Изобретение относится к области магнитного резонанса, области магнитно-резонансной спектроскопии, области магнитно-резонансной томографии, области диагностической визуализации и к связанным областям.
Магнитный резонанс (MR) является известной методикой, которая полезна в медицинской диагностике, ветеринарной работе, криминалистике, археологии и так далее. Чаще всего изображение MR формируется путем возбуждения, пространственного кодирования и считывания сигнала магнитного резонанса 1H. Больше информации можно получить с помощью магнитно-резонансной спектроскопии (MRS), в которой получается и анализируется спектр отклика MR. Например, сигнал MR 1H можно разделить с помощью MRS, чтобы различить некоторое количество разных составляющих сигналов, исходящих из водорода в разных химических средах, например воде (H2O), жире, ткани или других углеводородах, и т.д. MRS может выполняться в одном местоположении (это называется "спектроскопией одного воксела", или SV) или может получаться для сетки вокселей, чтобы создать (с помощью подходящей обработки данных) изображение (это называется "магнитно-резонансной спектроскопической визуализацией", или MRSI). При использовании в данном документе термин "магнитно-резонансная спектроскопия", или MRS, включает в себя MRSI и SV.
В самых распространенных субъектах MR, например людях и животных, сигнал воды является преобладающей составляющей спектра 1H. Чтобы точно измерить части спектра 1H помимо водяного пика, известно подавление сигнала воды перед сбором данных, используя подходящий импульс подавления воды или последовательность импульсов. Результирующий спектр 1H с подавлением воды является слабым и может искажаться артефактами, например фазовым искажением и/или дрейфом поля B0. Чтобы выполнить коррекцию фазы и B0 и тем самым получить более точные спектры MRS, известно получение дополнительного сигнала 1H, в котором сигнал воды не подавляется. Этот дополнительный сигнал без подавления воды включает в себя неподавленную водяную составляющую и поэтому сильнее, чем сигнал с подавлением воды. Соответственно, сигнал без подавления воды служит соответствующим образом в качестве эталонного сканирования для выполнения коррекции фазы и B0.
Проблема с этим подходом состоит в том, что дополнительное сканирование без подавления воды существенно увеличивает общее время сканирования. Кроме того, поскольку опорный сигнал воды и сигнал MRS формируются разными сканированиями, опорный сигнал (без подавления воды) может иметь разное фазовое искажение и/или дрейф B0 по сравнению с сигналом MRS из-за неустойчивости системы, что может ухудшить эффективность коррекции фазы и/или B0. Общее время повторения (TR) для сочетания сканирования MRS и эталонного сканирования обычно составляет по меньшей мере 3000 мс (где "мс" обозначает "миллисекунды"), что предоставляет значительное время, чтобы неустойчивость системы создала проблемы.
Нижеследующее предоставляет новые и усовершенствованные устройства и способы, которые раскрываются в этом документе.
В соответствии с одним раскрытым аспектом выполняется последовательность магнитного резонанса (MR), включающая в себя: применение подготовительной подпоследовательности MR, обеспечивающей подавление сигнала воды; выполнение подпоследовательности магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS 1H с подавлением сигнала воды; и выполнение контрольной подпоследовательности MR после подпоследовательности MRS, чтобы получить эталонные данные MR, в которых возбуждающий импульс для контрольной подпоследовательности MR имеет угол наклона вектора в 5° или меньше. Коррекция фазы и B0 в данных MRS 1H с подавлением сигнала воды выполняется с использованием эталонных данных MR, чтобы сформировать скорректированные данные MRS. В некоторых вариантах осуществления сочетание подпоследовательности MRS и контрольной подпоследовательности MR выполняется за интервал времени меньше либо равный 1000 мс. В некоторых вариантах осуществления никакая временная задержка не вносится между окончанием подпоследовательности MRS и возбуждающим импульсом контрольной подпоследовательности MR.
В соответствии с другим раскрытым аспектом устройство содержит контроллер магнитного резонанса (MR), сконфигурированный для побуждения сканера MR выполнить последовательность MR, включающую в себя: применение подготовительной подпоследовательности MR, обеспечивающей подавление сигнала воды; выполнение подпоследовательности магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS с подавлением сигнала воды; и выполнение контрольной подпоследовательности MR после подпоследовательности MRS, чтобы получить эталонные данные MR. Последовательность MR имеет время повторения (TR) в 2000 мс или меньше. В некоторых вариантах осуществления возбуждающий импульс контрольной подпоследовательности MR имеет угол наклона вектора в 5° или меньше. В некоторых вариантах осуществления возбуждающий импульс контрольной подпоследовательности MR имеет угол наклона вектора в 3° или меньше. В некоторых вариантах осуществления устройство дополнительно содержит модуль обработки данных MRS, сконфигурированный для выполнения коррекции фазы и B0 у данных MRS с подавлением сигнала воды, используя эталонные данные MR, чтобы сформировать скорректированные данные MRS.
В соответствии с другим раскрытым аспектом носитель информации хранит команды, исполняемые цифровым процессором, чтобы побудить сканер магнитного резонанса (MR) выполнить последовательность MR, включающую в себя: применение подготовительной подпоследовательности MR, обеспечивающей подавление сигнала MR из источника преобладающего сигнала; выполнение подпоследовательности магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS с подавлением сигнала MR из источника преобладающего сигнала; и выполнение контрольной подпоследовательности MR, чтобы получить эталонные данные MR. Контрольная подпоследовательность MR выполняется после подпоследовательности MRS и пока подготовительная подпоследовательность MR продолжает обеспечивать некоторое подавление сигнала MR из источника преобладающего сигнала. Возбуждающий импульс контрольной подпоследовательности MR имеет угол наклона вектора в 5° или меньше, а предпочтительнее имеет угол наклона вектора в 3° или меньше. В пояснительных вариантах осуществления, изложенных в этом документе, источником преобладающего сигнала является вода.
Одно преимущество состоит в быстром получении MRS, при этом легко достижимы получения MRS 1H, имеющие общее время повторения (TR) в 1500-2000 мс.
Другое преимущество состоит в более точной коррекции фазы и B0 у спектров MRS с использованием сигнала воды без подавления воды.
Дополнительные преимущества станут очевидны специалистам в данной области техники на основе изучения нижеследующего подробного описания.
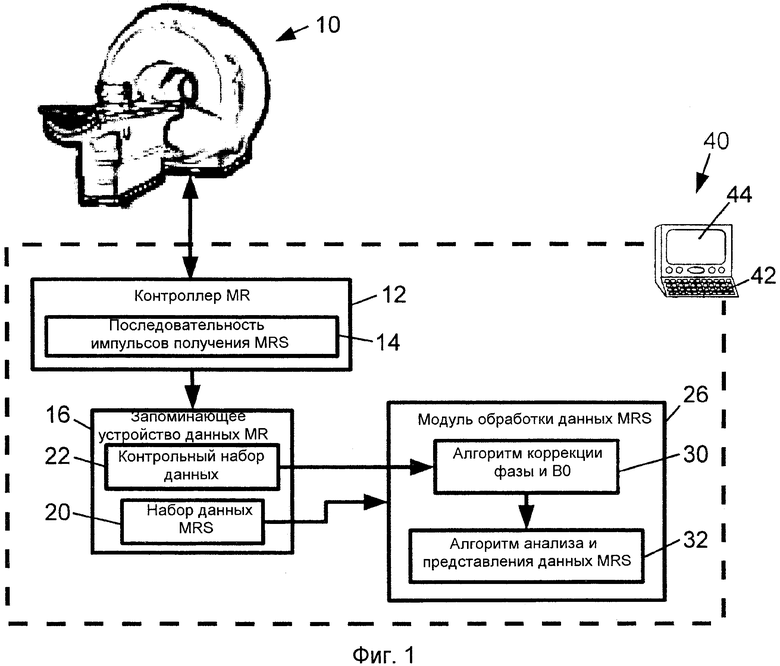
Фиг.1 схематично показывает систему магнитного резонанса (MR), сконфигурированную для выполнения магнитно-резонансной спектроскопии (MRS), которая раскрывается в этом документе.
Фиг.2 схематично показывает схему последовательности импульсов для последовательности получения MRS, применяемой системой MR из Фиг.1.
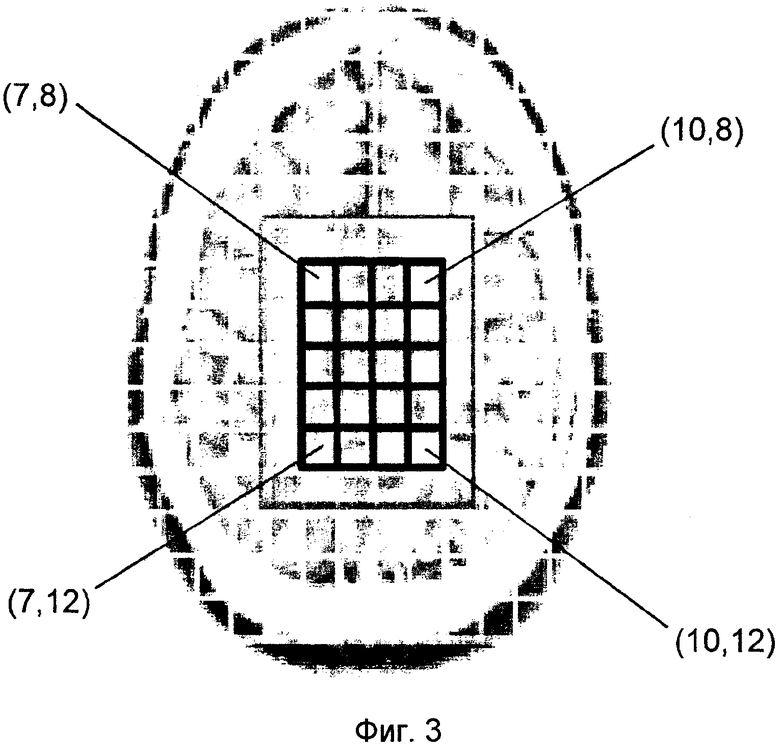
Фиг.3 схематично показывает изображение мозга с наложенной сеткой вокселей MRSI 4×5.
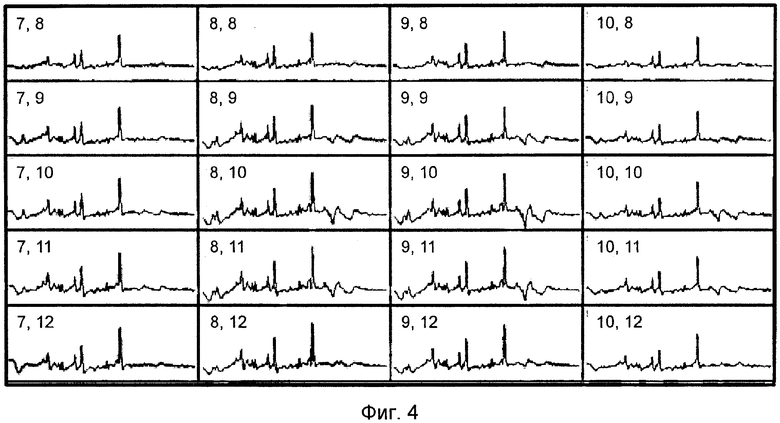
Фиг.4 показывает спектры MRS для двадцати вокселей в сетке вокселей MRSI 4×5 из Фиг.3 с ручной коррекцией фазы.
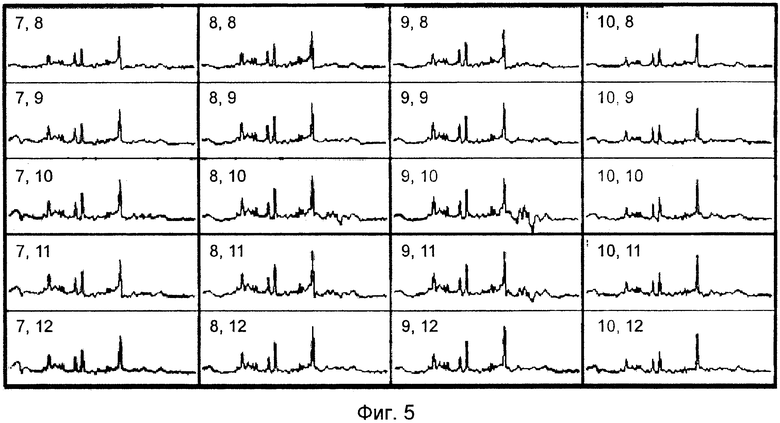
Фиг.5 показывает спектры MRS для двадцати вокселей в сетке вокселей MRSI 4×5 из Фиг.3 с автоматической коррекцией фазы и B0, которая раскрывается в этом документе.
Со ссылкой на Фиг.1, система магнитного резонанса включает в себя сканер 10 магнитного резонанса (MR), например проиллюстрированный сканер MR Achieva™ (доступный от Koninklijke Philips Electronics N.V., Эйндховен, Нидерланды), либо сканер MR Intera™ или Panorama™ (оба также доступны от Koninklijke Philips Electronics N.V.), либо другой серийно выпускаемый сканер MR или некоммерческий сканер MR, и т.д. В типичном варианте осуществления сканер MR включает в себя внутренние компоненты (не проиллюстрированы), например сверхпроводящий или резистивный главный магнит, формирующий статическое (B0) магнитное поле, наборы обмоток градиентных катушек магнитного поля для наложения выбранных градиентов магнитного поля на статическое магнитное поле, систему радиочастотного возбуждения для формирования радиочастотного (B1) поля с частотой, выбранной для возбуждения магнитного резонанса (обычно магнитного резонанса 1H, хотя также предполагается возбуждение других ядер магнитного резонанса или нескольких ядер магнитного резонанса), и радиочастотную приемную систему, включающую в себя радиочастотный приемный массив катушек или множество приемных катушек, для обнаружения сигналов магнитного резонанса, излученных от субъекта.
Со ссылкой на Фиг.1 и дополнительно на Фиг.2, сканер 10 MR работает под управлением модуля 12 управления магнитным резонансом (MR) для выполнения магнитно-резонансной спектроскопии (MRS) с использованием последовательности 14 импульсов MRS, которая включает в себя подготовительную часть Sprep, подпоследовательность MRS SMRS и перемеженный навигатор, содержащий контрольную подпоследовательность SRef. Последовательность 14 импульсов MRS используется соответствующим образом для спектроскопической визуализации MR (MRSI) или для обнаружения с одним вокселом (SV). Запоминающее устройство 16 данных MR накапливает данные, полученные с помощью подпоследовательности SMRS получения MRS, в виде набора 20 данных MRS, и накапливает данные, полученные с помощью контрольной подпоследовательности SRef, в виде контрольного набора 22 данных. Модуль 26 обработки данных MRS обрабатывает наборы 20, 22 данных для создания полезной информации. Модуль 26 обработки данных MRS реализует алгоритм 30 коррекции фазы и B0, который корректирует набор 20 данных MRS с использованием контрольного набора 22 данных, и скорректированные данные MRS анализируются и/или представляются алгоритмом 32 анализа и представления данных MRS, реализованным модулем 26 обработки данных MRS. Представление данных может принимать различные формы, например вычерчивание спектра MRS для воксела в зависимости от частоты (или волнового числа либо другой спектральной метрики), отображение изображения, чьи интенсивности пикселя или воксела соответствуют максимальному значению интересующего пика спектра MRS, вычерчивание максимального значения интересующего пика спектра MRS для одного воксела со временем, чтобы извлечь функциональную информацию, и т.д.
Различные вычислительные и запоминающие компоненты 12, 16, 26 соответствующим образом реализуются иллюстративным компьютером 40 или другим устройством цифровой обработки, применяющим многоядерный процессор или другой процессор с параллелизмом, одноядерный процессор, блок графической обработки, то есть GPU, и т.д., и имеющим коммуникационную шину или другое функциональное соединение со сканером 10 MR, чтобы побудить сканер 10 MR выполнить сбор данных MRS. Хотя устройство цифровой обработки применяет цифровой процессор, также предполагается, что устройство цифровой обработки включает в себя или имеет доступ к некоторым аналоговым схемам, например аналоговым или гибридным цифроаналоговым специализированным интегральным схемам (ASIC). Раскрытые методы MRS также можно реализовать в виде носителя информации, хранящего команды, которые при исполнении процессором в устройстве 40 цифровой обработки выполняют раскрытые операции. Например, носитель информации может содержать жесткий диск, накопитель на оптических дисках, оперативное запоминающее устройство (RAM), флэш-память или другое электростатическое запоминающее устройство, различные их сочетания или другой подходящий носитель информации. Эти типы носителей информации также могут использоваться в качестве запоминающего устройства 16 данных MR. Конечно, в некоторых вариантах осуществления распространенный носитель информации (например, накопитель на жестком диске компьютера) может воплощать запоминающее устройство 16 данных MR, а также хранить команды, которые при исполнении процессором в устройстве 40 цифровой обработки выполняют раскрытые операции.
Система MR также обычно включает в себя иллюстративную клавиатуру 42 или другое пользовательское устройство ввода (например, мышь, шаровой манипулятор или другое указательное устройство), посредством которого пользователь вводит команды, параметры и т. д. для инициирования и управления получением MRS, обработкой данных и/или представлением данных. Спектры MRS, изображения MRSI или другое представление данных MRS, выведенные модулем 26 обработки данных MRS, отображаются соответствующим образом на устройстве отображения, например, иллюстративном устройстве 44 отображения компьютера 40. Хотя различные обрабатывающие компоненты 12, 26, запоминающее устройство 16 данных и компоненты 42, 44 осуществления связей с пользователем иллюстрируются как интегрированные или объединенные в один компьютер 40, понятно, что эти различные компоненты и/или запоминающие устройства вместо этого могут быть по-разному реализованы разными компьютерами, сетевыми серверами, процессорами на интернет-технологиях, компонентами сети "облачных" вычислений и т.д.
Последовательность 14 импульсов MRS показана как взаимосвязанная с контроллером 12 MR. Например, последовательность 14 импульсов MRS может храниться в запоминающем устройстве или на носителе информации контроллера 12 MR. В альтернативном подходе последовательность 14 импульсов MRS может храниться на носителе информации, который является отдельным, но состоит в функциональном взаимодействии с контроллером 12 MR. Последовательность 14 импульсов MRS может храниться в виде команд, выполняемых контроллером 12 MR, или в виде данных, на которые воздействует контроллер 12 MR. В качестве примера последнего каждый импульс в последовательности 14 импульсов MRS можно представить источником (например, радиочастотной катушкой, градиентной катушкой магнитного поля или другим генератором) и параметрами импульса, например амплитудой импульса, длительностью, частотой и т.д.
Согласно Фиг.2 иллюстративная последовательность 14 импульсов MRS описывается с дополнительными подробностями. Фиг.2 показывает схематичное представление последовательности 14 импульсов MRS, включая характерные признаки, описанные в этом документе. Последовательность 14 импульсов MRS может включать в себя дополнительные или другие импульсы, которые не проиллюстрированы на Фиг.2. Например, при использовании в получении MRSI последовательность 14 импульсов MRS обычно включает в себя подходящие импульсы градиентов магнитного поля пространственного кодирования, которые не показаны на Фиг.2.
Подготовительная подпоследовательность Sprep MR обеспечивает подавление сигнала воды и, при желании, другие функциональные возможности. Например, иллюстративная подпоследовательность Sprep MR включает в себя импульсы подавления воды и/или импульсы подавления наружного объема (OVS). Подпоследовательность SMRS MRS может применять практически любую последовательность получения магнитно-резонансной спектроскопии и может быть избирательной по объему или срезу с технологией PRESS или STEAM. Иллюстративная подпоследовательность SMRS MRS включает в себя возбуждающий импульс (α) и два перефокусирующих импульса (β) с последующим сбором данных во время затухания свободной индукции (FID) у возбужденного сигнала MR. Длительность подпоследовательности SMRS MRS обозначается здесь в виде TMRS. Контрольная подпоследовательность SRef MR соответственно является повторением подпоследовательности MRS, но с возбуждающим импульсом с малым углом наклона вектора (обозначенным в этом документе как γ). В некоторых вариантах осуществления γ меньше либо равен 5°. В некоторых вариантах осуществления γ меньше либо равен 3°. Длительность контрольной подпоследовательности SRef MR обозначается здесь в виде TRef. Этот интервал времени можно сделать коротким, например TRef ≤ 500 мс.
Раскрытая последовательность MR для сбора данных MRS использует некоторые наблюдения, сделанными здесь. Одно наблюдение состоит в том, что (под)последовательность SMRS MRS имеет малую длительность в части получения, но имеет большое время повторения (TR) для восстановления подавления воды. Например, в некоторых вариантах осуществления подпоследовательность SMRS MRS имеет длительность (TMRS) 500 мс или меньше, а предпочтительнее имеет длительность 300 мс или меньше. С другой стороны, TR обычно составляет около 2000 мс, а в некоторых вариантах осуществления 1500 мс или короче. Это означает, что имеется длительное "непроизводительное" время между полезным окончанием получения MRS и его следующим повторением. В последовательности 14 MRS часть этого "непроизводительного" времени используется для получения контрольной подпоследовательности SRef MR.
Другое сделанное наблюдение состоит в том, что опорный сигнал для коррекции фазы и B0 у данных MRS не требует мощного сигнала воды. Таким образом, контрольная подпоследовательность SRef MR выполняется соответствующим образом после подпоследовательности SMRS MRS с минимальной задержкой между подпоследовательностями SMRS и SRef. Таким образом, в некоторых вариантах осуществления никакая временная задержка не вносится между окончанием подпоследовательности SMRS MRS и возбуждающим импульсом γ контрольной подпоследовательности SRef MR. Задержка между окончанием подпоследовательности SMRS MRS и началом контрольной подпоследовательности SRef MR предпочтительно минимизируется, поскольку, как установлено, сигнал воды восстанавливается во время подпоследовательности SMRS до уровня, который уже достаточно высокий, чтобы служить в качестве опорного сигнала. Также с этой целью в некоторых вариантах осуществления отсутствует градиентный импульс, помещенный между окончанием подпоследовательности SMRS MRS и началом контрольной подпоследовательности SRef MR.
В некоторых вариантах осуществления контрольная подпоследовательность SRef MR имеет одинаковый период с SMRS и создается для ограничения своего влияния на восстановление сигнала MRS в Z-направлении между окончанием полезного получения MRS и началом следующего времени повторения (TR). С этой целью возбуждающий импульс (обозначенный здесь как γ) для контрольной подпоследовательности SRef MR сделан небольшим. В некоторых вариантах осуществления возбуждающий импульс γ для контрольной подпоследовательности SRef MR имеет угол наклона вектора в 5° или меньше. В некоторых вариантах осуществления возбуждающий импульс γ имеет угол наклона вектора в 3° или меньше. С использованием этих принципов проектирования последовательность 14 MR может иметь около 90% отношения сигнал-шум (SNR) у подходов, применяющих большие углы наклона вектора для эталонного сканирования, поддерживая при этом TR для полной последовательности 14 MR (включающей в себя контрольную подпоследовательность SRef MR) короче 2000 мс, что на 50% короче способов, использующих больший угол наклона вектора для эталонного сканирования. Увеличение скорости получения достигается с использованием малого угла наклона вектора для возбуждающего импульса γ (например, меньше либо равного 5°, а предпочтительнее меньше либо равного 3°).
Сочетание (1) минимальной задержки между окончанием подпоследовательности SMRS MRS и началом контрольной подпоследовательности SRef MR и (2) малого угла наклона вектора для возбуждающего импульса γ для контрольной подпоследовательности SRef MR преимущественно обеспечивает более точную коррекцию фазы и B0. Минимизируется время, за которое может дрейфовать поле B0.
Для сканирования SV искажение нулевого порядка и линейное фазовое искажение опорного сигнала воды вычисляется и используется для выполнения коррекции фазы в данных из второй части для каждого периода TR. Для сканирования с визуализацией химического сдвига (CSI) обработка начинается соответствующим образом после того, как завершается сканирование, при этом эталонные данные обрабатываются с помощью быстрого преобразования Фурье (FFT) в пространственном измерении, и информация о фазовом искажении и дрейфе B0 вычисляется для каждого воксела и используется для выполнения коррекции фазы и B0 в данных из второй части того же воксела. Обработка данных является автоматической, а результаты соответствующим образом сохраняются в системной базе данных изображений DICOM (Формирование, передача и хранение медицинских изображений) для дополнительного использования.
Со ссылкой на Фиг.3-5 раскрытая быстрая последовательность MRS была реализована в реальной MRSI мозга. Были получены данные CSI PRESS добровольца с использованием следующих параметров сканирования: TR = 2000 мс, TE = 38 мс, с использованием восьмиканальной фазированной катушки для головы и системы Philips Achieva™ 3.0T. Фиг.3 показывает местоположение VOI и полученной матрицы вокселей CSI 4×5. Фиг.4 показывает данные CSI без эталонного сканирования после ручного фазирования. Остается некоторая степень фазового искажения, которая не была скорректирована для некоторых вокселей. Фиг.5 показывает результат для сканирования последовательности PRESS со сканированием перемеженного навигатора (то есть сканированием 14 MRS из Фиг.2). Для этих данных никакая дополнительная обработка не использовалась. На Фиг.4 и 5 идентификации вокселов матрицы CSI обозначаются в правом верхнем углу каждого спектра. На Фиг.3 обозначаются только воксели в левом верхнем (7, 8), правом верхнем (10, 8), левом нижнем (7, 12) и правом нижнем (10, 12) углах.
Иллюстративные варианты осуществления относятся к MRS 1H, в которой преобладающий сигнал воды подавляется для обеспечения более точных неводных спектров. В более общем смысле раскрытые подходы могут применяться для других типов MRS, в которых подавляется источник преобладающего сигнала.
Выше описаны один или несколько предпочтительных вариантов осуществления. На основе изучения предшествующего подробного описания могут быть созданы модификации и изменения. Подразумевается, что настоящее раскрытие должно толковаться как включающее в себя все такие модификации и изменения в той мере, как они входят в объем прилагаемой формулы изобретения либо ее эквивалентов.
Использование: для исследования объекта посредством методики магнитного резонанса. Сущность изобретения заключается в том, что выполняется последовательность магнитного резонанса (MR), включающая в себя применение подготовительной подпоследовательности MR (Sprep), обеспечивающей подавление сигнала воды; выполнение подпоследовательности (SMRS) магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS 1H с подавлением сигнала воды; и выполнение контрольной подпоследовательности MR (SRef), чтобы получить эталонные данные MR. Контрольная подпоследовательность MR выполняется после подпоследовательности MRS. Коррекция фазы и B0 в данных MRS 1H с подавлением сигнала воды выполняется с использованием эталонных данных MR, чтобы сформировать скорректированные данные MRS. Возбуждающий импульс (γ) контрольной подпоследовательности MR имеет угол наклона вектора меньше либо равный 5°, а предпочтительнее имеет угол наклона вектора меньше либо равный 3°. В некоторых вариантах осуществления последовательность MR имеет общее время повторения (TR) 2000 мс или меньше. Технический результат: обеспечение возможности быстрого получения результатов измерений при высокой точности. 3 н. и 12 з.п. ф-лы, 5 ил.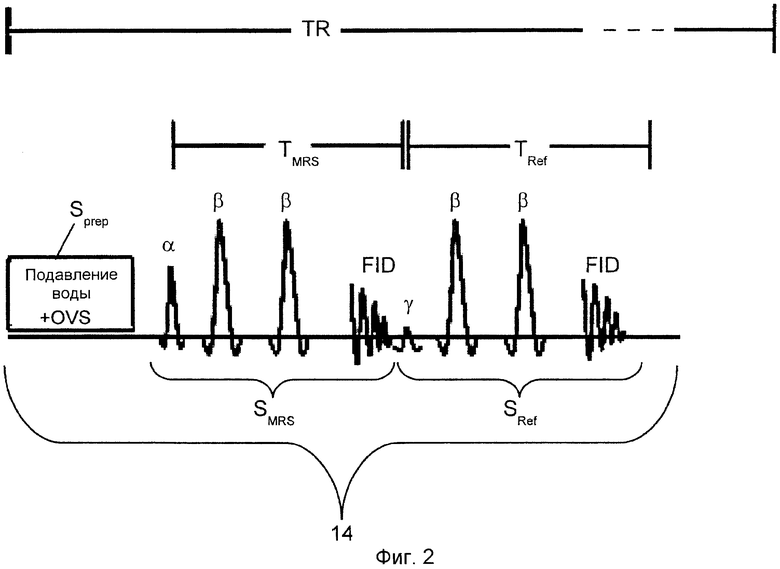
1. Способ магнитно-резонансной спектроскопии, содержащий этапы, на которых:
выполняют последовательность (14) магнитного резонанса (MR), включающую в себя этапы, на которых:
применяют подготовительную подпоследовательность MR (Sprep), обеспечивающую подавление сигнала воды,
выполняют подпоследовательность (SMRS) магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS 1Н с подавлением сигнала воды, и
выполняют контрольную подпоследовательность MR (SRef) после подпоследовательности MRS, чтобы получить эталонные данные MR, в которых возбуждающий импульс (γ) для контрольной подпоследовательности MR имеет угол наклона вектора в 5° или меньше; и
выполняют коррекцию фазы и В0 в данных MRS 1Н с подавлением сигнала воды с использованием эталонных данных MR, чтобы сформировать скорректированные данные MRS.
2. Способ по п. 1, в котором последовательность MR (14) выполняется с временем повторения (TR), меньше либо равным 2000 мс.
3. Способ по п. 1, в котором последовательность MR (14) выполняется с временем повторения (TR) меньше либо равным 1500 мс.
4. Способ по любому из пп. 1-3, в котором сочетание подпоследовательности MRS (SMRS) и контрольной подпоследовательности MR (SRef) выполняется за интервал времени меньше либо равный 1000 мс.
5. Способ по п. 1, в котором контрольная подпоследовательность MR (SRef) выполняется за интервал времени меньше либо равный 500 мс.
6. Способ по п. 1, в котором подпоследовательность MRS (SMRS) выполняется за интервал времени меньше либо равный 500 мс.
7. Способ по п. 1, в котором возбуждающий импульс (γ) для контрольной подпоследовательности MR (SRef) имеет угол наклона вектора 3° или меньше.
8. Способ по п. 1, в котором никакая временная задержка не вносится между окончанием подпоследовательности MRS (SMRS) и возбуждающим импульсом (γ) контрольной подпоследовательности MR (SRef).
9. Способ по п. 1, в котором последовательность MR (14) включает в себя импульсы градиентов магнитного поля пространственного кодирования для формирования данных MRS в виде данных магнитно-резонансной спектроскопической визуализации (MRSI), и способ дополнительно включает в себя этап, на котором отображают скорректированные данные MRS на устройстве отображения (44) в виде изображения MRSI.
10. Способ по п. 1, дополнительно включающий в себя этап, на котором отображают скорректированные данные MRS на устройстве отображения (44) в виде спектра MRS.
11. Устройство для магнитно-резонансной спектроскопии, содержащее:
контроллер (12) магнитного резонанса (MR), сконфигурированный для побуждения сканера MR (10) выполнить последовательность MR (14), включающую в себя:
применение подготовительной подпоследовательности MR (Sprep), обеспечивающей подавление сигнала воды,
выполнение подпоследовательности (SMRS) магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS с подавлением сигнала воды, и
выполнение контрольной подпоследовательности MR (SRef) после подпоследовательности MRS, чтобы получить эталонные данные MR;
причем последовательность MR (14) имеет время повторения (TR) 2000 мс или меньше.
12. Устройство по п. 11, в котором возбуждающий импульс (γ) контрольной подпоследовательности MR (SRef) имеет угол наклона вектора 5° или меньше.
13. Устройство по п. 11, в котором возбуждающий импульс (γ) контрольной подпоследовательности MR (SRef) имеет угол наклона вектора 3° или меньше.
14. Устройство по любому из пп. 11-13, дополнительно содержащее:
модуль обработки данных MRS (26), сконфигурированный с возможностью выполнения коррекции фазы и В0 у данных MRS с подавлением сигнала воды, используя эталонные данные MR, чтобы сформировать скорректированные данные MRS.
15. Носитель информации, хранящий команды, исполняемые цифровым процессором, чтобы побудить сканер (10) магнитного резонанса (MR) выполнить последовательность MR (14), включающую в себя:
применение подготовительной подпоследовательности MR (Sprep), обеспечивающей подавление сигнала MR из источника преобладающего сигнала,
выполнение подпоследовательности (SMRS) магнитно-резонансной спектроскопии (MRS) после применения подготовительной подпоследовательности MR, чтобы получить данные MRS с подавлением сигнала MR из источника преобладающего сигнала, и
выполнение контрольной подпоследовательности MR (SRef), чтобы получить эталонные данные MR, причем контрольная подпоследовательность MR выполняется после подпоследовательности MRS и пока подготовительная подпоследовательность MR продолжает обеспечивать некоторое подавление сигнала MR из источника преобладающего сигнала, возбуждающий импульс (γ) контрольной подпоследовательности MR имеет угол наклона вектора 5° или меньше.
| US 2010026296A1, 04.02.2010 | |||
| US 2007265520A1, 15.11.2007 | |||
| Способ диагностики функциональной недостаточности печени | 1983 |
|
SU1156647A1 |
| JP 2004073866A1, 11.03.2004 | |||
| СПОСОБ ОЦЕНКИ ОБЪЕМА ЖИРОВОЙ ТКАНИ В ТЕЛЕ ЧЕЛОВЕКА | 2008 |
|
RU2373840C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ АРТЕРИЙ НИЖНИХ КОНЕЧНОСТЕЙ МЕТОДОМ МАГНИТНО-РЕЗОНАНСНОЙ АНГИОГРАФИИ | 2000 |
|
RU2166909C1 |

