ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
По настоящей заявке испрашивается приоритет согласно 35 U.S.C. §119 на основании заявки на патент США № 13/098,586, поданной 2 мая 2011 г., содержание которой в полном объеме включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящий патентный документ относится к системам и техническим средствам для офтальмологического формирования изображения. В частности, настоящий патентный документ относится к системам и способам для обеспечения управляемого электронным способом света фиксации для повышения точности выравнивания или привязки офтальмологической системы формирования изображения с глазом/к глазу пациента.
УРОВЕНЬ ТЕХНИКИ
В течение ряда лет были разработаны различные передовые устройства формирования изображения для формирования изображения, диагностики и хирургии в области офтальмологии. Для некоторых применений, эти устройства формирования изображения лучше всего работают, когда их оптическая ось выровнена с оптической осью изображаемого глаза. Когда оптическая ось глаза выровнена с оптической осью устройства формирования изображения, некоторые устройства формирования изображения повышают точность процесса формирования изображения за счет обездвиживания глаза в выровненной позиции с помощью интерфейса пациента или системы привязки глаза. С повышением точности устройств формирования изображения, также возрастает потребность в системах привязки глаза, которые обеспечивают более точное выравнивание.
В типичных существующих системах выравнивание регулируется вручную. Оператор может отдавать распоряжение пациенту вербально, вручную ориентировать глазное яблоко или регулировать участки устройства формирования изображения, например, его объектива или гентри, или комбинируя любые вышеупомянутые варианты. Эти регулировки осуществляются итерационно в ходе процесса привязки. Однако неточность этих ручных подходов может делать процесс привязки весьма затратным по времени и нецелесообразным и все же не позволяет добиться высококачественного выравнивания. Ввиду ограниченной точности регулируемого вручную выравнивания, интерфейс пациента часто оказывается привязанным к глазу в позиции, смещенной относительно центра, оптическая ось глаза наклоняется, и глаз неверно размещается в поперечном направлении относительно оптической оси системы формирования изображения.
В некоторых системах формирования изображения используются механизмы руководства, перспективные в плане усовершенствования процесса выравнивания. В некоторых системах, например в некоторых хирургических системах, где используются эксимерные лазеры, выравнивание осуществляется с помощью света фиксации. Свет фиксации можно центрировать с оптической осью системы формирования изображения. Пациент может получать инструкцию приучать свой глаз к свету фиксации. Эта фиксация может выравнивать глаз пациента с системой формирования изображения. Однако даже эти системы света фиксации имеют ограничения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В настоящем патентном документе раскрыты системы управления светом фиксации с улучшенными функциональными возможностями. Глаз пациентов обычно имеет поперечное и угловое нарушение выравнивания относительно системы формирования изображения. Простое смотрение на фиксированный свет фиксации, центрированный с оптической осью устройства формирования изображения, не исключает оба типа нарушений выравнивания.
Таким образом, в некоторых системах, включающих в себя некоторые лазеры на АИГ и щелевые лампы, свет фиксации не фиксируется и может регулироваться вручную или механически. Однако поскольку регулировка является только механической/ручной, точность этих световых излучений фиксации значительно ниже точности систем формирования изображения. Кроме того, такие механические регулировки могут быть весьма затратными по времени и нецелесообразными вследствие их ограниченной точности.
Наконец, в некоторых системах светом фиксации можно управлять отчасти вручную и отчасти электронным способом. Ручные операции, выполняемые опытными хирургами, могут улучшить выравнивание, в других случаях такая система может страдать недостатком точности.
В настоящем патентном документе раскрыты системы управления светом фиксации, которые обеспечивают решения вышеописанных проблем. В некоторых реализациях офтальмологическая система может включать в себя офтальмологическое устройство формирования изображения, выполненное с возможностью формирования изображения участка изображаемого глаза пациента, процессор изображений, выполненный с возможностью определения нарушения выравнивания изображаемого глаза и устройства формирования изображения посредством обработки формируемого изображения, и формирования сигнала управления согласно определенному нарушению выравнивания, и систему снижения нарушения выравнивания, выполненную с возможностью приема сигнала управления и формирования ответа снижения нарушения выравнивания.
В некоторых реализациях офтальмологическое устройство формирования изображения может включать в себя электронную систему обнаружения, которая обнаруживает собранный свет формирования изображения из изображаемого глаза, включающую в себя по меньшей мере одну из матрицы приборов с зарядовой связью (ПЗС), матрицы комплементарных структур металл-оксид-полупроводник (КМОП), пиксельной матрицы и матрицы электронных датчиков, и электронную систему отображения, которая отображает изображение участка изображаемого глаза в связи с обнаруженным собранным светом формирования изображения, включающую в себя по меньшей мере один из светодиодного (СИД) дисплея, плазменного экрана, электронного дисплея, компьютерного дисплея, экрана жидкокристаллического дисплея (ЖКД), дисплея на основе электронно-лучевой трубки (ЭЛТ), видео-модуля, дисплея видеомикроскопа, стереоскопического дисплея видеомикроскопа, видеомикроскопа высокой четкости (HD), процессорной системы обработки изображений, оптомеханического проектора электронного или цифрового типа и источника света, приводимого в движение электромеханическим приводом.
В некоторых реализациях процессор изображений выполнен с возможностью идентификации офтальмической структуры в изображении и для определения меры нарушения выравнивания путем определения положения офтальмической структуры относительно опорной точки устройства формирования изображения. В некоторых реализациях процессор изображений выполнен с возможностью идентификации офтальмической структуры путем определения линии высокого градиента в изображении, разделяющей элементы изображения, существенно отличающиеся яркостью или цветом.
В некоторых реализациях процессор изображений выполнен с возможностью подбора по меньшей мере одного из круга и эллипса к линии высокого градиента путем измерения радиальных расстояний между линией высокого градиента и кругом или эллипсом, определения координаты положения подобранного круга или эллипса путем минимизации меры радиальных расстояний, и определения меры нарушения выравнивания путем сравнения определенной координаты положения и координаты опорной точки. В некоторых реализациях процессор изображений выполнен с возможностью определения линии высокой контрастности в изображении, для определения расстояний нарушения выравнивания между линией высокой контрастности и прицельным шаблоном, и определения меры нарушения выравнивания из расстояний нарушения выравнивания.
В некоторых реализациях опорной точкой устройства формирования изображения является по меньшей мере один из объектива, модуля пациента, наконечника привязки, интерфейса, контактной линзы, зрачка, смотровой рамки, системы координат и внутренней линзы офтальмологической системы, и устройство формирования изображения выполнено с возможностью формирования опорного шаблона, связанного с опорной точкой, для помощи процессору изображений в определении нарушения выравнивания изображаемого глаза и устройства формирования изображения. В некоторых реализациях распознанной офтальмической структурой является лимб изображаемого глаза. В некоторых реализациях по меньшей мере часть изображения, обработанного процессором изображений, не отображается устройством формирования изображения.
В некоторых реализациях система снижения нарушения выравнивания может включать в себя источник света фиксации, и ответ снижения нарушения выравнивания содержит источник света фиксации, формирующий свет фиксации в ответ на принятый сигнал управления. В некоторых реализациях источник света фиксации выполнен с возможностью формирования света фиксации для не изображаемого глаза пациента, и перемещения формируемого света фиксации согласно принятому сигналу управления для способствования снижению нарушения выравнивания между изображаемым глазом и опорным компонентом офтальмологической системы. В некоторых реализациях источник света фиксации может включать в себя по меньшей мере один из матрицы СИД, плазменного экрана, электронного дисплея, компьютерного дисплея, экрана ЖКД, видео-модуля, оптомеханического проектора электронного или цифрового типа, ЭЛТ-дисплея, щелевой лампы, процессорной системы обработки изображений и источника света, приводимого в движение электромеханическим приводом. В некоторых реализациях источник света фиксации выполнен с возможностью формирования света фиксации для руководства пациентом в снижении углового нарушения выравнивания.
В некоторых реализациях процессор изображений выполнен с возможностью определения углового нарушения выравнивания путем подбора эллипса к линии высокой контрастности изображения и анализа по меньшей мере одного из аспектного отношения и площади подобранного эллипса. В некоторых реализациях источник света фиксации может включать в себя коллиматор для формирования света фиксации для руководства пациентом в снижении поперечного нарушения выравнивания.
В некоторых реализациях система снижения нарушения выравнивания может включать в себя гентри, выполненное с возможностью перемещения подвижной части устройства формирования изображения, и контроллер гентри, выполненный с возможностью приема сигнала управления от процессора изображений, и перемещения гентри согласно принятому сигналу управления, и ответ снижения нарушения выравнивания может включать в себя контроллер гентри, перемещающий гентри и, таким образом, подвижную часть устройства формирования изображения для снижения поперечного нарушения выравнивания. В некоторых реализациях гентри также является частью офтальмологического устройства формирования изображения. В некоторых реализациях система снижения нарушения выравнивания может включать в себя гентри опоры, выполненное с возможностью перемещения опоры пациента относительно устройства формирования изображения, и контроллер гентри, выполненный с возможностью приема сигнала управления от процессора изображений, и перемещения гентри опоры согласно принятому сигналу управления, и ответ снижения нарушения выравнивания может включать в себя контроллер гентри, перемещающий гентри опоры и, таким образом, опору пациента для снижения поперечного нарушения выравнивания.
В некоторых реализациях процессор изображений выполнен с возможностью определения углового и поперечного нарушения выравнивания посредством обработки изображения, и система снижения нарушения выравнивания может включать в себя только один из источника света фиксации и контроллера гентри.
В некоторых реализациях процессор изображений выполнен с возможностью определения углового и поперечного нарушения выравнивания посредством обработки изображения, и система снижения нарушения выравнивания может включать в себя источник света фиксации, гентри и контроллер гентри. В некоторых реализациях процессор изображений выполнен с возможностью определения углового и поперечного нарушения выравнивания посредством обработки изображения и информации нарушения выравнивания.
В некоторых реализациях система формирования изображения может включать в себя источник света локатора, выполненный с возможностью проецирования света локатора на изображаемый глаз, и процессор изображений выполнен с возможностью идентификации апикального отраженного света локатора в изображении, формируемом устройством формирования изображения, и определения информации нарушения выравнивания посредством анализа апикального отраженного света локатора. В некоторых реализациях информация нарушения выравнивания является по меньшей мере одной из информации углового нарушения выравнивания, связанной с вектором в изображении между апикальным отраженным светом локатора и положением изображаемой офтальмической структуры, и информации поперечного нарушения выравнивания, связанной с вектором в изображении между опорной точкой системы формирования изображения и по меньшей мере одним из апикального отраженного света локатора и положения изображаемой офтальмической структуры.
В некоторых реализациях офтальмологическая система выполнена с возможностью снижения углового нарушения выравнивания путем регулировки источника света фиксации, и снижения поперечного нарушения выравнивания с помощью контроллера гентри. В некоторых реализациях свет фиксации можно регулировать так, чтобы свет локатора и положение изображаемой офтальмической структуры можно было выравнивать путем регулировки света фиксации. В некоторых реализациях источник света фиксации и источник света локатора способны работать на разных длинах волны. В некоторых реализациях свет локатора невидим для изображаемого глаза.
В некоторых реализациях интерфейс пациента выполнен с возможностью привязки к изображаемому глазу пациента после того, как система снижения нарушения выравнивания выполнит ответ снижения нарушения выравнивания. В некоторых реализациях система снижения нарушения выравнивания может включать в себя источник света фиксации, выполненный с возможностью формирования света фиксации для изображаемого глаза пациента, и регулировки формируемого света фиксации согласно принятому сигналу управления для способствования снижению нарушения выравнивания между изображаемым глазом и опорным компонентом офтальмологической системы. Некоторые реализации включают в себя свет локатора, фокусируемый во вторую фокальную точку, отличную от первой фокальной точки света фиксации.
В некоторых реализациях способ выравнивания глаза с офтальмологической системой может включать в себя этапы, на которых формируют изображение участка изображаемого глаза пациента с помощью офтальмологического устройства формирования изображения, определяют нарушение выравнивания изображаемого глаза и устройства формирования изображения с помощью процессора изображений, обрабатывающего формируемое изображение, и формируют ответ снижения нарушения выравнивания электронным способом с помощью системы снижения нарушения выравнивания на основании определенного нарушения выравнивания.
В некоторых реализациях определение нарушения выравнивания может включать в себя этапы, на которых идентифицируют офтальмическую структуру в изображении, и определяют положение офтальмической структуры относительно опорной точки устройства формирования изображения. В некоторых реализациях формирование ответа снижения нарушения выравнивания может включать в себя этап, на котором формируют свет фиксации с помощью источника света фиксации согласно определенному нарушению выравнивания.
В некоторых реализациях формирование света фиксации может включать в себя этап, на котором формируют свет фиксации для руководства пациентом в снижении углового нарушения выравнивания. В некоторых реализациях формирование света фиксации может включать в себя этап, на котором формируют свет фиксации для руководства пациентом в снижении поперечного нарушения выравнивания, причем источник света фиксации может включать в себя коллиматор.
В некоторых реализациях формирование света фиксации может включать в себя этап, на котором формируют свет фиксации для не изображаемого глаза пациента, и формирование ответа снижения нарушения выравнивания может включать в себя этап, на котором регулируют свет фиксации согласно определенному нарушению выравнивания для помощи пациенту в снижении нарушения выравнивания. В некоторых реализациях формирование света фиксации может включать в себя этап, на котором формируют свет фиксации для изображаемого глаза пациента, и формирование ответа снижения нарушения выравнивания может включать в себя этап, на котором регулируют свет фиксации согласно определенному нарушению выравнивания для помощи пациенту в снижении нарушения выравнивания.
В некоторых реализациях формирование ответа снижения нарушения выравнивания может включать в себя этап, на котором перемещают гентри системы формирования изображения с помощью контроллера гентри для снижения поперечного нарушения выравнивания.
В некоторых реализациях определение нарушения выравнивания может включать в себя этап, на котором определяют угловое и поперечное нарушение выравнивания с помощью процессора изображений, обрабатывающего изображение и информацию нарушения выравнивания, и формирование ответа снижения нарушения выравнивания может включать в себя этап, на котором регулируют свет фиксации системы света фиксации и контроллера гентри. В некоторых реализациях определение нарушения выравнивания может включать в себя этапы, на которых проецируют свет локатора на изображаемый глаз с помощью системы света локатора, определяют положение апикального отраженного света локатора в изображении, формируемом устройством формирования изображения, и определяют информацию нарушения выравнивания с использованием определенного положения апикального отраженного света локатора. В некоторых реализациях определение информации нарушения выравнивания может включать в себя этапы, на которых определяют информацию углового нарушения выравнивания, связанную с вектором в изображении между апикальным отраженным светом локатора и положением изображаемой офтальмической структуры, и определяют информацию поперечного нарушения выравнивания, связанную с вектором в изображении между опорной точкой системы формирования изображения и по меньшей мере одним из апикального отраженного света локатора и изображаемой офтальмической структурой.
В некоторых реализациях формирование ответа снижения нарушения выравнивания может включать в себя этапы, на которых снижают угловое нарушение выравнивания путем регулировки света фиксации, и снижают поперечное нарушение выравнивания с помощью контроллера гентри. В некоторых реализациях снижение углового нарушение выравнивания и снижение поперечного нарушения выравнивания повторяются итерационно. В некоторых реализациях формирование ответа снижения нарушения выравнивания может включать в себя этапы, на которых проецируют свет фиксации в изображаемый глаз, и снижают поперечное и угловое нарушение выравнивания, перемещая голову пациента в поперечном направлении для выравнивания света локатора и света фиксации.
В некоторых реализациях офтальмологическая система может включать в себя устройство формирования изображения, которое формирует изображение изображаемого глаза пациента, процессор изображений, который определяет угловое и поперечное нарушение выравнивания изображаемого глаза и устройства формирования изображения посредством обработки формируемого изображения, систему света фиксации, которая проецирует свет фиксации на глаз пациента для способствования снижению углового нарушения выравнивания, и гентри, которое регулирует подвижный оптический узел системы для снижения поперечного нарушения выравнивания. В некоторых реализациях офтальмологическая система может включать в себя систему света индикатора, которая проецирует свет индикатора на изображаемый глаз для обеспечения информации нарушения выравнивания для процессора изображений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует глаз.
Фиг. 2 иллюстрирует офтальмологическую систему формирования изображения.
Фиг. 3A-C иллюстрируют нарушения выравнивания глаза.
Фиг. 4 иллюстрирует офтальмологическую систему с системой снижения нарушения выравнивания.
Фиг. 5A-E иллюстрируют систему обработки изображений.
Фиг. 6A-B иллюстрируют систему света фиксации.
Фиг. 7A-C иллюстрируют способ снижения нарушения выравнивания.
Фиг. 8A-B иллюстрируют снижение нарушения выравнивания с помощью света фиксации.
Фиг. 9A-B иллюстрирует способ обработки изображений для определения углового нарушения выравнивания.
Фиг. 10A-B иллюстрируют систему коллимированного света фиксации.
Фиг. 11 иллюстрирует систему снижения нарушения выравнивания с гентри.
Фиг. 12A-B иллюстрируют работу системы гентри.
Фиг. 13 иллюстрирует систему гентри ложа.
Фиг. 14 иллюстрирует систему, объединяющую свет фиксации и гентри.
Фиг. 15A-B иллюстрируют работу системы объединенных света фиксации и гентри.
Фиг. 16A-B иллюстрируют систему со светом локатора.
Фиг. 17A-B иллюстрируют систему света локатора, обрабатывающую угловое и поперечное нарушение выравнивания.
Фиг. 18 иллюстрирует снижение поперечного и углового нарушения выравнивания.
Фиг. 19A-B иллюстрируют систему света фиксации, проецирующий свет фиксации в изображаемый глаз пациента.
Фиг. 20A-B иллюстрируют систему с двумя световыми излучениями фиксации.
Фиг. 21 иллюстрирует систему с дополнительной системой формирования изображения ОКТ.
Фиг. 22 иллюстрирует способ эксплуатации офтальмологической системы с системой снижения нарушения выравнивания.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Реализации и варианты осуществления в настоящем патентном документе обеспечивают систему света фиксации для офтальмологических устройств формирования изображения для повышения точности выравнивания изображаемого глаза и устройства формирования изображения.
Фиг. 1 подробно иллюстрирует человеческий глаз 1. Глаз 1 включает в себя роговицу 2, которая принимает и преломляет входящий свет, радужную оболочку 3, зрачок 4, в сущности, отверстие, через который свет поступает во внутренний глаз, и хрусталик 5, который фокусирует свет на сетчатке. Кроме того, глаз 1 включает в себя лимб 6, образующий границу между окрашенной радужной оболочкой 3 и белой склерой 7.
Фиг. 2 иллюстрирует офтальмологическую систему 10 формирования изображения и ее работу. Пациента 8 можно уложить на поддерживающее ложе. Источник 11 света формирования изображения может излучать свет формирования изображения на изображаемый глаз 1i. Часть света формирования изображения, отраженного изображаемым глазом 1i, может собираться объективом 12 и направляться в качестве собранного света 13 формирования изображения на оптический узел или оптическую систему 14. Оптический узел 14 может направлять собранный свет 13 формирования изображения на модуль 15 формирования изображения. Профессиональный хирург или медик может анализировать изображение, обеспеченное модулем 15 формирования изображения и давать инструкции пациенту для перемещения изображаемого глаза 1i для улучшения его выравнивания с оптической осью системы 10 формирования изображения. В других случаях, хирург может вручную манипулировать изображаемым глазом 1i для улучшения выравнивания. Эти этапы можно осуществлять на практике для подготовки изображаемого глаза 1i для привязки к нему интерфейса пациента или просто для лучшего выравнивания глаза с системой 10 формирования изображения. Интерфейсы пациента можно использовать либо для помощи в формировании изображения глаза 1i, либо для осуществления офтальмологической хирургической операции. В других системах, бесконтактная процедура формирования изображения может осуществляться после выравнивания. В прочих системах, выравнивание может сопровождаться диагностической процедурой. В любой из вышеописанных систем офтальмологическая система 10 формирования изображения предоставляет хирургу только изображение ограниченной точности, поскольку выравнивание с глазом является только приблизительным.
Фиг. 3A-B иллюстрируют, что после использования такой офтальмологической системы 10 формирования изображения ограниченной точности, может сохраняться остаточное нарушение выравнивания между глазом 1 и офтальмологической системой 10 формирования изображения. В частности, дальним концом 20 офтальмологической системы 10 может быть объектив 12 или контактный модуль, блок привязки, дальний наконечник, интерфейс, или модуль уплощения. В любой из этих конструкций, дальний конец 20 может включать в себя корпус 21, который поддерживает дальнюю линзу 22. Оптическая ось 28 офтальмологической системы 10 формирования изображения, обычно совмещенная с оптической осью дальней линзы 22, может оставаться невыровненной с оптической осью 9 глаза 1 даже после осуществления вышеописанной процедуры привязки ограниченной точности.
Фиг. 3A иллюстрирует, что нарушение выравнивания может быть поперечным нарушением выравнивания, характеризующимся вектором (∆x,∆y) между оптической осью 9 глаза и оптической осью 28 системы 10 формирования изображения, лежащей приблизительно в поперечной плоскости, перпендикулярной оптической оси 28.
Фиг. 3B иллюстрирует, что нарушение выравнивания также может быть угловым нарушением выравнивания. В общем случае, угловое нарушение выравнивания может характеризоваться углами Эйлера (θ,φ) между оптической осью 9 глаза и оптической осью 28 системы 10 формирования изображения. Во многих случаях, нарушение выравнивания может быть комбинацией поперечного и углового нарушения выравнивания.
Фиг. 3C иллюстрирует, что на интерфейсе формирования изображения модуля 15 формирования изображения любое нарушение выравнивания может возникать вследствие смещения радужной оболочки 3 и зрачка 4 относительно прицельного шаблона 17, например прицельного круга. Хирург может давать пациенту вербальные инструкции для перемещения изображаемого глаза 1i, или манипулировать глазом 1i вручную на основании его отображаемого смещения.
Однако словесные инструкции могут быть непонятны уже дезориентированному пациенту, и манипулирование глазом может быть утомительным и неточным. Также пациент с большой степенью вероятности может сопротивляться действиям хирурга или специалиста или отменить их.
Некоторые офтальмологические системы могут использовать свет фиксации для обеспечения руководства для пациента. Однако устройства света фиксации все же имеют рассмотренные выше недостатки. Некоторые устройства обеспечивают регулируемые световые излучения фиксации в порядке усовершенствования. Однако, даже в таких системах, положение света фиксации обычно регулируется вручную или механически, по-прежнему приводя к ограниченной точности процесса регулировки.
Фиг. 4 иллюстрирует офтальмологическую систему 100 формирования изображения, которую можно использовать для выравнивания изображаемого глаза 1i и офтальмологической системы 100 с повышенной точностью. Офтальмологическая система 100 может включать в себя офтальмологическое устройство 110 формирования изображения, процессор 120 изображений и систему 130 снижения нарушения выравнивания. Офтальмологическое устройство 110 формирования изображения может быть выполнено с возможностью формирования изображения участка изображаемого глаза пациента. Процессор 120 изображений может быть выполнен с возможностью определения нарушения выравнивания изображаемого глаза и устройства формирования изображения посредством обработки формируемого изображения, и формирования сигнала управления согласно определенному нарушению выравнивания. Система 130 снижения нарушения выравнивания может быть выполнена с возможностью приема сигнала управления и формирования ответа снижения нарушения выравнивания.
Офтальмологическое устройство 110 формирования изображения может включать в себя источник 111 света формирования изображения, который обеспечивает свет формирования изображения для изображаемого глаза 1i. Источник 111 света формирования изображения может быть единичным источником света, кольцом из, например, 4, 6 или 8 источников света, или источником света в форме непрерывного кольца. Объектив 112 может собирать часть света формирования изображения, возвращаемого изображаемым глазом 1i, и направлять его в качестве собранного света 113 формирования изображения на оптический узел 114. Оптический узел 114 может направлять собранный свет 113 формирования изображения на модуль 115 формирования изображения. В общем случае, оптический узел 114 может быть весьма сложным, включая в себя большое количество линз и зеркал. Оптический узел 114 также может многофункциональным, например, также выполненным с возможностью направления пучка хирургического лазера на изображаемый глаз 1i. Модуль 115 формирования изображения может обеспечивать изображение для оператора системы 100 формирования изображения через интерфейс формирования изображения.
В некоторых реализациях офтальмологическое устройство 110 формирования изображения может включать в себя микроскоп, офтальмологический микроскоп или стереомикроскоп. Интерфейс формирования изображения этих микроскопов может включать в себя окуляр этих микроскопов.
В некоторых реализациях офтальмологическое устройство 110 формирования изображения может формировать изображение по меньшей мере частично, электронными средствами. Например, модуль 115 формирования изображения офтальмологического устройства 110 формирования изображения может включать в себя электронную систему обнаружения, которая обнаруживает собранный свет 113 формирования изображения. Электронная система обнаружения может включать в себя матрицу приборов с зарядовой связью (ПЗС), матрицу комплементарных структур металл-оксид-полупроводник (КМОП), пиксельную матрицу или матрицу электронных датчиков для обнаружения собранного света 113 формирования изображения.
В этих электронных системах формирования изображения модуль 115 формирования изображения также может включать в себя электронную систему отображения в качестве интерфейса формирования изображения. Этот электронный дисплей может отображать электронное изображение участка изображаемого глаза 1i на основании обнаруживаемого света 113. Этот электронный дисплей или интерфейс формирования изображения может представлять собой, например, светодиодный (СИД) дисплей, дисплей на органических СИД (ОСИД), дисплей на активно-матричных ОСИД (АМОСИД), плазменный экран, электронный дисплей, компьютерный дисплей, экран жидкокристаллического дисплея (ЖКД), дисплей на основе электронно-лучевой трубки (ЭЛТ), видео-модуль, дисплей видеомикроскопа, стереоскопический дисплей видеомикроскопа, видеомикроскоп высокой четкости (HD), процессорную систему обработки изображений, оптомеханический проектор электронного или цифрового типа, или источник света, приводимый в движение электромеханическим приводом. В некоторых реализациях вышеупомянутые элементы систем формирования изображения можно комбинировать.
В некоторых реализациях офтальмологическое устройство 110 формирования изображения может включать в себя систему формирования изображения на основе оптической когерентной томографии (ОКТ), как описано в связи с фиг. 21.
В некоторых реализациях система 130 снижения нарушения выравнивания может включать в себя объектив 112, на других участках оптического узла 114.
Процессор 120 изображений может быть выполнен с возможностью идентификации офтальмической структуры в изображении, формируемый устройством 110 формирования изображения, и определения положения офтальмической структуры относительно опорной точки устройства формирования изображения. Опорной точкой устройства формирования изображения может быть объектив 112, модуль пациента, наконечник привязки, интерфейс, контактная линза, зрачок, смотровая рамка, система координат и внутренняя линза офтальмологической системы. Модуль 115 формирования изображения может быть выполнен с возможностью формирования опорного шаблона, связанного с опорной точкой, для помощи процессору изображений в определении нарушения выравнивания изображаемого глаза и устройства формирования изображения. Таким опорным шаблоном может быть прицельный круг, аналогичный прицельному шаблону 17. Другие опорные шаблоны могут включать в себя перекрестия, множественные круги и их комбинации.
Процессор 120 изображений может быть выполнен с возможностью распознавания лимба 6 как офтальмической структуры. Обработка изображений также могут базироваться на зрачке 4, но часто лимб 6 образует более правильный круг и, таким образом, хорошо подходит для обработки изображений.
Фиг. 5A-E иллюстрируют, что в ходе эксплуатации, процессор 120 изображений может сначала идентифицировать одну или более офтальмических структур изображаемого глаза 1i например анализируя контрастность или градиент близлежащих пикселей изображения.
Фиг. 5A иллюстрирует, что процессор 120 изображений может осуществлять радиальное сканирование изображения и записывать яркость, цвет или оба эти параметра пикселей в направлении сканирования. Центр радиального сканирования можно выбирать по-разному. Также можно использовать нерадиальные операции сканирования, например, круговое, линейное, прямоугольное, сетчатое, 2D и многие другие типы операций сканирования.
Затем процессор 120 изображений может идентифицировать пиксель 121 высокого градиента или высокой контрастности в направлении сканирования как пиксель, где записанная/ый яркость или цвет изменяется быстрее всего. Линию 122 высокой контрастности или высокого градиента можно задать, соединив пиксели высокого градиента/высокой контрастности близлежащих операций сканирования. Такая линия высокого градиента/высокой контрастности может разделять офтальмические области, сильно отличающиеся яркостью или цветом, и таким образом может быть полезным индикатором офтальмических структур, например, лимба 6 или зрачка 4. В технике известны многочисленные другие способы машинного зрения и обработки изображений для определения структур и их границ, которые можно использовать вместо вышеописанного способа высокого градиента/высокой контрастности.
Фиг. 5B иллюстрирует, что затем процессор 120 изображений может подбирать пробные функции, например, круги 124 или эллипсы подбора к идентифицированным линиям высокого градиента/высокой контрастности для идентификации круглых офтальмических структур, например, лимба 6 или зрачка 4. Подбор может принимать разнообразные формы. В ряде случаев, центр и радиус круга 124 подбора можно перемещать так, чтобы круг подбора накладывался на линию высокого градиента/высокой контрастности с наивысшей точностью. Точность можно количественно выразить, например, задав величину среднего радиального расстояния ∆ как квадратный корень из средней величины квадратов радиальных расстояний между кругом 124 подбора и линией 122 высокого градиента/высокой контрастности вдоль заранее установленного количества лучей, например, 4, 6 или 8 лучей. Эта величина среднего радиального расстояния Δ может изменяться при перемещении в окрестности координат (Cx, Cy) центра круга 124 подбора под управлением поискового алгоритма. В данном случае, система координат (x, y) может быть привязана, например, к системе отсчета интерфейса модуля 115 формирования изображения. Фиг. 5B иллюстрирует 4-лучевую реализацию, где среднее радиальное расстояние определяется как
Δ=[(Δ12+Δ22+Δ32+Δ42)/4]1/2
Фиг. 5C иллюстрирует, что когда поисковый алгоритм достигает минимум среднего радиального расстояния Δ при сдвиге координат (Cx, Cy) центра круга 124' подбора, сдвинутый круг 124' подбора становится по существу концентрическим с офтальмической структурой, образованной линией 122 высокого градиента/высокой контрастности. Это можно видеть, например, из симметрии отдельных радиальных расстояний: Δ1=Δ2=Δ3=Δ4. Соответственно, координаты (Cx, Cy) центра сдвинутого круга 124' подбора по существу совпадают с координатами (Ox, Oy) центра офтальмической структуры, соответствующей линии 122 высокого градиента/высокой контрастности. Этот подход может заканчиваться, когда сдвинутый круг 124' подбора становится концентрическим с офтальмической структурой 122, но радиусы двух структур остаются разными.
Фиг. 5D-E иллюстрируют, что некоторые реализации также могут определять радиус офтальмической структуры, продолжая поиск после достижения концентрического состояния путем регулировки радиуса сдвинутого круга 124' подбора, пока не будет найден глобальный минимум Δ(min). Для в точности круглых структур возможно достижение абсолютного глобального минимума Δ(min)=0. По достижении глобального минимума Δ(min), радиус отрегулированного по радиусу круга 124” подбора по существу равен радиусу офтальмической структуры, например лимба 6.
В типичном случае процессор 120 изображений может быть способен подбирать круг 124 подбора к линии 122 высокого градиента/высокой контрастности с или без регулировки его радиуса и, таким образом, делать вывод, что офтальмическая структура, указанная линией 122 высокой контрастности, является круговой. Затем процессор 120 изображений может определить, что цвет пикселей меняется с белого на отличный от белого при пересечении линии 122 высокого градиента/высокой контрастности. Этих данных может оказаться достаточно, чтобы процессор 120 изображений сделал вывод, что он идентифицировал круглый лимб 6 изображаемого глаза 1i.
В ходе этого процесса подбора процессор 120 изображений определяет координаты центра лимба 6, поскольку лимб 6 концентричен сдвинутому кругу 124' подбора и, таким образом, центр лимба 6 располагается в тех же координатах (Cx, Cy), что и центр сдвинутого круга 124' подбора. Таким образом, процессор 120 изображений может определить вектор 143 нарушения выравнивания который соединяет координаты (Cx, Cy) центра лимба 6 с известными координатами центра прицельного шаблона 117. Вектор 143 нарушения выравнивания может использоваться системой 130 снижения нарушения выравнивания для снижения нарушения выравнивания изображаемого глаза 1i с офтальмологической системой 100, как описано ниже.
Фиг. 6A-B иллюстрируют реализацию офтальмологической системы 100 формирования изображения, где система 130 снижения нарушения выравнивания включает в себя источник 140 света фиксации. Источник 140 света фиксации может проецировать свет 145 фиксации на не изображаемый контрольный глаз 1c пациента 8. Пациент 8 может получать инструкцию фокусироваться на свет 145 фиксации или следить на ним контрольным глазом 1c. Ответом снижения нарушения выравнивания системы 130 снижения нарушения выравнивания может быть регулировка света 145 фиксации.
Фиг. 7A иллюстрирует, что модуль 115 формирования изображения может помогать в определении нарушения выравнивания изображаемого глаза 1i и опорного компонента офтальмологического устройства 110 формирования изображения путем одновременного отображения участка изображения изображаемого глаза 1i и опорной точки или прицельного шаблона 117, например, прицельного круга, через свой интерфейс формирования изображения.
Опорным компонентом устройства 110 формирования изображения может быть объектив 112, модуль пациента, наконечник привязки, интерфейс, контактная линза, зрачок, смотровая рамка, система координат, внутренняя линза офтальмологической системы или любые эквиваленты.
Положение или отображение прицельного шаблона 117 может быть фиксированным относительно опорного компонента, в сущности, указывая позицию опорного компонента. Таким образом, одновременное отображение участка изображения изображаемого глаза 1i и прицельного шаблона 117 модулем 115 формирования изображения может эффективно способствовать определению нарушения выравнивания изображаемого глаза 1i.
Процессор 120 изображений может одновременно анализировать отображаемый участок изображения изображаемого глаза 1i и прицельный шаблон 117 и вычислять нарушение выравнивания. Детали вычисления нарушения выравнивания были в значительной степени описаны выше. Процессор 120 изображений может объединять вычисленные направление и величину нарушения выравнивания, формируя вектор 143 нарушения выравнивания. На основании этого вектора 143 нарушения выравнивания, процессор 120 изображений может вычислять вектор 144 снижения нарушения выравнивания, подлежащий использованию системой 130 снижения нарушения выравнивания для снижения или устранения вычисленного нарушения выравнивания. В общем случае, вектор 144 снижения нарушения выравнивания не обязан быть равным или просто противоположным вектору 143 нарушения выравнивания, поскольку он представляет, как нужно отрегулировать систему снижения нарушения выравнивания для снижения или устранения нарушения выравнивания. Поэтому вектор 144 снижения нарушения выравнивания также зависит от расстояния системы 130 снижения нарушения выравнивания от глаза 1 и от других факторов и, таким образом, может быть связан с самыми различными мерами снижение нарушения выравнивания.
Затем процессор 120 изображений может формировать сигнал управления светом фиксации для источника 140 света фиксации согласно определенному вектору 144 снижения нарушения выравнивания.
В некоторых реализациях изображение участка глаза и прицельного шаблона 117 не обязательно отображать. Вместо этого, устройство 110 формирования изображения может передавать их процессору 120 изображений в только электронной форме, невидимой оператору системы или хирургу.
Некоторые процессоры 120 изображений не используют круг 124 подбора, показанный на фиг. 5B-E. Вместо этого, эти реализации могут (a) непосредственно определять расстояния Δ*1, …, Δ*n нарушения выравнивания между линией 122 высокой контрастности и прицельным шаблоном 117 вдоль n лучей, как описано выше, где n является целым числом; и (b) осуществлять поисковый алгоритм для нахождения нарушения выравнивания офтальмической структуры соответствующий линии 122 высокой контрастности относительно прицельного шаблона 117 или другой опорной точки системы 100 формирования изображения. Отличие от ранее описанного способа состоит в том, что в настоящем способе прицельный шаблон 117 центрирован с устройством 110 формирования изображения, тогда как в предыдущих системах на промежуточном этапе круги 124 подбора сдвигались, чтобы быть концентрическими с офтальмической структурой, после чего определялось нарушение выравнивания круга подбора относительно прицельного шаблона 117.
Поисковый алгоритм может быть основан, например, на минимизации меры нарушения выравнивания, в том числе, например, вышеописанного среднего нарушения Δ выравнивания, или на симметризации расстояний Δ*1, …, Δ*n нарушения выравнивания в противоположных направлениях. После поиска можно определить вектор 143 нарушения выравнивания, чтобы охарактеризовать нарушение выравнивания. Затем процессор 120 изображений может вычислить вектор 144 снижения нарушения выравнивания на основании определенного вектора 143 нарушения выравнивания и вывести на источник 140 света фиксации сигнал управления светом фиксации, соответствующий вектору 144 снижения нарушения выравнивания.
Фиг. 7B иллюстрирует, что источник 140 света фиксации может принимать сигнал управления светом фиксации и формировать, проецировать или отображать свет 145 фиксации согласно принятому сигналу управления светом фиксации. Например, если нарушение выравнивания изображаемого глаза 1i происходит в направлении влево-вверх в системе координат системы 110 формирования изображения, как показано вектором 143 нарушения выравнивания на фиг. 7A, процессор 120 изображений может вычислять вектор 144f снижения нарушения выравнивания, на который свет 145 фиксации нужно отрегулировать в направлении вправо-вниз, благодаря чему, если контрольный глаз 1c будет следить за отрегулированным светом 145 фиксации, нарушение 143 выравнивания изображаемого глаза 1i будет существенно снижено, или в идеальном случае даже устранено.
Источник 140 света фиксации может сначала формировать и отображать свет 145 фиксации и затем перемещать отображаемый свет 145 фиксации согласно принятому сигналу управления светом фиксации. Поскольку движения контрольного глаза 1c и изображаемого глаза 1i сильно связаны друг с другом, когда контрольный глаз 1c перемещается пациентом согласно отображаемому свету 145 фиксации, изображаемый глаз 1i перемещается соответствующим образом. Вследствие этой корреляции между движениями изображаемого глаза 1i и контрольного глаза 1c, система 120 света фиксации может способствовать снижению нарушения выравнивания изображаемого глаза 1i относительно офтальмологической системы 110 формирования изображения.
Другие варианты осуществления могут просто отображать свет 145 фиксации с помощью источника 140 света фиксации в надлежащим образом выбранном положении согласно сигналу управления светом фиксации, вместо того, чтобы перемещать его. В любом из этих вариантов осуществления пациент может получать инструкцию следить за светом 145 фиксации или фокусироваться на него контрольным глазом 1c.
Источник 140 света фиксации может включать в себя матрицу СИД, плазменный экран, электронный дисплей, компьютерный дисплей, экран ЖКД, видео-модуль, оптомеханический проектор, щелевую лампу, процессорную систему обработки изображений или источник света, приводимый в движение электромеханическим приводом.
Фиг. 7C иллюстрирует, что после того, как пациент следует регулировке света 145 фиксации контрольным глазом 1c, изображаемый глаз 1i может по существу центрироваться с прицельным шаблоном 117 и таким образом выравниваться с оптической осью 28 системы 100 формирования изображения. Реализации могут не регулировать радиус прицельного шаблона 117 для подбора радиуса лимба 6, таким образом, эти круги могут оказываться только концентрическими, но не наложенными.
Фиг. 6B иллюстрирует внешний вид офтальмологической системы 100 для пациента 8 в некоторых вариантах осуществления. Левая панель демонстрирует, что изображаемый глаз 1i может видеть объектив 112, окруженный, например, шестью источниками 111 света формирования изображения. Правая панель демонстрирует, что не изображаемый/контрольный глаз 1c может видеть свет 145 фиксации, отображаемый на источнике 140 света фиксации. В этом варианте осуществления источником 140 света фиксации может быть экран ЖКД или его эквивалент, и свет 145 фиксации может представлять собой яркое пятно, отображаемое на темном экране ЖКД 140.
Для облегчения процедур на обоих глазах, некоторые варианты осуществления могут включать в себя два источника 140 света фиксации, по одному на каждой стороне объектива 112.
В некоторых реализациях процессор 120 изображений может отображать обработанное изображение, например, для информирования медицинского специалиста или хирурга. В других реализациях по меньшей мере часть изображения, обработанного процессором 120 изображений, может не отображаться системой 100 формирования изображения, передаваясь только в электронном формате на процессор 120 изображений устройством 110 формирования изображения.
Фиг. 8A-B иллюстрируют случай, когда нарушение выравнивания глаза является исключительно угловым, что рассматривалось в связи с фиг. 3B. Как и раньше, оптическая ось 9i изображаемого глаза 1i может поворачиваться на углы Эйлера (θ, φ) относительно оптической оси 28 системы 100 формирования изображения. Соответственно, оптическая ось 9c контрольного глаза 1c может поворачиваться приблизительно на те же углы Эйлера (θ, φ) относительно оси источника 140 света фиксации, вдоль которой также распространяется свет 145 фиксации.
Фиг. 9A-B иллюстрируют работу процессора 120 изображений, выполненного с возможностью анализа углового нарушения выравнивания, показанного на фиг. 8A-B. Прежде всего, процессор 120 изображений может идентифицировать различные офтальмические структуры изображаемого глаза 1i, например лимб 6i, путем идентификации линий 122 высокого градиента/высокой контрастности изображения, как описано выше.
Фиг. 9A иллюстрирует, что хотя выровненный лимб 6ia будет выглядеть как круг, в случае углового нарушения выравнивания повернутый лимб 6ir, с точки зрения процессора 120 изображений, выглядит эллиптическим. Таким образом, в ходе эксплуатации процессору 120 изображений не удастся подобрать круг 124 подбора в качестве пробной функции к линии 122 высокого градиента/высокой контрастности.
Фиг. 9B иллюстрирует, что, когда процессору 120 изображений не удается подобрать круг 124 подбора, он может попытаться подобрать эллипс 124' подбора к линии 122' высокого градиента/высокой контрастности для идентификации повернутого лимба 6ir или повернутого зрачка 4ir. Аспектное отношение a/c, т.е. отношение длин малой и большой осей эллипса 124' подбора, можно использовать для определения углов Эйлера (θ,φ) углового нарушения выравнивания изображаемого глаза 1i.
Фиг. 8B иллюстрирует, что когда процессор 120 изображений успешно определяет углы Эйлера (θ, φ) углового нарушения выравнивания из аспектного отношения a/c эллипса 124' подбора, подобранного к линии 122' высокого градиента/высокой контрастности, он может вычислять вектор 144fa снижения нарушения выравнивания, на который нужно переместить свет 145 фиксации на источнике 140 света фиксации. Этот вектор 144fa снижения нарушения выравнивания можно построить так, что, если контрольный глаз 1c следит за светом 145 фиксации отрегулированный на вектор 144fa снижения углового нарушения выравнивания, как указано сплошной черной стрелкой, угловое нарушение выравнивания можно снизить или, возможно, даже устранить. В данном случае суффикс «f» вектора 144fa снижения нарушения выравнивания указывает, что система 130 снижения нарушения выравнивания относится к типу света 140 фиксации, и суффикс «a» относится к угловому нарушению выравнивания.
Фиг. 10A-B иллюстрируют случай поперечного нарушения Δ выравнивания. Источники 140 света фиксации могут включать в себя коллиматор 142, который может быть выполнен с возможностью формирования света 145 фиксации для руководства пациентом в эффективном снижении поперечного нарушения Δ выравнивания. Коллиматор 142 может формировать свет 145 фиксации с по существу параллельными лучами, как если бы он формировался источником света на бесконечности. Таким образом, пациент 8 может видеть этот коллимированный свет 145 фиксации, только если он смотрит прямо вдоль линии света 145 фиксации. Таким образом, в системах, где коллимированный свет 145 фиксации проецируется вдоль оптической оси 28 системы, когда пациент управляет для регулировки изображаемого глаза, чтобы видеть коллимированный свет 145 фиксации, оптическая ось 9i изображаемого глаза параллельна оптической оси 28 системы.
В ходе эксплуатации процессор 120 изображений может определять поперечное нарушение Δ выравнивания изображаемого глаза из анализа изображения изображаемого глаза 1i, и вычислять соответствующий вектор 144fl снижения нарушения выравнивания, причем суффикс l относится к поперечному нарушению выравнивания в этой системе света фиксации, обозначенной суффиксом f. Затем процессор 120 изображений может формировать сигнал управления светом фиксации, представляющий вычисленный вектор 144fl снижения нарушения выравнивания для отправки на источник 140 света фиксации. Приняв сигнал управления светом фиксации, источник 140 света фиксации может перемещать или регулировать коллимированный свет 145 фиксации на вектор 144fl снижения нарушения выравнивания, указанный сплошной стрелкой. Пациент 8 может получать инструкцию для перемещения его головы для нахождения отрегулированного коллимированного света 145 фиксации. Чтобы фактически видеть коллимированный свет 145 фиксации, пациенту 8 придется переместить свою голову в поперечном направлении, пока поперечное нарушение ∆ выравнивания не будет по существу исключено.
Фиг. 11 иллюстрирует реализацию системы 130 снижения нарушения выравнивания, которая включает в себя контроллер 150 гентри, выполненный с возможностью приема сигнала управления светом фиксации от процессора 120 изображений и соответствующего перемещения гентри 155, причем гентри 155 выполнено с возможностью перемещения подвижной части устройства 110 формирования изображения. Двигатель или привод, перемещающий гентри 155, может входить в состав контроллера 150 гентри или гентри 155. Подвижной частью устройства 110 формирования изображения может быть объектив 112 или участок оптического узла 114. В этой реализации ответ снижения нарушения выравнивания включает в себя контроллер 150 гентри, перемещающий гентри 155 для снижения поперечного нарушения выравнивания. В некоторых реализациях гентри 155 может входить в состав офтальмологического устройства 110 формирования изображения.
Фиг. 12A-B иллюстрируют работу системы на основе гентри, показанной на фиг. 11. Часто бывает так, что угловое нарушение выравнивания изображаемого глаза 1i минимально, таким образом, основной целью процесса регулировки является снижение поперечного нарушения выравнивания оптической оси 9i относительно оптической оси 28 устройства 110 формирования изображения. Это поперечное нарушение выравнивания или смещение может характеризоваться вектором 143 нарушения выравнивания (Δx, Δy), или величиной этого вектора 143 нарушения выравнивания, Δ, как рассмотрено, например, в связи с фиг. 3A.
Фиг. 12A иллюстрирует, что процессор 120 изображений может анализировать изображение изображаемого глаза 1i, определять вектор (Δx, Δy) нарушения выравнивания, затем определять соответствующий вектор 144gl снижения нарушения выравнивания и выводить на контроллер 150 гентри сигнал управления, представляющий вектор 144gl снижения нарушения выравнивания. В данном случае суффикс g относится к системе 130 снижения нарушения выравнивания типа гентри.
Некоторые аспекты этих систем на основе гентри отличаются от соответствующих аспектов систем света фиксации, показанных на фиг. 6-10. В этих системах на основе гентри, пациента не обязательно просить перемещать изображаемый глаз 1i, поскольку гентри 155 выполнено с возможностью перемещения подвижной части устройства 110 формирования изображения для снижения или устранения поперечного нарушения выравнивания.
Фиг. 12B иллюстрирует, что контроллер 150 гентри может, в ответ на сигнал управления, перемещать гентри 155 на вектор 144gl снижения поперечного нарушения выравнивания для устранения поперечного нарушения ∆ выравнивания и выравнивания оптической оси 9i изображаемого глаза с оптической осью 28 устройства 110 формирования изображения.
На практике хирург-офтальмолог часто сталкивается с сочетанием вышеупомянутых углового и поперечного нарушений выравнивания. Передовые однокомпонентные реализации системы 130 снижения нарушения выравнивания могут быть способны снизить или устранить оба эти нарушения выравнивания, как описано ниже.
Например, в системе 130 снижения нарушения выравнивания, единственным компонентом которой является источник 140 света фиксации, в первой фазе процессор 120 изображений может выполнять способ, показанный на фиг. 9, для вычисления углового нарушения выравнивания изображаемого глаза 1i. Однако эллиптическое искажение лимба 6i может быть вызвано, как угловым нарушением выравнивания, так и поперечным нарушением выравнивания, и эти два эффекта необходимо разделять.
В одной реализации процессор 120 изображений может проецировать свет 145 фиксации в подходящем первом положении, и пациент может получать инструкцию фокусироваться на этом однократно отрегулированном свете 145 фиксации. Из измерения эллиптичности лимба 6i, зная первое положение и положение глаза на интерфейсе 115 формирования изображения, процессор 120 изображений может определить поперечное и угловое нарушения выравнивания. На основании определенного поперечного нарушения выравнивания, пациент может получать инструкцию для перемещения изображаемого глаза 1i в центр устройства 110 формирования изображения. Этот процесс может осуществляться итерационно для достижения достаточной точности. Иногда можно повторно регулировать свет 145 фиксации и повторно измерять эллиптичность, чтобы способствовать процессу.
После центрирования глаза с достаточной точностью, процессор 120 изображений может вторично регулировать свет 145 фиксации, обычно во второе положение, соответствующее центру устройства 110 формирования изображения. Пациент 8, фокусирующийся на этом дважды отрегулированном свете 145 фиксации, может устранить угловое нарушение выравнивания также.
Видимая эллиптичность лимба 6i может иметь также третью причину, помимо двух типов нарушений выравнивания: часто сам по себе лимб 6i не является полностью круглым. В некоторых реализациях процессору 120 изображений может требоваться осуществлять алгоритм улучшенной обработки изображений для разделения трех причин эллиптичности. Улучшенная обработка изображений может включать в себя отслеживание надлежащим образом выбранных функций качества или анализ оптических искажений изображения. Примером функции качества может быть площадь подобранного эллипса.
Аналогичным образом, однокомпонентная система 130 снижения нарушения выравнивания на основе гентри может быть способна также корректировать оба типа нарушений выравнивания в отдельных фазах.
Если вышеописанные двухфазные способы приводят только к снижению двух нарушений выравнивания, но не их устранению, две фазы можно повторять итерационно, пока два типа нарушений выравнивания не будут по существу устранены. Для облегчения таких итерационных подходов можно использовать самые разнообразные алгоритмы оптимизации и другие поисковые алгоритмы.
Фиг. 13 иллюстрирует реализацию системы 130 снижения нарушения выравнивания, которая включает в себя подвижную опору пациента, например ложе 168, перемещаемое посредством гентри 165 опоры/ложа, которое управляется и перемещается контроллером 160 гентри ложа. Приняв сигнал управления от процессора 120 изображений, контроллер 160 гентри может перемещать гентри 165 опоры/ложа на вектор 144bl снижения поперечного нарушения выравнивания, которое, в свою очередь, перемещает опору пациента/ложе 168. В данном случае суффикс b обозначает ложе 168.
Аспекты этой реализации включают в себя то, что относительная позиция оптических элементов в устройстве 110 формирования изображения не изменяются в ходе обычной эксплуатации, что позволяет поддерживать высокий уровень выравнивания и точности оптики. В то же время, вес и физическая протяженность опоры 168 пациента гораздо больше, чем у объектива 112, таким образом, высокоточная регулировка опоры 168 пациента имеет свои собственные проблемы.
Фиг. 14 иллюстрирует, что некоторые реализации системы 130 снижения нарушения выравнивания могут содержать, как систему 140-145 света фиксации, так и систему 150-155 гентри. Такая интегрированная система 130 снижения нарушения выравнивания могут давать возможность хирургу эффективно снижать и устранять оба типа нарушений выравнивания.
Фиг. 15A-B иллюстрируют, что в некоторых вариантах осуществления процессор 120 изображений может быть способен определять поперечное и угловое нарушения выравнивания вышеописанными способами и управлять источником 140 света фиксации и контроллером 150 гентри для снижения нарушений выравнивания.
Фиг. 15A иллюстрирует типичную ситуацию, когда изображаемый глаз имеет, как поперечное нарушение Δ или (Δx, Δy) выравнивания, так и угловое нарушение (θ, φ) выравнивания. Чтобы работать в таких ситуациях, процессор 120 изображений может быть выполнен с возможностью анализа изображения и вычисления вектора 144l снижения поперечного нарушения выравнивания и вектора 144a снижения углового нарушения выравнивания. Как и раньше, существует большое количество разных мер нарушения выравнивания, которые можно выражать угловыми, линейными, процентными и другими переменными. Термин «вектор нарушения выравнивания» может быть связан с любой из этих переменных, мер и их комбинаций.
Фиг. 15B иллюстрирует, что пациент может получать инструкцию следить за светом 145 фиксации, который отрегулирован на вектор 144fa снижения углового нарушения выравнивания для устранения углового нарушения выравнивания. Затем контроллер 150 гентри может регулировать гентри 155 на вектор 144gl снижения поперечного нарушения выравнивания для устранения поперечного нарушения выравнивания. Интегрированные варианты осуществления с таким гентри 155 могут эффективно и с высокой точностью снижать поперечное нарушение выравнивания, поскольку они не опираются на пациента, перемещающего изображаемый глаз в поперечном направлении.
Две фазы выравнивания снижение могут осуществляться в обратном порядке, или фазы могут попеременно повторяться. Согласно фиг. 13, гентри также может быть гентри 165 опоры, перемещающим опора 168 пациента вместо объектива 112 или подвижной части оптического узла 114.
Фиг. 16A-B иллюстрируют, что в некоторых интегрированных системах процессор 120 изображений может быть выполнен с возможностью определения углового и поперечного нарушения выравнивания посредством обработки изображения и дополнительной информации нарушения выравнивания.
Информация нарушения выравнивания может исходить от источника 170 света локатора. Источник 170 света локатора может формировать свет 175 локатора, который может направляться в главный оптический путь светоделителем 171. Оптический узел 114 и, в частности, объектив 112 может направлять или проецировать свет 175 локатора на изображаемый глаз 1i.
Если изображаемый глаз 1i можно аппроксимировать отражающей сферой или по меньшей мере участком отражающей сферы, то из стандартных геометрических соображений следует, что часть света 175 локатора, которая отражается обратно в объектив 112 параллельный оптической оси 28, является тем светом, который отражается от вершины сферического глаза 1. Этот отраженный свет будет именоваться апикальным отраженным светом 177 локатора. Показано, что другие лучи отражаются вне оптической оси 28 системы.
Фиг. 16B иллюстрирует, что изображение 177i апикального отраженного света 177 локатора может обнаруживаться процессором 120 изображений в общем изображении, сформированном устройством 110 формирования изображения, на модуле 115 формирования изображения, что показано белым пятном.
Для сферического изображаемого глаза 1i, имеющего поперечное нарушение ∆ выравнивания относительно оптической оси 28 системы, изображение белого пятна апикального отраженного света 177i локатора не совпадает с оптической осью системы, указанной сплошным крестом. Заметим, что относительные положения белого пятна и черного креста не зависят от возможного углового нарушения выравнивания изображаемого глаза. Таким образом, для сферических глаз, вектор, соединяющий изображаемый апикальный отраженный свет 177i локатора с крестовой отметкой оптической оси 28 системы, может обеспечивать дополнительную информацию выравнивания для процессора 120 изображений, которая позволяет ему определять поперечное нарушение выравнивания независимо от углового нарушения выравнивания.
Фиг. 17A-B иллюстрируют, что изображаемый глаз более правильно моделировать в виде первичной сферы с выступающей вторичной сферой, соответствующей роговице 2. Некоторые реализации процессора 120 изображений могут быть выполнены с возможностью определения информации нарушения выравнивания посредством анализа изображаемого апикального отраженного света 177i локатора на основании этой более реалистичной модели. Для этого анализа, процессор 120 изображений может использовать один или более параметров подбора, или результаты предоперационных измерений формирования изображения.
Фиг. 17A-B иллюстрируют общий случай, когда одновременно присутствуют угловое нарушение (θ,φ) выравнивания и поперечное нарушение Δ выравнивания. Если изображаемый глаз 1i имеет только поперечное нарушение Δ выравнивания, то пятно изображения апикального отраженного света 177i локатора совпадает с центром 6ic лимба, указанным сплошным косым крестом на фиг. 17B. Этот центр 6ic лимба невозможно непосредственно обнаружить, но можно вычислить, например, путем подбора круга 124 подбора к изображению лимба 6i.
Таким образом, вектор или отрезок, соединяющий пятно изображения апикального отраженного света 177i локатора и центр 6ic лимба, является примером информации преобладающего или чистого углового нарушения выравнивания, которую процессор 120 изображений может использовать для формирования вектора 144fa снижения нарушения выравнивания для источника 140 света фиксации для коррекции этого углового нарушения выравнивания.
С другой стороны, при учете сложной формы глаза, определение поперечного смещения Δ, например, между оптической осью 28 системы и центром 1x изображаемого глаза 1i, может быть более проблематичным, чем в процедуре, показанной на фиг. 16A-B. Таким образом, в первой фазе, оператор системы 100 может регулировать свет 145 фиксации и предписывать пациенту сфокусироваться на отрегулированном свете 145 фиксации, пока не будет достигнуто перекрытие или совпадение центра 6ic лимба и пятна изображения апикального отраженного света 177i локатора, таким образом, устраняя угловое нарушение выравнивания и выравнивая оптическую ось 28 системы с оптической осью изображаемого глаза 9i.
В последующей второй фазе расстояние или вектор между оптической осью 28 системы, указанной сплошным крестом, и перекрытием пятна изображения апикального отраженного света 177i локатора и центра 6ic лимба (сплошного косого креста) может обеспечивать информацию поперечного нарушения выравнивания. Процессор 120 изображений может вычислять вектор 144gl снижения поперечного нарушения выравнивания с использованием этой информации поперечного нарушения выравнивания и посылать соответствующий сигнал управления на контроллер 150 гентри. В ответ, контроллер 150 гентри может регулировать гентри 155 на вектор 144gl снижения поперечного нарушения выравнивания.
На практике также можно осуществлять многочисленные эквивалентные реализации вышеописанных принципов, например осуществление первой и второй фаз на повторяющихся итерационных этапах или в обратном порядке.
Фиг. 18 иллюстрирует, что некоторые реализации системы 130 снижения нарушения выравнивания выполнены с возможностью снижения или даже устранения углового и поперечного нарушений выравнивания посредством вышеописанных операций. Как показано, поперечное нарушение выравнивания можно снизить посредством перемещения только изображаемого глаза 1i, или посредством дополнительного поперечного перемещения (Δx, Δy) изображаемого глаза 1i и (Δx', Δy') устройства 110 формирования изображения.
Когда оба типа нарушений выравнивания снижены или устранены системой 130 снижения нарушения выравнивания, оператор офтальмологической системы 100 может опустить интерфейс 180 пациента, выполненный с возможностью привязки к изображаемому глазу 1i пациента. Этот интерфейс 180 пациента может обездвиживать изображаемый глаз 1i, удерживая его в фиксированном положении для последующих процедур. Эти процедуры могут включать в себя диагностические процедуры, процедуры формирования изображения и офтальмологические хирургические операции.
В частности, объектив 112 офтальмологической системы 100 может включать в себя дальнюю линзу 112-1 объектива, содержащуюся в корпусе 112-2 объектива. Интерфейс 180 пациента может включать в себя интерфейсную линзу, контактную линзу, иногда также именуемую упрощающей пластиной 180-1, содержащиеся в корпусе 180-2 интерфейса. Интерфейс 180 пациента может присоединяться к объективу 112 или к дальнему концу системы 110 формирования изображения. В других вариантах осуществления часть интерфейса 180 пациента допускает присоединение к глазу, а другая часть - к дальнему концу системы 110 формирования изображения. Интерфейс 180 пациента допускает присоединение к глазу с помощью всасывающего кольца или вакуумной юбки 180-3.
В этих архитектурах интерфейс 180 пациента может привязываться к изображаемому глазу 1i по завершении выравнивания изображаемого глаза 1i с устройством 110 формирования изображения. В других вариантах осуществления интерфейс 180 пациента может привязываться к изображаемому глазу 1i в итерационном режиме. Во-первых, изображаемый глаз 1i может выравниваться с устройством 110 формирования изображения. Во-вторых, интерфейс пациента может опускаться на изображаемый глаз 1i с образованием контакта, но все же позволяя изображаемому глазу 1i совершать некоторые перемещения. Но поскольку в ходе первой фазы изображаемый глаз 1i может переместиться, или процессор 120 изображений может не точно определить выравнивание, в третьей фазе процедура выравнивания может повторяться, и процессор 120 изображений может вычислять один или более новых векторов снижения нарушения выравнивания. В-четвертых, изображаемый глаз 1i может повторно выравниваться с использованием вновь вычисленного(ых) вектора(ов) снижения нарушения выравнивания. Эти частичные или поэтапные фазы могут приводить к полной привязке интерфейса 180 пациента к изображаемому глазу 1i, препятствующей дальнейшему относительному перемещению устройства 110 формирования изображения и изображаемого глаза 1i.
Фиг. 19A-B иллюстрируют, что в некоторых вариантах осуществления офтальмологической системы 100', источник 140' света фиксации может проецировать свет 145' фиксации не на контрольный глаз 1c, но в главный оптический путь устройства 110' формирования изображения с помощью светоделителя BS, благодаря чему, вместо этого, свет 145' фиксации проецируется на изображаемый глаз 1i.
Фиг. 19B иллюстрирует внешний вид варианта осуществления 100' для пациента: свет 145' фиксации, оказывающийся в самом объективе 112', а не в отдельном источнике 140' света фиксации. В этих вариантах осуществления пациент может получать инструкцию следить за светом фиксации изображаемым глазом 1i, а не контрольным глазом 1c. Другие элементы этих вариантов осуществления 100', а также принципы их работы могут быть аналогичны или эквивалентны вышеописанным системам.
Фиг. 20A-B иллюстрируют разновидности варианта осуществления 100', показанного на фиг. 19A-B. В этих вариантах осуществления свет 175' локатора можно использовать в качестве второго света фиксации. Например, второй свет 175' локатора/фиксации может фокусироваться во второй фокальной точке 176, расположенной с z-координатой z2, отличной от z-координаты z1 первой фокальной точки 146 первого света 145' фиксации. В данном случае z-координаты световых излучений фиксации можно измерять от опорного уровня z0 вдоль оптического пути. z-координата z1 первой фокальной точки 146 первого света 145' фиксации не обязана находиться на дальнем конце объектива 112, как показано. Пациент 8 может получать инструкцию перемещать и вращать изображаемый глаз 1i для выравнивания первого света 145' фиксации и второго света 175' фиксации, в сущности, для выравнивания первой фокальной точки 146 и второй фокальной точки 176. Если обе первая и вторая фокальные точки 146 и 176 лежат на оптической оси 28 системы, эта процедура руководит пациентом для выравнивания оптической оси 9i изображаемого глаза с оптической осью 28 системы. Эту функциональную возможность можно реализовать несколькими разными способами.
В ряде случаев первая фокальная точка 146 может быть фиксированной, чтобы лежать на оптической оси 28 системы. В этих реализациях (i) процессор 120' изображений может идентифицировать поперечное и угловое нарушения выравнивания изображаемого глаза 1i посредством обработки изображения глаза 1i; (ii) процессор 120' изображений может представлять или проецировать второй свет 175' фиксации с надлежащим образом расположенной начальной фокальной точкой 176, и (iii) процессор 120' изображений может перемещать или регулировать второй свет 175' фиксации к оптической оси 28 системы для руководства пациентом 8 для выравнивания оптической оси 9i изображаемого глаза с оптической осью 28 системы. На фиг. 20A регулируемость второй фокальной точки 176 указана сплошной стрелкой.
В другой реализации второй свет 175' фиксации и его фокальная точка 176 может быть фиксированной на оптической оси 28 системы, и первая фокальная точка 146 может регулироваться процессором 120' изображений для руководства пациентом 8 для выравнивания оптической оси 9i изображаемого глаза с оптической осью 28 системы. На фиг. 20A регулируемость первого света 145' фиксации и его фокальная точка 146 указана сплошной стрелкой.
Фиг. 20A иллюстрирует, что в прочих реализациях первая фокальная точка 146 и вторая фокальная точка 176 могут быть регулируемыми, что указано двумя сплошными стрелками. В этих реализациях процессор 120' изображений может осуществлять более сложные или оптимизированные протоколы руководства для руководства пациентом 8 для выравнивания оптической оси 9i изображаемого глаза с оптической осью 28 системы.
Фиг. 20B иллюстрирует прочие варианты осуществления на основании вышеописанных принципов конструкции. В реализации коллиматора, показанной на фиг. 10A-B, офтальмологическая система 100 проецирует коллимированный свет 145 фиксации в глаз. Однако, поскольку коллиматор 142 делает лучи света 145 фиксации по существу параллельными, пациент может оказаться неспособен видеть коллимированный свет 145 фиксации из типичной невыровненной начальной позиции. В таких системах, пациент 8 может оказаться неспособен следовать инструкциям для выравнивания изображаемого глаза с коллимированным светом 145 фиксации и может нуждаться в помощи.
Некоторые варианты осуществления могут способствовать процессу выравнивания в этих реализациях коллиматора с обеспечением света 175' локатора, сфокусированного во второй фокальной точке 176. Поскольку свет 175' локатора не коллимирован, пациент 8 способен видеть вторую фокальную точку 176 даже из невыровненных позиций. В этих вариантах осуществления после того как пациент 8 фиксируется на свете 175' локатора, процессор 120' изображений может затем перемещать или регулировать свет 175' локатора (указанный сплошной стрелкой) для помощи пациенту для вращения и перемещения изображаемого глаза, пока пациент не увидит коллимированный свет 145' фиксации.
Фиг. 21 иллюстрирует, что некоторые офтальмологические системы 100” также могут включать в себя операционный лазер 190. Хирургический лазер 190 можно использовать для осуществления офтальмологической хирургической операции после того, как система 130 снижения нарушения выравнивания обеспечит возможность высокоточного выравнивания и привязки. Хирургическая операция может включать в себя операцию удаления катаракты, операцию коррекции зрения, операцию на сетчатке и различные другие офтальмологические операции.
Некоторые из этих офтальмологических систем 100” также могут включать в себя вторичную систему 195 формирования изображения. Эта вторичная система 195 формирования изображения может включать в себя систему оптической когерентной томографии (ОКТ). Системы ОКТ, в особенности частотного типа на основе спектрометра, весьма пригодны для построения трехмерных изображений офтальмических целевых областей, поскольку они способны получать данные изображения одновременно со всех глубин целевой области. Пучки хирургического лазера 190 и вторичной системы 195 формирования изображения могут направляться в главный оптический путь светоделителями BS1 и BS2, соответственно. Такие системы могут объединять функциональную возможность формирования изображения в направлении оси z системы 195 формирования изображения ОКТ с вышеописанной процедурой выравнивания на основе обработки изображений для достижения выравнивания, как с видимыми офтальмическими структурами, так и с целями внутри глаза.
Фиг. 22 иллюстрирует работу вышеописанных офтальмологических систем 100-100'-100”. Способ 200 выравнивания глаза с офтальмологической системой 100-100'-100” может включать в себя следующие фазы. (a) Формирование 210 изображения, в которой формируется изображение участка изображаемого глаза 1i пациента посредством офтальмологического устройства 100-100'-100” формирования изображения. (b) Определение 220 нарушения выравнивания, в которой который определяется нарушение выравнивания изображаемого глаза 1i и устройства 110 формирования изображения посредством процессора 120 изображений, обрабатывающего формируемое изображение. (c) Формирование 230 ответа снижения нарушения выравнивания, в которой электронным способом формируется ответ снижения нарушения выравнивания посредством системы снижения нарушения выравнивания на основании определенного нарушения выравнивания.
Формирование 210 изображения может включать в себя формирование изображения 212 участка изображаемого глаза 1i с помощью устройства 110-110'-110” формирования изображения.
Определение 220 нарушения выравнивания может включать в себя (1) идентификацию офтальмической структуры 222 в изображении 212. Офтальмической структурой может быть, например, зрачок 4, хрусталик 5 и лимб 6. Определение 220 также может включать в себя (2) определение нарушения выравнивания путем определения положения офтальмической структуры 222 относительно опорной точки устройства формирования изображения процессором 120 изображений. Опорной точкой устройства формирования изображения может быть объектив 112, модуль пациента, наконечник привязки, интерфейс, контактная линза, зрачок, смотровая рамка, система координат, внутренняя линза офтальмологической системы, или опорный шаблон 117, формируемый устройством 110-110'-110” формирования изображения. Нарушение выравнивания может быть поперечным или угловым нарушением выравнивания, определенным процессором 120 изображений, анализирующим изображение с использованием программных реализаций. Наконец, (3) процессор 120 изображений может формировать сигнал управления согласно определенному нарушению выравнивания и выводить формируемый сигнал управления на систему 130 снижения нарушения выравнивания.
Формирование 230 ответа снижения нарушения выравнивания может включать в себя формирование 230 ответа снижения нарушения выравнивания системой 130 снижения нарушения выравнивания. В некоторых вариантах осуществления формирование 230 ответа снижения нарушения выравнивания может включать в себя формирование света 145 фиксации источником 140 света фиксации согласно нарушению выравнивания, определенному процессором 120 изображений, в ответ на сигнал управления от процессора 120 изображений. Свет 145 фиксации может руководить пациентом 8 для снижения углового или поперечного нарушения выравнивания.
В одной реализации источник 140 света фиксации может включать в себя коллиматор 142 для формирования света 145 фиксации для руководства пациентом 8 для снижения поперечного нарушения выравнивания. Свет 145 фиксации может формироваться для не изображаемого, или контрольного глаза 1c, и свет 145 фиксации может регулироваться согласно определенному нарушению выравнивания для помощи пациенту в снижении нарушения выравнивания. В других реализациях свет 145 фиксации может формироваться для изображаемого глаза 1i.
Формирование 230 ответа снижения нарушения выравнивания может включать в себя контроллер 150 гентри, перемещающий гентри 155 устройства 110 формирования изображения для снижения поперечного нарушения выравнивания. В других вариантах осуществления контроллер 150 гентри может перемещать ложе 168 или комбинацию ложа 168 и гентри 155.
Определение 220 нарушения выравнивания может включать в себя определение углового и поперечного нарушения выравнивания с помощью процессора 120 изображений, обрабатывающего изображение и дополнительную информацию нарушения выравнивания. Соответственно, формирование 230 ответа снижения нарушения выравнивания может включать в себя эксплуатацию системы 140 света фиксации и контроллера 150 гентри для снижения углового и поперечного нарушения выравнивания.
Определение 220 нарушения выравнивания может включать в себя (1) проецирование света 175 локатора на изображаемый глаз 1i источником 170 света локатора, (2) определение положения изображения 177i апикального отраженного света 177 локатора в изображении, формируемом устройством 110 формирования изображения, и (3) определение информации нарушения выравнивания с использованием найденного изображаемого апикального отраженного света 177i локатора.
Определение 220 информации нарушения выравнивания может включать в себя определение информации углового нарушения выравнивания, связанной с расстоянием или вектором между изображением апикального отраженного света 177i локатора и положением изображаемой офтальмической структуры; и определение информации поперечного нарушения выравнивания, связанной с расстоянием или вектором между изображаемым апикальным отраженным светом 177i локатора или положением изображаемой офтальмической структуры и опорной точкой системы формирования изображения. Формирование 230 ответа снижения нарушения выравнивания может включать в себя снижение углового нарушения выравнивания путем регулировки системы 140 света фиксации и снижение поперечного нарушения выравнивания с помощью контроллера 150 гентри. Поскольку первая фаза снижения нарушения выравнивания может лишь снижать нарушение выравнивания, но не устранять его, фазы снижения углового нарушения выравнивания и снижения поперечного нарушения выравнивания в некоторых реализациях могут повторяться итерационно и попеременно.
В некоторых вариантах осуществления формирование 230 ответа снижения нарушения выравнивания может включать в себя использование света локатора в качестве второго света 175' фиксации. В этих вариантах осуществления снижение поперечного и углового нарушения выравнивания может включать в себя предписание пациенту 8 выравнивать первый свет 145' фиксации и второй свет 175' локатора/фиксации.
Наконец, некоторые реализации офтальмологической системы формирования изображения могут включать в себя устройство формирования изображения, которое формирует изображение изображаемого глаза пациента, и процессор, который определяет нарушение выравнивания изображаемого глаза и устройства формирования изображения посредством обработки формируемого изображения. Процессор может управлять системой света фиксации для проецирования света фиксации на глаз пациента для снижения углового нарушения выравнивания и управлять гентри для регулировки подвижного оптического элемента системы для снижения поперечного нарушения выравнивания.
Некоторые реализации офтальмологической системы формирования изображения могут включать в себя систему света индикатора, которая проецирует свет индикатора на изображаемый глаз для предоставления информации нарушения выравнивания процессору.
Хотя это описание изобретения содержит много особенностей, их не следует рассматривать как ограничения объема изобретения или того, что было заявлено, но лишь как описания признаков, характерных для конкретных вариантов осуществления. Определенные признаки, приведенные в этом описании изобретения в контексте отдельных вариантов осуществления, также могут быть реализованы совместно в одном варианте осуществления. Напротив, различные признаки, которые описаны в контексте одного варианта осуществления, также могут быть реализованы во множественных вариантах осуществления по отдельности или в любой подходящей подкомбинации. Кроме того, хотя признаки могут быть описаны выше как действующие в определенных комбинациях и даже первоначально заявленные таким образом, один или более признаков из заявленной комбинации в ряде случаев могут быть исключены из комбинации, и заявленная комбинация может относиться к подкомбинации или разновидности подкомбинации.

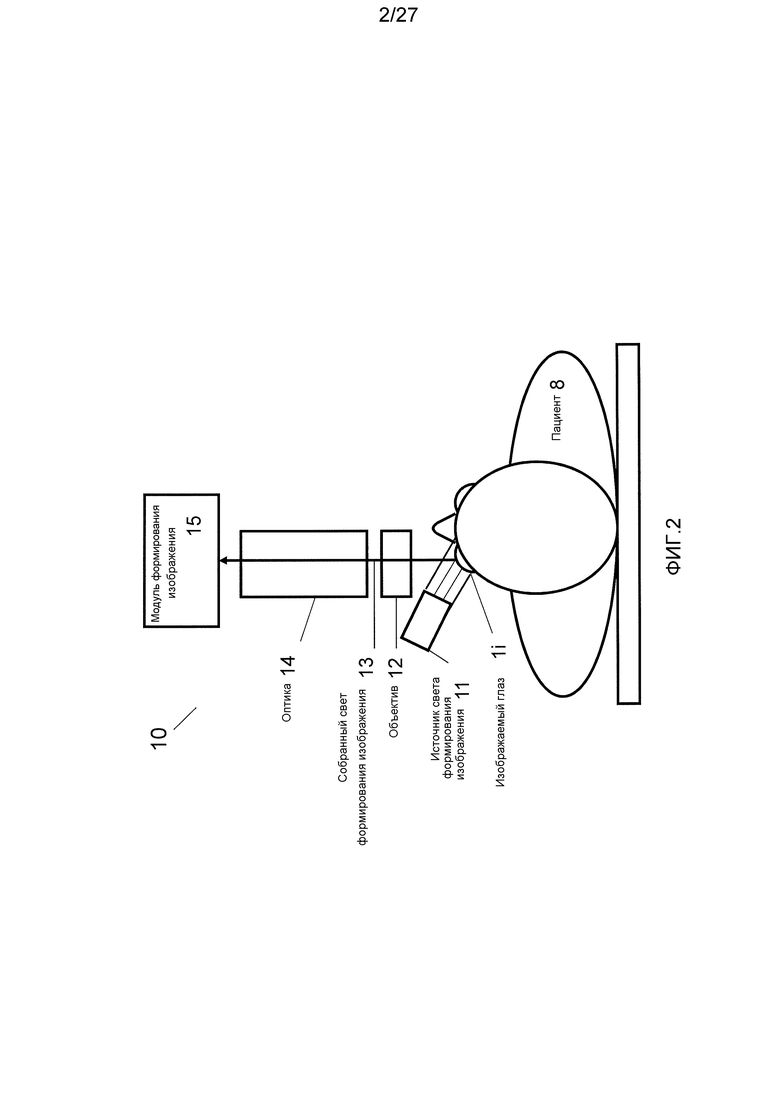


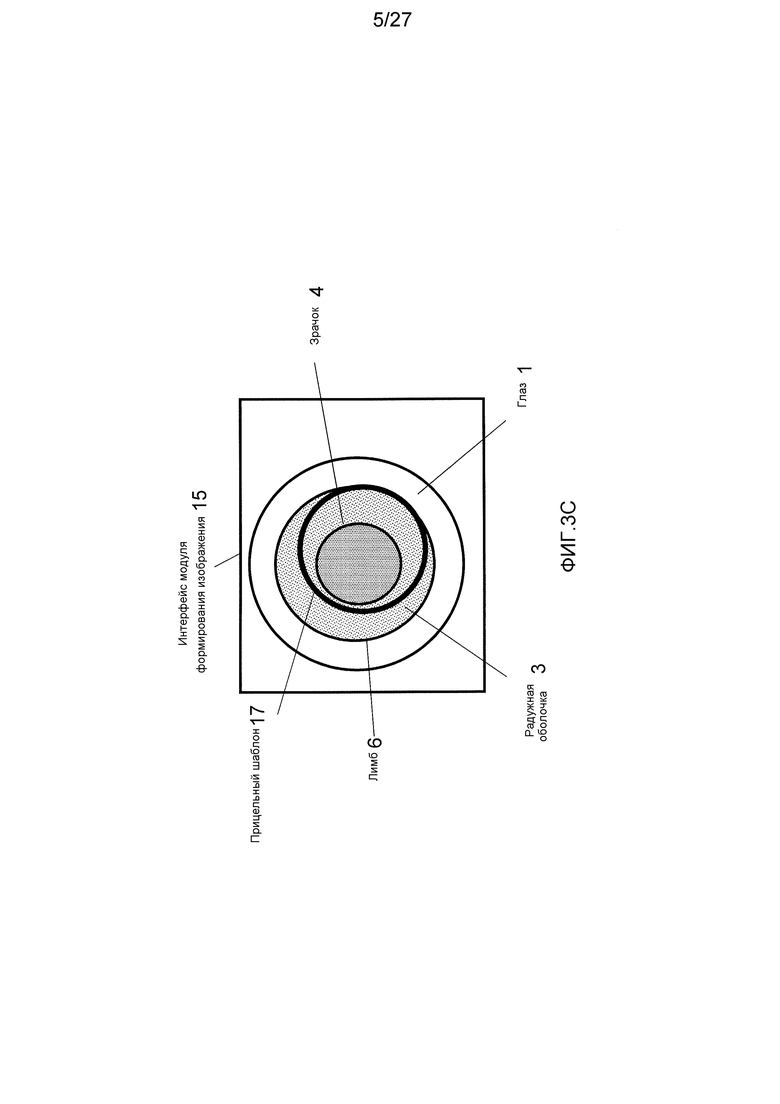
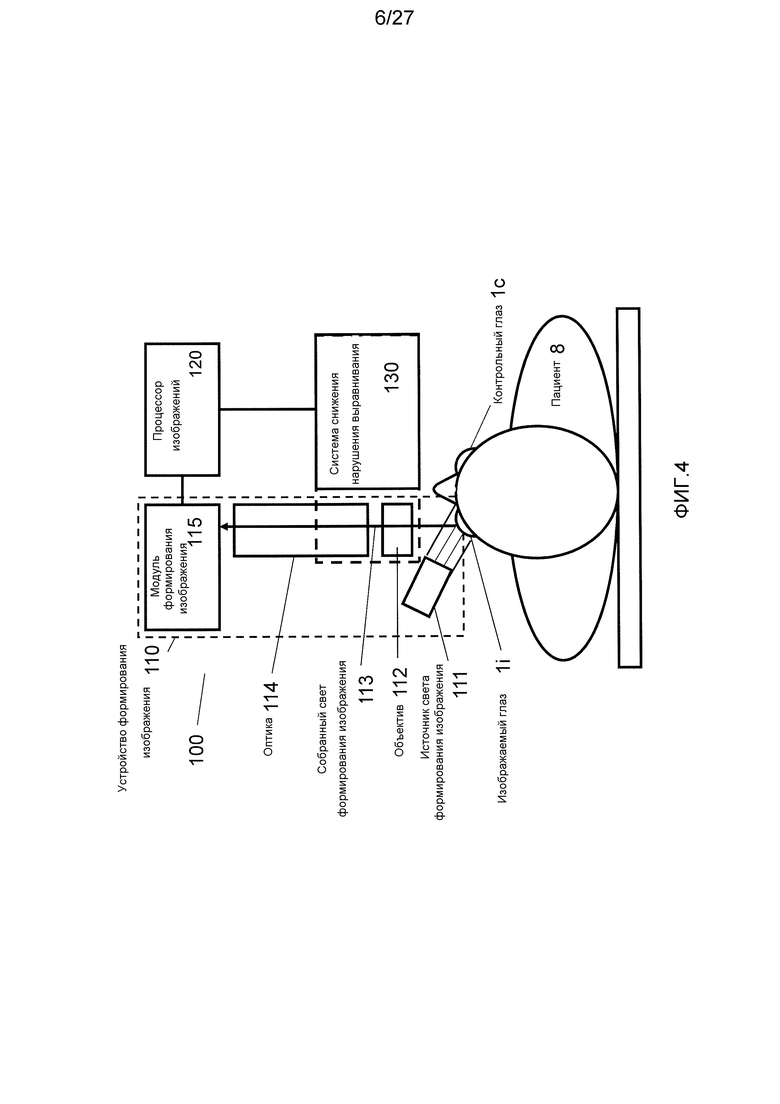


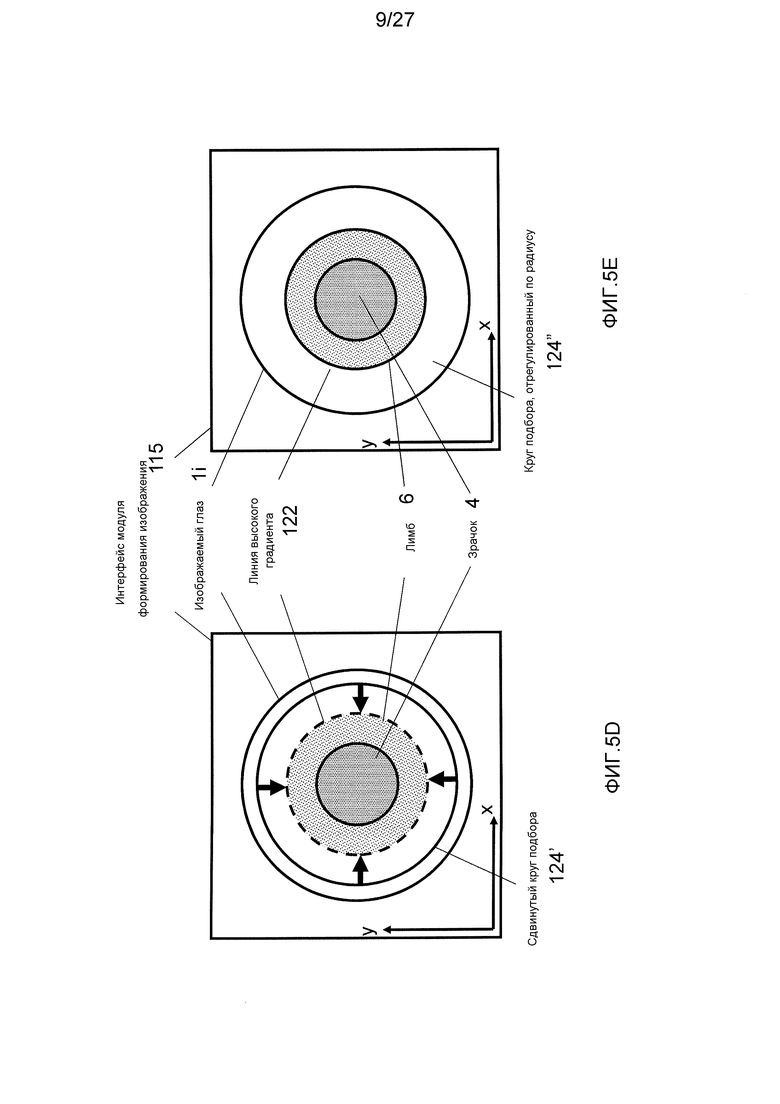
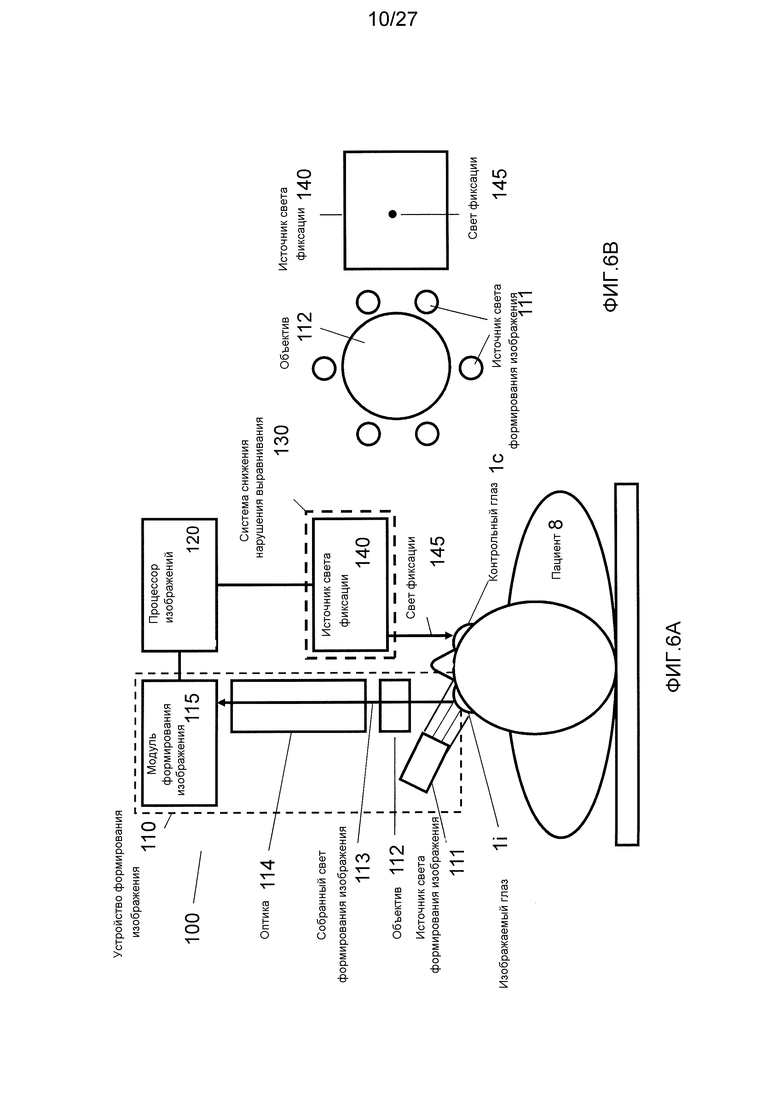



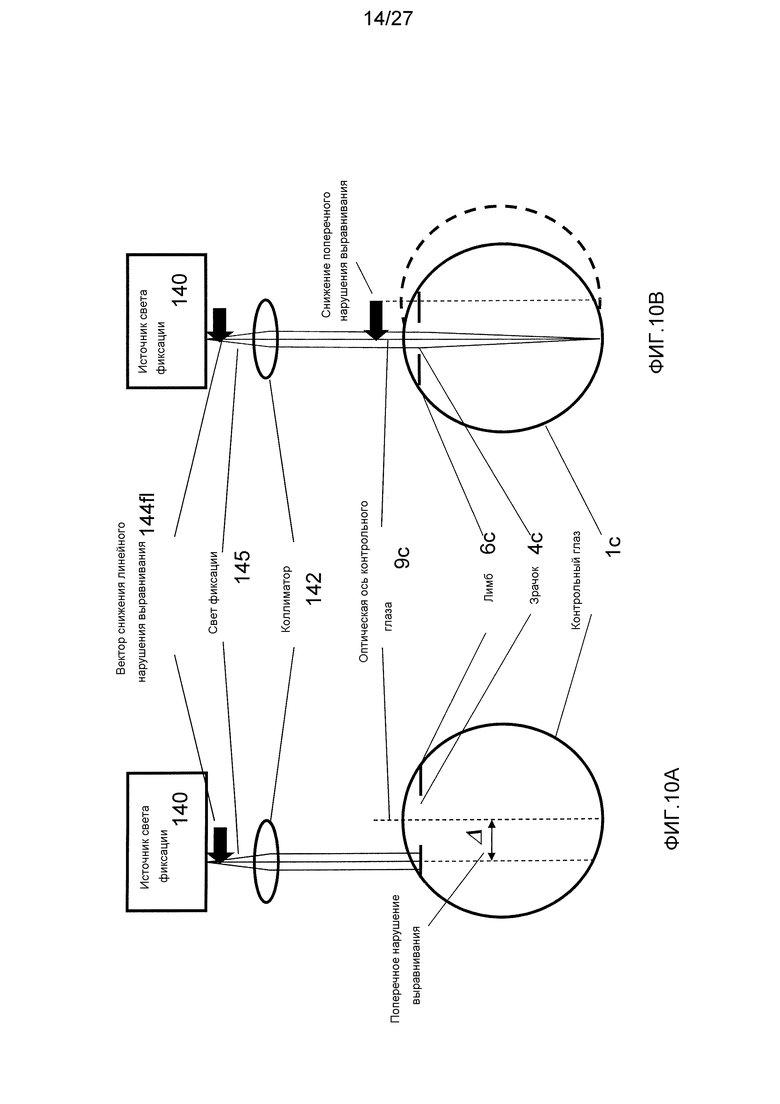
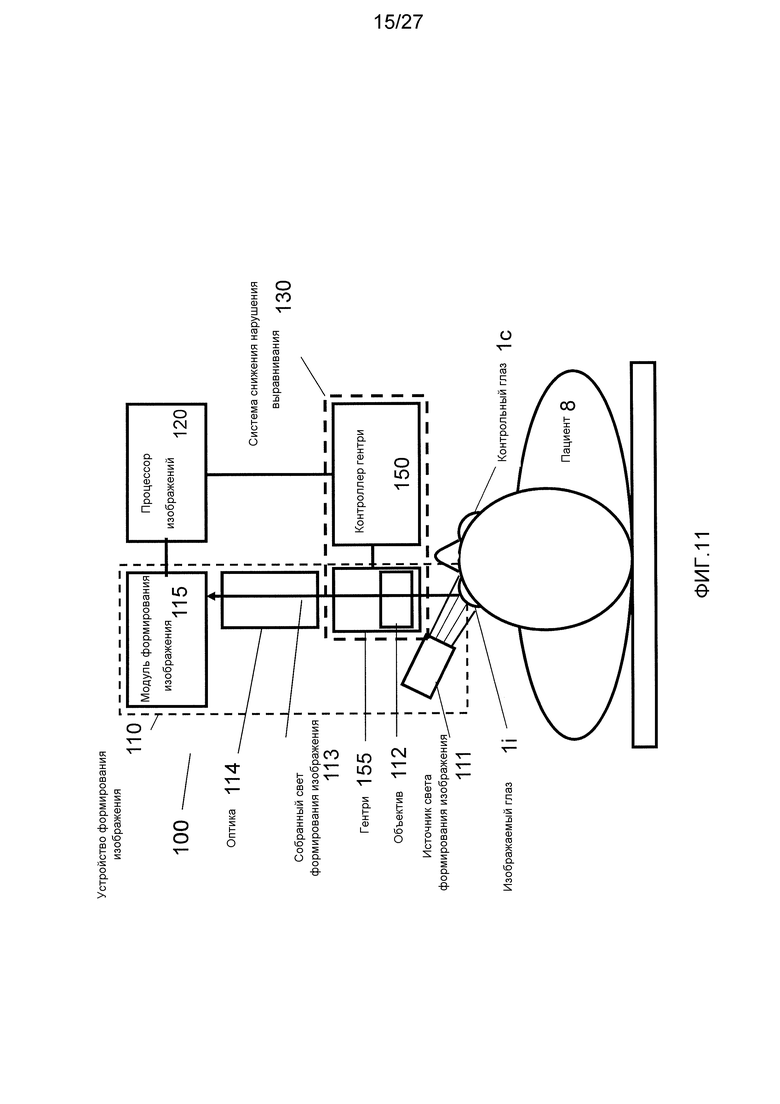



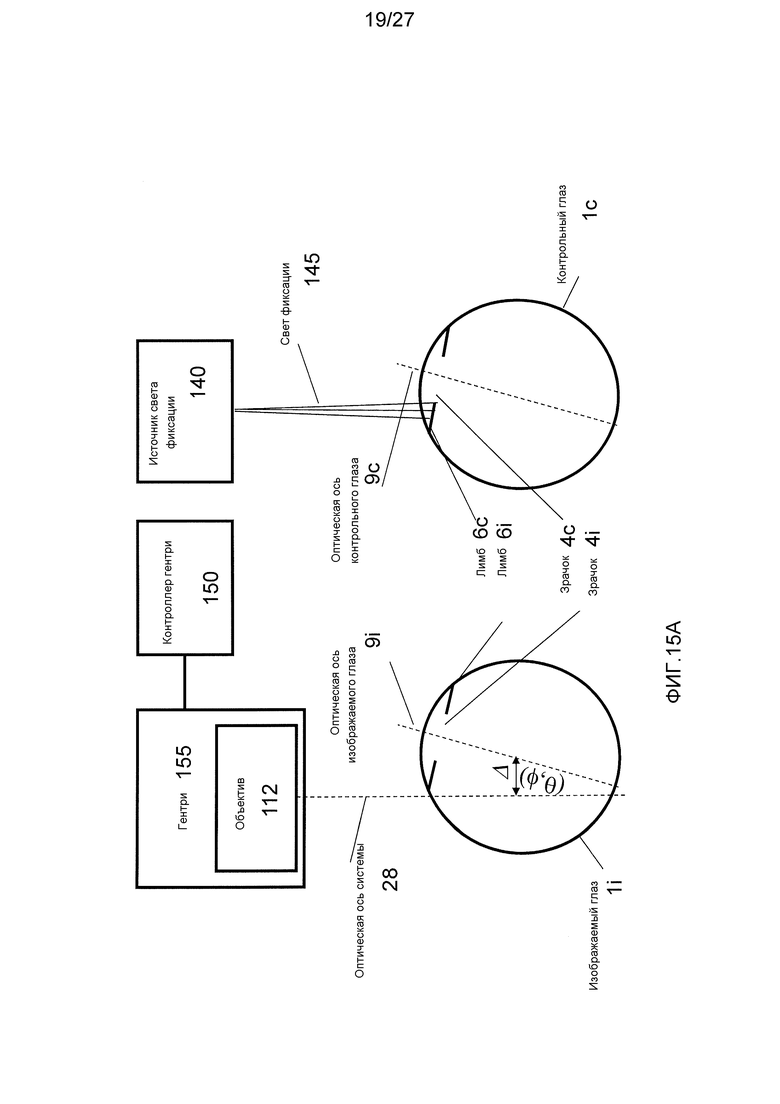


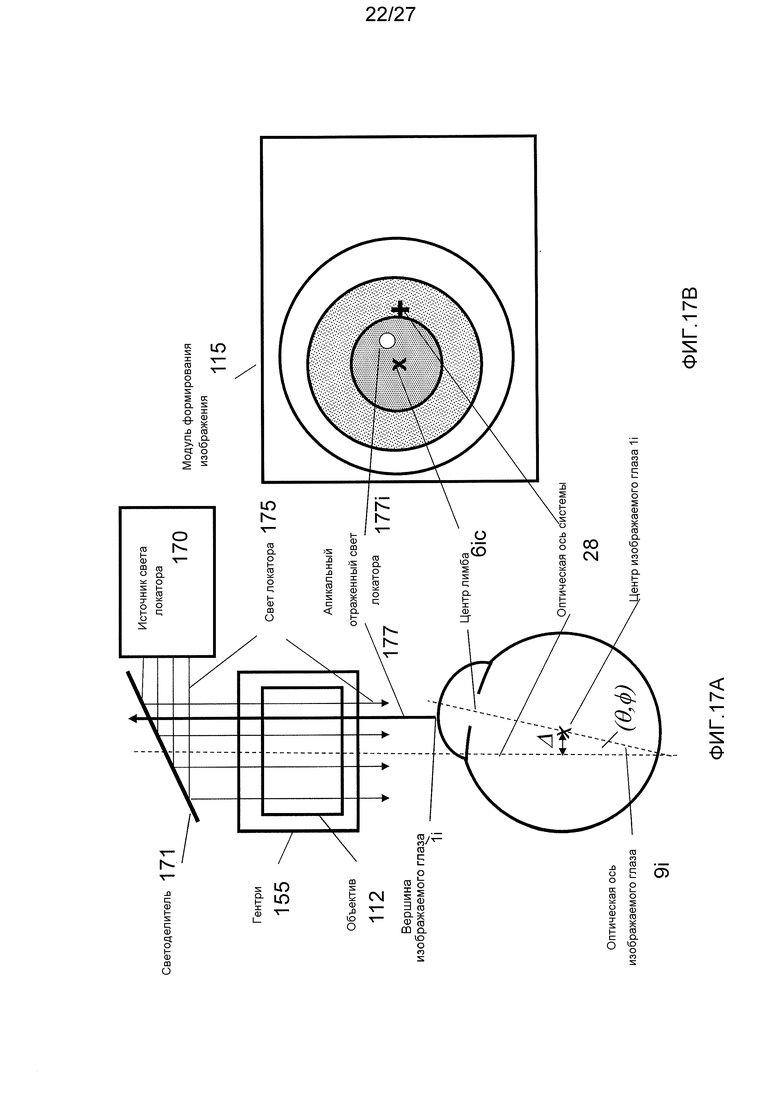


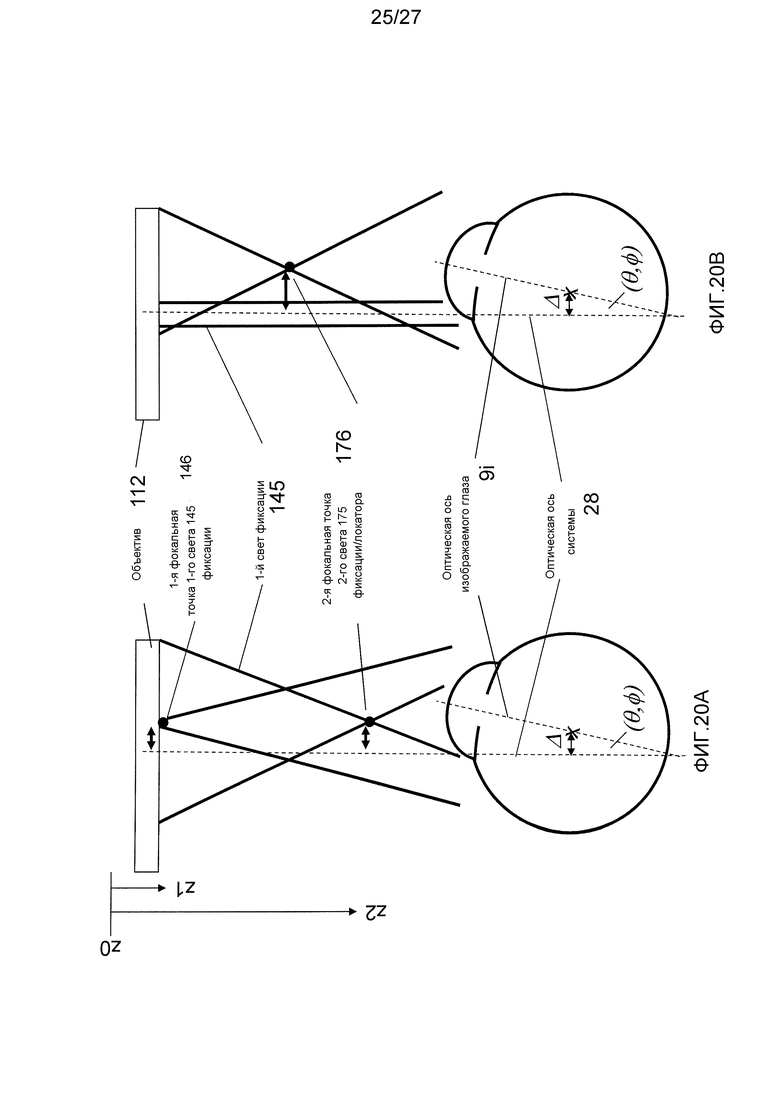

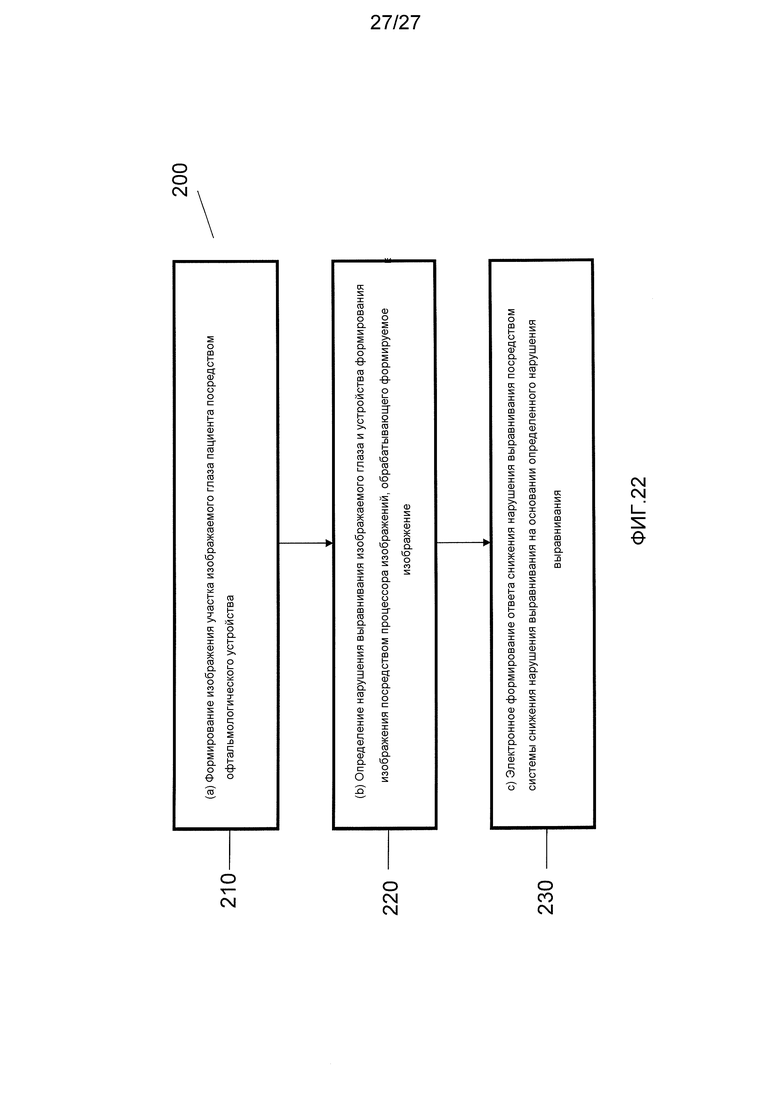
Группа изобретений относится к медицине. Офтальмологическая система содержит: офтальмологическое устройство формирования изображения, выполненное с возможностью формирования изображения участка изображаемого глаза пациента; процессор изображений, выполненный с возможностью определения нарушения выравнивания изображаемого глаза и устройства формирования изображения посредством обработки формируемого изображения, и формирования сигнала управления согласно определенному нарушению выравнивания; и систему снижения нарушения выравнивания, выполненную с возможностью приема сигнала управления, и формирования ответа снижения нарушения выравнивания; и интерфейс пациента, выполненный с возможностью привязки к изображаемому глазу пациента после выполнения ответа снижения нарушения выравнивания системой снижения нарушения выравнивания. Способ содержит этапы, на которых: формируют изображение участка изображаемого глаза пациента; определяют нарушение выравнивания изображаемого глаза и устройства формирования изображения; формируют ответ снижения нарушения выравнивания электронным способом и выполняют привязку к изображаемому глазу пациента после выполнения ответа снижения нарушения выравнивания. Применение данной группы изобретений позволит повысить точность выравнивания или привязки офтальмологической системы формирования изображения с глазом/к глазу пациента. 2 н. и 25 з.п. ф-лы, 22 ил.
1. Офтальмологическая система, содержащая:
офтальмологическое устройство формирования изображения, выполненное с возможностью формирования изображения участка изображаемого глаза пациента;
процессор изображений, выполненный с возможностью
определения нарушения выравнивания изображаемого глаза и устройства формирования изображения посредством обработки формируемого изображения, и
формирования сигнала управления согласно определенному нарушению выравнивания; и
систему снижения нарушения выравнивания, выполненную с возможностью
приема сигнала управления, и
формирования ответа снижения нарушения выравнивания, и
интерфейс пациента, выполненный с возможностью привязки к изображаемому глазу пациента после выполнения ответа снижения нарушения выравнивания системой снижения нарушения выравнивания.
2. Офтальмологическая система по п. 1, в которой офтальмологическое устройство формирования изображения содержит:
электронную систему обнаружения, которая обнаруживает собранный свет формирования изображения из изображаемого глаза, включающую в себя по меньшей мере одну из
матрицы приборов с зарядовой связью (ПЗС), матрицы комплементарных структур металл-оксид-полупроводник (КМОП), пиксельной матрицы и матрицы электронных датчиков; и
электронную систему отображения, которая отображает изображение участка изображаемого глаза в связи с обнаруженным собранным светом формирования изображения, включающую в себя по меньшей мере одно из
светодиодного (СИД) дисплея, дисплея на органических СИД (ОСИД), дисплея на активно-матричных ОСИД (АМОСИД), плазменного экрана, электронного дисплея, компьютерного дисплея, экрана жидкокристаллического дисплея (ЖКД), дисплея на основе электронно-лучевой трубки (ЭЛТ), видеомодуля, дисплея видеомикроскопа, стереоскопического дисплея видеомикроскопа, видеомикроскопа высокой четкости (HD), процессорной системы обработки изображений, оптомеханического проектора электронного или цифрового типа и источника света, приводимого в движение электромеханическим приводом.
3. Офтальмологическая система по п. 1, в которой:
процессор изображений выполнен с возможностью
идентификации офтальмической структуры в изображении, и
определения меры нарушения выравнивания путем определения положения офтальмической структуры относительно опорной точки устройства формирования изображения.
4. Офтальмологическая система по п. 3, в которой:
процессор изображений выполнен с возможностью идентификации офтальмической структуры путем определения линии высокого градиента в изображении, разделяющей элементы изображения, существенно отличающиеся яркостью или цветом.
5. Офтальмологическая система по п. 4, в которой:
процессор изображений выполнен с возможностью
подбора по меньшей мере одного из круга и эллипса к линии высокого градиента путем измерения радиальных расстояний между линией высокого градиента и кругом или эллипсом;
определения координаты положения подобранного круга или эллипса путем минимизации меры радиальных расстояний; и
определения меры нарушения выравнивания путем сравнения определенной координаты положения и координаты опорной точки.
6. Офтальмологическая система по п. 3, в которой:
процессор изображений выполнен с возможностью
определения линии высокой контрастности в изображении; определения расстояний нарушения выравнивания между линией высокой контрастности и прицельным шаблоном; и
определения меры нарушения выравнивания из расстояний нарушения выравнивания.
7. Офтальмологическая система по п. 3, в которой:
опорной точкой устройства формирования изображения является по меньшей мере одно из
объектива, модуля пациента, наконечника привязки, интерфейса, контактной линзы, зрачка, смотровой рамки, системы координат и внутренней линзы офтальмологической системы; и
устройство формирования изображения выполнено с возможностью формирования опорного шаблона, связанного с опорной точкой, для помощи процессору изображений в определении нарушения выравнивания изображаемого глаза и устройства формирования изображения.
8. Офтальмологическая система по п. 3, в которой:
распознанной офтальмической структурой является лимб изображаемого глаза.
9. Офтальмологическая система по п. 1, в которой:
система снижения нарушения выравнивания содержит источник света фиксации; и
ответ снижения нарушения выравнивания содержит источник света фиксации, формирующий свет фиксации в ответ на принятый сигнал управления.
10. Офтальмологическая система по п. 9, в которой:
источник света фиксации выполнен с возможностью
формирования света фиксации для неизображаемого глаза пациента; и
перемещения формируемого света фиксации согласно принятому сигналу управления для способствования снижению нарушения выравнивания между изображаемым глазом и опорным компонентом офтальмологической системы.
11. Офтальмологическая система по п. 9, в которой источник света фиксации содержит по меньшей мере одну из:
матрицы СИД, матрицы органических СИД (ОСИД), матрицы активно-матричных ОСИД (АМОСИД), плазменного экрана, электронного дисплея, компьютерного дисплея, экрана ЖКД, видеомодуля, оптомеханического проектора, ЭЛТ-дисплея, щелевой лампы, процессорной системы обработки изображений и источника света, приводимого в движение электромеханическим приводом.
12. Офтальмологическая система по п. 9, в которой:
источник света фиксации выполнен с возможностью формирования света фиксации для руководства пациентом в снижении углового нарушения выравнивания.
13. Офтальмологическая система по п. 12, в которой:
процессор изображений выполнен с возможностью определения углового нарушения выравнивания путем
подбора эллипса к линии высокой контрастности изображения; и
анализа по меньшей мере одного из аспектного отношения и площади подобранного эллипса.
14. Офтальмологическая система по п. 9, в которой:
источник света фиксации содержит коллиматор для формирования света фиксации для руководства пациентом в снижении поперечного нарушения выравнивания.
15. Офтальмологическая система по п. 1, в которой:
система снижения нарушения выравнивания содержит:
гентри, выполненное с возможностью перемещения подвижной части устройства формирования изображения; и
контроллер гентри, выполненный с возможностью приема сигнала управления от процессора изображений и перемещения гентри согласно принятому сигналу управления; и
ответ снижения нарушения выравнивания содержит контроллер гентри, перемещающий гентри и, таким образом, подвижную часть устройства формирования изображения для снижения поперечного нарушения выравнивания.
16. Офтальмологическая система по п. 1, в которой:
система снижения нарушения выравнивания содержит:
гентри опоры, выполненное с возможностью перемещения опоры пациента относительно устройства формирования изображения; и
контроллер гентри, выполненный с возможностью
приема сигнала управления от процессора изображений, и
перемещения гентри опоры согласно принятому сигналу управления; и
ответ снижения нарушения выравнивания содержит контроллер гентри, перемещающий гентри опоры и, таким образом, опору пациента для снижения поперечного нарушения выравнивания.
17. Офтальмологическая система по п. 1, в которой:
процессор изображений выполнен с возможностью определения углового и поперечного нарушения выравнивания посредством обработки изображения; и
система снижения нарушения выравнивания содержит только один из источника света фиксации и контроллера гентри.
18. Офтальмологическая система по п. 1, в которой:
процессор изображений выполнен с возможностью определения углового и поперечного нарушения выравнивания; и
система снижения нарушения выравнивания содержит источник света фиксации, гентри и контроллер гентри.
19. Офтальмологическая система по п. 18, в которой:
процессор изображений выполнен с возможностью определения углового и поперечного нарушения выравнивания посредством обработки изображения и информации нарушения выравнивания.
20. Офтальмологическая система по п. 19, в которой:
система формирования изображения содержит источник света локатора, выполненный с возможностью проецирования света локатора на изображаемый глаз; и
процессор изображений выполнен с возможностью идентификации апикального отраженного света локатора в изображении, формируемом устройством формирования изображения; и
определения информации нарушения выравнивания посредством анализа апикального отраженного света локатора.
21. Офтальмологическая система по п. 20, в которой:
информация нарушения выравнивания является по меньшей мере одной из
информации углового нарушения выравнивания, связанной с вектором в изображении между апикальным отраженным светом локатора и положением изображаемой офтальмической структуры; и
информации поперечного нарушения выравнивания, связанной с вектором в изображении между опорной точкой системы формирования изображения и по меньшей мере одним из апикального отраженного света локатора и положения изображаемой офтальмической структуры.
22. Офтальмологическая система по п. 21, в которой:
офтальмологическая система выполнена с возможностью
снижения углового нарушения выравнивания путем регулировки источника света фиксации; и
снижения поперечного нарушения выравнивания с помощью контроллера гентри.
23. Офтальмологическая система по п. 20, в которой:
свет фиксации можно регулировать так, чтобы свет локатора и положение изображаемой офтальмической структуры можно было выравнивать путем регулировки света фиксации.
24. Офтальмологическая система по п. 20, в которой:
свет локатора невидим для изображаемого глаза.
25. Офтальмологическая система по п. 1, содержащая:
интерфейс пациента, выполненный с возможностью привязки к изображаемому глазу пациента после того, как система снижения нарушения выравнивания выполнит ответ снижения нарушения выравнивания.
26. Офтальмологическая система по п. 1, в которой:
система снижения нарушения выравнивания содержит источник света фиксации, выполненный с возможностью
формирования света фиксации для изображаемого глаза пациента; и
регулировки формируемого света фиксации согласно принятому сигналу управления для способствования снижению нарушения выравнивания между изображаемым глазом и опорным компонентом офтальмологической системы.
27. Способ выравнивания глаза с офтальмологической системой, причем способ содержит этапы, на которых:
формируют изображение участка изображаемого глаза пациента с помощью офтальмологического устройства формирования изображения;
определяют нарушение выравнивания изображаемого глаза и устройства формирования изображения с помощью процессора изображений, обрабатывающего формируемое изображение;
формируют ответ снижения нарушения выравнивания электронным способом с помощью системы снижения нарушения выравнивания на основании определенного нарушения выравнивания; и
выполняют привязку к изображаемому глазу пациента после выполнения ответа снижения нарушения выравнивания.
| US 2007013867 A1, 18.01.2007 | |||
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |
| US 20030206272 A1, 06.11.2003 | |||
| US 20090161827 A1, 25.06.2009 | |||
| US 2008055543 A1, 06.03.2008 | |||
| Мажоритарно-резервированный аналого-цифровой преобразователь | 1987 |
|
SU1444946A1 |
| US 5936706 A, 10.08.1999 | |||
| US 20070299429 A1, 27.12.2007. | |||

