Данное изобретение относится к системе динамического контроля качения одного или нескольких элементов качения для направляющей системы, действующей за счет качения вдоль по меньшей мере одного рельса, в частности расположенного на грунте, для дорожного транспортного средства, в частности транспортного средства общественного пользования.
В частности, эта система динамического контроля сочетает создание и распознавание колебательного состояния и индикацию изменения высоты элемента (элементов) качения направляющей системы относительно направляющего рельса (рельсов) с целью предоставления информации касательно опасности и статуса схода с рельса, а также износа этих элементов качения или их шин.
Такой контроль возможен на основе измерения или распознавания колебательного состояния и индуктивных измерений, обеспечиваемых датчиками, установленными на направляющей системе для оповещения о любых отказах направляющей системы, с целью предотвращения аварий, обусловленных сходом с рельса, и, в любом случае, для сведения к минимуму последствий схода с рельса. Целью является предупреждение о возможности схода с рельса, а именно о начале отказа направляющей системы, для принятия мер безопасности.
Направление транспортного средства направляющей системой вдоль по меньшей мере одного рельса - например расположенного на грунте - обеспечивается только в том случае, если средства качения по этому направляющему рельсу и вдоль него постоянно соприкасаются с ним.
Настоящее изобретение относится, в частности, без ограничения к случаю, когда направление обеспечивается двумя наклонными катками, которые катятся по наклонным участкам направляющего рельса, например, как показано на фигурах. У каждого такого рельса может иметься подошва.
Функционирование такой направляющей системы является нормальным и безопасным, если катки охватывают рельс. Обычно часть катка, соприкасающаяся с рельсом, выполняется из сравнительно эластичного материала, например каучука или полиуретана. Но в любом случае эта часть катка отличается по жесткости от реборды независимо от того, выполнены эти элементы из одного материала или из разных материалов.
Катки с ребордами являются одним из предпочтительных вариантов осуществления настоящего изобретения, поскольку оно относится ко всем типам направляющих катков и направляющих колес. Можно легко представить применение настоящего изобретения для направляющих устройств, содержащих фиксированный относительно вращения кожух, соединенный с креплением катка (катков) и выступающий относительно пути качения этих катков.
Если направляющий каток (катки) касаются при качении своего пути качения своей ребордой (ребордами)/кожухом (кожухами), транспортное средство, оборудованное данной направляющей системой, продолжает движение по своей траектории, однако возникает опасность схода с рельса. В этом случае часть направляющей системы, соприкасающаяся с рельсом, изготовлена из стали. Таким образом, имеет место контакт металла с металлом. Если катки сходят с рельса, то, учитывая, что реборды или кожух выступают - т.е. выступают относительно них, - последние входят в соприкосновение с поверхностью дорожного полотна. В этом случае характеристика вибрации также различна.
Соответственно, можно легко отличить характеристику вибрации крепления катков, измеренную при нормальном качении/направления, от той же характеристики во всех остальных случаях.
Тем не менее существует множество причин отклонения этих средств качения, приводящего к сходу с направляющего рельса. Риск схода с рельса может быть очень высоким - особенно в городской местности, где в силу разнообразия маршрутов и режимов движения система становится уязвима перед различными видами загрязнений и выбросов в дополнение к мусору и посторонним объектам, которые могут перемещаться под действием неблагоприятных погодных условий/в силу непредвиденных обстоятельств, а также экстремальных метеорологических явлений.
Предложено несколько технических решений, призванных предотвратить сход с рельса и позволяющих обеспечить безопасную работу направляющей системы до определенного предела. Однако ни одна из пассивных систем защиты от схода с рельсов не способна полностью удовлетворить жесткие требования, предъявляемые к безопасности городского пассажирского транспорта.
При сходе направляющей системы с рельса, например из-за локального нарушения целостности направляющего рельса, наличия препятствия или постороннего объекта на направляющем рельсе, обледенения или по каким-либо иным причинам, может произойти аварийный подъем направляющей системы. Поскольку движение транспортного средства больше не направляется рельсом, единственно возможным решением для водителя будет остановиться и дождаться, пока транспортное средство не будет снова правильно установлено на рельс с посторонней помощью.
Существует потребность в системе раннего обнаружения и обнаружения в режиме реального времени опасности схода с рельса и факта схода с рельса.
Настоящее изобретение представляет собой подходящее решение, позволяющее удовлетворить эту потребность, а также выявлять чрезмерный износ или повреждение шин направляющих катков.
Предложенная согласно настоящему изобретению система динамического контроля качения по направляющему рельсу и контакта с эти рельсом обеспечивает в режиме реального времени постоянный контроль качения направляющих катков или направляющих колес по направляющему рельсу с целью подачи тревожного сигнала в случае малейшего отклонения или изменения высоты или траектории катка (катков) и направляющей системы, частью которой они являются, в целом.
Если эта система динамического контроля качения и контакта с направляющим рельсом зарегистрирует отделение направляющей системы от рельса, с которым она должна постоянно соприкасаться, то есть изменение характеристики вибрации, а также увеличение расстояния до рельса по вертикали, будет подан предупредительный сигнал системе наблюдения и безопасности и водителю транспортного средства, который сможет принять надлежащие меры, предусмотренные инструкцией/правилами техники безопасности и соответствующие серьезности происшествия. Тот же предупредительный сигнал может также привести в действие системы безопасности, которые могут, например, вызвать остановку транспортного средства или срабатывание активной системы защиты от схода с рельса или возврата на рельс.
Система согласно настоящему изобретению способна также обнаруживать износ или повреждение шин катков, выполняющих роль средств качения направляющей системы, на рельсе. Таким образом, обеспечивается контроль с точки зрения безопасности и контроль для нужд обслуживания с целью замены этих шин.
Таким образом, данное изобретение преследует две цели. Во-первых, оно обеспечивает постоянный контроль удовлетворительного функционирования направляющей системы и заблаговременное оповещение об отказе направляющей системы. Во-вторых, оно позволяет проводить профилактическое обслуживание благодаря регистрации нормального или чрезмерного износа шин катков.
Соответственно, данное изобретение относится к системе динамического контроля контакта между рельсом и элементами качения направляющей системы дорожного транспортного средства, действующей за счет движения вдоль по меньшей мере одного направляющего рельса, в частности расположенного на грунте.
Такая система способна функционировать во всех штатных ситуациях движения или остановки транспортного средства, т.е. при движении в обоих направлениях, во всем диапазоне допустимых скоростей, при прохождении стрелок, переездов и уравнительных стыков, крутых поворотов, во время торможения и т.п. Кроме того, учитывая, что невыявление отказа направляющей системы чревато особо серьезными последствиями, данная система должна быть максимально надежной.
Предложенная согласно настоящему изобретению система динамического контроля функционирования направляющей системы и контакта с рельсом содержит по меньшей мере один датчик, который способен генерировать вибросигнал и связан со средствами распознавания режима вибрации, соответствующего критическому состоянию направляющей системы или износу катка (катков) или его шины (шин), и датчик положения, сигнализирующий о подъеме катка (катков) направляющей системы относительно рельса. Комбинированный анализ сигналов от этих двух датчиков позволяет сделать выводы касательно схода с рельса или отказа направляющей системы. Получение тревожного сигнала только от вибрационного датчика означает либо неисправность датчика, либо дефект шины или шин. Получение тревожного сигнала только от датчика положения означает неисправность этого датчика. Одновременное получение обоих вышеуказанных тревожных сигналов означает сход с рельса.
Предпочтительно, генерирующая вибросигнал система обнаружения содержит по меньшей мере один акселерометр, жестко соединенный с механическим приспособлением, обеспечивающим крепление каждой пары направляющих катков. Сигнал, поступающий от акселерометра или от каждого из акселерометров, подвергается обработке и частотному анализу, например, с целью получения информации о рабочем состоянии направляющей системы.
Датчик положения предпочтительно является индуктивным. Он содержит индуктивный датчик, контролирующий расстояние между фиксированной точкой отсчета на направляющей системе, например нижней осью направляющих катков, и верхней поверхностью направляющего рельса. При нормальном функционировании направляющей системы это расстояние практически не меняется. Со временем, по мере нормального износа шин катков, оно может немного уменьшиться. Кроме того, эта величина зависит от механической конструкции направляющей системы, транспортного средства и инфраструктуры.
Выходные сигналы датчиков ускорения и индуктивного датчика положения легкодоступны и подаются на соединители с целью ускорения и упрощения технического обслуживания.
Эти датчики обладают повышенной устойчивостью к изменениям температуры, износу, ударам и вибрации, что обеспечивает надежность работы системы динамического контроля согласно настоящему изобретению на протяжении длительного времени.
Кроме того, сочетание двух дублирующих друг друга технологий, у которых нет общего режима отказа, позволяет значительно снизить риск полного отказа системы динамического контроля согласно настоящему изобретению.
Предложенная система динамического контроля контакта с рельсом обладает рядом других преимуществ, включая, в частности, следующие:
• система способна функционировать несмотря на различия между шинами правого и левого катков любого заданного направляющего узла или переднего и заднего направляющих узлов;
• система функционирует независимо от направления и скорости движения;
• система не требует регулировки или калибровки поездной секции и, соответственно, готова к работе сразу после запуска транспортного средства;
• на работе системы не сказываются нормальные факторы износа, как то: прохождение стрелок, переездов, компенсационных систем и систем контроля постановки на рельс, качение с упором на реборду направляющего катка на крутых поворотах, экстренное торможение и т.п.; и
• система функционирует одинаково эффективно как для крайних, так и для промежуточных осей транспортного средства.
Наконец, система динамического контроля качения и контакта с рельсом позволяет получать не только данные, имеющие отношение к сходу с рельса, но и другую информацию. Например, она способна подавать сигналы, форма и частота которых позволяют определить степень износа элементов направляющей системы или их шин или определить их отказ.
Другие отличительные черты и преимущества настоящего изобретения станут ясны из приведенного ниже подробного описания, которое ссылается на прилагаемые графические материалы, где:
• фиг.1 представляет собой вид сверху оси транспортного средства, направляемого направляющей системой с двумя парами катков, каждая из которых содержит систему динамического контроля контакта;
• Фиг.2 представляет собой укрупненный вид части фиг.1, обведенной кружком;
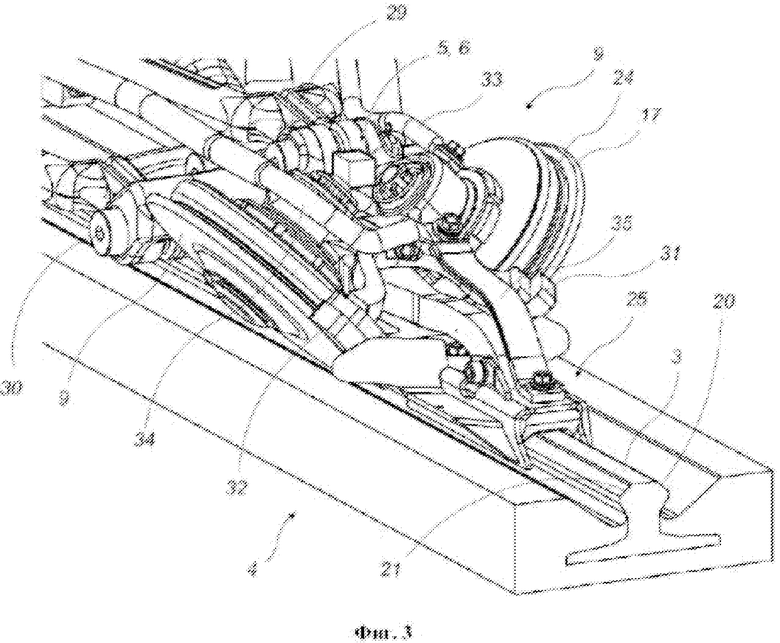
• фиг.3 представляет собой вид в перспективе части, изображенной на фиг.2;
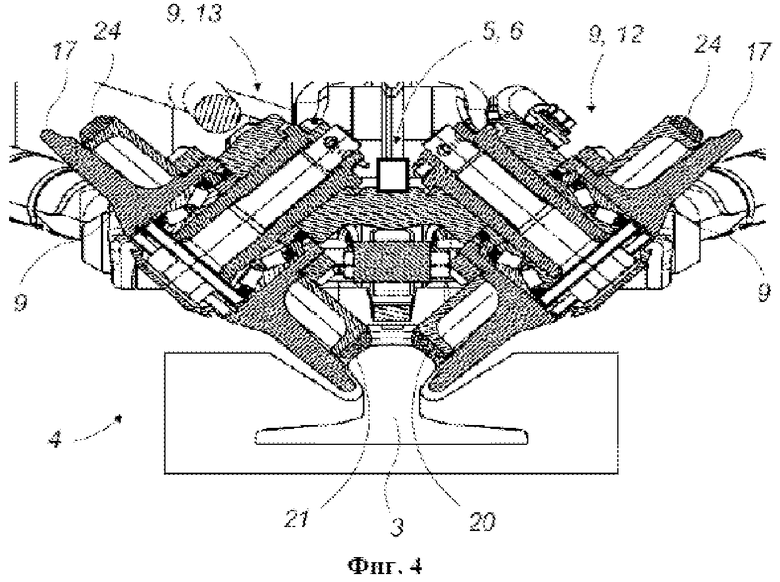
• фиг.4 представляет собой вид направляющей системы в поперечном разрезе, на уровне линии поперечного разреза, показанной на фиг.2;
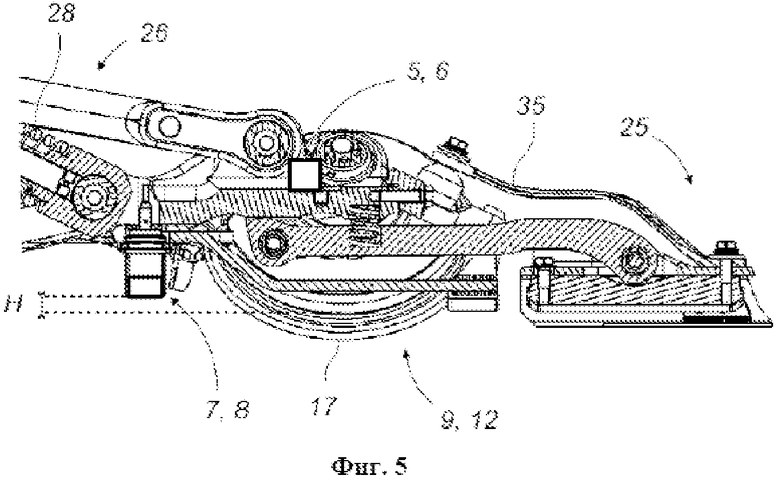
• фиг.5 представляет собой вид в продольном разрезе направляющей системы, на уровне линии продольного разреза, показанного на фиг.2;
• фиг.6 представляет собой блок-схему, на которой отображен состав системы;
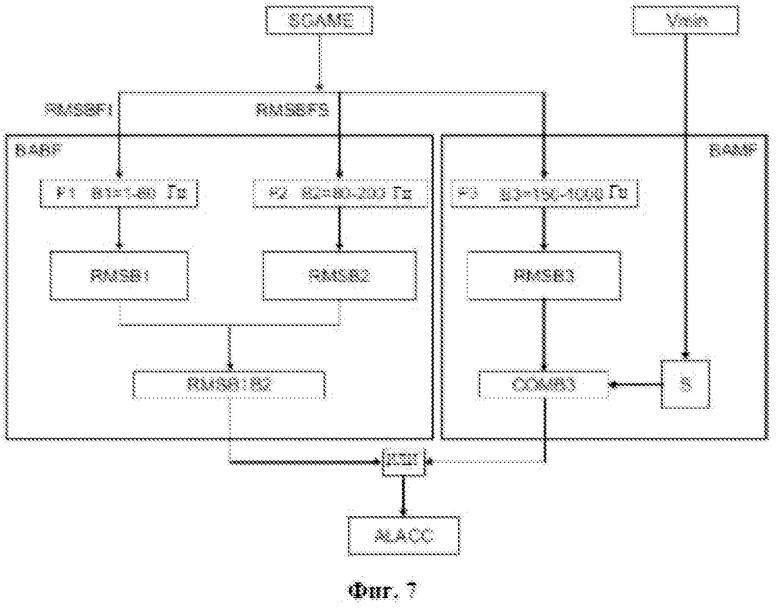
• фиг.7 представляет собой блок-схему одного из вариантов анализа сигнала, полученного от используемых датчиков;
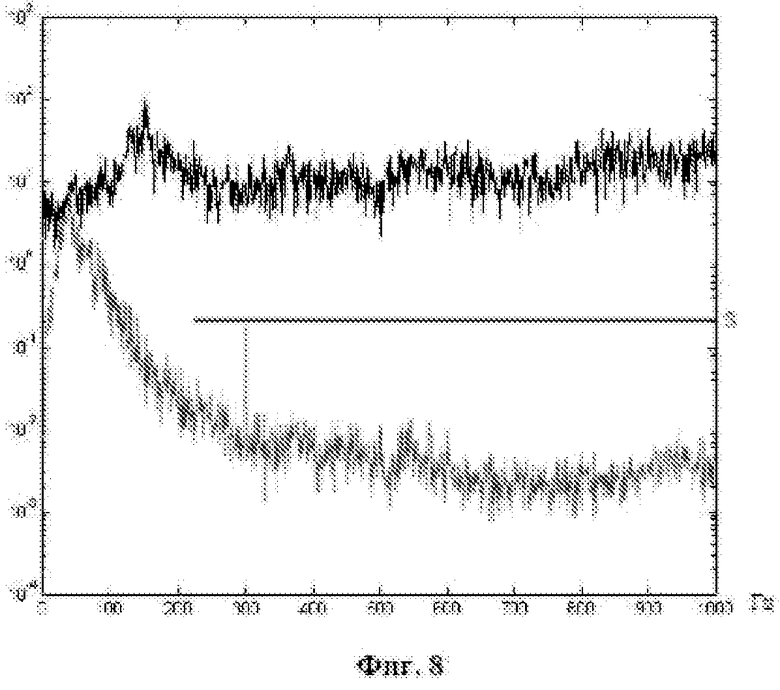
• фиг.8 представляет собой график, где сравниваются два частотных спектра средней мощности на маршруте, генерируемых акселерометром, при этом вверху частотная характеристика в случае отказа направляющей системы, а внизу частотный сигнал при нормальной работе направляющей системы;
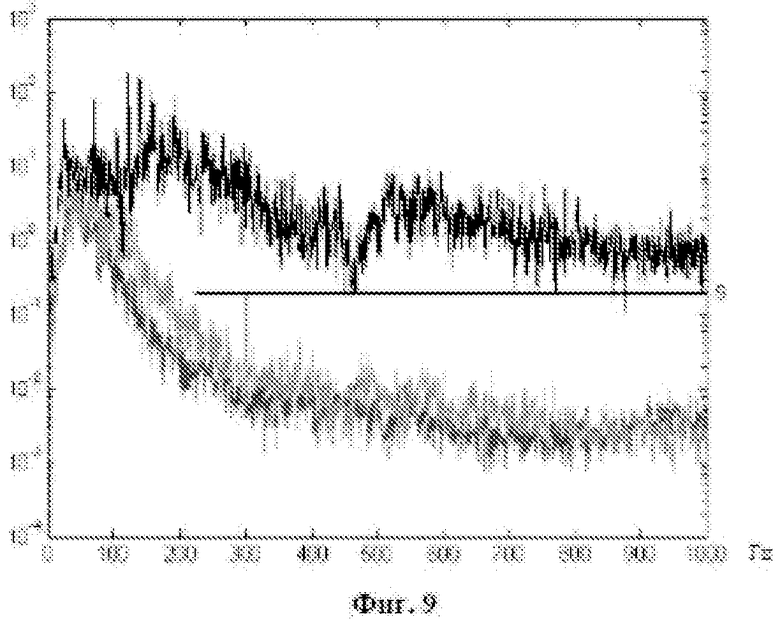
• фиг. 9 представляет собой график, где сравниваются три частотных спектра средней мощности на маршруте, генерируемых акселерометром, которые, сверху вниз, соответствуют катку с износом 100%, катку с износом 50% и новому катку соответственно.
Для простоты ниже используется термин «направляющий каток». Очевидно, под «катком (катками)» следует понимать в широком смысле любой элемент качения, двигающийся по рельсу, включая колеса поезда или трамвая.
Настоящее изобретение отталкивается от общей идеи, согласно которой применяется система (1) динамического контроля на направляющей системе (2) какого-либо транспортного средства, двигающегося вдоль по меньшей мере одного направляющего рельса (3), в частности расположенного на грунте (4), содержащая по меньшей мере один вибрационный датчик (5), например акселерометр (6), и по меньшей мере один датчик (7) положения, например индуктивный датчик (8), которые устанавливаются на эту направляющую систему (2) или крепятся к ней возле по меньшей мере одного катка (9) или по меньшей мере одной пары направляющих катков (9), и сигналы этих датчиков (5), (7) используются для определения отказа или отсутствия отказа направляющей системы, статуса схода с рельса и обычного износа шин направляющих катков (9).
В частности, применяются сигналы, поступающие от каждого вибрационного датчика (5), которые подвергаются частотному анализу, а уровень сигнала от датчика (7) положения сравнивается с эталонным расстоянием, чтобы определить, указывают ли сигналы от вибрационного датчика (датчиков) (5) на повреждение, или износ направляющих катков (9), или на сход с рельса, если два тревожных сигнала, подаваемые системами обнаружения, соответствуют друг другу.
Более подробное описание этих систем и их воплощения приведено ниже со ссылками на различные фигуры.
В качестве иллюстрации здесь описана система (1) динамического контроля согласно настоящему изобретению, установленная на направляющей системе (2), предназначенной для наземного транспортного средства, направляемого вдоль центрального рельса (3), в частности расположенного на грунте (4). Разумеется, система (1) может использоваться не только с этим типом направляющей системы и ее можно приспособить и использовать с любой направляющей системой, в основе которой лежит контакт с по меньшей мере одним направляющим рельсом.
В направляющей системе, описанной в качестве предпочтительного варианта, каждая ось или рама (10) оси направляемого транспортного средства обслуживается направляющей системой (2), содержащей две пары направляющих катков (9), а именно: одну пару (11) ведущих колес (12) и (13), расположенную впереди, относительно направления движения, и одну пару (14) ведомых колес (15) и (16), расположенную сзади, относительно направления движения, что позволяет транспортному средству двигаться в обоих направлениях. Понятно, что если транспортное средство способно двигаться только в одну сторону, оно оснащается только одной направляющей системой, расположенной впереди, относительно направления движения.
Предпочтительно, направляющие катки (9) имеют реборду, например реборду (17), а также эластичную шину (24) или же отличаются от реборды по меньшей мере одной характеристикой механической жесткости, а именно меньшей жесткостью.
Катки можно также использовать без шин. В этом случае каток или катки имеют особую краевую поверхность качения, например с композитной структурой и с различной радиальной жесткостью, например меньшей, чем жесткость реборд или жесткость выступающей части катков, или же близкой к этим показателям и, например к жесткости рельса.
Тот же эффект может быть достигнут с помощью цельнометаллического катка, у которого краевая поверхность качения выполнена из материала, уступающего в жесткости реборде или выступающей части, или у которого ось вращения содержит подшипник или выполнена из более эластичного материала, чем материал основной конструкции.
Ориентация каждой оси или рамы (10) оси обеспечивается рычажным механизмом (18) и (19), на котором крепится пара (11), (14) катков (9), расположенных под наклоном в V-образной конфигурации, нижняя часть которых соприкасается с наклонными боковыми кромками (20) и (21), а также с фаской направляющего рельса (3). Эта пара (11), (14) направляющих катков (9) движется вдоль направляющего рельса (3) качением по боковым кромкам (20) и (21), используя их в качестве пути качения, и обеспечивает ориентацию оси или рамы (10) оси аналогично сцепному рычажному механизму. Все боковые нагрузки на раму (10) оси и транспортное средство - например, возникающие под действием ветра или центробежных сил - передаются на шины (22) и (23). На направляющую систему (2) передаются только усилия, необходимые для обеспечения ориентации рам (10) осей.
Катки (9) и имеющие фаску боковые кромки (20) и (21) направляющего рельса (3) наклонены под углом 45°, что позволяет снизить вертикальную нагрузку на катки (9) и передать усилия на направляющий рельс (3) за счет качения катков (9), а не за счет трения реборд (17) о направляющий рельс(3).
Из соображений комфорта и, в первую очередь, снижения шума, а также во избежание износа рельса катки (9) часто оснащаются шинами, такими как (24), из эластичного материала, которыми они обычно соприкасаются и остаются в контакте с направляющим рельсом (3) и которые обеспечивают щадящий контакт с рельсом. Недостатком этого материала является его постепенный износ при качении, в результате чего возникает необходимость в его замене. Также является понятным, что эта часть может быть также изготовлена из стали, но при условии правильного выбора формы, которая позволит повысить радиальную гибкость и, соответственно, придаст меньшую, по сравнению с ребордой, жесткость.
Также возможно обеспечить различие характеристик вибрации между краевой областью качения и ребордами или выступающей частью крепления колес за счет различных одиночных или повторяющихся локальных выступов или выемок, выступающих гребней или плоских участков или других изменений формы или геометрии, например, по краю реборд.
В особых случаях различие в жесткости может быть противоположным, т.е. показатели жесткости реборды (реборд) или выступающей части могут быть меньше показателей жесткости краевой области качения катков.
Направляющая система (2) также содержит передний скользящий концевой элемент (25), называемый рельсоочистителем, а также опорную конструкцию с укосинами (28) и (27), пружину (28), обеспечивающую постоянное давление относительно рычажного механизма, две поворотных оси (29) и (30) для ее подъема, опорные элементы для катков, такие как, например (31) и (32), и различные электрические соединения, (33) и (32), обеспечивающие возвращение тока питания, подаваемого из транспортного средства, в виде электроэнергии.
Согласно настоящему изобретению, возле каждой пары (11), (14) катков (9) предусмотрен вибрационный датчик (5), передающий сигналы, характеризующие колебательное состояние механического узла, состоящего из двух катков (9), принадлежащих к одной паре (11) или (14), состоящих из (12) и (13), (15) и (16) соответственно, и их крепления, как показано на фиг.2-5.
С точки зрения точности контроля предпочтительным является вариант, при котором вибрационный датчик (5) расположен как можно ближе к паре (11, 14) катков (9).
В нормальном режиме качения каждого из катков (9), когда шина (24) из эластичного материала движется по наклонному пути качения, (20) и (21), этого катка на направляющем рельсе (3), частотная характеристика или спектр сигнала вибрационного датчика (5) имеет определенную форму. Если каток (9) или его часть катится по или трется о рельс (3), контакт металла с металлом изменит характер и характеристику вибрации, например в том, что касается частот вибрационного датчика (5), а именно изменится разбивка по частотам, форма и содержание сигнала. Таким образом, путем сравнения возможно выявлять проблемы любого рода, связанные с по меньшей мере одним из катков (9) - например износ его шины (24) из эластичного материала или отказ направляющей системы.
Во избежание сомнений в отношении характера проблемы, выявленной с помощью вибрационного датчика (5), в частности с целью отличить износ или повреждение шины (24) от отказа направляющей системы, используется датчик (7) положения, представляющий собой, например, индуктивный датчик (8) положения, который обеспечивает постоянно постоянную индикацию своего положения, в частности по вертикали, относительно поверхности отсчета.
Этот датчик (7) положения устанавливается на направляющей системе (2) в месте, позволяющем ему сравнительно без помех обеспечивать индикацию расстояния от поверхности отсчета, в частности расстояния относительно верхней поверхности направляющего рельса (3), которое далее называется параметр H и указано на фиг.5.
В случае, если анализ сигнала вибрационного датчика (5) выявил проблему, а значение параметра H превышает его нормальное значение, т.е. значение, соответствующее нормальной работе направляющей системы (2), то имеет место отказ направляющей системы, а именно нарушено нормальное качение направляющих катков (9) шинами по направляющему рельсу (3), или же отказ датчика. Если значение H, измеренное датчиком положения, остается почти неизменным и близко к нормальному значению этого параметра, а также получен тревожный сигнал вибрационного датчика, можно предположить износ или повреждение шин катков. В любом случае, каждый раз, когда одновременно получены тревожный сигнал вибрационного датчика и тревожный сигнал датчика положения, можно сделать вывод об отказе направляющей системы.
Предпочтительно, вибрационный датчик (5) и датчик (7) положения устанавливаются возле кабелей (33), (34) и (35), предназначенных для возращения тока, подаваемого из транспортного средства.
Во избежание электромагнитных помех передаваемому сигналу вибрационный датчик (5) и датчик (7) положения соединены с блоком обработки сигнала экранированными проводами.
Датчики, используемые в качестве вибрационного датчика (5) и датчика (7) положения, зачастую представляют собой передающие датчики, то есть они передают сигнал, соответствующий тем значениям параметров, к которым они чувствительны. Эти датчики могут также представлять собой пассивные элементы с изменяющимися электрическими характеристиками. Разумеется, датчик такого типа устанавливается в соответствующей цепи обнаружения.
Как показано на фиг.6, блок обработки и анализа сигналов, передаваемых вибрационным датчиком (5) и датчиком (7) положения, содержит параллельно акселерометрический канал VACC, содержащий вибрационный модуль обработки MODVI, и индуктивный канал VINDU с индуктивным модулем обработки MODIN.
Эти модули обработки соединены с передним и задним вибрационными датчиками (5) AccAV и AccAR в одном случае и с передним и задним датчиками (7) положения CiAV и CiAR в другом случае. Они оснащены различными выходами, при этом каждый оснащен выходом EtCAP, обеспечивающим передачу информации о состоянии датчиков, и основным выходом, который соединен с многоканальным блоком сигнализации BALAM.
Отображенный на фиг.6 вибрационный модуль обработки MODVI принимает информацию о скорости VI и сигналы от переднего и заднего вибрационных датчиков (5) AccAV и AccAR. Блок-схема этого модуля представлена на фиг. 7.
Он состоит из двух блоков обработки и анализа, отвечающих за разные частотные диапазоны вибрации: блока низких частот BABF и расположенного рядом блока средних частот BAMF.
В эти блоки обработки BABF и BAMF поступает измеряемый сигнал SGAME от вибрационного датчика (датчиков) (5).
Первый блок BABF имеет два канала: канал среднего уровня для самых низких частот RMSBFI и второй канал среднего уровня для верхних низких частот RMSBFS. В начале каждого из этих каналов предусмотрен соответственно один низкочастотный фильтр F1 в диапазоне B1 1-80 Гц и один полосовой фильтр F2 в диапазоне B2 80-200 Гц, за которыми установлены модуль измерения уровня эффективного напряжения для самых низких частот B1, модуль RMSB1, и для верхних низких частот B2, модуль RMSB2, соответственно.
Эти два уровня сравниваются в модуле дифференциации RMSB1B2.
Если разница между ними превышает порог, соответствующий заданному уровню, например 6 дБ, срабатывает акселерометрическая сигнализация ALACC.
В соседний блок анализа средних частот BAMF также подается измеряемый сигнал SGAME вибрационного датчика (датчиков) (5). В этом блоке предусмотрен канал, содержащий полосовой фильтр F3 верхних средних частот в диапазоне B3 150-1000 Гц, за которым установлен модуль измерения уровня эффективного напряжения для верхних средних частот B3, модуль RMSB3. Этот уровень сравнивается с порогом S в компараторе COMB3.
Этот порог S отличается в зависимости от того, больше или меньше скорость транспортного средства значения минимальной скорости Vmin, которая может быть равна, например, 15 км/ч. С помощью кодирующего устройства порогу S присваиваются различные значения в зависимости от того, больше или меньше скорость транспортного средства значения Vmin.
Например:
Компаратор COMB3 передает тревожный сигнал, если эффективное напряжение сигнала B3 больше величины порога S.
Возможность подачи двух тревожных сигналов от двух блоков обработки по каналу акселерометрической сигнализации ALACC обеспечивает логический блок «ИЛИ».
Из общей диаграммы, приведенной на фиг.8, видно, что повышение величины параметра H сверх заданной величины, соответствующей поверхности отсчета, в сочетании с превышением уровня действующего порога для измеряемых полос частот сигнала от вибрационного датчика (датчиков) (5) позволяют сделать вывод о сходе с рельса.
На фиг.8 и 9 приведен для сравнения пример частотных характеристик на уровне вибрационного датчика (5), представляющего собой акселерометр (6). В каждом случае сравнение производится с нормальным режимом работы направляющей системы, характеристика которого приведена в нижней части каждой из фигур.
На фиг.8 при сравнении характеристики нормального режима работы направляющей системы с характеристикой в режиме отказа направляющей системы, которая находится в верхней части диаграммы, видно, что средний уровень характеристики выше в случае отказа направляющей системы, при этом на низких частотах наблюдается пик. Таким образом можно легко обнаружить отказ направляющей системы.
На фиг.9 видно различие между характеристиками спектров нового катка и катка, который изношен или имеет изношенную шину или обод. В нормальном режиме работы направляющей системы спектр колеса с 50% износом мало отличается от спектра нового колеса. Соответственно, эти спектры существенно отличаются только при сильно выраженном износе. Спектр катка (катков) со 100% износом расположен в верхней части диаграммы и отличается формой. В то же время при промежуточном износе спектр мало отличается от спектра нового катка в нормальном режиме работы направляющей системы, поэтому во избежание сомнений необходимо сверяться с показаниями датчика положения, предусмотренного настоящим изобретением. Эти дополнительные показания датчика положения позволяют сделать вывод или об отказе направляющей системы, или об износе шины (шин), или о неисправности датчика.
В ходе эксплуатации возможна подача различных тревожных сигналов в зависимости от того, обнаружила ли система (1) динамического контроля, предложенная согласно настоящему изобретению, нарушение контакта с рельсом (3) и связано ли это нарушение с парой (11) ведущих катков (12) и (13) и/или парой (14) ведомых катков (15) и (16), что позволяет соответствующим образом адаптировать меры, принимаемые с целью предотвратить сход с рельса. К мерам, которые могут быть предприняты, можно отнести, например, снижение скорости транспортного средства и экстренную остановку транспортного средства, или приведение в действие активной системы защиты от схода с рельса или системы возврата на рельс, или любые другие подходящие действия.
Для этого в системе динамического контроля согласно настоящему изобретению предпочтительно используется аналоговый интерфейс обработки, позволяющий обеспечить эффективное обнаружение отказов направляющей системы без использования программируемых логических схем.
Очевидно, что данное изобретение не ограничивается описанным выше и проиллюстрированным различными фигурами предпочтительным вариантом осуществления; обладающий необходимыми знаниями специалист может внести множество изменений и разработать другие варианты, не выходя за рамки объема настоящего изобретения.


Система (1) динамического контроля качения по меньшей мере по одному направляющему рельсу для направляющей системы (2) транспортного средства, направляемого вдоль по меньшей мере одного направляющего рельса, состоит из по меньшей мере одного катка (9) или по меньшей мере одной пары (11, 14) направляющих катков (9), качение которых происходит вдоль этого направляющего рельса. Система (1) также содержит вибрационный датчик (5), расположенный возле по меньшей мере одного катка (9) или по меньшей мере одной пары (11, 14) направляющих катков (9), и датчик (7) положения. Сигналы, передаваемые этими датчиками (5, 7) или цепями, в которых они установлены, постоянно анализируются с целью выявления начала схода с рельса, схода с рельса, предельного износа или повреждения катка (катков) (9) или их шин (24). В результате обеспечивается раннее обнаружение опасности схода с рельса, выявление чрезмерного износа или повреждения шин направляющих катков. 13 з.п. ф-лы, 9 ил.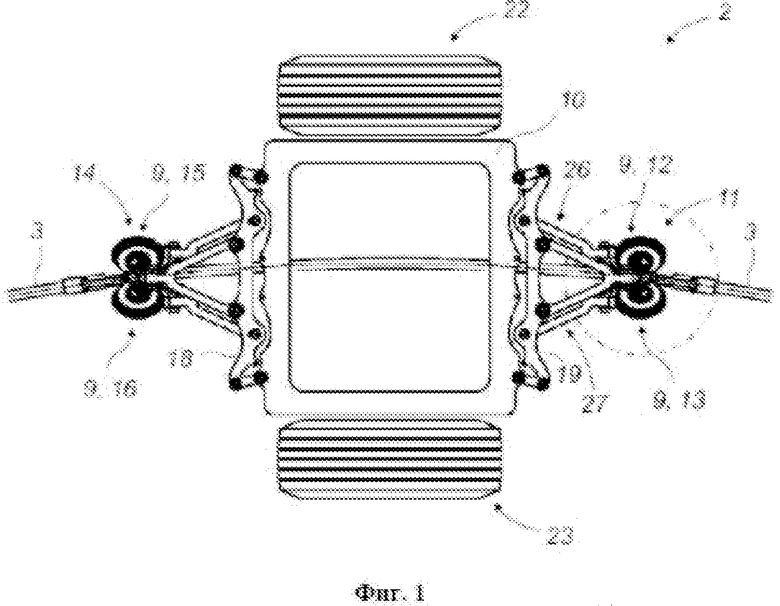
1. Направляющая система (2) наземного транспортного средства, направляемого вдоль по меньшей мере одного направляющего рельса (3), при этом направляющая система (2) оборудована системой (1) динамического контроля контакта с рельсом, при этом направляющая система (2) содержит по меньшей мере один каток (9) или по меньшей мере одну пару (11, 14) направляющих катков (9), качение которых происходит вдоль по меньшей мере одного направляющего рельса (3), при этом направляющая система (2) может иметь два различных состояния: первое состояние, в котором по меньшей мере один каток (9) или по меньшей мере одна пара (11, 14) катков осуществляет качение по меньшей мере по одному направляющему рельсу (3) посредством шины, поверхности качения или краевой области качения в условиях нормальной работы направляющей системы, и второе состояние, в котором часть, отличная от направляющей системы (2), например каток (катки) или выступающая поверхность крепления катков, катится или трется о направляющий рельс (3) или поверхность дорожного полотна в ситуации схода с рельса, отличающаяся тем, что:
• характеристики вибрации краевой области качения катка или катков в нормальном для качения контакте с направляющим рельсом (3) во время направляемого движения отличается от характеристик вибрации области в контакте с направляющим рельсом (3) или поверхностью дорожного полотна в ситуации схода с рельса;
• система (1) динамического контроля содержит вибрационный датчик (5), расположенный возле по меньшей мере одного катка (9) или по меньшей мере одной пары (11, 14) направляющих катков (9), и датчик (7) положения; и
• система (1) динамического контроля содержит блок обработки и анализа сигналов, поступающих от датчиков (5, 7) или из цепей, в которых они установлены, с целью их анализа и постоянного установления наличия или отсутствия превышения сигналами от вибрационного датчика (5) и сигналами от датчика (7) положения соответственно первого и второго порогов предупреждения, так что при превышении этих двух порогов подается тревожный сигнал о сходе с рельса.
2. Направляющая система (2) по п.1, отличающаяся тем, что жесткость части катка или катков в нормальном для качения контакте с направляющим рельсом во время направляемого движения меньше жесткости области в контакте с рельсом или поверхностью дорожного полотна в ситуации схода с рельса.
3. Направляющая система (2) по п.1, отличающаяся тем, что выступающая часть представляет собой реборду каждого катка, или кожух, или фиксированную относительно вращения поверхность крепления катков.
4. Направляющая система (2) по п.1, отличающаяся тем, что превышение первого порога предупреждения соответствует неисправности вибрационного датчика (5).
5. Направляющая система (2) по п.1, отличающаяся тем, что датчик (7) положения представляет собой датчик расстояния до верхней поверхности направляющего рельса (3).
6. Направляющая система (2) по п.1, отличающаяся тем, что датчик (7) положения представляет собой индуктивный датчик (8).
7. Направляющая система (2) по п.1, отличающаяся тем, что вибрационный датчик (5) представляет собой акселерометр (6).
8. Направляющая система (2) по п.1, отличающаяся тем, что порог значений устанавливается в зависимости от скорости транспортного средства.
9. Направляющая система (2) по предыдущему пункту, отличающаяся тем, что порог, зависящий от скорости транспортного средства, изменяется при превышении скоростью транспортного средства 15 км/ч.
10. Направляющая система (2) по п.1, отличающаяся тем, что блок обработки и анализа сигналов от датчиков представляет собой блок обработки и анализа частотного спектра.
11. Направляющая система (2) по п.10, отличающаяся тем, что блок обработки и анализа сигналов, поступающих от вибрационного датчика (5) и датчика (7) положения, содержит параллельно акселерометрический канал VACC, содержащий вибрационный модуль обработки MODVI, и индуктивный канал VINDU с индуктивным модулем обработки MODIN, при этом модули обработки соединены соответственно с передним и задним вибрационными датчиками (5) AccAV и AccAR в одном случае и с передним и задним датчиками (7) положения CiAV и CiAR в другом случае, при этом они оснащены различными выходами, при этом каждый оснащен выходом EtCAP, обеспечивающим передачу информации о состоянии датчиков, и каждый оснащен основным выходом, соединенным с многоканальным блоком сигнализации BALAM, при этом вибрационный модуль обработки MODVI принимает информацию о скорости VI и сигналы от переднего и заднего вибрационных датчиков (5) AccAV и AccAR и состоит из двух блоков обработки и анализа: одного блока низких частот BABF и одного расположенного рядом блока средних частот BAMF.
12. Направляющая система (2) по предыдущему пункту, отличающаяся тем, что блоки обработки BABF и BAMF принимают измеряемый сигнал SGAME от вибрационного датчика (датчиков) (5).
13. Направляющая система (2) по п.11 или 12, отличающаяся тем, что первый блок BABF содержит два канала: один канал среднего уровня для самых низких частот RMSBFI и второй канал среднего уровня для верхних низких частот RMSBFS, при этом в начале каждого из этих каналов предусмотрен соответственно один низкочастотный фильтр F1 в диапазоне B1 1-80 Гц и полосовой фильтр F2 в диапазоне B2 80-200 Гц, за которыми установлены модуль измерения уровня эффективного напряжения соответственно для самых низких частот B1, модуль RMSB1, и для верхних низких частот B2, модуль RMSB2, при этом два уровня сравниваются в модуле дифференциации RMSB1B2, так что при превышении разницей между ними заданного уровня срабатывает акселерометрическая сигнализация ALACC.
14. Направляющая система (2) по предыдущему пункту, отличающаяся тем, что в соседний блок анализа средних частот BAMF также подается измеряемый сигнал SGAME от вибрационного датчика (датчиков) (5), при этом в нем предусмотрен канал, содержащий полосовой фильтр F3 верхних средних частот в диапазоне B3 150-1000 Гц, за которым установлен модуль измерения уровня эффективного напряжения для верхних средних частот B3, модуль RMSB3, при этом этот уровень сравнивается с порогом S в компараторе COMB3, при этом, если этот порог S зависит от того, больше или меньше скорость транспортного средства значения минимальной скорости Vmin транспортного средства, кодирующее устройство присваивает порогу S отличающееся значение, если скорость транспортного средства меньше или больше значения Vmin, компаратор COMB3 передает тревожный сигнал, если уровень эффективного напряжения сигнала B3 больше величины порога S, при этом возможность подачи двух предупреждающих сигналов от двух блоков обработки по каналу акселерометрической сигнализации ALACC обеспечивает логический блок «ИЛИ».
| МОНОРЕЛЬСОВАЯ НАПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ АВТОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2136531C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СХЕМА ЗАГОЛОВКА ДЛЯ БЕСПРОВОДНОГО СИГНАЛА | 2008 |
|
RU2461148C2 |
| DE 202005011269 U1, 03.11.2005. | |||

