ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу в узле для локализации этого узла в беспроводной сети промышленного предприятия, а также к узлу и беспроводной сети.
УРОВЕНЬ ТЕХНИКИ
На промышленном предприятии могут использоваться подвижные беспроводные датчики. Может быть желательным иметь возможность определять местоположение этих датчиков на предприятии. С этой целью, могут быть использованы стационарные маяки с известной позицией. Тогда местоположение датчика может быть вычислено, например, через триангуляцию или посредством оценки расстояния между каждым из маяков и датчиком, с помощью измерения затухания каждого из сигналов маяка, когда он достигает датчика. Чем слабее сигнал, тем удаленнее маяк.
Беспроводные сети датчиков раскрываются в патентных публикациях WO 2011/040346, US 7,812,718 и US 2010/085242.
В документе US 2011/0105142, в качестве предшествующего уровня техники, раскрывается способ, в котором устройство беспроводной связи оценивает свое местоположение на основании триангуляции с использованием интенсивности приема маяка, постоянно передаваемого от базовой станции, и информации о местоположении базовой станции, включенной в этот маяк. Согласно данному способу, устройство беспроводной связи должно принимать маяки по меньшей мере от трех базовых станций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом, настоящее изобретение относится к способу в узле для локализации этого узла в беспроводной сети промышленного предприятия, при этом способ содержит этапы, на которых: принимают сигналы местоположения, передаваемые каждым, по меньшей мере, из трех маяков, причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков, при этом сигналы местоположения передаются маяками с использованием динамической мощности передачи, посредством чего маяки могут передавать сигналы местоположения на множестве разных предварительно определенных отправляющих уровнях сигнала; обнаруживают соответствующие интенсивности принимаемого сигнала принимаемых сигналов местоположения; получают информацию о разных уровнях сигнала, на которых могут осуществлять передачу маяки; изучают принимаемые сигналы местоположения; определяют уровни сигнала, используемые каждым из маяков для передачи сигналов местоположения, на основании изучения принимаемых сигналов; вычисляют расстояние до каждого из маяков, на основании обнаруженных интенсивностей сигнала и определенных уровней сигнала; и локализуют узел посредством принимаемой информации о местоположении и вычисляемых расстояний.
В соответствии с другим аспектом, настоящее изобретение относится к узлу для беспроводной сети, при этом узел содержит: приемник, выполненный с возможностью приема сигналов местоположения, передаваемых каждым, по меньшей мере, из трех маяков, причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков, при этом сигналы местоположения передаются маяками с использованием динамической мощности передачи, посредством чего маяки могут передавать сигналы местоположения на множестве разных предварительно определенных уровней сигнала; блок обнаружения, выполненный с возможностью обнаружения соответствующих интенсивностей принимаемого сигнала принимаемых сигналов местоположения; блок хранения, выполненный с возможностью хранения информации о разных уровнях сигнала, на которых могут осуществлять передачу маяки; и блок обработки, выполненный с возможностью изучения принимаемых сигналов местоположения, определения уровней сигнала, используемых каждым из маяков для передачи сигналов местоположения, на основании изучения принимаемых сигналов, вычисления расстояния до каждого из маяков, на основании обнаруженных интенсивностей сигнала и определенных уровней сигнала, и локализации узла посредством принимаемой информации о местоположении и вычисляемых расстояний.
В соответствии с другим аспектом, настоящее изобретение относится к беспроводной сети промышленного предприятия, при этом сеть содержит: узел в соответствии с вышеприведенным аспектом; по меньшей мере, три маяка, выполненных с возможностью осуществления беспроводной передачи сигналов местоположения узлу; и центральный блок управления, выполненный с возможностью осуществления беспроводной связи, как с узлом, так и маяками.
Приведенные выше и ниже обсуждения, которые относятся к любому из вышеприведенных аспектов настоящего изобретения, также в применимых частях имеют отношение к любым из прочих аспектов.
Посредством определения уровня сигнала, такого как уровень мощности или уровень амплитуды, на котором каждый из маяков передает информацию о местоположении, узел может локализовать себя, даже когда маяки используют протокол динамической мощности для своих передач, например, адаптивную регулировку мощности (APA). В соответствии с настоящим изобретением, уровни сигнала передачи, используемые маяками, могут быть определены на основании изучения принимаемых сигналов местоположения в сочетании с полученной информацией о том, на каких уровнях сигнала может осуществлять передачу каждый маяк, например, информацией об используемом протоколе динамической мощности.
В целом, все понятия, которые используются в формуле изобретения, должны толковаться в соответствии с их обычным значением в соответствующей области техники, если в данном документе явно не определено иное. Все ссылки на «элемент, устройство, компонент, средство, этап, и т.д.» должны толковаться открыто, как относящиеся, по меньшей мере, к одному экземпляру элемента, устройства, компонента, средства, этапа, и т.д., если явно не утверждается иное. Этапы любого раскрываемого здесь способа не обязательно должны выполняться в четкой раскрываемой очередности, если это явно не обсуждается.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь изобретение описывается, в качестве примера, со ссылкой на сопроводительные чертежи, на которых:
Фиг. 1 является схематичным видом сверху беспроводной сети в соответствии с вариантом осуществления настоящего изобретения.
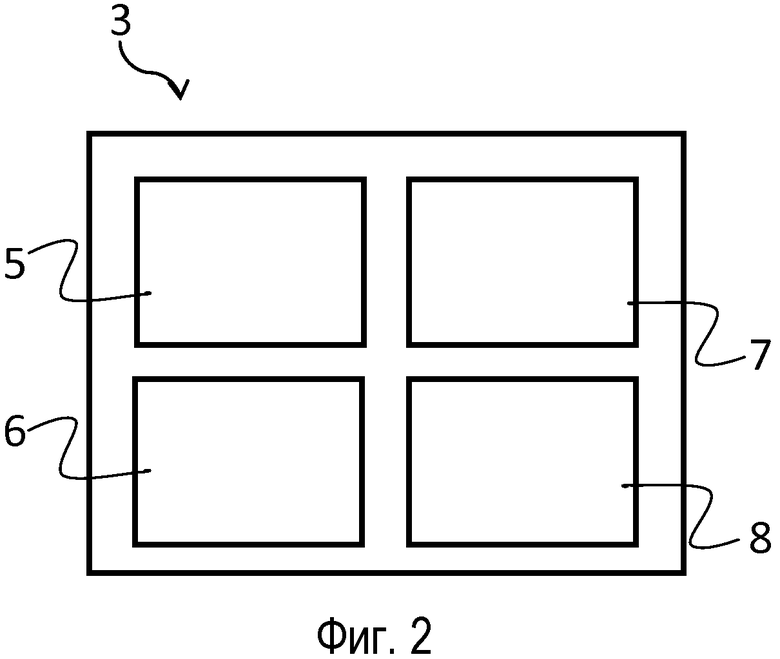
Фиг. 2 является схемой узла в соответствии с вариантом осуществления настоящего изобретения.
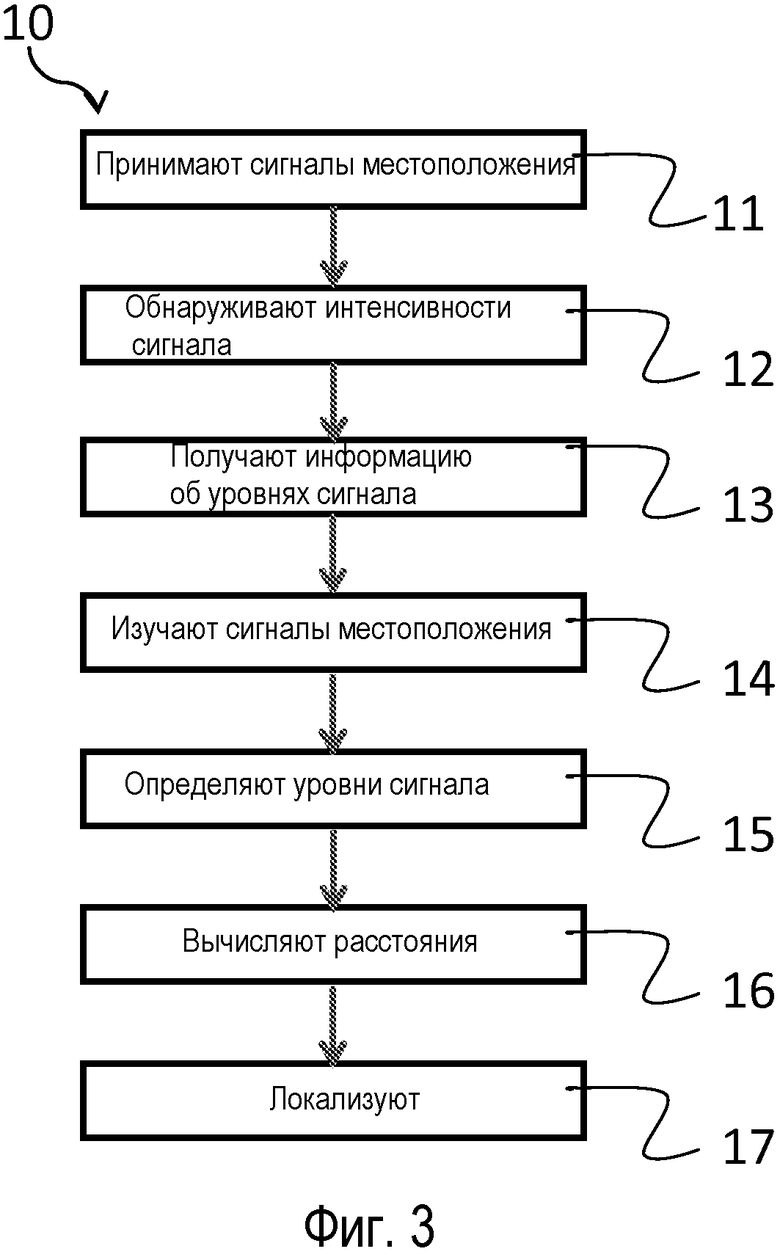
Фиг. 3 является блок-схемой способа в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Теперь ниже изобретение будет описано более полно со ссылкой на сопроводительные чертежи, на которых показаны определенные варианты осуществления изобретения. Тем не менее, данное изобретение может быть воплощено во множестве разных форм и не должно толковаться как ограниченное изложенными здесь вариантами осуществления; наоборот, эти варианты осуществления предоставлены в качестве примера таким образом, чтобы раскрытие было исчерпывающим и законченным, и полностью бы передавало объем изобретения специалистам в соответствующей области. Подобные цифровые обозначения относятся к подобным элементам на всем протяжении описания.
Сеть может быть любой беспроводной сетью, такой как беспроводная сеть датчиков, содержащая узел, такой как узел-датчик, и маяки. Сеть может быть, например, локальной сетью (LAN), использующей, например, Bluetooth, WirelessHART, WiFi и/или Zigbee. Сеть может содержать центральный блок управления, однако также рассматриваются сети без центрального блока управления.
Понятие «промышленное предприятие» должно толковаться в широком смысле, включая в себя любое большое здание, в котором может быть желательно размещение узла в упомянутом здании.
Узел может быть узлом любого типа, таким как узел-датчик. В нижеследующем в качестве примера узла используется узел-датчик, но следует отметить, что также могут быть использованы другие узлы беспроводной сети. Как правило, узел подвижен, вследствие чего растет потребность в его локализации. Он может быть, например, закреплен на грузовом автомобиле или человеке, или любом другом объекте, перемещающемся по предприятию. Узел-датчик может, например, включать в себя воспринимающий блок (также известный как датчик), блок обработки, такой как маломощный процессор, блок хранения, такой как память, и модуль беспроводной связи. Узел может измерять условия среды, выполнять предварительные вычисления, агрегировать, и передавать данные базовой станции или центральному блоку управления. Сотни таких узлов могут образовывать большую беспроводную сеть для осуществления отслеживания в отношении больших предприятий.
Узел-датчик может быть выполнен в виде датчика, например, выполнен в виде датчика для измерения радиации или присутствия потенциально опасного газа, или датчика движения. Узел-датчик может быть выполнен с функцией сигнала тревоги, например, предупреждая человека, который находится поблизости, о том, что уровни радиации или газа слишком большие, или оповещая центральный блок управления или другого человека о том, что человек, на котором закреплен датчик, перестал перемещаться. Тем не менее, также рассматриваются другие типы датчиков. Как правило, на предприятии находится множество узлов-датчиков, и возможно, они должны быть локализованы.
Маяки (также известные как узлы привязки или средства привязки) могут быть любыми маяками, распределенными по предприятию и выполненными с возможностью отправки их соответствующих местоположений узлу-датчику. Маяк может быть узлом, который используется только в качестве маяка для локализации узла-датчика, или он может быть любым узлом, таким как узел-датчик, в беспроводной сети, который также используется в качестве маяка. Как правило, маяк является стационарным, однако в качестве альтернативы он может быть подвижным. Может быть удобным, когда маяк, по сути, стационарен, если он используется для локализации узла-датчика. Маяк выполнен с возможностью передачи информации о своем местоположении через сигналы местоположения узлу-датчику, который должен быть локализован. Данная передача может выполняться непрерывно, периодически, в соответствии с предварительно установленным расписанием, или по запросу со стороны, например, узла-датчика или центрального блока управления. Маяк может знать свое собственное местоположение, например, посредством того, что оператор непосредственно определяет и сохраняет местоположение в нем, что, как правило, используется, когда маяк стационарный, или посредством включения блока GPS, или подобного, как правило, если маяк подвижен. Для того чтобы в достаточной степени локализовать узел-датчик, предпочтительно используются, по меньшей мере, три маяка, которые все находятся в пределах диапазона узла-датчика таким образом, что сигналы местоположения, содержащие информацию о местоположении, передаваемые каждым из маяков, могут быть приняты узлом-датчиком. Тем не менее, может быть удобным использовать более трех маяков, как например, четыре и пять маяков, или вплоть до десяти или двадцати маяков. Большее число маяков в диапазоне узла-датчика может подразумевать большую точность локализации узла-датчика. Если узел-датчик должен быть локализован в трех измерениях, например, что касается его высоты в дополнение к локализации в горизонтальной плоскости, то может быть удобным использовать, по меньшей мере, четыре маяка, при этом предпочтительно, что, по меньшей мере, два из упомянутых маяков располагаются на разных высотах.
Сигналы местоположения включают в себя информацию о местоположении, т.е. информацию о местоположении/позиции маяка, который оправляет сигналы местоположения. Сигналы местоположения могут быть общими сигналами связи. Информация о местоположении может, например, включать в себя X и Y координаты, задающие позицию маяка на плоскости промышленного предприятия. Плоскостью может быть, например, этаж предприятия. Может быть желательным локализовать узел-датчик в трех измерениях, и в этом случае информация о местоположении может, например, также включать в себя Z координату, например, задавая высоту над плоскостью пола. Координаты могут быть в локальной системе координат предприятия, или они могут быть системы глобального позиционирования. Информация о местоположении, дополнительно или в качестве альтернативы, включает в себя информацию о местоположении, отличную от координат, например, информацию о том, в какой части предприятия располагается маяк или где он располагается по отношению к (например, на расстоянии от) конкретной позиции на предприятии, или любую другую информацию, которая может позволить узлу-датчику сделать выводы о местоположении маяка.
По меньшей мере, один, удобно когда все, из маяков использует динамическую мощность передачи при передаче сигналов местоположения. Это предполагает, что используемая мощность передачи, может меняться с течением времени, при передаче сигналов местоположения. Таким образом, маяк может последовательно осуществлять передачу на разных уровнях сигнала, таких как разные уровни мощности, но, как правило, не осуществлять передачу на разных уровнях сигнала одновременно. Как правило, маяк может осуществлять передачу на уровне сигнала, который меньше его максимального уровня сигнала, для того чтобы сэкономить энергию, уменьшить помехи в отношении других передач, уменьшить изделие передатчика маяка и т.д. Если узел-датчик, или любой другой приемник сигналов, передаваемых маяком, не принимает передачу достаточно четко, то он может проинформировать об этом маяк, например, посредством запроса сигналов, которые должны быть отправлены повторно, посредством отправки отрицательной квитанции, NACK, маяку. Затем маяк может выбрать увеличение уровня сигнала передачи сигналов. Как правило, маяк имеет некоторое количество разных предварительно определенных уровней сигнала, которые он может использовать для своих передач, и когда он принимает NACK в отношении передачи, он может повторно отправить передачу, используя следующий более высокий уровень сигнала. Дополнительные NACK могут привести к более увеличенным уровням сигнала до тех пор, пока маяком не будет использована максимальная мощность передачи. Одним протоколом с динамической мощностью передачи, который может использоваться с настоящим изобретением, является протокол Адаптивной Регулировки Мощности (APA).
Узел-датчик содержит блок обнаружения для обнаружения интенсивности сигнала каждого из сигналов местоположения от каждого из маяков. Интенсивность принимаемого сигнала может быть обнаружена как реальная интенсивность принимаемого сигнала (RSS) или, например, как индикация интенсивности принимаемого сигнала (RSSI). Интенсивность принимаемого сигнала зависит от мощности, используемой для передачи сигнала маяком, и от затухания передаваемых сигналов. Затухание может зависеть от расстояния между узлом-датчиком и маяком, но также и от препятствий, отражений, помех и т.д. между ними. Таким образом, затухание может давать указание расстояния между узлом-датчиком и маяком, однако также может быть удобным рассматривать влияние прочих факторов на затухание. При вычислении оценочного расстояния между узлом-датчиком и маяками, таким образом, может быть удобным принимать во внимание общую среду распространения и затухания предприятия.
Узел-датчик получает информацию о разных уровнях сигнала, на которых может осуществлять передачу каждый из маяков. Как упомянуто выше, по меньшей мере, один из маяков использует динамическую мощность передачи. Информация может быть информацией, которая позволяет узлу-датчику сделать выводы в отношении того, какие предварительно установленные уровни сигнала может использовать маяк. Затем данная информация может быть использована для определения того, с какой мощностью маяк передает сигналы местоположения. Другие маяки могут использовать фиксированную мощность передачи, или также они могут использовать динамическую мощность передачи с точно такими же или отличными уровнями сигнала как, по меньшей мере, у одного маяка. Также узлом-датчиком может быть получена информация о мощности передачи любых маяков, использующих фиксированную мощность передачи. Информация об уровне сигнала может быть получена узлом-датчиком от, например, соответствующих маяков или центрального блока управления, передающего ее узлу-датчику, или эмпирически, путем отслеживания интенсивности принимаемого сигнала с течением времени.
Принимаемые сигналы местоположения изучаются узлом-датчиком для того, чтобы определить на каком из (динамических) уровней сигнала маяки передают соответствующие сигналы местоположения. Изучение может содержать выяснение информации о том, какой уровень сигнала был использован в самом сигнале местоположения. Маяк может, например, включать информацию, об используемой мощности передачи, в заголовок пакета сигналов местоположения. Таким образом, сигналы местоположения могут дополнительно содержать информацию о мощности, в отношении того, какой из уровней сигнала используется каждым из маяков для передачи упомянутых сигналов местоположении, и при этом изучение сигналов местоположения содержит получение упомянутой информации о мощности.
В качестве альтернативы или в дополнение, изучение принимаемых сигналов местоположения может содержать отслеживание сигналов местоположения с течением времени, во время которого каждый маяк, использующий динамическую мощность передачи, осуществляет передачу на множестве из его уровней сигнала, таким образом, что могут быть сделаны выводы в отношении того, какой из уровней сигнала каждого из маяков соответствует какой интенсивности принимаемого сигнала. При использовании динамической мощности передачи, такой как при протоколе APA, маяк может осуществлять передачу на разных уровнях сигнала в зависимости от условий передачи и приема. Узел-датчик, отслеживая это, может в итоге наблюдать все, или, по меньшей мере, большую часть уровней сигнала передачи, доступных маяку, тем самым узел-датчик может с достаточной точностью связать определенную интенсивность принимаемого сигнала с одним из уровней сигнала передачи. Удобно, когда одним из уровней сигнала передачи, наблюдаемых узлом-датчиком, является максимальная мощность передачи маяка, что позволяет узлу-датчику с высокой уверенностью связать данную интенсивность принимаемого сигнала с максимальной мощностью передачи маяка, получаемой, как рассматривается выше.
Вместо лишь пассивного изучения интенсивностей сигнала сигналов местоположения, узел-датчик может активно запрашивать, по меньшей мере, один маяк в отношении осуществления передачи на разных уровнях сигнала, например, посредством отправки отрицательных квитанций, как рассматривалось выше, предпочтительно до тех пор, пока маяк не достигнет своей максимальной мощности передачи, позволяя узлу-датчику с высокой уверенностью связать данную интенсивность принимаемого сигнала с максимальной мощностью передачи маяка, получаемой, как рассматривается выше. Таким образом, способ изобретения может включать в себя этап, на котором отправляют отрицательную квитанцию, NACK, по меньшей мере, одному маяку в ответ на прием сигналов местоположения, тем самым запрашивая у маяка осуществление передачи на множестве уровней сигнала. Предпочтительно, NACK отправляются в ответ на принимаемые сигналы местоположения до тех пор, пока сигналы местоположения, по меньшей мере, от одного маяка не будут оправлены на максимальном уровне сигнала.
На основании обнаруженной интенсивности принимаемого сигнала сигналов местоположения от каждого из маяков и соответствующей определенной мощности передачи маяков, может быть вычислено оценочное расстояние от узла-датчика до каждого из маяков. Оценочное расстояние между узлом-датчиком и одним из маяков может быть вычислено посредством сравнения интенсивности принимаемого сигнала сигналов местоположения с мощностью передачи, используемой для отправки сигналов. Как упомянуто выше, особые условия затухания предприятия могут быть приняты к рассмотрению при оценке расстояний. Вкратце, степень затухания сигналов соответствует расстоянию между маяком, отправляющим сигналы, и узлом-датчиком, принимающим сигналы.
Оценив расстояния до маяков, узел-датчик может локализовать себя, поскольку соответствующие позиции маяков известны, а также расстояние до каждого из них. Тем не менее, поскольку присутствуют источники ошибки, например, помехи сигналов между маяком и узлом-датчиком, то может быть не найдена ни одна точная точка, удовлетворяющая уравнению, которое формируется вышеприведенными условиями. Вместо этого, может быть не найдена ни одна точка или множество точек. Следовательно, разные позиции маяка могут быть взвешены, например таким образом, что наиболее близкому маяку (в соответствии с оценочными расстояниями) задается наивысший весовой коэффициент для его информации о местоположении, такой как координаты, при локализации узла-датчика. Оставшиеся маяки также могут быть взвешены в очередности их близости к узлу-датчику, таким образом, что информации о местоположении маяка, который оценен как находящийся наиболее удаленно от узла-датчика, задается наименьший весовой коэффициент. Пример вычисления взвешенной локализации в двумерной системе приводится ниже посредством Уравнения 1.









Весовой коэффициент 



Теперь со ссылкой на фигуры будут рассмотрены конкретные варианты осуществления настоящего изобретения.
Со ссылкой на Фиг. 1, беспроводная сеть 1 содержит центральный блок управления или базовую станцию 2 и множество узлов 3 и маяков 4. Центральный блок 2 управления выполнен с возможностью осуществления беспроводной связи и управления как с узлами 3, так и маяками 4. Для простоты, на фигуре показано только два узла 3a-b, однако беспроводная сеть 1 может включать в себя гораздо больше узлов 3, как например, более сотни узлов 3. Как правило, беспроводная сеть 1 может содержать узлов 3 гораздо больше, чем маяков 4.
Узел 3a имеет три маяка 4a-c в пределах диапазона связи (как указано пунктирными линиями на Фиг. 1), посредством которых он может локализовать себя в соответствии с настоящим изобретением.
Узел 3b имеет пять маяков 4c-g в пределах диапазона связи (как указано пунктирными линиями на Фиг. 1), посредством которых он может локализовать себя в соответствии с настоящим изобретением. Для повышения точности локализации может быть преимущественным для узла 3 обладать настолько большим количеством маяков 4, насколько это возможно в пределах диапазона. Таким образом, узел 3b может быть локализован с большей точностью, чем узел 3a. Тем не менее, на точность локализации могут оказывать влияние прочие факторы. Следует отметить, что в пределах диапазона маяка 4c находится как узел 3a, так и узел 3b.
Предполагается, что как только узел 3 локализует себя, он может функционировать в качестве маяка 4 для других узлов 3.
Теперь возвращаясь к Фиг. 2, узел 3 может содержать приемник 5, блок 6 обнаружения, блок 7 хранения и блок 8 обработки. Приемник 5 выполнен с возможностью приема сигналов местоположения, передаваемых каждым, по меньшей мере, из трех маяков 4 (Фиг. 1). Блок 6 обнаружения выполнен с возможностью обнаружения интенсивностей принимаемого сигнала сигналов местоположения, передаваемых маяками 4. Блок 7 хранения выполнен с возможностью хранения информации о разных уровнях сигнала, на которых могут осуществлять передачу маяки 4. Блок 8 обработки выполнен с возможностью обработки информации, принимаемой, обнаруживаемой и сохраняемой приемником 5, блоком 6 обнаружения и блоком 7 хранения, для локализации узла 3. Таким образом, блок 8 обработки выполнен с возможностью изучения принимаемых сигналов местоположения, определения уровней сигнала, используемых каждым из маяков 4 для передачи сигналов местоположения, на основании изучения принимаемых сигналов, вычисления расстояния до каждого из маяков 4 на основании обнаруженных интенсивностей сигналов и определенных уровней сигналов, и локализации узла 3 посредством принимаемой информации о местоположении и вычисляемых расстояний. Следует отметить, что блок обработки может содержать множество суб-блоков, которые могут располагаться в разных частях узла 3, с возможностью осуществления связи друг с другом.
Фиг. 3 является блок-схемой конкретного способа 10 настоящего изобретения.
Узел 3 принимает (этап 11 способа), посредством приемника 5, сигналы местоположения, передаваемые каждым, по меньшей мере, из трех маяков 4, причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков, при этом сигналы местоположения, по меньшей мере, от одного из маяков передаются маяком с использованием динамической мощности передачи, посредством чего маяк может непрерывно передавать сигналы местоположения на множестве разных предварительно определенных уровней сигнала.
При приеме сигналов местоположения, узел 3 также обнаруживает (этап 12), посредством блока 6 обнаружения, соответствующие интенсивности принимаемого сигнала принимаемых сигналов местоположения, т.е., таким образом, измеряется и обнаруживается интенсивность принимаемого сигнала сигналов местоположения, передаваемых, по меньшей мере, одним маяком 4 с использованием динамической мощности передачи, а также интенсивности принимаемого сигнала сигналов местоположения, передаваемых каждым и других, по меньшей мере, трех маяков 4, каждый из которых может использовать динамическую мощность передачи или использовать статическую мощность передачи.
Узел 3 получает (этап 13) информацию о разных уровнях сигнала, на которых могут осуществлять передачу маяки 4. Узел 3 хранит информацию посредством блока 7 хранения. Информация о мощности может быть получена до, во время или после любого из предшествующих этапов 11 и 12, а также этапа 14 ниже. Информация о мощности может, например, содержать реальный уровень(и) сигнала, на котором осуществляет передачу каждый из маяков 4, или числовой индекс или подобное, который соответствует реальному уровню(ям) сигнала, на котором осуществляет передачу каждый из маяков 4. В случае, когда, по меньшей мере, один маяк 4, а также когда любые из прочих маяков 4, использует динамическую мощность передачи, информация охватывает предварительно установленные уровни сигнала, которые он может использовать.
Узел 3 изучает (этап 14) принимаемые сигналы местоположения. Как рассмотрено выше, данное изучение может, например, содержать, для каждого, по меньшей мере, из трех маяков 4, получение информации об уровне сигнала маяка 4, используемом для его передачи его сигналов местоположения, которая содержится в сигналах местоположения (например, реальную мощность передачи, или числовой индекс, соответствующий реальной мощности передачи), или изучение интенсивности принимаемого сигнала с течением времени от маяка 4.
На основании изучения на этапе 14, узел 3, посредством блока 8 обработки, определяет (этап 15) уровни сигнала, используемые каждым из маяков для передачи сигналов местоположения, на основании изучения принимаемых сигналов. Вновь, эти уровни сигнала могут быть фиксированными уровнями сигнала (один для каждого маяка) для любых маяков 4, использующих статичную мощность передачи, и одним из множества предварительно установленных уровней сигналов для каждого из маяка(ов) 4, использующих динамическую мощность передачи, такую как по протоколу APA.
На основании обнаруженных интенсивностей сигнала и определенных уровней сигнала, узел 3 вычисляет (этап 16), посредством блока 8 обработки, расстояние до каждого из маяков 4, т.е. одно расстояние до каждого маяка 4. Данное расстояние может быть вычислено благодаря затуханию сигналов, по мере того как они распространяются на расстоянии между маяком 4 и узлом 3.
В заключение, узел 3 обладает информацией, требуемой для локализации (этап 17), посредством блока 8 обработки, себя, используя принимаемую информацию о местоположении и вычисляемые расстояния. Когда узел 3 знает местоположение каждого, по меньшей мере, из трех маяков 4 и расстояние до каждого из упомянутых маяков 4, то упомянутый узел может быть локализован. Как рассмотрено выше, может быть использован взвешенный подход.
В соответствии с конкретным аспектом настоящего изобретения, оно относится к способу для локализации узла в беспроводной сети, при этом способ содержит этапы, на которых: принимают сигналы местоположения, передаваемые маяками, причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков; обнаруживают соответствующие интенсивности принимаемого сигнала принимаемых сигналов местоположения; получают информацию о разных уровнях сигнала, на которых могут осуществлять передачу маяки; изучают принимаемые сигналы местоположения; определяют уровни сигнала, используемые каждым из маяков для передачи сигналов местоположения, на основании изучения принимаемых сигналов; вычисляют расстояние до каждого из маяков, на основании обнаруженных интенсивностей сигнала и определенных уровней сигнала; и локализуют узел посредством принимаемой информации о местоположении и вычисляемых расстояний. Изобретение также относится к узлу и к беспроводной сети.
Изобретение главным образом было описано выше со ссылкой на несколько вариантов осуществления. Тем не менее, как легко понятно специалисту в соответствующей области, варианты осуществления, отличные от тех, что раскрыты выше, в равной степени возможны в рамках объема изобретения, как определено прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОКАЛИЗАЦИЯ, ОСНОВАННАЯ НА СЕТИ ИЗ БЕСПРОВОДНЫХ УЗЛОВ | 2015 |
|
RU2695510C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ | 2015 |
|
RU2699376C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТПРАВКИ АГРЕГИРОВАННОГО СИГНАЛА МАЯКА | 2011 |
|
RU2561723C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ МАЯКОВ ТОЧКИ ДОСТУПА НА РАЗНЫХ УРОВНЯХ МОЩНОСТИ | 2009 |
|
RU2485723C2 |
| ВЫБОР ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2014 |
|
RU2643795C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2713477C1 |
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| УПРАВЛЕНИЕ ОБНАРУЖЕНИЕМ В ОДНОРАНГОВОЙ БЕСПРОВОДНОЙ СЕТИ | 2008 |
|
RU2491726C2 |
| ПОИСК СОТ НА ОСНОВЕ МАЯКА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2433551C2 |
| СПОСОБЫ И УСТРОЙСТВО БЕСПРОВОДНОГО ТЕРМИНАЛА ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ, КОТОРАЯ ИСПОЛЬЗУЕТ МНОГОРЕЖИМНУЮ БАЗОВУЮ СТАНЦИЮ | 2006 |
|
RU2390939C2 |
Изобретение относится к области радиосвязи. Техническим результатом является локализация узла в беспроводной сети. Упомянутый технический результат достигается тем, что принимают сигналы местоположения, передаваемые маяками, причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков; обнаруживают соответствующие интенсивности принимаемого сигнала принимаемых сигналов местоположения; получают информацию о разных уровнях сигнала, на которых могут осуществлять передачу маяки; изучают принимаемые сигналы местоположения; определяют уровни сигнала, используемые каждым из маяков для передачи сигналов местоположения, на основании изучения принимаемых сигналов; вычисляют расстояние до каждого из маяков на основании обнаруженных интенсивностей сигнала и определенных уровней сигнала; и локализуют узел посредством принимаемой информации о местоположении и вычисляемых расстояний. 3 н. и 3 з.п. ф-лы, 3 ил.
1. Способ (10) локализации узла (3) в беспроводной сети (1) промышленного предприятия, при этом способ (10) выполняется в упомянутом узле (3) и содержит этапы, на которых:
принимают (11) сигналы местоположения, передаваемые каждым, по меньшей мере, из трех маяков (4), причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков (4), при этом сигналы местоположения, по меньшей мере, от одного из маяков (4) передаются маяком (4) с использованием динамической мощности передачи, посредством чего маяк (4) непрерывно передает сигналы местоположения на множестве разных предварительно определенных уровней сигнала;
отправляют отрицательную квитанцию, NACK, упомянутому, по меньшей мере, одному из маяков (4) в ответ на прием сигналов местоположения от упомянутого маяка (4), тем самым запрашивая у маяка (4) осуществление передачи на упомянутом множестве уровней сигнала, при этом квитанции NACK отправляют в ответ на принимаемые сигналы местоположения до тех пор, пока сигналы местоположения от упомянутого, по меньшей мере, одного из маяков (4) не будут отправлены на максимальном уровне сигнала;
обнаруживают (12) соответствующие интенсивности принимаемых сигналов местоположения;
получают (12) информацию о разных уровнях сигнала, на которых осуществляют передачу маяки (4);
изучают (14) принимаемые сигналы местоположения;
определяют (15) уровни сигнала, используемые каждым из маяков (4) для передачи сигналов местоположения, на основании изучения (14) принимаемых сигналов;
вычисляют (16) расстояние до каждого из маяков (4) на основании обнаруженных (12) интенсивностей сигнала и определенных (15) уровней сигнала; и
локализуют (17) узел (3) посредством принимаемой (11) информации о местоположении и вычисляемых (16) расстояний;
при этом упомянутый этап, на котором изучают (14) принимаемые сигналы местоположения, содержит этап, на котором отслеживают сигналы местоположения с течением времени, во время которого упомянутый, по меньшей мере, один из маяков (4) осуществляет передачу на множестве его уровней сигнала, таким образом, что могут быть сделаны выводы в отношении того, какой из уровней сигнала упомянутого, по меньшей мере, одного из маяков (4) соответствует какой интенсивности принимаемого сигнала.
2. Способ по п. 1, при этом упомянутый этап, на котором локализуют (17), содержит этап, на котором взвешивают информацию о местоположении, принимаемую от каждого из маяков (4), в зависимости от соответствующих вычисляемых расстояний до упомянутых маяков.
3. Способ по п. 1 или 2, при этом сигналы местоположения дополнительно содержат информацию о мощности в отношении того, какой из уровней сигнала используется упомянутым, по меньшей мере, одним маяком (4) для передачи упомянутых сигналов местоположения, и при этом этап, на котором изучают (14) сигналы местоположения, содержит этап, на котором получают упомянутую информацию о мощности.
4. Способ по п. 1 или 2, при этом узел (3) закреплен на человеке.
5. Узел (3) для беспроводной сети, при этом узел (3) содержит:
приемник (5), выполненный с возможностью приема (11) сигналов местоположения, передаваемых каждым, по меньшей мере, из трех маяков (4), причем сигналы местоположения содержат информацию о местоположениях соответствующих маяков (4), при этом сигналы местоположения передаются, по меньшей мере, одним из маяков (4) с использованием динамической мощности передачи, посредством чего маяк (4) непрерывно передает сигналы местоположения на множестве разных предварительно определенных уровней сигнала;
блок (6) обнаружения, выполненный с возможностью обнаружения (12) соответствующих интенсивностей принимаемых сигналов местоположения;
блок (7) хранения, выполненный с возможностью хранения информации о разных уровнях сигнала, на которых осуществляют передачу маяки (4); и
блок (8) обработки, выполненный с возможностью
отправки отрицательной квитанции, NACK, упомянутому, по меньшей мере, одному из маяков (4) в ответ на прием сигналов местоположения от упомянутого маяка (4), тем самым запрашивая у маяка (4) осуществление передачи на упомянутом множестве уровней сигнала, при этом квитанции NACK отправляются в ответ на принимаемые сигналы местоположения до тех пор, пока сигналы местоположения от упомянутого, по меньшей мере, одного из маяков (4) не будут отправлены на максимальном уровне сигнала, изучения (14) принимаемых сигналов местоположения,
определения (15) уровней сигнала, используемых каждым из маяков (4) для передачи сигналов местоположения, на основании изучения (14) принимаемых сигналов,
вычисления (16) расстояния до каждого из маяков (4) на основании обнаруженных (12) интенсивностей сигнала и определенных (15) уровней сигнала, и
локализации (17) узла (3) посредством принимаемой (11) информации о местоположении и вычисляемых (16) расстояний;
при этом упомянутое изучение (14) принимаемых сигналов местоположения содержит отслеживание сигналов местоположения с течением времени, во время которого упомянутый, по меньшей мере, один из маяков (4) осуществляет передачу на множестве его уровней сигнала, таким образом, что могут быть сделаны выводы в отношении того, какой из уровней сигнала упомянутого, по меньшей мере, одного из маяков (4) соответствует какой интенсивности принимаемого сигнала.
6. Беспроводная сеть (1) промышленного предприятия, при этом сеть (1) содержит:
узел (3) по п. 5;
по меньшей мере, три маяка (4), выполненных с возможностью беспроводной передачи сигналов местоположения узлу (3), при этом, по меньшей мере, один из маяков (4) выполнен с возможностью использования динамической мощности передачи.
| US2007201421 А1, 30.08.2007 | |||
| US2008298387 А1, 04.12.2008 | |||
| US2011105142 A1, 05.05.2011 | |||
| US2010246438 A1, 30.09.2010 | |||
| US2004229621 A1, 18.11.2004 | |||
| US2004203904 A1, 14.10.2004 | |||
| Электрическое устройство для подсчета обработанных деталей на токарных прутковых автоматах | 1951 |
|
SU93545A1 |
| СПОСОБ КОНТРОЛЯ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2279715C2 |

