Изобретение относится к производственной линии, содержащей ряд подвесных рам для домашней птицы и обрабатывающее устройство или обрабатывающие устройства, в которой подвесные рамы для птицы могут перемещаться вперед и назад относительно обрабатывающего устройства или обрабатывающих устройств, и подвесные рамы для птицы и обрабатывающее устройство или обрабатывающие устройства синхронизированы так, чтобы обеспечить возможность обработки птицы обрабатывающим устройством или обрабатывающими устройствами, при этом дополнительно подвесные рамы для птицы и/или обрабатывающее устройство или обрабатывающие устройства выполнены с возможностью выбора между рабочим положением, в котором птица обрабатывается обрабатывающим устройством или устройствами, и недействующим или нерабочим положением, в котором обработка птицы обрабатывающим устройством или устройствами предотвращается.
Такая производственная линия в данной области техники известна и раскрывается, например, в Европейском патенте ЕР В 1139769.
В соответствии с упомянутым предшествующим уровнем техники для выбора, требуется ли обрабатывающему устройству производить операцию на проходящей мимо тушке птицы или нет, используются поворотные консоли. Выбор, следует ли обрабатывать тушку птицы, может быть результатом очень разнообразного процесса принятия решения и основываться, например, на контроле качества, ветеринарной проверке, отборе по весу, предполагаемом типе конечного продукта для тушек птиц или на любой возможной комбинации таких решений.
Проблема решения из уровня техники, связанного с поворотными консолями, которые должны быть помещены в требуемое положение, чтобы либо иметь согласованное перемещение тушек птиц и в непосредственной близости от обрабатывающего устройства, либо направлять тушки птиц обходным путем вдоль такого обрабатывающего устройства, в том, что это решение не особенно подходит для быстродействующих технологических линий. Когда применяются более высокие скорости, риск, что может произойти неумышленное пагубное заедание транспортируемой домашней птицы, когда поворотная консоль еще не достигла своего конечного положения, а находится где-то посередине, становится очень большим.
Заявитель сталкивается с этой проблемой решения из уровня техники по меньшей мере в течение десятилетия и теперь придумал альтернативное решение, которое очень хорошо подходит для быстродействующих применений и которое является универсальным в отношении его реализации и удачным в отношении того, как оно сочетает в себе надежность с простотой.
US 5505657 раскрывает линию обработки птицы, в которой подвесные рамы для птицы выполнены в виде переключателя, имеющего по меньшей мере два положения: первое положение, в котором птица, подвешенная на подвесной раме, следует по первому пути, который сводит подвесные рамы для птицы и обрабатывающее устройство или устройства вместе для обеспечения обработки птицы на подвесной раме обрабатывающим устройством или устройствами, и второе положение, в котором птица, подвешенная на подвесной раме, следует по второму пути, который удерживает птицу на расстоянии от обрабатывающего устройства или устройств для предупреждения обработки птицы обрабатывающим устройством или устройствами.
US 2013/0037381 раскрывает линию обработки птицы, в которой подвесные рамы выполнены как переключатель, имеющий по меньшей мере два положения: первое положение, в котором подвесные рамы принуждаются следовать по первому пути, который сводит подвесные рамы для птицы и обрабатывающее устройство или устройства вместе так, чтобы обеспечить возможность обрабатывающему устройству или устройствам обрабатывать птицу, переносимую подвесными рамами для птицы, и второе положение, в котором подвесные рамы для птицы принуждаются следовать по второму пути, который удерживает подвесные рамы для птицы и обрабатывающее устройство или устройства на расстоянии, чтобы предотвращать обработку обрабатывающим устройством или устройствами птицы, которую переносят подвесные рамы для птицы.
Согласно изобретению предложена производственная линия обработки птицы, в которой переключатель, по меньшей мере, частично выполнен в виде перемещаемой направляющей, которая выполнена в выбранном одном элементе из подвесных рам для птицы и обрабатывающего устройства или устройств, при этом перемещаемая направляющая несет кулачковое следящее устройство, которое выполнено с возможностью взаимодействия с рабочей поверхностью кулачка, которая определяет выбранный один из первого пути и второго пути для кулачкового следящего устройства и выбранный один элемент из подвесных рам для птицы и обрабатывающего устройства или устройств, с которым соединено упомянутое кулачковое следящее устройство.
В соответствии с изобретением значительный недостаток решения из уровня техники в отношении работы с неподвижной поворотной консолью или консолями устраняется путем установки этого переключателя, который действует в качестве механизма выбора либо на подвесных рамах для птицы, либо на обрабатывающих устройствах. Таким образом, механизм выбора, переключатель, перемещается вместе с частью, на которой он установлен, и это эффективно предотвращает ситуацию, когда переключатель может застрять.
Соответственно, переключатель выполнен с возможностью перемещения между его первым положением и вторым положением с помощью, по меньшей мере, одного исполнительного механизма. Этот исполнительный механизм может быть превосходно адаптирован к требованиям по обеспечению надежного управления переключателем, особенно когда переключатель перемещается на большой скорости.
Возможно и даже предпочтительно, что по меньшей мере один исполнительный механизм имеет стационарное положение относительно подвесных рам для птицы и обрабатывающего устройства или устройств. Таким образом, по меньшей мере, один исполнительный механизм может управлять переключателями всех подвесных рам для птицы и обрабатывающих устройств, которые перемещаются вместе с исполнительным механизмом.
Предпочтительно производственная линия имеет средство для перемещения переключателя в выбранное одно из упомянутых первого и второго положений после того, как соответствующие подвесные рамы для птицы пройдут соответствующее обрабатывающее устройство или устройства. Таким образом, для переключателя может быть обеспечено стандартное исходное положение с образованием надежной отправной точки по меньшей мере для одного исполнительного механизма, чтобы перемещать переключатель в возможное требуемое положение, и это иногда может означать, что исполнительный механизм может оставаться бездействующим, если возможное требуемое положение совпадает с исходным положением переключателя.
Универсальность решения согласно настоящему изобретению подтверждается тем, что обрабатывающее устройство или обрабатывающие устройства могут быть выбраны из обрабатывающего средства линейного перемещения и вращающегося обрабатывающего средства.
Кроме того, предпочтительно, что рабочая поверхность кулачка обеспечена скатом для отжимания кулачкового следящего устройства от рабочей поверхности кулачка после того, как соответствующие подвесные рамы для птицы пройдут соответствующее обрабатывающее устройство или устройства в положение, соответствующее выбранному одному из первого и второго положений переключателя. Это обеспечивает ранее упомянутое надежное исходное положение пуска для переключателя.
Подходящий способ реализации изобретения заключается в обеспечении того, что обрабатывающее устройство или обрабатывающие устройства смонтированы на направляющих обрабатывающей машины, которая снабжена рабочей поверхностью кулачка, и что каждое из обрабатывающих устройств снабжено перемещаемой направляющей, на которой смонтировано кулачковое следящее устройство, при этом перемещаемая направляющая выполнена с возможностью перемещения между первым положением, в котором кулачковое следящее устройство входит в зацепление с рабочей поверхностью кулачка, и вторым положением, в котором кулачковое следящее устройство выходит из зацепления с рабочей поверхностью кулачка. Предпочтительно, что тогда имеется средство приведения в действие для зацепления и/или расцепления кулачкового следящего устройства с рабочей поверхностью кулачка.
Изобретение в дальнейшем будет пояснено со ссылкой на чертежи неограничивающих примеров производственной линии в соответствии с изобретением.
На чертежах:
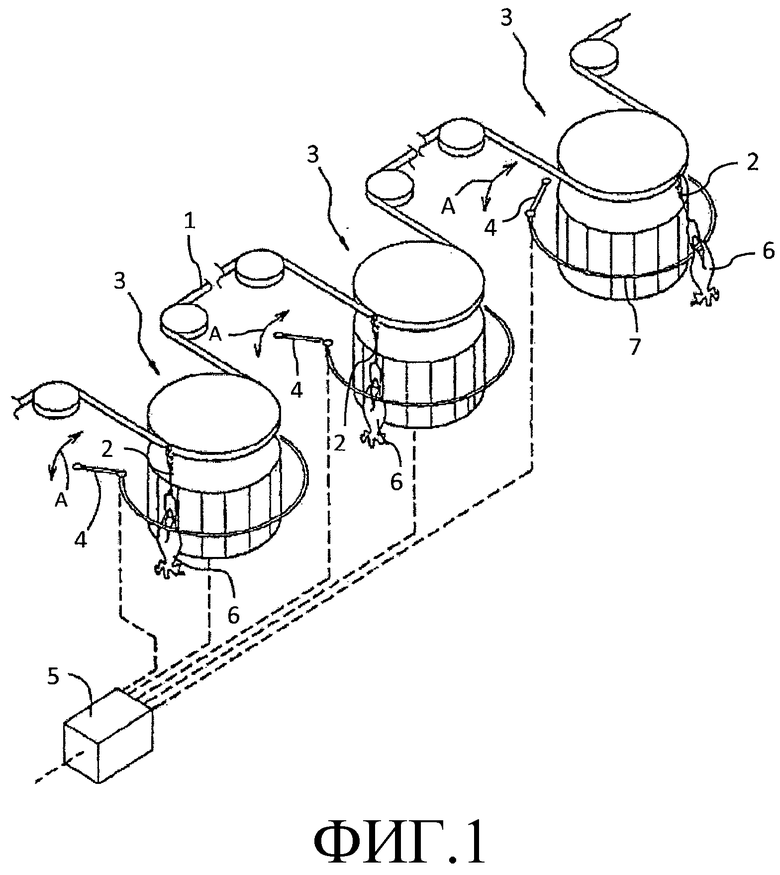
фиг. 1 показывает пример производственной линии предшествующего уровня техники;
фиг. 2 обеспечивает подробный вид вращающегося обрабатывающего средства, обеспеченного обрабатывающими устройствами, которые могут быть приведены в действие по выбору в соответствии с изобретением;
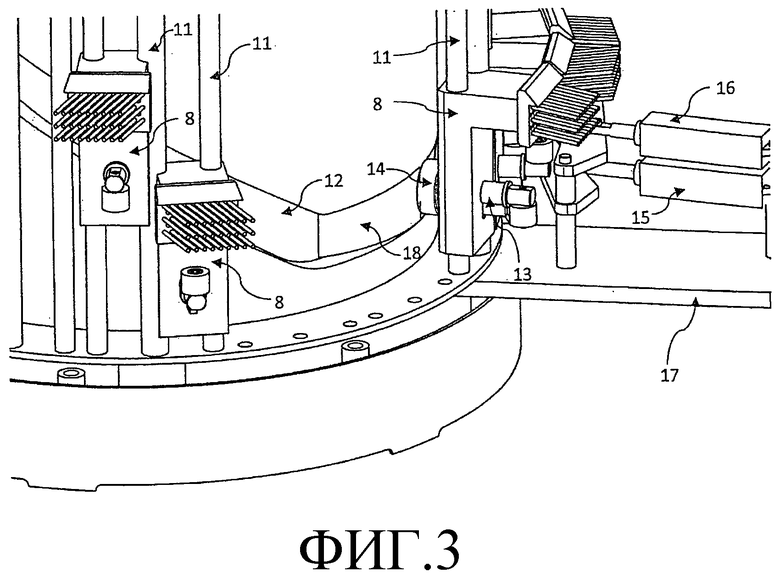
- фиг. 3 показывает обрабатывающее средство, представленное на фиг. 2, у его выходной секции, когда подвесная рама для птицы отходит от вращающегося обрабатывающего средства;
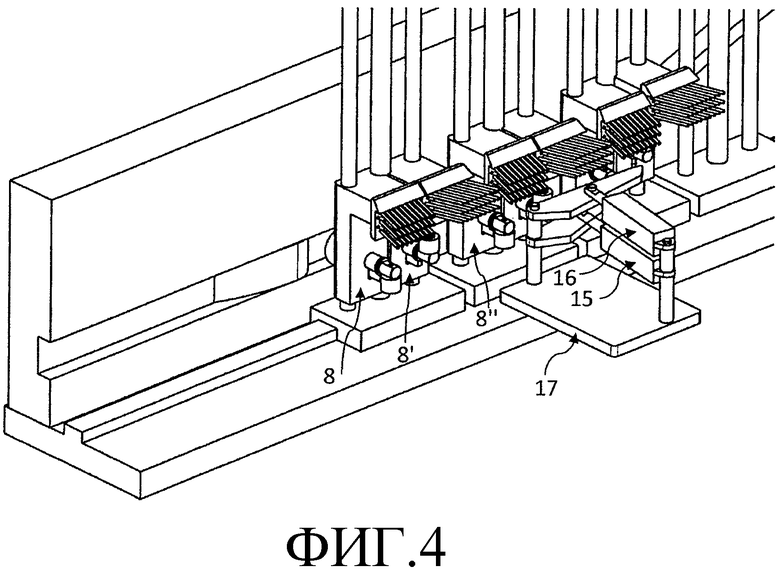
- фиг. 4 показывает вариант осуществления в соответствии с изобретением, в котором обрабатывающее средство перемещается линейно; и
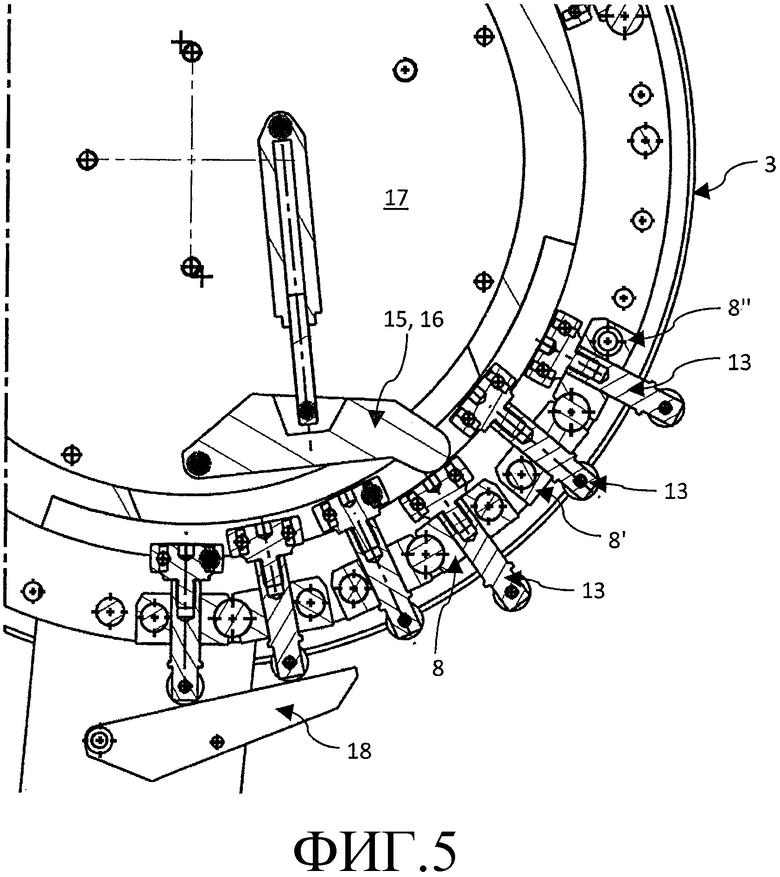
- фиг. 5 показывает вариант осуществления, в котором средство приведения в действие для обрабатывающих устройств расположено внутри вращающегося обрабатывающего средства.
Во всех случаях, когда на чертежах применяются одни и те же позиционные обозначения, эти позиционные обозначения относятся к одинаковым частям.
Краткий анализ производственной линии 1 предшествующего уровня техники представлен со ссылкой на фиг. 1. Эта производственная линия 1 известным образом содержит ряд подвесных рам 2 для птицы и ряд обрабатывающих средств 3, которые оборудованы обрабатывающими устройствами. Благодаря своему перемещению на производственной линии 1 подвесные рамы 2 для птицы перемещаются к каждому из обрабатывающих средств 3 и их обрабатывающих устройств, проходят эти обрабатывающие средства 3 с обеспеченными в них обрабатывающими устройствами, и затем перемещаются все дальше и дальше от этих обрабатывающих устройств обрабатывающих средств 3. В известном способе подвесные рамы 2 для птицы и обрабатывающие устройства на обрабатывающих средствах 3 синхронизированы так, чтобы обеспечивать возможность обработки птицы обрабатывающими устройствами этих обрабатывающих средств 3. Вплоть до этого момента производственная линия по настоящему изобретению отождествляется с производственной линией предшествующего уровня техники.
На фиг. 1 показано, как в предшествующем уровне техники осуществляется выбор, что обеспечивает возможность выбора между рабочим положением обрабатывающего устройства или обрабатывающих устройств 3, в котором птица обрабатывается обрабатывающим устройством или устройствами обрабатывающих средств 3, и недействующим, или нерабочим, положением, в котором обработка птицы обрабатывающим устройством или устройствами таких обрабатывающих средств 3 предотвращается. С этой целью в предшествующем уровне техники применяют поворотные консоли 4, которые перемещаются в соответствии со стрелками А под управлением вычислительной системы 5. В двух левых обрабатывающих средствах 3 тушки 6 птиц перемещаются во взаимодействии и в непосредственной близости от обрабатывающих устройств обрабатывающих средств 3, и это вызвано тем, что поворотные консоли 4, расположенные непосредственно перед двумя первыми слева обрабатывающими средствами 3, повернуты в положение, которое обеспечивает требуемый доступ подвесной рамы 2 для птицы к обрабатывающим средствам 3. Однако до достижения третьего, находящегося справа обрабатывающего средства 3, поворотная консоль 4, находящаяся непосредственно перед этим последним обрабатывающим средством 3, закрывает к нему доступ, заставляя соответствующие тушки 6 птиц обходить обрабатывающие устройства находящегося справа обрабатывающего средства путем перемещения по направляющему рельсу 7, который удерживает тушки 6 птиц на расстоянии от обрабатывающих устройств, предотвращая их обработку этих тушек.
При дальнейшем рассмотрении прилагаемых чертежей, на фиг. 2-5 показано, как в соответствии с изобретением осуществляется выбор, обеспечивающий то, что обрабатывающее устройство или обрабатывающие устройства обрабатывающих средств 3 выполнены с возможностью выбора между рабочим положением, в котором птица обрабатывается таким обрабатывающим устройством или устройствами, и недействующим, или нерабочим, положением, в котором обработка птицы обрабатывающим устройством или устройствами таких обрабатывающих средств 3 предотвращается.
Фиг. 2 предоставляет детализированное изометрическое изображение вращающегося обрабатывающего средства 3, обеспеченного обрабатывающими устройствами 8, которые могут быть приведены в действие по выбору в соответствии с изобретением. На чертеже также показана часть подвесных рам 9 для птицы, с помощью которых тушки птиц, например, подвешенные за голень или подвешенные за ножки, могут быть приближены непосредственно к обрабатывающему средству 3. Хотя последующее описание ссылается на применение некоторых признаков для реализации изобретения только в отношении обрабатывающих устройств, то же самое, конечно, можно аналогичным образом сделать и без изобретательского усилия, реализуя эти признаки в сочетании с подвесными рамами для птицы. Однако для ясности обсуждение примеров относится только к реализации релевантных признаков относительно обрабатывающих устройств. Несмотря на это в соответствии с общей применимостью идеи изобретения прилагаемая формула изобретения охватывает обе возможности.
Фиг. 2 показывает, что каждое из обрабатывающих устройств 8 обеспечено переключателем 10, 10′, 10″', имеющим, по меньшей мере, два положения. Переключатель 10′, например, находится в первом положении, в котором обрабатывающее устройство 8′ принуждается следовать по первому пути, который приводит его в непосредственную близость с соответствующей подвесной рамой для птицы, которая перемещается синхронно с упомянутым обрабатывающим устройством 8′, таким образом, это обрабатывающее устройство 8′ располагается так, что оно может обрабатывать птицу, которую переносит соответствующая подвесная рама для птицы. Поскольку в следующем примере переключатель 10″' находится во втором положении, в котором обрабатывающее устройство 8″ принуждается следовать по второму пути, который удерживает соответствующую подвесную раму для птицы и обрабатывающее устройство 8″ на расстоянии друг от друга, обработка обрабатывающим устройством 8″ птицы, которую переносит соответствующая подвесная рама для птицы, перемещающаяся согласованно с этим обрабатывающим устройством 8″, предотвращается.
Одна деталь и другая в соответствии с неограничивающим примером, показанным на фиг. 2, воплощены посредством их выполнения так, что обрабатывающие устройства 8, 8′, 8″ смонтированы на направляющих 11, образующих часть обрабатывающей машины 3. Таким образом, обрабатывающие устройства 8, 8′, 8″ могут передвигаться по направляющим 11 вверх и вниз. Будут ли обрабатывающие устройства передвигаться вверх и вниз по направляющим 11, определяется с помощью рабочей поверхности 12 кулачка, которая обеспечена во вращающемся обрабатывающем средстве 3. Переключатель каждого обрабатывающего устройства 8, 8′, 8″ определяет, будут ли эти обрабатывающие устройства перемещаться в соответствии с рабочей поверхностью 12 кулачка. Переключатель 10, 10′, 10″ каждого обрабатывающего устройства 8, 8′, 8″ с этой целью и в этом примере воплощен таким образом, что каждое обрабатывающее устройство 8, 8′, 8″ обеспечено перемещаемой направляющей 13, на которой установлено кулачковое следящее устройство 14. Перемещаемая направляющая 13 выполнена с возможностью перемещения между первым положением, в котором кулачковое следящее устройство 14 входит в зацепление с рабочей поверхностью кулачка 12 - ситуация, показанная на фиг. 2 в отношении обрабатывающего устройства 8′, и вторым положением, в котором кулачковое следящее устройство 14 будет выведено из зацепления с рабочей поверхностью 12 кулачка. В последнем случае обрабатывающее устройство, у которого кулачковое следящее устройство 14 не входит в зацепление с рабочей поверхностью 12 кулачка, не будет следовать по этой рабочей поверхности 12 кулачка и, следовательно, будет поддерживаться на его первоначальном уровне без перемещения вверх или вниз. Пример такой ситуации показан со ссылкой на обрабатывающее устройство 8″′.
Перемещение переключателя 10, 10′, 10″ между его первым положением и вторым положением выполняется с помощью, по меньшей мере, одного исполнительного механизма 15, 16. В этом примере имеются два исполнительных механизма, которые могут быть приведены в действие независимо друг от друга. Исполнительные механизмы 15, 16 смонтированы в стационарном положении относительно подвесных рам 9 для птицы и обрабатывающих устройств 8, 8′, 8″ обрабатывающего средства 3. Это означает, что в то время как обрабатывающее средство 3 и установленные на нем обрабатывающие устройства 8, 8′, 8″ вращаются и в то время как подвесные рамы 9 для птицы перемещаются синхронно и поблизости от обрабатывающего средства 3, они проходят средства 15, 16 исполнительного механизма, которые смонтированы на стационарном опорном элементе 17. В соответствующий момент, когда обрабатывающие средства 8, 8′, 8″ проходят средства 15, 16 исполнительного механизма, эти средства исполнительного механизма могут быть активизированы, чтобы по выбору переместить переключатели 10, 10′, 10″, выполненных при помощи направляющих с установленными на них кулачковыми следящими устройствами, в зацепление с рабочей поверхностью 12 кулачка, как показано на фиг. 2 в отношении обрабатывающего устройства 8′ и его направляющей 13 с установленным на ней кулачковым следящим устройством 14. В качестве альтернативы перемещение переключателей с помощью средств 15, 16 исполнительного механизма может быть заблокировано для выхода кулачковых следящих устройств, установленных на направляющих, из зацепления с рабочей поверхностью 12 кулачка, как это сделано с обрабатывающим устройством 8″′, также показанным на фиг. 2.
На фиг. 3 показано средство, в данном случае воплощенное в виде ската 18, это средство обеспечено для перемещения каждого переключателя, который в этом неограничивающем примере выполнен в виде направляющей 13 с установленным на ней кулачковым следящим устройством 14, в состояние расцепления с рабочей поверхностью 12 кулачка. Это должно произойти после того, как соответствующая подвесная рама для птицы прошла соответствующее обрабатывающее устройство 8. Это перемещение кулачкового следящего устройства 14 из зацепления с рабочей поверхностью 12 кулачка соответствует второму положению переключателя 10, в котором обрабатывающее устройство 8 принуждается следовать по второму пути, который удерживает подвесную раму для птицы и обрабатывающее устройство на расстоянии, чтобы предотвращать обработку этим обрабатывающим устройством птицы, которую переносит синхронно двигающаяся подвесная рама для птицы. Это является тем исходным положением, из которого можно производить выбор для любых следующих прибывающих тушек птицы в обрабатывающем средстве 3, для которых предстоит определять, должны ли они быть обработаны обрабатывающими устройствами 8, 8′, 8″ таким образом, как пояснялось в данной работе выше со ссылкой на фиг. 1. Однако также можно это выполнить так, чтобы в качестве такого исходного положения выбрать первое положение переключателя, при этом первое положение будет выполнено так, что обрабатывающее устройство будет обрабатывать птицу, переносимую соответствующей подвесной рамой для птицы.
Фиг. 4 представляет вид альтернативного варианта осуществления, показывающий, что обрабатывающее устройство или обрабатывающие устройства 8, 8′, 8″ также могут быть выбраны для образования части обрабатывающего средства линейного перемещения.
Фиг. 5 предоставляет вид сверху в разрезе варианта осуществления, в котором средства 15, 16 исполнительного механизма для обрабатывающих устройств 8, 8′, 8″ расположены внутри вращающегося обрабатывающего средства 3 и установлены на стационарной платформе 17 в упомянутом обрабатывающем средстве 3. Тогда можно использовать отдельный рычаг 18, примыкающий к внешней окружности вращающегося обрабатывающего средства 3 (вместо ската на рабочей поверхности кулачка), чтобы возвращать обрабатывающие устройства 8, 8′, 8″ в их первоначальное, или исходное, положение непосредственно перед моментом, когда происходит приведение в действие по выбору средств 15, 16 исполнительного механизма для перемещения обрабатывающих устройств 8, 8′, 8″ в их требуемое положение, чтобы произвести выбор между обработкой птицы или предотвращением обработки птицы.
Специалисту в данной области техники из вышеупомянутого описания должно быть ясно, что существует множество изменений, допустимых для примеров вариантов осуществления, обеспеченных в данной работе, без отступления от защищаемого объема, представленного в прилагаемой формуле изобретения. Поэтому приведенные примеры не следует понимать в качестве ограничивающих, как в прилагаемой формуле изобретения, а только как разъяснение формулировки этой формулы изобретения, без ущерба для их защищаемого объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ГОЛОВ С ТРАХЕЕЙ И ПИЩЕВОДОМ ОТ ТУШЕК ПТИЦЫ | 2015 |
|
RU2611832C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ВНУТРЕННОСТЕЙ ИЗ ТУШЕК ПТИЦЫ | 2013 |
|
RU2547425C1 |
| УСТРОЙСТВО ДЛЯ ОТРЕЗАНИЯ ШЕИ ТУШЕК ПТИЦЫ | 2015 |
|
RU2611833C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТУШЕК ПТИЦЫ | 2018 |
|
RU2694609C1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ШЕИ ТУШЕК ПТИЦЫ | 2011 |
|
RU2488274C1 |
| Устройство для удаления внутренностей из забитой птицы | 1983 |
|
SU1306466A3 |
| УСТРОЙСТВО ДЛЯ ВЫРЕЗАНИЯ КЛОАКИ ТУШЕК ПТИЦЫ | 2013 |
|
RU2551104C1 |
| Устройство пережима и отделения шейных позвонков от тушки птицы | 1990 |
|
SU1745177A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ВНУТРЕННОСТЕЙ ИЗ ТУШЕК ПТИЦЫ | 1994 |
|
RU2078510C1 |
| ЛИНИЯ ОБРАБОТКИ И СПОСОБ ПРОВЕРКИ ТУШЕК ПТИЦЫ И/ИЛИ ГРУППЫ ПОТРОХОВ | 2017 |
|
RU2672328C1 |
Изобретение предназначено для использования в птицеперерабатывающей промышленности. Линия обработки птицы содержит ряд подвесных рам для птицы и обрабатывающее устройство или обрабатывающие устройства, подвесные рамы для птицы могут перемещаться вперед и назад относительно обрабатывающего устройства или устройств. Подвесные рамы для птицы и/или обрабатывающее устройство или обрабатывающие устройства выполнены с возможностью выбора между рабочим положением, в котором птица обрабатывается обрабатывающим устройством или устройствами, и нерабочим положением, в котором предотвращается обработка птицы обрабатывающим устройством или устройствами. Один элемент из подвесных рам для птицы и обрабатывающего устройства или устройств обеспечен переключателем, имеющим, по меньшей мере, два положения: первое положение, в котором выбранный один элемент из подвесных рам для птицы и обрабатывающего устройства или устройств принуждается следовать по первому пути, который сводит подвесные рамы для птицы и обрабатывающее устройство или устройства вместе так, чтобы обеспечить возможность обрабатывающему устройству или устройствам обрабатывать птицу, переносимую подвесными рамами для птицы, и второе положение, в котором выбранный один элемент из подвесных рам для птицы и обрабатывающего устройства или устройств принуждается следовать по второму пути, который удерживает подвесные рамы для птицы и обрабатывающее устройство или устройства на расстоянии, чтобы предотвращать обработку обрабатывающим устройством или устройствами птицы, переносимой подвесными рамами для птицы. 7 з.п. ф-лы, 5 ил.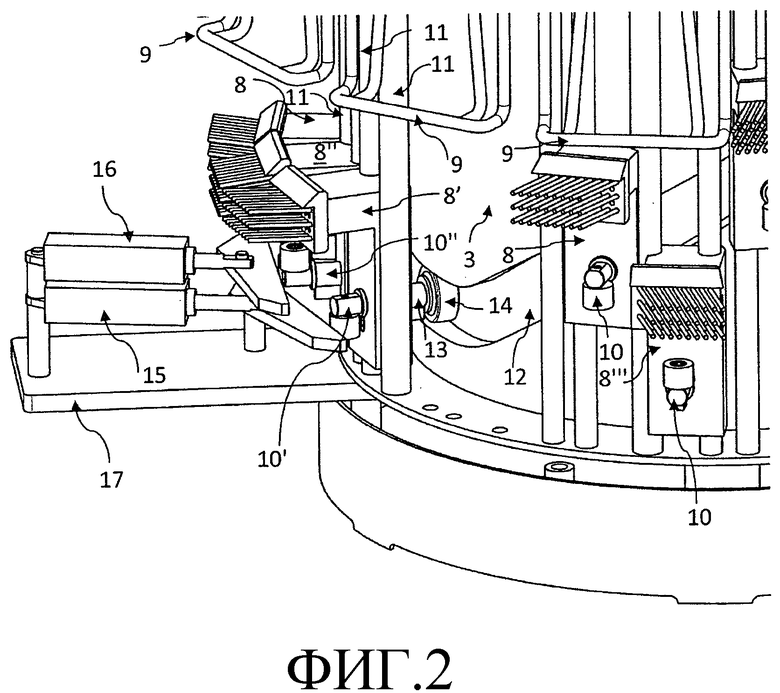
1. Линия обработки птицы (1), содержащая ряд подвесных рам (9) для птицы и обрабатывающее устройство или обрабатывающие устройства (8, 8′, 8″), в которой подвесные рамы (9) для птицы выполнены с возможностью перемещения вперед и назад относительно обрабатывающего устройства или обрабатывающих устройств (8, 8′, 8″) и подвесные рамы (9) для птицы и обрабатывающее устройство или обрабатывающие устройства (8, 8′, 8″) синхронизированы так, чтобы обеспечить возможность обработки птицы обрабатывающим устройством или обрабатывающими устройствами (8, 8′, 8″), при этом дополнительно подвесные рамы (9) для птицы и/или обрабатывающее устройство или обрабатывающие устройства (8, 8′, 8″) выполнены с возможностью выбора между рабочим положением, в котором птица обрабатывается обрабатывающим устройством или устройствами (8, 8′, 8″), и недействующим, или нерабочим, положением, в котором обработка птицы обрабатывающим устройством или устройствами (8, 8′, 8″) предотвращается, отличающаяся тем, что выбранный один элемент из подвесных рам (9) для птицы и обрабатывающего устройства или устройств (8, 8′, 8″) обеспечен переключателем (10, 10′, 10″), имеющим, по меньшей мере, два положения: первое положение, в котором выбранный один элемент из подвесных рам (9) для птицы и обрабатывающего устройства или устройств (8, 8′, 8″) принуждается следовать по первому пути, который сводит подвесные рамы (9) для птицы и обрабатывающее устройство или устройства (8, 8′, 8″) вместе так, чтобы обеспечить возможность обрабатывающему устройству или устройствам (8, 8′, 8″) обрабатывать птицу, переносимую подвесными рамами (2) для птицы, и второе положение, в котором выбранный один элемент из подвесных рам (9) для птицы и обрабатывающего устройства или устройств (8, 8′, 8″) принуждается следовать по второму пути, который удерживает подвесные рамы (9) для птицы и обрабатывающее устройство или устройства (8, 8′, 8″) на расстоянии, чтобы предотвращать обработку обрабатывающим устройством или устройствами (8, 8′, 8″) птицы, переносимой подвесными рамами (2) для птицы, отличающаяся тем, что переключатель (10, 10′, 10″), по меньшей мере, частично выполнен с перемещаемой направляющей (13), которая выполнена в выбранном одном элементе из подвесных рам (9) для птицы и обрабатывающего устройства или устройств (8, 8′, 8″), при этом перемещаемая направляющая (13) несет кулачковое следящее устройство (14), которое выполнено с возможностью взаимодействия с рабочей поверхностью (12) кулачка, которая определяет выбранный один из первого пути и второго пути для кулачкового следящего устройства (14) и выбранный один элемент из подвесных рам (9) для птицы и обрабатывающего устройства или устройств (8, 8′, 8″), с которым соединено упомянутое кулачковое следящее устройство (14).
2. Линия обработки птицы по п. 1, отличающаяся тем, что переключатель (10, 10′, 10″) выполнен с возможностью перемещения между его первым положением и вторым положением с помощью, по меньшей мере, одного исполнительного механизма (15, 16).
3. Линия обработки птицы по п. 1 или 2, отличающаяся тем, что по меньшей мере один исполнительный механизм (15, 16) имеет стационарное положение относительно подвесных рам (9) для птицы и обрабатывающего устройства или устройств (8, 8′, 8″).
4. Линия обработки птицы по п. 1 или 2, отличающаяся тем, что она имеет средство для перемещения переключателя (10, 10′, 10″) в выбранное одно из упомянутых первого и второго положений после того, как соответствующие подвесные рамы (9) для птицы пройдут соответствующее обрабатывающее устройство или устройства (8, 8′, 8″).
5. Линия обработки птицы по п. 1 или 2, отличающаяся тем, что обрабатывающее устройство или обрабатывающие устройства (8, 8′, 8″) выбраны из обрабатывающего средства линейного перемещения и вращающегося обрабатывающего средства (3).
6. Линия обработки птицы по п. 1, отличающаяся тем, что рабочая поверхность (12) кулачка обеспечена скатом (18) для отжимания кулачкового следящего устройства (14) от рабочей поверхности (12) кулачка после прохождения соответствующих подвесных рам (9) для птицы соответствующего обрабатывающего устройства или устройств (8, 8′, 8″)и в положение, соответствующее выбранному одному из первого и второго положений переключателя (10, 10′, 10″).
7. Линия обработки птицы по п. 1, отличающаяся тем, что обрабатывающее устройство или обрабатывающие устройства (8, 8′, 8″) смонтированы на направляющих (11) обрабатывающей машины (3), которая обеспечена рабочей поверхностью (12) кулачка, и каждое из обрабатывающих устройств (8, 8′, 8″) обеспечено перемещаемой направляющей (13), на которой установлено кулачковое следящее устройство (14), при этом перемещаемая направляющая (13) выполнена с возможностью перемещения между первым положением, в котором кулачковое следящее устройство (14) входит в зацепление с рабочей поверхностью (12) кулачка, и вторым положением, в котором кулачковое следящее устройство (14) выходит из зацепления с рабочей поверхностью (12) кулачка.
8. Линия обработки птицы по п. 7, отличающаяся тем, что она имеет средство (15, 16) приведения в действие для зацепления и/или расцепления кулачкового следящего устройства (14) с рабочей поверхностью (12) кулачка.
| US 5505657 A, 09.04.1996 | |||
| US 2013037381 A1, 14.02.2013 | |||
| Моечная машина | 1983 |
|
SU1139769A1 |

