышку или нечто подобное. В другом варианте реализации световые компоненты являются частью и/или выполняются заодно с единым многопозиционным органом 202 управления.
Предполагаются изменения и другие варианты реализации.
Как было отмечено выше, единый многопозиционный орган 202 управления может включать в себя больше или меньше чем 10 позиций. В качестве примера в другом варианте реализации перемещения в направлениях вверх, вниз и по диагонали могут также осуществляться с другими скоростями для двенадцати позиций. В другом случае направления перемещения влево и вправо (внутрь и наружу) являются перемещениями с одной или более чем с двумя разными скоростями для органа управления с восемью или более чем с десятью позициями.
В другом варианте реализации единый многопозиционный орган 202 управления реализован в виде шарнирного переключателя, такого как джойстик. При такой конфигурации переключатель может быть "свободно плавающим" в том смысле, что он может перемещаться из одного положения в другое по всем десяти позициям, не возвращаясь по каналу или дорожке через центральное положение. В другом варианте реализации поворотное движение переключателя направляется по каналам.
В другом варианте реализации единый многопозиционный орган 202 управления может дополнительно включать в себя поворотный переключатель, выполненный с возможностью управления параметрами перемещения стола 120 пациента (например, перемещением по диагонали, выбором скорости, и т.п.) и/или управления другими функциональными возможностями системы, такими как наклоном гентри, инжектором, амортизатором, ЭКГ монитором, лазерной подсветкой гентри, аварийной сигнализацией, и т.п.
В другом варианте реализации единый многопозиционный орган 202 управления может быть выполнен с возможностью преодоления различных программных предельных значений. В таком варианте реализации, когда перемещение прекращается при нахождении единого многопозиционного органа 202 управления в активизированном состоянии, оператор может отпустить единый многопозиционный орган 202 управления и затем снова активизировать единый многопозиционный орган 202 управления в том же направлении. Если преодоление программного предельного значения возможно, стол 120 пациента будет опять перемещаться в этом направлении до тех пор, пока не будет достигнуто другое предельное значение или оператор не прекратит активизацию единого многопозиционного органа 202 управления.
В другом варианте реализации управление скоростью производится на основе того, насколько трудно и/или быстро единый многопозиционный орган 202 управления сдвигается в конкретном направлении.
В другом варианте реализации единый многопозиционный орган 202 управления способен программироваться по меньшей мере на одно из: направления или скорости перемещения.
В другом варианте реализации скорости перемещения и диапазон скоростей могут управляться конфигурируемым образом, который допускает приспосабливание к конкретным требованиям разработчиками изделия и/или заказчиком. Например, конфигурация может определять низкую скорость в каждом направлении и/или высокую скорость в каждом направлении.
В другом примере единый многопозиционный орган 202 управления может быть выполнен таким образом, чтобы стол 120 пациента перемещался с одной скоростью в течение определенного периода времени, например, в течение 0,5 с, а затем отпускание единого многопозиционного органа 202 управления переключало бы стол 120 пациента в заданный режим толчковых перемещений, в котором стол пациента будет перемещаться скачками на заданные расстояния, например, по 0,5 мм.
Хотя на фиг. 2 показаны стрелки в качестве системы отсчета, в другом варианте реализации стрелки являются световыми компонентами, которые включаются, когда единый многопозиционный орган 202 управления сдвигается в одном из допустимых направлений. Например, все световые компоненты будут включены, когда единый многопозиционный орган 202 управления находится в исходной позиции или позиции покоя. Когда единый многопозиционный орган 202 управления сдвигается вверх, может загораться стрелка, указывающая направление перемещения вверх. Аналогичным образом работают стрелки, указывающие другие направления. Применительно к направлениям с несколькими скоростями, такими как направления влево и вправо (внутрь и наружу) в этом примере, число загорающихся стрелок может указывать конкретную скорость.
На фиг. 5-10 показаны альтернативные места установки пульта 122 управления перемещением стола пациента.
На фиг. 5 представлен вариант реализации, в котором вертикальная дорожка 502 установлена на передней стороне 106 неподвижного гентри 102, а пульт 122 управления перемещением стола пациента установлен по скользящей посадке на вертикальной дорожке 502. В этом варианте реализации пульт 122 управления перемещением стола пациента выполнен с возможностью скольжения вдоль вертикальной дорожки 502, занимая множество позиций. Пульт 122 управления перемещением стола пациента может удерживаться в любой конкретной позиции различными механизмами, такими как зажимной винт, защелка, стопор, подпружиненный рычаг или другими подобными механизмами. Это позволяет разным специалистам разного роста индивидуально располагать пульт 122 управления перемещением стола пациента для доступа. Пульт 122 управления перемещением стола пациента может устанавливаться на дорожку 502 через опоры скольжения, шариковые и/или другие опоры.
На фиг. 6 представлен вариант реализации, в котором пульт 122 управления перемещением стола пациента установлен на боковой стороне 108 неподвижного гентри 102. В этом варианте реализации единый многопозиционный орган 202 управления может быть расположен таким образом, чтобы физическое направление скольжения переключателя соответствовало направлению перемещения стола 120 пациента. В качестве примера в упомянутом выше варианте реализации единый многопозиционный орган 202 управления сдвигается влево и вправо, чтобы переместить стол 120 пациента внутрь и наружу из зоны 110 обследования. В этом варианте реализации единый многопозиционный орган 202 управления располагается таким образом, чтобы он скользил в направлении зоны 110 обследования для перемещения стола 120 пациента в зону 110 обследования, и в противоположном направлении, в сторону от зоны 110 обследования для извлечения стола 120 пациента из зоны 110 обследования.
На фиг. 7 представлен вариант реализации, в котором пульт 122 управления перемещением стола пациента смонтирован подвижно на кольцевой или кольцеобразной дорожке 702, которая смонтирована на неподвижном гентри 102 таким образом, что она окружает зону 110 обследования. Как и на фиг. 5, в этом варианте реализации оператор может различным образом регулировать относительное положение пульта 122 управления перемещением стола пациента на неподвижном гентри 102, добиваясь желаемого положения.
На фиг. 8 представлен вариант реализации, в котором система 100 включает в себя раздвижной или вдвижной рычаг 802, выполненный с возможностью физической и электронной поддержки пульта 122 управления перемещением стола пациента. Рычаг 802 может иметь первый элемент, шарнирно прикрепляемый к системе 100, и второй элемент, шарнирно прикрепляемый к первому элементу через локтевое звено, как показано. В другом варианте реализации рычаг 802 включает в себя больше или меньше элементов. Кроме того, каждый элемент может быть шарнирно прикреплен, как на фиг. 8, или же прикреплен с обеспечением заданного более ограниченного диапазона движений.
На фиг. 9 представлен вариант реализации, в котором пульт 122 управления перемещением стола пациента установлен таким образом, что он выступает из передней стороны 106 неподвижного гентри 102, а на фиг. 10 представлен вариант реализации, в котором пульт 122 управления столом пациента установлен в углублении 1002 передней стороны 106 неподвижного гентри 102. В обоих этих вариантах реализации оператор может класть свои руки на выступ и/или в выемку и/или на орган 202 управления. Это позволяет оператору свободно располагать свои руки в позиции, близкой к пульту 122 управления, когда он находится вблизи стола 120 пациента и либо не приводит сейчас в действие пульт 122 управления, либо собирается привести его в действие.
На фиг. 11 представлен вариант реализации, в котором пульт 122 управления перемещением стола пациента закреплен с возможностью поворота на передней стороне 106 неподвижного гентри 102. В представленном варианте реализации пульт 122 управления перемещением стола пациента поворачиваются вверх и вниз по отношению к передней стороне 106 неподвижного гентри 102. Дополнительно или альтернативно пульт 122 управления перемещением стола пациента может быть выполнены с возможностью поворота из стороны в сторону по отношению к передней стороне неподвижного гентри 102.
Вариант реализации на фиг. 12 подобен варианту реализации на фиг. 6 за исключением того, что пульт 122 управления перемещением стола пациента прикреплен с возможностью поворота к боковой стороне 108 неподвижного гентри 102. В этом случае пульт 122 управления может располагаться, как обсуждалось применительно к фиг. 6, таким образом, что смещение органа 202 управления в направлении зоны обследования заставляет стол 120 пациента перемещаться в зону обследования (и наоборот), или, как обсуждалось применительно к фиг. 1, таким образом, что смещение органа 202 управления влево или вправо заставляет стол 120 пациента перемещаться в зону обследования (и наоборот). Пульт 122 управления перемещением стола пациента может поворачиваться через эти положения.
На фиг. 13 представлен вариант реализации, в котором пульт 122 управления перемещением стола пациента съемно прикреплен к загрузочному узлу 1302 на неподвижном гентри 102. В этом варианте реализации пульт 122 управления перемещением стола пациента и система 100 включают в себя интерфейсы беспроводной связи, и пульт 122 управления перемещением стола пациента может обеспечивать беспроводное дистанционное управление перемещением стола 120 пациента.
На фиг. 14 представлен способ.
На этапе 1402 оператор использует единый многоосевой орган управления (например, орган 202), расположенный на системе формирования изображений, чтобы привести в действие различные наборы переключателей с целью обеспечения управляемого перемещения по вертикали, горизонтали и диагонали стола 120 пациента в системе 120 формирования изображений.
На этапе 1404 оператор использует единый многоосевой орган 202 управления, чтобы привести в действие различные наборы переключателей для обеспечения управления скоростью перемещения стола 120 пациента.
Упомянутое выше может быть реализовано посредством машиночитаемых команд, которые при исполнении их процессором (процессорами) компьютера заставляют процессор(ы) выполнять предписанные действия. В таком случае команды запоминаются в машиночитаемом носителе информации, связанном или другим образом доступном для соответствующего компьютера.
На фиг. 15 и 16 представлен другой вариант реализации пульта 118 управления. На фиг. 15 пульт 118 управления включают в себя восьмипозиционный кулисный переключатель 1502 или ему подобный, который управляет направлением перемещения, и по меньшей мере один переключатель 1504, такой как два переключателя 1504, который активирует высокую (или низкую) скорость для соответствующего по меньшей мере одного из направлений перемещения. Фиг. 16 подобна фиг. 15 за исключением того, что она включает в себя переключатель 1504 для каждого из направлений перемещения. Применительно к одному или обоим из фиг. 15 или 16 переключатель (переключатели) 1504 располагается прилегающим к соответствующему направлению перемещения на кулисном переключателе 1502. Поэтому оператор может использовать всего лишь один палец руки, чтобы активизировать и направление перемещения, и скорость. Конечно, оператор может использовать более чем один палец и/или другой инструмент, и/или же активизировать перемещение, не приводя в действие переключатель высокой (или низкой) скорости. В других вариантах реализации переключатель (переключатели) располагается где-то еще по отношению к кулисному переключателю 1502.
Изобретение было описано здесь со ссылкой на различные варианты реализации. Модификации и изменения могут быть сделаны по прочтении содержащегося здесь описания. Подразумевается, что изобретение трактуется как включающее в себя такие модификации и изменения в той мере, в какой они укладываются в объем прилагаемых пунктов формулы изобретения или их эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДСТАВКА ДЛЯ СУБЪЕКТА ОБСЛЕДОВАНИЯ В СИСТЕМЕ ФОРМИРОВНИЯ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2606586C2 |
| ИДЕНТИФИКАТОР ПОЛОЖЕНИЯ НАЧАЛА И/ИЛИ КОНЦА СКАНИРОВАНИЯ | 2011 |
|
RU2570958C2 |
| СОВМЕЩЕНИЕ ДАННЫХ ИЗОБРАЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОЙ ПЕРФУЗИОННОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2011 |
|
RU2582055C2 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ СИСТЕМ РАДИАЦИОННОЙ ТЕРАПИИ | 2004 |
|
RU2342172C2 |
| ФОРМИРОВАНИЕ СПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2575392C2 |
| МНОГОМОДУЛЬНАЯ КОМПАКТНАЯ ТУННЕЛЬНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2596010C2 |
| КОЛЛИМАТОР ДЛЯ СКВОЗНОГО СКАНИРОВАНИЯ | 2008 |
|
RU2499559C2 |
| ФОРМИРОВАНИЕ СПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2597073C2 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ОТНОШЕНИЯ КОНТРАСТ-ШУМ (К/Ш) | 2011 |
|
RU2598334C2 |
| СНИЖЕНИЕ НАРУШЕНИЯ ВЫРАВНИВАНИЯ ПОД УПРАВЛЕНИЕМ ПРОЦЕССОРА ИЗОБРАЖЕНИЙ ДЛЯ ОФТАЛЬМОЛОГИЧЕСКИХ СИСТЕМ | 2012 |
|
RU2593745C2 |




Изобретение относится к медицинской технике, а именно к средствам, применяемым в компьютерной томографии. Система формирования изображений содержит неподвижный гентри, стол пациента, выполненный с возможностью расположения объекта или субъекта на нем в зоне обследования, и пульт управления перемещением стола пациента, прикрепленный к неподвижному гентри, и включающий единый многопозиционный орган управления перемещением стола пациента по горизонтали, вертикали и диагонали внутри и снаружи зоны обследования. Способ управления перемещением включает этап управления перемещением по вертикали, горизонтали и диагонали стола пациента посредством единого многопозиционного органа управления, расположенного на системе формирования изображений. Использование изобретения позволяет упростить конфигурацию управления. 2 н. и 13 з.п. ф-лы, 16 ил.

1. Система (100) формирования изображений, которая содержит:
неподвижный гентри (102), имеющий переднюю сторону (106) и зону (110) обследования;
стол (120) пациента, выполненный с возможностью расположения объекта или субъекта на нем в зоне (110) обследования; и
пульт (122) управления перемещением стола пациента, прикрепленный к неподвижному гентри (102) и включающий в себя единый многопозиционный орган (202) управления, который управляет перемещением стола (120) пациента по горизонтали, вертикали и диагонали внутри и снаружи зоны (110) обследования.
2. Система по п. 1, в которой единый многопозиционный орган (202) управления управляет по меньшей мере двумя ненулевыми скоростями перемещения стола (120) пациента.
3. Система по любому из пп. 1-2, в которой единый многопозиционный орган (202) управления включает в себя ползунковый переключатель, который скользит по каналу для приведения в действие набора переключателей для инициации желаемого перемещения стола (120) пациента.
4. Система по п. 1 или 2, в которой единый орган (202) управления включает в себя по меньшей мере либо шарнирный джойстик, который поворачивается для инициации желаемого перемещения стола (12 0) пациента, либо поворотный переключатель, который поворачивается для инициации желаемого перемещения стола (120) пациента.
5. Система по п. 1 или 2, в которой единый орган (202) управления включает в себя кулисный переключатель (1502), который управляет направлением перемещения, и по меньшей мере один другой переключатель (1504), который вводит в действие вторую скорость перемещения.
6. Система по п. 1 или 2, в которой единый орган (202) управления передвигается в восьми разных направлениях для управления как восемью направлениями перемещения, так и по меньшей мере одним из: ненулевой скоростью, несколькими дискретными скоростями, или переменной скоростью.
7. Система по п. 1 или 2, в которой пульт (122) управления перемещением стола пациента обеспечивает обратную связь, указывающую допустимое перемещение.
8. Система по п. 1 или 2, в которой пульт (122) управления перемещением стола пациента установлен на передней стороне (106) неподвижного гентри (102).
9. Система по п. 8, в которой пульт (122) управления перемещением стола пациента выступает из передней стороны (106).
10. Система по п. 8, в которой пульт (122) управления перемещением стола пациента закреплен в углублении (1002) на передней стороне (106).
11. Система по п. 1 или 2, которая дополнительно содержит: вертикальную дорожку (502), закрепленную на передней стороне (106), при этом пульт (122) управления перемещением стола пациента установлен в скользящей посадке на эту дорожку (502) и передвигается по меньшей мере между двумя разными позициями по вертикали.
12. Система по п. 1 или 2, которая дополнительно содержит кольцеобразную дорожку (702), закрепленную на передней стороне (106) и окружающую зону (110) обследования, при этом пульт (122) управления перемещением стола пациента установлен в скользящей посадке на эту дорожку и передвигается по меньшей мере двумя позициями вдоль дорожки (702).
13. Система по п. 1 или 2, которая дополнительно содержит раздвижной/вдвижной рычаг (802), прикрепленный к неподвижному гентри (102), при этом пульт (122) управления перемещением стола пациента прикреплен к раздвижному/вдвижному рычагу (802) и движется вместе с ним.
14. Система по п. 1 или 2, в которой пульт (122) управления перемещением стола пациента прикреплен к передней стороне (106) с возможностью поворота.
15. Способ управления перемещением в системе формирования изображений, содержащий этап, на котором:
управляют перемещением по вертикали, горизонтали и диагонали стола (120) пациента в системе (100) формирования изображений посредством единого многопозиционного органа (202) управления, расположенного на системе (100) формирования изображений.
| US 6023799 A, 15.02.2000 | |||
| US 6522713 B1, 18.02.2003 | |||
| DE 4224246 C1, 19.08.1993 | |||
| WO 2009114366 A2, 17.09.2009 | |||
| US 2003069653 A1, 10.04.2003 | |||
| US 2009022275 A1, 22.01.2009 | |||
| СПОСОБ ФОРМИРОВАНИЯ ДОЗНЫХ ПОЛЕЙ ПРИ ЛУЧЕВОЙ ТЕРАПИИ | 1992 |
|
RU2101048C1 |

