ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
По данной заявке испрашивается приоритет согласно 35 U.S.C. §119 на основании заявки на патент США № 13/218,628, поданной 26 августа 2011 г., все содержание которой включено в данное описание путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данный патентный документ относится к системам и методам офтальмологического позиционирования. В частности, этот патентный документ относится к системам и способам для обеспечения системы наведения на основе формирования изображения для позиционирования офтальмологической системы по отношению к глазу пациента на основании анализа положения и ориентации.
УРОВЕНЬ ТЕХНИКИ
Широкое внедрение и применение лазерных хирургических систем в офтальмологии открыло новые перспективы повышения точности и управляемости. Один из подходов к достижению этого высокого уровня управляемости состоит в иммобилизации глаза относительно лазерной хирургической системы. Во многих устройствах иммобилизация осуществляется присоединением интерфейса пациента к объективу лазера с последующим позиционированием его по отношению к глазу, часто посредством вакуумного всасывания. В других системах часть интерфейса пациента позиционируется по отношению к глазу, другая часть – по отношению к цели, и затем хирург мягко совмещает и фиксирует две части относительно друг друга.
Одним из факторов, определяющих точность и пригодность этих систем, является позиционирование интерфейса пациента по отношению к глазу в центральной позиции. Такое позиционирование по центру или центрирование позволяет совмещать оптическую ось объектива лазерной системы и оптическую ось глаза. Поскольку лазерный пучок обычно направляется и управляется относительно оптической оси объектива, совмещение оптической оси глаза с оптической осью объектива путем позиционирования по центру позволяет управлять лазерным пучком в глазу с высокой точностью.
Однако по многим причинам позиционирование по центру по отношению к видимым структурам глаза, например зрачку или лимбу, часто представляет проблему. Пациенты иногда двигают глазами в ходе позиционирования, даже непроизвольно. Кроме того, даже если интерфейс пациента центрируется с глазом в начале процедуры позиционирования, глазное яблоко может поворачиваться в одну сторону в ходе позиционирования вследствие давления, прилагаемого интерфейсом пациента после установления контакта с глазом. Кроме того, форма структур глаза может быть до некоторой степени эллипсоидальной или неправильной. Кроме того, лимб и зрачок часто не являются концентрическими. В этих типичных случаях центр глаза не является строго определенным: например, центрирование интерфейса пациента со зрачком может не приводить к его центрированию относительно лимба.
Дополнительные сложности возникают в системах, предназначенных для хирургии катаракты. Целью хирургии катаракты является хрусталик, имеющий ограниченную видимость, поскольку он является внутренней структурой глаза и по существу прозрачен. Кроме того, хрусталик обычно не концентричен видимым структурам глаза, включая лимб и зрачок. Все это затрудняет центрирование интерфейса пациента с хрусталиком ограниченной видимости. Если, напротив, центрировать интерфейс пациента с видимым лимбом, это также может привести к рассогласованию позиционирования интерфейса с внутренним хрусталиком ограниченной видимости. В этом случае, когда в ходе хирургии катаракты лазерный пучок устанавливается относительно центра интерфейса пациента, выровненного и позиционированного по отношению к лимбу, лазерный пучок может быть неправильно ориентирован относительно центра хрусталика, намеченной цели хирургии катаракты.
Децентровка хрусталика может объясняться несколькими причинами. Во многих глазах хрусталик анатомически смещен относительно центра. Кроме того, давление при позиционировании также может толкать и наклонять хрусталик в одну сторону, поскольку хрусталик удерживается на месте только мягкими цилиарными мышцами.
Некоторые системы компенсируют децентровку хрусталика, пытаясь совместить интерфейс пациента с хрусталиком, а не с видимым зрачком. Однако прозрачность хрусталика препятствует хирургу в точном определении положения и наклона хрусталика и, соответственно, в выравнивании интерфейса пациента.
Некоторые системы применяют систему формирования изображения для формирования изображения хрусталика для содействия в выравнивании интерфейса пациента. Однако использование таких систем формирования изображения также может быть сопряжено с проблемами.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Систему формирования видеоизображения или видеомикроскоп можно использовать для содействия в выравнивании интерфейса пациента и таким образом для позиционирования. Однако видеомикроскоп, в основном, используется для формирования изображения видимых структур глаза, например лимба и зрачка, и может быть неспособен формировать изображение и оценивать ориентацию хрусталика, внутренней и по существу прозрачной структуры глаза. Использование системы оптической когерентной томографии (OCT) вместо видеомикроскопа имеет преимущество в том, что OCT-системы формирования изображения могут эффективно формировать изображение хрусталика. Однако процесс формирования изображения методом OCT обычно является медленным и не обеспечивает изображения достаточно быстро, чтобы быть полезным для процесса позиционирования.
Один подход к ускорению процесса формирования изображения методом OCT предусматривает формирование изображения целевого хрусталика лишь выборочно, что позволяет ускоренно создавать изображения. Примеры включают в себя сканирующие системы OCT, которые изображают хрусталик только вдоль одномерных линий или окружностей сканирования, а не в двух измерениях, поперечных оптической оси. Эти сканирующие OCT-системы формирования изображения способны быстрее формировать изображения, поскольку они захватывают только ограниченную или выбранную информацию формирования изображения. Однако получение только ограниченной информации формирования изображения может приводить к проблемам другого рода при попытке центрировать интерфейс пациента с невыровненным хрусталиком глаза, как описано ниже.
Хрусталик может быть не выровнен относительно оптической оси системы формирования изображения и таким образом интерфейсов пациента (PI) по разным причинам. Оптическая ось хрусталика может наклоняться относительно оптической оси PI, и центр хрусталика может сдвигаться или смещаться относительно оптической оси PI. Хирург может анализировать OCT-изображение и производить компенсирующие действия для компенсации сдвига хрусталика и наклона хрусталика для совмещения интерфейса пациента с хрусталиком.
Для осуществления этих двух типов компенсирующих действий хирургу необходимо идентифицировать сдвиг и наклон по отдельности из OCT-изображения хрусталика. Однако ограниченная информация формирования изображения, предоставляемая более быстродействующими сканирующими системами OCT, обычно свертывает информацию о наклоне и сдвиге. Поэтому при использовании сканирующей OCT-системы формирования изображения хирург начинает процесс позиционирования с попытки умственного анализа изображения, полученного посредством OCT со сканированием, для разделения наклона и сдвига хрусталика.
В попытке этого разделения хирург может определить, что хрусталик сдвинут на определенное расстояние в определенном направлении от оптической оси PI и наклонен в определенном направлении под определенным углом относительно нее.
Когда сдвиг отделен от наклона, хирург может определить направление и величину сдвигокомпенсирующего перемещения гентри лазерной системы и соответственно перемещать гентри.
Затем хирург может компенсировать также определенный наклон хрусталика. Поскольку оптическая ось в большинстве систем формирования изображения или лазерных систем не может наклоняться, наклонокомпенсирующее действие может включать в себя предписывание пациенту поворачивать оперируемый глаз, поворачивание глазного яблока вручную или регулировку системы света фиксации. Поскольку первая попытка центрирования обычно приводит только к улучшению совмещения или компенсации, эти этапы часто повторяются в итерационном режиме и с изменением порядка или комбинаций.
Если хирургу удалось разделить и определить сдвиг и наклон, то в результате (возможно, итерационном) сдвиго- и наклонокомпенсирующих действий PI достигает хорошего центрирования с хрусталиком. Поэтому хирург может продолжать и позиционировать центрированный и выровненный PI с глазом.
Однако в таких системах «необработанных изображений», которые не обрабатывают изображения и таким образом не обеспечивают наведения для хирурга, возникает ряд проблем. Эти проблемы, в частности, связаны с тем, что хирургу может быть трудно осуществлять ментальное разделение свернутых наклона и сдвига в изображении, полученном посредством OCT со сканированием, без вычислительной обработки и наведения в условиях ограниченного времени операции. Это потенциально может приводить к позиционированию PI по отношению к глазу в нецентрированной позиции. Хуже того, хирург может даже инициировать регулировки, которые увеличивают рассогласования вместо того, чтобы уменьшать их, из-за чего итерационный процесс совмещения может не сходиться или сходиться только после нескольких неправильных шагов.
Дополнительная неэффективность систем «двух необработанных изображений» состоит в том, что OCT-изображение хрусталика обычно представляется на специальном дисплее или экране OCT, отдельном от дисплея видеомикроскопа. Поэтому в системах, где хирург использует для процесса совмещения как OCT, так и видеоизображение, хирургу нужно анализировать изображение хрусталика на дисплее OCT и видимые структуры глаза на отдельном видеодисплее. Изображения на этих двух дисплеях обычно формируются с разных точек наблюдения с разным увеличением и, возможно, с использованием разных соглашений по эталонам. Поэтому разделение сдвига и наклона требует сложного параллельного анализа между двумя совершенно разными изображениями. Необходимость в обработке и преобразовании двух типов неконгруэнтной информации формирования изображения в прямом и обратном направлении может привести хирурга в замешательство, возможно уменьшая эффективность процесса центрирования и позиционирования.
Для решения этих проблем в данном патентном документе раскрыты системы позиционирования на основе формирования изображения, которые разделяют наклон и сдвиг и представляют их хирургу интуитивно понятным образом. В некоторых реализациях офтальмологическая система позиционирования может включать в себя офтальмологическую систему формирования изображения, содержащую процессор изображений, и систему наведения, соединенную с офтальмологической системой формирования изображения, причем офтальмологическая система формирования изображения выполнена с возможностью формирования изображения участка глаза пациента, процессор изображений выполнен с возможностью определения положения и ориентации изображаемого участка глаза путем анализа изображения, и система наведения выполнена с возможностью наведения в офтальмологическом позиционировании на основании определенных положения и ориентации.
Изображаемым участком глаза может быть хрусталик или другая структура, признак или ориентир переднего сегмента глаза. Положение и ориентация можно определять относительно различных эталонов, например оптической оси системы формирования изображения, внутреннего эталонного зеркала системы формирования изображения, внутренней поверхности оптического элемента хирургической системы или глазной структуры или слоя переднего сегмента.
В других реализациях офтальмологическая система позиционирования может включать в себя офтальмологическую систему формирования изображения, содержащую процессор изображений, причем офтальмологическая система формирования изображения включает в себя офтальмологическую систему формирования глубинного изображения, выполненную с возможностью формирования изображения внутренней структуры глаза для глаза пациента, и систему формирования видеоизображения, выполненную с возможностью формирования видеоизображения фронтальной структуры глаза для глаза, причем изображаемый участок глаза содержит внутреннюю структуру глаза и фронтальную структуру глаза, и процессор изображений включает в себя процессор глубинных изображений, выполненный с возможностью определения ориентации внутренней структуры глаза из изображения внутренней структуры глаза, и процессор видеоизображений, выполненный с возможностью определения положения фронтальной структуры глаза на основании изображения фронтальной структуры глаза.
В некоторых реализациях способ наведения в офтальмологическом позиционировании может включать в себя формирование изображения участка глаза пациента с помощью офтальмологической системы формирования изображения, определение положения и ориентации изображаемого участка глаза путем анализа изображения с помощью процессора изображений, и наведение при офтальмологическом позиционировании на основании определенных положения и ориентации с помощью системы наведения.
В некоторых реализациях офтальмологическая система позиционирования может включать в себя офтальмологическую систему формирования изображения, включающую в себя процессор изображений, причем офтальмологическая система формирования изображения выполнена с возможностью формирования изображения участка глаза пациента, и процессор изображений выполнен с возможностью обработки изображения для распознавания глазной структуры глаза и для определения рассогласования изображаемого участка глаза относительно эталона; и систему наведения, соединенную с офтальмологической системой формирования изображения, выполненную с возможностью наведения в офтальмологическом позиционировании на основании определенного рассогласования.
В некоторых вариантах осуществления офтальмологическая система наведения может включать в себя офтальмологическую систему формирования изображения, содержащую процессор изображений, причем офтальмологическая система формирования изображения выполнена с возможностью формирования изображения участка глаза пациента, и процессор изображений выполнен с возможностью обработки изображения для распознавания глазной структуры глаза и для определения позиции изображаемого участка глаза относительно эталона; и систему наведения, соединенную с офтальмологической системой формирования изображения, выполненную с возможностью наведения в офтальмологической ультразвуковой хирургической операции на основании определенной позиции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1A-B иллюстрируют различные рассогласования глаза.
Фиг. 1C иллюстрирует два дисплея системы «двух необработанных изображений».
Фиг. 2 иллюстрирует систему позиционирования на основе формирования изображения.
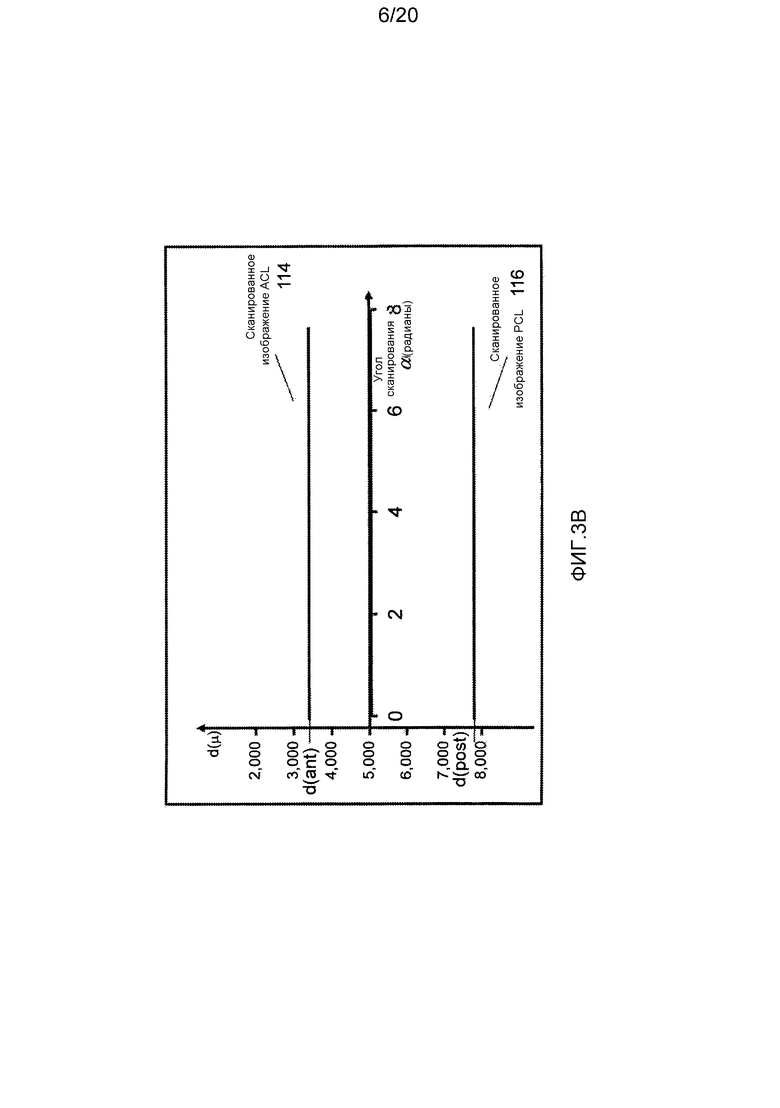
Фиг. 3A-B иллюстрируют изображение, полученное сканированием и OCT, полностью выровненного хрусталика.
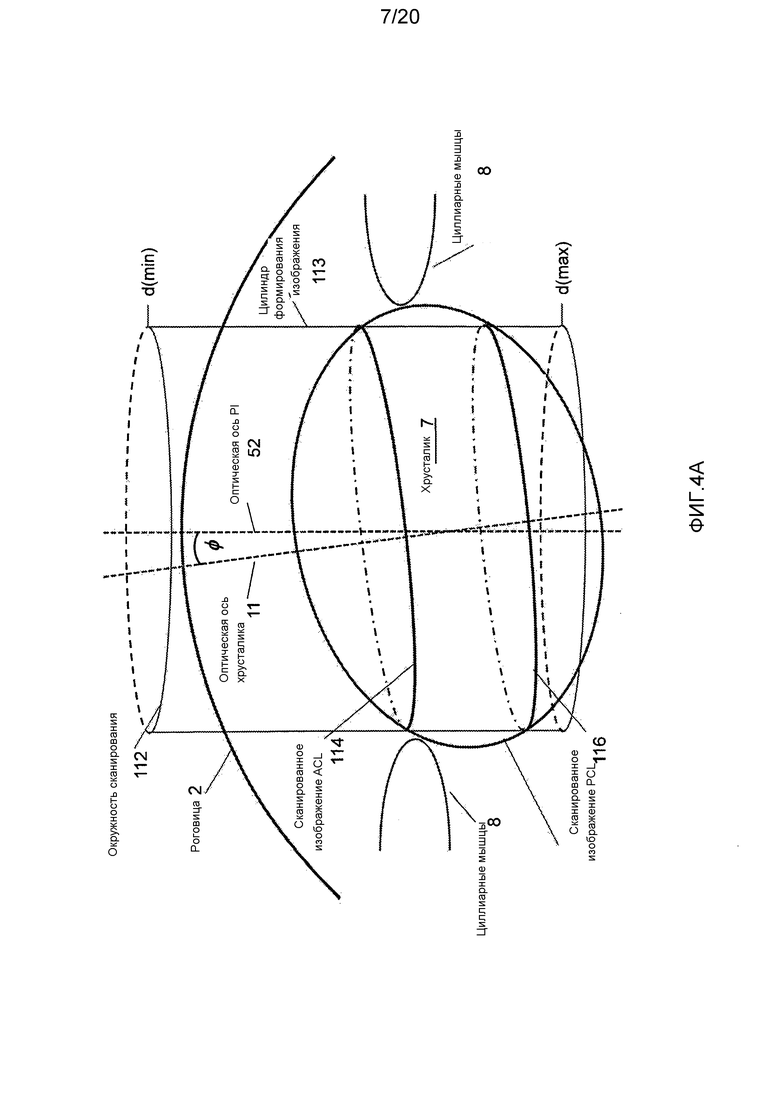
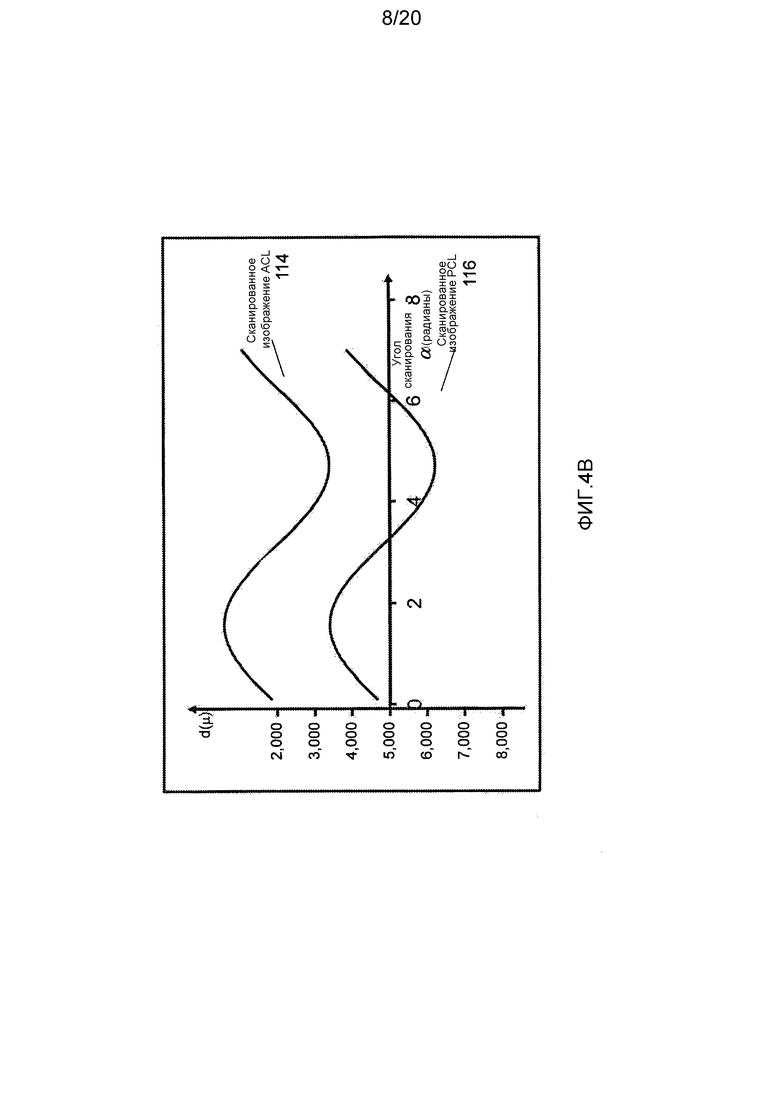
Фиг. 4A-B иллюстрируют изображение, полученное сканированием и OCT, наклонного хрусталика.
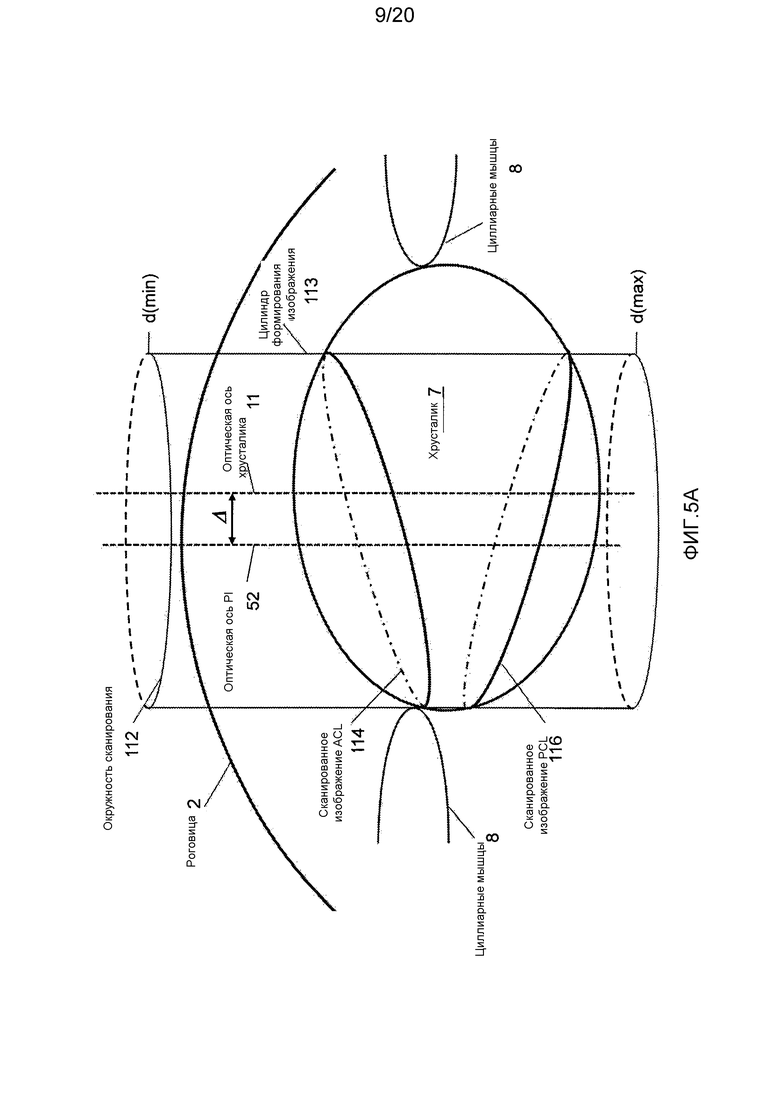
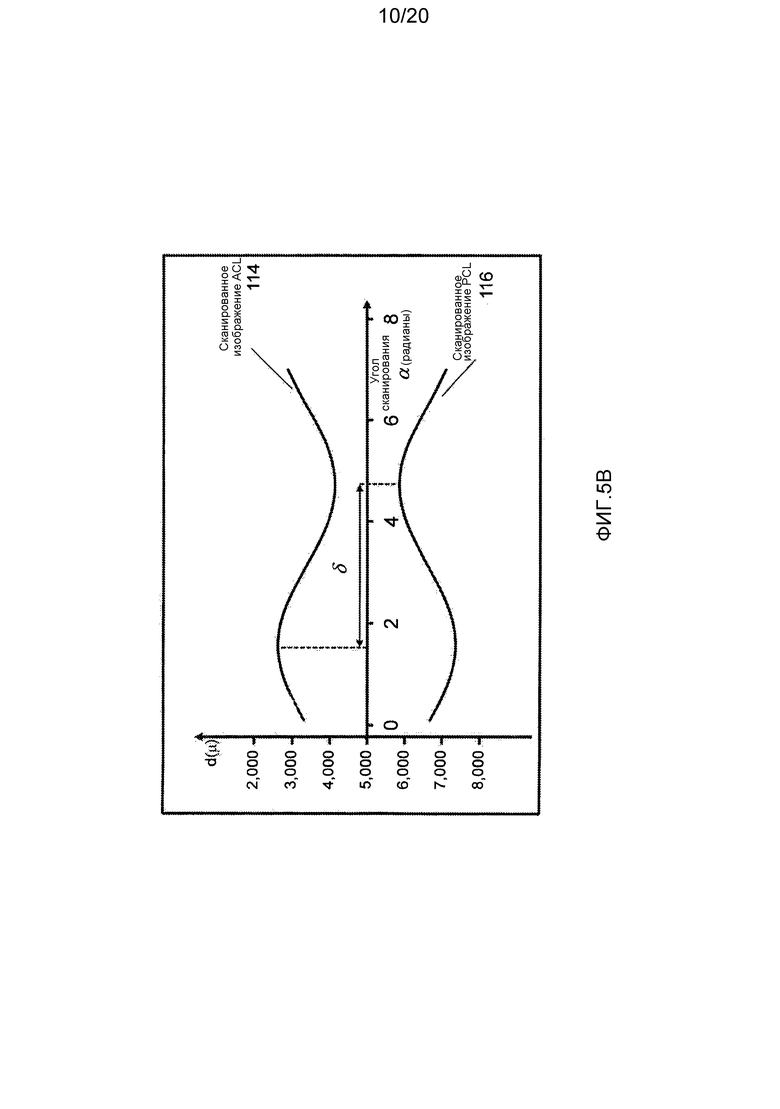
Фиг. 5A-B иллюстрируют изображение, полученное сканированием и OCT, сдвинутого хрусталика.
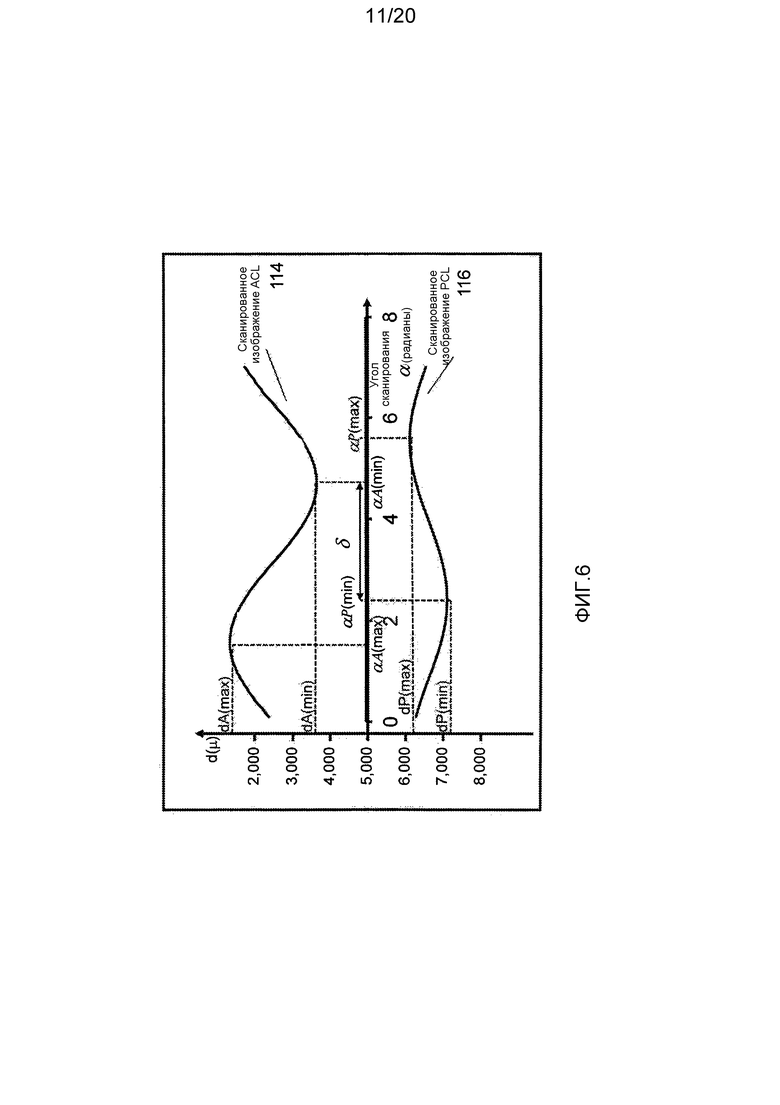
Фиг. 6 иллюстрирует изображение, полученное посредством OCT со сканированием, хрусталика как наклонного, так и сдвинутого.
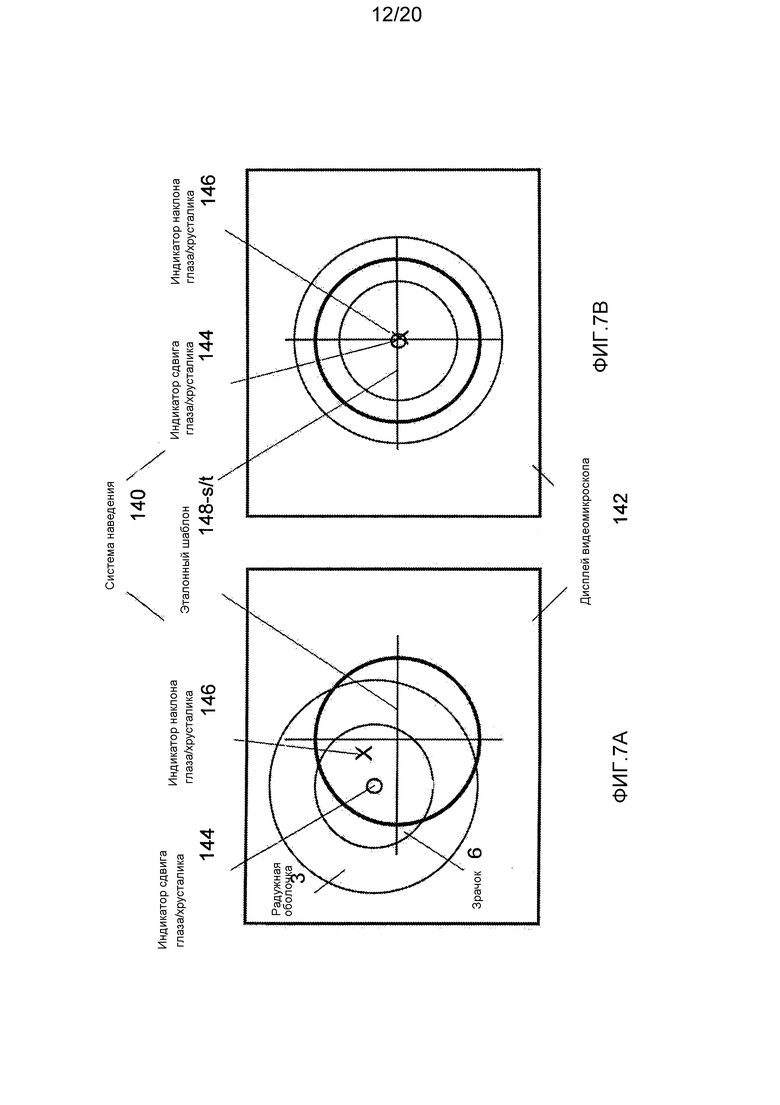
Фиг. 7A-B иллюстрируют отображение с помощью видеомикроскопа индикаторов сдвига и наклона.
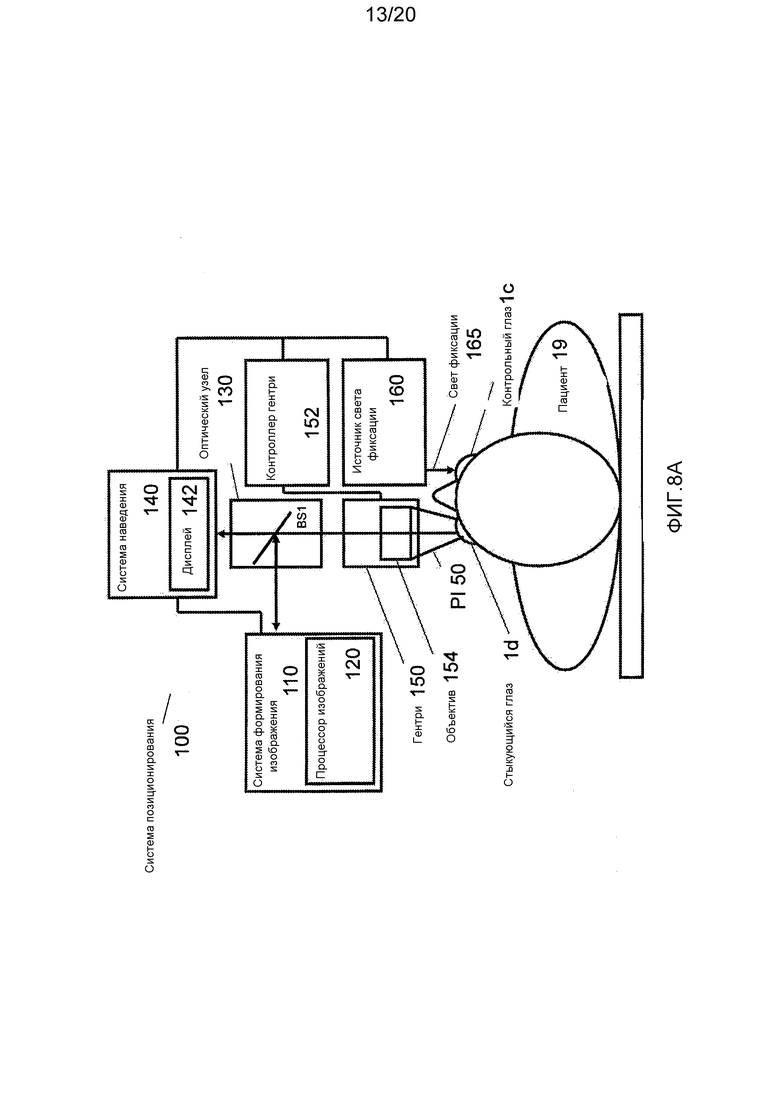
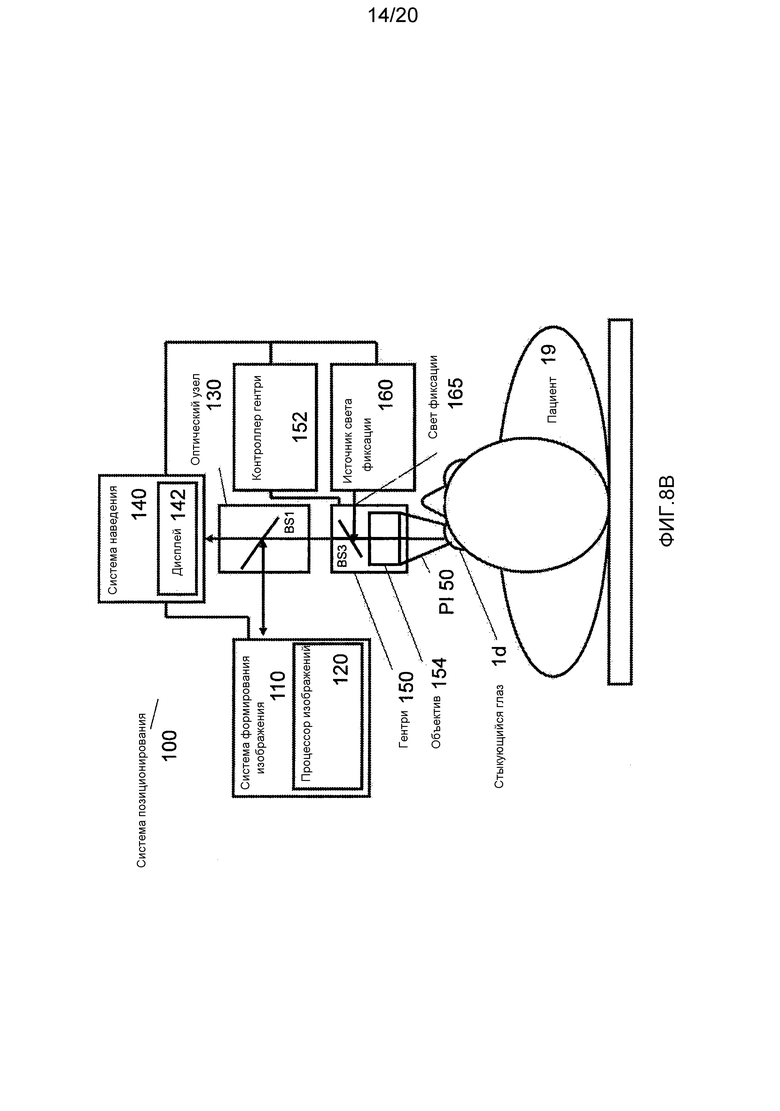
Фиг. 8A-B иллюстрируют реализации системы наведения с гентри и светом фиксации.
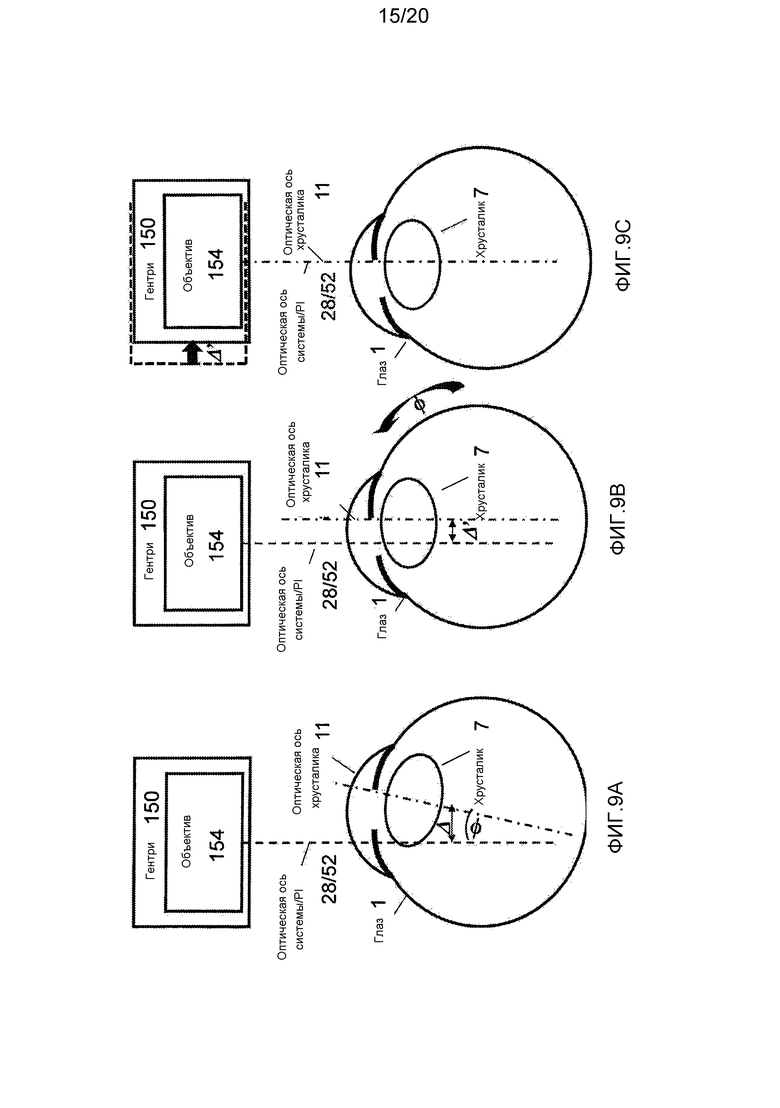
Фиг. 9A-C иллюстрируют этапы компенсации рассогласования сдвига и наклона.
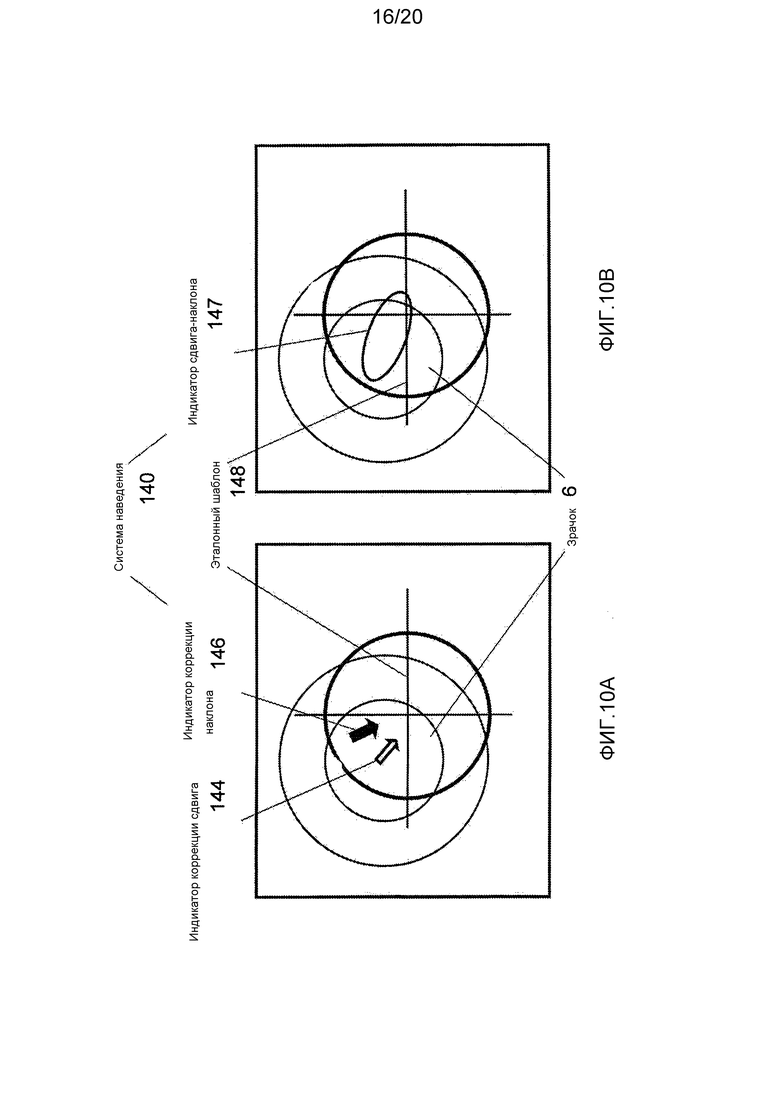
Фиг. 10A-B иллюстрируют две дополнительных реализации дисплея видеомикроскопа.
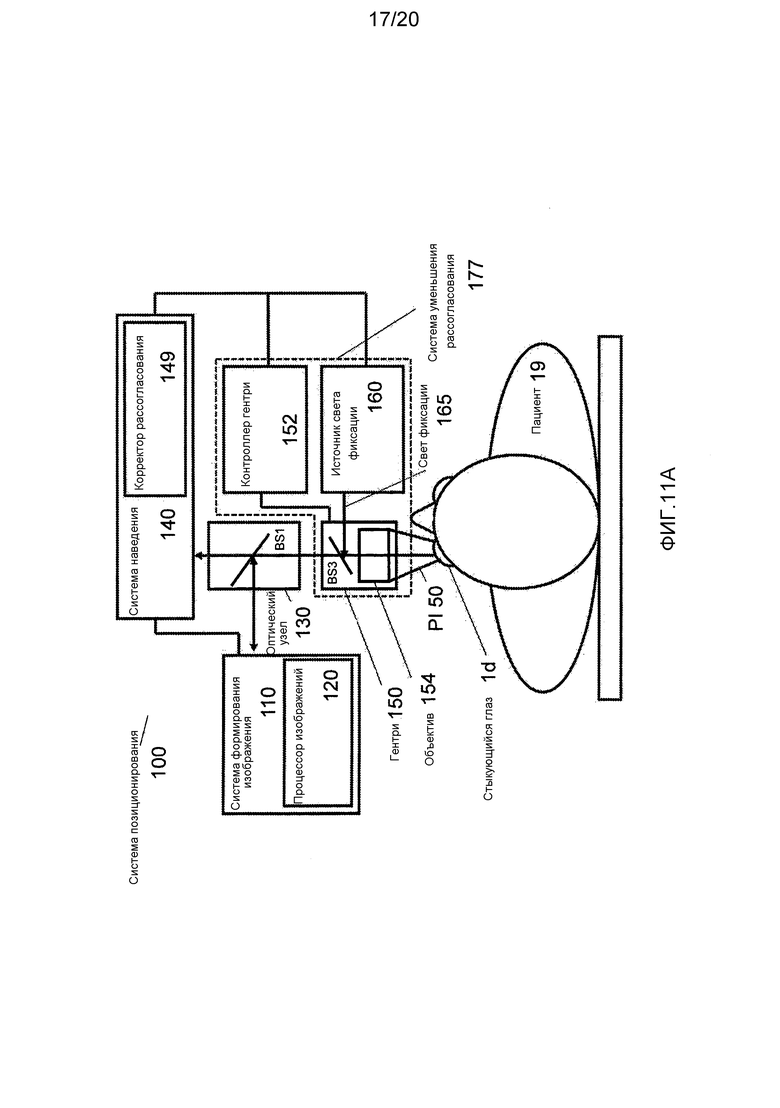
Фиг. 11A-B иллюстрируют варианты осуществления системы позиционирования.
Фиг. 12 иллюстрирует способ эксплуатации системы позиционирования на основе формирования изображения.
Фиг. 13 иллюстрирует другой способ эксплуатации системы позиционирования на основе формирования изображения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Реализации и варианты осуществления в этом патентном документе обеспечивают офтальмологическую систему позиционирования, которая включает в себя систему формирования изображения, способную разделять и идентифицировать сдвиг и наклон глаза пациента, и могут представлять информацию сдвига и наклона в интегральной, конгруэнтной манере во избежание приведения хирурга в замешательство. Такая система позиционирования может быть полезна для повышения точности и простоты позиционирования интерфейса пациента офтальмологической хирургической системы по отношению к глазу, например системы лазерной хирургии катаракты.
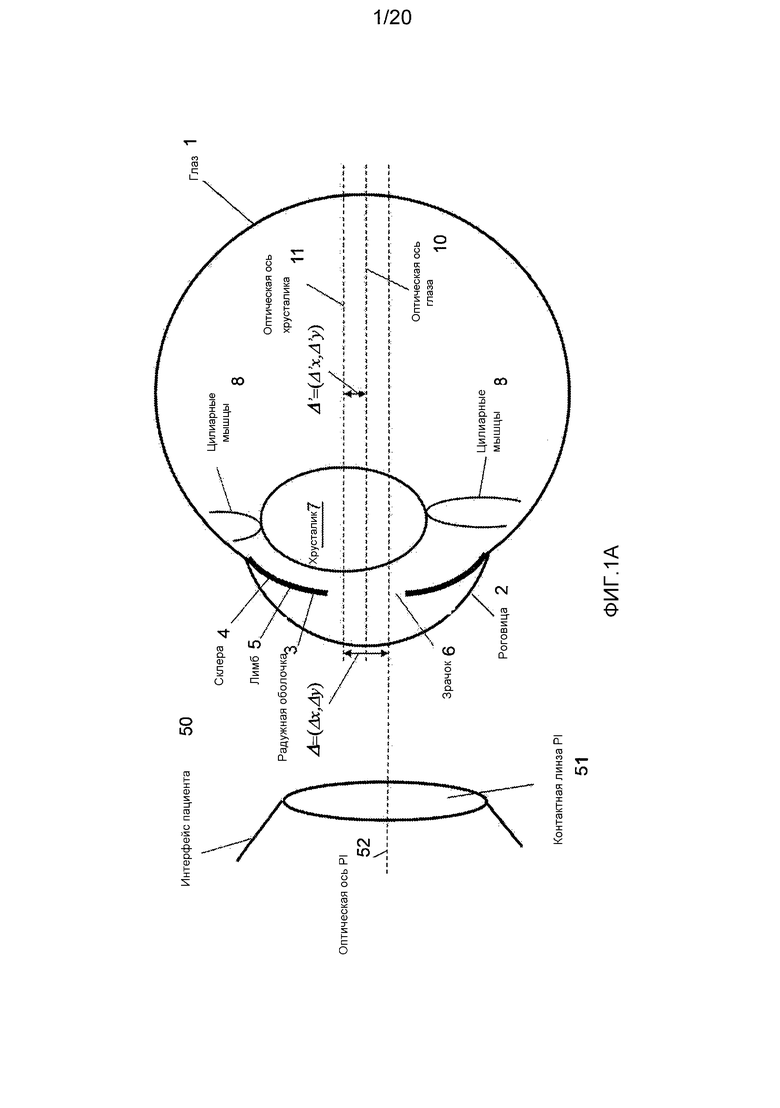
Фиг. 1A-B иллюстрируют различные рассогласования интерфейса 50 пациента (PI) и его контактной линзы 51 PI относительно глаза 1. Общеизвестные структуры в глазу 1 включают в себя роговицу 2, радужную оболочку 3, склеру 4, отделенную от радужной оболочки 3 лимбом 5. Отверстие радужной оболочки 3 образует зрачок 6. Хрусталик 7 является внутренней структурой глаза 1, удерживаемой на месте мягкими цилиарными мышцами 8.
Фиг. 1A показывает, что, как описано выше, хрусталик 7 может сдвигаться от оптической оси 10 глаза 1 по различным причинам, в результате чего оптическая ось 11 хрусталика 7 смещается от оптической оси 10 глаза на поперечный вектор Δ'=(Δ'x, Δ'y) и таким образом от оптической оси 52 PI для PI 50 на поперечный вектор Δ=(Δx, Δy). Для простоты эти векторы поперечного смещения или сдвига будем обозначать просто Δ' и Δ.
Фиг. 1A иллюстрирует одну из проблем наведения системой позиционирования традиционными способами. Даже если хирург совмещает и центрирует интерфейс 50 пациента с оптической осью 10 глаза, определяемой видимыми структурами глаза 1, например зрачком 6, оптическая ось 11 хрусталика труднонаблюдаемого внутреннего хрусталика 7 может оставаться сдвинутой от оптической оси 52 PI интерфейса 50 пациента.
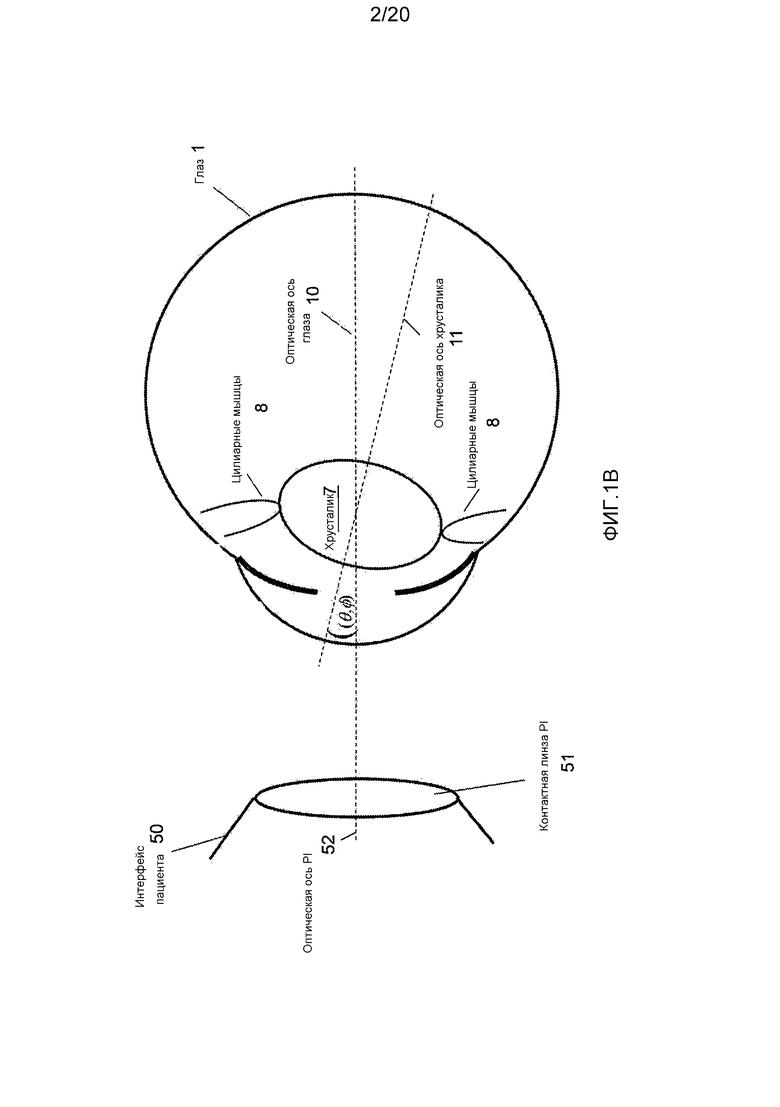
Фиг. 1B иллюстрирует другую форму рассогласования хрусталика 7 и интерфейса 50 пациента. Даже если центр хрусталика 7 лежит на оптической оси 10 глаза и даже если оптическая ось 10 глаза совпадает с оптической осью 52 PI, оптическая ось 11 хрусталика может все же оставаться наклонной относительно оптической оси 52 PI. В общем случае этот наклон можно описать углами Эйлера φ=(θ, φ), которые можно совместно обозначать как угол φ наклона.
Фиг. 1C показывает, как невыровненный или децентрованный глаз 1 может выглядеть на видеодисплее 65 видеомикроскопа 60. Такие видеомикроскопы 60 часто отображают прицельный шаблон 68, чтобы наводить действия хирурга при совмещении или центрировании PI 50 с глазом 1.
Некоторые системы «двух необработанных изображений» могут обеспечивать второе изображение, чтобы наводить действия хирурга в позиционировании PI 50: система 70 формирования изображения может обеспечивать вид в поперечном сечении или сканировании глаза 1, показанный на отдельном дисплее 75 формирования изображения. Вид в поперечном сечении может демонстрировать роговицу 2 и хрусталик 7, отделенный передней водной камерой 12. Хрусталик 7 может быть окружен передним капсулярным слоем 14 и задним капсулярным слоем 16. При выполнении офтальмологических операций пациентам часто дают мышечные релаксанты, которые расслабляют радужную оболочку 3, таким образом увеличивая зрачок 6. По меньшей мере, по этой причине, расширенный зрачок 6 часто даже не появляется на изображениях в поперечном сечении или сканировании.
Как описано выше, предполагается, что хирург, работая с такими системами «двух необработанных изображений», умственно анализирует изображение в поперечном сечении на дисплее 75 в сочетании с видеоизображением видеодисплея 65, разделяет наклон и сдвиг хрусталика 7 и затем осуществляет компенсирующие действия, контролируя их на дисплее 65 видеомикроскопа 60. Однако неоднократный переход в прямом и обратном направлении между двумя различными типами изображений и перенос информации изображения, соответственно, без вычислительной обработки и наведения могут быть весьма затруднительными для хирурга и занимать много времени.
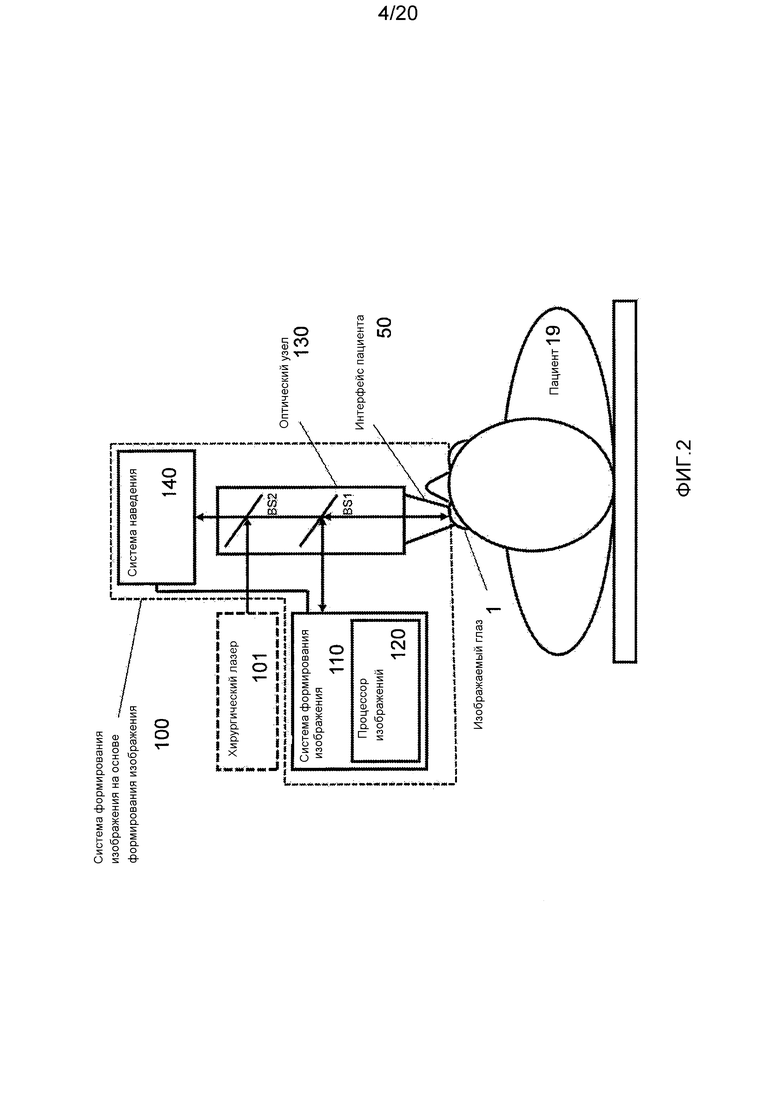
Фиг. 2 иллюстрирует офтальмологическую систему 100 позиционирования на основе формирования изображения, которая может способствовать упрощенному и более эффективному позиционированию на основе формирования изображения. Офтальмологическая система 100 позиционирования может включать в себя офтальмологическую систему 110 формирования изображения, которая может включать в себя процессор 120 изображений, причем офтальмологическая система 110 формирования изображения может быть выполнена с возможностью формирования изображения участка глаза 1 пациента 19. Формирование изображения может осуществляться по-разному. Например, пучок формирования изображения может формироваться системой 110 формирования изображения, после чего поступать в оптический узел 130 системы 100 позиционирования через светоделитель BS1 и направляться в глаз 1. Возвращаемый пучок формирования изображения, возвращаемый из глаза 1, может перенаправляться или отклоняться тем же светоделителем BS1 в систему 110 формирования изображения для формирования изображения глаза 1.
Процессор 120 изображений может быть выполнен с возможностью определения положения и ориентации изображаемого участка глаза путем анализа изображения, формируемого из возвращаемого пучка формирования изображения. Положение можно выразить в отношении сдвига Δ относительно эталона, например оптической оси 52 PI, и ориентацию можно выразить в отношении наклона φ относительно оптической оси 52 PI.
Изображаемый участок может включать в себя части внутренней структуры глаза и части его фронтальных или видимых структур. Например, фиг. 1C иллюстрирует случай, когда изображаемый участок глаза включает в себя участок роговицы 2, участок переднего капсулярного слоя 14 и участок заднего капсулярного слоя 16. В других реализациях изображаемый участок глаза может, в том числе, включать в себя капсулярный слой хрусталика, целевую область хрусталика, хрусталик 7, уплотненное ядро хрусталика 7, лимб 5, радужную оболочку 3, зрачок 6, роговичный эндотелий, роговичный эпителий или глазную структуру в переднем сегменте глаза 1.
Система 100 позиционирования также может включать в себя систему 140 наведения, соединенную с офтальмологической системой 110 формирования изображения, выполненную с возможностью наведения при офтальмологическом позиционировании на основании определенных положения и ориентации. Система 140 наведения может включать в себя видеодисплей видеомикроскопа или дисплей системы 110 формирования изображения. Система 140 наведения может быть выполнена с возможностью наведения в офтальмологическом позиционировании путем отображения изображений и информации наведения хирургу-офтальмологу.
Система 100 позиционирования может входить в состав более крупной офтальмологической системы, которая может осуществлять и другие функции. Например, система 100 позиционирования может быть объединена с хирургическим лазером 101, причем хирургический лазерный пучок хирургического лазера 101 может поступать в оптический узел 130 на светоделителе BS2 для направления в глаз 1. Хирургический лазер 101 может осуществлять хирургию катаракты, например фрагментацию хрусталика 7 или разрушение хрусталика 7. Он также может осуществлять операции на роговице, например создание лимбальных ослабляющих разрезов или создание разрезов доступа для ультразвуковой факоиглы. Хирургический лазер 101 также может осуществлять операции, связанные с LASIK, включающие в себя нарезание насечек в роговице 2.
Система 100 позиционирования также может входить в состав более крупной или более сложной системы формирования изображения, например хирургического микроскопа, который, однако, не осуществляет хирургическую операцию. Вместо этого он может осуществлять формирование изображения участка переднего сегмента глаза 1. Наконец, система 100 позиционирования может входить в состав различных диагностических систем, например, в форме системы совмещения, которая не обязательно предусматривает прямой физический контакт с глазом.
Офтальмологическая система 110 формирования изображения может включать в себя разнообразные системы формирования изображения, например систему оптической когерентной томографии (OCT) во временной области, систему OCT в частотной области, система OCT на основе спектрометра, ультразвуковую систему, систему на основе микроскопа, электронную систему формирования изображения, цифровую систему формирования изображения, систему формирования изображения Пуркинье, систему структурного освещения, систему щелевой лампы или систему формирования изображения Шаймпфлюга. Возможные существенные различия между этими системами формирования изображения будут рассмотрены ниже.
Офтальмологическая система 110 формирования изображения может включать в себя сканирующую систему формирования изображения для осуществления сканирования путем направления пучка формирования изображения в точки по меньшей мере одной из дуги, линии, петли, окружности, эллипса, звезды, линии с повторяющимися признаками, двухмерного шаблона и двухмерной сетки. Система 110 формирования изображения может формировать изображение изображаемого участка глаза в диапазоне глубины в точках сканирования.
Реализации офтальмологических систем позиционирования на основе формирования изображения, которые могут быть с достижением преимущества объединены с описанной здесь офтальмологической системой 100 позиционирования на основе формирования изображения, были описаны в патентном документе того же заявителя: “Image-Guided Docking for Ophthalmic Surgical Systems” от A. Juhasz и K. Vardin, заявка на патент № US 12/815,179, включенном в настоящее описание в полном объеме путем ссылки.
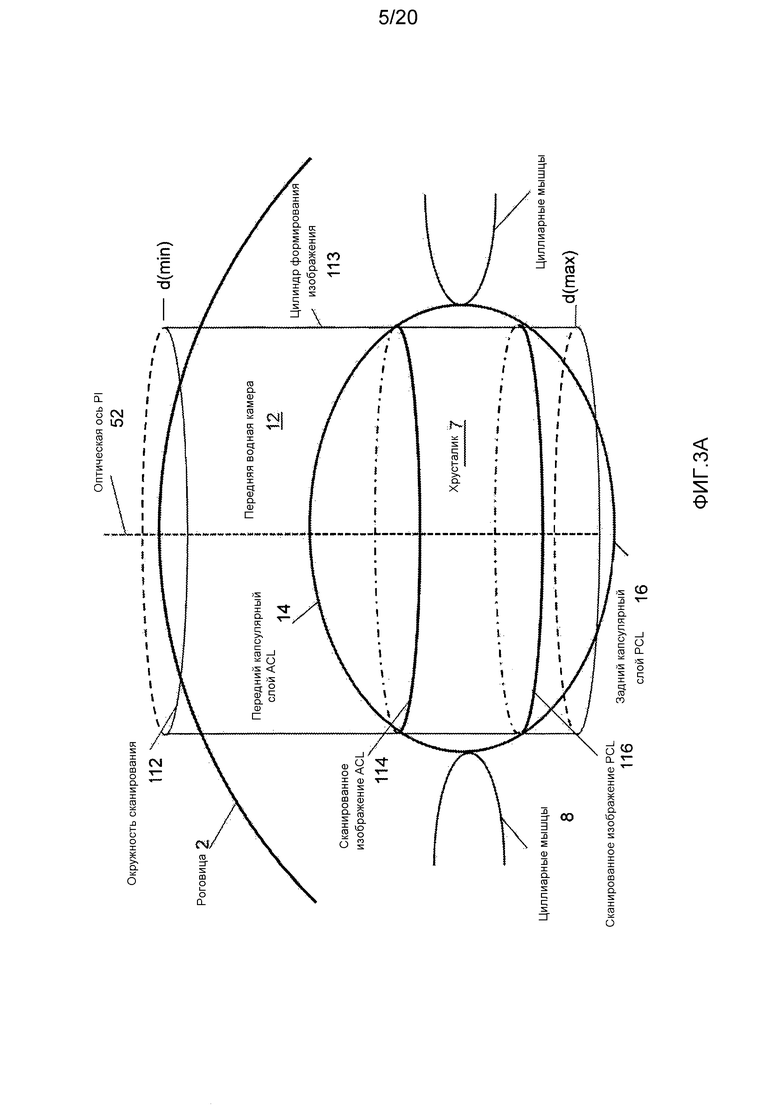
Фиг. 3A иллюстрирует реализацию системы 110 формирования изображения. Система 110 формирования изображения может включать в себя, например, систему OCT на основе спектрометра (SB-OCT), направляющую пучок формирования изображения в точки (x, y) окружности или петли 112 сканирования, обычно ориентированной поперек оптической оси 52 PI. Когда лазерный пучок формирования изображения возвращается из конкретной точки (x, y) окружности 112 сканирования, он несет информацию формирования изображения о глазных структурах, имеющих одни и те же поперечные координаты (x, y) со всех глубин d в диапазоне глубины между минимальной глубиной d(min) и максимальной глубиной d(max) - иногда именуемую A-растром. Заметим, что системы OCT во временной области получают информацию формирования изображения A-растра с разных глубин последовательно, тогда как системы OCT на основе спектрометра получают информацию формирования изображения A-растра со всех глубин одновременно. При этом глубину d можно измерять от разных точек отсчета, включающих в себя эталонное зеркало системы SB-OCT, точку отсчета, внутреннюю по отношению к оптическому узлу 130, дальнюю поверхность контактной линзы 51 PI, контактирующую с роговицей 2, или даже от глазной структуры или ориентира внутри глаза 1. Некоторые офтальмологические системы формирования изображения способны собирать и возвращать информацию формирования изображения из диапазона формирования изображения между минимальной глубиной d(min), которая по существу составляет нуль микрон, 0 мкм, измеренной от контактной линзы 51 PI, захватывая информацию формирования изображения роговицы, до максимальной глубины d(max)=5000 мкм, 7000 мкм или даже 10000 мкм, захватывая информацию формирования изображения, охватывающую большую часть переднего сегмента глаза вплоть до заднего капсулярного слоя 16.
A-растры глаза, сделанные в последовательных точках (x, y) вдоль окружности 112 сканирования, можно объединять в сканированное изображение глаза, иногда именуемое B-растром. B-растр по существу развертывает изображение глаза из цилиндра 113 формирования изображения, определяемого окружностью 112 сканирования и диапазоном формирования изображения d(min)-d(max). Это развернутое изображение можно обозначать или индексировать переменной сканирования: длиной вдоль окружности 112 сканирования или угловой переменной α сканирования, выражаемой, например, в радианах.
Фиг. 3B иллюстрирует изображение или B-растр полностью выровненного и центрированного хрусталика 7, развернутое из цилиндра 113 формирования изображения. Можно видеть, что сканирующий пучок, обнаружил передний капсулярный слой (ACL) 14 на глубине d(ant) вдоль всего кругового сканирования таким образом формирующий сканированное изображение 114 ACL, которое является горизонтальной линией на глубине d=d(ant) около 3,400 мкм, в этом примере вдоль всего диапазона угловой переменной α сканирования 2π радиан. Аналогично, сканированное изображение 116 заднего капсулярного слоя (PCL) на цилиндре 113 формирования изображения является горизонтальной линией на глубине d=d(post) около 7,800 мкм. Для простоты и ясности изображение роговицы 2 на глубине, близкой к d=0 мкм, не показано.
Как упомянуто выше, одна из проблем систем «двух необработанных изображений», показанных на фиг. 1C, состоит в том, что они снабжают хирурга изображением, полученным с помощью видеомикроскопа, которое выглядит иначе, чем изображение в поперечном сечении или изображение, полученное посредством OCT со сканированием, и предлагают хирургу быстро проанализировать эти неконгруэнтные изображения для разделения и определения сдвига и наклона хрусталика 7. Эти задачи весьма сложны и потенциально могут привести хирурга в замешательство, в особенности в условиях ограниченного времени операции.
Реализации системы 100 позиционирования на основе формирования изображения могут ослаблять эту проблему благодаря тому, что офтальмологическая система 110 формирования изображения не только отображает изображение для хирурга для анализа, но, кроме того, система 110 формирования изображения сама осуществляет процесс распознавания изображений на изображении. Процесс распознавания изображений может быть способен распознавать ACL и PCL в зашумленном первичном изображении и формировать соответствующее сканированное изображение 114 ACL и сканированное изображение 116 PCL. Когда сканированные изображения 114 и 116 ACL и PCL сформированы системой 110 формирования изображения, процессор 120 изображений может анализировать сформированные изображения для вычислительного разделения сдвига и наклона хрусталика 7, и система 140 наведения может отображать определенные сдвиг и наклон удобным образом для хирурга, таким образом освобождая хирурга от необходимого до сих пор ментального анализа.
Удобное отображение системой 140 наведения может, например, встраивать информацию сдвига и наклона в изображение, полученное с помощью видеомикроскопа. В других случаях второе изображение может отображаться отдельно, но конгруэнтно с изображением на видеомикроскопе, причем второе изображение может показывать информацию наклона, а изображение, полученное с помощью видеомикроскопа, - информацию сдвига. Второе изображение может отображаться на том же дисплее, что и видеоизображение, но в другой области дисплея, или на отдельном втором дисплее.
Осуществление процесса распознавания изображения с помощью процессора 120 изображений может быть полезно, поскольку в первичном OCT-изображении ACL/PCL 14/16 могут возникать только как области точек изображения, отражающие свет несколько больше, чем соседние области. Однако контуры этих более отражающих областей часто бывают не очень четкими, в особенности, при существенном шуме формирования изображения или при наличии систематического шума, или при наличии дополнительных линий изображения, или если некоторые линии изображения пересекаются, или если в изображении присутствуют артефакты.
Для распознавания капсулярных слоев даже в зашумленном изображении и для определения наклона и сдвига хрусталика в некоторых реализациях процессор 120 изображений может быть выполнен с возможностью анализа сканированных изображений распознанных слоев с использованием геометрической модели хрусталика 7 для определения положения и ориентации хрусталика 7. Например, процессор 120 изображений может пытаться подобрать сферу, эллипсоид или эллиптические кривые к областям повышенного отражения и распознать отражающие области как сканированные изображения капсулярных слоев, если их можно достаточно хорошо аппроксимировать сферой или эллипсоидом геометрической модели. Края областей можно определить, например, как точки, где градиент интенсивности изображения демонстрирует локальный максимум. Также можно реализовать разнообразные аналогичные подходы к распознаванию изображений. Рассогласования и их анализ будут описаны со ссылкой на нижеследующие фигуры.
Фиг. 4A иллюстрирует ситуацию «чистого наклона», когда центр хрусталика 7 находится на оптической оси 52 PI, но оптическая ось 11 хрусталика наклонена относительно оптической оси 52 PI под углом наклона φ.
Фиг. 4B показывает, что в ситуациях рассогласования сканированные изображения капсулярных слоев часто являются синусоидальными линиями как функция угловой переменной сканирования, угла или фазы α. Например, в ситуации «чистого наклона», представленной на фиг. 4A, сканированное изображение 114 ACL и сканированное изображение 116 PCL могут представлять собой синусоидальные линии, которые находятся «в фазе» как функция угловой переменной α сканирования, что следует из того, что их максимумы выровнены по углу α сканирования.
Фиг. 5A иллюстрирует ситуацию «чистого сдвига», когда оптическая ось 11 хрусталика выровнена с оптической осью 52 PI, но центр хрусталика 7 смещен от оптической оси PI на сдвиг Δ.
Фиг. 5B иллюстрирует, что в этой ситуации чистого сдвига сканированное изображение 114 ACL и сканированное изображение 116 PCL по-прежнему могут быть синусоидальными, но они «сдвинуты по фазе» относительно друг друга на фазовый сдвиг δ=π радиан. Этот фазовый сдвиг δ приводит к тому, что максимум сканированного изображения 114 ACL выровнен с минимумом сканированного изображения 116 PCL. Обычно фазовый сдвиг δ может быть связан с углом наклона φ геометрическими соотношениями.
Также следует отметить, что амплитуды изображения или минимальная и максимальная глубины сканированных изображений 114 и 116 ACL и PCL могут быть связаны с углом наклона φ и сдвигом Δ геометрическими соотношениями.
Фиг. 6 иллюстрирует, что в общем случае, когда хрусталик 7 сдвинут и наклонен, сканированные изображения 114/116 ACL/PCL демонстрируют комбинацию изображений чистого наклона и чистого сдвига. Соответственно, сканированное изображение 114 ACL и сканированное изображение 116 PCL можно разделить по общему фазовому сдвигу δ=αA(min)-αP(min). Фазовый сдвиг δ также равен δ=αA(max)-αP(max), будучи измерен после 2π на фиг. 6. Здесь, αA(min) означает угол сканирования, или фазу, α, при котором(ой) сканированное изображение 114 ACL достигает своего минимума dA(min) и таким образом своей самой низкой или самой глубокой глубины. В других отношениях, αP(min), αA(max) и αP(max) задаются аналогично в контексте сканированных изображений 114/116 ACL/PCL.
В более общем случае процессор 120 изображений может быть выполнен не только с возможностью определения экстремумов изображений 114/116 ACL/PCL, но и с возможностью следовать любому количеству процедур для определения передней фазы и передней амплитуды сканированного изображения 114 переднего капсулярного слоя и задней фазы и задней амплитуды сканированного изображения 116 заднего капсулярного слоя, и определения положения и ориентации хрусталика из передней фазы, передней амплитуды, задней фазы и задней амплитуды.
Например, процессор 120 изображений может определить характеристическую переднюю фазу αA сканированного изображения 114 ACL, например αA(min) или αA(max), а также соответствующие характеристические передние амплитуды или глубины dA изображения, например глубины dA(min) или dA(max), соответствующие вышеупомянутым передним фазам αA(min) или αA(max). Кроме того, процессор 120 изображений также может определять характеристическую фазу αP сканированного изображения 116 PCL, например αP(min) или αP(max), а также характеристическую глубину dP изображения, например соответствующие глубины dP(min) или dP(max).
С этими фазами и амплитудами процессор 120 изображений может продолжать и определять неизвестные компоненты (Δx, Δy) вектора Δ сдвига и неизвестные углы Эйлера (θ,φ) угла φ наклона, анализируя различные комбинации вышеупомянутых определенных фаз и глубин или амплитуд:
(Δx, Δy, θ, φ)=F1(αA, dA, αP, dP), (1)
где F1 - функция своих аргументов, которыми могут быть различные комбинации или пары определенных углов сканирования и глубин, соответствующих максимумам или минимумам глубины сканированных изображений 114/116 ACL/PCL.
Как упомянуто выше, анализ могут предусматривать использование модели капсулярных слоев. Например, анализ может исходить из того, что капсулярные слои 14 и 16 можно смоделировать как участки сферы или эллипсоида, и затем переходить к определению параметров сферы или эллипсоида путем аппроксимации изображений 114/116 ACL/PCL сферой или эллипсоидом.
Существует большое количество альтернативных путей осуществления этого анализа. Некоторые методы, которые можно преимущественно реализовать для этого анализа, ранее описаны в патентном документе того же заявителя: “Imaging Surgical Target Tissue by Nonlinear Scanning” от I. Goldshleger и др., заявка на патент № US 12/619,606, включенная в настоящее описание в полном объеме путем ссылки.
Примеры альтернативных анализов включают в себя процессор 120 изображений, определяющий переднюю максимальную глубину dA(max) и переднюю минимальную глубину dA(min) сканированного изображения 114 ACL, и заднюю максимальную глубину dP(max) и заднюю минимальную глубину dP(min) сканированного изображения 116 PCL по переменной α сканирования, и определяющий сдвиг и наклон из этих экстремумов:
(Δx, Δy, θ, φ)=F2(dA(min), dA(max), dP(min), dP(max)), (2)
где F2 - другая функция своих аргументов.
Углы сканирования и глубины можно определять, выбирать и анализировать согласно многим другим критериям. Хотя соответствующие функции Fn(x1, …, xm) (где m может принимать значение 2, 3, 4 или более) и детали анализа могут осуществляться по-разному, общая схема выделения сдвига Δ и наклона φ остается той же самой.
В некоторых реализациях процессор 120 изображений может быть выполнен с возможностью определения фазы и амплитуды только одного из сканированных изображений капсулярного слоя и определения из них положения или сдвига и ориентации или наклона хрусталика 7.
Фиг. 7A-B показывает, что система 140 наведения может включать в себя блок 142 отображения, например дисплей 142 видеомикроскопа. Система 140 наведения может быть соединена с процессору 120 изображений, что позволяет блоку 142 отображения отображать индикатор рассогласования положения или сдвига на основании определенного положения изображаемого участка глаза и индикатор рассогласования ориентации или наклона на основании определенной ориентации изображаемого участка глаза, которые оба определяются с помощью процессора 120 изображений, обрабатывающего изображение SB-OCT одним из вышеописанных способов. Сам глаз 1 может быть указан очень схематично, где для наглядности только зрачок 6 и радужная оболочка 3 показаны явно и затенение подавлено.
В общем случае индикатор рассогласования положения может включать в себя индикатор 144 положения или сдвига глаза на основании определенного положения изображаемого участка глаза и эталона положения или сдвига или эталонного шаблона 148-s. Оператор системы 100 позиционирования может уменьшать рассогласование сдвига изображаемого участка глаза путем совмещения индикатора 144 положения или сдвига глаза с эталоном 148-s положения. В вариантах осуществления, где изображаемый участок глаза включает в себя хрусталик 7, варианты осуществления индикатора 144 положения или сдвига глаза могут представлять положение хрусталика или сдвиг хрусталика и поэтому будем именовать его индикатором 144 сдвига глаза/хрусталика.
Кроме того, индикатор рассогласования ориентации может включать в себя индикатор 146 ориентации или наклона глаза на основании определенной ориентации изображаемого участка глаза и эталона 148-t ориентации или наклона. Оператор системы 100 позиционирования может уменьшать рассогласование ориентации или наклон изображаемого участка глаза путем совмещения индикатора 146 ориентации глаза с эталоном 148-t ориентации или наклона. В вариантах осуществления, где изображаемый участок глаза включает в себя хрусталик 7, индикатор 146 ориентации глаза может представлять наклон хрусталика, и поэтому будем именовать его индикатором 146 наклона глаза/хрусталика.
Фиг. 7A иллюстрирует вариант осуществления, где эталон 148-s сдвига и эталон 148-t наклона объединены в единую цель, перекрестие, или эталонный шаблон 148 на блоке 142 отображения. В других реализациях эталоны 148-s и 148-t могут быть разделены, например два прицельных шаблона могут отображаться рядом друг с другом или два эталонных шаблона могут отображаться на отдельных экранах или в отдельных областях одного и того же дисплея.
Фиг. 7A-B иллюстрируют, что индикатор 144 сдвига глаза (или индикатор сдвига) и индикатор 146 ориентации глаза (или индикатор наклона) могут представлять собой метки или пиктограммы на блоке 142 отображения, например показанные метки X и O. Систему 110 формирования изображения можно калибровать таким образом, что сдвиг глаза и наклон глаза полностью компенсируются или исключаются, когда соответствующие индикаторы 144 и 146 сдвига и наклона манипулируются в центр объединенного эталонного шаблона 148.
Фиг. 8A иллюстрирует, что некоторые системы 100 позиционирования могут включать в себя гентри 150, управляемый контроллером 152 гентри, способным перемещаться по существу поперек оптической оси 52 PI интерфейса 50 пациента и оптического узла 130. Гентри 150 может быть выполнен с возможностью заключать в себе или охватывать объектив 154 оптического узла 130, к которому может быть присоединен интерфейс 50 пациента. Благодаря этой конструкции оператор системы 100 позиционирования может управлять гентри 150 для перемещения или регулировки объектива 154, интерфейса 50 пациента и его контактной линзы 51, таким образом уменьшая и в итоге устраняя рассогласование сдвига или положения глаза.
Система 140 наведения может помогать хирургу в этой процедуре, отображая метку или пиктограмму 144 индикатора сдвига хрусталика на блоке 142 отображения. Хирург может перемещать гентри 150 для перемещения индикатора 144 сдвига ближе к центру или началу отсчета 148 по существу с использованием эталона 148 в качестве перекрестия или цели. Индикатор 144 сдвига, достигая центр перекрестия 148, может сигнализировать хирургу, что рассогласование положения или сдвига Δ глаза устранено.
Аналогичным образом, система 140 наведения может отображать индикатор 146 наклона на блоке 142 отображения для помощи хирургу в уменьшении и в итоге в устранении рассогласования ориентации за счет перемещения индикатора 146 наклона в центр эталона или перекрестия 148.
Наклон хрусталика невозможно компенсировать, наклоняя оптическую ось лазерной системы, поскольку большинство лазерных систем или оптических узлов не допускают такого наклона. Кроме того, перемещение гентри 150 может не позволять компенсировать и рассогласование наклона хрусталика. Поэтому в некоторых вариантах осуществления системы 100 позиционирования хирург может предпочесть вербально дать указание пациенту повернуть изображаемый глаз для уменьшения его рассогласования ориентации. Хирург может контролировать перемещение пиктограммы или индикатора 146 наклона, когда пациент поворачивает глаз и может давать новые инструкции на основании действий пациента. Подача инструкций в итерационном режиме может помогать хирургу перемещать пиктограмму 146 наклона в центр перекрестия 148, уменьшая и в итоге устраняя рассогласование наклона.
Фиг. 8A иллюстрирует, что в других реализациях системы 100 позиционирования система 140 наведения может включать в себя систему 160 света фиксации, выполненную таким образом, что хирург или оператор может регулировать свет 165 фиксации системы 160 света фиксации, чтобы наводить действия пациента при осуществлении по меньшей мере одного из поворота или поперечного перемещения глаза. Свет 165 фиксации может проецироваться в глаз, по которому не осуществляется позиционирование, или контрольный глаз 1c, как показано.
Фиг. 8B показывает, что свет 165 фиксации также может проецироваться в стыкующийся глаз 1d согласно альтернативному варианту осуществления системы 160 света фиксации.
Система 160 света фиксации может быть преимущественно объединена с другими системами света фиксации, описанными, например в патентном документе того же заявителя “Electronically Controlled Fixation Light for Ophthalmic Imaging Systems”, от T. Juhasz и др., заявка на патент № US 12/885,193, включенная в настоящее описание в полном объеме путем ссылки.
Фиг. 9A-C иллюстрируют этапы процедуры уменьшения рассогласования. Фиг. 9A иллюстрирует оптическую ось 11 хрусталика, имеющую как наклон φ, так и сдвиг Δ относительно оптической оси 52 PI, также именуемой оптической осью 28 системы, в случае когда хрусталик 7 не выровнен даже с самим глазом 1.
Фиг. 9B иллюстрирует этап процедуры после того, как хирург обеспечил поворот глаза пациента, либо давая словесную инструкцию пациенту, за счет перемещения глаза 1 вручную, либо путем регулировки света 165 фиксации. На этом этапе рассогласование наклона φ уменьшается или оптимально устраняется, в результате чего оптическая ось 11 хрусталика совмещается или становится параллельной с оптической осью 52 PI, но все же имеет остаточные рассогласование сдвига Δ’. Уменьшение или устранение рассогласования наклона φ представляется на видеодисплее 142 индикатором 146 наклона глаза/хрусталика, переместившимся в центр эталонного шаблона 148, тогда как индикатор 144 сдвига глаза/хрусталика остается смещенным относительно центра эталонного шаблона 148.
Фиг. 9C иллюстрирует второй этап после того, как хирург перемещает гентри 150 для компенсации остаточного сдвига Δ’. На этом этапе оптическая ось 11 хрусталика и оптическая ось 52 PI (или оптическая ось 28 системы) могут полностью совмещаться, возможно полностью совпадая. После того как остаточный сдвиг Δ’ также устранен, индикатор 146 наклона глаза/хрусталика и индикатор 144 сдвига глаза/хрусталика перемещаются в центр эталонного шаблона 148.
Фиг. 10A иллюстрирует, что в некоторых реализациях система 100 позиционирования может быть выполнена с возможностью не только отображения пиктограммы/индикаторы 144 и 146 сдвига и наклона на основании, обработки изображения SB-OCT процессором 120 изображений, но и обеспечения дополнительного рассчитанного наведения позиционирования для хирурга. Процессор 120 изображений может не только определять, где отображать индикатор 146 наклона глаза/хрусталика и индикатор 144 сдвига глаза/хрусталика относительно эталонного шаблона 148, но и может быть выполнен с возможностью вычисления отклика уменьшения рассогласования и его отображения оператору системы. В частности, процессор 120 изображений может вычислять рассогласование положения на основании рассогласования определенного положения изображаемого участка глаза и эталона положения офтальмологической системы позиционирования и отображать вариант осуществления индикатора 144 рассогласования положения или сдвига, который включает в себя индикатор 144 коррекции сдвига на основании вычисленного рассогласования положения.
В показанной реализации индикатором 144 коррекции сдвига может быть вектор, отображаемый на видеомониторе 142, демонстрирующий направление, в котором нужно переместить гентри для уменьшения рассогласования сдвига. Величина вектора может указывать величину перемещения гентри. Вектор 144 индикатора коррекции сдвига можно дополнять отображаемыми предложениями по численной коррекции, например, на сколько миллиметров нужно переместить гентри и в каком именно направлении.
Фиг. 10A также иллюстрирует аналогичный индикатор 146 коррекции наклона, являющийся частью индикатора 146 наклона, вычисленного на основании рассогласования определенной ориентации изображаемого участка глаза, например оптической оси 11 хрусталика, и эталона ориентации офтальмологической системы позиционирования, например оптической оси 28 системы или оптической оси 52 PI. Система 140 наведения может отображать на видеомониторе или блоке 142 отображения индикатора 146 рассогласования ориентации или коррекции наклона на основании вычисленного рассогласования ориентации. Индикатор 146 коррекции наклона может включать в себя вектор коррекции наклона, величина и направление которого, возможно, дополняется численными значениями, может указывать, насколько свет 165 фиксации системы 160 света фиксации нужно перемещать и в каком направлении для компенсации наклона.
На фиг. 11A показан другой вариант осуществления системы 100 позиционирования на основе формирования изображения. В этой системе 100 позиционирования система 140 наведения и через нее, возможно, процессор 120 изображений может электронными средствами соединяться с системой 177 уменьшения рассогласования. Система 177 уменьшения рассогласования может быть способна уменьшать одно или более рассогласований изображаемого глаза относительно оптической оси 52 PI или, в общем случае, оптического узла 130.
Система 177 уменьшения рассогласования может включать в себя гентри 150 с контроллером 152 гентри, или источник 160 света фиксации, или их оба. В этих реализациях система 140 наведения может не только вычислять индикаторы 144 и 146 коррекции сдвига и наклона, как в реализации на фиг. 10A, но может отправлять фактические сигналы управления через электронное соединение с по меньшей мере одним из контроллера 152 гентри и системы 160 света фиксации, чтобы фактически осуществлять соответствующие коррекции рассогласования путем регулировки гентри 150 или света 165 фиксации, не ожидая анализа или вмешательства хирурга. В некоторых реализациях система 140 наведения может включать в себя корректор 149 рассогласования, который осуществляет вычисление и формирование упомянутых сигналов управления на основании процессора 120 изображений, определившего наклон φ и сдвиг Δ относительно оптической оси 52 PI. В других реализациях эти функции может осуществлять сам процессор 120 изображений.
Контроллер 152 гентри, получая сигнал управления из системы 140 наведения, может перемещать гентри 150 для регулировки позиции объектива 154 для уменьшения рассогласования положения изображаемого участка глаза. В других примерах система 160 света фиксации, получая сигнал управления из системы 140 наведения, может формировать или регулировать свет 165 фиксации из глаза пациента, чтобы предписывать или направлять уменьшение рассогласования ориентации изображаемого участка глаза. Как и раньше, система 160 света фиксации может проецировать свет 165 фиксации либо в контрольный глаз 1c, либо в стыкующийся глаз 1d.
В таких компьютеризированных реализациях рассогласования сдвига и наклона можно уменьшать или устранять, в основном, под электронным управлением системы 140 наведения. Эти реализации могут освобождать хирурга от необходимости фактически осуществлять некоторые или все компенсации рассогласования: обязанности хирурга могут ограничиваться только наблюдением за уменьшением рассогласования, осуществляемым компьютеризированной системой 100 позиционирования.
Фиг. 10B иллюстрирует другую реализацию системы 140 наведения. В этом примере по меньшей мере один из индикатора рассогласования положения и индикатора рассогласования ориентации может включать в себя изображение участка хрусталика глаза, указывающее соответствующее рассогласование.
В показанном примере система 140 наведения может перекрывать OCT-изображение хрусталика 7 видеоизображением глаза и эталонным шаблоном 148, образующим объединенный индикатор 147 сдвига-наклона. В ряде случаев OCT-изображение может быть лишь символическим, например упрощенным изображением на основании модельной формы фактического OCT-изображения. Положение и ориентация наложенного изображения хрусталика в качестве индикатора 147 сдвига-наклона относительно эталона 148 может инструктивно представлять хирургу рассогласование наклона и сдвига хрусталика 7. В ряде случаев хирург может получать инструкцию центрировать наложенное изображение 147 хрусталика с центром эталона 148 для устранения сдвига и для совмещения главных осей эллипсоидального изображения 147 хрусталика с главными осями эталонного шаблона 148 для устранения наклона.
OCT-изображение хрусталика 7, используемое в индикаторе 147 сдвига-наклона, можно получать, например, следующим образом. Сначала может осуществляться круговое OCT-сканирование, дающее синусоидальное OCT-изображение. Можно идентифицировать угол углового сканирования, соответствующий максимуму и минимуму OCT. Затем может осуществляться линейное сканирование через хрусталик 7, между максимальным и минимальным углами, которые, вероятно, либо пересекают центр хрусталика 7, либо по меньшей мере проходят достаточно близко к нему. Результат этого линейного сканирования может быть весьма инструктивен в отношении сдвига и наклона хрусталика 7. Таким образом, отображение OCT-изображения хрусталика, полученное посредством линейного сканирования на дисплее 142 видеомикроскопа, в качестве индикатора 147 сдвига-наклона может помогать хирургу эффективно уменьшать или устранять рассогласования.
Основной функцией системы 100 позиционирования является оказание помощи в позиционировании интерфейса 50 пациента по отношению к глазу 1. Вышеописанные варианты осуществления, которые формируют изображение изображаемого участка глаза до позиционирования и обеспечивают индикаторы 144 и 146 сдвига и наклона, совместно с прицельным эталонным шаблоном 148 хорошо осуществляют эту функцию.
Производительность системы 100 позиционирования можно дополнительно повысить за счет реализации системы 110 формирования изображения, которая способна формировать изображение изображаемого участка глаза не только перед самим офтальмологическим позиционированием, но неоднократно в ходе позиционирования.
Системы, отображающие одно или несколько обновленных изображений в ходе процедуры позиционирования, могут обеспечивать ценную обратную связь в отношении действий хирурга, обеспечивая повышение точности и производительности системы 100 позиционирования.
Некоторые варианты осуществления системы 110 формирования изображения могут предлагать в связи с этим дополнительное качественное улучшение. Они могут обеспечивать не только несколько обновленных изображений в ходе позиционирования, но по существу оперативное изображение процедуры позиционирования. По существу, оперативная обратная связь может регулярно доставлять хирургу информацию для центрирования позиционирования с повышенной точностью и оптимизации процесса несколькими разными способами.
Часто используемая частота обновления оперативных видеоизображений обычно равна 24 кадрам в секунду. Поэтому системы формирования изображения, которые могут обеспечивать изображения с частотой 20-25 кадров в секунду или выше, могут обеспечивать изображения, которые будут выглядеть по существу оперативными для хирурга. В то время как системы с частотой кадров или частотой обновления менее 20-25 кадров в секунду могут не восприниматься как формирующие оперативные видеоизображения, но как отрывистые, скачкообразные изображения, возможно даже отвлекающие от процедуры позиционирования.
В этом отношении варианты осуществления настоящей системы 110 формирования изображения можно классифицировать следующим образом. Системы OCT во временной области, или TD-OCT, строят A-растр, т.е. изображают диапазон глубин, соответствующий последовательно единственной поперечной координате (x, y). Поэтому A-растры TD-OCT занимают много времени, и системы TD-OCT могут делать лишь от нескольких сотен до нескольких тысяч A-растров в секунду. В некоторых вариантах осуществления их производительность может быть даже ниже. Для получения OCT-изображения с приемлемым разрешением может потребоваться объединение нескольких сотен A-растров, сделанных вдоль линии точек (x, y) в B-растр. Поэтому системы TD-OCT могут формировать B-растры с частотой обновления 1-10 кадров в секунду, часто всего лишь один или несколько кадров в секунду. Такие изображения выглядят отрывистыми для хирурга и обеспечивают более медленную, чем оперативную обратную связь для процесса позиционирования. Поэтому системы TD-OCT не могут обеспечивать достаточно быструю обратную связь для подтверждения или отрицания регулировок рассогласования, производимых хирургом при фактической скорости позиционирования.
Эта низкая производительность формирования изображения имеет недостатки. Например, офтальмологическая система 100 позиционирования выполнена с возможностью наведения и помощи в совмещении PI 50 с глазом 1 перед позиционированием. На этом этапе перед позиционированием пациент 19 все еще способен совершать движения глазом 1. В частности, пациент дышит, двигая глазом вверх и вниз. При низких скоростях формирования изображения система TD-OCT формирования изображения не поспевает за дыхательным движением глаз вверх и вниз, в результате чего система TD-OCT формирования изображения отображает артефакты движения, например скачки в изображении и прерывистые линии изображения.
Напротив, системы на основе спектрометра, или SB-OCT, собирают данные изображения в точке (x, y) одновременно со всех глубин. Эти изображения иногда по-прежнему именуются A-растрами, хотя никакого последовательного сканирования не предусмотрено. Вследствие параллельного или одновременного характера сбора данных изображения с разных глубин, системы SB-OCT могут делать вплоть до 500,000 A-растров в секунду. Поэтому один и тот же B-растр, содержащий несколько сотен A-растров, как описано выше, может формироваться с частотой обновления более 20 кадров в секунду, возможно вплоть до 1,000 кадров в секунду.
Здесь следует заметить, что в действительности отображение этих изображений также занимает время и может ограничиваться электронной производительностью блока 142 отображения OCT. Вышеупомянутые скорости обновления характеризуют скорость получения изображения системой 110 формирования изображения. Скорость отображения может быть ниже, в зависимости от факторов ограничения быстродействия электроники и скорости передачи данных.
Производительность систем SB-OCT можно дополнительно ускорить с использованием специальных процессоров и заранее вычисленных шаблонов сканирования, хранящихся в специальных блоках памяти для возбуждения быстрого сканирования пучком формирования изображения, как описано, например, в вышеупомянутой заявке на патент США “Image-Guided Docking for Ophthalmic Surgical Systems” от A. Juhasz и K. Vardin.
При условии, что скорости формирования изображения систем SB-OCT и TD-OCT формирования изображения находятся на противоположных сторонах частоты кадров оперативного видео 20-25 кадров в секунду, варианты осуществления системы 110 формирования изображения, которые используют системы SB-OCT формирования изображения, способны предоставлять хирургу информацию регулярной и безразрывной оперативной обратной связи, без двигательных артефактов, тогда как типичные системы TD-OCT формирования изображения не способны предоставлять хирургу безразрывную оперативную обратную связь и склонны к отображению двигательных артефактов. Системы с оперативной обратной связью формирования изображения, как рассмотрено выше, предлагают качественно повышенную точность процедуры позиционирования.
Кроме того, повышенная скорость формирование изображения позволяет системам 110 SB-OCT формирования изображения создавать значительно более сложные, резкие и детализированные изображения и все же обеспечивать изображения как оперативное видео. Примеры включают в себя двухмерные изображения хрусталика 7 или сканирование хрусталика 7 по нескольким окружностям для картирования фактической формы хрусталика 7 вместо использования моделей и опоры на предположения о геометрии и форме хрусталика 7.
Окончательный фактор, влияющий на производительность в долгосрочной перспективе вариантов осуществления системы 110 формирования изображения, состоит в том, что системы SB-OCT не имеют подвижных деталей и таким образом их надежность и ремонтопригодность весьма удовлетворительна. Напротив, системы TD-OCT имеют быстродвижущиеся детали, связанные с перемещением эталонного зеркала в эталонном кронштейне устройства OCT. Очевидно, наличие подвижных деталей в системах TD-OCT увеличивает вероятность отказа и рассогласования, таким образом, возможно, уменьшая их общую производительность, требуя более частого технического обслуживания в условиях эксплуатации и все же не исключая возможности уменьшения производительности в долгосрочной перспективе.
В итоге системы TD-OCT не обязательно эквивалентны системам SB-OCT по меньшей мере по следующим причинам. (i) Системы TD-OCT не обеспечивают оперативного формирования изображения или изображений обратной связи на скоростях обновления, полезных для высокоточного позиционирования и хирургических процессов. (ii) Системы TD-OCT склонны к отображению двигательных артефактов. (iii) Системы TD-OCT также могут сталкиваться с трудностями в обеспечении 2D сканированных изображений или высокоточных детализированных изображений. (iv) Наконец, системы TD-OCT формирования изображения требуют обслуживания и ремонта в условиях эксплуатации гораздо чаще, чем система SB-OCT. Таким образом, системы TD-OCT и системы SB-OCT достаточно отличаются, из-за чего для многих применений они не являются эквивалентными вариантами осуществления общей системы OCT. Напротив, степень их различия в производительности для конкретного применения подлежит анализу для каждого случая в отдельности.
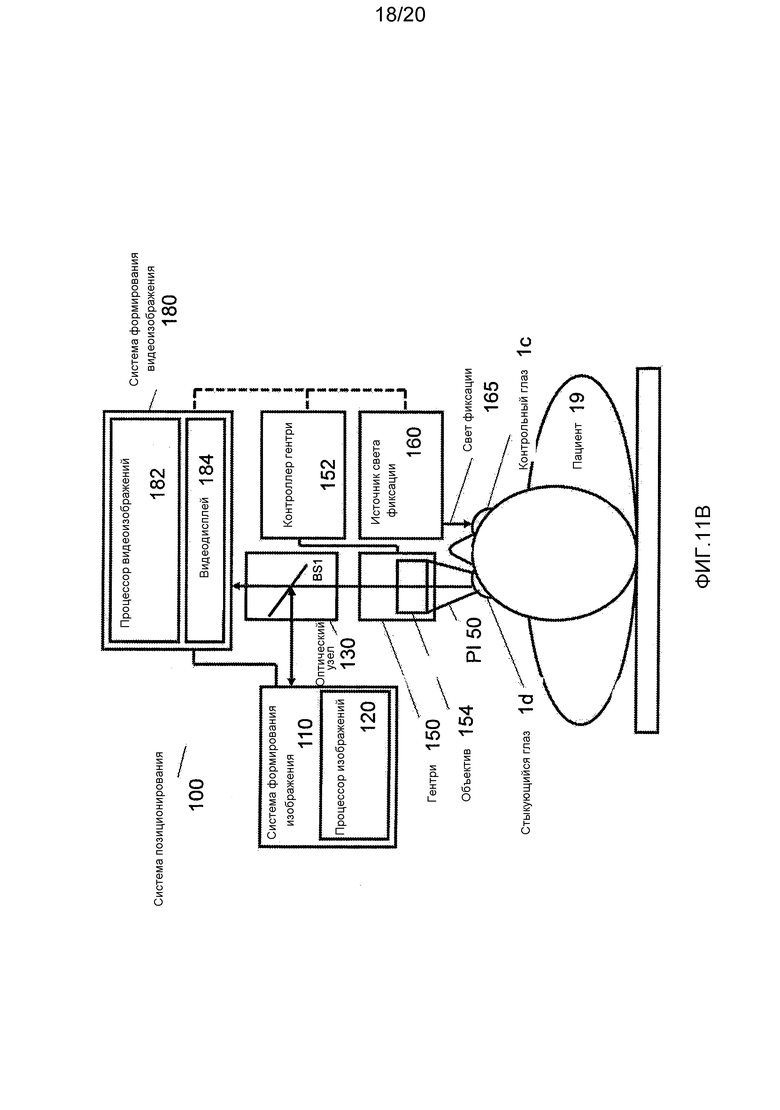
Фиг. 11B показывает, что другие реализации системы 100 позиционирования могут получать некоторую информацию рассогласования из видеоизображения, созданного системой 180 формирования видеоизображения. В этих системах 100 позиционирования варианты осуществления офтальмологической системы 110 формирования изображения могут включать в себя OCT или систему 110 формирования глубинного изображения, которая может формировать глубинное изображение внутренней структуры глаза для глаза 1. Процессор 120 изображений может включать в себя процессор 120 глубинных изображений, который может определять ориентацию внутренней структуры глаза из глубинного изображения внутренней структуры глаза.
Кроме того, система 100 позиционирования и, в частности, система 140 наведения может включать в себя систему 180 формирования видеоизображения, которая может включать в себя процессор 182 видеоизображений и видеодисплей 184, который может быть аналогичен дисплею 142 видеомикроскопа. Система 180 формирования видеоизображения может быть выполнена с возможностью формирования видеоизображения фронтальной структуры глаза для глаза, и процессор 182 видеоизображений может быть выполнен с возможностью определения положения фронтальной структуры глаза из видеоизображения фронтальной структуры глаза. Как и раньше, система 180 формирования видеоизображения может быть соединена с офтальмологической системой 110 формирования изображения и может быть выполнена с возможностью отображения на видеодисплее 184 индикатора рассогласования ориентации с использованием определенной ориентации внутренней структуры глаза, определенной с помощью процессора 120 изображений, и индикатора рассогласования положения с использованием определенного положения фронтальной структуры глаза, определенного с помощью процессора 182 видеоизображений.
В некоторых реализациях процессор 120 глубинных изображений может осуществлять процесс распознавания изображений для распознавания участка сканированного изображения 114 ACL и участка сканированного изображения 116 PCL в изображении внутренней структуры глаза, которой может быть хрусталик 7, или его капсулярная сумка, или его уплотненное ядро.
Процессор 120 глубинных изображений может определять рассогласование ориентации или наклона изображаемой внутренней структуры глаза на основании результатов процесса распознавания изображений, осуществляя любой из способов, описанных в связи с фиг. 6, и затем используя фазы и амплитуды сканированного изображения.
Процессор 182 видеоизображений может осуществлять процесс распознавания видеоизображения для распознавания изображения фронтальной структуры глаза в видеоизображении и для определения положения фронтальной структуры глаза на основании результата процесса распознавания видеоизображения. Изображаемой фронтальной структурой глаза может быть, например, зрачок 6 или лимб 5 глаза.
Как описано в отношении фиг. 4-6, анализ с помощью процессора 120 глубинных изображений может определять не только ориентацию хрусталика 7, внутренней структуры глаза, но и его (ее) положение. Поэтому в некоторых реализациях система 100 позиционирования может определять два положения: положение изображаемой внутренней структуры глаза, определяемое с помощью процессора 120 глубинных изображений, и положение фронтальной структуры глаза, определяемое системой 180 формирования видеоизображения. Поскольку внутренняя структура глаза может быть не полностью выровнена с глазом, эти два положения могут различаться.
Совмещение интерфейса 50 пациента с положением изображаемой внутренней структуры глаза, с положением фронтальной структуры глаза или с промежуточным или усредненным положением, формируемым с использованием обоих этих положений, может быть преимущественным для различных целей.
Фиг. 7A-B и фиг. 10A показывают, что после осуществления этапов распознавания изображений системой 110 формирования глубинного изображения и системой 180 формирования видеоизображения, видеодисплей 184 может отображать индикатор рассогласования ориентации глаза, связанный с определенной ориентацией изображаемой внутренней структуры глаза, который включает в себя индикатор 146 ориентация глаза и эталон 148 ориентации. Согласно варианту осуществления, где изображаемой внутренней структурой глаза является хрусталик 7, хирург может уменьшать рассогласование наклона хрусталика путем совмещения индикатора 146 наклона хрусталика с эталоном 148 ориентации. Как описано в связи с фиг. 7-10, хирург может достигать этого совмещения, предписывая пациенту 19 поворачивать стыкующийся глаз или вручную поворачивая глаз 1, или, в том числе, путем регулировки источника 160 света фиксации.
Видеодисплей 184 также может отображать индикатор рассогласования положения, который включает в себя индикатор 144 положения глаза, связанный с определенным положением фронтальной структуры глаза в видеоизображении, и эталон 148 положения офтальмологической системы позиционирования. Как и раньше, оператор офтальмологической системы 100 позиционирования может уменьшать рассогласование положения хрусталика путем совмещения индикатора 144 положения хрусталика с эталоном 148 положения. Как описано в связи с фиг. 7-10, хирург может уменьшать это рассогласование положения, управляя гентри 150.
Систему 100 позиционирования, показанную на фиг. 11B, можно использовать в сочетании с любым блоком или узлом вариантов осуществления, описанных ранее со ссылкой на фиг. 2, фиг. 8A-B и фиг. 11A. Например, система 100 позиционирования может включать в себя источник 160 света фиксации, выполненный с возможностью регулировки света 165 фиксации в связи с по меньшей мере одним из индикатора рассогласования положения и индикатора рассогласования ориентации.
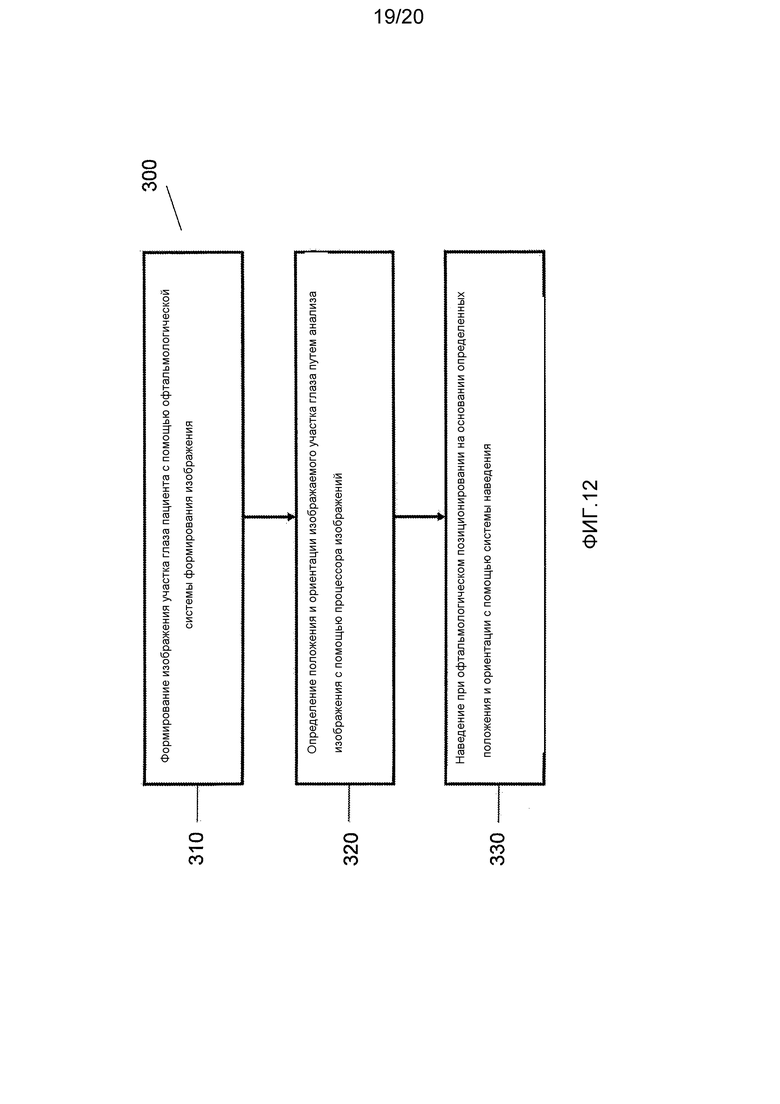
Фиг. 12 показывает, что вариант осуществления способа 300 наведения в офтальмологическом позиционировании может включать в себя: формирование 310 изображения участка глаза 1 пациента 19 с помощью офтальмологической системы 110 формирования изображения; определение 320 положения и ориентации изображаемого участка глаза 1 путем анализа изображения с помощью процессора 120 изображений; и наведение 330 офтальмологического позиционирования на основании определенных положения и ориентации с помощью системы 140 наведения.
Формирование 310 изображения может включать в себя формирование изображения по меньшей мере одного из капсулы хрусталика, переднего капсулярного слоя ACL 14, заднего капсулярного слоя PCL 16, целевой области хрусталика, хрусталика 7, его ядра, роговицы 2, радужной оболочки 3, лимба 5, зрачка 6, роговичного эндотелия и роговичного эпителя.
В вариантах осуществления, в которых формирование 310 изображения включает в себя формирование изображения участка хрусталика 7 глаза, определение 320 может включать в себя осуществление процесса распознавания изображений для распознавания сканированного изображения 114 ACL переднего капсулярного слоя ACL 14 и для распознавания сканированного изображения 116 PCL заднего капсулярного слоя PCL 16 в изображении.
Как описано в отношении фиг. 6, после осуществления распознавания изображений, определение 320 может дополнительно включать в себя определение передней фазы и передней амплитуды сканированного изображения 114 ACL и задней фазы и задней амплитуды сканированного изображения 116 PCL, и определение положения и ориентации хрусталика 7 из передней фазы, передней амплитуды, задней фазы и задней амплитуды.
В других вариантах осуществления определение 320 может включать в себя определение передней максимальной глубины и передней минимальной глубины переднего капсулярного слоя и задней максимальной глубины и задней минимальной глубины заднего капсулярного слоя по переменной сканирования; и определение положения и ориентации хрусталика 7 из передней максимальной глубины, передней минимальной глубины, задней максимальной глубины и задней минимальной глубины.
В прочих вариантах осуществления определение 320 может включать в себя распознавание изображение участка капсулярного слоя хрусталика в изображении; определение фазы и амплитуды капсулярного слоя; и определение положения и ориентации хрусталика с использованием определенной фазы и амплитуды.
Наведение 330 может включать в себя отображение индикатора рассогласования положения на основании определенного положения изображаемого участка глаза и отображение индикатора рассогласования ориентации на основании определенной ориентации изображаемого участка глаза.
Наведение 330 также может включать в себя отображение, в составе индикатора рассогласования положения, индикатора 144 положения глаза или хрусталика на основании определенного положения изображаемого участка глаза и эталона 148-s положения офтальмологической системы позиционирования и отображение, в составе индикатора рассогласования ориентации, индикатора 146 ориентации глаза или хрусталика на основании определенной ориентации изображаемого участка глаза и эталона 148-t ориентации офтальмологической системы позиционирования. Эталон 148-t ориентации и эталон 148-s положения могут быть одним и тем же прицельным или эталонным шаблоном 148.
Наведение 330 также может включать в себя отображение индикатора рассогласования положения для помощи оператору офтальмологической системы 100 позиционирования в управлении гентри 150 для уменьшения рассогласования положения глаза или хрусталика. Кроме того, наведение 330 также может включать в себя отображение индикатора 146 рассогласования ориентации для помощи хирургу в предписывании пациенту 19 поворачивать глаз, или в поворачивании глаза вручную, или в регулировке источника 160 света фиксации для уменьшения рассогласования ориентации глаза.
Способ 300 может включать в себя неоднократное осуществление формирование 310 изображения, определение 320 и наведение 330. Наведение 330 может включать в себя обновление отображения индикатора рассогласования положения и индикатора рассогласования ориентации согласно повторяющемуся формированию 310 изображения и определение 320 в ходе офтальмологического позиционирования. Такая производительность повторения способа 300 наведения может обеспечивать ценную обратную связь для хирурга, повышающую точность процесса позиционирования. Дополнительное качественное улучшение может достигаться за счет обновления изображения или повторения формирования изображения на частоте обновления оперативного видео, например 20-25 кадров в секунду или более. Повторение способа 300 на таких частотах обновления видео позволяют обеспечивать обратную связь оперативного видео для хирурга.
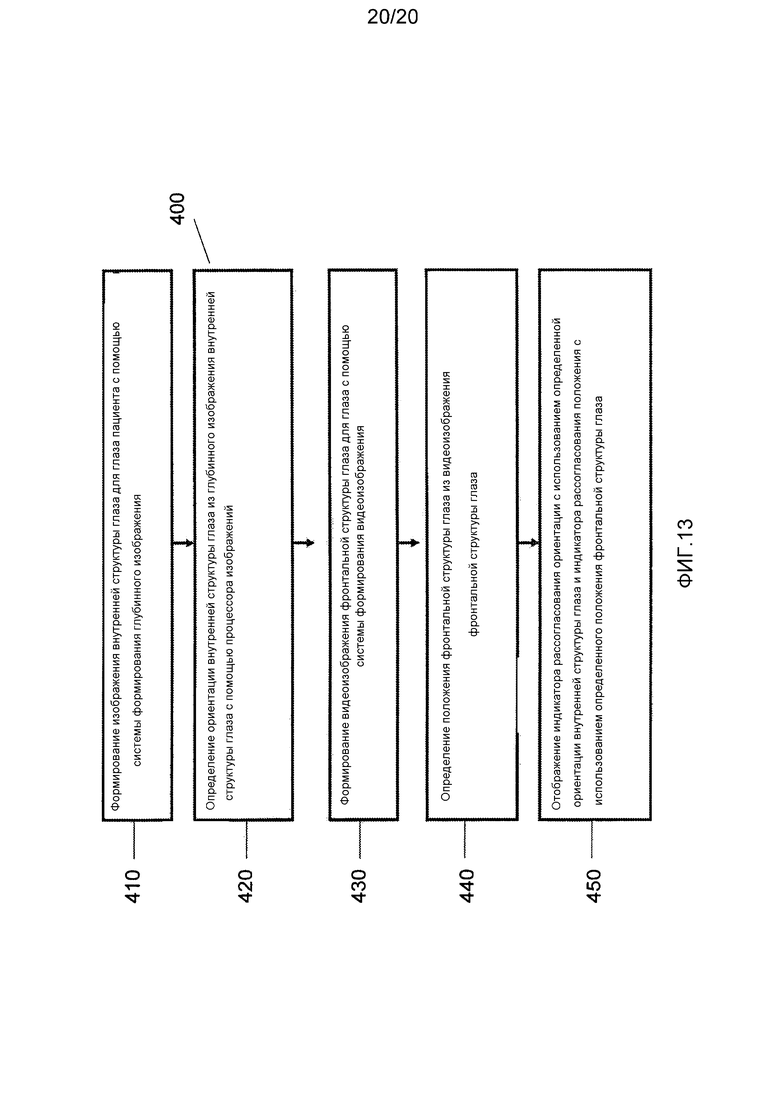
Фиг. 13 показывает, что альтернативный способ 400 наведения при офтальмологическом позиционировании может включать в себя: формирование 410 изображения внутренней структуры глаза для глаза пациента с помощью системы 110 формирования глубинного изображения; определение 420 ориентации внутренней структуры глаза из глубинного изображения внутренней структуры глаза с помощью процессора 120 изображений; формирование 430 видеоизображения фронтальной структуры глаза для глаза с помощью системы 180 формирования видеоизображения; определение 440 положения фронтальной структуры глаза из видеоизображения фронтальной структуры глаза с помощью процессора 182 видеоизображений; и отображение 450 индикатора рассогласования ориентации с использованием определенной ориентации внутренней структуры глаза и индикатора рассогласования положения с использованием определенного положения фронтальной структуры глаза с помощью системы 140 наведения или блока 184 отображения видео.
Другой вариант осуществления системы 140 наведения при совмещении может включать в себя систему, которая обеспечивает наведение по точному соединению интерфейса 50 пациента с дальним концом офтальмологической системы 100 позиционирования, ее оптическому узлу 130 или ее объективу 154. Точность роговичных насечек, создаваемых в ходе операций LASIK, очень чувствительна к малейшим рассогласованиям оптической оси 52 PI с оптической осью 28 системы, даже порядка десяти микрон. Поэтому значительного повышения производительности можно добиться путем применения системы 140 наведения на основе формирования изображения для формирования изображения самого интерфейса 50 пациента до и в ходе процесса его присоединения к дальнему концу системы 100 даже до инициирования любого процесса позиционирования и для обеспечения хирургу наведения в регулировке PI 50 на основании изображаемых рассогласований PI 50 и объектива 154.
Еще одно применение предусматривает использование системы 140 наведения не для помощи в процедуре позиционирования, а для наведения совместно с ультразвуковой факохирургической системой при точном нацеливании на различных этапах операции, включая введение факоиглы хирургом-офтальмологом.
В еще одной реализации офтальмологическая система 140 наведения может быть соединена с офтальмологической системой 110 формирования изображения, которая включает в себя систему формирования изображения OCT на основе спектрометра (SB-OCT). Система 110 формирования изображения может быть выполнена с возможностью формирования оперативного изображения глазной области, модифицированной в результате хирургической операции. В некоторых реализациях частота обновления изображения может составлять 20-25 кадров в секунду или выше.
В вышеприведенном описании изобретения множество систем включают в себя один или более программируемых процессоров и множество этапов способа включают в себя процессоры, функционирующие на основании соответствующей сохраненной программы. В этих системах существуют варианты осуществления, в которых системы включают в себя системы памяти, соединенные с процессорами, где могут храниться соответствующие программы, и программные средства, которые хранятся в системах памяти. Например, процессор 120 изображений, система 140 наведения, контроллер 152 гентри, система 177 уменьшения рассогласования и процессор 182 видеоизображений имеют варианты осуществления, которые включают в себя память или системы памяти, соответствующие этим процессорам, где могут храниться программы или программные средства для их процессора, возможно на машиночитаемых носителях.
Хотя описание изобретения содержит много конкретики, это не следует рассматривать как ограничение объема изобретения или формулы изобретения, но лишь как описание признаков, характерных для конкретных вариантов осуществления. Определенные признаки, описанные в этом описании изобретения в контексте отдельных вариантов осуществления, также можно реализовать совместно в едином варианте осуществления. Напротив, различные признаки, описанные в контексте единого варианта осуществления, также можно реализовать в нескольких вариантах осуществления по отдельности или в любой подходящей подкомбинации. Кроме того, хотя признаки могут быть описаны выше как действующие в определенных комбинациях и даже первоначально заявлены как таковые, один или более признаков из заявленной комбинации могут в ряде случаев быть исключены из комбинации, и заявленная комбинация может относиться к подкомбинации или разновидности подкомбинации.

Группа изобретений относится к медицине. Офтальмологическая система позиционирования содержит: офтальмологическую систему формирования изображения, содержащую систему формирования изображения на основе оптической когерентной томографии, выполненную с возможностью формирования изображения участка глаза пациента в ходе позиционирования интерфейса пациента по отношению к глазу, и процессор изображений, выполненный с возможностью определения положения и ориентации изображаемого участка глаза путем анализа изображения; и систему наведения, соединенную с офтальмологической системой формирования изображения, выполненную с возможностью наведения позиционирования на основании определенных положения и ориентации перед позиционированием интерфейса пациента по отношению к глазу, причем изображаемый участок глаза содержит изображаемый участок хрусталика глаза; и процессор изображений выполнен с возможностью осуществления процесса распознавания изображений для распознавания сканированного изображения переднего капсулярного слоя хрусталика и сканированного изображения заднего капсулярного слоя хрусталика в изображении. При этом процессор изображений выполнен с возможностью определения передней максимальной глубины и передней минимальной глубины переднего капсулярного слоя и задней максимальной глубины и задней минимальной глубины заднего капсулярного слоя по переменной сканирования и определения положения и ориентации хрусталика из передней максимальной глубины, передней минимальной глубины, задней максимальной глубины и задней минимальной глубины. Способ наведения при офтальмологическом позиционировании содержит этапы, на которых: формируют изображение участка глаза пациента в ходе позиционирования интерфейса пациента по отношению к глазу; определяют положение и ориентацию изображаемого участка глаза путем анализа изображения; и осуществляют наведение при позиционировании на основании определенных положения и ориентации посредством системы наведения до позиционирования интерфейса пациента по отношению к глазу. Применение данной группы изобретений позволит повысить эффективность центрирования и позиционирования. 2 н. и 18 з.п. ф-лы, 13 ил.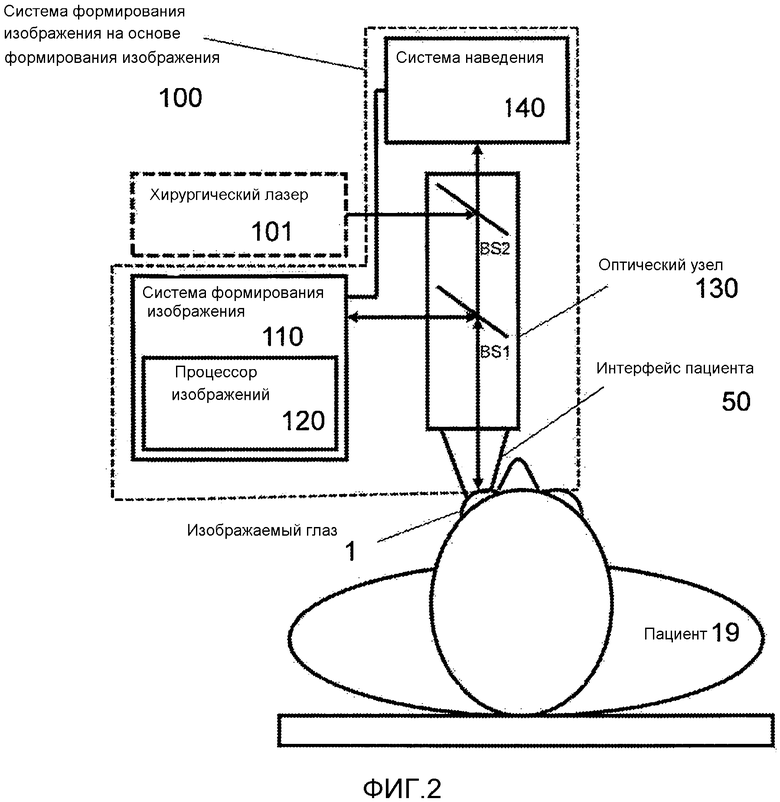
1. Офтальмологическая система позиционирования, содержащая:
офтальмологическую систему формирования изображения, содержащую:
систему формирования изображения на основе оптической когерентной томографии, выполненную с возможностью формирования изображения участка глаза пациента в ходе позиционирования интерфейса пациента по отношению к глазу, и
процессор изображений, выполненный с возможностью определения положения и ориентации изображаемого участка глаза путем анализа изображения; и
систему наведения, соединенную с офтальмологической системой формирования изображения, выполненную с возможностью наведения позиционирования на основании определенных положения и ориентации перед позиционированием интерфейса пациента по отношению к глазу, причем:
изображаемый участок глаза содержит изображаемый участок хрусталика глаза; и
процессор изображений выполнен с возможностью осуществления процесса распознавания изображений для распознавания сканированного изображения переднего капсулярного слоя хрусталика и сканированного изображения заднего капсулярного слоя хрусталика в изображении; и при этом:
процессор изображений выполнен с возможностью
определения передней максимальной глубины и передней минимальной глубины переднего капсулярного слоя и задней максимальной глубины и задней минимальной глубины заднего капсулярного слоя по переменной сканирования, и
определения положения и ориентации хрусталика из передней максимальной глубины, передней минимальной глубины, задней максимальной глубины и задней минимальной глубины.
2. Офтальмологическая система позиционирования по п. 1, в которой система формирования изображения на основе оптической когерентной томографии содержит:
по меньшей мере одно из системы оптической когерентной томографии (ОСТ) во временной области, системы ОСТ в частотной области и системы ОСТ на основе спектрометра.
3. Офтальмологическая система позиционирования по п. 1, в которой система формирования изображения на основе оптической когерентной томографии содержит:
сканирующую систему формирования изображения, выполненную с возможностью
осуществления сканирования путем направления пучка формирования изображения в точки по меньшей мере одной из дуги, линии, петли, окружности, эллипса, звезды, линии с повторяющимися признаками, двухмерного шаблона и двухмерной сетки, и
формирования изображения изображаемого участка глаза в диапазоне глубины в точках сканирования.
4. Офтальмологическая система позиционирования по п. 1, в которой:
изображаемый участок глаза содержит по меньшей мере одно из капсулы хрусталика, переднего капсулярного слоя хрусталика, заднего капсулярного слоя хрусталика, целевой области хрусталика, хрусталика и ядра.
5. Офтальмологическая система позиционирования по п. 1, в которой:
процессор изображений выполнен с возможностью анализа сканированных изображений распознанных слоев с использованием геометрической модели хрусталика для определения положения и ориентации хрусталика.
6. Офтальмологическая система позиционирования по п. 1, в которой:
процессор изображений выполнен с возможностью
определения передней фазы и передней амплитуды сканированного изображения переднего капсулярного слоя и задней фазы и задней амплитуды сканированного изображения заднего капсулярного слоя, и
определения положения и ориентации хрусталика из передней фазы, передней амплитуды, задней фазы и задней амплитуды.
7. Офтальмологическая система позиционирования по п. 1, в которой:
система наведения содержит блок отображения; и
система наведения выполнена с возможностью отображения на блоке отображения
индикатора рассогласования положения на основании определенного положения изображаемого участка глаза, и
индикатора рассогласования ориентации на основании определенной ориентации изображаемого участка глаза.
8. Офтальмологическая система позиционирования по п. 7, в которой:
индикатор рассогласования положения содержит:
индикатор положения глаза на основании определенного положения изображаемого участка глаза, и
эталон положения офтальмологической системы позиционирования, причем
оператор офтальмологической системы позиционирования может уменьшать рассогласование положения глаза путем совмещения индикатора положения глаза и эталона положения; и
индикатор рассогласования ориентации содержит:
индикатор ориентации глаза на основании определенной ориентации изображаемого участка глаза, и
эталон ориентации офтальмологической системы позиционирования, причем
оператор офтальмологической системы позиционирования может уменьшать рассогласование ориентации глаза путем совмещения индикатора ориентации глаза и эталона ориентации.
9. Офтальмологическая система позиционирования по п. 7, в которой:
офтальмологическая система наведения выполнена с возможностью
отображения индикатора рассогласования положения для содействия оператору офтальмологической системы позиционирования в работе с гентри офтальмологической системы позиционирования для уменьшения рассогласования положения глаза, и
отображения индикатора рассогласования ориентации для содействия оператору офтальмологической системы позиционирования в предписывании пациенту вращать глазом для уменьшения рассогласования ориентации глаза.
10. Офтальмологическая система позиционирования по п. 9, в которой:
система наведения содержит систему света фиксации, выполненную таким образом, что оператор может регулировать свет фиксации системы света фиксации, чтобы наводить действия пациента для осуществления по меньшей мере одного из поворота глаза и поперечного перемещения глаза.
11. Офтальмологическая система позиционирования по п. 7, в которой:
по меньшей мере одно из индикатора рассогласования положения и индикатора рассогласования ориентации содержит изображение участка хрусталика глаза, указывающее соответствующее рассогласование.
12. Офтальмологическая система позиционирования по п. 1, в которой:
офтальмологическая система формирования изображения выполнена с возможностью неоднократного формирования изображения изображаемого участка глаза в ходе офтальмологического позиционирования.
13. Офтальмологическая система позиционирования по п. 12, причем:
офтальмологическая система формирования изображения содержит ОСТ-систему формирования изображения на основе спектрометра, выполненную с возможностью формирования изображения изображаемого участка глаза с частотой обновления по меньшей мере 20 кадров в секунду.
14. Офтальмологическая система позиционирования по п. 1, в которой офтальмологическая система формирования изображения содержит:
систему формирования видеоизображения, выполненную с возможностью формирования видеоизображения фронтальной структуры глаза для глаза, причем
изображаемый участок глаза содержит внутреннюю структуру глаза и фронтальную структуру глаза.
15. Офтальмологическая система позиционирования по п. 14, в которой процессор изображений содержит:
процессор глубинных изображений, выполненный с возможностью определения ориентации внутренней структуры глаза из изображения внутренней структуры глаза, сформированного системой формирования изображения на основе оптической когерентной томографии; и
процессор видеоизображений, выполненный с возможностью определения положения фронтальной структуры глаза из видеоизображения фронтальной структуры глаза.
16. Офтальмологическая система позиционирования по п. 15, в которой:
процессор глубинных изображений выполнен с возможностью
осуществления процесса распознавания изображений для распознавания изображения участка переднего капсулярного слоя хрусталика глаза и изображения участка заднего капсулярного слоя хрусталика глаза в глубинном изображении внутренней структуры глаза, и
определения ориентации внутренней структуры глаза на основании результата процесса распознавания изображений.
17. Офтальмологическая система позиционирования по п. 15, в которой:
процессор видеоизображений выполнен с возможностью
осуществления процесса распознавания видеоизображения для распознавания изображения фронтальной структуры глаза в видеоизображении, и
определения положения фронтальной структуры глаза на основании результата процесса распознавания видеоизображения.
18. Офтальмологическая система позиционирования по п. 15, в которой:
процессор глубинных изображений выполнен с возможностью определения положения изображаемой внутренней структуры глаза; и
офтальмологическая система позиционирования выполнена с возможностью определения положения изображаемого участка глаза с использованием определенного положения внутренней структуры глаза и определенного положения фронтальной структуры глаза.
19. Офтальмологическая система позиционирования по п. 14, в которой система наведения содержит:
блок отображения видео, выполненный с возможностью отображения
индикатора рассогласования ориентации, связанного с ориентацией внутренней структуры глаза, и
индикатора рассогласования положения, связанного с положением фронтальной структуры глаза.
20. Способ наведения при офтальмологическом позиционировании, причем способ содержит этапы, на которых:
формируют изображение участка глаза пациента в ходе позиционирования интерфейса пациента по отношению к глазу посредством системы формирования изображения на основе оптической когерентной томографии офтальмологической системы формирования изображения;
определяют положение и ориентацию изображаемого участка глаза путем анализа изображения с помощью процессора изображений; и
осуществляют наведение при позиционировании на основании определенных положения и ориентации посредством системы наведения до позиционирования интерфейса пациента по отношению к глазу, причем формирование изображения содержит этап, на котором:
формируют изображение участка хрусталика глаза; и
определение содержит этап, на котором осуществляют процесс распознавания изображений для распознавания сканированного изображения переднего капсулярного слоя хрусталика и сканированного изображения заднего капсулярного слоя хрусталика в изображении посредством процессора изображений; и
определение содержит этапы, на которых определяют переднюю фазу и переднюю амплитуду сканированного изображения переднего капсулярного слоя и заднюю фазу и заднюю амплитуду сканированного изображения заднего капсулярного слоя и определяют положение и ориентацию хрусталика из передней фазы, передней амплитуды, задней фазы и задней амплитуды.
| US 20090161827 A1, 25.06.2009 | |||
| US 20110118609 A1, 19.05.2011 | |||
| US 20060195076 A1, 31.08.2006 | |||
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ТОЧКИ ЛУЧА ЭКСИМЕРНОГО ЛАЗЕРА | 1999 |
|
RU2162675C2 |

