Настоящее изобретение относится к области медицинских устройств и, более конкретно, хотя и не исключающе, к медицинским устройствам для прижигания и рассечения. Настоящее изобретение также относится к схемам возбуждения и способам возбуждения подобных медицинских устройств.
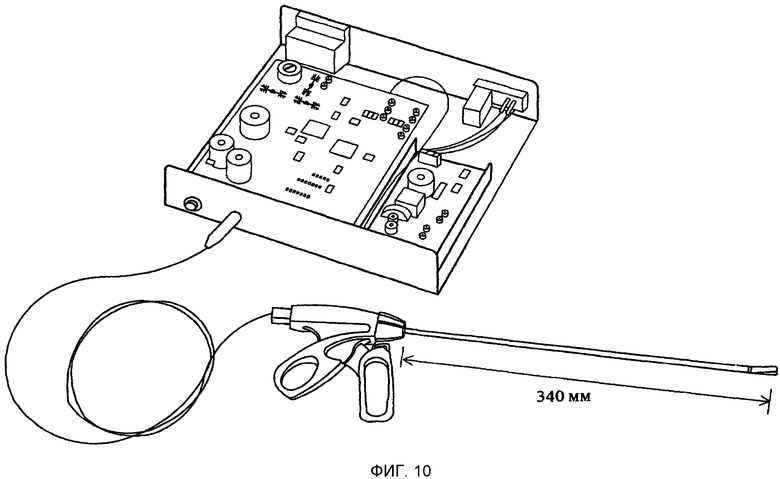
Многие хирургические процедуры требуют рассечения или лигирования кровеносных сосудов или иных внутренних тканей. Многие хирургические процедуры проводятся с использованием минимально инвазивных способов, и для рассечения или лигирования хирург применяет ручное устройство для прижигания. Существующие ручные устройства для прижигания требуют настольных силовых и управляющих электронных компонентов, которые соединяются с самим устройством электрическим кабелем. На фиг.10 приведен пример подобного используемого сегодня ручного устройства для прижигания.
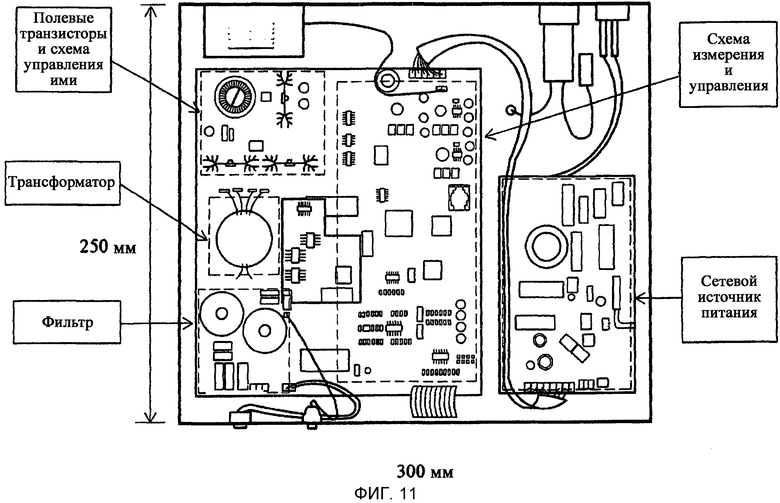
Давно известно, что такие существующие устройства неудобны и сложны для работы во время проведения хирургической процедуры из-за значительных размеров силовых и управляющих электронных компонентов и привязки ручного устройства для прижигания кабелем к силовым и управляющим электронным компонентам. Также давно известно, что эти трудности могут быть устранены при переходе к ручному устройству для прижигания с питанием от аккумуляторной батареи, в котором силовые и управляющие электронные компоненты устанавливаются в самом устройстве, например, внутри рукоятки устройства. Однако создание столь миниатюрных электронных компонентов в данном случае является непростой задачей. Мощность, которая должна подводиться к такому устройству при проведении хирургической процедуры, и существующие конструкции электронных схем таких устройств требуют применения крупногабаритных конденсаторов, катушек индуктивности и трансформаторов, а также теплоотводов и вентиляторов. На фиг.11 более подробно показаны различные части силовых и управляющих электронных компонентов, используемых в существующих конструкциях. Хотя размеры измерительных и управляющих электронных компонентов действительно могут быть уменьшены в размерах, габариты других частей электронных схем не могут быть снижены таким путем.
В частности, в существующих конструкциях электронных компонентов используются схемы для обеспечения регулируемого источника питания с выходным напряжением 24 вольта; полевые транзисторы и схемы управления ими; трансформатор для повышения напряжения питания; и схемы управления фильтрацией для удаления гармоник из прямоугольного напряжения, генерируемого переключателями на полевых транзисторах и трансформатором. Принимая во внимание уровни напряжения и мощности, требуемые для питания устройства для прижигания, трансформаторы и выходные фильтры должны быть достаточно крупногабаритными, а для охлаждения переключателей на полевых транзисторах требуются теплоотводы и вентиляторы значительных размеров.
Настоящее изобретение направлено на обеспечение альтернативной конструкции электронных модулей, которая позволит уменьшить габариты электронных модулей настолько, чтобы встроить их внутрь ручного устройства для прижигания, при этом обеспечивая выходную мощность и функции управления, требуемые для выполнения хирургической процедуры.
В настоящем изобретении предложено медицинское устройство, содержащее рабочий инструмент, имеющий по меньшей мере один электрический контакт, схему радиочастотного (РЧ) генератора для генерации РЧ сигнала возбуждения для обеспечения передачи РЧ сигнала возбуждения к по меньшей мере одному электрическому контакту, причем в состав схемы РЧ генератора входит резонансная цепь. В одном варианте осуществления схема радиочастотного генератора содержит схему управления переключением, которая генерирует периодически изменяющийся сигнал, такой как прямоугольный сигнал, из источника постоянного тока, а резонансная цепь выполнена с возможностью приема периодически изменяющегося сигнала от схемы управления переключением. Питание постоянным током предпочтительно обеспечивается одной или более аккумуляторными батареями, которые могут быть установлены в корпусе (таком как рукоятка) описываемого устройства.
В соответствии с другим аспектом в настоящем изобретении предложено медицинское устройство, содержащее: рукоятку для захвата рукой пользователя; соединенный с рукояткой рабочий инструмент, причем рабочий инструмент имеет по меньшей мере один электрический контакт; клеммы аккумулятора для подключения к одной или более аккумуляторным батареям; схему радиочастотного (РЧ) генератора, соединенную с указанными клеммами аккумулятора и выполненную с возможностью выработки РЧ сигнала возбуждения и подачи РЧ сигнала возбуждения на по меньшей мере один электрический контакт указанного рабочего инструмента; где схема радиочастотного генератора содержит: схему управления переключением для выработки периодически изменяющегося сигнала (который может представлять собой прямоугольный широтно-импульсно модулированный сигнал) из разности потенциалов на указанных клеммах аккумулятора; и резонансную схему возбуждения, связанную с указанной схемой управления переключением и выполненную с возможностью фильтрации периодически изменяющегося сигнала, вырабатываемого схемой управления переключением; и причем РЧ сигнал возбуждения получают как выходной сигнал указанной резонансной цепи.
Медицинское устройство может также содержать схему управления (в состав которой могут входить аппаратные и/или программные средства), которая изменяет частоту РЧ сигнала возбуждения. Схема управления может изменять частоту, исходя из результатов измерения РЧ сигнала возбуждения, с целью регулирования по меньшей мере одного из следующих параметров: мощности, напряжения и/или силы тока, выдаваемых на указанный по меньшей мере один электрический контакт рабочего инструмента. В предпочтительном варианте осуществления результаты измерения получают с использованием схемы выборки сигнала, работающей синхронно по отношению к частоте РЧ сигнала возбуждения. Частота, с которой схема выборки сигнала фиксирует контрольный сигнал, может являться целой частью частоты РЧ сигнала возбуждения.
В одном варианте осуществления схема управления изменяет частоту РЧ сигнала возбуждения в окрестности (предпочтительно лишь несколько выше или несколько ниже) резонансной частоты резонансной цепи. Резонансные характеристики резонансной цепи могут изменяться в зависимости от нагрузки, подключенной к по меньшей мере одному электрическому контакту, и схема управления может быть организована таким образом, чтобы изменять частоту РЧ сигнала возбуждения для отслеживания изменений в резонансных характеристиках резонансной цепи.
В соответствии с другим аспектом в настоящем изобретении предложено медицинское устройство, содержащее: рукоятку для захвата рукой пользователя; рабочий инструмент, соединенный с рукояткой и имеющий по меньшей мере один электрический контакт; схему радиочастотного (РЧ) генератора, выполненную с возможностью выработки РЧ сигнала возбуждения и подачи РЧ сигнала возбуждения на по меньшей мере один электрический контакт; и схему управления, выполненную с возможностью изменения частоты РЧ сигнала возбуждения для регулирования по меньшей мере одного из следующих параметров: мощности, напряжения и силы тока, выдаваемых на по меньшей мере один контакт рабочего инструмента.
Схема РЧ генератора может содержать генератор сигнала, вырабатывающий периодически изменяющийся сигнал на требуемой радиочастоте; и частотно-зависимый аттенюатор, который ослабляет периодически изменяющийся сигнал в зависимости от частоты периодически изменяющегося сигнала. Частотно-зависимый аттенюатор может представлять собой аттенюатор без потерь и может содержать резонансную цепь с резонансной частотой, равной или близкой частоте периодически изменяющегося РЧ сигнала.
В настоящем изобретении также предложено медицинское устройство, содержащее: рукоятку для захвата рукой пользователя; рабочий инструмент, соединенный с рукояткой и имеющий по меньшей мере один электрический контакт; схему радиочастотного (РЧ) генератора, выполненную с возможностью выработки РЧ сигнала возбуждения и подачи РЧ сигнала возбуждения на по меньшей мере один электрический контакт; вход для введения контрольного сигнала, который изменяется одновременно с РЧ сигналом возбуждения, приложенным к по меньшей мере одному электрическому контакту; схему выборки сигнала для выборки величины контрольного сигнала, подведенного к указанному входу; схему измерения, выполненную с возможностью измерения величины РЧ сигнала возбуждения с использованием зафиксированных сигналов с выхода схемы выборки сигнала; и схему управления, выполненную с возможностью управления схемой РЧ генератора в зависимости от результатов измерения, полученных схемой измерения, для изменения частоты вырабатываемого РЧ сигнала возбуждения; причем схема выборки сигнала выполнена с возможностью выборки величины контрольного сигнала с частотой выборки, которая изменяется синхронно с частотой РЧ сигнала возбуждения.
В настоящем изобретении также предложен способ использования медицинского устройства, включающий выработку РЧ сигнала и приложение РЧ сигнала к по меньшей мере одному электроду рабочего инструмента медицинского устройства, и управление частотой генерируемого РЧ сигнала для регулирования по меньшей мере одного из следующих параметров: мощности, силы тока и напряжения, приложенных к по меньшей мере одному электроду.
В соответствии с другим аспектом в настоящем изобретении предложен способ прижигания сосуда или ткани, включающий: захват сосуда или ткани с помощью рабочего инструмента медицинского устройства; приложение РЧ сигнала к по меньшей мере одному электроду рабочего инструмента, который находится в контакте с сосудом или тканью; и управление частотой РЧ сигнала для регулирования по меньшей мере одного из следующих параметров: мощности, силы тока и напряжения, приложенных к ткани, для проведения прижигания.
Указанные выше способы могут включать применение описанного выше медицинского устройства, однако это не является необходимым условием.
На стадии управления может варьироваться частота РЧ сигнала для регулирования прикладываемой к сосуду или ткани мощности, и способ может дополнительно включать измерение импеданса ткани или сосуда и варьирование требуемой мощности, прикладываемой к сосуду или ткани, в зависимости от результатов измерения импеданса.
Перечисленные и различные иные отличительные особенности и аспекты настоящего изобретения станут очевидны после изучения приведенного ниже подробного описания вариантов осуществления настоящего изобретения в сочетании с сопутствующими фигурами.
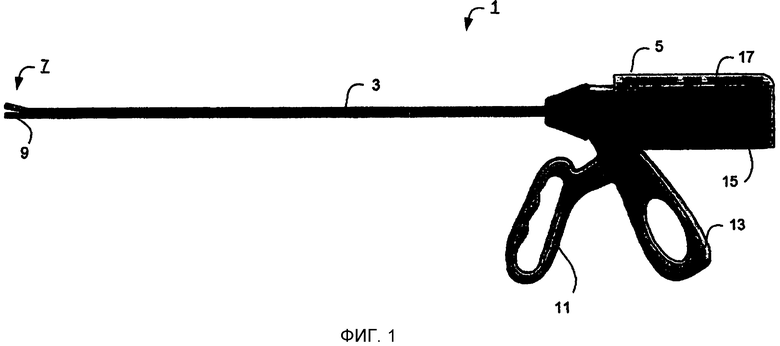
На фиг.1 представлено ручное устройство для прижигания, которое имеет аккумуляторные батареи и силовые и управляющие электронные компоненты, установленные в рукоятке устройства.
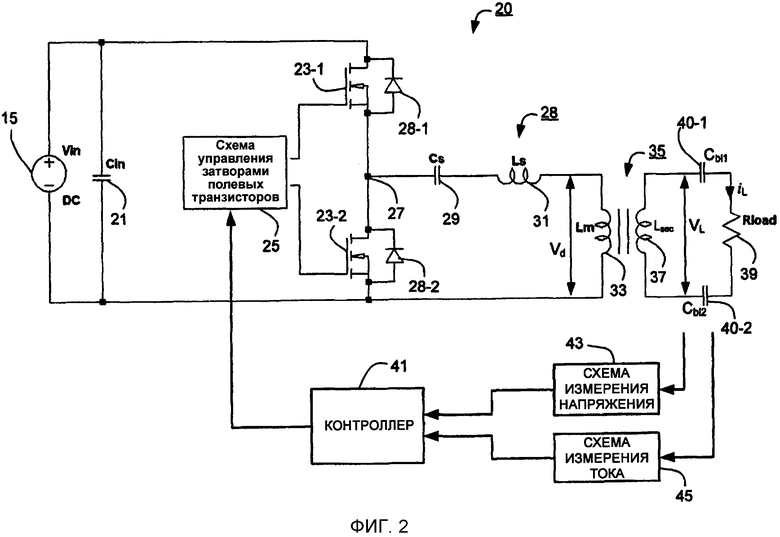
На фиг.2 представлена принципиальная блок-схема с указанием основных компонентов схемы генерации напряжения РЧ возбуждения и схемы управления, применяемых в одном варианте осуществления настоящего изобретения.
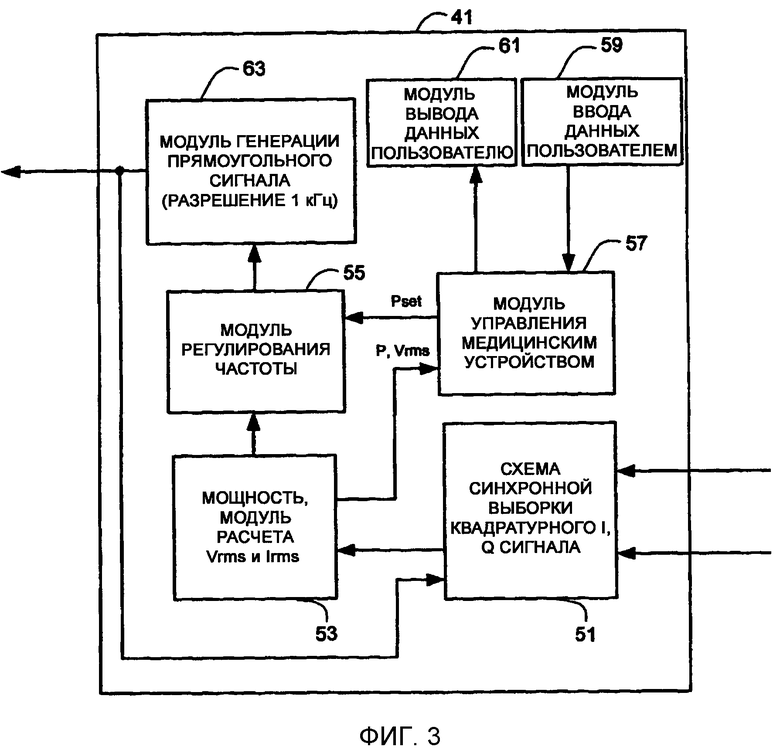
На фиг.3 представлена блок-схема с указанием основных компонентов контроллера, используемого для управления работой схемы генерации напряжения РЧ возбуждения, приведенной на фиг.2.
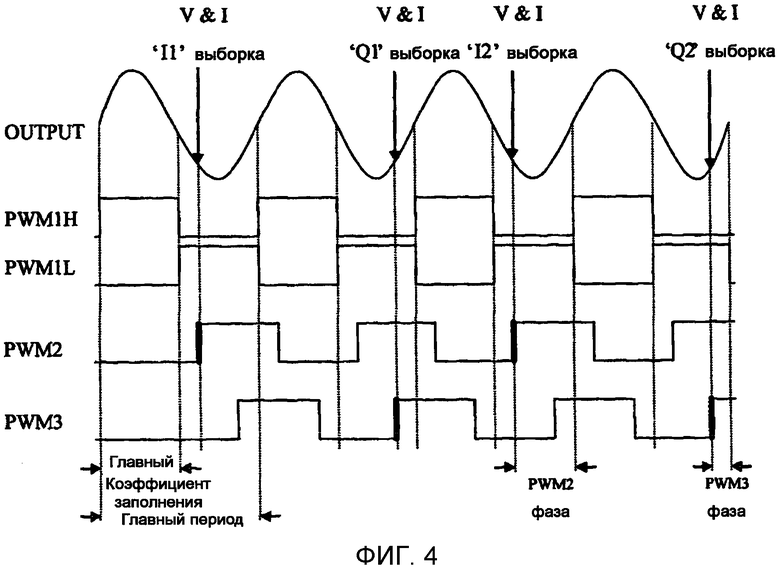
На фиг.4 представлена временная диаграмма с указанием РЧ сигналов возбуждения, подаваемых на устройство для прижигания, иллюстрирующая способ получения синхронных выборок для измерения параметров сигналов возбуждения.
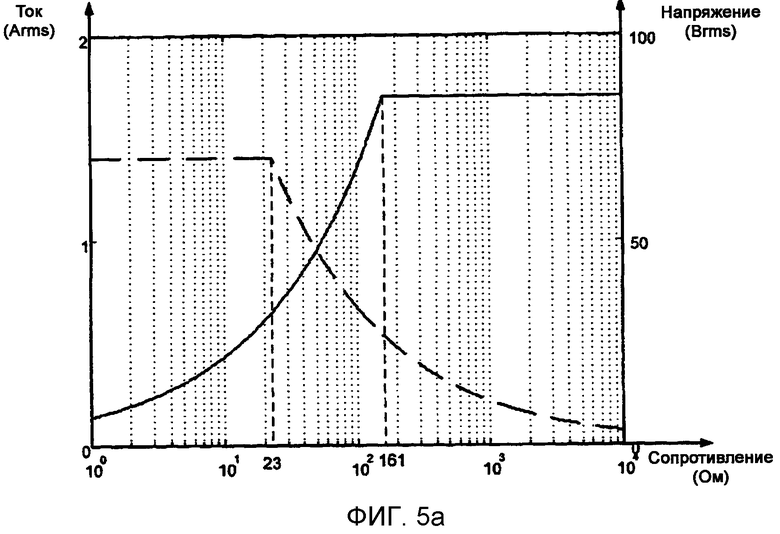
На фиг.5a представлен график с указанием пределов изменения напряжений и токов, подаваемых на устройство для прижигания, показанное на фиг.1.
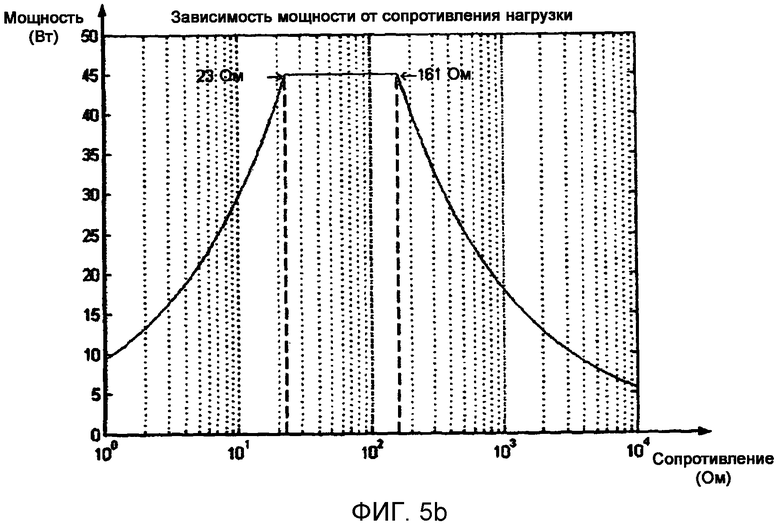
На фиг.5b представлен график рассчитанной выходной мощности, полученный по графикам тока и напряжения, показанным на фиг.5a.
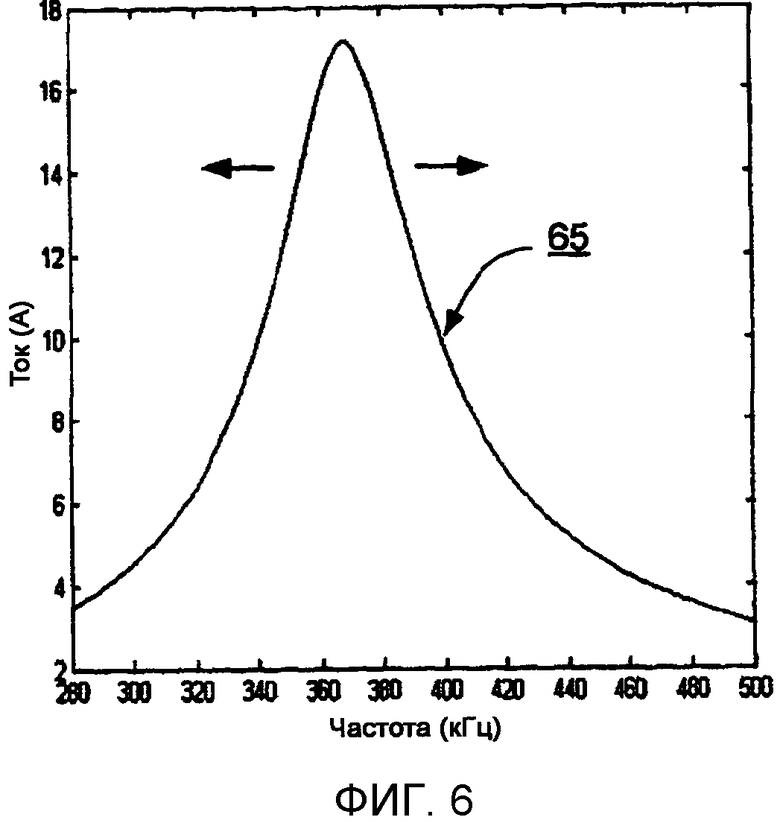
На фиг.6 представлен график, иллюстрирующий изменение резонансных характеристик показанной на фиг.2 схемы генерации напряжения РЧ возбуждения при изменении нагрузки.
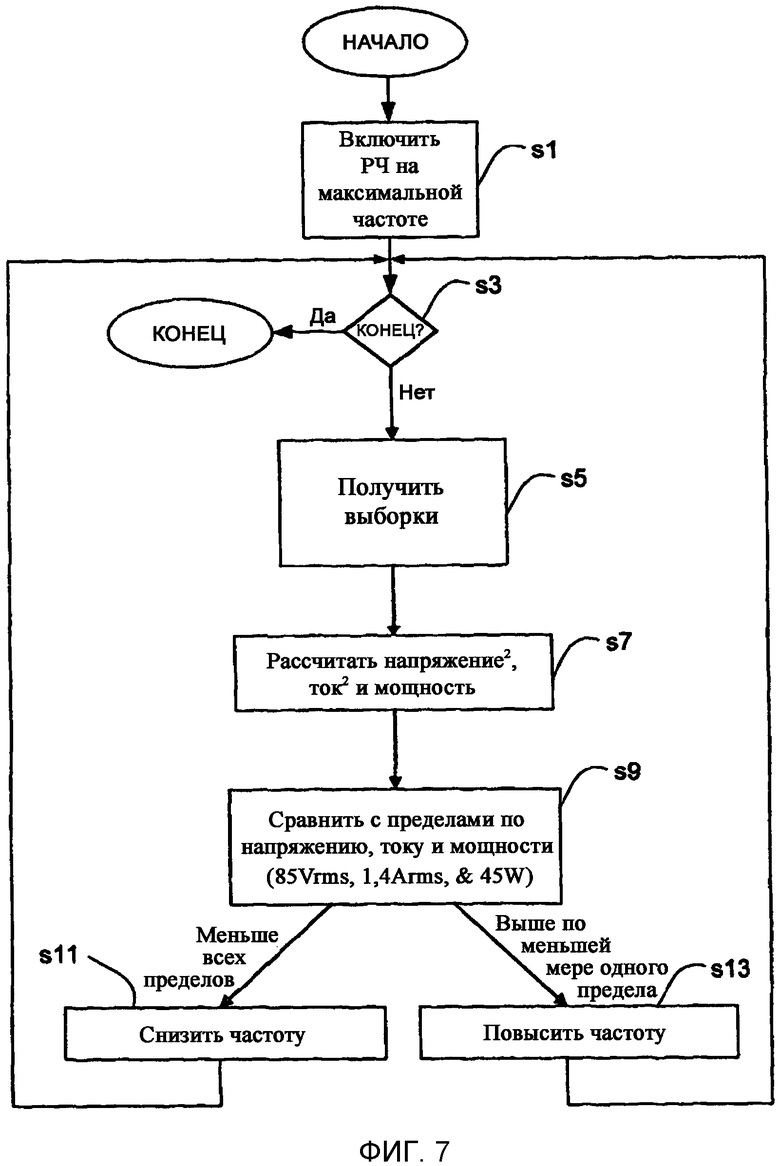
На фиг.7 представлена логическая схема, иллюстрирующая работу алгоритма управления частотой, применяемого для управления частотой РЧ сигналов возбуждения, подаваемых на устройство для прижигания.
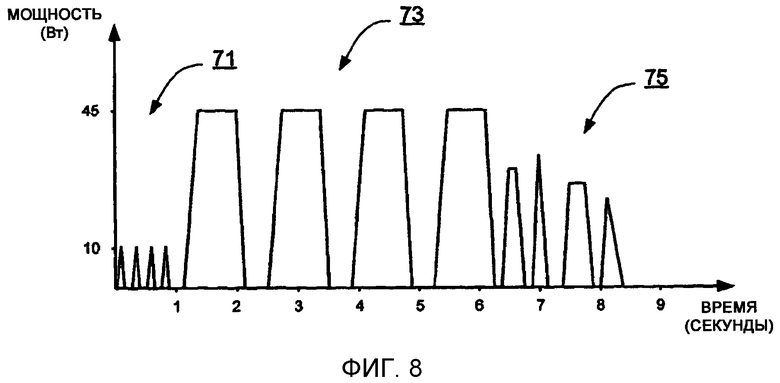
На фиг.8 представлен график, иллюстрирующий один способ изменения управляющими электронными компонентами пределов выходной мощности в ходе выполнения хирургической процедуры.
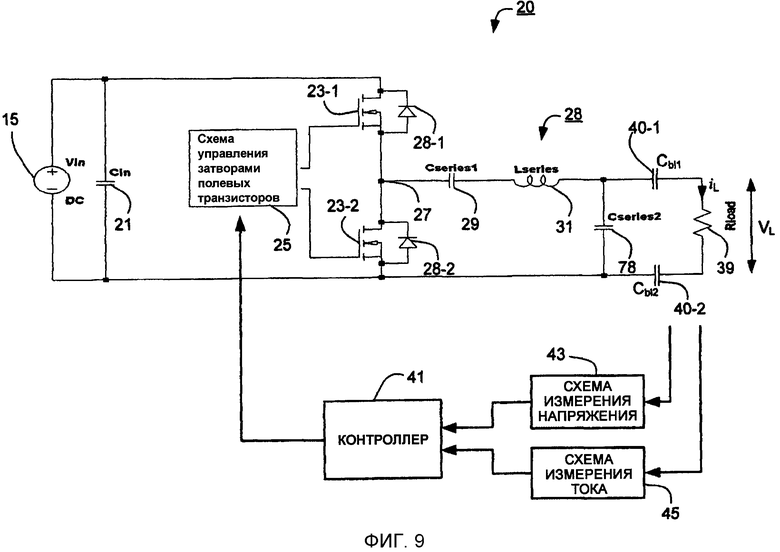
На фиг.9 представлена принципиальная блок-схема с указанием основных компонентов схемы генерации напряжения РЧ возбуждения и схемы управления, применяемых в другом варианте осуществления настоящего изобретения.
На фиг.10 представлена форма известного из предшествующего уровня техники ручного устройства для прижигания, которое соединяется с силовыми и управляющими электронными компонентами электрическим кабелем.
На фиг.11 представлен вид сверху с указанием различных компонентов существующих электронных модулей, используемых для обеспечения функциональности и управления ручным устройством для прижигания, показанным на фиг.10.
Медицинское устройство
Многие хирургические процедуры требуют рассечения или лигирования кровеносных сосудов или иных сосудистых тканей. При использовании подходов минимально инвазивной хирургии хирург выполняет хирургические процедуры через небольшой разрез на теле пациента. В результате ограничения доступного пространства хирурги нередко сталкиваются с трудностями при остановке кровотечений путем пережимания и/или перетягивании рассеченных кровеносных сосудов. Используя электрохирургические щипцы, хирург может прижечь, коагулировать/высушить и/или просто ослабить или остановить кровотечение путем регулирования используемой для электрохирургической процедуры энергии, подаваемой через бранши электрохирургических щипцов.
На фиг.1 представлена форма электрохирургического медицинского устройства 1, выполненного с возможностью осуществления минимально инвазивных медицинских операций в соответствии с одним вариантом осуществления настоящего изобретения. Как показано на фигуре, устройство 1 представляет собой автономное устройство, имеющее удлиненный вал 3 с рукояткой 5, соединенной с проксимальным концом вала 3, и рабочим инструментом 7, соединенным с дистальным концом вала 3. В данном варианте осуществления рабочий инструмент 7 содержит медицинские щипцы 9 и рассекающее лезвие (на фигуре не показано), которыми управляет пользователь путем манипуляции рычагами управления 11 и 13 на рукоятке 5.
При проведении хирургической процедуры вал 3 вводят через троакар для получения доступа к внутренним органам пациента и операционному полю. Хирург корректирует положение щипцов 9 с помощью рукоятки 5 и рычагов управления 11 и 13 до тех пор, пока щипцы 9 не окажутся вокруг требующего прижигания сосуда. Затем на щипцы 9 контролируемым образом подают энергию в форме РЧ напряжения (обнаружено, что частота выше приблизительно 50 кГц не оказывает воздействия на нервную систему человека), обеспечивая требуемое прижигание. Как показано на фиг.1, в данном варианте осуществления в рукоятке 5 размещаются аккумуляторные батареи 15 и управляющие электронные компоненты 17 для выработки и регулирования электрической энергии, требуемой для проведения прижигания. Таким образом, устройство 1 является автономным в том смысле, что оно не требует отдельного блока управления и электрического кабеля для подачи электрической энергии на щипцы 9.
Схема генерации напряжения РЧ возбуждения
На фиг.2 представлена принципиальная блок-схема, иллюстрирующая схему 20 генерации напряжения РЧ возбуждения и схему управления, применяемые в данном варианте осуществления для выработки и регулирования РЧ электрической энергии, подаваемой в щипцы 9. Как будет более подробно описано ниже, в данном варианте осуществления схема 20 генерации напряжения возбуждения представляет собой резонансную цепь, а схема управления обеспечивает управление рабочей частотой сигнала возбуждения таким образом, что она изменяется в окрестности резонансной частоты схемы генерации напряжения возбуждения, что в свою очередь регулирует мощность, подаваемую на щипцы 9. Способ, которым это достигается, станет понятным из приведенного ниже описания.
Как показано на фиг.2, схема 20 генерации напряжения возбуждения содержит описанные выше аккумуляторные батареи 15, которые в данном примере выполнены с возможностью подачи напряжения на шинах 0 В и 24 В. Между шинами 0 В и 24 В включен входной конденсатор (Cin) 21, обеспечивающий низкий импеданс источника напряжения. Пара переключателей на полевых транзисторах 23-1 и 23-2 (которые в данном варианте осуществления оба являются N-канальными для снижения потерь мощности) включены последовательно между шинами 0 В и 24 В. Имеется схема 25 управления затворами полевых транзисторов, которая вырабатывает два сигнала возбуждения - по одному для управления каждым из полевых транзисторов 23. Схема 25 управления затворами полевых транзисторов вырабатывает такие сигналы возбуждения, что верхний полевой транзистор (23-1) оказывается открытым, когда нижний полевой транзистор (23-2) оказывается закрытым, и наоборот. Это приводит к попеременному подключению точки 27 к шине 24 В (при открытом полевом транзисторе 23-1) и шине 0 В (при открытом полевом транзисторе 23-2). На фиг.2 также показаны внутренние паразитные диоды 28-1 и 28-2 соответствующих полевых транзисторов 23, которые оказываются в проводящем состоянии в любой момент, когда полевые транзисторы 23 открыты.
Как показано на фиг.2, точка 27 подключена к резонансной цепи 28 типа конденсатор-индуктивность-индуктивность, образованной конденсатором Cs 29, катушкой индуктивности Ls 31 и катушкой индуктивности Lm 33. Схема 25 управления затворами полевых транзисторов выполнена с возможностью вырабатывать сигналы возбуждения с такой частотой возбуждения (fd), что переключатели на полевых транзисторах 23 открываются и закрываются с частотой, близкой к резонансной частоте резонансной цепи 28. В результате резонансного характера резонансной цепи 28 прямоугольное напряжение в точке 27 приведет к протеканию через резонансную цепь 28 по существу синусоидального тока на частоте возбуждения (fd). Как показано на фиг.2, катушка индуктивности Lm 33 представляет собой первичную обмотку трансформатора 35, вторичная обмотка которого образована катушкой индуктивности Lsec 37. Трансформатор 35 повышает напряжение возбуждения (Vd) на катушке индуктивности Lm 33 до напряжения на нагрузке (VL), которое прикладывается к нагрузке (показанной на фиг.2 как нагрузочное сопротивление Rload 39) и соответствует импедансу браншей щипцов и ткани или сосуда, захваченных в щипцы 9. Как показано на фиг.2, в схеме имеется пара разделительных конденсаторов в сети постоянного тока Cbl 40-1 и 40-2, защищающих нагрузку 39 от попадания на нее постоянного напряжения.
В данном варианте осуществления количество электрической энергии, подаваемой на щипцы 9, регулируется путем изменения частоты сигналов переключения, управляющих включением и выключением полевых транзисторов 23. Успешность такого принципа управления основана на том, что резонансная цепь 28 выполняет функцию частотно-зависимого аттенюатора (без потерь). Чем ближе оказывается частота сигнала возбуждения к резонансной частоте резонансной цепи 28, тем меньше ослабляется сигнал возбуждения. Аналогичным образом, при удалении частоты сигнала возбуждения от резонансной частоты цепи 28 сигнал возбуждения все больше и больше ослабляется, что приводит к уменьшению подаваемой в нагрузку мощности. В данном варианте осуществления частота переключающих сигналов, вырабатываемых схемой 25 управления затворами полевых транзисторов, регулируется контроллером 41, исходя из мощности, которую требуется передать в нагрузку 39, и результатов измерения напряжения на нагрузке (VL) и тока в нагрузке (iL), полученных с использованием стандартных схем измерения напряжения 43 и измерения тока 45. Принцип работы контроллера 41 будет более подробно описан ниже.
Контроллер
На фиг.3 представлена блок-схема основных компонентов контроллера 41. В данном варианте осуществления контроллер 41 представляет собой контроллер на основе микропроцессора, поэтому большая часть показанных на фиг.3 компонентов реализована программно. Однако вместо него можно использовать аппаратный контроллер 41. Как показано на фигуре, контроллер 41 включает в себя схему синхронной выборки квадратурного I, Q сигнала 51, на которую поступают сигналы измеренных напряжения и тока от схем измерения 43 и 45 и которая формирует соответствующие выборки сигналов, поступающие далее в модуль 53 расчета мощности и среднеквадратичных величин Vrms и Irms. Модуль 53 расчета использует сформированные выборки сигналов для расчета среднеквадратичных величин напряжения и тока, приложенных к нагрузке 39 (щипцы 9 с захваченными между ними тканью/сосудом), и по ним рассчитывают мощность, подаваемую в данный момент времени в нагрузку 39. Рассчитанные величины затем передаются в модуль 55 управления частотой и в модуль 57 управления медицинским устройством. Модуль 57 управления медицинским устройством использует полученные значения для определения текущего импеданса нагрузки 39 и на основе данного определенного импеданса и заранее заданного алгоритма определяет установленный уровень мощности (Pset), который должен быть передан модулю 55 управления частотой. Модуль 57 управления медицинским устройством, в свою очередь, управляется сигналами, полученными из модуля 59 ввода данных пользователем, который принимает входные данные от пользователя (например, путем нажатия кнопок или перемещения рычагов управления 11 или 13 на рукоятке 5) и также управляет имеющимися в рукоятке 5 устройствами вывода (световыми индикаторами, дисплеем, динамиком и т.п.) через модуль 61 вывода данных пользователю.
Модуль 55 управления частотой использует величины, полученные из модуля 53 расчета, и установленный уровень мощности (Pset), полученный из модуля 57 управления медицинским устройством, а также предварительно установленные системные пределы (более подробно описанные далее) для определения того, требуется ли повысить или понизить частоту возбуждения. Принятое решение затем передается в модуль 63 генерации прямоугольного сигнала, который, в данном варианте осуществления, увеличивает или уменьшает частоту генерируемого прямоугольного сигнала с шагом 1 кГц в зависимости от поступившего в него решения. Как определят специалисты в данной области, в альтернативном варианте осуществления модуль 55 управления частотой может определять не только необходимость повышения или понижения частоты, но также и величину требуемого изменения частоты. В данном случае модуль 63 генерации прямоугольного сигнала генерирует соответствующий прямоугольный сигнал с требуемым сдвигом по частоте. В данном варианте осуществления прямоугольный сигнал, генерируемый модулем 63 генерации прямоугольного сигнала, подается на схему 25 управления затворами полевых транзисторов, в которой сигнал усиливается и затем подается на полевой транзистор 23-1. Схема 25 управления затворами полевых транзисторов также инвертирует сигнал, подаваемый на полевой транзистор 23-1, и подает инвертированный сигнал на полевой транзистор 23-2.
Сигналы возбуждения и измерение сигналов
На фиг.4 представлен график сигналов с указанием сигналов переключения полевых транзисторов 23; синусоидального сигнала, соответствующего измеренному току или напряжению на нагрузке 39; и временные диаграммы выборки сигналов напряжения на нагрузке и тока в нагрузке при работе схемы 51 синхронной выборки сигнала. В частности, на фиг.4 показан сигнал переключения (обозначенный PWM1H), поступающий на верхний полевой транзистор 23-1, и сигнал переключения (обозначенный PWM1L), поступающий на нижний полевой транзистор 23-2. Хотя для простоты это опущено на фигуре, между сигналами PWM1H и PWM1L имеется некоторое мертвое время во избежание одновременного открытия обоих полевых транзисторов 23. На фиг.4 также показаны измеренные напряжение/ток нагрузки (обозначенные OUTPUT). И напряжение на нагрузке, и ток в нагрузке будут иметь синусоидальную форму, хотя они могут быть сдвинуты по фазе в зависимости от импеданса нагрузки 39. Как показано на фигуре, напряжение на нагрузке и ток в нагрузке имеют ту же частоту возбуждения (fd), что и сигналы переключения полевых транзисторов 23 (PWM1H и PWM1L). Обычно при выборке значений для синусоидального сигнала необходимо определять величину сигнала с частотой, по меньшей мере вдвое превышающей частоту анализируемого сигнала, т.е. производить по меньшей мере две выборки за период. Однако поскольку контроллеру 41 известна частота сигналов переключения, схема 51 синхронной выборки сигнала может производить выборку измеряемого сигнала напряжения/тока с меньшей частотой. В данном варианте осуществления схема 51 синхронной выборки сигнала производит выборку измеряемого сигнала один раз за период, но при разной фазе в соседних периодах. На фиг.4 это показано как выборка «I» и выборка «Q». Моменты времени, в которые схема 51 синхронной выборки сигнала производит указанные выборки, в данном варианте осуществления определяются двумя сигналами управления PWM2 и PWM3, которые имеют неподвижную фазу относительно сигналов переключения (PWM1H и PWM1L) и сдвинуты по фазе относительно друг друга (предпочтительно на четверть периода, поскольку это облегчает дальнейшие вычисления). Как показано на фигуре, схема 51 синхронной выборки сигнала производит выборку сигнала «I» по каждому переднему фронту сигнала PWM2, и схема 51 синхронной выборки сигнала производит выборку сигнала «Q» по каждому переднему фронту сигнала PWM3. Схема 51 синхронной выборки сигнала генерирует сигналы управления PWM2 и PWM3 из прямоугольного выходного сигнала, получаемого с генератора 63 прямоугольного сигнала (который имеет ту же частоту, что сигналы переключения PWM1H и PWM1L). Поэтому при изменении частоты сигналов переключения частота сигналов управления выборкой PWM2 и PWM3 также изменяется (при этом их относительные фазы не изменяются). Таким образом, схема 51 выборки сигнала непрерывно изменяет моменты выборки измеряемых сигналов напряжения и тока при изменении частоты сигнала возбуждения так, что выборки сигнала всегда производятся в один и тот же момент времени относительно периода сигнала возбуждения. Поэтому схема 51 выборки сигнала осуществляет «синхронную» выборку сигнала в отличие от более привычного режима работы, когда выборка входного сигнала производится просто на фиксированной частоте, задаваемой генератором фиксированной тактовой частоты.
Формируемые схемой 51 синхронной выборки сигнала выборки затем поступают в модуль 53 расчета мощности и среднеквадратичных величин напряжения Vrms и тока Irms, который может определить амплитуду и фазу измеряемого сигнала всего по одной выборке «I» и одной выборке «Q» сигнала тока в нагрузке и напряжения на нагрузке. Однако в данном варианте осуществления для достижения некоторого усреднения модуль 53 расчета производит усреднение последовательных выборок «I» для получения средней величины сигнала «I» и последовательных выборок сигнала «Q» для получения средней величины сигнала «Q»; и затем использует усредненные величины сигналов I и Q для определения амплитуды и фазы измеряемого сигнала (стандартным образом). Как определят специалисты в данной области, при частоте возбуждения приблизительно 400 кГц и одной выборке за период схема 51 синхронной выборки сигнала должна обеспечивать частоту выборки 400 кГц, и модуль 53 расчета будет выдавать меру текущего напряжения и меру текущего тока каждые 0,01 мс. Принцип работы схемы 51 синхронной выборки сигнала дает преимущество по отношению к существующим продуктам, в которых измерения не могут проводиться с той же частотой, и где доступна только информация об амплитуде измеряемого сигнала (информация о фазе теряется).
Пределы
Как и для любой системы, имеются некоторые ограничения, которые могут накладываться на величины мощности, напряжения и тока, подаваемых на щипцы 9. Ниже описаны используемые в данном варианте осуществления пределы и способы их регулирования.
В данном варианте осуществления схема 20 генерации напряжения РЧ возбуждения выполнена с возможностью обеспечивать подачу на ткань ограниченного по мощности синусоидального сигнала со следующими требованиями:
1) питание осуществляется от источника постоянного тока с номинальным напряжением 24 В;
2) по существу синусоидный выходной сигнал с частотой приблизительно 400 кГц;
3) уровень выходной мощности ограничен величиной 45 Вт;
4) среднеквадратичные уровни выходного тока и напряжения ограничены величинами 1,4 Arms и 85 Brms соответственно.
Последние два требования представлены графически на фиг.5a и 5b. В частности, на фиг.5a показаны идеализированные графики напряжения и тока для сопротивления нагрузки от 1 Ом до 10 кОм в логарифмическом масштабе; а на фиг.5b показана мощность, передаваемая в нагрузку 39 при сопротивлении нагрузки от 1 Ом до 10 кОм.
Модуль 55 управления частотой хранит в памяти данные, определяющие указанные пределы, и использует их для управления принятием решения о повышении или понижении частоты возбуждения.
Резонансная характеристика и управление частотой
Как указано выше, количество электрической энергии, подаваемой на щипцы 9, регулируется путем изменения частоты сигналов переключения, управляющих включением и выключением полевых транзисторов 23. Это достигается путем использования того факта, что импеданс резонансной цепи 28 стремительно изменяется при изменении частоты. Поэтому, изменяя частоту сигналов переключения, можно регулировать амплитуду тока, протекающего через резонансную цепь 28 и тем самым через нагрузку 39, регулируя таким образом уровень выходной мощности.
Как определят специалисты в данной области, резонансная цепь 28 связана с нагрузкой 39, импеданс которой изменяется в ходе проведения хирургической процедуры. Модуль 57 управления медицинским устройством действительно использует это изменение для определения того, завершено ли прижигание, коагулирование или высушивание ткани или сосуда. Изменяющийся импеданс нагрузки 39 приводит к изменению частотной характеристики схемы 20 генерации напряжения РЧ возбуждения и тем самым тока, протекающего через резонансную цепь 28. Это отражено на фиг.6, где приведен график 65, показывающий изменение тока через резонансную цепь 28 при изменении частоты возбуждения для фиксированного импеданса нагрузки. При увеличении импеданса нагрузки 39 резонансная характеристика 65 изменит форму (высота максимума может возрасти или уменьшиться) и сместится влево, а при уменьшении импеданса нагрузки резонансная характеристика изменит форму и сместится вправо. Поэтому модуль 55 управления частотой должен работать достаточно быстро для отслеживания изменения резонансной характеристики 65. Это требование легко удовлетворяется в данном варианте осуществления, где новые результаты измерения мощности, напряжения и тока поступают каждые 0,01 мс. В обычных условиях для отслеживания изменений достаточно проводить измерения с частотой всего раз в 0,1 с. Однако возможны резкие изменения резонансной характеристики 65, которые не может отследить модуль 55 управления частотой. В этом случае модуль 55 управления частотой устанавливает рабочую частоту равной заранее заданному значению, которое гарантированно находится на одном из крыльев резонансной характеристики.
Поскольку импеданс резонансной цепи 28 резко возрастает как выше, так и ниже резонанса, схема 20 генерации напряжения РЧ возбуждения может работать либо выше, либо ниже резонансной частоты. В данном варианте осуществления модуль 55 управления частотой регулирует работу схемы 20 генерации напряжения возбуждения таким образом, что она работает на частоте, несколько превышающей резонансную частоту, поскольку это должно привести к меньшим потерям мощности при переключении полевых транзисторов 23.
На фиг.7 показан алгоритм работы, реализуемый в данном варианте осуществления модулем 53 расчета и модулем 55 управления частотой. Как показано на фигуре, в начале процесса, на стадии s1, модуль 55 управления включает РЧ сигнал возбуждения на максимально возможной в соответствии с настройками системы частоте путем подачи сигнала инициализации модулю 63 генерации прямоугольного сигнала. Если на стадии s3 модуль 55 управления не получил сигнала отключения мощности от модуля 57 управления медицинским устройством, алгоритм переходит к стадии s5, на которой модуль 53 расчета получает выборки сигналов напряжения и тока из схемы 51 синхронной выборки сигнала. На стадии s7 модуль 53 расчета вычисляет квадрат напряжения и квадрат тока, а также подаваемую в нагрузку мощность, умножая величину измеренного напряжения на величину измеренного тока. Рассчитанные значения затем передаются в модуль 55 управления частотой, который на стадии s9 сравнивает полученные значения с заданными пределами для приложенных напряжения, тока и мощности. Пределы по напряжению и току являются статическими пределами, которые устанавливаются заранее. Однако предел по мощности зависит от медицинской процедуры и определяется установленным уровнем мощности (Pset), получаемым из модуля 57 управления медицинским устройством. Если каждая из измеренных величин находится ниже установленного для нее предельного значения, то на стадии s11 модуль 55 управления частотой принимает решение о снижении частоты возбуждения, и в генератор 63 прямоугольного сигнала поступает команда понижения частоты. В начале работы алгоритма частота возбуждения устанавливается равной установленному максимальному значению (в данном варианте осуществления 500 кГц), которое всегда окажется выше частоты резонансного максимума на характеристике 65 при любом импедансе нагрузки. Поэтому, независимо от характеристик нагрузки 39, начальная рабочая частота всегда должна попадать в правую часть резонансной кривой, показанной на фиг.6. При понижении частоты возбуждения частота возбуждения будет постепенно приближаться к резонансной частоте резонансной цепи 28. В результате поступающий в нагрузку 39 ток увеличивается, и уровень подаваемой в нее мощности возрастает. Затем алгоритм возвращается к стадии s3, и описанная выше процедура повторяется.
Поэтому подаваемые в нагрузку 39 ток и мощность должны возрастать до достижения одного из предельных значений. На этом этапе модуль 55 управления определит, на стадии s9, что достигнут установленный предел, и перейдет к стадии s13, на которой модуль 55 управления принимает решение о повышении частоты сигнала возбуждения и выдает модулю 63 генерации прямоугольного сигнала команду повышения частоты. В результате этого произойдет отклонение частоты возбуждения от резонансной частоты цепи 28 и снижение поступающих в нагрузку 39 тока и мощности. Затем алгоритм возвращается к стадии s3, как указано ранее.
Таким образом, начиная работу с одной стороны резонансного максимума и медленно двигая частоту возбуждения в направлении к резонансному максимуму и от него, можно регулировать подаваемые в нагрузку 39 ток и мощность в рамках установленных пределов даже при изменяющемся импедансе нагрузки и изменяющейся резонансной характеристике 65 резонансной цепи 28 в процессе прижигания ткани/сосуда.
Как определят специалисты в данной области, также возможно начинать работу с левой стороны резонансного максимума и повышать частоту возбуждения для увеличения уровня подводимой мощности, и понижать частоту возбуждения для снижения уровня подводимой мощности.
Модуль управления медицинским устройством
Как указано выше, модуль 57 управления медицинским устройством осуществляет общее управление работой устройства для прижигания 1. Он получает вводимые пользователем данные через модуль 59 ввода данных пользователем. Эти данные могут указывать на то, что бранши щипцов 9 ухватили сосуд или ткань и что пользователь хочет начать процесс прижигания. В ответ на это в данном варианте осуществления модуль 57 управления медицинским устройством запускает процесс управления процедурой прижигания. Сначала модуль 57 управления медицинским устройством выдает сигнал инициализации модулю 55 управления частотой и получает результаты измерения тока и мощности от модуля 53 расчета. Затем модуль 57 управления медицинским устройством проверяет полученные значения для подтверждения того, что нагрузка 39 не представляет собой замкнутую накоротко или разомкнутую цепь. В таком случае модуль 57 управления медицинским устройством начинает изменять уровень установленной мощности для проведения требуемой процедуры прижигания. На фиг.8 представлен график, показывающий, как модуль 57 управления медицинским устройством может изменять уровень установленной мощности для проведения требуемой процедуры прижигания. Также могут использоваться и другие различные способы и алгоритмы подачи энергии.
Как показано на фиг.8, в течение начального интервала 71 модуль 57 управления медицинским устройством изменяет уровень установленной мощности импульсами от нуля до приблизительно 10 Вт. Затем в течение основного интервала 73 прижигания (продолжительность которого обычно составляет приблизительно 5 секунд) модуль 57 управления медицинским устройством изменяет уровень установленной мощности импульсами от нуля до 50 Вт. В течение данного интервала модуль управления медицинским устройством получает результаты измерения мощности и напряжения из модуля 53 расчета и рассчитывает из них текущий импеданс нагрузки 39. Модуль 57 управления медицинским устройством определяет момент завершения процедуры прижигания, когда рассчитанный импеданс нагрузки превысит пороговый уровень. Наконец, модуль 57 управления медицинским устройством выполняет процедуру окончания прижигания в течение интервала 75 окончания прижигания. В ходе процедуры окончания прижигания модуль 57 управления медицинским устройством изменяет уровень установленной мощности и проверяет, что прижигание действительно было проведено успешно (проверяя импеданс нагрузки с использованием измеренных величин мощности и тока), и снова переходит к основному интервалу прижигания при обнаружении незавершенности прижигания.
Конструкция резонансной цепи
Ниже описан способ выбора величин индуктивности и емкости в данном варианте осуществления. Специалисты в данной области определят, что возможно использование и других способов проектирования.
Комплексный импеданс показанной на фиг.2 цепи можно приблизительно определить по следующему уравнению:


где:
Rload_ref представляет собой сопротивление нагрузки, приведенное к первичной обмотке (через квадрат отношения числа витков);
Rs представляет собой эквивалентное последовательное сопротивление катушки индуктивности, трансформатора, конденсатора и устройств переключения.
Все остальные неидеальные характеристики компонентов игнорируются, трансформатор в первом приближении считается идеальным.
Полагая Rs малым, при разомкнутой цепи нагрузки (т.е. Rload_ref равном бесконечности) для резонансной частоты контура можно получить следующее уравнение:
Аналогичным образом, при замкнутой накоротко цепи нагрузки (т.е. Rload_ref равном нулю) для резонансной частоты контура можно получить следующее уравнение:
Полагая Rs малым: для каждой частоты в диапазоне от fmin до fmax имеется величина нагрузки, Rload, при которой в нагрузке может быть рассеяна максимальная мощность. Можно увидеть, что данная максимальная мощность велика на частотах вблизи fmin и fmax и имеет минимум на критической частоте fc. Данная мощность обозначена как Pmax_fc. Начиная с уравнения (1), можно показать справедливость следующих соотношений:
где Vs представляет собой напряжение питания.
Можно увидеть, что сопротивление нагрузки, при котором выполняется уравнение (4), дается следующим уравнением:
Кроме того, из уравнения (1) можно определить отношение между fmin, fc и fmax:
Из уравнения (6) можно показать, что fmin<fc<fmax. Если цепь должна работать и при частоте fc, то уравнение (4) дает оценку сверху для мощности, передаваемой в варьируемую нагрузку в самом неблагоприятном случае.
Из уравнения (1) можно показать, что эффективность цепи при резонансе можно записать в следующем виде:

Из уравнения (7) можно показать, что эффективность является максимальной, когда  , т.е. когда выполняется уравнение (5). Поэтому система выполнена с возможностью работы в окрестности точки максимальной эффективности.
, т.е. когда выполняется уравнение (5). Поэтому система выполнена с возможностью работы в окрестности точки максимальной эффективности.
Процедура проектирования
Для данного конкретного варианта осуществления конструкции выбраны следующие параметры:
- напряжение аккумуляторной батареи 24 В, однако напряжение батареи падает при разряде и под нагрузкой, поэтому было принято Vs_sq=18 В (амплитуда от пика до пика прямоугольного сигнала);
- Pload = 45 Вт (максимальная мощность на нагрузке);
- Vload = 85 Brms (максимальное напряжение на нагрузке);
- Iload = 1,4 Arms (максимальный ток в нагрузке);
- fc = 430 кГц (центральная, или критическая, частота переключения);
- fmax = 500 кГц (максимальная частота переключения, наибольшая резонансная частота);
- fmin ≈ 380 кГц (приблизительная минимальная частота переключения, требует расчета).
При данных значения fmin можно рассчитать по уравнению (6):
 .
.
Резонансные цепи выдают синусоидальные сигналы, поэтому необходимо пересчитать напряжение входного прямоугольного сигнала (Vs_sq) в среднеквадратичную величину сигнала на основной частоте сигнала переключения (Vs).
Поступающая в нагрузку мощность (Pload) задается величиной Lm. Величина индуктивности намагничивания трансформатора (Lm) может быть рассчитана по уравнению (4). Это обеспечивает выдачу требуемой мощности на критической частоте fc:
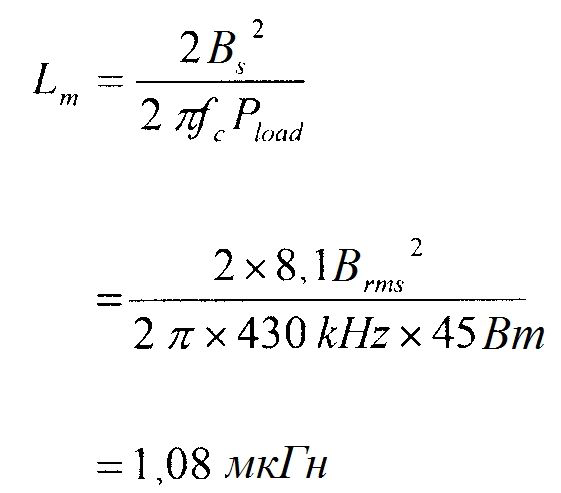 .
.
Затем можно определить величину Ls (на основе уравнений 2 и 3):
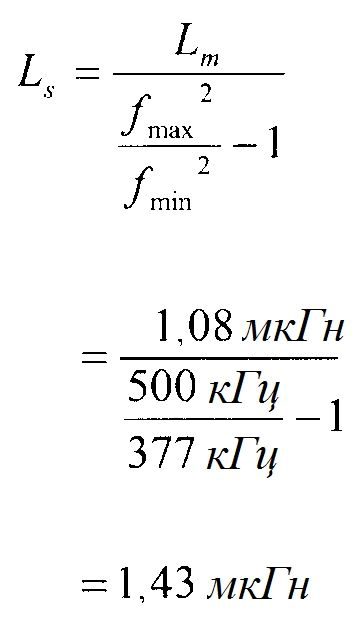 .
.
После этого можно рассчитать величину Cs (из уравнения 3):
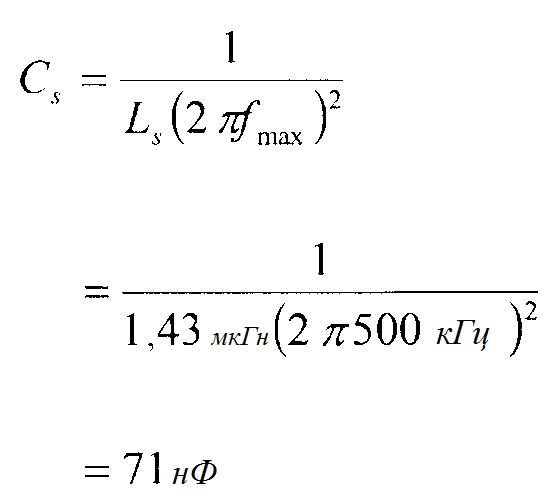 .
.
Для обеспечения стабилизации режима работы цепь используется выше резонансной частоты, поэтому реальные величины Cs, как правило, будут на 20% выше для возвращения рабочей точки обратно вниз (при выборе режима работы ниже резонансной частоты величину Cs следовало бы уменьшить).
Как указано выше, максимальная эффективность достигается при Rload_ref, равном реактивному сопротивлению намагничивания на критической частоте (уравнение 5). Поэтому желательно обеспечить работу приблизительно в центре диапазона постоянной мощности (показанного на фиг.5b). Rload_upper представляет собой сопротивление нагрузки, при котором происходит переключение из режима постоянной мощности в режим постоянного напряжения. Аналогичным образом, Rload_lower представляет собой сопротивление нагрузки, при котором происходит переключение из режима постоянной мощности в режим постоянного тока.
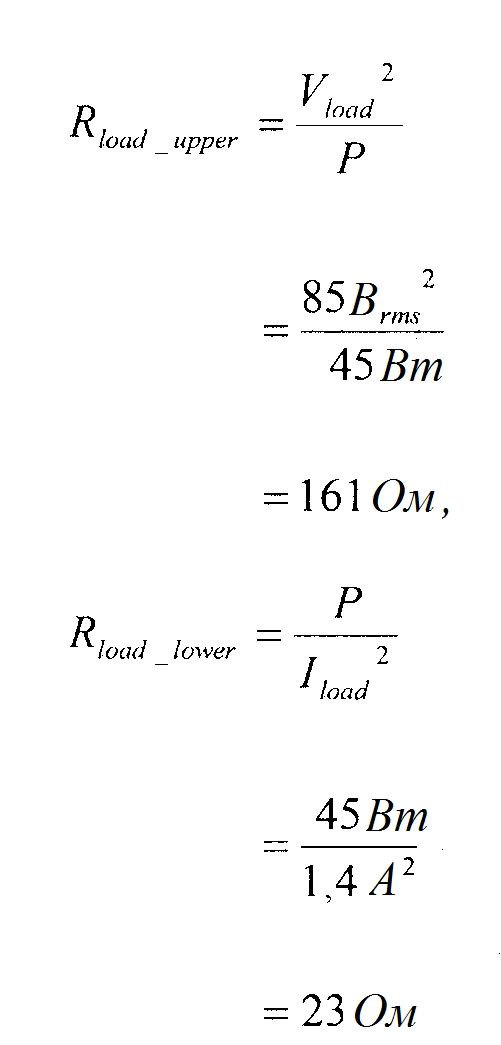 .
.
Для нахождения величины Rload_c (центрального, или критического, сопротивления нагрузки) нужно взять среднее геометрическое этих сопротивлений нагрузки
 .
.
Как обсуждалось выше, величина Rload_ref должна совпадать с импедансом приведенного к первичной обмотке реактивного сопротивления намагничивания на частоте fc. Поэтому величина Rload должна быть равна приведенному ко вторичной обмотке реактивному сопротивлению намагничивания. Таким образом, величину Lsec можно рассчитать следующим образом:
 .
.
Наконец, отношение числа витков в трансформаторе можно рассчитать следующим образом:
Для каждой конкретной конструкции может потребоваться корректировка рассчитанных значений по следующим причинам:
- для максимального повышения эффективности;
- для компенсации неидеальных характеристик используемых компонентов (таких как последовательное сопротивление, паразитная емкость и индуктивность, неидеальные характеристики трансформатора, такие как ненулевая индуктивность рассеяния);
- для получения практически реализуемой конструкции (например, для возможности использования стандартных номиналов конденсаторов и целочисленных величин витков);
- для получения запаса, необходимого для соответствия требованиям в силу допусков номиналов компонентов, их температурной зависимости и т.д.
В данном конкретном варианте осуществления значения компонентов были оптимизированы следующим образом:
Cs=82 нФ,
Lm=1,1 мкГн,
Ls=1,4 мкГн,
N=5, что дает Lsec≈24 мкГн.
В следующих разделах кратко описано, каким образом были физически реализованы эти величины компонентов.
Выбор конденсатора
Для максимального снижения потерь и удержания температуры компонента в допустимых пределах желательно использовать конденсатор с малыми потерями. Наилучшим выбором в данном случае являются керамические конденсаторы, и в данном варианте осуществления были использованы конденсаторы с диэлектриком типа COG/NPO. Большую роль также играет максимально допустимое рабочее напряжение конденсатора, поскольку оно не должно превышаться при любых нагрузках. В данном варианте осуществления были использованы десять параллельно соединенных керамических конденсаторов COG/NPO типоразмера 1206 емкостью 8,2 нФ с рабочим напряжением 250 В.
Катушка индуктивности и трансформатор
В данном варианте осуществления в качестве ферритового сердечника была использована пара ш-образного элемента и перекладины типа Ferroxcube 3F3 E32/6/20. Элементы из материала Ferroxcube 3F3 поставляются компанией Ferroxcube, дочерней компанией Yageo Corporation, Тайвань. Он представляет собой высокочастотный ферритовый материал, оптимизированный для области частот 200-500 кГц. Использование такого материала позволяет свести к минимуму потери в сердечнике. Потери в сердечнике резко возрастают при повышении плотности магнитного потока. В катушке индуктивности для заданного уровня запасаемой энергии плотность магнитного потока возрастает с уменьшением толщины воздушного зазора (воздушный зазор представляет собой промежуток между ш-образным элементом и перекладиной). Поэтому для снижения потерь в сердечнике можно увеличить толщину воздушного зазора и число витков, однако это должно соотноситься с требуемой величиной индуктивности и повышением омических потерь, связанных с увеличением длины проводника.
Те же самые соображения применимы и к конструкции трансформатора, только в данном случае потери в сердечнике связаны с выходным напряжением и с числом витков. Поскольку выходное напряжение в данном случае фиксировано, единственным варьируемым параметром остается число витков, но оно опять должно соотноситься с омическими потерями. После выбора числа витков коррекцией толщины воздушного зазора можно установить требуемую величину Lm. При любом выборе сердечника наилучшим вариантом является максимальное заполнение окна намотки медью для максимального снижения омических потерь. В трансформаторе предпочтительно обеспечить приблизительно одинаковые объемы первичной и вторичной обмоток для балансировки потерь.
Обычно омические потери можно достаточно легко рассчитать, но, поскольку описываемая цепь работает при частоте приблизительно 400 кГц, следует принимать во внимание толщину скин-слоя. Толщина скин-слоя для меди на частоте 400 кГц составляет всего лишь приблизительно 0,1 мм, поэтому при использовании сплошного проводника с диаметром больше указанной величины будет использоваться не вся медь. Для ослабления указанного эффекта может использоваться литцендрат (многожильный сплетенный изолированный медный провод, в котором диаметр каждой жилы меньше толщины скин-слоя). В данном варианте осуществления, чтобы избежать необходимости намотки нестандартных компонентов, для получения обмоток и катушки индуктивности (Ls) и трансформатора использовали печатные проводники на плате с толщиной меди 2 унции (толщина проводников приблизительно 0,07 мм). Катушка индуктивности имеет два витка с воздушным зазором 0,5 мм между ш-образным элементом и перекладиной. Трансформатор имеет первичную обмотку из одного витка и вторичную обмотку из пяти витков с воздушным зазором между ш-образным элементом и перекладиной 0,1 мм.
Модификации и альтернативные решения
Выше было описано медицинское устройство для прижигания. Специалисты в данной области определят, что возможны различные изменения устройства, некоторые из которых описаны ниже. Другие изменения будут очевидными для специалистов в данной области.
В описанном выше варианте осуществления указаны различные значения рабочей частоты, силы тока, мощности и напряжения. Как определят специалисты в данной области, точные величины силы тока, напряжения, частоты, емкости конденсаторов, индуктивности катушек и т.д. могут изменяться в зависимости от приложения, и описанные выше значения ни в коей мере не должны восприниматься как ограничивающие. Однако в целом описанная выше цепь была разработана для подачи возбуждающего РЧ сигнала на медицинское устройство, причем уровень подводимой мощности желательно составляет по меньшей мере 10 Вт и предпочтительно находится в диапазоне от 10 Вт до 200 Вт; уровень прикладываемого напряжение желательно составляет по меньшей мере 20 Brms и предпочтительно находится в диапазоне от 30 Brms до 120 Brms; уровень тока желательно составляет по меньшей мере 0,5 Arms и предпочтительно находится в диапазоне от 1 Arms до 2 Arms; и частота возбуждения составляет по меньшей мере 50 кГц.
В описанном выше варианте осуществления резонансная цепь 28 была образована из элементов конденсатор-индуктивность-индуктивность. Как определят специалисты в данной области, резонансная цепь 28 может иметь различную конструкцию. На фиг.9 показана другая конструкция резонансной цепи, которая может применяться в других вариантах осуществления. В показанной на фиг.9 конструкции резонансная цепь 28 образована из элементов конденсатор-индуктивность-конденсатор, а нагрузка подключается параллельно второму конденсатору 78. Как показано на фигуре, в этой конструкции отсутствует трансформатор, и поэтому отсутствует повышение напряжения. Однако работа данного варианта осуществления аналогична работе описанного выше варианта осуществления, поэтому ее дальнейшее описание опускается. Могут также использоваться другие конструкции резонансных цепей с множеством конденсаторов и катушек индуктивности в различных последовательных и параллельных конфигурациях или более простые резонансные LC-контуры.
На фиг.1 показан один способ крепления аккумуляторных батарей и управляющих электронных компонентов внутри рукоятки медицинского устройства. Как определят специалисты в данной области, форм-фактор рукоятки может иметь различную конструкцию.
В описанном выше варианте осуществления был описан пример алгоритма управления для выполнения прижигания сосуда или ткани, захваченных между браншами щипцов. Как определят специалисты в данной области, возможно использование и различных иных процедур, и читатель отсылается к литературе с описанием функционирования устройств для прижигания за более подробной информацией.
В описанном выше варианте осуществления РЧ сигнал возбуждения, генерируемый схемой возбуждения, непосредственно передавали к двум браншам щипцов медицинского устройства. В альтернативном варианте осуществления сигнал возбуждения может передаваться к одной бранше, при этом возвратный путь или плоскость заземления для сигнала может обеспечиваться отдельным соединением на прижигаемой ткани или сосуде.
В описанных выше вариантах осуществления в качестве электродов медицинского устройства использовали бранши щипцов. В альтернативном устройстве электроды могут быть выполнены отдельно от бранш.
В описанных выше вариантах осуществления для преобразования напряжения постоянного тока, обеспечиваемого аккумуляторными батареями, в сигнал переменного тока на требуемой радиочастоте использовали два переключателя на полевых транзисторах. Как определят специалисты в данной области, использование двух переключателей не является обязательным, вместо этого можно использовать один переключатель или множество переключателей, например, в мостовой конфигурации. Кроме того, хотя были использованы переключатели на полевых транзисторах, вместо них могут использоваться и другие устройства переключения, например, биполярные переключатели. Однако предпочтительным является использование полевых МОП-транзисторов в силу их лучших характеристик в отношении потерь при работе на указанных выше частотах и уровнях сигнала.
В описанном выше варианте осуществления резонансная цепь 28 выполняла функцию частотно-зависимого аттенюатора. Резонансная цепь была разработана как аттенюатор по существу без потерь, однако это не является обязательным условием. В состав резонансной цепи могут также входить элементы с потерями, хотя, конечно, в этом случае эффективность цепи окажется ниже.
В описанном выше варианте осуществления квадратурная схема 51 выборки сигналов I и Q осуществляла выборку измеряемых сигналов напряжения/тока раз в период и объединяла результаты выборок по соседним периодам. Как определят специалисты в данной области, это не является обязательным условием. В силу синхронной природы процесса выборки, при необходимости выборки сигнала могут производиться чаще, чем раз в период или один раз в каждом n-ном периоде. Частота выборки сигнала, используемая в описанном выше варианте осуществления, была выбрана для получения максимальной частоты, с которой модуль 57 управления медицинским устройством может получать результаты измерения, поскольку это обеспечивает более эффективное управление уровнем подаваемой мощности в ходе процесса прижигания.
В описанном выше варианте осуществления использовали источник постоянного тока с напряжением 24 В. В других вариантах осуществления могут использоваться источники постоянного тока с более низким напряжением. В таком случае в трансформаторе может использоваться большее отношение числа витков для повышения напряжения на нагрузке до требуемого уровня, либо могут использоваться более низкие рабочие напряжения.
В описанном выше варианте осуществления для получения результатов измерения напряжения на нагрузке и тока в нагрузке был использован способ синхронной выборки сигнала. Как определят специалисты в данной области, это не является обязательным условием, и вместо этого могут использоваться более привычные способы выборки сигнала.
В описанном выше варианте осуществления медицинское устройство было выполнено с возможностью подведения требуемой мощности к электродам рабочего инструмента. В альтернативном варианте осуществления устройство может быть выполнено с возможностью подведения требуемых тока или напряжения к электродам рабочего инструмента.
В описанном выше варианте осуществления аккумуляторная батарея является неотъемлемой частью медицинского устройства. В альтернативном варианте осуществления аккумуляторную батарею можно закрепить на поясе хирурга или просто установить на стойке Мэйо. В таком варианте осуществления для соединения аккумуляторной батареи с медицинским устройством потребуется относительно тонкий двухпроводной кабель.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2016 |
|
RU2696491C1 |
| Способ функционирования магнитно-резонансного томографа на основе метаповерхности (варианты) | 2021 |
|
RU2776600C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ | 2019 |
|
RU2840846C2 |
| СХЕМА ВОЗБУЖДЕНИЯ НАГРУЗКИ | 2015 |
|
RU2695817C2 |
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА МОЩНОСТИ | 2015 |
|
RU2692482C2 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| СИСТЕМА СВЕТОИЗЛУЧАЮЩИХ УСТРОЙСТВ, СОДЕРЖАЩАЯ ПРИЕМНИК СИГНАЛОВ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ И ВОЗБУДИТЕЛЬ | 2010 |
|
RU2565662C2 |
| УЛЬТРАЗВУКОВОЙ СКАЛЬПЕЛЬ, ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ И СПОСОБ РЕГУЛИРОВАНИЯ ИХ МОЩНОСТИ | 2022 |
|
RU2839580C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ГЕНЕРАТОР ЭНЕРГИИ ДЛЯ ЭЛЕКТРОИМПУЛЬСНОГО ОТКРЫТИЯ КЛЕТОЧНЫХ ПОР | 2019 |
|
RU2777944C2 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ОСЦИЛЛЯЦИОННЫЙ | 2005 |
|
RU2294712C1 |
Изобретение относится к медицинской технике, а именно к средствам для прижигания и рассечения. Устройство для проведения хирургических процедур содержит рукоятку для захвата пользователем, рабочий инструмент, соединенный с рукояткой и имеющий по меньшей мере один электрический контакт, схему радиочастотного (РЧ) генератора, содержащую резонансную цепь, и схему управления, выполненную с возможностью изменения частоты РЧ сигнала возбуждения в окрестности резонансной частоты резонансной цепи. В другом выполнении устройства схема радиочастотного (РЧ) генератора включает частотно-зависимый аттенюатор, содержащий резонансную цепь, а схема управления выполнена с возможностью изменения частоты РЧ сигнала возбуждения в окрестности резонансной частоты резонансной цепи для регулирования по меньшей мере одной характеристики из мощности, напряжения и силы тока, выдаваемых на контакт рабочего инструмента. Способ использования медицинского устройства включает выработку РЧ сигнала, приложение РЧ сигнала к электроду рабочего инструмента и управление частотой генерируемого РЧ сигнала в окрестности резонансной частоты резонансной цепи. Способ прижигания сосуда или ткани устройством включает захват сосуда или ткани с помощью рабочего инструмента медицинского устройства, приложение РЧ сигнала к по меньшей мере одному электроду рабочего инструмента, который находится в контакте с сосудом или тканью, и управление частотой РЧ сигнала для регулирования по меньшей мере одной характеристики для проведения прижигания. Использование изобретения позволяет уменьшить габариты электронных модулей для размещения их внутри ручного устройства при обеспечении требуемых выходной мощности и управляемости. 4 н. и 13 з.п. ф-лы, 11 ил.
1. Медицинское устройство для проведения хирургических процедур, содержащее:
рукоятку для захвата пользователем, рабочий инструмент, соединенный с рукояткой и имеющий по меньшей мере один электрический контакт;
схему радиочастотного (РЧ) генератора, соединенную с рукояткой и выполненную с возможностью выработки РЧ сигнала возбуждения и подачи РЧ сигнала возбуждения на указанный по меньшей мере один электрический контакт; причем схема РЧ генератора содержит резонансную цепь; и
схему управления, выполненную с возможностью изменения частоты РЧ сигнала возбуждения в окрестности резонансной частоты резонансной цепи.
2. Устройство по п. 1, в котором схема радиочастотного генератора содержит схему управления переключением, которая вырабатывает периодически изменяющийся сигнал, такой как прямоугольный сигнал, из источника постоянного тока, и при этом резонансная цепь выполнена с возможностью приема периодически изменяющегося сигнала.
3. Устройство по п. 1 или 2, содержащее батарейный отсек для размещения одной или более аккумуляторных батарей для обеспечения питания для указанной схемы РЧ генератора для выработки указанного РЧ сигнала возбуждения.
4. Устройство по п. 3, в котором батарейный отсек выполнен с возможностью размещения модуля, содержащего указанные одну или более аккумуляторные батареи и схему РЧ генератора.
5. Устройство по п. 1, дополнительно содержащее:
клеммы аккумуляторной батареи для подключения к одной или более аккумуляторным батареям;
причем схема РЧ генератора соединена с указанными клеммами аккумуляторной батареи;
при этом схема частотного генератора содержит:
схему управления переключением для выработки периодически изменяющегося сигнала из разности потенциалов на указанных клеммах аккумуляторной батареи; и
указанную резонансную цепь, которая представляет собой резонансную схему возбуждения, соединенную с указанной схемой управления переключением и выполненную с возможностью фильтрации периодически изменяющегося сигнала, вырабатываемого схемой управления переключением; и
причем РЧ сигнал возбуждения контролируется выходным сигналом указанной резонансной схемы возбуждения.
6. Устройство по п. 1, в котором схема управления выполнена с возможностью принимать результаты измерения РЧ сигнала возбуждения и изменять частоту РЧ сигнала возбуждения для регулирования мощности, напряжения и/или силы тока, выдаваемых на указанный по меньшей мере один электрический контакт рабочего инструмента.
7. Устройство по п. 6, в котором результаты измерения получены с использованием схемы выборки, которая обеспечивает выборку измеряемого сигнала напряжения или тока с частотой выборки, которая изменяется синхронно с частотой и фазой РЧ сигнала возбуждения.
8. Устройство по п. 7, в котором частота, с которой схема выборки фиксирует измеряемый сигнал, является целой частью частоты РЧ сигнала возбуждения.
9. Устройство по п. 1, в котором резонансная характеристика резонансной цепи изменяется в зависимости от нагрузки, подключенной к указанному по меньшей мере одному электрическому контакту, и при этом схема управления выполнена с возможностью изменять частоту РЧ сигнала возбуждения для отслеживания изменений в резонансной характеристике резонансной цепи.
10. Медицинское устройство для проведения хирургических процедур, содержащее:
рукоятку для захвата пользователем;
рабочий инструмент, соединенный с рукояткой и имеющий по меньшей мере один электрический контакт;
схему радиочастотного (РЧ) генератора, выполненную с возможностью выработки РЧ сигнала возбуждения и подачи РЧ сигнала возбуждения на указанный по меньшей мере один электрический контакт;
причем схема радиочастотного (РЧ) генератора включает частотно-зависимый аттенюатор, содержащий резонансную цепь; и
схему управления, выполненную с возможностью изменения частоты РЧ сигнала возбуждения в окрестности резонансной частоты резонансной цепи для регулирования по меньшей мере одной характеристики из мощности, напряжения и силы тока, выдаваемых на указанный по меньшей мере один контакт рабочего инструмента.
11. Устройство по п. 10, в котором схема РЧ генератора содержит генератор сигнала, выполненный с возможностью вырабатывать периодически изменяющийся сигнал на требуемой радиочастоте.
12. Устройство по п. 10, в котором резонансная частота резонансной цепи является равной или близкой радиочастоте периодически изменяющегося сигнала.
13. Устройство по любому из пп. 10 и 11, в котором частотно-зависимый аттенюатор выполнен с возможностью ослабления периодически изменяющегося сигнала в зависимости от частоты периодически изменяющегося сигнала.
14. Устройство по п. 10, дополнительно содержащее:
вход для приема измеряемого сигнала, который изменяется с РЧ сигналом возбуждения, приложенным к указанному по меньшей мере одному электрическому контакту;
схему выборки для выборки измеряемого сигнала, принимаемого на указанном входе; и
схему измерения, выполненную с возможностью измерения РЧ сигнала возбуждения с использованием сигналов, полученных со схемы выборки;
причем указанная схема управления выполнена с возможностью управления схемой РЧ генератора в зависимости от результатов измерения, полученных схемой измерения, для изменения частоты вырабатываемого РЧ сигнала возбуждения; и
причем схема выборки выполнена с возможностью выборки измеряемого сигнала с частотой выборки, которая изменяется синхронно с частотой РЧ сигнала возбуждения.
15. Способ использования медицинского устройства для проведения хирургических процедур, включающий выработку РЧ сигнала и приложение РЧ сигнала к по меньшей мере одному электроду рабочего инструмента медицинского устройства, и управление частотой генерируемого РЧ сигнала в окрестности резонансной частоты резонансной цепи медицинского устройства для регулирования по меньшей мере одной характеристики из мощности, силы тока и напряжения, приложенных к указанному по меньшей мере одному электроду.
16. Способ прижигания сосуда или ткани устройством для проведения хирургических процедур по любому из пп. 1-14, включающий:
захват сосуда или ткани с помощью рабочего инструмента медицинского устройства;
приложение РЧ сигнала к по меньшей мере одному электроду рабочего инструмента, который находится в контакте с сосудом или тканью; и
управление частотой РЧ сигнала для регулирования по меньшей мере одной характеристики из мощности, силы тока и напряжения, приложенных к ткани, для проведения прижигания.
17. Способ по п. 16, в котором на указанной стадии управления изменяют частоту РЧ сигнала для регулирования прикладываемой к сосуду или ткани мощности, и дополнительно включающий измерение импеданса ткани или сосуда и изменение требуемой мощности, приложенной к сосуду или ткани, в зависимости от результатов измерения импеданса.
| US 6325799 B1, 04.12.2001 | |||
| US 6565558 B1, 20.05.2003 | |||
| Приспособление против угона рельсов | 1929 |
|
SU22035A1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 1999 |
|
RU2154437C1 |
| WO 2009010565 A1, 22.01.2009. | |||

