Перекрестная ссылка на родственные заявки
Настоящая заявка согласно 35 U.S.C. 119(e) испрашивает приоритет по предварительной заявке № 61/443508 под названием "Система датчика давления для применений в имплантации", поданной 16 февраля 2011 г., и по предварительной заявке № 61/443535 под названием "Имплантируемая система шунта с множеством датчиков давления", поданной 16 февраля 2011 г., содержание которых включено в настоящее описание путем отсылки.
Уровень техники, к которому относится изобретение
В прошлом были разработаны имплантируемые датчики давления. Известные датчики давления предназначались в первую очередь для отслеживания, например, внутричерепного давления, внутриплеврального давления и давления крови. Недавно особое внимание было привлечено к отслеживанию и лечению состояния, известного как "гидроцефалия". "Гидроцефалия" так же известная, как водянка головного мозга, является заболеванием, при котором происходит патологическое накопление спинномозговой жидкости (СМЖ) в желудочках или полостях мозга. Это может привести к повышению внутричерепного давления и прогрессивному увеличению головы, конвульсиям, туннельному зрению и умственной неполноценности. Гидроцефалия также может привести к смерти.
В настоящее время существуют датчики давления, которые можно имплантировать в череп на короткий период времени, вплоть до нескольких недель, и которые имеют соединительные провода или каналы, проходящие через рану в скальпе. Такие устройства, например, используются для лечения острых заболеваний, таких как травматические повреждения мозга, или для отслеживания и диагностики хронических заболеваний, например гидроцефалии. Однако такие датчики давления должны иметь определенные свойства, чтобы осуществлять долговременное (более четырех недель) отслеживание давления, и поскольку в настоящее время отсутствуют коммерчески доступные устройства, обладающие всеми необходимыми свойствами, гидроцефалию и травматические повреждения мозга лечат, не пользуясь преимуществами долгосрочной непрерывной информации о внутричерепном давлении. Соответственно, недостатки известных устройств создают жесткие ограничения в области отслеживания эффективности вентрикулоперитонеальных шунтов, которые широко используются для лечения гидроцефалии и травматических повреждений мозга. В таких случаях дополнительную проблему вызывает замена отказавших короткоживущих датчиков, которые создают риск инфекции, сопровождающий использование датчика.
Чтобы датчик мог использоваться для долговременных имплантаций в мозг и для отслеживания, он должен обладать следующими свойствами. Датчики давления должны иметь миниатюрные размеры для облегчения имплантации и минимизации нарушений тканевой среды, окружающей датчик давления, при этом датчики должны использовать беспроводную связь, чтобы не проводить через кожу провода, каналы или другие компоненты. Они должны быть сформированы из стойких к поломке, не токсичных, "вечных", биологически совместимых материалов, чтобы минимизировать реакцию иммунной системы пациента на введение постороннего тела и предотвратить травмирование ткани побочными продуктами коррозии. Имплантированный датчик давления должен выдавать величины давления, которые остаются достоверными на протяжении всего срока службы датчика, чтобы можно было с уверенностью принимать решения относительно лечения и исключить необходимость извлечения датчика для регулировки. Соответственно, датчик должен иметь такую конструкцию, чтобы точность измерений сохранялась в пределах заданного допуска вне зависимости от физических движений, изменения температуры и другого воздействующего на него влияния окружающей среды. Дополнительно, поскольку физиологические параметры, такие как внутреннее давление, измеряются относительно атмосферного давления, окружающего пациента, система, включающая имплантированный датчик давления, должна обладать способностью учитывать атмосферное давление вокруг пациента. В этом случае требуется применять внешний контроллер, например, содержащий надежный и точный прибор считывания давления.
В прошлом предпринимались попытки решить проблему измерения внутреннего давления. Например, в патенте США 4846191 на имя Brockway et al. описано измерение физиологического давления путем введения передающего давление катетера в кровеносный сосуд или в другую структуру, давление внутри которой требуется измерить. Аспекты этого устройства включают использование гибкого катетера для передачи измерений давления от места имплантации на датчик давления, расположенный на некотором расстоянии от этого места. Типично датчик давления внедрен в скальп или установлен под кожей. Катетер удлинен, заполнен жидкостью с низкой вязкостью и запечатан гелем. Поскольку катетер является податливым, передача точных и достоверных величин давления не гарантируется. Применение удлиненных катетеров, заполненных текучей средой, для измерения сигналов давления от бокового желудочка также описано в патенте США 4519401 на имя Ko and Leung. Система, описанная в этом патенте, имеет те же недостатки, что и известные устройства, в которых используются заполненные текучей средой катетеры, поскольку точность и достоверность измерений давления остаются ненадежными. Другим примером является патент США 3697917 на имя Orth et al., в котором раскрывается планарная кремниевая диафрагма, соединенная анодной сваркой с цилиндрической стеклянной опорой и установленная в металлической трубке с помощью уплотнительного кольца круглого сечения. Отклонения диафрагмы измеряют пьезорезистивными тензодатчиками, которые имеют металлические проволочные проводники, выходящие за пределы корпуса датчика в среду, окружающую этот корпус. Это устройство имеет крайне ограниченное применение, поскольку оно не является имплантируемым, так как корпус не уплотнен и не может быть выполнен герметичным из-за использования и ориентации уплотнительного кольца круглого сечения. Еще одним примером является патент США 3958558 на имя Dunphy et al., где описан датчик давления, содержащий коаксиально переменный конденсатор или коаксиально переменный индуктор в альтернативных компоновках, где сильфон механически соединен с переменным компонентом для изменения значения компонента в ответ на изменение давления текучей среды, в которую погружен сильфон. Изменение значения компонента с помощью сильфона приводит к изменению резонансной частоты LC-цепи, которая воспринимается внешним источником колебательной энергии переменной частоты, который, в свою очередь, указывает на измеряемый уровень давления текучей среды. Долговременная надежность и точность измерений давления описанного датчика остается под вопросом, по меньшей мере потому, что применяемая механическая конструкция сильфона и коаксиально переменных компонентов испытывает гистерезис и усталость материала, что приводит к дрейфу калибровки.
Сущность изобретения
Настоящее изобретение направлено на создание герметично уплотненного биологически совместимого датчика давления, идеально подходящего для имплантации. Хотя описанная в настоящем документе система датчика давления является предпочтительной для множества стратегий отслеживания и лечения, она особенно предпочтительна в задачах, связанных с имплантацией в мозг, например, при отслеживании давлений, возникающих при гидроцефалии и в других задачах по измерению внутричерепного давления. Важной особенностью настоящего изобретения является отсутствие каких-либо заполненных текучей средой катетеров для передачи значений давления из нужного места на обрабатывающую электронику. Соответственно, имплантируемая система датчика давления по настоящему изобретению содержит пластину основания, имеющую первую и вторую обращенные в противоположные направления стороны, при этом пластина основания содержит порт ввода давления, продолжающийся между пластиной основания между упомянутыми обращенными в противоположные направления сторонами. Модуль датчика давления установлен на первой стороне пластины основания и содержит датчик давления, расположенный на порте ввода, чтобы непосредственно измерять давление в порте ввода на второй стороне пластины основания и выдавать сигнал давления, соответствующий измеренному давлению.
Электронная схема установлена на первой стороне пластины основания, и электрически соединена с модулем датчика давления, и выполнена с возможностью обрабатывать сигнал давления так, чтобы передавать его на внешний контроллер. На первой стороне пластины основания расположена внутренняя катушка, которая электрически соединена с электронной схемой и выполнена с возможностью принимать сигнал питания для подачи электрического питания на по меньшей мере электронную схему и передавать сигнал данных, соответствующий сигналу давления. Датчик давления герметично уплотнен с помощью крышки, прикрепленной на первой стороне пластины основания так, чтобы образовать герметично уплотненный корпус для модуля датчика, электронной схемы и внутренней катушки. Таким образом, настоящее изобретение предусматривает двухступенчатую систему передачи питания, которая содержит передачу питания/данных первой ступени от внешней катушки на подкожную наружную катушку, где электромагнитная энергия передается через и сквозь кожу, покрывающую череп, и передачи питания/данных второй ступени, на котором электромагнитная энергия передается от наружной катушки на внутреннюю катушку.
Система датчика давления дополнительно содержит наружную катушку, имеющую первую и вторую катушки, при этом первая катушка сконфигурирована для помещения рядом с внутренней катушкой для образования электромагнитной связи с ней, а вторая катушка расположена на расстоянии от первой катушки и сконфигурирована для подкожного размещения рядом с черепом пациента и выполнена с возможностью приема сигналов данных и питания от внешней катушки, расположенной рядом со второй катушкой. Система датчика давления дополнительно содержит блок внешнего контроллера, соединенный с внешней катушкой, при этом внешняя катушка имеет электромагнитную связь с наружной катушкой, и блок контроллера сконфигурирован, по меньшей мере, для приема сигналов данных, исходящих от модуля датчика давления, и передачи сигналов питания для питания электронной схемы. Поскольку физиологические давления пациента измеряются относительно атмосферного давления, внешний контроллер содержит датчик атмосферного давления, чтобы показывать либо а) давление, измеренное модулем датчика давления, либо b) разницу между атмосферным давлением и давлением, измеренным модулем датчика давления.
Иллюстративный вариант осуществления изобретения включает в себя применение трех модулей датчика давления, расположенных внутри шунта, который содержит клапан управления расходом текучей среды. Такая конфигурация находит критическое применение при лечении гидроцефалии, когда требуется обязательно экстрагировать избыток жидкости из черепа пациента, для сброса избыточного давления, приводящего к появлению боли, неправильному функционированию мозга и к другим трагическим эффектам такого состояния, таким как необратимые повреждения мозга. Использование трех датчиков давления, стратегически расположенных в шунте, дает критическую и надежную информацию об общем состоянии шунта и о том, закупорен ли шунт, положение закупоренного участка шунта, если такой имеется, и информацию о неисправности клапана.
Иллюстративный вариант осуществления изобретения содержит датчик давления и связанные с ним магнитные катушки, встроенные в наконечник шунта для измерения давления жидкости снаружи от шунта в его наконечнике.
Что касается структуры устройства, имплантируемый датчик давления сконфигурирован для удовлетворения требованиям и правилам Управления по надзору за продуктами и лекарствами США, относящимся к имплантируемым устройствам, сведенным в раздел 21 Кодекса федеральных постановлений США. Кроме того, для тех вариантов применения, которые предусмотрены изобретением, имплантируемый датчик давления хирургически внедряется в место требуемого отслеживания давления.
Краткое описание чертежей
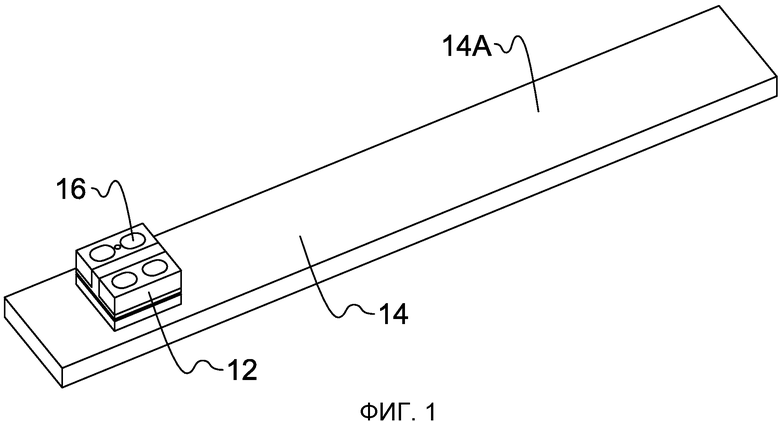
Фиг. 1 - вид в перспективе датчика давления, установленного на пластине основания устройства датчика давления по настоящему изобретению.
Фиг. 2 - частичный вид в перспективе устройства датчика давления по фиг. 1, иллюстрирующий окно в пластине основания для обеспечения считывания давления в среде в организме.
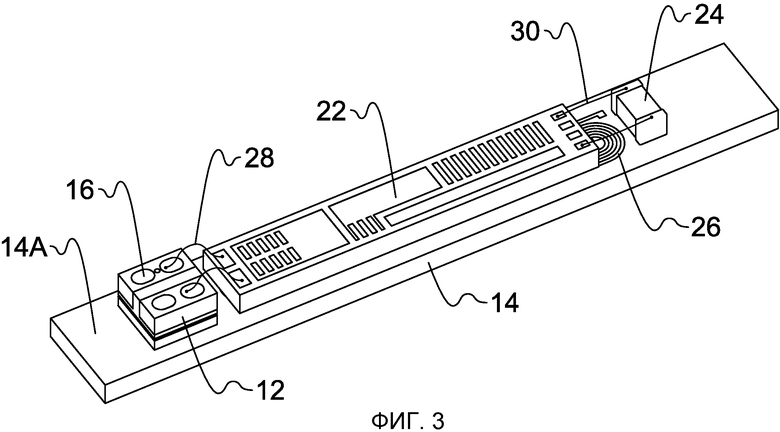
Фиг. 3 - вид в перспективе пластины основания, иллюстрирующий различные компоненты, смонтированные на пластине основания.
Фиг. 4 - вид в перспективе устройства датчика давления, содержащего крышку, прикрепленную к пластине основания по фиг. 1.
Фиг. 5 - вид в перспективе наружной катушки, прикрепленной к пластине основания устройства датчика давления по фиг. 4.
Фиг. 6 - вид системы отслеживания внутричерепного давления, содержащей устройство датчика давления, внешнюю катушку и внешний контроллер.
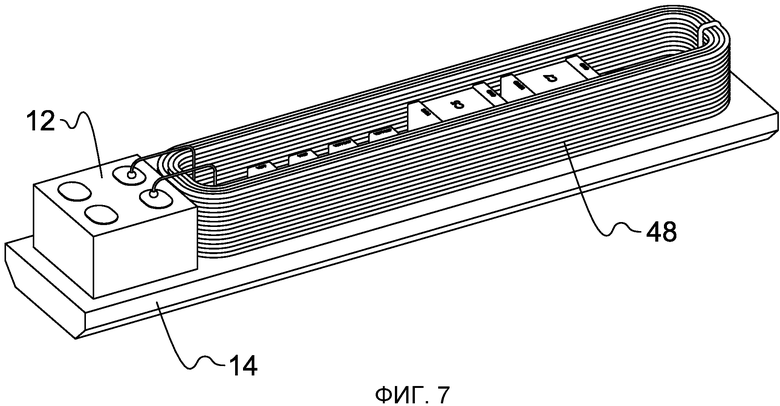
Фиг. 7 - вид в перспективе датчика давления, пассивных компонентов и внутренней катушки, смонтированных на пластине основания по фиг. 1.
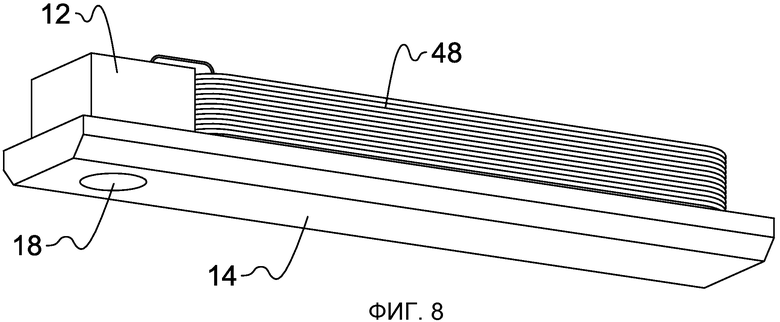
Фиг. 8 - вид в перспективе по фиг. 7, иллюстрирующий окно в пластине основания.
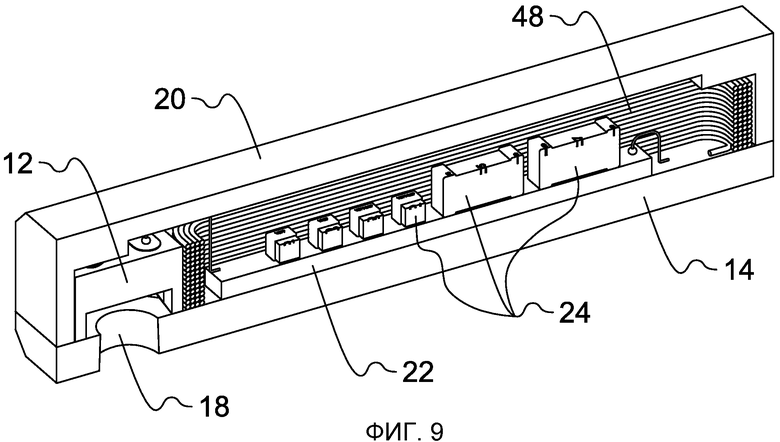
Фиг. 9 - вид в перспективе в сечении по линии А-А на фиг. 4.
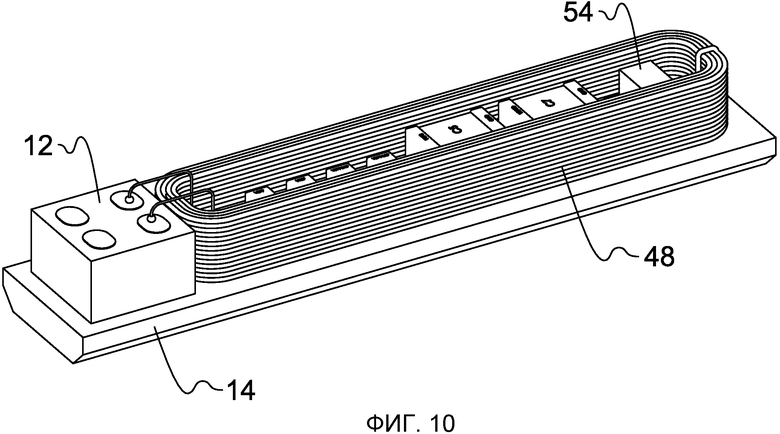
Фиг. 10 - вид в перспективе стеклянной пластины, иллюстрирующий аккумуляторную батарею или конденсатор большой емкости, смонтированный на пластине основания.
Фиг. 11 - вид в перспективе в сечении по линии А-А на фиг. 4, включая аккумуляторную батарею или устройство накопления энергии большой емкости.
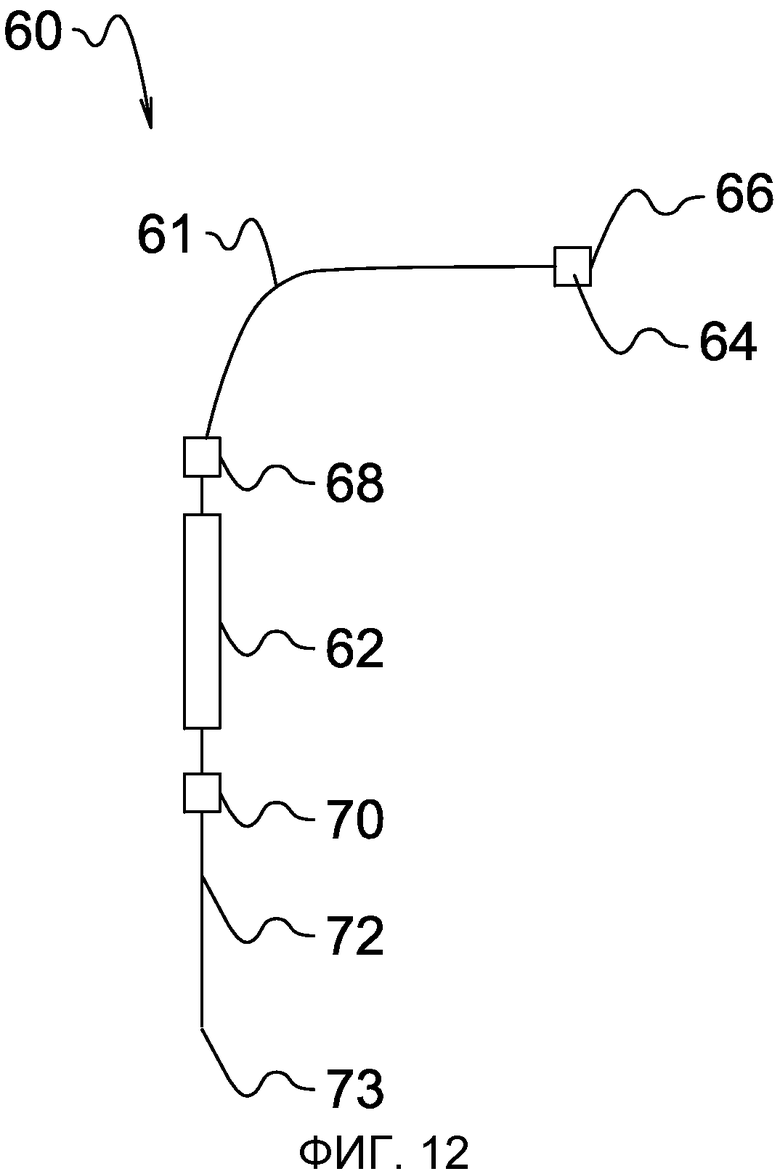
Фиг. 12 - схематичный чертеж датчиков давления и клапана регулирования расхода, расположенных вдоль имплантируемого шунта.
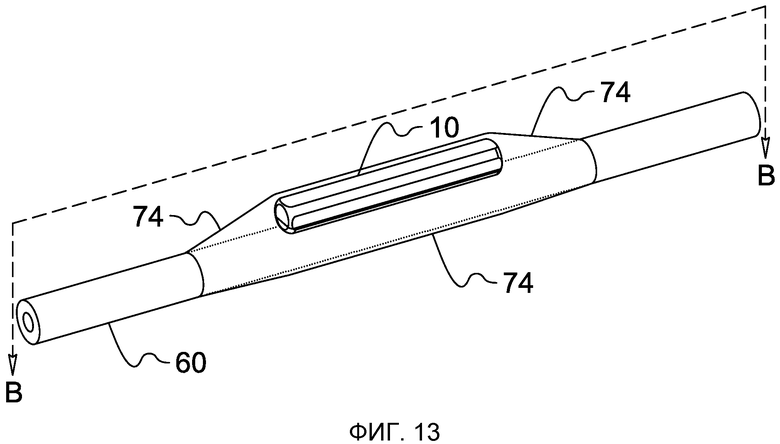
Фиг. 13 - вид в перспективе с пунктирным разрезом датчика давления, смонтированного на имплантируемом шунте.
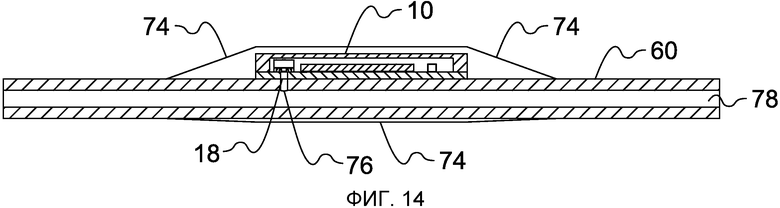
Фиг. 14 - частичное сечение датчика давления, смонтированного на имплантируемом шунте.
Фиг. 15А - схематичный вид трех датчиков давления, установленных на имплантируемом шунте, где только один датчик прикреплен к катушке для передачи питания и данных.
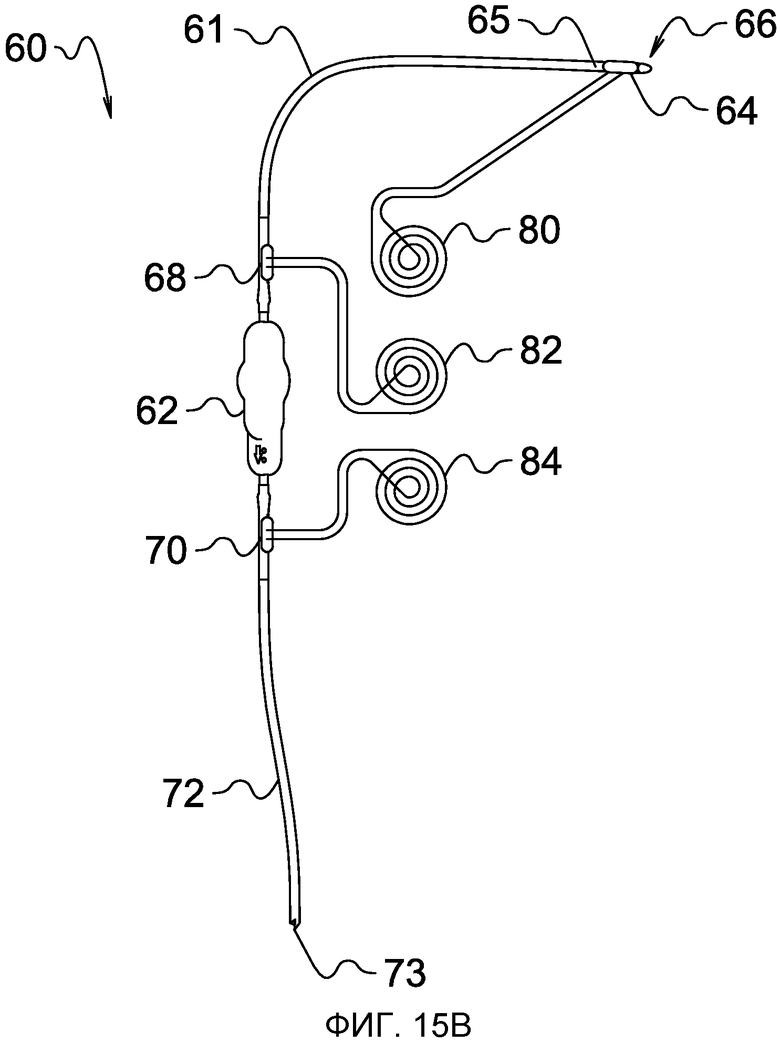
Фиг. 15В - схематичный вид трех датчиков давления, установленных на имплантируемом шунте, где каждый датчик прикреплен к соответствующей катушке для передачи питания и данных.
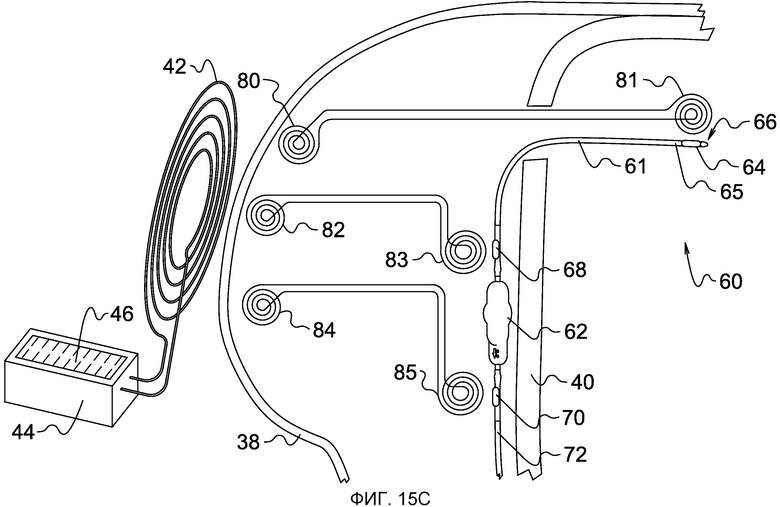
Фиг. 15С - схематичный вид полной системы, где три датчика давления установлены на имплантируемый шунт, где каждый датчик прикреплен к соответствующей катушке для передачи питания и данных в сочетании с внешним контроллером.
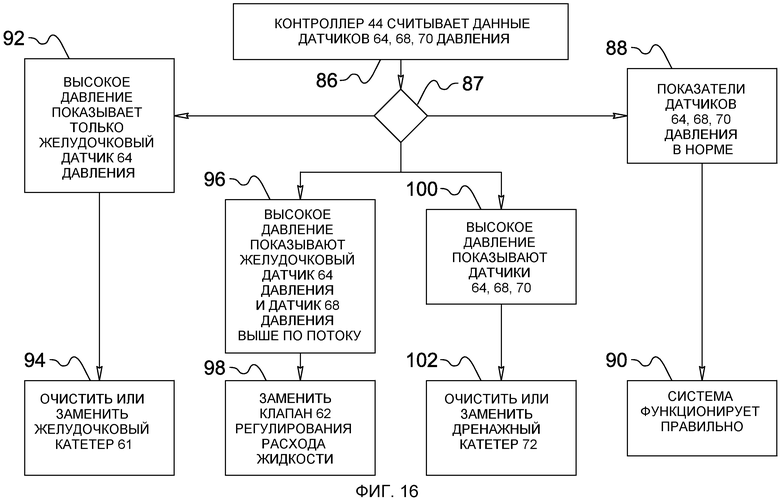
Фиг. 16 - диаграмма последовательности вариантов лечения пациента на основе показаний датчика давления, и
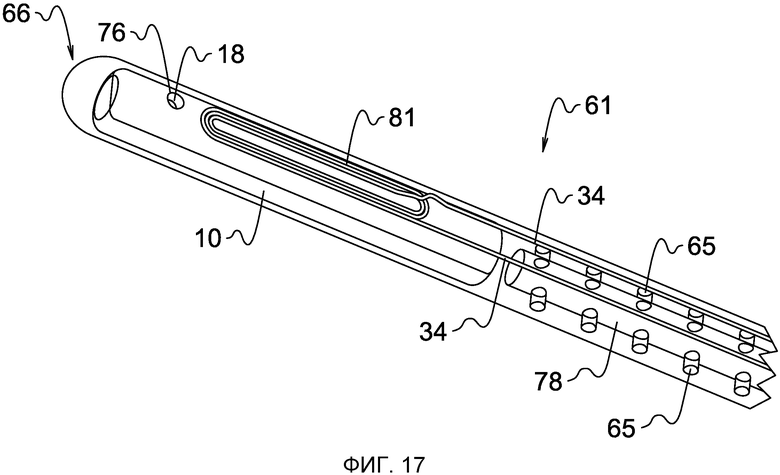
Фиг. 17 - вид в перспективе модуля датчика давления и соответствующих электромагнитных катушек, встроенных в наконечник шунта.
Подробное описание изобретения
Со ссылкой на фиг. 1 показан вид в перспективе устройства 12 датчика давления (далее именуемое "датчик давления"), установленного на удлиненной пластине 14 основания. Как более подробно будет описано ниже, пластина 14 основания предпочтительно сформирована из непроводящего электричество материала, например, стекла. Датчик 12 давления, который расположен внутри модуля 10 датчика давления (см. фиг. 4), можно выбрать из множества коммерчески доступных датчиков давления на основе кремния, в которых применяются емкостные или тензометрические технологии определения давления. Датчик давления по настоящему изобретению изготовлен с использованием микроэлектромеханической системы или технологии MEMS. Соответственно, датчики давления имеют относительно небольшие размеры, типично 2×2×1 мм или менее. Датчик давления по настоящему изобретению содержит чувствительную к давлению кремниевую мембрану, которая открыта в окружающую среду, давление в которой измеряется. Мембрана является одним элементом микроэлектромеханического устройства с электродом (электродами), расположенными параллельно мембране на противоположной стороне мембраны, которая открыта в окружающую среду, давление которой должно быть измерено. Свойством мембраны является способность к отклонению под действием давления и изменения давления. Когда мембрана отклоняется в пределах своего нормального диапазона упругости, возникает почти идеально линейная реакция на приложенное давление с пренебрежимо малой или не измеряемой ошибкой, вызванной усталостью или гистерезисом. Кроме того, из модуля датчика давления не выходит никаких проводов, поэтому модуль 10 датчика давления герметично уплотнен.
Далее, в случае емкостного датчика давления конденсатор имеет два электрода 16, один из которых прикреплен к мембране или электрод сам является мембраной. Любое отклонение мембраны под действием давления и изменений давления приводит к соответствующему изменению величины емкости микроэлектромеханического устройства. Поэтому величина емкости датчика меняется как функция давления, приложенного к мембране, и ее можно измерить средствами электронной схемы, обрабатывающей сигнал. Интегральная схема (микросхема), соединенная с микроэлектромеханическим устройством, обрабатывает такие изменения значения емкости для изменения нагрузки на катушку индуктивности, которая дополнительно отслеживается внешней катушкой и внешним контроллером, как мера значения давления.
В случае датчика давления на основе тензодатчика тензодатчики монтируются на мембране, или мембрана сама образует тензодатчик. Любое отклонение мембраны под влиянием приложенного давления изменяет уровень напряжения на датчике, который можно точно измерить известными схемами измерения электронных сигналов.
Для правильной работы датчика 12 давления одна поверхность мембраны (не показана) образует стенку уплотненной полости внутри датчика давления, а другая поверхность (поверхность считывания давления) мембраны ориентирована так, чтобы быть открытой в окружающую среду, давление которой измеряется. Поверхность считывания давления мембраны может быть покрыта силиконовым гелем для защиты мембраны от непосредственного контакта с биологическими жидкостями и тканями. Покрытие из силиконового геля уменьшает эффекты дрейфа датчика давления, препятствуя контакту агрессивных биологических жидкостей с мембраной и предотвращая прорастание клеток и тканей.
Главной проблемой является поддержание долговременной стабильности датчика 12 давления. Соответственно, датчик 12 давления монтируют на обращенную внутрь поверхность 14А пластины 14 основания так, чтобы исключить долговременные изменения, вызванные остаточными механическими напряжениями после процесса монтажа. Кроме того, датчик 12 давления должен монтироваться так, чтобы не допустить каких-либо потенциально коррозионных процессов в среде в организме, в которой он работает, а также отделить любые электронные компоненты и схемы от среды в организме. Предпочтительным способом монтажа датчика 12 давления на пластине 14 основания является анодная сварка кремниевой части датчика 12 давления с пластиной 14 основания, которую также можно описать как стеклянная подложка. Преимущества анодной сварки включают в себя обеспечение соединения с низким напряжением между кремниевой частью датчика 12 давления и пластиной 14 основания, а также отсутствие необходимости в разнородном связующем материале между стеклом и кремнием. Что касается пластины 14 основания, хотя приемлемым является выбранный состав стекла, предпочтительными являются Pyrex (пирекс, тугоплавкое борное стекло), стекло Borofloat (боросиликатное стекло), стекло SD-2 или стекло с высоким содержанием натрия. Процесс анодной сварки требует температуры около 300-400°С и напряжений около 500-2000 В. Герметичное соединения с низким уровнем напряжений между датчиком 12 давления и пластиной 14 основания способствует снижению эффекта дрейфа датчика 12 давления. Кроме того, как показано на фиг. 9 и описано ниже, кремниевая крышка 20 соединена с обращенной внутрь поверхностью 14а пластины 14 основания так, чтобы сформировать герметичное уплотнение между кремниевой крышкой 20 и пластиной 14 основания, тем самым изолируя датчик 12 давления и любые имеющиеся активные и пассивные электронные компоненты от любого контакта с агрессивными жидкостями в среде в организме. Как показано на фиг. 2, датчик 12 давления приведен к порту ввода давления или окну 18, которое проходит между обращенной внутрь поверхностью 14А и обращенной наружу поверхностью 14В пластины 14 основания. Окно 18 образует путь сообщения по текучей среде между средой в организме и поверхностью считывания давления мембраны. Таким образом, мембрана открыта для давления, существующего рядом с датчиком 12 давления, и можно проводить соответствующие точные измерения давления.
Со ссылкой на фиг. 3 показана сборка компонентов, смонтированных на обращенной внутрь поверхности 14А пластины 14 основания. Монтаж компонентов на пластине 14 основания показанным способом дает преимущество, позволяющее использовать производственные процессы на уровне пластины для сборки компонентов на единой стеклянной пластине. Настоящее изобретение предусматривает использование кремниевой пластины, имеющей полости, которые согласованы с размерами компонентов на пластине 14 основания. Кремниевая пластина (не показана) соединяется с пластиной 14 основания анодной сваркой. Выбранные компоненты датчика давления, такие как, например, интегральные схемы и пассивные компоненты, можно прочно прикрепить в пределах кремниевой пластины. Преимущество сборки на уровне пластины заключается в том, что производственный процесс является очень экономичным.
Со ссылкой на фиг. 3 показана обращенная внутрь поверхность 14А, на которой смонтирован датчик 12 давления, интегральная схема 22, пассивный компонент 24 и внутренняя катушка 26. Электроды 16, которые образуют сигнальный путь для сигналов измеренного давления от мембраны, соединены с интегральной схемой 22 проволочными соединениями 28. Интегральная схема 22 содержит электронные схемы, которые выполняют формирование выходных сигналов датчика 12 давления в соответствии с измерениями давления, схемы генератора радиочастоты (РЧ) для дальнейшего формирования выходных сигналов в подготовке к передаче на внешнее приемное устройство и схемы выпрямления и накопления энергии, являющиеся источником питания электронных схем интегральной схемы 22. Далее на обращенной внутрь поверхности 14А смонтированы пассивный компонент 24 и внутренняя катушка 26. Пассивный компонент 24 может иметь вид фильтрующих конденсаторов, а внутренняя катушка 26 может иметь вид многовитковой катушки двойного назначения для приема передаваемых извне сигналов переменного тока для выпрямления в интегральной схеме 22, чтобы обеспечить рабочее питание электронных схем, а также для работы в качестве антенны для передачи сигналов, представляющих сигналы обнаруженного и измеренного давления. Интегральная схема 22 соединена с пассивным компонентом 24 проволочными соединениями 30. Пассивный компонент также может быть установлен сверху, в том числе на интегральную схему 22.
Со ссылкой на фиг. 4 показан вид в перспективе модуля 10 датчика давления, который содержит крышку 20, прикрепленную к обращенной внутрь поверхности пластины 14 основания. Как описано выше, крышка 20 предпочтительно выполнена из кремния и прикреплена к пластине 14 основания процессом анодной сварки с низким напряжением. Процесс соединения с низким напряжением предотвращает нежелательный эффект дрейфа, который влияет на показания датчика 12 давления. Как показано на фиг. 4, крышка 20 полностью охватывает компоненты, показанные на фиг. 3, и образует герметично уплотненный контейнер для компонентов, чтобы изолировать от и не допустить попадания жидкостей, имеющихся в среде в организме, в модуль 10 датчика давления. Далее на фиг. 4 показано окно 18, которое образует путь сообщения по текучей среде между поверхностью считывания давления мембраны датчика давления (не показана) и средой в организме. Таким образом, с помощью такого датчика давления можно измерять давление, существующее непосредственно в интересующем месте, без попадания жидкостей из окружающей среды внутрь модуля 10 датчика давления. Более того, поскольку датчик давления расположен непосредственно в нужном для проведения измерений месте, устраняется необходимость в заполненных текучей средой катетерах для передачи величин давления на место, где находится обрабатывающая электроника.
Как показано на фиг. 5, рядом с обращенной наружу поверхностью 14В датчика давления находится наружная катушка 32, выставленная относительно внутренней катушки 26 так, чтобы обеспечить эффективную электромагнитную связь между внутренней и наружной катушками. Наружная катушка 32 является многофункциональной в том, что сигнал переменного тока, появляющийся на катушке, можно передать на внутреннюю катушку 26 для преобразования и подачи электроэнергии для работы интегральной схемы 22. Дополнительно, конденсаторы накопления, соединенные с интегральной схемой 22 или находящиеся в ней, можно достаточно зарядить во время передачи сигнала переменного тока, чтобы подавать на интегральную схему 22 рабочее питание в те периоды, когда передача сигнала переменного тока прерывается. Кроме того, наружная катушка 32 выполнена с возможностью принимать сигналы данных, предпочтительно цифровые РЧ сигналы от внутренней катушки 26, которые представляют измерения, выполненные датчиком 12 давления, и которые преобразованы в РЧ сигналы интегральной схемой 22. Соединение и передача РЧ сигналов между внутренней катушкой 26 и наружной катушкой 32 может выполняться способом, который известен специалистам. Кроме того, преобразование данных измерений давления, выполненных датчиком 12 давления, в РЧ сигналы для подачи на внутреннюю катушку 26 также известно специалистам.
Как показано на фиг. 6, связанные с наружной катушкой 32 электропроводящие выводы 34 способны передавать сигнал от наружной катушки 32 на подкожную катушку 36. Для установки на черепе подкожная катушка 36 предпочтительно расположена между кожей 38 и костью, которая образует череп 40. Длина выводов 34 позволяет установить модуль 10 датчика давления вдали от черепа в случаях, когда такое расстояние необходимо. Хотя на фиг. 6 это не показано, выводы 34 могут быть свернуты для предотвращения натяжения в тех случаях, кода модуль 10 датчика давления движется относительно расположения подкожной катушки 36 в результате, например, движений тела. Для передачи сигналов давления и питания внешняя катушка 42 может быть установлена временно или полупостоянно на внешней части кожи 38 и в функциональном совмещении с подкожной катушкой 36. Электромагнитная связь между внешней катушкой 42 и подкожной катушкой 36 позволяет передавать между этими катушками питание и сигналы данных. Внешняя катушка 42 электрически соединена с внешним контроллером 44 и принимает от него сигналы данных/питания. Соответственно, конструкция по фиг. 6 может быть охарактеризована как двухступенчатая система передачи данных/питания, в которой передача первой ступени возникает между внешней катушкой 42 и подкожной катушкой 36, а передача второй ступени происходит меду наружной катушкой 32 и внутренней катушкой 26.
Внешний контроллер 44 выполнен с возможностью подавать сигнал питания переменного тока и обмениваться информацией с модулем 10 датчика давления. Внешний контроллер 44 определяет измеренное давление с помощью описанной выше конструкции, соединяющей интегральную схему и катушку, и выводит это давление на экран 46 дисплея. Помимо определения измеренного давления внешний контроллер 44 определяет температуру и другие параметры, передаваемые модулем 10 датчика давления, и выводит информацию об этих параметрах на экран 46 дисплея. Внешний контроллер 44 содержит специализированный датчик давления (не показан) для измерения атмосферного давления. Соответственно, например, при измерении внутричерепного давления внешний контроллер 44 может измерять и выводить на дисплей абсолютное внутричерепное давление или разницу между внутричерепным давлением и атмосферным давлением. Внешний контроллер 44 также может менять интенсивность заряжающих сигналов переменного тока. Параметры устройства датчика давления, такие как коэффициент усиления интегральной схемы и пороговые величины сигналов, например, можно регулировать при необходимости через внешний контроллер 44.
Внешний контроллер 44 имеет такой размер, чтобы его можно было удобно держать в руке и, предпочтительно, он содержит внешнюю катушку 42 так, что пользователь может легко установить внешний контроллер 44 рядом со скальпом в том месте, где находится подкожная катушка 36. Когда внешний контроллер 44 обнаруживает, что он находится на удовлетворительном для связи расстоянии от подкожной катушки 36, внешний контроллер 44 передает сигнал питания в течение заранее определенного периода времени и ожидает ответный сигнал от модуля (модулей) 10 датчика давления. Если используется множество модулей датчика давления, модуль (модули) 10 датчика давления можно сконфигурировать для передачи сигналов ответа и параметров и информации последовательно так, чтобы последовательность сигналов одного модуля 10 датчика давления не создавала помех последовательности сигналов от другого модуля 10 датчика давления. Помимо экрана дисплея для визуализации информации внешний контроллер 44 может иметь средства звуковой информации, когда была принятая ожидаемая информация или даже неожиданная информация, например были приняты сигналы ошибки. Другие свойства внешнего контроллера 44 включают способность обрабатывать принятую информацию в выбираемые удобные для пользователя форматы и надежно хранить и передавать беспроводными средствами обработанную параметрическую информацию с соответствующими метками времени и даты. Внешний контроллер 44 может питаться от внутреннего перезаряжаемого источника питания или от сменного источника питания.
Рассматриваются и альтернативные варианты осуществления настоящего изобретения, описываемые ниже. Например, внутренняя катушка 26, как показано на фиг. 3, свернута так, чтобы находиться заподлицо и в полном контакте с обращенной внутрь поверхностью 14А, ее можно свернуть в по существу прямоугольную петлю, отходящую от поверхности 14А, как показано на фиг. 7. Кроме того, внутренняя катушка 48 (см. фиг. 7) может быть намотана на ферритовый сердечник (не показан), чтобы ферритовый сердечник концентрировал электромагнитные поля вокруг внутренней катушки 48 для усиления генерирования сигнала в катушке в результате воздействия таких электромагнитных полей. Эффективность соединения между внутренней катушкой 48 и окружающими ее электромагнитными полями заметно улучшается, особенно, если внутренняя катушка 438 намотана на ферритовый сердечник и совмещена с внешней катушкой 42. Использование интегральной схемы и внутренней катушки с ферритовым сердечником в модуле 10 датчика давления позволяет снизить потребление энергии и надежно обрабатывать сигналы. Поскольку внутренняя катушка 48 установлена вокруг интегральной схемы 22 и, предпочтительно, в контакте с ней, общую длину модуля 10 датчика давления можно уменьшить. Иллюстрация обращенной наружу поверхности пластины 14 основания, показывающая окно 18, внутреннюю катушку 48 и датчик 12 давления, приведена на репрезентативном виде сбоку на фиг. 8.
На фиг. 9 показано продольное сечение модуля 10 датчика давления, иллюстрирующее сборку, показанную на фиг. 7 и 8. Как указано выше, окно 18 обеспечивает путь сообщения по текучей среде от среды в организме к датчику 12 давления. Как указано выше, внутренняя катушка 48 показана установленной вокруг интегральной схемы 22 для более компактной компоновки внутренних компонентов для уменьшения общей длины модуля 10 датчика давления.
На фиг. 10 показан вид в перспективе расположения внутренних компонентов модуля 10 датчика давления с включением аккумуляторной батареи 54, предпочтительно перезаряжаемой аккумуляторной батареи, или устройства накопления энергии большой емкости, такого как конденсатор большой емкости для накопления энергии. Перезаряжаемые аккумуляторные батареи известны и являются надежным долгосрочным источником энергии для поддержки надежной работы модуля 10 датчика давления длительное время без необходимости частой зарядки с помощью переменного электромагнитного поля.
На фиг. 11 показано сечение модуля 10 датчика давления, содержащего интегральную схему 2, на которой установлены компоненты 24 схемы, аккумуляторная батарея 54 или устройство накопления энергии большой емкости, которое расположено рядом с пассивным компонентом 24, и эти компоненты окружены внутренней катушкой 48. Компактная компоновка компонентов, показанная на фиг. 11, обеспечивает эффективную работу датчика давления и минимизирует габариты модуля 10 датчика давления.
Пример применения модуля датчика давления в системе шунта для улучшения лечения гидроцефалии
Как описано выше, гидроцефалия - это заболевание, согласно которому по целому ряду причин объем СМЖ в голове и мозгу пациента увеличивается, и размер желудочков мозга увеличивается с сопутствующим повышением давления и травмированием мозга. В прошлом для лечения гидроцефалии использовались имплантируемые шунтирующие системы, позволяющие дренировать избыток СМЖ в другую часть тела, например в брюшную полость или в камеру сердца. При дренаже СМЖ в брюшную полость шунт именуют вентрикулоперитонеальным шунтом, а в случае дренажа СМЖ в сердце шунт именуют вентрикулоатриальным шунтом. Как известно, шунтирование означает перемещение биологической жидкости, такой как спинномозговая жидкость, из одного места в другое. В терминах устройства шунт является синонимом катетера (трубки), и поэтому шунт и катетер можно использовать взаимозаменяемо для переноса спинномозговой жидкости из желудочка мозга в другую область тела. В биологии термином "полость" называют внутреннее пространство трубчатой структуры, такой как шунт или катетер. Типично, имплантируемый шунт содержит клапан давления для регулирования расхода СМЖ при регулируемой уставке давления. Клапан может быть фиксированным клапаном давления, в котором расход регулируется при заранее определенной уставке давления, или регулируемым клапаном давления, в котором расход регулируется при уставке давления, которую можно подстраивать на основе физиологических параметров. Клапаны давления известны, например клапаны Strata, выпускаемые компанией Medtronic Inc, и клапаны Sophy® и Polaris®, выпускаемые компанией Sophysa, и поэтому их подробное описание опускается.
Распространенной причиной отказа шунта является блокирование канала СМЖ в шунте, что может произойти в различных местах в шунте. Например, блокирование может возникнуть на наконечнике шунта (именуемого вентрикулярным катетером 61) где СМЖ входит в шунт, или на клапане давления, или на выходе или в дистальном участке 60 шунта (также именуемом дренажным катетером) в результате роста ткани на катетере, вокруг него или в самом катетере. Для демонстрации желательности полного отслеживания давления в имплантируемой системе шунта иллюстративный вариант осуществления настоящего изобретения, показанный на фиг. 12, включает измерение давления в желудочках мозга и внутри шунта 60, то есть в полости 78 шунта 60. Более конкретно и со ссылками на фиг. 12, шунт 60 содержит клапан 62 регулирования расхода жидкости, первый датчик 64 давления, расположенный на наконечнике 66 желудочкового катетера 61, второй датчик 68 давления (датчик давления выше по потоку), расположенный в шунте 60 между первым датчиком 64 давления и клапаном 62 регулирования расхода жидкости, предпочтительно расположенный рядом с клапаном 62 регулирования расхода жидкости или непосредственно перед и выше по потоку от него, и третий датчик 70 давления (датчик давления ниже по потоку), расположенный в шунте 60 между клапаном 62 регулирования расхода жидкости и дренажным участком 72 катетера, предпочтительно рядом с клапаном 62 регулирования расхода жидкости. Следует понимать, что датчики 74, 68 и 70 имеют конструкцию модуля 10 датчика давления, описанную выше. С точки зрения размещения наконечник 66 предназначен для установки на месте в голове пациента, в котором следует осуществлять отслеживание давления и из которого следует отводить СМЖ, и входные отверстия 65 являются точкой входа или впуска СМЖ в шунт 60. Участок 72 дренажного катетера имеет выпуск 73 и может быть продлен так, чтобы заканчиваться в брюшной полости или в сердце, в зависимости от обстоятельств, и через этот участок осуществляется дренаж СМЖ.
В терминах ухода за пациентом система шунта, имеющая особым образом расположенные три датчика давления, как описано выше, дает однозначную информацию о функционировании системы шунта. Эта информация может быть использована медицинским персоналом или, в случае автоматической системы отслеживания, эта информация может использоваться для включения сигналов тревоги для привлечения внимания лечащего врача. Диаграмма последовательности на фиг. 16 иллюстрирует варианты лечения пациента, основанные на разных показаниях датчика давления, описанных ниже. Диаграмма последовательности на фиг. 16 также может пониматься как способ определения контроллером 44 рабочего состояния шунта 60 и генерирования сообщений об этом состоянии для пациента и/или врача. Сообщения о состоянии могут быть разных типов, например звуковые сигналы, светодиодная световая индикация состояния, или визуальные сообщения на дисплее 46, или сообщения, посылаемые беспроводным способом по сотовой телефонной сети врачу или в больницу.
Что касается вариантов лечения пациента, если у пациента появляются симптомы повышения внутричерепного давления, информация от датчиков, считанная контроллером 44 (блок 86), поможет определить источники потенциальной опасности в зависимости от измеренных показателей давления, считанных внешним контроллером 44, который затем определяет вариант действий (блок 87) в соответствии со следующими сценариями, чтобы выдать индикацию или инструкцию по выполнению корректирующих действий:
(А) Все три датчика давления показывают нормальное давление (блок 88) и показания датчика, расположенного в желудочке, колеблются в одном ритме с систолой давления крови (BP). В таких условиях можно заключить, что симптомы пациента не связаны с неправильной работой шунта (блок 90).
(В) Показания датчика 64 давления (также известный как желудочковый датчик давления) повышены относительно показаний двух других датчиков давления (блок 92). В таких условиях можно заключить, что желудочковый катетер заблокирован и поэтому не позволяет избытку СМЖ войти в шунт и стечь в место дренажа. В таком случае желудочковый катетер 61 потребует очистки или замены (блок 94), поскольку потенциально любые каналы шунта могут быть закупорены хороидальным сплетением.
(С) Показания и желудочкового датчика 64 давления и датчика 68 давления повышены относительно показаний датчика 70 давления (блок 96). В этих условиях можно заключить, что клапан 62 неисправен и требует очистки или замены (блок 98), и
(D) Все три датчика давления показывают повышенное давление (блок 100). Это указывает на закупорку дренажного катетера 72, который требует очистки или замены (блок 102).
На фиг. 13 показан вид в перспективе полуразреза части шунта 60, к которой прикреплен модуль 10 датчика давления. Шунт 60 может быть изготовлен из любого из множества известных биологически совместимых эластомерных материалов, удовлетворяющих требованиям Управления по надзору за продуктами и лекарствами США, предъявляемым к имплантируемым устройствам. Модуль 10 датчика давления прикреплен к шунту 60 с помощью обжимающей муфты 74, предпочтительно выполненной из того же материала, что и шунт 60. Соответственно, модуль 10 датчика давления остается неподвижным на месте относительно шунта 60, независимо от любых движений шунта 60. Как будет описано ниже, это является важным признаком имплантируемой системы шунта, позволяющим удерживать окно 18 модуля датчика давления строго и постоянно совмещенным с соответствующим отверстием 76 в шунте 60.
Более конкретно и со ссылками на конфигурацию, показанную на фиг. 14, которая относится к датчикам 68 и 70 давления, для отслеживания давления СМЖ в полости 78, в шунте 60 выполнено отверстие 76, и модуль 10 датчика давления расположен так, что окно 18 постоянно совмещено с отверстием 76, чтобы обеспечить сообщение по текучей среде между шунтом 60 и модулем 10 датчика давления. Соответственно, будет осуществляться непосредственное постоянное и надежное отслеживание давления СМЖ в нужном месте и передаваться на внешнее устройство отслеживания. На фиг. 15А показана конфигурация с тремя датчиками давления, в которой подкожная катушка 80 соединена с датчиком 64 давления в конфигурации, полностью соответствующей показанной на фиг. 6 и описанной выше. Как уже отмечалось, датчики 68 и 70 не связаны с соответствующими подкожными катушками, поскольку такая конфигурация предусматривает расположение датчиков 68, 70 давления достаточно близко к скальпу пациента, чтобы между внешней катушкой 42 и такими датчиками можно было установить удовлетворительный прямой канал связи без необходимости использования подкожных катушек.
На фиг. 15В показана конфигурация, в которой датчики 64, 68 и 70 содержат подкожные катушки 80, 82 и 84, соответственно. Каждая из подкожных катушек 80, 82, 84 связана с соответствующей внешней катушкой (не показана) и контроллером 44 способом, полностью совместимым с конфигурацией, показанной и описанной для варианта осуществления на фиг. 6, и который применим для каждого из трех датчиков давления 64, 68 и 70. Вариант осуществления по фиг. 15В предусматривает, что благодаря размещению датчиков 68 и 70 давления канал связи между соответствующими датчиками давления и внешней катушкой 42 будет создан лучше, если использовать соответствующие подкожные катушки 82 и 84. В терминах выбора конструкции внешние катушки, связанные с датчиками 64, 68, 70 давления, можно соединять с отдельным соответствующим контроллером или контроллером сигналов, что вполне по силам специалистам. Аналогично, для связи со всеми тремя подкожными катушками 80, 82, 84 можно использовать единственную внешнюю катушку 42 или, альтернативно, могут быть использованы три внешних катушки, каждая одна из катушек используется с соответственной подкожной катушкой, что находится в пределах возможностей специалиста в данной области техники.
Ссылаясь на фиг. 15С, показан вариант осуществления, в котором датчики 64, 68 и 70 давления используют соответствующие наружные катушки 81, 83 и 85, соответственно, которые связаны с подкожными катушками 80, 82 и 84, соответственно. В таких случаях работа варианта осуществления по фиг. 15С полностью соответствует конфигурации, показанной и описанной для варианта осуществления на фиг. 6, и которая применима к каждому из трех датчиков 64, 68, 70 давления. Необязательно, с внешним контроллером 44 можно беспроводными средствами связать удаленный контроллер (не показан) и обеспечить возможность отслеживания и управления имплантируемой системой шунта из положения, удаленного от контроллера 44.
Ссылаясь на фиг. 17, показан вид в перспективе полуразреза модуля 10 датчика давления, который выполняет функцию датчика 64 давления, как показано по меньшей мере на фиг. 12 и 15А-15С. Расположенный коаксиально внутри шунта 60 на наконечнике 66 желудочкового катетера 61 модуль 10 датчика давления измеряет давление жидкости на наконечнике 66 через окно 18, которое совмещено с отверстием 76 в шунте 60. Наконечник 66 уплотнен и модуль 10 датчика давления достаточно мал и встроен в шунт 60 так, чтобы во время введения шунта 60 он не смещал ткань мозга больше, чем это делает шунт, не содержащий модуля 10 датчика давления. Как показано на фиг. 17, полость 78 не доходит до модуля 10 датчика давления и СМЖ входит в шунт 60 через отверстия 65. Соответственно, за исключением окна 18 модуль 10 датчика давления полностью изолирован от СМЖ и содержимого шунта 60. Более того, конфигурация по фиг. 17 позволяет измерять давление жидкости в мозгу снаружи от желудочкового катетера 61, не блокируя поток жидкости в полости 78. В случае если отверстия 65 окажутся заблокированными тканью или остатками органических веществ, СМЖ перестанет затекать в полость 78 и модуль 10 датчика давления измерит более высокое давление, чем датчик 68 давления выше по потоку.
Кроме того, наружная катушка 81, которая функционирует с учетом размещения и работы как наружная катушка 32 показанная на фиг. 6, прижата к модулю 10 датчика давления и встроена в часть желудочкового катетера 61 шунта 60. Выводы 34 можно прикрепить к внутренней поверхности полости 78 или к внешней поверхности желудочкового катетера 61 или встроить в шунт для обеспечения гладкого профиля без выступов. Наружная катушка 81 электрически соединена с подкожной катушкой 80, а катушка 80 соединена электромагнитной связью с внешней катушкой 42, как показано на фиг. 15С. Как было описано выше, контроллер 44 выполнен с возможностью подавать питание на модуль 10 датчика давления и принимать данные, такие как показания датчика давления от модуля 10 датчика давления.
Хотя выше были описаны различные варианты осуществления системы, изобретение не ограничивается этими вариантами осуществления, а скорее охватывает все модификации, альтернативы и эквиваленты, подпадающие под объем и сущность изобретения. Поскольку, не выходя из объема и сущности изобретения, можно выполнить много различных вариантов осуществления, изобретение заключено в приложенной формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА ЛИКВОРА ПО ШУНТИРУЮЩЕЙ СИСТЕМЕ С ПОСЛЕДУЮЩИМ РАСЧЕТОМ ВНУТРИЧЕРЕПНОГО ДАВЛЕНИЯ | 2009 |
|
RU2426493C1 |
| СИСТЕМА И СПОСОБ СТЕРИЛИЗАЦИИ ИМПЛАНТИРУЕМОГО МЕДИЦИНСКОГО УСТРОЙСТВА | 2009 |
|
RU2497483C2 |
| ИМПЛАНТИРУЕМЫЙ ШУНТ ДЛЯ ЛЕЧЕНИЯ ГИДРОЦЕФАЛИИ | 2000 |
|
RU2219970C2 |
| УСТРОЙСТВО ДЛЯ НЕИНВАЗИВНОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ В РЕГУЛИРУЕМОМ СУЖАЮЩЕМ УСТРОЙСТВЕ | 2006 |
|
RU2430687C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОРОТНОГО И/ИЛИ ПЕЧЕНОЧНОГО ДАВЛЕНИЯ И СИСТЕМА ДЛЯ ОТСЛЕЖИВАНИЯ ПОРТАЛЬНОЙ ГИПЕРТЕНЗИИ | 2012 |
|
RU2627154C2 |
| Регулируемый имплантируемый дроссель | 2021 |
|
RU2820002C1 |
| Узел иглы, включающий выровненный магнитный элемент | 2013 |
|
RU2669621C2 |
| Устройство для длительного инвазивного дистанционного контроля состояния и критических изменений сердечно-сосудистой системы у пациентов с коморбидностью | 2015 |
|
RU2613086C2 |
| ОТСЛЕЖИВАНИЕ ИМПЛАНТИРУЕМОГО УСТРОЙСТВА, ПИТАЕМОГО ЭНЕРГИЕЙ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ ВОЛН | 2021 |
|
RU2838400C1 |
| УСТРОЙСТВО ДЛЯ ВЗАИМОДЕЙСТВИЯ С КОЖЕЙ ДЛЯ УСТРОЙСТВА СТИМУЛЯЦИИ СЕРДЕЧНОЙ ДЕЯТЕЛЬНОСТИ | 2014 |
|
RU2679963C2 |





Изобретение относится к медицинской технике, а именно к системам для датчика давления. Имплантируемая система содержит модуль датчика давления, выполненный с возможностью размещения в заданном месте, пластину основания, имеющую первую и вторую обращенные в противоположные направления стороны, при этом пластина основания имеет порт ввода давления, продолжающийся между упомянутыми первой и второй сторонами, модуль датчика давления установлен на первой стороне пластины основания, модуль датчика давления включает в себя датчик давления, расположенный на порте, электронную схему, смонтированную на первой стороне пластины основания, и электрически соединенную с модулем датчика давления, и выполненную с возможностью обрабатывать сигнал давления, внутреннюю катушку, смонтированную на первой стороне пластины основания и электрически соединенную с электронной схемой, при этом внутренняя катушка выполнена с возможностью принимать сигнал питания для подачи электроэнергии на электронную схему и передавать сигнал данных, и крышку, прикрепленную на первой стороне пластины для обеспечения герметичности. Двухступенчатая система передачи данных и питания для использования с имплантируемым датчиком давления содержит модуль датчика давления, включающий в себя внутреннюю катушку, соединенную с электронной схемой, связанной с модулем датчика, имплантируемую наружную катушку, имеющую первую катушку, расположенную снаружи модуля датчика, и вторую катушку, выполненную с возможностью подкожного размещения рядом с черепом пациента, при этом упомянутая наружная катушка обеспечивает передачу данных и питания первой ступени между внутренней катушкой и наружной катушкой, и внешнюю катушку, соединенную с внешним контроллером, при этом внешняя катушка выполнена с возможностью размещения снаружи от пациента и обеспечения электромагнитной связи со второй катушкой, контроллер выполнен с возможностью обеспечения сигналов питания и данных для модуля датчика давления, внешняя катушка обеспечивает передачу питания и данных второй ступени между внешней катушкой и наружной катушкой. Использование группы изобретений обеспечивает минимизацию нарушений тканевой среды. 2 н. и 13 з.п. ф-лы, 19 ил.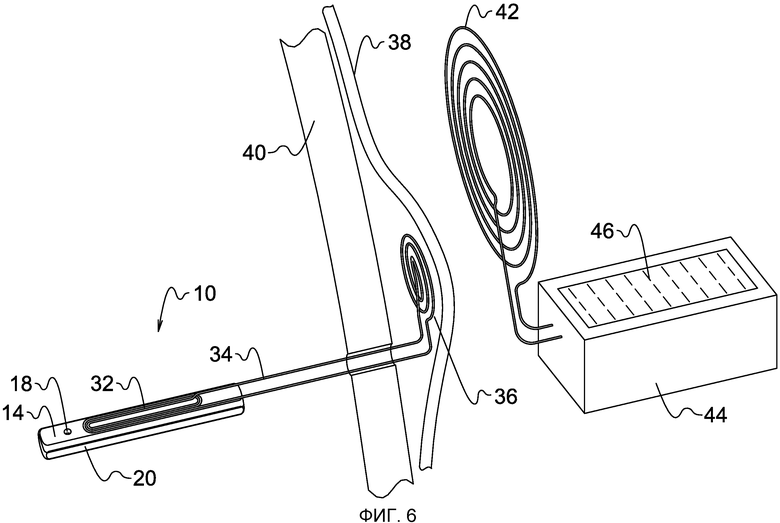
1. Имплантируемая система датчика давления, содержащая:
модуль датчика давления, выполненный с возможностью размещения в заданном месте имплантации, в котором следует измерять давление,
пластину основания, имеющую первую и вторую обращенные в противоположные направления стороны, при этом упомянутая пластина основания имеет порт ввода давления, продолжающийся между упомянутыми первой и второй сторонами, упомянутый модуль датчика давления установлен на первой стороне пластины основания, модуль датчика давления включает в себя датчик давления, расположенный на порте ввода и выполненный с возможностью измерять давление, существующее в порте ввода, и обеспечивать тем самым сигнал давления, соответствующий такому измеренному давлению,
электронную схему, смонтированную на первой стороне пластины основания, и электрически соединенную с модулем датчика давления, и выполненную с возможностью обрабатывать сигнал давления,
внутреннюю катушку, смонтированную на первой стороне пластины основания и электрически соединенную с электронной схемой, при этом упомянутая внутренняя катушка выполнена с возможностью принимать сигнал питания для подачи электроэнергии на по меньшей мере электронную схему и передавать сигнал данных, соответствующий сигналу давления, и
крышку, прикрепленную на первой стороне пластины основания так, чтобы обеспечить герметично уплотненный корпус для упомянутого модуля датчика, электронной схемы и внутренней катушки.
2. Система датчика давления по п.1, дополнительно содержащая наружную катушку, имеющую первую и вторую катушки, при этом упомянутая первая катушка выполнена с возможностью размещения на второй стороне пластины основания рядом с внутренней катушкой для обеспечения электромагнитной связи между ними, упомянутая вторая катушка расположена удаленно от первой катушки и выполнена с возможностью установки под кожу рядом с черепом пациента и выполнена с возможностью приема сигналов данных и питания от внешней катушки, расположенной рядом со второй катушкой.
3. Система датчика давления по п.2, дополнительно содержащая блок внешнего контроллера, соединенный с внешней катушкой, при этом упомянутая внешняя катушка находится в электромагнитной связи с наружной катушкой, упомянутый блок внешнего контроллера выполнен с возможностью по меньшей мере принимать сигналы данных, выдаваемые модулем датчика давления, соответствующие измеренному давлению в месте имплантации, и выдавать сигналы питания для питания электронной схемы.
4. Система датчика давления по п.1, в которой пластина основания содержит не проводящий электричество материал.
5. Система датчика давления по п.4, в которой не проводящий электричество материал содержит стекло.
6. Система датчика давления по п.5, в которой стекло выбрано из группы, содержащей стекло Pyrex, Borofloat и SD-2.
7. Система датчика давления по п.1, в которой крышка содержит стекло или кремний, адаптированный для анодной сварки с пластиной основания.
8. Система датчика давления по п.1, в которой датчик давления содержит элемент считывания давления, содержащий мембрану, находящуюся в сообщении по текучей среде с портом ввода.
9. Система датчика давления по п.8, в которой мембрана выбрана из группы, содержащей емкостной и пьезоэлектрический материал.
10. Система датчика давления по п.9, в которой мембрана покрыта силиконовым гелем для изоляции мембраны от контакта с биологическими жидкостями.
11. Система датчика давления по п.1, в которой сигналы данных передаются с использованием РЧ передач.
12. Система датчика давления по п.1, в которой упомянутая внутренняя катушка намотана на ферритовый сердечник.
13. Система датчика давления по п.3, в которой внешний контроллер содержит датчик атмосферного давления, причем внешний контроллер выполнен с возможностью измерять разницу между атмосферным давлением и давлением, измеренным модулем датчика давления.
14. Система датчика давления по п.13, в которой внешний контроллер содержит дисплей для отображения давления, измеренного модулем датчика давления, и разницы между атмосферным давлением и давлением, измеренным модулем датчика давления.
15. Двухступенчатая система передачи данных и питания для использования с имплантируемым датчиком давления, содержащая:
модуль датчика давления, выполненный с возможностью размещения в заданном месте имплантации, в котором следует измерять давление, при этом модуль датчика давления включает в себя внутреннюю катушку, соединенную с электронной схемой, связанной с упомянутым модулем датчика,
имплантируемую наружную катушку, имеющую первую катушку, расположенную снаружи модуля датчика давления рядом с внутренней катушкой для обеспечения электромагнитной связи с ней, и вторую катушку, выполненную с возможностью подкожного размещения рядом с черепом пациента, при этом упомянутая наружная катушка обеспечивает передачу данных и питания первой ступени между упомянутой внутренней катушкой и наружной катушкой, и
внешнюю катушку, соединенную с внешним контроллером, при этом упомянутая внешняя катушка выполнена с возможностью размещения снаружи от пациента и обеспечения электромагнитной связи со второй катушкой, упомянутый контроллер выполнен с возможностью обеспечения сигналов питания и данных для упомянутого модуля датчика давления, упомянутая внешняя катушка обеспечивает передачу питания и данных второй ступени между упомянутой внешней катушкой и упомянутой наружной катушкой.
| US 2002052563 A1, 02.05.2002 | |||
| DE 102007008642 B3, 14.08.2008 | |||
| US 2010022896 A1, 28.01.2010 | |||
| Устройство для измерения внутричерепного давления | 1986 |
|
SU1405808A1 |

