Изобретение относится к области транспортного машиностроения, может быть использовано при экспериментальном исследовании динамики управляемого движения и при создании систем управления движением роботизированным комплексом на базе гусеничных машин, оснащенных спутниковой навигационной системой.
При экспериментальном исследовании динамики управляемого движения и при создании систем управления движением роботизированным комплексом (РБТК) на базе гусеничных машин необходимо с большой точностью определять момент сопротивления повороту. Величина этого момента зависит от параметров конструкции машины (момента инерции вокруг вертикальной оси, продольных координат осей опорных катков относительно центра масс) кинематических параметров движения (углового ускорения, кривизны траектории, продольного смещения центра поворота, углов увода шин опорных катков) а также от значения коэффициента сопротивления боковому уводу. Основная сложность состоит в определении коэффициента сопротивления боковому уводу шин опорных катков с большой точностью. Величина этого коэффициента определяется по функции значения частной производной боковой силы действующей на опорный каток при повороте машины по значению угла бокового увода. Эта функция является случайной, не линейной зависит от вертикальной нагрузки и температуры шин, которые не стабильна вследствие интенсивного нагрева в процессе движения и многих других параметров. Аналитическое определение коэффициента сопротивления уводу из-за сложного характера маловероятно. В связи с этим значение коэффициента сопротивления шин боковому уводу определяется экспериментально. В общем случае движение гусеничной машины с большой скоростью по дорогам с интенсивным изменением кривизны траектории сопровождается продольным смещением полюса поворота машины. При этом углы увода шин опорных катков отдельных осей отличается до 10 раз, что приводят к вариации боковых сил, значения коэффициента сопротивления увода и момента сопротивления повороту. В связи с этим для синтеза программы управления движением РБТК, расчета требуемого значения поворачивающего момента при повороте гусеничной машины, для компенсации отклонения траектории, обеспечения устойчивости движения, необходимо измерять значения коэффициентов сопротивления увода шин опорных катков каждой оси.
Известная система для определения коэффициента сопротивления шин опорных катков гусеничных машин (Динамика быстроходного танка. Под ред. Л.В. Сергеева. Москва.: Изд. ВАБТВ 1968, рис 2-11 стр. 108-109 Аналог). Система включает 2 мерных колеса (типа пятых колес), поворотные вилки которых устанавливаются в вертикальных втулках штанг, закрепленных в носовой и кормовой частях корпуса машины. При движении гусеничной машины в повороте мерные колеса и их поворотные вилки поворачиваются на углы увода соответственно θп - передних, и θз - задних колес. Величина этих углов измеряется реохордными датчиками, соединенных с регистрирующим устройством. Измерение момента, поворачивающего машину, осуществляется тензодатчиками наклеенными на валы, соединяющие трансмиссию с бортовыми редукторами. Выходы тензодатчиков соединены с регистрирующим устройством через ртутный токосъемник. При равномерном повороте движущейся машины с небольшой скоростью по окружности определенного радиуса поворачивающий момент равен моменту сопротивления поворота формируемым грунтом. При этих условиях проведения испытания среднее значение углов увода шин опорных катков ограничено, а среднее значение коэффициента сопротивления уводу определяется частным от деления поворачивающего момента на кривизну траектории и сумму квадратов продольных координат осей опорных катков относительно центра масс.
Недостаток этой системы состоит в низкой точности определения коэффициента сопротивления уводу. Это связано с тем, что в общем случае движение гусеничной машины с большой скоростью по дорогам с интенсивным изменением кривизны траектории, момент сопротивления повороту формируется не только сопротивлением грунта, но и дополнительными составляющими, инерционной и бокового движения. Как показано выше, при продольном смещении центра поворота углы увода шин опорных катков отдельных осей отличается до 10 раз, что приводят к вариации боковых сил, значения коэффициента сопротивления увода. Кроме того, при движении машины с большой скоростью наблюдается шимми мерных колес, что дополнительно снижает точность измерения.
Наиболее близким по технической сути и достигаемому результату является конструкция стенда для определения статических и динамических упругих характеристик, виброзащитных свойств шин, а также характеристик бокового увода и сопротивления качения шин (Патент №2133459 (РФ) Стенд для испытания пневматических шин и упругих элементов транспортных средств / Рябов И.М., Новиков В.В., Чернышев К.В. и др. - Опубл. 20.07.99 - БИ №20, 1999 г. Прототип)
Конструкция этого стенда содержит ведущие и ведомые барабаны, охваченные гибкой лентой, для установки на нее испытуемого колеса. Под гибкой лентой в зоне ее контакта с испытуемой шиной колеса устанавливаются опорные элементы. Для нагружения колеса в вертикальной плоскости введено прижимное устройство, а для имитации качения колеса с уводом введено устройство для поворота в плоскости качения колеса относительно плоскости движения гибкой ленты. Конструкция стенда содержит также устройство для измерения боковой силы и величины задаваемого бокового угла. По измеренным значениям представляется возможным строить характеристику бокового увода шины колеса -зависимость боковой силы от угла увода. По этой зависимости определяется коэффициент сопротивления боковому воду, как частная производная боковой силы по углу увода.
Недостаток конструкции данного стенда состоит в том, что для определения характеристики бокового увода шин опорных катков гусеничных машин невозможно учесть особенность взаимодействия шин с дорогой через гусеницу с опорной поверхностью и деформацию балансира блока подвески. Кроме того, не представляется возможным учесть множество факторов приведенных выше, действующих на шины опорных катков гусеничной машины в процессе движения и влияющих на значения коэффициента сопротивления боковому уводу.
В связи с этим предлагается система дистанционного (телеметрического) измерения коэффициента сопротивления уводу шин опорных катков, которая является дальнейшим развитием прототипа, исключает указанные выше недостатки на основе реализации современных инновационных технологий. В предлагаемой конструкции системы коэффициент сопротивления уводу определяется в реальных режимах движения гусеничной машины. Значения этого коэффициента определяются, как и в прототипе по характеристике бокового увода. При этом боковые силы определяются по сигналам датчиков боковых сил, устанавливаемых на балансирах блоков подвески, а значения углов бокового увода отдельных опорных катков определяется на основе измерений с использованием спутниковой навигационной системы ориентации.
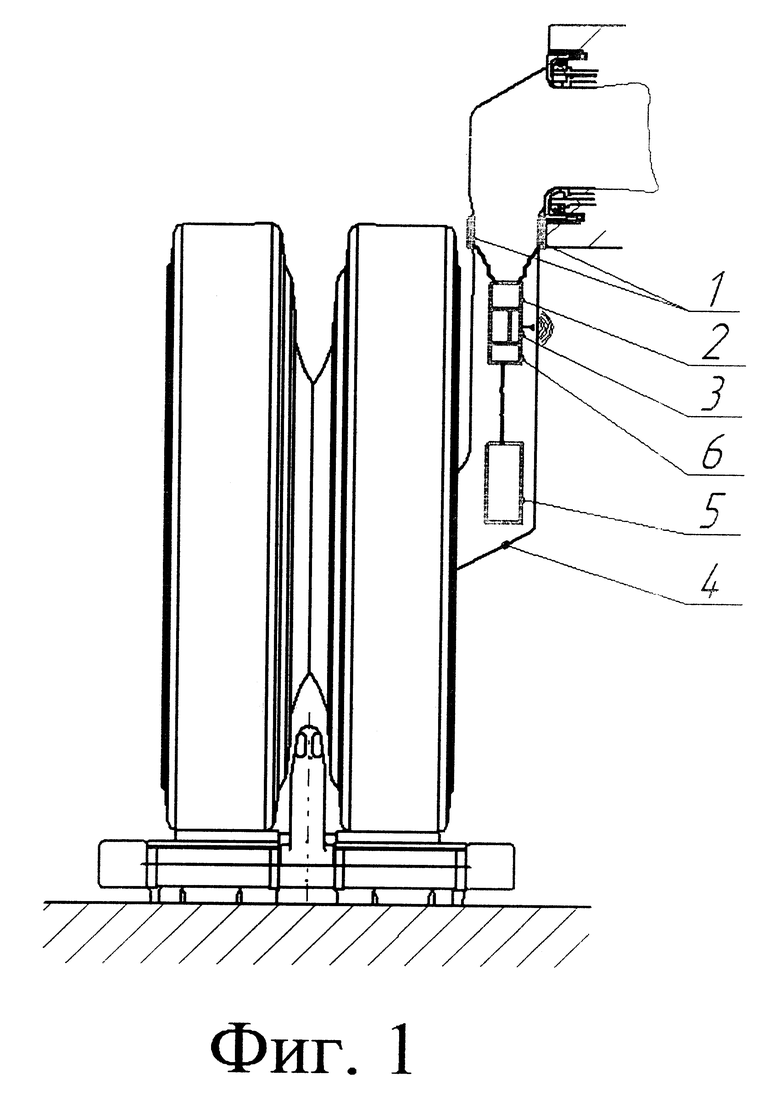
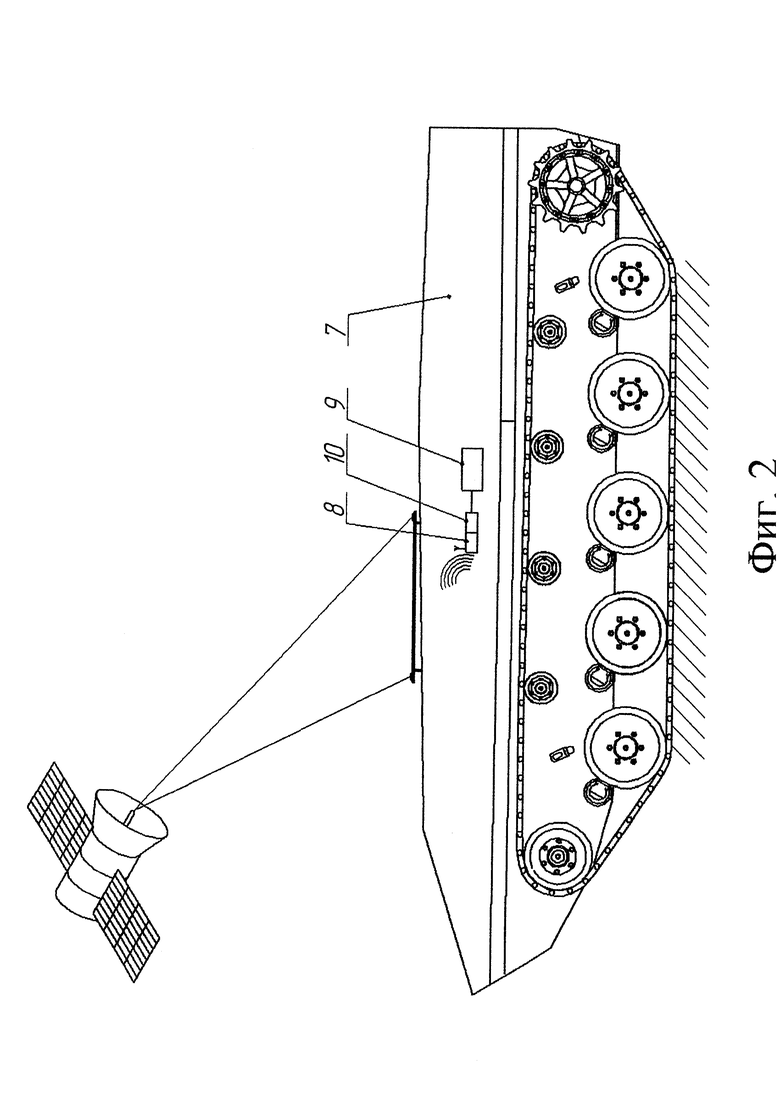
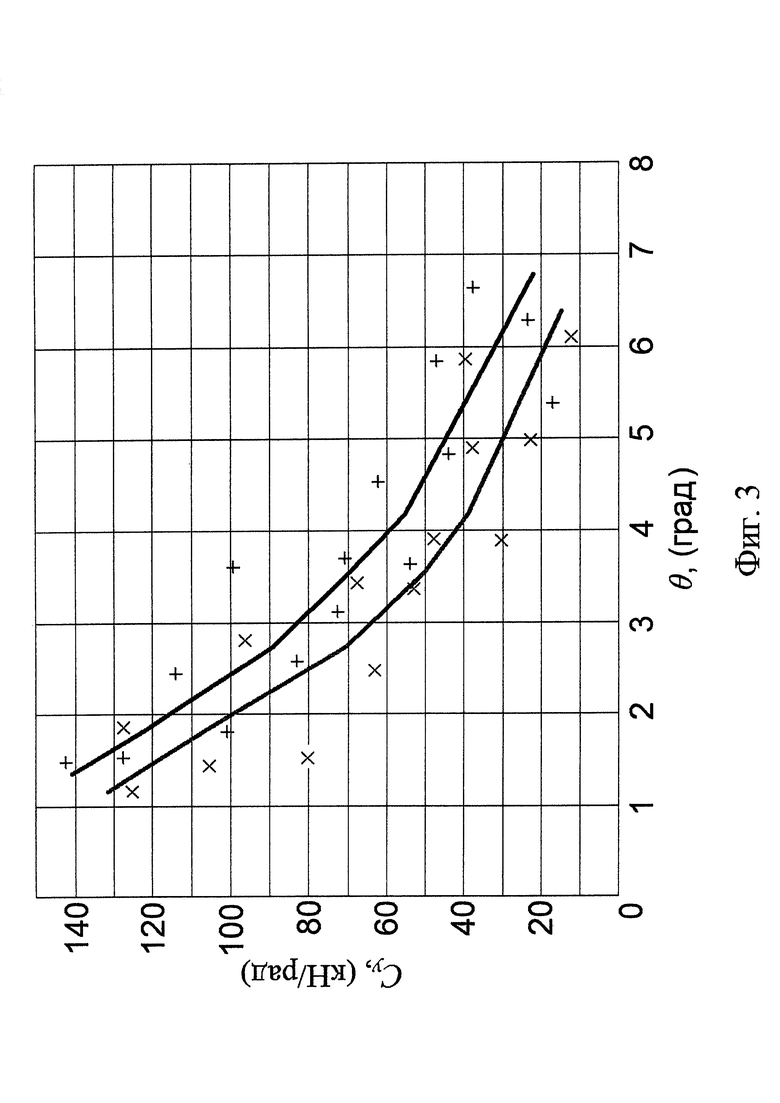
На фиг. 1 показана схема крепления измерительной и передающей части системы на балансире блока подвески опорного катка, на фиг. 2 - схема крепления принимающей и регистрирующей части системы на корпусе машины. На фиг. 3 приведены результаты измерения характеристики бокового увода предлагаемой системой и соответствующая ей функция зависимости коэффициента сопротивления уводу от угла увода шин опорного катка.
Система измерения (фиг. 1) включает датчик боковой силы 1, расположенный в наиболее чувствительной части стебля балансира блока подвески, разъем датчика 1 соединен с микроконтроллером 2, который является аппаратно-программным средством для построения систем автоматики и робототехники. К выходному порту микроконтроллера 2 подключается радио-модуль 3 (с передающей антенной), например, NRF24L01. Микроконтроллер 2 и радио-модуль 3 крепятся к оси балансира опорного катка 4. К оси опорного катка 4 крепится вибрационный харвестер 5, например, V21B2 фирмы Volture. Харвестер 5 через преобразователь напряжения 6, например, Seiko Epson S-882Z, соединен с микроконтроллером 2 и радио-модулем 3. Датчик боковой силы 1, микроконтроллер 2, радио-модуль 3, харвестер 5 и преобразователь напряжения 6 образуют измерительно-передающую часть системы. Принимающая и регистрирующая часть системы (фиг. 2) размещены на корпусе 7 быстроходной гусеничной машины и включает ответный радио-модуль 8, функции которого могут быть реализованы устройством NRF24L01. Радио-модуль 8 соединен с регистратором Racelogic VBOX3i 9, через микроконтроллер 10, например, ATmega2560.
Величина углов увода шин опорных катков измеряется спутниковой навигационной системой Racelogic по координатам осей опорных катков относительно спутниковых антенн.
Работает предлагаемая система следующим образом. В процессе движения машины происходят колебания опорных катков и закрепленного на оси опорного катка харвестера 5. При механических колебаниях харвестер 5 вырабатывает электрическую энергию, являясь автономным источником питания передающей части системы. Стабилизация питающего напряжения для передающей части системы осуществляется преобразователем напряжения 6. Аналоговый сигнал датчика 1 боковой силы поступает на микроконтроллер 2, который преобразует его в цифровой сигнал. Радио-модуль 3, подключенный к выходному порту микроконтроллера 2 передает данные с датчика 1. Регистрация измеренного параметра осуществляется регистратором 9 Racelogic VBOX3i, принятого радио-модулем 8 и обработанным в микроконтроллере 10. Значения боковых сил и углов увода опорных катков статистически обрабатывается, синхронизируется во времени и строится характеристика бокового увода шин опорных катков (фиг. 3) в виде зависимости боковой силы от угла увода. По этой характеристики определяется коэффициент сопротивления уводу как производная по углу увода, выше приведенной характеристики.
Полученные значения используются в программе управления движением РБТК при управлении поворотом из условия обеспечения устойчивости и компенсации отклонения траектории движения с требуемой точностью.
Эффективность предлагаемой системы заключаются в том, что представляется возможным измерять коэффициент сопротивления уводу с учетом взаимодействия шин опорных катков с дорогой через гусеницу, а также с учетом деформации балансира в реальных условиях движения машины. Это создает предпосылки совершенствования программ управления РБТК и адекватного моделирования процесса управляемого движения. Кроме того, снижается трудоемкость измерения коэффициента сопротивления боковому уводу шин, так как измерения осуществляются без остановки машины. Предлагаемая конструкция системы позволяет экспериментально определить с высокой точностью характеристику бокового увода шин опорных катков при устранении субъективного фактора, повысить производительность, снизить трудоемкость измерений путем автоматизации измерения, последующей обработки результатов, анализа и хранения информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ПОВОРАЧИВАЮЩЕГО МОМЕНТА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ | 2017 |
|
RU2665159C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАКТОРА | 1999 |
|
RU2162629C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ СОДЕЙСТВИЯ РУЛЕВОМУ УПРАВЛЕНИЮ | 2016 |
|
RU2701289C2 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765511C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765581C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765318C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765582C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765584C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765320C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2767459C1 |
Изобретение относится к области транспортного машиностроения, может быть использовано при экспериментальном исследовании динамики управляемого движения и при создании систем управления движением роботизированным комплексом на базе гусеничных машин, оснащенных спутниковой навигационной системой. Система дистанционного телеметрического коэффициента сопротивления уводу опорных катков быстроходных гусеничных машин состоит из устройства измерения боковой силы, действующей на опорный каток при его качении с уводом, и устройства измерений угла бокового увода. Датчик боковой силы расположен в наиболее чувствительной части стебля балансира. Разъем датчика соединяется с микроконтроллером, прикрепленным к оси балансира. К выходному порту микроконтроллера подсоединен радио-модуль. К оси опорного катка крепится вибрационный харвестер, преобразующий энергию механических колебаний в электрическую. Харвестер через преобразователь напряжения питает микроконтроллер и радио-модуль, а ответный (принимающий) радио-модуль расположен на корпусе машины и подсоединен к компьютеру через дополнительный микроконтроллер. Величина углов бокового увода шин опорных катков измеряется спутниковой навигационной системой Racelogic по координатам осей опорных катков относительно спутниковых антенн. Технический результат – повышение точности определения характеристик бокового увода шин опорных катков при устранении субъективного фактора, повышение производительности и снижение трудоемкости измерений путем автоматизации измерения, последующей обработки результатов, анализа и хранения информации. 3 ил.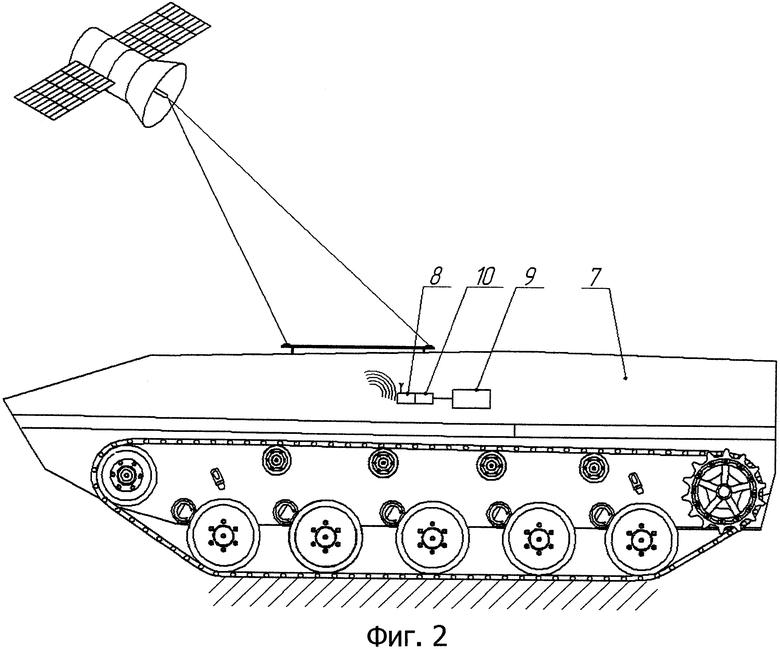
Система дистанционного телеметрического измерения коэффициента сопротивления уводу шин опорных катков быстроходных гусеничных машин, состоящая из устройства измерения боковой силы, действующей на опорный каток при его качении с уводом, и устройства измерений угла бокового увода, отличающаяся тем, что датчик боковой силы расположен в наиболее чувствительной части стебля балансира, разъем датчика соединяется с микроконтроллером, прикрепленным к оси балансира, к выходному порту микроконтроллера подсоединен радио-модуль, к оси опорного катка крепится вибрационный харвестер, преобразующий энергию механических колебаний в электрическую, харвестер через преобразователь напряжения питает микроконтроллер и радио-модуль, а ответный (принимающий) радио-модуль расположен на корпусе машины и подсоединен к компьютеру через дополнительный микроконтроллер, величина углов бокового увода шин опорных катков измеряется спутниковой навигационной системой Racelogie по координатам осей опорных катков относительно спутниковых антенн.
| Способ испытания мобильных боевых робототехнических комплексов и стенд для его осуществления | 2016 |
|
RU2630860C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПНЕВМАТИЧЕСКИХ ШИН И УПРУГИХ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2133459C1 |
| US 20040167682 A1, 26.08.2004. | |||

