[0001] Настоящая заявка является продолжением международной патентной заявки № PCT/US20/31392, поданной 5 мая 2020 г., по которой испрашивается приоритет по предварительной заявке США № 62/843,403, «SYSTEMS AND METHODS FOR OCULAR LASER SURGERY AND THERAPEUTIC TREATMENTS», поданной 4 мая 2019 г., содержание и раскрытие каждой из которых в полном объеме включены в настоящую заявку путем отсылки.
[0002] Настоящая заявка относится к объекту, раскрытому в заявке США № 15/942,513 (поданной 3/31/2018), международной заявке № PCT/US18/25608 (поданной 3/31/2018), тайваньской заявке № 108111355 (поданной 3/29/2019), заявке США № 11/376,969 (поданной 03/15/2006), заявке США № 11/850,407 (поданной 09/05/2007), заявке США № 11/938,489 (поданной 11/12/2007), заявке США № 12/958,037 (поданной 12/01/2010), заявке США № 13/342,441 (поданной 01/03/2012), заявке США № 13/709,890 (поданной 12/10/2012), заявке США № 14/526,426 (поданной 10/28/2014), заявке США № 14/861,142 (поданной 09/22/2015), заявке США № 15/365,556 (поданной 11/30/2016), заявке США № 16/599,096 (поданной 10/10/2019), заявке США № 14/213,492 (поданной 03/14/2014), заявке США № 16/258,378 (поданной 01/25/2019), заявке США № 15/638,308 (поданной 06/29/2017), заявке США № 16/702,470 (поданной 12/03/2019), и заявке США № 15/638,346 (поданной 06/29/2017), каждая из которых в полном объеме включена в настоящую заявку путем отсылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Объект изобретения, описанный в настоящей заявке, относится, в общем, к системам, способам, видам терапии и устройствам для лазерной микропорации и, в частности, к системам, способам и устройствам для омоложения ткани глаза методом лазерной глазной микропорации, особенно, в связи со старением соединительной ткани, к омоложению соединительной ткани посредством омоложения глаза или склеры.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0004] Глаз является биомеханической структурой, сложным сенсорным органом, который содержит сложные мышечные, дренажные и жидкостные механизмы, выполняющие функцию зрения и биотранспорта глаза. Аккомодационная система является основной движущей системой в органе зрения, поддерживающей многие физиологические и зрительные функции в глазу. Физиологическая роль аккомодационной системы состоит в том, чтобы перемещать водянистую влагу, кровь, питательные вещества, кислород, двуокись углерода и другие клетки во всем органе зрения. В общем, потеря аккомодационной способности при пресбиопии вызывается многими хрусталиковыми, а также внехрусталиковыми и физиологическими факторами, которые зависят от старения. Повышение ригидности глаза с возрастом создает напряженно-деформированное состояние упомянутых глазных структур и может ухудшить аккомодационную способность, что может повлиять на глаз в виде снижения биомеханической эффективности в отношении физиологических процессов, включающих в себя, как минимум, зрительную аккомодацию, гидродинамику водянистой влаги, гидродинамику стекловидного тела и пульсирующий глазной кровоток. Современные процедуры воздействуют только на оптику некоторыми искусственными средствами, такими как, рефракционная лазерная хирургия, адаптивная оптика или роговичные или интраокулярные имплантаты, которые меняют оптическую силу в одном оптическом элементе глаза и оставляют без внимания другой оптический элемент и значимость сохранения физиологических функций аккомодационного механизма.
[0005] Кроме того, современные устройства-имплантаты в склере получают механический эффект при аккомодации. Они не учитывают эффекты «пор», «микропор» или создания матрицы пор с центрированным шестиугольником или кругом или многоугольником в 3D (3-мерной) ткани. По существу, современные процедуры и устройства не способны восстановить нормальные физиологические функции глаза.
[0006] Соответственно, существует потребность в системах и способах для восстановления нормальных физиологических функций глаза, учитывающих эффекты «пор» или создания сетки или матрицы пор с центрированным шестиугольником или кругом или многоугольником в трехмерной (3D) ткани.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] В настоящей заявке раскрываются системы, устройства и способы для лазерной микропорации с целью омоложения ткани глаза, например, относящиеся к старению соединительной ткани и омоложению соединительной ткани посредством омоложения склеры. Системы, устройства и способы, раскрываемые в настоящей заявке, восстанавливают физиологические функции глаза, включая восстановление физиологической аккомодации или физиологической псевдоаккомодации за счет естественных физиологических и биомеханических явлений, связанных с естественной аккомодацией глаза. В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью воздействия на ткань глаза вне оси или в области глаза, которая не совпадает со зрительной осью или направлена в сторону от зрачка глаза, где находится позиция взгляда глаза.
[0008] В некоторых вариантах осуществления, настоящее изобретение может включать в себя систему для проведения лечения биологической ткани путем микропорации для улучшения биомеханики глаза, при этом система содержит: контроллер; систему лазерной головки, содержащую: корпус, лазерную подсистему для генерации пучка лазерного излучения по оси воздействия, не совмещенной со зрительной осью пациента, выполненную с возможностью применения в процессе подповерхностного абляционного лечебного воздействия с целью создания узора пор, который улучшает биомеханику, и линзу (объектив), выполненную с возможностью фокусировки пучка лазерного излучения на целевую ткань; подсистему слежения за движениями глаза для отслеживания опознавательных точек и движений глаза; подсистему контроля глубины для управления глубиной абляции или микропорации на целевой ткани; и при этом контроллер выполнен с возможностью управления перемещениями лазерной подсистемы, включающими в себя, по меньшей мере, одно из перемещения наклона, перемещения поворота и перемещения отклонения.
[0009] В некоторых вариантах осуществления, система может также включать в себя систему сканирования, коммуникационно связанную с подсистемой слежения за движениями глаза и подсистемой контроля глубины, для сканирования фокальным пятном по зоне целевой ткани. Система может также включать в себя подсистему обхода для идентификации биологических структур или мест глаза и один или более дифракционных делителей пучка.
[0010] В некоторых вариантах осуществления, паттерн (узор) пор может включать в себя поры с одинаковыми размером, формой и глубиной; или узор пор может включать в себя поры с разными размерами, формами и глубинами. Паттерн пор может включать в себя поры, имеющие равное удаление. Паттерн пор может включать в себя поры, имеющие разное удаление, и при этом паттерн пор является, по меньшей мере, плотно упакованным, т.е. с плотным размещением пор друг к другу или мозаично составленным, т.е. в виде регулярного, повторяющегося геометрического рисунка, или размещенным с промежутками.
[0011] Глубина пор может быть пропорциональна суммарной энергии лазера.
[0012] В некоторых вариантах осуществления, настоящее изобретение может включать в себя способ проведения лечения биологической ткани путем микропорации для улучшения биомеханики глаза, содержащий: этап генерации, лазерной подсистемой, терапевтического пучка по оси воздействия, не совмещенной со зрительной осью пациента, в процессе подповерхностного абляционного лечебного воздействия с целью создания узора пор, который улучшает биомеханику; этап контроля, подсистемой слежения за движениями глаза, положения глаза для подведения терапевтического пучка; этап управления, контроллером, перемещением лазерной подсистемы, включающим в себя, по меньшей мере, одно из перемещения наклона, перемещения поворота и перемещения отклонения; и этап фокусировки, линзой, терапевтического пучка на целевую ткань.
[0013] Способ может дополнительно включать в себя этап управления, подсистемой контроля глубины, глубиной абляции или микропорации на целевой ткани; и этап сканирования, системой сканирования, коммуникационно связанной с подсистемой слежения за движениями глаза и подсистемой контроля глубины, фокальным пятном по зоне целевой ткани.
[0014] Другие признаки и преимущества настоящего изобретения являются или будут очевидными специалисту в данной области техники после изучения последующих фигур и подробного описания, которые поясняют на примерах принципы настоящего изобретения.
[0015] Системы, устройства, и способы, подробно описанные в настоящей заявке для лазерной глазной микропорации, являются вариантами осуществления и не должны считаться ограничивающими. Специалистом в данной области техники, после изучения последующих фигур и подробного описания, будут выявлены другие конфигурации, способы, признаки и преимущества объекта изобретения, описанного в настоящей заявке. Предполагается, что все такие дополнительные конфигурации, способы, признаки и преимущества должны входить в объем настоящего описания, находиться в пределах объема объекта изобретения, описанного в настоящей заявке, и охраняться прилагаемой формулой изобретения. Признаки примерных вариантов осуществления ни в коем случае нельзя интерпретировать как ограничивающие прилагаемую формулу изобретения, если в формуле изобретения нет прямого перечисления данных признаков.
КРАТКОЕ ОПИСАНИЕ ФИГУР
[0016] Подробные сведения об объекте изобретения, представленном в настоящей заявке, относительно как его конструкции, так и действия, можно выявить путем изучения прилагаемых фигур, на которых одинаковые цифровые позиции относятся к одинаковым частям. Компоненты на фигурах не обязательно представлены в масштабе, а основное внимание уделяется на иллюстрации принципов объекта изобретения. Далее, все иллюстрации предназначены для сообщения концепций, при этом относительные размеры, формы и другие конкретные характерные признаки могут быть показаны схематично, а не буквально или точно.
[0017] Фиг. 1 - изображение общей анатомии глаза.
[0018] Фиг. 2A-2E - изображения формы глаза и IOP (внутриглазного давления), в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0019] Фиг. 3 - пример задних зон лечения, в соответствии с некоторыми вариантами осуществления настоящее изобретение.
[0020] Фиг. 4, 5A и 5B - изображения примерной ткани, подвергаемой лечению в виде микропорации, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0021] Фиг. 6 - изображения другого примерного способа измерения глубины методом OCT (оптической когерентной томографии) с целью контроля движения глаза между абляционными импульсами, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0022] Фиг. 7-17 - примерные лазерные системы, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0023] Фиг. 18 - примерный способ работы лазерной системы, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0024] Фиг. 19-25 - примерные блок-схемы последовательностей операций лазерной системы, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0025] Фиг. 26 - примерный процесс работы для образования матрицы пор, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0026] Фиг. 27 - другой примерный способ работы для образования матрицы пор, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0027] Фиг. 28 и 29 - примерные лазерные системы с архитектурой FPGA (матрицы логических элементов с эксплуатационным программированием), в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0028] Фиг. 30 - другой примерный процесс работы лазерной системы, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0029] Фиг. 31 - примерная лазерная система с единственным сканирующим зеркалом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0030] Фиг. 32 - примерная лазерная система с возможностью оптимизации параметров импульса, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0031] Фиг. 33 - примерная лазерная система с визуализацией методом OCT/управлением глубиной методом OCT в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0032] Фиг. 34A и 34B - изображения примерных сигналов управления глубиной методом OCT с использованием глаза свиньи, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0033] Фиг. 35A и 35B - примерные измерения методом OCT в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0034] Фиг. 36 - лазерная система, включающая в себя систему управления на основе OCT (OCT-систему управления) для сдвоенных подсистем контроля глубины методом OCT (OCT/DC) и визуализации методом сканирующей OCT, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0035] Фиг. 37 - лазерная система, включающая в себя OCT-систему управления с интегрированными подсистемами OCT/DC и визуализации методом сканирующей OCT, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0036] Фиг. 38-42 - примеры объединенных и/или совместно используемых компонентов в системе OCT, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0037] Фиг. 43A-46 - лазерная система для лечения склеральной ткани, в которой система сканирующей OCT может обеспечивать как 2D сечения, так и 3D изометрическое изображение зоны лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0038] Фиг. 47-49 - изображение примерных процессов отслеживания движений глаза, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0039] Фиг. 50, 51 и 51A - примерные функции, предоставляемые врачу, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0040] Фиг. 52 - изображение примерных зон лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0041] Фиг. 53 - лазерная система, включающая в себя единственное сканирующее зеркало, которое совмещает пучок системы OCT/DC, которым сканируют по поверхности глаза, чтобы отобразить анатомические признаки, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0042] Фиг. 54 - изображение других примерных зон лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0043] Фиг. 55 - изображения примерного положения лечебного воздействия относительно шлеммова канала и анатомического лимба, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0044] Фиг. 56 - система видеокамеры, обеспечивающей изображения для использования с целью отслеживания движения глаза, распознавания черт лица, наведения лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0045] Фиг. 57 - изображение зеркала, которое может быть снабжено электроприводом для перемещения по нескольким осям с целью совмещения поле наблюдаемого изображения с целевыми зонами, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0046] Фиг. 58 - примерные микроскопические изображения с большим увеличением для проверки зоны лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0047] Фиг. 59-61B - лазерная система, включающая в себя видеокамеру, которая может строить изображение зоны лечения и окружающих элементов, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0048] Фиг. 62-66 - изображение примерной матрицы микровырезов, полученной с использованием систем и способов по настоящему изобретению в четырех наклонных квадрантах.
[0049] Фиг. 67 и 68 - изображения зон лечения относительно лимба, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0050] Фиг. 69 - примерные изображения с видеокамеры микроскопического качества с большим увеличением, для проверки зоны лечения относительно лимба, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0051] Фиг. 70 - примерное 3D изображение из камеры TOF (времяпролетной), в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0052] Фиг. 71 и 72 - примерная лазерная система, включающая в себя систему лазерной головки, которая обеспечивает точку фиксации, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0053] Фиг. 73-85 - примерная система лазерной головки, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0054] Фиг. 86 и 87 - примерная лазерная система, использующая дифракционные делители пучков (DBS), в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0055] Фиг. 88 и 89 - примерная система сопряжения с глазом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0056] Фиг. 90 - примерная лазерная система с системой лазерной головки, с которой пациент может находиться в положении сидя, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0057] Фиг. 91-94 - изображения множества форм и положений внеосевых зон лечения вокруг зрительной оси, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0058] Фиг. 95 - примерная картина лечения, описанная в виде 5 критических зон на 5 разных расстояниях от внешнего края анатомического лимба (AL), в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0059] Фиг. 96 - пример передних зон лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0060] Фиг. 97 - другая примерная картина лечения, описанная в виде 5 критических зон на 5 разных расстояниях от внешнего края анатомического лимба (AL), в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0061] Фиг. 98-100 - другие примеры передних зон лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0062] Фиг. 101-104 - другие примеры задних зон лечения, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0063] Фиг. 105-108 - изображения круглых или квадратных пор или пятен другой формы, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0064] Фиг. 109-111 - множество узоров, импульсов, мозаик, форм и размеров как для отдельных микропор, так и матриц из множества пор, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0065] Фиг. 112-115 - примерные эмпирические данные, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0066] Фиг. 116 - примерная гистология микропор, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0067] Фиг. 117-119 - примерные изображения изображений расшивки, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0068] Фиг. 120 - примерная схема устройства наведения лазера для полусферического воздействия, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0069] Фиг. 121-125 - изображения примерных оптических компонентов, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0070] Фиг. 126A, 126В и 127 - примерная лазерная система, выполненная с возможностью лечения склеральной ткани, содержащая единственное сканирующее зеркало, которое объединяет функции управления сканированием OCT и контроля глубины OCT, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0071] Фиг. 128-132 - изображения других примерных оптических компонентов, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0072] Фиг. 133 - лазерная система, включающая в себя стол или кресло пациента, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0073] Фиг. 134 и 135 - лазерная система, включающая в себя подголовник пациента, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0074] Фиг. 136-138 - изображения примерного векорасширителя, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0075] Фиг. 139A и 139B - примерные подповерхностные изображения абляции ткани, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0076] Нижеописанные фигуры иллюстрируют описываемое изобретение и способ применения в, по меньшей мере, одном его предпочтительном наилучшем варианте осуществления, который дополнительно подробно поясняется в последующем описании. Специалисты в данной области техники смогут вносить изменения и модификации в изобретение в том виде, в котором оно описано в настоящей заявке, не выходя за пределы его сущности и объема. Хотя настоящее изобретение допускает вариант осуществления во множестве разных форм, на чертежах показан и в дальнейшем подробно описан предпочтительный вариант осуществления изобретения, с пониманием, что настоящее раскрытие следует считать примером принципов изобретения и не предполагает ограничения широкого аспекта изобретения изображенным вариантом осуществления. Все признаки, элементы, компоненты, функции и этапы, описанные в отношении к любому варианту осуществления, представленному в настоящей заявке, предполагаются свободно сочетаемыми и заменяемыми с таковыми из любого другого варианта осуществления, если не указано иное. Следовательно, следует понимать, что все, что показано, предлагается только с целью примера и не должно считаться ограничением объема настоящего изобретения.
[0077] В общем, системы и способы по настоящему изобретению принимают в расчет сочетание метода заполнения порами и создания матриц пор в трех измерениях (3D). Поры с конкретной глубиной, размером и расположением в матричном 3D-каркасе ткани создают пластические свойства в матрице ткани. Это влияет на биомеханические свойства ткани глаза, например, склеральной ткани, и делает ее более податливой. Как известно, соединительные ткани, которые содержат эластин, являются «податливыми» и должны обладать эластичностью. Фактически, склера обладает естественной вязкоэластичностью.
[0078] Системы, устройства и способы по настоящему изобретению могут включать в себя лазерную микропорацию для омоложения ткани глаза, например, в связи со старением соединительной ткани, и омоложения соединительной ткани посредством омоложения склеры. Системы, устройства и способы, раскрытые в настоящей заявке, восстанавливают физиологические функции глаза, включая восстановление физиологической аккомодации или физиологической псевдоаккомодации за счет естественных физиологических и биомеханических явлений, связанных с естественной аккомодацией глаза.
[0079] В некоторых вариантах осуществления, система может включать в себя дисплей, который входит в состав лазерного модуля, чтобы наблюдать зону ткани, (дисплей врачей), систему управления и защиты (смотри также далее), которая включает в себя блок питания лазера, электронную аппаратуру и платформу управления движением, а также безопасное прямое сопряжение с центральным терминалом. Система может также включать в себя подвижный стол; стол поступательного перемещения, чтобы позиционировать лазер, оптическую систему и сканер в конкретной зоне, при этом лазер и оптическая система могут включать в себя 3-мкм модуль и оптическую систему формирования пучка; систему контроля глубины, чтобы исключить слишком глубокую абляцию; модуль слежения за движениями глаза; средства всасывания и ламинаризации для безопасности оператора. Система может включать в себя отклонение пучка, синхронизированное с отслеживанием движения глаза для образования множества микропор. Другие компоненты и признаки могут включать в себя, например, блок видеокамеры для наблюдения. Центральный терминал может быть интеллектуальным перемещаемым центральным терминалом, который может включать в себя операторский дисплей для управления и безопасности, распределение питания в разные модули, водяное охлаждение лазерной системы, дополнительную ножную педаль, интерфейс связи с внешними устройствами, средства обнаружения и устранения неисправностей, средства обновления и другие возможности, и питание от сети для широкого выбора электропитания, при эксплуатации в разных странах.
[0080] Как упоминалось выше, в некоторых вариантах осуществления, описанные системы, способы и устройства по изобретению могут включать в себя создание конечно-элементной модели аккомодационного механизма, которая включает в себя семь основных путей прохода зонулярных связок и три секции цилиарной мышцы, калибровку и проверку модели посредством сравнения с ранее опубликованными экспериментальными измерениями движения цилиарной мышцы и хрусталика во время аккомодации, и использование модели для исследования влияния зонулярной анатомии и архитектуры цилиарной мышцы на нормальную аккомодационную функцию. Модель может включать в себя геометрию хрусталика и внехрусталиковых структур и новую аккомодацию, приводимую в действие натяжением зонулярных волокон и мышечным сокращением численное моделирование, на основе численного моделирования.
[0081] В некоторых вариантах осуществления, описанные системы, способы и устройства по изобретению могут включать в себя способ изменения биомеханических свойств биологической ткани, использующий комплекс матричных формаций, состоящий из перфораций на упомянутой ткани, в котором конфигурация базируется на математическом алгоритме. Изменение биомеханических свойств биологической ткани зависит от эластичности, амортизации ударов, упругости, механического демпфирования, податливости, жесткости, ригидности, конфигурации, ориентации, деформации, подвижности и/или объема упомянутой ткани. Матричные формации перфораций могут допускать немонотонную зависимость деформации от усилия в упомянутой ткани, при изменении в некотором диапазоне изотропной постоянной упругости в пределах среды. Каждая матричная формация может формировать линейную алгебраическую зависимость между длиной строки и длиной столбца, с каждой перфорацией упомянутой ткани, имеющей непрерывные линейные векторные пространства с производными порядка до N. Где N является бесконечным числом. Комплекс может образовать полную площадь поверхности, при этом каждая перфорация имеет пропорциональное отношение к полной площади поверхности упомянутой ткани. Комплекс можно также расположить так, чтобы обеспечить равновесие усилий, напряжения и деформации и ослабить эффект сдвига между матричными формациями и перфорацией. Каждая перфорация может быть удаленным объемом ткани, который образует точечную сетку на упомянутой ткани, при этом удаленный объем предпочтительно имеет цилиндрическую форму. Матричная формация состоит из мозаичных плиток с повторением или без повторения узора, при этом мозаики являются евклидовыми, неевклидовыми, регулярными, полурегулярными, гиперболическими, параболическими, сферическими или эллиптическими и любыми их комбинациями. Каждая перфорация может иметь линейную связь с другими перфорациями в пределах каждой матричной формации и комплекса матриц по-отдельности. Мозаики прямо или косвенно соотносятся с атомными связями между тканями с деформациями напряжения и сдвига посредством вычисления математического массива координатных векторов между перфорациями. Атомная связь является прогнозируемой зависимостью объема, удаленного каждой перфорацией, с изменением биомеханических свойств, наблюдаемая как элемент математического алгоритма. Прогнозируемая зависимость удаленного объема может быть взаимно исключающей. Мозаики могут быть квадратом, который может подразделяться на мозаику из равноугольных кругов или многоугольников до производной порядка n. В некоторых вариантах осуществления, математический алгоритм использует коэффициент Φ или Phi, чтобы найти наиболее эффективное размещение матриц с целью изменения биомеханических свойств упомянутой ткани. Коэффициент Φ или Phi может быть 1,618 (4 значащих цифры), представляющим любую долю множества стягивающих векторов в сетке, имеющих кратчайшую длину по сравнению с длиной всех остальных векторов. В некоторых вариантах осуществления, математическая зависимость по п. 1 включает в себя нелинейную гиперболическую взаимосвязь между плоскостями биологической ткани и на любой границе или разделении соседних тканей, плоскостей и пространств внутри и снаружи матрицы.
[0082] Различные варианты осуществления лазерной системы описаны в заявке США № 15/942,513 (поданной 3/31/2018), международной заявке № PCT/US18/25608 (поданной 3/31/2018), тайваньской заявке № 108111355 (поданной 3/29/2019), заявке США № 11/376,969 (поданной 03/15/2006), заявке США № 11/850,407 (поданной 09/05/2007), заявке США № 11/938,489 (поданной 11/12/2007), заявке США № 12/958,037 (поданной 12/01/2010), заявке США № 13/342,441 (поданной 01/03/2012), заявке США № 13/709,890 (поданной 12/10/2012), заявке США № 14/526,426 (поданной 10/28/2014), заявке США № 14/861,142 (поданной 09/22/2015), заявке США № 15/365,556 (поданной 11/30/2016), заявке США № 16/599,096 (поданной 10/10/2019), заявке США № 14/213,492 (поданной 03/14/2014), заявке США № 16/258,378 (поданной 01/25/2019), заявке США № 15/638,308 (поданной 06/29/2017), заявке США № 16/702,470 (поданной 12/03/2019), и заявке США № 15/638,346 (поданной 06/29/2017), которые в полном объеме включены в настоящую заявку.
[0083] Влияние ригидности глаза и биомеханики глаза на патогенез возрастной пресобиопии является важным аспектом в настоящей заявке. Описания в настоящей заявке имеют целью модификацию структурной жесткости соединительные ткани глаза, а именно, склеры глаза, с использованием систем и способов по настоящему изобретению.
[0084] ВВЕДЕНИЕ
[0085] Чтобы лучше понять настоящее изобретение, далее кратко описаны аккомодация глаза, ригидность глаза, биомеханика глаза и пресбиопия. В общем, потеря аккомодационной способности при пресбиопии вызывается многими хрусталиковыми, а также внехрусталиковыми и физиологическими факторами, которые зависят от старения. Повышение ригидности глаза с возрастом создает напряженно-деформированное состояние упомянутых глазных структур и может ухудшить аккомодационную способность. В целом, способность понимать влияние биомеханики глаза, ригидности глаза и снижения аккомодации может построить новые парадигмы офтальмологического лечения. Лечение склеры может выполнять важную функцию в лечении биомеханические дефекты при пресбиопии путем обеспечения, по меньшей мере, одного средства решения проблемы действительной этиологии клинического проявления ухудшения аккомодации, обнаруживаемой с возрастом. Эффекты ухудшения аккомодации оказывают влияние на физиологические функции глаза, включая, но без ограничения, зрительную аккомодацию, гидродинамику водянистой влаги, гидродинамику стекловидного тела и пульсирующий глазной кровоток. Применение систем и способов по настоящему изобретению для восстановления большей гибкости биомеханических свойств соединительной ткани глаза является безопасной процедурой и может восстанавливать аккомодационную способность у стареющих взрослых пациентов.
[0086] Аккомодацию традиционно описывали как способность хрусталика глаза динамически изменять оптическую силу, чтобы настраиваться на различные дальности. В последнее время, аккомодация стали более полно описывать как комплексную биомеханическую систему, содержащую как хрусталиковые, так и внехрусталиковые компоненты. Данные компоненты действуют одновременно с многими анатомическими и физиологическими структурами в органе зрения, чтобы организовать не только зрительные проявления, которые происходят при аккомодации, но также физиологические функции, неотъемлемые от органа зрения, например, гидродинамику водянистой влаги и глазной биотранспорт.
[0087] Биомеханика является наукой о происхождении и действиях сил в биологических системах. В офтальмологии недостаточно применяли биомеханику. Данная биомеханическая парадигма заслуживает применения к анатомическим соединительным тканям сложно устроенного органа зрения. Способность понимать биомеханику глаза в том, как она связана с аккомодацией, может обеспечить более полную картину той роли, которую данная основная движущая система выполняет для функции органа зрения в целом, при одновременном сохранении оптического качества для визуальных задач.
[0088] Глаз является биомеханической конструкцией, сложным сенсорным органом, который содержит сложные мышечные, дренажные и жидкостные механизмы, выполняющие функцию зрения и биотранспорта глаза. Аккомодационная система является основной движущей системой в органе зрения, поддерживающей многие физиологические и зрительные функции в глазу. Физиологическая роль аккомодационной системы состоит в том, чтобы перемещать водянистую влагу, кровь, питательные вещества, кислород, двуокись углерода и другие клетки во всем органе зрения. Кроме того, аккомодационная система действует как нейрорефлексный контур, реагирующий на оптическую информацию, принимаемую через роговицу и хрусталик, чтобы точно настраивать фокусирующую силу на протяжении дальности видимости, и является, по существу, «сердцем» органа зрения.
[0089] Фиг. 1 изображает общую анатомию глаза, которая будет полезна описания настоящей заявки. Фиг. 2A-2E изображают форму глаза и IOP.
[0090] Дополнительно биомеханика (в том числе биомеханика глаза), ее решающая роль в патофизиологии органа зрения, физиологической аккомодации в глазу, склеральной хирургии, решающая роль цилиарной мышцы во многих функциях органа зрения, включая аккомодацию и гидродинамику водянистой влаги (отток/приток, регуляция уровня pH и IOP) подробно описаны в заявке США № 15/942,513, тайваньской заявке № 108111355 и международной заявке № PCT/US18/25608, которые в полном объеме включены в настоящую заявку.
[0091] Заявка США № 15/942,513, тайваньская заявка № 108111355 и международная заявка № PCT/US18/25608 дополнительно описывают лазерное омоложение склеры (например, на фиг. 1A-1-1A-7 и в соответствующих их описаниях в заявке США № 15/942,513), роль ригидности глаза (в том числе, «жесткости» внешних глазных структур глаза, включающих в себя склеру и роговицу) в создании помех аккомодационному аппарату. Данные описания в полном объеме включены в настоящую заявку.
[0092] Системы и способы по настоящему изобретению принимают в расчет сочетание метода заполнения порами и создания матриц пор в трех измерениях. Поры со специальными глубиной, размером и расположением в матричном 3D-каркасе ткани создают пластические свойства в матриксе ткани. Это влияет на биомеханические свойства ткани глаза, например, склеральной ткани, и делает ее более податливой. В матричном 3D-каркасе может быть создано множество пор в виде матричной структуры или сетки(ок). Возможна поддержка различных характеристик микропорации. Данные характеристики могут включать в себя объем, глубину, плотность и так далее.
[0093] Следует отметить, что, хотя примеры в настоящей заявке описывают лечение склеральной ткани, система по изобретению может быть также выполнена для лечения других тканей глаза и других тканей.
[0094] Фиг. 4, 5A и 5B изображают микропору и склеру и примеры ткани, подвергаемой лечению в форме микропорации.
[0095] Фиг. 62-66 изображают примерную матрицу микровырезов, полученную с использованием систем и способов по настоящему изобретению в четырех наклонных квадрантах.
[0096] Фиг. 2G в заявке США № 15/942,513 дает примерное графическое представление восстановленной эластичности глаза, уменьшенных сил сопротивления склеры, увеличенных суммарных усилий цилиарного узла и восстановленной динамической аккомодации после лечения.
[0097] Форма матрицы (матричного массива) может быть составлена из множества размеров, величин, форм, геометрий, распределений и площадей. Форма матрицы может быть правильной или неправильной. В некоторых вариантах осуществления может быть выгодным создать круговую, тетраэдрическую или центрированную шестиугольную форму. Для создания центрированного шестиугольника в матрице следует образовать серию «пор» с конкретным составом, глубиной и расположением относительно других «пор» в матрице и ткани, расположенной в пространстве между порами в матрице. Для получения полного эффекта от матрицы в целом, по всем размерам круга или многоугольника необходима также значительная глубина (например, по меньшей мере, 85%) ткани. Матрица внутри ткани содержит круг или многоугольник. Центральный угол круга или многоугольника остается одним и тем же, независимо от множества точек внутри матрицы. Это является важным компонентом систем и способов по настоящему изобретению, поскольку они используют преимущество матрицы с кругом или многоугольником, который включает в себя особенные взаимное расположение и свойства узора пор в матрице или сетке.
[0098] Центральный угол круга или многоугольника является углом, стягиваемым в центре круга или многоугольника одной из его сторон. Независимо от числа сторон круга или многоугольника, центральный угол круга или многоугольника остается одним и тем же.
[0099] Современные устройства-имплантаты в склере получают механический эффект при аккомодации. Никакие современные устройства или способы не учитывают влияния «пор» или образование матрицы пор с центрированным шестиугольником или кругом, или многоугольником в 3D ткани. Системы и способы по настоящему изобретению могут создавать матрицу пор в биологической ткани, чтобы допускать изменение биомеханических свойств самой ткани для оказания механического влияния на биологические функции глаза. В некоторых вариантах осуществления, главное требование к «порам» в матрице может быть круглая или многоугольная форма.
[00100] Круг или многоугольник может по определению иметь любое число сторон, и площадь, периметр и размеры круга или многоугольника в 3 измерениях могут быть математически измерены. В случае правильного круга или многоугольника, центральный угол является углом, образованном в центре круга или многоугольника любыми двумя соседними вершинами круга или многоугольника. Если провести линии из любых двух соседних вершин к центру, то они составили бы центральный угол. Когда круг или многоугольник является правильным, все центральные углы равны. Не имеет значения, которая сторона выбрана. Все центральные углы будут составлять в сумме 360° (полный круг), так что величина центрального угла равна значению 360, деленному на число сторон. Или дается формулой:
Центральный угол=360/n градусов, где n равно числу сторон.
[00101] Таким образом, величина центрального угол зависит только от числа сторон, а не от размера круга или многоугольника.
[00102] В контексте настоящей заявки, круги или многоугольники не ограничены «правильными» или «неправильными». Круги или многоугольники являются одной из большинства всеобъемлющих форм в геометрии. От простого треугольника до квадратов, прямоугольников, трапеций, двенадцатиугольников и фигур с большим числом сторон.
[00103] Дополнительные описания кругов или многоугольников (включая типы и свойства) описаны также, например, в заявке США № 15/942,513 и включены в настоящей заявке.
[00104] Некоторые варианты осуществления в настоящей заявке демонстрируют множество кругов или многоугольников в матрице. Каждый может влиять на результат CT (когерентной томографии). Они могут содержать достаточно пор, чтобы делать возможным «центрированный шестиугольник». Очевидна возможность квадратной/ромбовидной формы. Для нее применима формула:
 , где: s является длиной любой стороны,
, где: s является длиной любой стороны,
которая упрощается до:
 , где: s является длиной любой стороны,
, где: s является длиной любой стороны,
[00105] «Пора», описываемая в настоящей заявке, может иметь специальные очертание, форму, строение и глубину. Пора проходит через 3-мерную ткань, сквозь которую могут проходить газы, жидкости или микроскопические частицы. Поры могут иметь любые размер, форму и могут быть расставлены с некоторым промежутком или могут быть мозаичными. Следует отметить, что, хотя некоторые примеры в настоящей заявке относятся к поре в форме микропоры, термин микропора не предназначен для ограничения и может применяться взаимозаменяемо с термином пора. «Поры», создаваемые по настоящей заявке, могут быть круговыми цилиндрами или цилиндрами квадратного сечения, чтобы препятствовать образованию рубцовой ткани.
[00106] Создание пор в матрице, изменяющей биомеханические свойства соединительной ткани, является характерным признаком настоящего изобретения. Создание различных размеров микропор, которые имеют любые размер, форму, расставлены с некоторым промежутком или размещены мозаично, также является характерным признаком настоящего изобретения.
[00107] «Матрицу пор» по настоящей заявке можно использовать для контроля заживления ран. В некоторых вариантах осуществления, она может включать в себя заполнение порами, чтобы препятствовать образованию рубцовой ткани.
[00108] В некоторых вариантах осуществления, поры могут иметь глубину, по меньшей мере, 5%-95% от глубины соединительной ткани и способствуют созданию планируемого изменения биомеханических свойств. Они могут иметь особое строение, расположение в матрице и, желательно, математически точные характеристики круга или многоугольника. В трехмерном (3D) пространстве, планируемое изменение во взаимном расположении пор в матрице или сетке является отличительной характеристикой настоящего изобретения (смотри, например, фиг. 1F(a)-1F(c) и соответствующие их описания в заявке США 15/942,513). Матрица или решетка может содержать 2-мерную (2D) решетку Браве, 3D решетку Браве или сетку, не являющаяся решеткой Браве.
[00109] Фиг. 1B-1E в заявке США 15/942,513 изображает примерную матрицу пор. Матрицы пор в настоящей заявке являются базовым структурным блоком, из которого можно строить все непрерывные матрицы. Существует множество разных подходов к расположению пор на соединительной ткани в пространстве, в котором каждая точка будет иметь идентичную «атмосферу». То есть, каждая точка будет окружена таким же набором точек, как любая другая точка, и поэтому все точки будут неотличимыми друг от друга. «Матрицу пор» можно отличать по взаимосвязи между углами между сторонами «элементарной поры» и расстоянию между порами и «элементарной порой». «Элементарная пора» является «первой созданной порой» и, при повторении через регулярные интервалы в трех измерениях, будет формировать сетку матрицы, наблюдаемую на поверхности, по глубине ткани. «Параметр сетки» равен длине между двумя точками в углах поры. Каждый из различных параметров сетки обозначен буквами a, b и c. Если две стороны равны, например, в тетрагональной сетке, то длины двух параметров сетки обозначают a и c, при этом b опускают. Углы обозначаются греческими буквами α, β и γ таким образом, что угол с конкретной греческой буквой не опирается на ось с его эквивалентной латинской буквой. Например, α является углом, заключенным между осями b и c.
[00110] Гексагональная структура сетки может иметь два угла, равный 90°, с другим углом (γ), равным 120°. С этой целью, две стороны, заключающие угол 120°, должны быть равными (a=b), а третья сторона (c) находится под углом 90° к другим сторонам и может иметь другую длину.
[00111] Матрица задается как конкретное, повторяющееся расположение пор по всей целевой соединительной ткани, например, склере. Структура относится к внутреннему расположению пор, а не внешнему виду или поверхности матрицы. Однако, они не могут быть совершенно независимыми, так как внешний вид матрицы пор часто зависит от внутреннего расположения. Между каждой из пор в назначенной матрице может быть конкретное расстояние, чтобы соответствовать математическим характеристикам и свойствам круга или многоугольника. Созданные поры также могут иметь взаимосвязь с тканью, остающейся внутри матрицы, что изменяет биомеханические свойства матрицы.
[00112] Пространственные взаимные расположения пор в матрице могут иметь геометрические и математические значения.
[00113] Объемная доля пор вместе с объемной плотностью или пространственной плотностью также может иметь биомеханическое, функциональное, физическое, геометрическое и математическое значения, как показано, по меньшей мере, на фиг. 98 и 99.
[00114] В некоторых вариантах осуществления, система лазерной микропорации по настоящему изобретению может, в общем включать в себя, по меньшей мере, следующие параметры: 1) лазерное излучение с интегральной плотностью потока от, приблизительно, 1-3 мкДжоулей/см2 до, приблизительно, 2 Джоулей/см2; ≥15,0 Дж/см2 на ткани; ≥25,0 Дж/см2 на ткани; мощность лазера 0,1-2,5 Вт для расширения возможностей лечения, 2900 нм±200 нм; около максимума поглощения воды в среднем ИК диапазоне спектра; частота повторения и длительность лазерных импульсов может быть настраиваемой с использованием предварительно заданных сочетаний в диапазоне 100-1000 Гц и 50-225 мкс. Приведенный диапазон можно рассматривать как минимальный диапазон для ≥15,0 Дж/см2 на ткани; ≥25,0 Дж/см2 на ткани; для расширения возможностей лечения; 2) облучение с использованием одного или более лазерных импульсов или последовательности импульсов, имеющих длительность от, приблизительно, 1 нс до, приблизительно, 20 мкс. Некоторые варианты осуществления могут, в принципе, иметь мощность до 50 Вт; 3) предпочтительный диапазон зоны теплового повреждения (TDZ) может быть меньше 20 мкм в некоторых вариантах осуществления или 20-50 мкм в некоторых вариантах осуществления; 4) возможно также включение параметров ширины импульса от 10мкм до 600 мкм.
[00115] Энергия в импульсе 1-3 микроДжоулей может обеспечиваться фемтосекундными лазерами и пикосекундными лазерами с высокими частотами повторения импульсов, например, от 500 Гц (Zeiss) до нескольких килогерц (Optimedica). Преимуществами фемтосекундных лазеров и пикосекундных лазеров являются небольшие размеры пятен (например, 20 микрометров и до 50 микрометров), и плотности энергии являются высокими для снижения до минимума теплового повреждения окружающих тканей. Все вышеизложенное может приводить к эффективному омоложению склеры. В некоторых вариантах осуществления, лазеры могут образовать поры, по существу, круглой и конической формы в склере с глубиной вплоть до перфорации склеры и тепловым повреждением от, приблизительно, 25 мкм до, приблизительно, 90 мкм. Глубина пор может регулироваться энергией импульса и числом импульсов. Диаметр пор может изменяться артефактами движения и/или дефокусировкой. Тепловое повреждение может быть связано с числом импульсов. Энергию импульса можно повышать, что может приводить к уменьшению числа импульсов и, в связи с этим, к дополнительному уменьшению теплового повреждения. Повышение энергии импульса может также сокращать время облучения. Примерная конструкция описанной лазерной системы может обеспечить совокупность параметров лазера, оптимизированную для уменьшения зоны теплового повреждения, при сохранении времени облучения и обеспечении, тем самым, высокой скорости для оптимизации времени лечения, и технологическую карту, представляющую взаимосвязь между зоной теплового повреждения и импульсом (смотри, например, фиг. 1E-2 и фиг. 1G-1-1G-4 и соответствующие их описания в заявке США 15/942,513).
[00116] В некоторых вариантах осуществления, длительность импульса и ширину импульса можно изменять по данным адаптивной OCT, с уменьшением до точной настройки на целевую предварительно заданную глубину.
[00117] Наносекундные лазеры для микропорации или микротуннелирования, в некоторых вариантах осуществления, могут включать в себя следующие технические характеристики: длины волн в УФ-видимой-коротковолновой инфракрасной областях, обычно, 350-355 нм; 520-532 нм; 1030-1064 нм; длительности импульсов 0,1-500 наносекунд, с пассивной (или активной модуляцией добротности); частоты повторения импульсов от 10 Гц до 100 кГц; пиковые энергии 0,01-10 миллиДжоулей; максимальные пиковые мощности свыше 10 Мегаватт; пучок, распространяющийся свободно или по волокну.
[00118] Омоложение склеры можно выполнять с использованием фемтосекундных или пикосекундных лазеров и эрбиевого лазера на иттрий-алюминиевом гранате (Er:YAG-лазера). Другие предпочтительные варианты осуществления могут включать в себя параметры энергии лазера, идеально подходящие для 2,94-мкм Er:YAG-лазера, или другие возможности лазера с предпочтительной энергией Er:YAG-лазера, или другие лазеры с разными длинами волн с высоким поглощением водой.
[00119] Энергии в миллиДжоулях и плотности энергии для разных размеров/форм пятен/пор могут включать в себя:
[00120] Размер пятна 50 микрометров: a) 0,5 мДжоулей в импульсе составляют 25 Джоулей/см2; b) 1,0 мДжоулей в импульсе составляет 50 Джоулей/см2 (возможно, с Er:YAG-лазером); 3) 2,0 мДжоулей в импульсе составляют 100 Джоулей/см2.
[00121] Размер пятна 100 микрометров (все данные характеристики возможны с Er:YAG-лазером): a) 2,0 мДжоулей в импульсе составляют 25 Джоулей/см2; b) 5,0 мДжоулей в импульсе составляют 62,5 Джоулей/см2; c) 9,0 мДжоулей в импульсе составляют 112,5 Джоулей/см2.
[00122] Размер пятна 200 микрометров: a) 2,0 мДжоулей в импульсе составляют 6,8 Джоулей/см2; b) 9,0 мДжоулей в импульсе составляют 28,6 Джоулей/см2; c) 20,0 мДжоулей в импульсе составляют 63,7 Джоулей/см2.
[00123] Размер пятна 300 микрометров: a) 9,0 мДжоулей в импульсе составляют 12,8 Джоулей/см2, возможно с Er:YAG-лазером; b) 20,0 мДжоулей в импульсе составляют 28 Джоулей/см2, возможно с лазером DPM-25/30/40/X; c) 30,0 мДжоулей в импульсе составляют 42,8 Джоулей/см2; d) 40,0 мДжоулей в импульсе составляют 57 Джоулей/см2; e) 50,0 мДжоулей в импульсе составляют 71 Джоулей/см2.
[00124] Размер пятна 400 микрометров: a) 20 мДжоулей в импульсе составляют 16 Джоулей/см2, с лазером DPM-25/30/40/50/X; b) 30 мДжоулей в импульсе составляют 24 Джоулей/см2; c) 40 мДжоулей в импульсе составляют 32 Джоулей/см2; d) 50 мДжоулей в импульсе составляют 40 Джоулей/см2.
[00125] Следует отметить, что возможны также круглые или квадратные поры или поры другой формы. Смотри, например, фиг. 105, 106, 107 и 108. Данные поры, пересекающие 3-мерные соединительные ткани на специальную требуемую глубину, могут давать, в результате, множество цилиндров с множеством форм, включая, но без ограничения, круговые цилиндры, цилиндры квадратного сечения, цилиндры многоугольного сечения или цилиндрами с конически изменяющимся сечением. Имеются сведения, которые доказывают, что возможности по глубине проникания, распространению, дифференциации и миграции пор зависят от размера, формы и геометрии пор каркаса. Поскольку как вязкоэластичность, так и проницаемость зависят от пористости, ориентации, размера, распределения и взаимной связности пор, то существуют некоторые размеры пор, которые могут быть более совершенными, чем другие размеры, в зависимости от клинической цели формирования пор. Система обладает возможностью гибко изменять оптическую схему для получения множества параметров пор и матриц. Дополнительно, нижние части пор могут иметь коническую или плоскую нижние поверхности в зависимости от оптической схемы. Дополнительные стороны пор могут формировать разные формы (например, цилиндры или конусы) в зависимости от оптической схемы. В некоторых вариантах осуществления, как показано, по меньшей мере, на фиг. 86 и 87, система может использовать дифракционные делители пучка (DBS), чтобы изменять форму и размер пучка, следовательно, поры.
[00126] В случае с фемто- и пикосекундными лазерами, некоторые доступные длины волн включают в себя ИК длину волны 1030 нм; зеленую длину волны 512 нм и УФ длину волны 343 нм. Пиковые энергии могут изменяться от нескольких наноДжоулей (с мегагерцовой частотой повторения импульсов) до 5-50 микроДжоулей и вплоть до нескольких сотен микроДжоулей в пикосекундной области. Фемтосекундные лазеры имеют длительность импульсов 100-900 фемтосекунд; пиковые энергии от нескольких наноДжоулей до нескольких сотен микроДжоулей, частоты повторения импульсов от 500 Гц до нескольких Мегагерц (можно применить лазер Ziemer LOV Z; Ziemer AG, Швейцария: с пиковыми энергиями, равными нескольким наноДжоулям и частотой повторения импульсов свыше 5 МГц, с очень высоким качеством/плотностью пучка, фокусирующегося в небольшое пятно с размером 50 микрометров и меньше).
[00127] Лучшие фемтосекундные лазеры имеют такое высокое качество пучка, что, в некоторых вариантах осуществления, посредством фемтосекундных лазеров можно обеспечивать микротуннелирование склеры в виде микропор, с использованием эрбиевых лазеров.
[00128] В контексте настоящей заявке, ядерные поры можно определить как отверстия в оболочке ядра, с диаметром около 10 нм, через которые должны проходить молекулы (например, ядерных белков, синтезируемых в цитоплазме) и РНК (смотри, например, фиг. 1H и его соответствующие описания в заявке США 15/942,513). Поры образуются крупным белковым скоплением. Перфорации в ядерной мембране могут допускать протекание выбранных материалов внутрь и наружу.
[00129] Формула для пористости в биологической ткани может быть задана в виде: X(Xa, t)=qT”(X”,t)=x*+u”(X”,t), где qT” является непрерывно-дифференцируемым, обратимым отображением от 0 до a, и u” является cY-составляющей смещения. Градиент обратимого отображения для a-составляющей (F”) и ее Якобиан(Jacobian) (J”) может быть задан в виде J”=detF”, где J” должен быть строго положительным, чтобы препятствовать взаимному проникновению каждого континуума. Правый тензор Коши-Грина V и его обратное преобразование, тензор деформации Пиола B для твердой составляющей могут быть заданы в виде V=  , B=
, B=  , где верхний индекс t означает транспозицию.
, где верхний индекс t означает транспозицию.
[00130] Современные теоретические и экспериментальные данные предполагают, что создание или поддерживание пор в соединительной ткани решает три важные задачи. Во-первых, транспорт питательных веществ в клетки в матриксе соединительной ткани. В-вторых, унос клеточных отходов. В-третьих, тканевая жидкость прилагает усилие к стенке склеры или внешней оболочке глаза, при этом усилие является достаточно большим, чтобы его ощущали клетки. Полагают, что этот процесс является основным механизмом механотрансдукции в соединительной ткани, то тем, как оболочка глаза воспринимает механическую нагрузку, которой она подвергается, и реагирует на повышение внутриглазного давления. Понимание глазной механотрансдукции имеет принципиальное значение для понимания того, как лечить внутриглазную гипертензию, глаукому и миопию. Кроме того, пористость или пространственная плотность материала или ткани изменяет ее физические и биомеханические свойства, например, пластичность, эластичность, усилие сдвига, напряжение, растяжение, капиллярную утечку жидкости, деформацию и изменение формы). Поскольку цилиарные мышцы аккомодации являются главными агонистами усилий как в динамике сил, так и в гидродинамике в глазу, то биомеханика внешней оболочки глаза имеет решающее значение для того, чтобы поддерживать или сдерживать создание усилий для необходимых функций органа зрения, включая, но без ограничения, восстановление тканей, механику аккомодации, регуляцию внутриглазного давления и гидродинамику внутри глаза. Поскольку прогрессирующий возрастной кросслинкинг влияет на биомеханическую жесткость или амортизирующие свойства соединительных тканей глаза, то фактор регулирования пористости или объемной плотности состарившихся тканей глаза может обеспечить органичное решение восстановления или омоложения динамических функций внутри глаза, без применения имплантируемых устройств устройства или лекарств. Изменение биомеханических свойств ткани посредством микропорации может также улучшить биомеханический отклик тканей на нагрузку и омолодить ткани.
[00131] Вывод физических свойств пористой среды (например, гидравлической проводимости, теплопроводности, кривой задержания воды) из параметров, описывающих структуру среды, (например, пористости, распределения размеров пор, удельной площади поверхности, объемной плотности или пространственной плотности пор) остается проблемой для ученых в случае с мягкими тканями или пористостями костной ткани и их проницаемости. Система может включать в себя способность использовать несколько узоров, импульсов (смотри, например, фиг. 109, 110 и 111), мозаик, форм (не обязательно ограниченных круглой, прямоугольной, квадратной) и размеров как отдельных микропор, так и матриц из множества пор. Глубина поры проявляет тенденцию к увеличению с увеличением энергии, и ширина поры изменяется не с подведением нескольких импульсов, но с использованием дифракционного делителя пучка (например, DBS) для получения заданных формы, размера и схемы пор. Для проверки предположения, что пористая среда имеет характеристику самоподобного масштабирования, фрактальные размерности различных признаков определили экспериментально in vitro для глазного яблока животных и человека и in vivo для человеческих глаз. Как показано на фиг. 112, 113, 114 и 115, упомянутые эмпирические данные представляют ожидаемое доказательство того, что повышение плотности или пространственной плотности (объемной плотности) пор усиливает биомеханические эффекты от пластичности, капиллярной утечки жидкости и деформации, что имеет следствием улучшение остроты зрения, объясняемой увеличением аккомодационных усилий.
[00132] Система может содержать способность обеспечивать управление глубиной абляции и возможность предупреждения/управления, которая может надежно определять глубину абляции ткани и, в конецном счете, границу раздела между склерой и сосудистой оболочкой и эффективно предотвращать абляцию за склерой, пригодность системы с эргономической и клинической точки зрения, а также для применения врачом, высокую надежность и средства управления, гарантирующие безопасность пациента и воспроизводимость процедуры, возможность сканирования с увеличенным рабочим расстоянием для высокоскоростного выполнения процедуры.
[00133] В некоторых вариантах осуществления, системы по настоящему изобретению могут использовать импульсный твердотельный 2,94-мкм Er:YAG-лазер с диодной накачкой (DPSS) и модуляцией добротности, совместно с ручным зондом, чтобы выполнять абляцию пор в склере для модификации пластичности области склеры, при лечении пресбиопии и других дисфункций глаза.
[00134] АРХИТЕКТУРЫ СИСТЕМЫ
[00135] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью воздействия на ткань глаза, например, склеральную ткань, при этом врачу представляются изображение протокола лечения с дополненной реальностью, высокоразрешающее изображение глаза пациента, полученное видеокамерой, предполагаемые места лечения микропорами и картины лечения, размещенные вокруг лимба, обход сосудов и отслеживание движения глаза, причем все это представляется средствами графического пользовательского интерфейса (GUI) и искусственного интеллекта (ИИ), чтобы способствовать оптимальному лечению. Как показано на фиг. 61A, 61B, 50, 51, 51A и 63 и дополнительно описано далее, система может предлагать врачу возможность сдвигать место лечения на глазу пациента в изображении видеокамеры. Система может позволить врачу повернуть изображение лечебного воздействия и просмотреть изменение. Система может позволить врачу выбрать отдельные микропоры в картине лечения, которые нельзя формировать, исходя из наблюдаемого врачом изображения сосудистой структуры глаза пациента. После лечебного воздействия, система может представить врачу изображение, которое подтверждает целевую глубину микропор, также с возможностью наблюдения 2D и 3D изображения OCT (полученные методом оптической когерентной томографии), чтобы проверять правильность пор по каждому протоколу лечения. Затем система может предложить врачу возможность повторно обработать отдельные поры, при необходимости, на втором этапе лечебного воздействия. Система визуализации может собрать множество биометрических данных и затем реконструировать точную 3D модель реальной анатомии каждой матрицы лечебного действия, включающей в себя каждую микропорацию, с использованием OCT и технологии дополненной реальности (AR). Система может позволить врачу или пользователю точно визуализировать, где на поверхности и под поверхностью глаза находятся соответствующие анатомические структуры, сквозь целевую ткань, а также импульс по вызванным импульсом морфологическим изменениям ткани и внутри микропоры. Система видеокамеры может быть способна формировать точное высокоразрешающее изображение, которое точно измеряет и четко визуализирует 3D изображения целевых тканей матрицы микропор до и после лечебного воздействия. С использованием биометрических данных, измеренных по осям x, y и z, система может быть способна совмещать слои лечебного воздействия сценариев дополненной реальности для множества возможных лечебных воздействий. Такая мультимедийная платформа позволяет врачу принимать грамотные решения по лечению и вносить изменения с учетом индивидуальной анатомии каждого человека.
[00136] Фиг. 7, 8, 9, 10, 11, 12, 13, 14, 15, 16 и 17 представляют примерные варианты осуществления лазерной системы по настоящему изобретению. В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, в которой система может создавать микропоры посредством нескольких импульсов лазерного излучения, чтобы ограничивать повреждение ткани, управлять конечной глубиной микропоры и сокращать время лечебного воздействия для каждой микропоры, исходя из вариаций толщины склеральной ткани.
[00137] Фиг. 7 представляет примерную лазерную систему без зеркальной гальванометрической системы, 5-осевой головки и отдельного движения по оси Z. Фиг. 8 представляет примерную лазерную систему с управлением лазерной головкой без зеркальной гальванометрической системы, 5-осевой головкой и отдельным движением по оси Z. Фиг. 9 представляет примерную лазерную систему с подголовником, движением по оси Z лазерной головки. Фиг. 10 представляет примерную лазерную систему с гальванометрическими зеркалами, отдельным лазером видимого диапазона и оптическими волокнами системы контроля глубины методом OCT (волокнами системы OCT/DC), совмещенными на оси лечебного лазера, и системой врачебного наблюдения лечения. Фиг. 11 представляет примерную лазерную систему, которая сочетает систему OCT/DC и лазер видимого диапазона на одном волокне и совместно используемые промежуточные линзы с лечебным лазером и системой управления и отображения. Фиг. 12 представляет примерную лазерную систему, которая является, по существу, аналогичной системе на фиг. 11, но включает в себя линзу(объектив) с автофокусировкой (AF) и двухфункциональную cистему OCT. Фиг. 13 представляет примерную лазерную систему, которая является, по существу, аналогичной системе на фиг. 12, но не содержит зеркальной гальванометрической системы, 5-осевой головки и отдельного движения по оси Z. Фиг. 14 представляет примерную лазерную систему, которая является, по существу, аналогичной системе на фиг. 13, но не содержит гальванометрических зеркал, содержит 6-ю ось линзы с автофокусировкой. Фиг. 16 представляет примерную лазерную систему с OCT-системой управления, контролирующую глубину с помощью включенного в состав лазера видимого диапазона. Фиг. 15 и 17 представляют примерную лазерную систему с управлением системой биологической обратной связи (OCT и/или видеокамера).
[00138] Как показано на фиг. 36, в некоторых вариантах осуществления, лазерная система может включать в себя OCT-систему управления для сдвоенных подсистем OCT/DC и сканирующей OCT.
[00139] Как показано на фиг. 37, в некоторых вариантах осуществления, лазерная система может включать в себя OCT-систему управления, совмещенную с подсистемами визуализации OCT/DC и сканирующей OCT.
[00140] Как показано на фиг. 84, в некоторых вариантах осуществления, лазерная система может включать в себя лазерную подсистему лазерного лечения в сочетании с оптоволоконной подсистемой OCT/DC. Данное сочетание может быть центральным компонентом устройства 5-осевого управления движением, которое перемещается для нацеливания лазерного пучка.
[00141] Фиг. 77 и 80A-83 изображают примерную систему лазерного лечения, работающую по принципу внеосевого лечебного воздействия.
[00142] Варианты осуществления и признаки лазерной системы дополнительно подробно описаны в заявке США № 15/942,513, тайваньской заявке № 108111355 и международной заявке № PCT/US18/25608, которые в полном объеме включены в настоящую заявку. Например, как показано на фиг. 6 заявки США № 15/942,513, лазерная система может включать в себя лазер, волокно для подведения лазерного излучения, систему управления лазером, систему контроля и систему управления пучком. В другом примере, на фиг. 7 заявки США № 15/942,513, лазерная система может также включать в себя подсистему контроля глубины, гальванометрические зеркала, видеокамеру (например, ПЗС-камеру или подходящую видеокамеру), микроскоп для визуального наблюдения, подсистему фокусировки и оптическую систему подведения пучка. Фиг. 7-1 заявки США № 15/942,513 изображает примерную лазерную систему, содержащую возможности осевой и внеосевой визуализацию, и подсистему измерения глубины. Другие примерные варианты осуществления включают в себя лазерную систему с дихроичной оптикой (на фиг. 3A заявки США № 15/942,513), лазерную систему с подсистемой слежения за движениями глаза, расположенной после гальванометрических зеркал (на фиг. 3A заявки США № 15/942,513).
[00143] В некоторых вариантах осуществления, настоящее изобретение может включать в себя способ проведения лечения путем микропорации для улучшения биомеханики. Способ может включать в себя этап генерации, лазером, терапевтического пучка по оси воздействия, не совмещенной со зрительной осью пациента, в процессе подповерхностного лазерного лечебного воздействия с целью создания упорядоченной совокупности микропор, которая улучшает биомеханику; этап управления, посредством контроллера электрически связанного с лазером, дозой терапевтического пучка для облучения целевой ткани; этап фокусировки, линзой, терапевтического пучок на целевую ткань; этап контроля, посредством автоматического внеосевого (лазерное лечение не совпадает со зрачком или линией взгляда) отслеживания и измерения подповерхностных анатомических структур и системой обхода, положения глаза для подведения терапевтического пучка; и при этом матричная структура микропор имеет, по меньшей мере, один из радиального узора(паттерна), спирального узора, филлотактического узора или асимметричного узора.
[00144] В некоторых вариантах осуществления, настоящее изобретение может включать в себя систему лазерной хирургии и терапевтического лечения глаза, которая может обеспечивать процесс лазерной терапии глаза с целью частичного снятия напряжений и деформаций, который возникают с возрастом во все более ригидной склере путем придания эластичности склеральной ткани с помощью матрицы микропор, образованных лазером в склеральной ткани либо с промежутками, либо мозаикой. Система может способствовать изменениям биомеханических свойств склеры, уменьшать компрессию подсознательно реагирующей соединительной ткани, фасциальной ткани и биофизиологических структур глаза, а также восстанавливать нарушенные аккомодационную способность и гидродинамическую функцию глаза. Система может снижать напряжение и улучшать биомеханическую эластичность цилиарной мышцы, аккомодационного комплекса, отток водянистой влаги и ключевые физиологические анатомические функции, которые находятся прямо под склеральной тканью. На возрастной кросслинкинг, который вызывает повышение биомеханической жесткости, можно прямо или косвенно воздействовать посредством создания пор, расшивающих коллагеновые фибриллы в иерархической структуре тканей, с созданием более гибкой и эластичной соединительной ткани после лечения. Например, при применении микропорации для повышения биомеханической эластичности в склеральной ткани, можно обеспечить создание большего усилия, прилагаемого к хрусталику для выполнения аккомодационной функции. Фиг. 116 представляет примерную гистологию микропор. Гистологические срезы с окраской гематоксилином и эозином (H and E) (основными красителями тканей, применяемыми в гистологии) для групп с только лазерным лечением (L) и лазерным лечением плюс лечением коллагеном (L+C) в разные моменты времени показывают, что во всех глазах имели место инфильтрация воспаления и коагуляционный некроз (стрелки) через 1 месяц, и данные реакции проходили со временем. Через 9 месяцев ни клеток воспаления, ни некроза не наблюдалось, и склеральные микропоры были еще открытыми и заполняемыми фибробластами. Значок * обозначает склеральные микропоры. TN обозначает ткань теноновой капсулы. Исходное увеличение составляло 100 крат. Масштабный отрезок равен 200 мкм.
[00145] В дальнейшем приведено подробное описание вариантов осуществления лазерной системы.
[00146] Последовательность действий, производительность и безопасность
[00147] В некоторых вариантах осуществления, как показано на фиг. 19 и 20, 21, 22, 23, 24 и 25, лазерная система может быть выполнена с возможностью лечения склеральной ткани путем выполнения последовательности действий, которая может включать предварительно полученные данные пациента и операции вплоть до послелечебных контрольных изображений, полученных методом OCT, (OCT-изображений).
[00148] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани путем выполнения индивидуально выбранной последовательности действий, чтобы сформировать множество микропор в нескольких квадрантах в обоих глазах. Фиг. 26, 19 и 20 и 27 представляют примерные процессы для формирования массива пор.
[00149] В некоторых вариантах осуществления, как показано на фиг. 28 и 29, лазерная система может включать в себя архитектуру FPGA (матрицы логических элементов с эксплуатационным программированием), чтобы управлять временем критических процессов, процессов обеспечения безопасности и обработкой изображений/данных.
[00150] В некоторых вариантах осуществления, лазерная система может включать в себя средство ввода плана предварительного лечения для сокращения продолжительности лечения, например, посредством создания файла ini.file для загрузки и настройки системы прежде, чем пациент врач с системой будут готовы начать лечение.
[00151] В некоторых вариантах осуществления, лазерная система может включать в себя средство приема данных ввода планирования лечения на основании множества источников, например, предыдущих медицинских карт пациентов, предыдущих протоколов лечения склеры, предпочтений врача, скорректированных оптимизаций лечения и сканированных изображений, полученных системой до лечения). Как показано на фиг. 28 и 29, получение системой сканированных изображений до лечения может включать в себя использование видеокамеры, отслеживание движения глаза, распознавание признаков, OCT-изображений с целью составления плана лечения или определения годности пациента для лечения склеры.
[00152] В некоторых вариантах осуществления, лазерная система может включать в себя средство дистанционного лечения. В примере, управление системой может осуществляться врачом дистанционно, с присутствием на месте лечения подготовленного техника, посредством проведения дистанционного GUI-сеанса по интернет-соединению с использованием или без устройства Bluetooth. Врач находится удаленно и входит в систему через защищенное интернет-соединение с использованием виртуальной защищенной сети (VPN) и зашифрованного пароля. Контрольная(ые) видеокамера(ы) на лазерной головке, направленные на пациента, связаны видеосоединением с техником и врачом. Техник на месте лечения позиционирует пациента и устанавливает векорасширитель (смотри фиг. 136-138). Техник может ввести индивидуальный пароль от врача. Врач может выполнять все нормальные функции, но врачу может потребоваться предварительное включение лазерной функции. Техник на месте лечения выполняет нормальное включение и нажимает педаль по командам врача. Врач снабжен аварийным выключателем. В некоторых вариантах осуществления, техник на месте лечения может выполнять все лечение, и врач наблюдает изображения дистанционно.
[00153] В некоторых вариантах осуществления, лазерная система может включать в себя средство для дистанционного контроля работы системы, передачи файлов данных, передачи файлов протоколов, загрузки нового программного обеспечения, загрузки в главную систему важнейших протоколов лечения, проведения дистанционных обслуживания и калибровок. В некоторых вариантах осуществления, данные функции могут выполняться с поддержкой на месте лечения или без нее и с использованием электронного интерфейса со службами вне места лечения.
[00154] OCT/Контроль глубины (DC)
[00155] Фиг. 30, 6 и 18 представляют примерный способ работы вариантов осуществления лазерной системы с управлением на основе биологической обратной связи.
[00156] В некоторых вариантах осуществления, система может использовать единственный стационарный пучок от системы OCT для контроля глубины, которая коллинеарна с лечебным лазером.
[00157] В некоторых вариантах осуществления, глубину микропоры можно оценить с использованием измерений методом OCT между импульсами, чтобы определить текущую глубину на основании определения поверхности на дне каждой микропоры и нижней поверхности склеры. Возможно также определение верхней поверхности склеры и ее использование при определении глубины поры. При необходимости, выполняется изменение глубины последнего импульса и остаточной толщины склеры и, затем, определение оптимальной длины (длительности) импульса для следующего импульса. Вышеописанное может выполняться автоматически и в реальном времени.
[00158] В некоторых вариантах осуществления, как показано на фиг. 27, процесс адаптивной регулировки глубины может формировать первоначальные длительные импульсы, которые можно использовать для сокращения общего числа импульсов и суммарного времени, необходимого для выполнения микропоры до целевого размера глубины, и снижения вероятности перемещения глаза пациента во время выполнения одной микропоры. Укороченные импульсы можно использовать для обеспечения «наводки» системы на целевую глубину целевой микропоры.
[00159] Процесс, показанный на фиг. 27 может включать в себя условие для случая, когда считанные данные OCT оказываются меньше ожидаемых, что указывает на перемещение глаза во время создания поры. Данный процесс повторяется для каждого импульса, чтобы вычислить оптимальную ширину следующего импульса. В некоторых вариантах осуществления, глубину поры можно сравнивать с ожидаемым диапазоном значений, и, если глубина оказывается значительно меньше ожидаемой, то это может указывать, что глаз переместился, или система переместилась или поколебалась, что изменило наводку лазера. Система может быстро представить показание перемещения глаза до того, как начинается следующий импульс, с обеспечением показателя безопасности и формированием ошибки, передаваемой в системный контроллер. Если перемещение является небольшим, то процесс абляции для следующей поры можно продолжить, но, если перемещение определяется досточно большим, чтобы считаться значимым, то процесс формирования поры может быть прекращен или приостановлен на время, пока система слежения за движениями глаза не переустановит наводку лазера, чтобы безопасно продолжить процесс формирования поры. В некоторых вариантах осуществления, система может быть способна совмещать каждый импульс каждой поры, чтобы снова начинать микропорацию в правильной поровой ячейке после того, как повторно начинается лечебное воздействие.
[00160] Как показано на фиг. 16, в некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, с применением OCT-системы управления с контролем глубины, содержащей лазер видимого диапазона (называемый также пилотным пучком).
[00161] Как показано на фиг. 31, в некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, при наличии единственного сканирующего зеркала, которое совмещает пучок OCT, которым сканируют по поверхности глаза, чтобы обеспечить изображение микропор в любой точке во время лечения.
[00162] В некоторых вариантах осуществления, система может использовать единственный стационарный пучок из системы OCT для контроля глубины, который является коллинеарным с лечебным лазером.
[00163] В некоторых вариантах осуществления, как показано на фиг. 109, можно показать, что глубина поры пропорциональна суммарной энергии лазера, независимо от числа импульсов, используемых для получения глубины поры.
[00164] В некоторых вариантах осуществления, как показано на фиг. 110 и 111, можно показать, что на диаметр поры не влияет сколько-нибудь значительно число импульсов, используемых для получения глубины поры.
[00165] В некоторых вариантах осуществления, как показано на фиг. 32, система (например, показанная, по меньшей мере, на фиг. 7, 8, 17 и 30) может включать в себя возможность оптимизации параметров импульсов, чтобы обеспечить глубину оптического импульса между импульсами, допускающую расчет объема удаления ткани на один импульс для предварительного планирования и достижения целевой конечной глубины и удаления объема. Система может совмещать пучки OCT и лазера в одном пучке, что допускает наблюдение отдельной микропоры вместе с контролем глубины. Система может включать в себя возможность использования сигналов DC системы OCT, чтобы определять положение фокусировки лечебного лазера с целью получения оптимальных характеристик микропоры. Система может включать в себя систему OCT, которая коллинеарна с абляционным лазером и служит для идентификации границы раздела воздуха со склерой пациента. Лечебный лазер может быть настроен на ту же фокальную точку на оси Z, что и лазер OCT. На этой основе, «фокус» всей системы можно настраивать, и по сигналу обратной связи из системы OCT можно контролировать, что фокус лазера находится на склере пациента.
[00166] В некоторых вариантах осуществления, как показано, по меньшей мере, на фиг. 27, глубину микропоры можно измерять внутри микропоры посредством подсистемы DC наклонной системы OCT; при этом измерение можно выполнять одним пучком, коллинеарным терапевтическому пучку, имеющим немного меньший диаметр пучка. Отраженный сигнал может быть обработан алгоритмом обработки сигналов для определения глубины до и после лазерных импульсов, чтобы обеспечить глубину микропоры, и система может отменить следующий лазерный импульс в случае необходимости. В некоторых вариантах осуществления, энергию импульса для получения глубины можно вычислить прямо через внешние слои глаза и использовать для назначения энергии (ширины) следующего импульса, чтобы закончить процесс на искомой глубине за минимальное число импульсов.
[00167] В некоторых вариантах осуществления, измерение глубины можно выполнять для каждой микропоры, чтобы обеспечить абляцию, не превышающую пределы плана лечения и не превосходящую минимальную остаточную толщину склеры в целях безопасности, и определять остаточную глубину микропоры, подлежащей абляции. В некоторых вариантах осуществления, как показано на фиг. 33 (а также на фиг. 7, 8, 17 и 30), система может включать в себя средства визуализации методом OCT/контроля глубины методом OCT с использованием данных, собранных для глубины абляции микропоры за один импульс и суммарной глубины, обеспечиваемой для окончательной проверки методом OCT и верификации протокола лечения. Система может включать в себя систему OCT, коллинеарную с лечебным лазером, которая может измерять и записывать значения после каждого импульса перед следующим импульсом в ходе микропорации. Это возможно на основе настройки пучка OCT до диаметра, равного или меньшего, чем микропора (пора) от лечебного лазера, вследствие чего сигнал является чистым и достоверным и допускает быстрое использование без многочисленных замеров. Переключающаяся оптическая система OCT (с фиксированным или плавно изменяемым фокусным расстоянием) может уменьшать диаметр пучка OCT/DC до значения меньше, чем диаметр микропоры, чтобы система OCT могла проверять, что лечебный лазер сфокусирован, и тогда размер микропоры будет расчетным. Датчик контроля глубины методом OCT может обеспечивать диаметр пучка, достаточно малый для просмотра на глубину микропоры и обеспечения данных и анализа между импульсами лечебного воздействия. В некоторых вариантах осуществления, система может использовать сигнал, чтобы контролировать перемещение глаза между импульсами быстрее, чем применяемое отслеживание движения глаза между микропорами.
[00168] В некоторых вариантах осуществления, как показано на фиг. 17, 18 и 33, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом измерение методом OCT может выполняться без сканирования пучком OCT, при настройке диаметра пучка OCT до значения меньше диаметра микропоры, чтобы просматривать микропору на глубину, без появления ложных показаний или шума в сигнале, обеспечивая надежное измерение глубины для глубины поры и остаточной стенки склеры.
[00169] В некоторых вариантах осуществления, как показано на фиг. 7, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом видимый наводящий лазерный пучок можно приводить к совмещению с осью лечебного лазера вдоль пучка для контроля глубины методом OCT, чтобы оптимальный размер пятна видимого наводящего лазера можно было сделать приблизительно равным диаметра пучка лечебного лазера и микропоры даже при том, что упомянутые лазеры имеют значительно различающиеся длины волн и расстояния фокусировки, при проецировании через оптические системы.
[00170] Как показано на фиг. 17 и 30, в некоторых вариантах осуществления, лазерная система может включать в себя биологическую обратную связь, основанную на изображениях видеокамеры и колориметрическом анализе или данных OCT, в связи или без с системой подсветки, чтобы прекращать лазерное лечебное воздействие (в целях безопасности) или изменять ширину следующего импульса, подлежащего излувчению.
[00171] Линеаризованные данные на выходе измерения глубины в ткани методом OCT требуют основательного анализа данных, чтобы определять глубину поры. Система может включать в себя способ интегрирования суммарного отражения, допускающего определение глубины после отдельного импульса. В некоторых вариантах осуществления, способ может включать в себя возможность измерения глубины микропоры в реальном времени и между импульсами с целью точного контроля глубины. Алгоритм определения глубины может быть разным для множества различных типов тканей. Фиг. 34A и 34B изображают примеры сигнала контроля глубины методом OCT для глаза свиньи. Как показано на фиг. 32, система может обеспечивать возможность оптимизации параметров следующего импульса, чтобы обеспечивать оптимальную глубину импульса. Система может определять импульсы, чтобы получать предварительно запланированную целевую глубину и объем удаления ткани в каждой поре. Как показано на фиг. 35A и 35B, измерение методом OCT толщины склеры перед лечебным воздействием может обеспечивать возможность управления алгоритмом для расчета оптимальной дозы лечебного воздействия.
[00172] Сканер OCT (2D и 3D)
[00173] В некоторых вариантах осуществления, как показано на фиг. 8, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом второй сканирующий датчик OCT может располагаться на оси лечебного лазера, чтобы обеспечивать высококачественное сканированное изображение зоны лечения, обеспечивающее предварительную и последующую проверку эффективности лечения. Это можно выполнить с помощью подвижного зеркала, поочередно с нормальным применением лечебного лазера.
[00174] В некоторых вариантах осуществления, система контроля глубины методом OCT и визуализации методом сканирующей OCT может использовать отдельные датчики, оптимизированные под каждую задачу, но совместно использовать компоненты системы OCT для уменьшения сложности, размеров и стоимости. Фигуры 38-41 и 42 представляют примеры объединенных и/или совместно используемых компонентов в составе системы OCT.
[00175] В некоторых вариантах осуществления, функцию сканирования OCT можно привести в положение, коллинеарное с терапевтическим пучком, с помощью дихроичного зеркала вдоль центральной оптической оси, которое позволяет пучку лечебного лазера проходить неподвижное зеркало сканера OCT для обеспечения возможности более частных сканирований зоны лечения.
[00176] Как показано на фиг. 43A, 43B, 44, 45 и 46, в некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом система сканирования OCT может создавать как 2D сечения, так и 3D изометрическое изображение зоны лечения до, во время и после лечения. Система может также обеспечивать данные измерения глубины и диаметра (или формы поперечного сечения поры, т.е. квадрат или прямоугольник) для каждой микропоры.
[00177] В некоторых вариантах осуществления система может также включать и обеспечивать функцию дифференциации слоев ткани от верхней поверхности до нижних поверхностей для всех нижерасположенных поверхностей, с использованием расширенных улучшенных алгоритмов структурной дифференциации и цифрового окрашивания тканей.
[00178] ОТСЛЕЖИВАНИЕ И КОНТРОЛЬ
[00179] Отслеживание движения глаза
[00180] При некоторых операциях, формирование микропоры может сбиваться, например, если пациент двигает глазом, и поэтому необходимо отслеживание движения глаза, как описано в настоящей заявке. Кроме того, система может включать в себя видеокамеру для измерения скорости движения глаза. В некоторых вариантах осуществления, настоящее изобретение может включать в себя процесс, как показано на фиг. 47, для случая, когда скорость является такой низкой, что можно прогнозировать лишь незначительное перемещение в пределах длительности последовательности импульсов абляции. Фиг. 48 и 49 также показывают примерный процесс отслеживания движения глаза.
[00181] Распознавание признаков
[00182] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом может применяться система слежения за движениями глаза, чтобы обеспечивать продолжение наводки лазера на правильное положение лечебного воздействия на глазу во время микрооперации, с введением поправки на движение глаза или других механических систем. Система может распознавать и отслеживать множество анатомических признаков глаза, включая зрачок, радужную оболочку, лимб и/или признаки сосудов (кровеносных сосудов) для внеосевых лечебных воздействий. Распознавание признаков может давать информацию для отслеживания движения глаза, обхода сосудов (отмену выбора мест отдельных пор) и наведения лечебного воздействия, например, чтобы сначала разместить зону лечения по правильным анатомическим признакам, а также для обхода анатомических структур, так называемых, нецелевых зон лечения.
[00183] В некоторых вариантах осуществления, лазерная система может включать в себя элементы отслеживания признаков для отслеживания движения глаза. Отслеживаемые признаки могут включать в себя, например, зрачок, радужную оболочку, лимб, сосудистые структуры. Лазерная система может принимать входные данные из камеры TOF, видеокамеры, системы OCT/DC, 3D сканера OCT.
[00184] В некоторых вариантах осуществления, система может включать в себя распознавание признаков (которые могут включать в себя черты лица, например, брови, нос, веки) из камеры TOF и способ применения для лечебного воздействия в правильных положениях и обхода. Система может включать в себя возможность установления положения признаков глаза, чтобы исключать воздействие лазерным излучением, позиционировать лазер для повторного лечебного воздействия и изменения положения, чтобы воздействовать на целевую ткань, с обходом неназначенной (нецелевой) ткани, и выдавать данные точки фиксации, углов лечебного лазера, обхода сосудов, позиционирования лечебного воздействия и системы ИИ (искусственного интеллекта). Система может совмещать несколько систем координат из разных подпроцессов анализа признаков (например, глубокого обучения, ИИ), чтобы выделять и накапливать относительные расположения (например, зрачка, радужной оболочки, сосудов и других признаков). Смотри также примерный процесс на фиг. 49 и 50. Система может включать в себя оверлей дополненной реальности для расширения анатомических биометрических характеристик и улучшения обучения (подобно ИИ). Фиг. 51 и 51A представляют примерные изображения распознавания признаков анатомического лимба, выделенного путем анализа методом ИИ и показанного в форме оверлея на изображение видеокамеры.
[00185] В некоторых вариантах осуществления, система может включать в себя распознавание признаков подповерхностной анатомии глаза (например, цилиарных мышц, шлеммова канала) по изображениям OCT, которые можно использовать при позиционировании зоны лечения на глазу. Фиг. 54 представляет примерные изображения OCT (контроля глубины или сканированные) для определения местоположения анатомического лимба и шлеммова канала с целью автоматизации позиционирования лечебного воздействия. Изображения представляют биометрию и поверхностную анатомию, полученные методом OCT, относительно размещения пор в реальном времени в зоне лечения, и отдельные микропоры. Фиг. 55 представляет примерное положение лечебного воздействия относительно шлеммова канала и анатомического лимба.
[00186] В некоторых вариантах осуществления, настоящее изобретение может включать в себя процесс суммирования объемов отдельных пор для зоны лечения в виде объемной доли пор и модификации/оптимизации оставшейся части или повторного лечебного воздействия. Процесс может предполагать форму поры, исходя из характеристик пучка, с использованием, но без ограничения, глубины по методу OCT для системы OCT/DC или сканированного изображения OCT и затем вычислять объем поры для каждой законченной поры. Данное значение может быть фактическим после того, как алгоритм обхода отмененных пор или обхода сосудов удаляет конкретные поры из плана лечения. Когда данный процесс выполняется в реальном времени, модификации последующей абляции пор могут повысить характеристик до целевых. Вычисления по данному процессу могут также выполняться до любого повторного воздействия, чтобы спланировать оптимальное лечение.
[00187] В некоторых вариантах осуществления, отслеживание движения глаза на основании распознавания признаков может обеспечивать отслеживание движения глаза, чтобы получать исходное положение лечебного воздействия для повторного воздействия или непрерывного воздействия на отдельные поры.
[00188] Видеокамера слежения за движениями глаза
[00189] В некоторых вариантах осуществления, система слежения за глазами может включать в себя высокоразрешающую видеокамеру с высокой частотой кадров и надлежащую подсветку. Данная подсветка может обеспечивать надлежащее освещение области лица/глаза пациента для врача и процедуры в общем, при этом подсветка не мешает отслеживанию признаков (отслеживанию движения глаза) из-за внесения искусственных отражений на глазу пациента, и достигается надлежащее отслеживание признаков (радужной оболочки, сосудистой структуры, пилотного пучка).
[00190] В некоторых вариантах осуществления, как показано на фиг. 56, система видеокамеры может создавать изображения для использования с целью отслеживания движения глаза, распознавания черт лица, наведения лечения, визуальных изображений для работы с ними пользователей, в связи с функциями ИИ и дополненной реальности графического пользовательского интерфейса (GUI).
[00191] В некоторых вариантах осуществления, система видеокамеры может включать в себя подвижное зеркало для модификации поля зрения вручную или автоматически. Как показано на фиг. 57, зеркало можно иметь электропривод по нескольким осям, чтобы совмещать поле наблюдаемого изображения с зоной воздействия.
[00192] В некоторых вариантах осуществления, система видеокамеры может включать в себя видеокамеру с оптической системой объектива, чтобы создавать высококачественные изображения с большим увеличением, подобно хирургическому микроскопу. Фиг. 58 представляет примерные микроскопические изображения с большим увеличением для просмотра зоны лечения.
[00193] В некоторых вариантах осуществления, как показано на фиг. 59, 60, 61A и 61B, лазерная система может включать в себя видеокамеру, которая может формировать изображение зоны лечения и окружающих признаков, чтобы определять правильное местоположение зоны лечения относительно лимба и с правильным угловым положением относительно зрительной оси. В некоторых вариантах осуществления, данные возможности могут быть также изменяемыми вручную врачом с использованием GUI.
[00194] Подсветка
[00195] Вследствие того, что разные признаки в глазу, а также пилотный пучок можно точнее обнаруживать при использовании источника света с заданными длинами волн подсветки (например, RGB (красной/синей/зеленой) и ИК (инфракрасной)), система включает в себя специальную систему подсветки, содержащую механику, источники света, электронику, а также программно-реализованные подключение, оценку и алгоритмы. Поскольку видеокамера для слежения за глазом обеспечивает возможность считывания ее отдельных пикселей, то может обеспечивать более точное отслеживание признаков, абсолютно необходимое с точки зрения безопасности.
[00196] В некоторых вариантах осуществления, лазерная система может включать в себя систему подсветки, которая может оптимизировать измерения и изображения для различных видеокамер системы и совершенствовать распознавание черт лица и глаза для слежения и позиционирования. Система подсветки может содержать осветительные компоненты с несколькими длинами волн, при этом подсветку можно модулировать на основании активного датчика или датчика-видеокамеры. Система использует цветные (RGB) и ИК источники подсветки. Фиг. 75 и 74 представляют примерные виды снизу системы лазерной головки, включающей в себя видеокамеру(ы), источники подсветки, линзы для формирования изображений, дисплей и перекрестье юстировочного лазера видимого диапазона. Линзовый узел может изменяться в зависимости от фактически применяемой оптической схемы. Дисплей может обеспечивать фиксацию глаза, точек взгляда.
[00197] Модуляция подсветки цветного (RGB) и ИК источников может быть синхронизирована с камерой и датчиками, чтобы распознавать признаки.
[00198] В некоторых вариантах осуществления, лазерная система может включать в себя подсветку и систему камеры для оптимизации характеристик отслеживания движения глаза. В некоторых вариантах осуществления, система может через каждые 33 мс излучать белый свет (например, диодом RGB) и захватывать кадр для визуализации на экране хирурга/ассистента (для обеспечения видеотрансляции пациента в реальном времени). Между данными 33-мс периодами система может использовать разные подсветки в отдельных цветах, чтобы обнаруживать разные признаки. Длительности отдельных световых импульсов могут быть в диапазоне 10 мс. Радужная оболочка может лучше всего обнаруживаться в синем/ИК свете. Признаки сосудов, а также пилотный пучок могут лучше всего обнаруживаться в красном/зеленом свете. Пилотный пучок может также модулироваться по яркости, то есть, система может обнаруживать и отличать пилотный пучок от признаков сосудов (поскольку и тот и другие имеют красный цвет). Это будет давать системе важную информацию о реальном состоянии полной системы перемещения относительно глаза пациента. Кроме того, система может считывать отдельные ячейки ПЗС видеокамеры отслеживания глаза, при этом система может выбирать каналы RGB каждой ячейки. Это также улучшает изображения GUI и функции, базирующиеся на изображениях с дополненной реальностью.
[00199] Обход сосудов
[00200] В некоторых вариантах осуществления, система слежения за движениями глаза может визуализировать зону лечения и может либо интерпретировать изображения, либо давать возможность врачу рассматривать изображения и определять местоположения микропор, которые следует избегать, например, как при обходе сосудов. В некоторых вариантах осуществления, микропоры, которые следует исключить, могут быть «помечены для исключения лазерного воздействия» либо врачом, либо посредством автоматизированного анализа изображения. Фиг. 61A-64 представляют примерные изображения, на которых поры могут быть маркированы для исключения с целью обхода анатомических структур, например, обхода кровеносного сосуда. Фиг. 65 представляет примерное изображение для подтверждения глубина поры, и фиг. 66 представляет дополнительные примеры.
[00201] В некоторых вариантах осуществления, система слежения за движениями глаза может анализировать изображения видеокамеры, распознавать признаки сосудов и определять, какие поры следует автоматически удалить из плана лечения.
[00202] В некоторых вариантах осуществления, фиг. 67 и 68 на GUI представляют зоны лечения относительно лимба и предлагают схему на GUI, чтобы помогать при наведении лечебного воздействия. Фиг. 69 и 58 представляют примерные микроскопические изображения видеокамеры с большим увеличением для просмотра положения зон лечения относительно лимба.
[00203] В некоторых вариантах осуществления, система может включать в себя высокоразрешающую видеокамеру, чтобы допускать проверку, как с помощью оптического микроскопа. Как описано выше на фиг. 57, система может включать в себя подвижное зеркало для назначения целевой зоны с элементами ручного или автоматического управления изменением масштаба и позиционированием, исходя из положений признаков в изображениях видеокамеры и камеры TOF.
[00204] Фиг. 61A и 61B представляют процесс, в соответствии с некоторыми вариантами осуществления настоящего изобретения, для позиционирования лечебного воздействия и обхода анатомических структур, при этом процесс может выполняться вручную, полуавтоматически или полностью автоматически, с использованием ИИ, обнаружения признаков, изображений видеокамеры и сканированных изображений OCT и использованием статических или динамических изображений глаза, полученных камерой.
[00205] Совмещение с лицом
[00206] В некоторых вариантах осуществления, как показано на фиг. 75 и 74, лазерная система может включать в себя камеру TOF (времяпролетную) для позиционирования лазерной головки над пациентом и определения ключевых черт лица. Данная система может работать совместно с картиной (перекрестьем), проецируемой лазером видимого диапазона на лицо пациента в качестве известного признака для анализа положения. Камера TOF может быть времяпролетной камерой, которая излучает моделированный лазерный пучок и измеряет время до отражения. По данной информации можно построить 3D изображение, как показано на фиг 70. Камера TOF облегчает нахождение лица перед тем, как производят фокусировку на глазах камеры слежения за движениями глаза, и перед тем, как пучок системы OCT/DC может сфокусироваться на склере.
[00207] В некоторых вариантах осуществления, камера TOF может обеспечивать данные изображения, которые указывают на брови или нос, часть структуры лица, которые заслоняют видимость глаза. После этого можно изменить углы фиксации и лечебного воздействия для отдельного пациента таким образом, чтобы черты не заслоняли видимость.
[00208] В некоторых вариантах осуществления, камера TOF или анализ изображения может определять доступность зоны лечения и проверять, что веко и векорасширитель убраны из хода лазерного пучка.
[00209] Наведение - позиционирование лечебного воздействия
[00210] В некоторых вариантах осуществления, как показано на фиг. 53, лазерная система может включать в себя единственное сканирующее зеркало, которое совмещает пучок системы OCT/DC, которым сканируют по поверхности глаза, чтобы отобразить анатомические признаки, такие как край лимба, шлеммов канал, цилиарные мышцы, край сетчатки, чтобы поддерживать позиционирование лечебного воздействия и обход анатомических структур.
[00211] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом размер, форма и узор микропорации зоны лечения можно модифицировать на основании плана лечения для узоров микропораций. Например, фиг. J и K заявки США № 15/942,513 представляют примерную золотую спираль, образованную из отдельных картин лечения, и фиг. L заявки США № 15/942,513 представляет примерный протокол лечения для 4 квадрантов.
[00212] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью воздействия на ткань глаза, и при этом центр зоны лечения можно модифицировать на основании узора микропорации, который подлежит абляции. В некоторых случаях, центр картины может быть центром зрачка (или лимба) для абляции золотой спирали в нескольких сегментах лечебного воздействия.
[00213] В некоторых вариантах осуществления, лазерная система может включать в себя средство для модификации позиционирования пор в матрице лечебного воздействия и нормальных зон на основании формы глаза пациента, чтобы оптимально охватывать анатомические признаки и отличия положений пациента. Это можно делать на основании плана предварительного лечения и априорной информации о форме глаза или на основании данных сканирования OCT по расширенной зоне лечения.
[00214] Объем поры и объемная доля пор
[00215] Результаты лечения - удаление ткани
[00216] В некоторых вариантах осуществления, данные OCT и форму поры можно использовать для вычисления удаления объема ткани по зонам, после исключений обхода, после абляции пор, на основании анализа объема по реальным данным OCT или на основании типичной поры для применяемой оптической конфигурации. Анализ объема будет включать в себя объемную долю пор, а также пространственную плотность или объемную плотность. Дополнительный анализ пористости и пористости 3-мерного каркаса является характерным признаком в настоящей системе. План повторного лечения может быть разработан для второго лечения или модифицирован во время текущего лечения, чтобы обеспечить удаление целевого объема, искомую пористость и максимальную пористость.
[00217] В некоторых вариантах осуществления, исключения из плана лечения можно использовать для создания нового плана лечения, который восстанавливает удаление ткани, чтобы обеспечить такую же эффективность лечения.
[00218] Ткань глаза, остающуюся после формирования пор, можно использовать в модели FMEA (оценки видов и последствий отказов) для оценки улучшения аккомодации, гидродинамики глаза, снижения IOP, чтобы известить о плане повторного лечения и модифицировать его для повышения эффективности. Для извещения и непосредственного будущего лечения можно использовать ИИ.
[00219] В некоторых вариантах осуществления, как показано на фиг. 98, объемную долю пор можно изменять для получения искомых или улучшенных результатов. Получен ряд свидетельств, предполагающих, что повышение плотности и пористости в некоторых случаях удваивало эффективность лечения, как показано на фиг. 112-115. Пористость или объемная доля пор определяется как отношение суммарного объема пор к видимому объему ткани. Пористость, пространственную плотность и пористость 3D каркаса можно использовать для создания нового плана повторного лечения. В случае, когда объем поры является величиной пустоты, созданной лечебным воздействием, и между порами находится остающаяся ткань, которая сохраняет сплошность. При этом пространственная плотность или объемная плотность означает, насколько плотно или тесно упакованы поры. Это влияет как на пористость, так и на плотность, которая влияет на пористость ткани, ее свойство, которое является отношением объема пор в ткани к ее общему объему. Пористость ткани зависит от нескольких факторов, включающих (1) плотность упаковки, (2) широту распределения размеров пор (соотношение полидисперсности и монодисперсности), (3) форму пор и (4) взаимную связанность пор внутри матрицы. Пористость относится к доле пустот или суммарному пространству пустот внутри объема тканевой стенки и служит полезным показателем возможности индивидуализировать картины лечения соответственно различным толщинам и биомеханическим свойствам отдельных тканей, когда возраст является зависимым переменным параметром, для разработки алгоритма лечения. Пористость, P (%), ткани вычисляется с использованием следующего уравнения, в котором M означает массу на единицу площади (г/м2) ткани, h означает толщину (мкм) ткани, и ρ означает относительную плотность матрицы пор (г/см3). Термин «коэффициент упаковки» обеспечивает относительный показатель общей пористости тканевой структуры. Он вычисляется делением плотности ткани на относительную плотность матрицы пор и может иметь значения, теоретически, в диапазоне от 0 (одни поры и никаких сплошностей) до 1 (никаких пор и одна сплошность). Значения ближе к нулю означают более высокую пористость. Плотность пор вычисляется делением M, массы на единицу площади ткани, на h, ее толщину, и выражается в единицах г/см3. P=100 [1-M/1000∙h∙ρ]. Коэффициент пустотности также является важным показателем для оптимизации лечения и повторного лечения, который системный анализ и ИИ способны отслеживать в 3D каркасах ткани в промежутках между импульсами и между порами. Коэффициент пустотности является отношениепм объема пустот (пор) в ткани к объему сплошной ткани, остающейся на участке матрицы в целевой ткани.
[00220] e=Vv/Vs
[00221] Где:
e=Коэффициент пустотности;
Vv=Объем пустот (м3 или куб.футы);
Vs=Объем сплошностей (м3 или куб.футы).
[00222] Таким образом, коэффициент пустотности равен отношению, которое может быть больше 1. Его может также выразить как долю. Коэффициент пустотности и пористость отличаются только знаменателем. Коэффициент пустотности равен отношению пустот к сплошностям, а пористость равна отношению пустот к суммарному объему.
[00223] В некоторых вариантах осуществления, лазерная система может оптимизировать эффективность лечения или повторного лечения на базе программ искусственного интеллекта (ИИ), которые собирают данные лечения для множества пациентов, анализируют результаты, исходя из, но без ограничения, размеров, форм, глубин, узоров, положений пор, леченых зон, форм глаз. Программа ИИ может поддерживаться интегрированной или автономной конечно-элементной моделью (FEM) глаза, которая подробно описана в заявках США 15/638,346 и 16/702,470, включенных в настоящую заявку. Данный результат можно использовать для модификации плана лечения автоматически или по рекомендациям врача.
[00224] СИСТЕМА ЛАЗЕРНОЙ ГОЛОВКИ
[00225] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани вне оси или в области глаза, которая не совпадает со зрительной осью или направлена в сторону от зрачка глаза, где находится позиция взгляда. Точка фиксации на пользовательском дисплее (смотри, например, фиг. 75) обеспечивает точку фиксации для направления и фиксации взгляда пациента по отдельной оси, которая не является зрительной осью или зрачковой осью, в течение времени одного лечебного воздействия на зону, которое может выполняться в косом квадранте, с противоположной (на 180 градусов) стороны. Как показано, например, на фиг. 71 и 72, лазерная система может включать в себя систему лазерной головки, которая может обеспечивать точку фиксации. Лазерная головка может перемещаться вертикально вверх и вниз или поворачиваться над пациентом.
[00226] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью воздействия на ткань глаза, и при этом лазерный пучок может быть ориентирован вне оси (например, но над зрительной осью глаза). Лазер оказывает лечебное воздействие, в общем, перпендикулярно или, по существу, перпендикулярно поверхности глаза в центре зоны лечения. Глаз может располагаться в точке фиксации, которая может не совпадать с осью воздействия, и глаз может также находиться в крайнем положении, чтобы воздействовать на зону лечения ткани глаза, которая может находиться эксцентрично относительно зрительной оси. В некоторых вариантах осуществления, угол лазерного пучка относительно зрительной оси может составлять 51° или, по существу, около 51°.
[00227] Фиг. 73-85 представляют примерную систему лазерной головки лазерной системы по настоящему изобретению. Как показано на фиг. 73, в некоторых вариантах осуществления, лазерная головка может включать в себя корпусную конструкцию, электродвигатели наведения лазера и кодеры, лазерную подсистему, теплообменник охлаждения лазера, видеокамеру(ы) для применения при, по меньшей мере, отслеживании движения глаза, и источники подсветки. Фиг. 74 и 75 дополнительно представляют вид снизу лазерной головки, с изображением перекрестья юстировочного лазера видимого диапазона, дисплея для использования, по меньшей мере, при фиксации глаза и камеры TOF.
[00228] В некоторых вариантах осуществления, как показано на фиг. 76, лазерная головка может включать в себя шланг для откачивания отходов лечения, который подробно описан в настоящей заявке.
[00229] Лазерная головка и лазерная подсистема обеспечивают возможность гибких движений. Например, фиг. 77-79 представляют примерные движения системы лазерной головки в системе без зеркальной гальванометрической системы. Фиг. 78 (средний 7800 является видом сверху) и 79 представляют перемещения наклона, поворота и отклонения лазерной головки. Поворот выполняется вокруг вертикальной оси. Наклон выполняется вокруг горизонтальной оси. Отклонение выполняется вокруг горизонтальной оси, расположенной под 90 градусов к оси наклона. Фиг. 82 и 83 представляют примерные положения фокусировки и угловой ориентации лазерного пучка относительно верха глаза при внеосевых лечебных воздействиях, при этом ось воздействия смещена относительно оси фиксации взгляда глаза. Поворот и поступательное перемещение (по оси x) лазерной головки в целом обеспечивают движение по осям x и y вместе с движением отклонения. Применение отклонения для управления движением по x и y вносит изменение в положение фокуса и, при этом, требует поправки по оси z путем подъема всей головки или, в некоторых случаях, возможно, путем автофокусировки фокусирующей линзы, как показано, например, на фиг. 13 и 14.
[00230] Фиг. 73, 81, 80A и 80B представляют примерные положения лазерной головки для каждого квадранта глаза около черт лица.
[00231] В некоторых вариантах осуществления, лазерная система может использовать систему слежения за движениями глаза, чтобы оценивать способность пациента удерживать глаз достаточно спокойно до лечения. Врач может изменять положение (угол) фиксации или применять систему сопряжения с глазом, чтобы помогать пациенту удерживать глаз в неподвижном положении. Фиг. 88 и 89 изображают примерную систему сопряжения с глазом по настоящему изобретению.
[00232] Система фиксации глаза может сохранять основные данные изображения глаза, чтобы допускать изменение положения в зоне лечения позднее для завершения лечения или дополнения предыдущих лечебных воздействий (повторного лечения).
[00233] Точка фиксации или направления взгляда может назначаться индивидуально относительно пучка лечебного лазера для каждого квадранта и для разных пациентов с разными лицевыми структурами.
[00234] Как показано на фиг. 75, лазерная система может включать в себя дисплей пациента, который можно применять также для сообщения пациенту другой информации, включая инструкции и информацию.
[00235] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом пучок лечебного лазера и соответствующие точка фиксации и ось фиксации связаны и регулируются для обоих глаз и квадрантов, чтобы обходить лицевые структуры (например, нос). Фиг. 73 и 77 представляют примерные положения лазерной головки для каждого квадранта вокруг лицевых признаков. В некоторых вариантах осуществления, пучок лечебного лазера и зрительная ось (ось фиксации) могут составлять, по существу, фиксированный угол и располагаться противоположно (на 180 градусов) вокруг вертикальной оси. Некоторые пациенты могут иметь крайние черты лица в некоторых квадрантах, которые могут требовать уменьшения данного угла. Система может допускать, чтобы ось воздействия была немного неперпендикулярной к поверхности склеры.
[00236] Пример угла лечебного воздействия и фиксации: (1) Угол лазерного лечебного воздействия может составлять, но не всегда, 28°. Система нацеливается для «импульсного воздействия на глаз» лазером под углом как можно ближе к 90°, с одновременным учетом границ геометрии лица (например, носа, бровей). (2) Точка фиксации отображается на экране и соответственно перемещается относительно положения квадранта, который в настоящий момент подвергается лечебному воздействию, чтобы приводить «направление взгляда/взгляд» пациента в правильное положение для импульсного воздействия на глаз под углом как можно ближе к 90°. (3) Угол между лечебным воздействием и точкой фиксации не всегда является одинаковым. Точки фиксации для конкретного квадранта (Q) на дисплее для каждого положения лечебного воздействия в квадранте. Угол зависит от расстояния до пациента, которое, в свою очередь, зависит от текущего квадранта, подвергаемого лечению. Фиг. 81 представляет примерную таблицу, содержащую подробные данные о положении глаза в каждом квадранте и угле воздействия (например, как показано на фиг. 73).
[00237] В некоторых вариантах осуществления, лазерная система может включать в себя лазерную головку, которая может иметь другие ориентации, подходящие для многочисленных положений пациента и конфигураций кабинета. Фиг. 90 представляет примерную лазерную систему с системой лазерной головки в случае, когда пациент может находиться в положении сидя.
[00238] Оптимизация скорости, направления движения и фокусного расстояния между отдельными микропорами в пределах зоны лечения может достигаться посредством одного или нескольких элементов в системе управления движением. Для оптимизации эффективности лечения можно управлять порядком создания пор в пределах зоны лечения, и примерный порядок поясняется на фиг. 91.
[00239] Как показано на фиг. 38-41 и 42, в некоторых вариантах осуществления, лазерная система может включать в себя различные комбинации компонентов системы OCT, совместно используемых и объединенных для упрощения, повышения надежности и снижения стоимости.
[00240] ЛАЗЕРНАЯ СИСТЕМА
[00241] Глаз построен из соединительной ткани. Возрастные дефекты у людей связаны с тенденцией ускоряющегося ухудшения состояния со старением. Сшивки возникают вследствие некоторых классов продуктов обмена веществ, таких как конечные продукты гликирования (AGE). В соединительной ткани, например, глаза, AGE вызываются сшивкой коллагеновых фибрилл. Сшивки повышают биомеханическую жесткость соединительной ткани. Кросслинкинг в склере обуславливает ригидность глаза и связан с потерей зрительной аккомодации, а также развитием других возрастных глазных заболеваний (например, внутриглазной гипертензии, AMD (возрастной дегенерации макулы) и некоторых форм катаракты). Разрушение сшивок или «расшивка» коллагеновых фибрилл может обратить течение AGE и отрицательные воздействия возраста. Некоторые варианты осуществления системы могут включать в себя лазерную микропорацию склеры (LSM), которая имеет целью расшивку микрофибрилл склеры посредством создания матрицы микропор по физиологически важным, критическим зонам, чтобы снизить биомеханическую жесткость, обусловленную возрастом. Главной целью является создание возможности для комплекса цилиарных мышц свободнее двигать хрусталик и эффективнее восстанавливать рабочий диапазон фокусировки (EROF) глаза, чтобы видеть на различных расстояниях, особенно, близких и промежуточных, которые теряются с возрастом. Лечение методом LSM может также немного улучшать фокусировку зрения на большие расстояния для пациентов со скрытой дальнозоркостью, которые потеряли некоторую часть своего дистанционного зрения из-за потери аккомодационной способности. Фиг. 117, 118 и 119 представляют изображения примерной расшивки.
[00242] В некоторых вариантах осуществления, процесс лазерной терапии по настоящему изобретению может воздействовать на специальные зоны лечения, которые находятся в особых физиологических зонах, охватывающих анатомические структуры в глазу, критически важные для функций глаза. Хотя в настоящей заявке описаны примеры 3 или 5 физиологических зон, можно также рассматривать другое число физиологических зон для лечения.
[00243] В некоторых вариантах осуществления, картина лечения может быть описана как 5 критических зон на 5 различных расстояниях от внешнего края анатомического лимба (AL), не соприкасающихся с любыми компонентами или связанными тканями роговицы, как показано на фигурах, от фиг. 2B-1 до фиг.2B-3 заявки США № 15/942,513, и фиг. 95 и 97.
[00244] В некоторых вариантах осуществления, процесс лазерной терапии по настоящему изобретению может обеспечивать разные углы лазерного воздействия для разных квадрантов. Например, лазер может фокусироваться относительно AT (анатомического) лимба. Фиг. 80A, 80B, 73 и 81 представляют примеры положений 4 квадрантов на каждом глазу для лечения. Фиг. 91, 92, 93 и 94 представляют множество форм зон внеосевого лечебного воздействия и положений вокруг зрительной оси. Система может модифицировать размер зоны лечения или узор пор в пределах зоны лечения по конкретным зонам на основании диаметра глазного яблока пациента. Диаметр глазного яблока может быть измерен традиционным методом перед лечением или может быть высотой зоны лечения, выведенной путем анализа данных сканирования OCT, которая продолжается от точки над AT лимбом до предела запланированной зоны лечения, чтобы гарантировать невыход лечебного воздействия за безопасные зоны, исключающие сетчатку. Смотри примерные зоны лечения на фиг. 52 и 54.
[00245] Зона и картины лечения
[00246] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, и при этом лазерный пучок можно установить с возможностью полного кругового или 360-градусного воздействия вокруг глаза. Фиг. 94 и 93 представляют примерную полную окружную или 360-градусную золотую спираль, образованную отдельными картинами лечения. Система может изменять точки направления взгляда и несколько зон лечения, чтобы выполнить абляцию предварительно заданной окружной картины или спирали.
[00247] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью воздействия на зоны переднего сегмента (зоны AS) склеры для образования требуемого узора микропор с целью получения искомых результатов. Фиг. 96, 67, 68, 97, 98, 99 и 100 представляют примеры передних зон лечения, которое может выполняться с использованием системы по настоящему изобретению.
[00248] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью воздействия на зоны заднего сегмента (зоны PS) склеры для образования требуемого узора микропор с целью получения искомых результатов. Фиг. 3, 101, 102, 103, 104 и 105 представляют примеры задних зон лечения, например, 5 зон, которые можно реализовать с использованием системы по настоящему изобретению. Фиг. 101 дает описание примерных критических зон заднего сегмента. Фиг. 102 и 103 представляют примерные критические зоны заднего сегмента на глазу. Как показано на фиг. 103, примерный задний сегмент глаза включает в себя T, височный, и N, назальный. На фигуре виден зрительный нерв (a) с его центральными сосудами и окружающими менингеальными оболочками. Его центр находится на расстоянии около 3 мм в сторону носа и 1 мм ниже заднего полюса глазного яблока. Вокруг него находятся задние короткие цилиарные артерии и нервы. Примерное положение макулы находится в x. Вдоль горизонтального меридиана, который делит глаз надвое, расположены задние длинные цилиарные артерии и нервы (b). Показаны выходы четырех вортикозных вен, по одной для каждого квадранта (c). Показаны криволинейные косые входы верхней косой (d) и нижней косой (e) мышц. Отрезанные концы четырех прямых мышц находятся в f.
[00249] Лечение в пределах ограниченной зоны лечения может модифицировать микропоры в конкретных зонах. Ромбическая форма является простым примерным узором, другие могут увереннее поддерживать оптимизацию пор в каждой зоне.
[00250] Как показано на фиг. 91 и 104, лечение в пределах ограниченной зоны лечения может модифицировать микропоры в конкретных зонах. Узоры микропор и порядок образования микропор можно изменять при изменении зоны лечения и для конкретных зон, чтобы оптимизировать эффективность лечения. Например, фиг. 92 представляет один порядок образования микропор с 1-й по 48-ю. На фиг. 93 и 94 представлены другие примеры нескольких форм и узоров зон лечения в нескольких местах вокруг зрительной оси.
[00251] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения ригидности глаза в склере. Система может расшивать умножающиеся с возрастом сшивки фибрилл и микрофибрилл, которые возникают в соединительных тканях (фиг. 5 и 4 представляют примеры ткани, подвергнутой лечению методом микропорации), включая соединительную ткань в склере. Система может снижать биомеханическую жесткость посредством разрыва (расшивки) связей. Фиг. 118 и 119 представляют примерную абляцию отдельных пор пучком лечебного лазера, и расшивка происходит как разрыв связей в микрофибриллах и фибриллах. Она расслабляет ткань или позволяет ткани становится эластичнее, т.е. снижает биомеханическую жесткость.
[00252] В некоторых вариантах осуществления, матричная структура микропор может быть спиральным узором архимедовой спирали, спирали Корню, параболической спирали, гиперболической спирали, спирали жезл, логарифмической спирали, спирали Фибоначчи, золотой спирали, решетки Браве, сетки, не являющаяся решеткой Браве, или их комбинаций.
[00253] В некоторых вариантах осуществления, матричная структура микропор может иметь контролируемую асимметрию, которая является, по меньшей мере, частичной вращательной асимметрией относительно центра матричной структуры. По меньшей мере, частичная вращательная асимметрия может распространяться на, по меньшей мере, 51 процент микропор матричной структуры. По меньшей мере, частичная вращательная асимметрия может распространяться на, по меньшей мере, 20 микропор матричной структуры. В некоторых вариантах осуществления, матричная структура микропор имеет случайную асимметрию.
[00254] В некоторых вариантах осуществления, матричная структура микропор имеет контролируемую симметрию, которая является, по меньшей мере, частичной вращательной симметрией относительно центра матричной структуры. По меньшей мере, частичная вращательная симметрия может распространяться на, по меньшей мере, 51 процент микропор матричной структуры. По меньшей мере, частичная вращательная симметрия может распространяться на, по меньшей мере, 20 микропор матричной структуры. В некоторых вариантах осуществления, матричная структура микропор может иметь случайную симметрию.
[00255] В некоторых вариантах осуществления, матричная структура содержит несколько спиралей по часовой стрелке и несколько спиралей против часовой стрелки. Число спиралей по часовой стрелке и число спиралей против часовой стрелки могут быть числами Фибоначчи или кратными числам Фибоначчи или могут находиться в отношении, которое сходится на золотом отношении.
[00256] Лазерная система и оптические конфигурации
[00257] В некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью обеспечения лечебного лазера внутри лазерной головки, которая может направлять пучок гониометрическим методом с перемещением до 5 градусов.
[00258] Во всех случаях, точные угловое расположение и положение фокусировки лечебного лазера могут достигаться путем сочетания движения нескольких элементов. В некоторых вариантах осуществления, данные элементы, которые могут содержаться в системе лазерной головки, описаны выше и показаны, по меньшей мере, на фиг. 78, 73, 80A, 80B и 77.
[00259] Как показано на фиг. 10, в некоторых вариантах осуществления, лазерная система может использовать гальванометрические зеркала, отдельный лазер видимого диапазона и волокна системы контроля глубины методом OCT (системы OCT/DC), которые совмещаются на оси лечебного лазера, и проходить через одну и ту же фокусирующую оптическую систему, управляющую работой системы OCT/DC и операциями лазера и обеспечивающую подсветку и видеокамеру с прямой видимостью для врача.
[00260] Как показано на фиг. 11, в некоторых вариантах осуществления, лазерная система может использовать гальванометрические зеркала, лазер видимого диапазона и систему OCT/DC, которые совмещаются посредством одного волокна на оси лечебного лазера, и проходить через одну и ту же фокусирующую оптическую систему, управляющую работой системы OCT/DC и операциями лазера и обеспечивающую подсветку и видеокамеру с прямой видимостью для врача.
[00261] Как показано на фиг. 12, в некоторых вариантах осуществления, лазерная система на фиг. 11 может также включать в себя систему сканирования OCT.
[00262] Как показано на фиг. 13, в некоторых вариантах осуществления, лазерная система, подобная показанной на фиг. 12, может работать без гальванометрических зеркал, 5-осевой лазерной головки и отдельного движения по оси Z.
[00263] Как показано на фиг. 14, в некоторых вариантах осуществления, лазерная система, подобная показанной на фиг. 13, может иметь конфигурацию, которая не содержит гальванометрических зеркал, но содержит 6-ю ось линзы с автофокусировкой (AF).
[00264] Как показано на фиг. 120, в некоторых вариантах осуществления, лазерная система может включать в себя схему устройства наведения лазера для полусферического воздействия, при этом концепция полусферы является базовой для перемещения лазерной головки по полусферической поверхности и постоянного направления в центр зоны лечения. Полусфера перемещается по осям x, y и z, чтобы позиционировать центр полусферы на глазу пациента, с использованием или без гальванометрических зеркал в конструкции. В простейшем случае, система управления движением может перемещать лечебный лазер вокруг глаза пациента на поверхности полусферы. Полусферу можно позиционировать по осям x, y и z для совмещения с положением начальной микропоры по протоколу лечения и затем переместить на шаг по полусфере в положение следующей микропоры. Оси x, y и z могут не изменяться во время лечебного воздействия в одном квадранте, но могут нуждаться в изменении для другого квадранта.
[00265] Как показано на фиг. 121-125, и 128-132, в некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, при наличии множества оптических компонентов для модификации размера, фокальной точки пучка (и поэтому поры), с выполнением настройки вручную или автоматически под управлением системы. Например, как видно на фиг. 121-125, компоненты могут включать в себя линзу из CaF2, сапфировый объединитель, сапфировую полусферическую линзу, коллимировать, фокусировать и дефокусировать оптический пучок. Сапфировый объединитель обеспечивает средство для приведения пучков OCT и лазера видимого диапазона в ориентацию, коллинеарную с терапевтическим пучком. Цилиндрическая линза из CaF2 служит для скругления пучка. На фиг. 128-132, для изменения диаметра пучка в предметной плоскости на глазу применяется пара линз вместо жестко встроенного линзового элемента, показанного на предыдущих фигурах.
[00266] Как показано на фиг. 84 и 85, в некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, при наличии множества оптических компонентов, содержащихся в узле небольшого веса, включающего в себя другую оптическую систему, дифракционный делитель пучка (DBS), электродвигатели, кодеры, лазер, устройство возбуждения лазера, фиксатор для волокон OCT и средство охлаждения.
[00267] В некоторых вариантах осуществления, лазерная система может включать в себя сканирующее зеркало, которое может служить дублирующей осью движения, чтобы очень быстро вносить поправки в наведение пучка на глаз. Фиг. 126A и 126B представляют некоторые технические характеристики и возможности сканирующего зеркала.
[00268] Как показано на фиг. 126A, 126B и 127, в некоторых вариантах осуществления, лазерная система может быть выполнена с возможностью лечения склеральной ткани, при наличии единственного сканирующего зеркала, которое совмещает функции сканирования OCT и контроля глубины методом OCT, причем сканирующее зеркало можно регулировать для отслеживания последовательности импульсов лечебного лазера по поверхности глаза во время абляции одной поры таким образом, чтобы создавать отличающиеся общую форму и размер поры и/или отличающуюся форму низа поры. В некоторых случаях, DBS может создавать участок размера и формы микропоры. Наведение пучка можно переводить, чтобы составлять форму более крупной микропоры с использованием нескольких положений и импульсов системы.
[00269] В некоторых вариантах осуществления, как показано на фиг. 182, лазерная система может включать в себя сканирующее зеркало, совмещающее сканирование OCT и контроль глубины методом OCT в одном пучке OCT, коллинеарном с лечебным лазером, при этом сканирующее зеркало может обеспечивать функции сканирования и фиксированного положения, связанные со сканированием OCT и контролем глубины методом OCT. В некоторых вариантах осуществления, лазерная система может использовать обе функции одновременно или поочередно для совмещения сканирования OCT с лечебным воздействием в квадранте.
[00270] Как показано на фиг.127, 86, 85 и 57, в некоторых вариантах осуществления лазерная система может быть выполнена с возможностью лечения склеральной ткани, при наличии единственного сканирующего зеркала, которое совмещает функции сканирования OCT и контроля глубины методом OCT, и дифракционного делителя пучка (DBS), формирующего и задающего размер пучка, в лазерной головке, как показано на фиг. 85. В некоторых вариантах осуществления, размер и форму пучка можно изменять множеством небольших DBS. Элементы DBS разных оптических схем можно переключать вручную или автоматически для модификации профиля терапевтического пучка, коллинеарного с пучком лечебного лазера. В некоторых вариантах осуществления, DBS можно применять для деления одного лазерного пучка на несколько пучков, каждый из которых имеет характеристики исходного пучка, можно применять в расходящемся пучке, можно применять для изменения размера пучка и можно уменьшать в размерах, при использовании перед объединителем пучка. Конструкции DBS могут давать, в результате, произвольные распределения пятна. Размер одного пятна может быть не связанным с расстоянием между пятнами.
[00271] Система подголовника и кресло
[00272] В некоторых вариантах осуществления, как показано на фиг. 133 и 72, лазерная система может включать в себя стол или кресло пациента, который(ое) может крепиться к механической конструкции лазерной системы или позиционироваться относительно нее и будет закрепляться или оставаться зафиксированным в рабочем положении относительно лазерной головки.
[00273] В некоторых вариантах осуществления, лазерная система может включать в себя кресло пациента, которое допускает отклонение назад и перемещение пациента под лазерной системой с помощью бесконтактной автоматической системы или вручную. Предпочтительный вариант осуществления будет позиционировать голову точно по центру в пределах рабочего диапазона лазерной головки по осям x и y и затем обеспечивать движение по оси Z с целью перемещения лица пациента до выставления по центру в рабочем диапазоне лазерной головки. Из данного положения, система управления движением камеры TOF, перекрестья лазера и лазерной головки может настроиться на пациента для лечения.
[00274] Как показано на фиг. 9, 71, 134 и 135, в некоторых вариантах осуществления, лазерная система может включать в себя подголовник пациента для удерживания головы и глаза пациента в неподвижном положении и обеспечения приблизительного положения глаза относительно лазерной головки во время подготовки и лечения. Подголовник может закреплять голову пациента, как требуется, чтобы способствовать удерживанию глаза в неподвижном положении. Подголовник может крепиться к системе, как показано на фиг. 71, или креслу или процедурному столу. Подголовник можно перемещать вверх и вниз для приблизительного регулирования глаза пациента по оси Z. Подголовник может также служить местом крепления для автоматизированного дополнительного механизма сопряжения с глазом.
[00275] В некоторых вариантах осуществления, подголовник может включать в себя шлем, закрепленный на подголовнике на кресле или столе. Или подголовник может быть закреплен к лазерной системе и обеспечивать положительную обратную связь по положению с системой.
[00276] В некоторых вариантах осуществления, подголовник может включать в себя шланг для откачивания отходов тканей (как показано на фиг. 76) или систему управления откачиванием с фильтром buffalo для откачивания хирургического дыма, расположенный(ую) вблизи глаза и надлежащим образом для каждой зоны лечения. В некоторых вариантах осуществления, подголовник может включать в себя средство аспирации отходов абляции в положении рядом с подвергаемым лечению квадрантом и с возможностью позиционирования врачом.
[00277] В некоторых вариантах осуществления, система управления откачиванием с фильтром для откачивания хирургического дыма может быть объединена с системой, и шланг/насадка (или насадки) для откачивания могут позиционироваться системой отдельно от подголовника вручную или автоматически на каретке или другом устройстве.
[00278] В некоторых вариантах осуществления, подголовник может включать в себя автоматизированную систему сопряжения с глазом для поддержки позиционирования глаза пациента для каждого квадранта и удерживания его в неподвижном положении. Это может осуществляться с помощью или без помощи врача.
[00279] Фиг. 88 и 89 представляют примерный вспомогательный компонент приставки к глазу в лазерной системе, который может помогать при разведении век в открытое положение для воздействия на зоны лечения, придерживании движения глаза, защите зрачка от побочных излучений лечебного лазера и содействовать направлению взгляда пациента в далекие внеосевые точки фиксации.
[00280] ПРОЦЕДУРА И МЕХАНИЗМ ДЕЙСТВИЯ СИСТЕМЫ
[00281] Фиг. 19 и 20, и 27 представляют примерные процессы формирования микропор(ы) в некоторых вариантах осуществления.
[00282] В некоторых вариантах осуществления, процедура лазерной терапии может использовать эрбиевый лазер на иттрий-алюминиевом гранате (Er:YAG-лазер) для создания микропор в ткани глаза, например, склере. Данные микропоры могут формироваться на множество глубин, с предпочтительным диапазоном глубин, например, 5%-95% толщины склеры, вплоть до точки, в которой почти видна синяя окраска сосудистой оболочки. Микропоры можно формировать в виде множества совокупностей, включающих в себя матрицу, например, 5 мм × 5 мм, 7 мм × 7 мм или 14 мм × 14 мм. Данные матрицы микропорации разрывают связи в фибриллах и микрофибриллах склеры, что создает эффект «расшивки» в склеральной ткани. Прямым результатом данной матричной картины может быть создание зон как позитивной жесткости (остающейся промежуточной ткани) и негативной жесткости (удаленной ткани или микропор) в ригидной склере. Данные зоны различающейся жесткости делают возможным, чтобы модуль вязкоупругости склеры после лечения был более эластичным в критических зонах, при воздействии усилия или нагрузок, например, сокращении цилиарных мышц. Кроме того, подвергнутые лечению области склеры могут создавать эффект амортизации в ригидной склеральной ткани, когда сокращаются цилиарные мышцы, благодаря повышению пластичности. Это увеличивает аккомодационное усилие за счет беспрепятственного направления усилий внутрь и по центру вращения к хрусталику или облегчения перемещения внутрь и вверх аккомодационного механизма. Это дает преимущество над моделями, которые предполагают действие направленного наружу результирующего усилия на экваторе хрусталика. Например, методы, которые имеют целью расширение склеры, например, склеральные имплантаты или радиальные абляции хирургическим лазером, например, LAPR, предназначены для увеличения «промежутка» или околохрусталикового промежутка, чтобы позволить склере расширяться для предоставления свободного места цилиарным мышцам. Упомянутые методы основаны на теории «стеснения хрусталика» и нацелены на поддержку перемещения наружу вместо перемещения вверх и внутрь склеры и цилиарного механизма. В общем, создание матриц микропор в склеральной ткани может вызвать «эффект расшивки», разрывающий фибриллы и микрофибриллы слоев склеры и допускающий более эластичную реакцию на прилагаемое напряжение. Таким образом, механизм действия по настоящему изобретению может повышать пластичность и эластичность склеральной ткани в пределах анатомически значимых, критических зон посредством создания упомянутых областей различной жесткости в пределах цилиарного комплекса, и тем самым повысить биомеханическую функцию и эффективность аккомодационного аппарата. Фиг. от 2C-1 до 2C-4 заявки США № 15/942,513 поясняют лазерную склеральную расшивку фибрилл и микрофибрилл склеры и включены в настоящую заявку.
[00283] В некоторых вариантах осуществления, оптическая схема системы может фокусировать расходящийся пучок лечебного лазера в отдельный сходящийся пучок, который направляется в место конкретной поры на рабочем расстоянии вплоть до 250 мм. Большое рабочее расстояние, >100 мм, обеспечивает, для пользователя, линию прямой видимости до глаза до, во время и после лечебного воздействия и, для пациента, более уверенное ощущение бесконтактного лечения. Требование больших рабочих расстояний для Er:YAG-лазера с длиной волны 2,94 мкм не позволила применять лазер с данной длиной волны в коммерческих автоматизированных лазерных системах с большей свободой рук. В настоящее время, почти все из коммерческих систем на базе 2,94-мкм Er:YAG-лазера являются либо ручными, либо подаваемыми шарнирно-сочлененной консолью, с наилучшим рабочим расстоянием облучения меньше, чем 500 мум и средним рабочим расстоянием облучения 3-4 мм. В некоторых вариантах осуществления, наилучшее рабочее расстояние облучения превышает 100 мм и среднее рабочее расстояние облучения составляет 100-200 мм, что допускает бесконтактные лазерные лечебные воздействия без ручного вмешательства.
[00284] В некоторых вариантах осуществления, система может формировать пучки с множеством форм и размеров на целевой фокальной плоскости посредством (1) подвижных оптических компонентов вдоль оптической оси, (2) смены дифракционного делителя пучка, включенного в оптический путь, или сочетания обоих данных методов.
[00285] Соединительные ткани глаза, как и все другие соединительные ткани, испытывают влияние возраста. Склера составляет 5/6 глазного яблока и образована плотной нерегулярной соединительной тканью. Данная ткань состоит из, главным образом, коллагена (50-75%), эластина (2-5%), и протеогликанов. Соединительные ткани глаза делаются негибкими при старении, теряя свою эластичность, в основном, вследствие кросслинкинга, который происходит с возрастом. Кросслинкинг вызывает «повышение биомеханической жесткости» в соединительных тканях, например, в глазу. Сшивки являются связями между полимерными цепочками, например, полимерными цепочками в синтетических биоматериалахь или белках в соединительных тканях. Кросслинкинг может вызываться свободными радикалами, воздействием ультрафиолетового света и старением. В соединительных тканях, коллаген и эластин могут сшиваться с непрерывным формированием фибрилл и микрофибрилл с течением времени. С ростом количеств фибрилл и микрофибрилл, склера делается негибкой, претерпевает «склеросклероз», а также сопутствующее повышение метаболической физиологической нагрузки. При прогрессировании данной патофизиологии, склера оказывает нажим на нижележащие структуры и вызывает в них напряжение от нагрузки, с созданием биомеханической дисфункции, особенно такой, которая связана с аккомодацией. Лазерная микропорация склеры разрывает фибриллы и микрофибриллы склеры, эффективно «расшивая» связи и, тем самым, повышая эластичность склеры и «снижая биомеханическую жесткость.
[00286] Как можно доказать, биомеханические улучшения с помощью лечения повышают биомеханическую эффективность аккомодационного аппарата. В некоторых вариантах осуществления, лечение посредством формирования микропор в виде матрицы в четырех косых квадрантах может восстановить функциональные внехрусталиковые усилия и восстановить, минимум, 1-3 диоптрий аккомодации. Лечение с использованием системы и способов по настоящему изобретению может показывать среднее восстановление 1,5 диоптрий аккомодации после операции. Это значительно повышало остроту зрения пациентов.
[00287] Применение ранее недоступных новаторских технологий биометрии и визуализации объяснило, что потеря аккомодационной способности при пресбиопии обусловлено многими составляющими хрусталиковыми, а также внехрусталиковыми и физиологическими факторами. Хрусталик, капсула хрусталика, сосудистая оболочка, стекловидное тело, склера, цилиарные мышцы и зонулярные связки, все играют решающую роль при аккомодации и подвергаются изменениям при старении. Повышение ригидности глаза с возрастом создает напряжение и деформацию упомянутых глазных структур и может отрицательно сказаться на аккомодационной способности.
[00288] Лечение склеры может иметь большое значение в ходе лечения биомеханических дефектов при пресбиопии, обеспечивая, по меньшей мере, одно средство, учитывающее действительную этиологию клинического проявления ухудшения аккомодации, обнаруживаемой с возрастом. Лечение, использующее лазерную микропорацию склеры для восстановления более эластичных биомеханических свойств, является безопасной процедурой и может восстанавливать аккомодационную способность у стареющих взрослых пациентов. В результате, лечение может расширить динамический диапазон аккомодации, а также улучшить отток водянистой влаги. С появлением усовершенствованных методов биометрии и визуализации и концентрацией исследовательских усилий, можно получать информацию о том, как работает аккомодационный комплекс, и как он влияет на весь орган зрения.
[00289] В некоторых вариантах осуществления, процедура лазерной микропорации склеры может включать применение вышеописанного лазера, чтобы выполнять микроабляции в склере на ее частичную толщину в виде матрицы в пяти критических анатомических зонах, например, в 0-7,2 мм от анатомического лимба (AL). В некоторых вариантах осуществления, пять зон могут включать в себя: зону 0) 0,0-1,3 мм от AL; расстояние от AL до верхней границы цилиарной мышцы/склеральной шпоры; зону 1) 1,3-2,8 мм от AL; расстояние от склеральной шпоры до нижней границы кольцевой мышцы; зону 2) 2,8-4,6 мм от AL; расстояние от нижней границы кольцевой мышцы до нижней границы радиальной мышцы; зону 3) 4,6-6,5 мм от AL; от нижней границы радиальной мышцы до верхней границы задней зоны зонулярной связки стекловидного тела; и зону 4) 6,5-7,2 мм от AL; от верхней границы задней зоны зонулярной связки стекловидного тела до верхней границы между зрительной и слепой частями сетчатки.
[00290] Как описано в настоящей заявке, аккомодация человеческого глаза может происходить за счет изменения или деформации хрусталика, когда глаз перефокусируется с дальнего расстояния на ближнее расстояние. Такое изменение хрусталика может вызываться сокращением внутриглазных цилиарных мышц (цилиарного тела), которое ослабляет усилие натяжения хрусталика поддерживающими зонулярными волокнами и допускает увеличение толщины и кривизны поверхности хрусталика. Цилиарная мышца может иметь кольцевую форму и может состоять из трех отдельно ориентированных групп цилиарных волокон, которые сокращаются к центру и в переднюю сторону глаза. Упомянутые три группы цилиарных волокон известны как продольная, радиальная и кольцевая. Деформация цилиарной мышцы вследствие сокращения разных волокон мышцы превращается в или иначе вызывает изменение усилия натяжения поверхности хрусталика зонулярными волокнами, чьи сложные картины прикрепления к хрусталику и цилиарной мышцы обуславливают результирующие изменения хрусталика во время аккомодации. Сокращение цилиарной мышцы прилагает также биомеханическое напряжение в местах соединения между цилиарной мышцей и склерой глаза, известной также белая наружная оболочка глаза. Кроме того, биомеханические сжатие, деформация или напряжение могут вызываться во время того, как в местах соединения между цилиарной мышцей и сосудистой оболочкой, известной как внутренний слой соединительная ткань между склерой и сетчаткой глаза, может происходить аккомодация. Сокращение цилиарной мышцы может также вызывать действие биомеханических усилий на трабекулярную сеть, решетчатую пластинку, сетчатку, оптический нерв и, фактически, каждую структуру в глазу.
[00291] В некоторых вариантах осуществления, применение методов и моделей, описанных для различных вариантов осуществления в настоящей заявке, с использованием численного моделирования может приводить к выходным данным и результатам, которые находятся в пределах известных диапазонов аккомодации молодого взрослого человека.
[00292] Математические 3D модели могут включать в себя математические соотношения и нелинейные неогуковские свойства для восстановления характеристик структур, имеющих биомеханическое, физиологическое, оптическое и клиническое значение. Кроме того, 3D FEM (конечно-элементные модели) модели могут включать в себя данные из изображений, литературы и программного обеспечения, относящегося к человеческому глазу.
[00293] Визуализацию аккомодационных структур до и после численного моделирования можно включать в дополнение к средствам измерения, оценки и прогнозирования оптической силы в центральной зоне (COP). Их можно использовать для численного моделирования и наблюдения характерных возрастных структур, оптической системы и биомеханики всего глаза. Кроме того, они могут независимо моделировать свойства цилиарной мышцы, внехрусталиковые и хрусталиковые перемещения хрусталика и функции хрусталика. Отдельные численные моделирования анатомических структур и волокон могут показывать биомеханические взаимосвязи, которые иначе останутся неизвестными и неопределенными. Численное моделирование глаза пациента может выполняться с использованием 3D конечно-элементной сетки (FEM-сетки) для выполнения данных операций.
[00294] Для исследования, репрезентативную 3D геометрию глазных структур в состоянии покоя можно определить путем вычислений, на основании подробного анализа опубликованных данных измерений и медицинских изображений анатомии глаз молодого взрослого человека, и посредством моделирования. Для определения геометрической сетки, свойств материалов и граничных условий и анализа методом конечных элементов на стадии моделирования можно использовать специальные способы, реализованные в таком программном обеспечении, как программное обеспечения AMPS (AMPS Technologies, Питтсбург, шт. Пенсильвания, США). Цилиарную мышцу и зонулярные связки можно представить как поперечно-изотропный матиериал с ориентациями, заданными для представления сложно-направленных волокон. Кроме того, для формирования траекторий волокон, которые можно затем отобразить на геометрической модели, можно выполнить вычислительное гидродинамическое моделирование.
[00295] Сначала моделирование хрусталика может включать в себя хрусталик в расслабленной конфигурации, до растягивания предварительным натяжением зонулярных волокон в неаккомодированные положение и форму. Неаккомодированное положение хрусталика может достигаться, когда зонулярные связки укорачиваются, например, до 75% и 80% от их начальной длины и конкретнее, до приблизительно 77% от их начальной длины. Затем аккомодационное движение можно моделировать выполнением активного сокращения различных волокон цилиарной мышцы. В некоторых вариантах осуществления, это можно выполнить с использованием предшествующих моделей скелетной мышцы, которые изменяют для представления динамики, характерной или иначе специфичной или индивидуальной для цилиарной мышцы. Результаты расчетов на модели, представляющие перемещение хрусталика и передней секции цилиарной мышцы и толщину деформированного хрусталика на средней линии и в вершине, можно проверить или иначе подтвердить путем их сравнения с имеющимися данными измерений по аккомодации, опубликованными в медицинской литературе. С целью изучения долевого участия различных групп цилиарных волокон в общем действии цилиарной мышцы можно выполнить численные моделирования для каждой группы волокон посредством активизации каждой группы по-отдельности в то время, когда другие остаются пассивными или иначе неизменными.
[00296] Различные полезные аспекты нижеописанных вариантов осуществления описаны, принимая во внимание численное моделирование, применяющее модели предварительного натяжения зонулярных связок и модели сокращения цилиарной мышцы.
[00297] В отношении предварительного натяжения зонулярных связок, моделирование может включать в себя: 1) формирование тонких слоев 3D материала, ориентированных между измеренными точками прикрепления вставок зонулярных волокон на хрусталике и началом на цилиарном теле/сосудистой оболочке; 2) заданное направление волокон в плоскости тонкого слоя (например, волокон, направленных от начала к вставке); и 3) поперечно-изотропный образующий материал с созданием натяжения в предпочтительном направлении. Кроме того, что особенно касается 3), получены следующие преимущества: a) ввод изменяющегося во времени параметра натяжения регулирует напряжение, развивающееся в материале; b) ввод изменяющегося во времени натяжения можно настраивать для создания требуемой деформации в хрусталике, согласующейся с измерениями неаккомодированной конфигурации; c) возрастное изменение свойств и геометрических характеристик для получения влияния возраста; и d) прочие. Заявки США 15/638,346 и 16/702,470, включенные в настоящую заявку, подробно описывают моделирование полной FEM аккомодации человеческого глаза.
[00298] В отношении моделей сокращающихся цилиарных мышц, моделирование может включать в себя: 1) модифицированную структурную модель для представления гладких и структурных аспектов механического отклика цилиарного тела; 2) множество, например, 3, наборов заданных направлений волокон для представления физиологической ориентации мышечных клеток и линий действия создаваемого усилия; и 3) поперечно-изотропный образующий материал с созданием действующего усилия в предпочтительном направлении. Кроме того, в отношении, конкретно, 3), полученные преимущества, включают в себя: a) входные данные параметра активизации регулируют активное напряжение, создаваемое в материале; b) входные данные активизации можно настраивать для формирования подходящей реакции аккомодации, согласующейся с данными измерений, опубликованными в литературе; c) активизацию отдельных групп мышечных волокон можно изменять по-отдельности, чтобы оценить долевое участие в деформации/напряжении хрусталика; d) активизацию отдельных групп мышечных волокон можно изменять по-отдельности, чтобы оценить долевое участие в деформации/напряжении склеры глаза; e) активизацию отдельных групп мышечных волокон можно изменять по-отдельности, чтобы оценить долевое участие в деформации/напряжении сосудистой оболочки; и f) другие.
[00299] В различных вариантах осуществления, результаты моделирования могут быть обусловлены изменением натяжений и активизаций, подводимых к зонулярным и цилиарным материалам, в отличие от создания смещения, приложенного к внешнему(им) узлу(ам) сетки.
[00300] В дальнейшем раскрываются системы, способы и устройства для обеспечения прогнозируемого выходного результата в форме компьютерной 3D модели с встроенным искусственным интеллектом (ИИ) можно использовать для поиска наилучших прогностических инструкций для лечебной коррекции зрения, регулирования или исправления дефектов зрения пациента, глазного заболевания или возрастной дисфункция. Наилучшие прогностические инструкции могут быть получены в результате ввода физических структур, численного моделирования нейронных сетей и ожидаемого влияния на терапевтический эффект. Для обеспечения различных полезных результатов, новую информацию можно анализировать в связи с оптимизированной ретроспективной информацией по терапевтическим эффектам. Концепции настоящей заявки можно использовать для выполнения множества операций численного моделирования и включения платформы на основе базы знаний, чтобы система могла совершенствовать свои ответные инструкции по мере того, как расширяется база данных. Концепции настоящей заявки могут также использовать ИИ, чтобы создавать прогрессирующие возрастные численные модели намеченных тканей и клинических проявлений болезненных состояний для связывания планирования лечения с результатами.
[00301] В некоторых вариантах осуществления, хранящиеся предполагаемые инструкции предпочтительно могут быть оптимизированным специальным алгоритмом микропорации для управления микроперационным лазером. Инструкции могут обеспечиваться вместе с процессором ИИ посредством прямой интеграции, самостоятельного импорта или дистанционно, например, по Bluetooth или другому приложению или соединению беспроводной связи. Данные инструкции могут выполняться предварительно или во время операции.
[00302] В некоторых вариантах осуществления, хранящиеся предполагаемые инструкции предпочтительно могут быть оптимизированным специальным алгоритмом численного моделирования хрусталика, применяемым для моделирования манипуляции с имплантируемой интраокулярной линзы с целью совершенствования медицинских процедур и представления.
[00303] Инструкции могут быть также составлены как «атономная» система, вследствие чего инструкции могут представляться с независимыми входными и выходными данными схемы исследований для тестирования различных состояний и реакций глаза на хирургические манипуляции, имплантируемые устройства или другие терапевтические воздействия на глаз, чтобы оптимизировать расчетную и полученную характеристики.
[00304] Кроме того, данные инструкции могут также включать в себя что-то одно или более из: алгоритма для интерпретации обработки изображений, расширения платформ обработки данных визуализации в офтальмологии и сопутствующей диагностике для устройства визуализации.
[00305] Как описано в настоящей заявке, способы совершенствования видов лечения, хирургических операций или фармакологических воздействий в офтальмологии могут содержать получение топологических, топографических, структурных, физиологических, морфологических, биомеханических свойств, характеристик материала и оптических данных для человеческого глаза, вместе с прикладными физическими процессами и анализом методом математического моделирования с использованием разветвленных систем искусственного интеллекта.
[00306] В некоторых вариантах осуществления приложения, использующие численное моделирование могут включать в себя методы, выполняемые устройствами, системами и способами для автоматизированного планирования офтальмологической хирургической операции, включая получение данных физических измерений и прикладных физических процессов всего глаза пациента. Методы, известные в данной области, можно использовать для получения данных измерений. Информацию, полученную измерениями, можно интерполировать и экстраполировать, чтобы подбирать узлы конечно-элементной модели (FEM) человеческого глаза для анализа, которую затем можно анализировать для прогнозирования начального напряженного состояния глаза и получения предоперационных состояний роговицы, хрусталика и других структур. В модель анализа методом конечных элементов можно включать данные о разрезе, составляющие «начальный» план операции. Затем можно выполнить новый анализ, чтобы моделировать получаемые деформации, биомеханические эффекты, напряжения, деформации, значения кривизны глаза, а также динамические перемещения глаза, в частности, цилиарных мышц, хрусталика и аккомодационных структур. Их можно сравнить с исходными значениями и целевыми показателями зрения. При необходимости, план операции можно модифицировать, и новые полученные данные абляции можно ввести в FEM и повторить анализ. Данную процедуру можно повторять, при желании или необходимости, пока не достигаются целевые показатели зрения.
[00307] Искусственный интеллект и численное моделирование
[00308] В некоторых вариантах осуществления, программное обеспечение искусственного интеллекта (ИИ) может использовать обучающуюся машину, например, искусственную нейронную сеть, чтобы проводить машинное обучение, вследствие чего система может учиться по данным и поэтому содержит обучающийся компонент, базирующийся на непрерывном расширении базы данных. Это можно применять для повышения надежности, когда база данных создается и обновляется, что до настоящего было неизвестно в предыдущих прогнозирующих системах, способах и устройствах 3D моделирования.
[00309] Численное моделирование может включать в себя численное моделирование возрастного развития глаза пациента, обладающее предиктивной способностью моделировать результаты офтальмологической хирургической операции, определять скорости ремиссии от лечения, а также выполнять прогнозирующие алгоритмы для хирургических или терапевтических усовершенствований в будущем, что до настоящего было неизвестно в предыдущих прогнозирующих системах, способах и устройствах 3D моделирования.
[00310] В некоторых вариантах осуществления, системы по настоящему изобретению могут включать в себя анализатор виртуального моделирования глаза, который может включать интеграцию информации, относящейся ко всем структурам глаза, в компьютерной программе с целью численного моделирования биомеханического и оптического функционирования глаза, а также численного моделирования возрастных изменений для применения в клинической практике. Дополнительные сведения об анализаторе виртуального моделирования глаза приведены в заявке США № 15/942,513 и включены в настоящую заявку.
[00311] Симулятор может объединять математические соотношения и нелинейные неогуковские свойства для восстановления характеристик биомеханически, физиологически и оптически значимых структур и других структур, которые могут быть важными или иначе имеющими клиническое значение. Симулятор может использовать способы, известные в данной области, чтобы вводить данные, включаемые в 3D FEM, со специфическими данными пациента на основании анализа его собственного(ых) глаза или глаз. Кроме того, симулятор может использовать способы, известные в данной области, чтобы вводить данные и создавать численную модель глаза пациента с использованием a 3D FEM-сетки, т.е. по существу, создавать индивидуализированный динамический «виртуальный глаз» в режиме реального времени, что до настоящего было неизвестно в предыдущих прогнозирующих системах, способах и устройствах 3D моделирования.
[00312] В некоторых вариантах осуществления, ИИ может обладать способностью к обучению путем прогностического численного моделирования и функциональной возможностью совершенствования результатов модельного прогнозирования для хирургических или терапевтических воздействий на глаз посредством обучающейся машины, такой как искусственные нейронные сети, например, в программе «ABACUS». Данная программа может также представлять инструкции непосредственно в коммуникационно связанный(ую) процессор или систему обработки данных с целью создания и применения алгоритмов, математического упорядочения, составления формул, профайлинга данных, выбора хирургических решений и прочего. Она может также представлять инструкции непосредственно в рабочую станцию, систему обработки изображений, контроллер роботизированных систем или другое устройство для исполнения. Кроме того, она может также представлять инструкции не напрямую, посредством Bluetooth или другого удаленного соединения, в контроллер роботизированных систем, систему визуализации или другую рабочую станцию.
[00313] Модели по настоящей заявке могут находить различные применения в клинической, исследовательской и хирургической практике, включая: 1) применение предварительной оценки и численного моделирования аккомодационных функций глаза (примеры включают в себя расчет и применение ИОЛ (интраокулярной линзы) по признаку пресбиопии, внехрусталиковые медицинские препараты и их применение); 2) применение предварительной оценки и численного моделирования циркуляции внутриглазной жидкости, например, для выявления глаукомы; 3) построение виртуальных численных моделей и численных моделей эффективности ИОЛ, терапевтического лечения и различных биомеханических аспектов; 4) виртуальное численное моделирование с использованием ИИ и машинного интеллекта (МИ) для воспроизведения индивидуализированного влияния старения на биомеханическую и физиологическую функции глаза пациента, которые имеют клиническое значение; 5) планирование хирургической операции; 6) импорт и численное моделирование расчетной модели (например, FEM), например, для ИОЛ и других структур; 7) виртуальные клинические испытания и анализ; 8) интраоперационный анализ в реальном времени, планирование и выполнение хирургической операции; 9) действие хрусталика глаза в том, как оно связано с оптической и биомеханической дисфункцией, образованием катаракты и тому подобное; и 10) прочее.
[00314] В некоторых вариантах осуществления изобретения может применяться узел двухосевой замкнутой гальванометрической оптической системы.
[00315] В некоторых вариантах осуществления, лазерная система может включать в себя систему коррекции видеокамеры с гальванометрическими зеркалами, которая дополнительно подробно поясняется на фиг. 3C заявки США № 15/942,513, которая включена в настоящую заявку. Фиг. 3D заявки США № 15/942,513 представляет примерную блок-схему процесса работы датчика движения глаза на базе видеокамеры, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00316] В некоторых вариантах осуществления, как дополнительно подробно поясняется на фиг. 4A в заявке США № 15/942,51, включенной в настоящую заявку, лазерная система может включать в себя лечебный лазер, излучающий лазерный пучок, который проходит через промежуточную линзу к дихроичному зеркалу или зеркально отражается.
[00317] Фиг. 4B-1 в заявке США № 15/942,513, включенной в настоящую заявку, показывает примерную систему лазерного лечения, образующую глубину поры в соответствии с некоторыми вариантами осуществления настоящего изобретения. Фиг. 4B-1 представляет, в общем, пучок лечебного лазера, проходящий к дихроичному зеркалу до прохода к первому гальванометрическому зеркалу, затем ко второму гальванометрическому зеркалу, через фокусирующую оптическую систему и к глазу пациента. Фиг. 4A-1-4A-10 в заявке США № 15/942,513 показывают, как можно применять микропорацию/нанопорацию для удаления поверхностной, подповерхностной и промежуточной тканей и воздействия на поверхностные, внутритканевые, биомеханические характеристики (например, планарность, поверхностную пористость, геометрию ткани, вязкоэластичность ткани и другие биомеханические и биореологические характеристики) аблируемой целевой поверхности или целевой ткани.
[00318] В некоторых вариантах осуществления может применяться система оптической когерентной томографии (OCT) для получения подповерхностных изображений глаза. По существу, при наличии связи с компьютером, который подсоединен к видеомонитору, система дает пользователю или оператору возможность наблюдать подповерхностные изображения абляция ткани. Как отмечается в настоящей заявке, пора может иметь глубину от 5% до 95% от толщины склеры в 3-мерном пространстве, при средней толщине склеры 700 мкм, представляющую типичную глубину пор. Лазерная микропорация может выполняться на глубину больше, чем рефракционная операция поверхностной абляции, выполняемая на глубину от 200 мкм до 300 мкм, и на несколько порядков величины глубже по сравнению с другими рефракционными поверхностными абляционными операциями, которые выполнялись на роговичной ткани и, обычно, на глубину от 10 мкм до 45 мкм в среднем и, в общем, >120 мкм (смотри фиг. 139A и 139B).
[00319] В, по меньшей мере, некоторых вариантах осуществления, система может обеспечивать режим просмотра в ходе операции в реальном времени уровней глубины в ткани. Система может предусматривать сегментацию изображения, чтобы выявлять внутреннюю границу склеры для совершенствования контроля глубины.
[00320] Фиг. 4A-5 и 4B-2 заявки США № 15/942,513 представляют примерные упрощенные схемы абляционной поры в склере, показывающие пример глубины абляции по отношению к внутренней границе склеры, и включены в настоящую заявку.
[00321] Фиг. 5 заявки США № 15/942,513 представляет примерную блок-схему последовательности операций процесса контроля глубины в соответствии с некоторыми вариантами осуществления настоящего изобретения и включена в настоящую заявку.
[00322] В общем, система контроля глубины, например, система OCT, выполняет повторяющееся сканирование в B-режиме, синхронизированное с лазером. Сканирование в B-режиме может показывать верхнюю поверхность конъюнктивы и/или склеры, границы аблируемой поры и нижнюю границу раздела между склерой и сосудистой оболочкой или цилиарным телом. Для идентификации верхней и нижней поверхностей склеры (например, толщиной 400-1000 микрометров) и границ аблируемой поры можно использовать алгоритмы автоматической сегментации изображения. Расстояние от верхней поверхности склеры до нижей поверхности поры может автоматически вычисляться и сравниваться с локальной толщиной склеры. В некоторых вариантах осуществления, это происходит в реальном времени. Когда глубина поры достигает предварительно заданного(ой) размера или доли толщины склеры, абляция может быть прекращена, и система сканирования дискретно переведена в следующее целевое место абляции. В некоторых вариантах осуществления изображения могут сегментироваться для идентификации внутренних границ склеры.
[00323] Как показано на этапах на фиг. 5 (заявка США № 15/942,513), в примерном варианте осуществления, в первую очередь может осуществляться начальная или инициализирующая последовательность этапов. Данная начальная последовательность этапов начинается с установки координат поры на этапе 412. На этапе 414 осуществляется сканирование в AB-режиме целевой области. Данное сканирование формирует изображение, которое обрабатывается на этапе 416 с целью сегментации и идентификации границы склеры. Затем на этапе 418 вычисляется расстояние между поверхностью конъюнктивы и границей склеры.
[00324] После завершения данной начальной последовательности этапов, на этапе 420 может начинаться абляция. Возбуждается лазерный пучок, после чего выполняется сканирование в B-режиме на этапе 422. Данное B-сканирование формирует изображение, которое затем может сегментироваться на этапе 426, и по изображению вычисляются глубина поры и скорость абляции. Данные глубина поры и скорость абляции сравниваются с целевой глубиной на этапе 430. Если целевая глубина не достигнута, то процесс возвращается на этап 422 и повторяется. После достижения целевой глубины, этап 432 прекращает процесс абляции, и на этапе 434 снова начинается начальный процесс с установки координат следующей поры. В некоторых вариантах осуществления, система контроля глубины может контролировать глубину абляции в течение одного импульса и может прекращать абляцию для снижения риска, и при этом могут также происходить другие внутренние процессы, которые могут прекращать абляцию, если процесс выходит из заданного диапазона; превышены рабочие пределы слежения за движением глаза, превышено максимальное предварительно настроенное число импульсов, контролируемая мощность лазера выходит из заданных пределов. Все перечисленное служит средствами снижения риска.
[00325] В некоторых вариантах осуществления настоящего изобретения могут применяться матрицы лазерных пятен для одновременной абляции нескольких пор. Данные матрицы лазерных пятен могут, в некоторых случаях, формироваться микролинзами, а также определяться характеристиками лазера. Увеличение длины волны может приводить к уменьшению числа лазерных пятен, с увеличением диаметра пятна.
[00326] Что касается некоторых других аспектов настоящего изобретения, во многих вариантах выгодно осуществлять предоперационное измерение характеристик глаза и индивидуализацию лечения соответственно потребностям отдельного пациента. Предоперационное измерение характеристик глаза может включать в себя измерение внутриглазного давления (IOP), толщины склеры, напряжения/деформации склеры, сосудистой сети переднего сегмента, реакция аккомодации и аномалии рефракции. Измерение толщины склеры может включать в себя применение оптической когерентной томографии (OCT). Измерение напряжения/деформации склеры может включать в себя применение рассеяния Бриллюэна, эластографии методом OCT, фотоакустики (свет плюс ультразвук). Измерение сосудистой сети переднего сегмента может включать в себя применение OCT или допплеровской OCT. Измерение аномалии рефракции может включать в себя применение такого оборудования, как изделие с товарным знаком iTrace, компании Tracey Technologies Corp.. Средним специалистам в данной области будет понятно, что применимы также другие измерения, способы и системы.
[00327] В ходе процедуры лечения, большое значение могут иметь петли интраоперационной биологической обратной связи, чтобы держать врача в курсе относительно хода операции. Такие петли обратной связи могут включать в себя применение топографических измерений и контроль зон «обхода», таких как передние цилиарные артерии.
[00328] Петли биологической обратной связи могут включать в себя датчик обратной связи для коррекции нелинейности в механизме пьезо-сканирования. Датчик в некоторых вариантах осуществления может обеспечивать позиционную обратную связь в реальном времени, например, в течение нескольких миллисекунд и использовать емкостные датчики для позиционной обратной связи в реальном времени. Петля позиционной обратной связи в реальном времени может быть связана с контроллером и, при идентификации определенных биологических признаков на основании характеристик ткани, может останавливать работу лазера во время операции.
[00329] Устройство обратной связи с датчиком может также выполнять биологическое или химическое «интеллектуальное зондирование», чтобы допускать абляцию целевой ткани и защищать окружающую ткань или обходить ее. В некоторых случаях, интеллектуальное зондирование может выполняться с помощью встраивания биочипа в маску, который активизируется при слабом облучении и обнаруживает местоположение, глубину, размер, форму или другие параметры профиля абляции. В некоторых вариантах осуществления предполагается применимость гальванометрических оптических систем, которые можно использовать для измерения многочисленных параметром управления лазерным лучом и специальной функции.
[00330] Средним специалистам в данной области будет понятно, что можно также применить другие способы и системы обратной связи.
[00331] В некоторых вариантах осуществления системы, способы и устройства по настоящему изобретению могут включать возможности передачи экранного изображения в GUI, которые могут включать в себя получение каждого кадра изображения и передачу информации на видеодисплей после каждой абляции внутри 3-7-размерной микропоры до и после лазерного импульса в режиме реального времени, и изображение поверхности. GUI может содержать встроенную систему одновременного просмотра 7 представлений для записанных изображений, включая: поверхность, внутреннюю пору, внешнюю пору, нижнюю часть микропоры, изображение всего глазного яблока, зону целевой матрицы.
[00332] В некоторых вариантах осуществления, предпочтительной проекцией для микропроцессора может быть 7-гиперкуб, но существуют другие примеры в объемной сферической форме, включаемые в GUI и микропроцессор. Ортогональные проекции могут включать в себя примеры, показано на фиг. 8 заявки США № 15/942,513.
[00333] В некоторых вариантах осуществления, в разветвленную систему ИИ (искусственного интеллекта), относящуюся к микропроцессорному тракту, может быть включена возможность распознавания образов на основе метода опорных векторов. Для задачи нелинейной классификации, SVM может преобразовывать пространство ввода в многомерное пространство посредством нелинейного преобразования K(X). Следовательно, нелинейная задача может превращаться в линейную задачу, и затем в новом многомерном пространстве будет вычислена оптимальная разделяющая гиперплоскость, например, с помощью интегрированных программных средств Matlab или Mathematica. Дополнительные сведения приведены в заявке США № 15/942,513.
[00334] Некоторые варианты осуществления могут использовать расслоение Серра или слабое расслоение. Они способны создавать отображение каждой цилиндрической микропоры в матрице и всей матрицы на 3D поверхности и внутритканевое отображение матриц пор в сечении. Примерное 3D отображение 900 показано на фиг. 9 заявки США № 15/942,513.
[00335] Фиг. 10 заявки США № 15/942,513 изображает, в соответствии с некоторыми вариантами осуществления настоящего изобретения, примерные схемы проектирования, которые могут выполняться следующим образом. Этап 1001: Создание схемы/планирование лечения может начинаться с иерархии тканей, которая устанавливается с использованием математической проекции 7-сферы на всю сферу, чтобы создать конгруэнтную лечебную платформу, базирующуюся на 7-мерной форме и гиперболической планарной мозаике. Этап 1002: Внеосевой математический алгоритм, полученный на основе иерархии тканей и формировании узора Фибоначчи, отображается как математическое изображение. Этап 1003: Затем реализуется алгоритмический код для разработки специальных узоров микропорации, которые отражают биореологию тканей, включая все входные данные жесткости, модуля вязкоупругости, топологии, топографии, биометрии и т.п. Этап 1004 (не показанный): Программное обеспечение для обхода анатомических структур может выполняться для стирания или исключения нецелевых полей, матриц, областей. Этап 1005 (не показанный): Хирург/пользователь может также манипулировать целевыми или нецелевыми зонами посредством интерфейса с сенсорным экраном.
[00336] В некоторых вариантах осуществления, описанные системы, способы и устройства по настоящему изобретению могут включать в себя следующие возможности выдачи алгоритмов лечения лазерной системой пользовательского интерфейса. Математическое изображение в реальном времени включается в состав и представляется в виде 3D математических файлов, которые могут также выполняться в формате GIF-анимации, чтобы отображать априорную информацию, относящуюся к эффективности матрицы. Рабочая станция/алгоритмя работают совместно с системой VESA, чтобы создавать для пользователя/хирурга математическое изображение идеальной конфигурации 3D матрицы на глазу. Топологическое представление изображения стереографически проецируется на дисплее. Матрица выражается предварительно установленными формулами и, кроме того, может моделироваться в виде ряда Фибоначчи с использованием множества плотностей, размеров пятен, геометрических характеристик и конфигураций микро- и нанопор. Преимущество ряда Фибоначчи состоит в том, чтобы создать наиболее сбалансированную формулу матрицы, которая соответствует собственной естественной иерархии тканей тела как в макро-, так и в микромасштабах.
[00337] Матрица может также соответствовать модели гиперболической геометрии или однородной (регулярной, квазирегулярной или полурегулярной) гиперболической мозаики, которая является состыкованным без зазора замощением гиперболической плоскости, которая содержит правильные круги или многоугольники в качестве граней и является вершинно-транзитивной (транзитивной на ее вершинах, изогональной, т.е., существует изометрическое отображение любой вершины на любую другую вершину). Примеры показаны на фиг. 10 и 11 заявки США № 15/942,513 и включены в настоящую заявку. Из этого следует, что все вершины являются конгруэнтными, и мозаика имеет высокий порядок вращательной и трансляционной симметрии.
[00338] Равномерные мозаики можно идентифицировать по конфигурации их вершин, последовательности чисел, представляющих число сторон кругов или многоугольников вокруг каждой вершины. Один нижеприведенный пример представляет семиугольную мозаику, которая содержит 3 семиугольника вокруг каждой вершины. Она также является регулярной, так как все круги или многоугольники имеют один размер, и поэтому ей можно присвоить символ Шлефли.
[00339] Равномерные мозаики могут быть регулярными (если также являются гране- и реберно-транзитивными), квазирегулярными (если являются реберно-транзитивными, но не являются гране-транзитивными) или полурегулярными (если не являются не реберно-, ни гране-транзитивными). Для прямоугольных треугольников (p q 2) существуют две регулярных мозаики, представленные символом Шлефли {p, q} и {q, p}.
[00340] В некоторых вариантах осуществления, описанные системы, способы и устройства по настоящему изобретению могут включать в себя механизм создания матрицы микропоры, в которой узор из множества микропор может иметь регулируемое неравномерное распределение или равномерное распределение, или случайное распределение и может быть одним из радиального узора, спирального узора, филлотактического узора, асимметричного узора или их комбинации. Филлотактический спиральный узор может иметь парастихи по часовой стрелке и против часовой стрелки в соответствии с настоящим изобретением. Фиг. 12 заявки США № 15/942,513 изображает примерное схематизированное представление создания асимметричного управляемого распределения алгоритмического узора матрицы на глазу со спиральным филлотаксисом, в котором последовательно появляется каждая матрица микропор.
[00341] В некоторых вариантах осуществления узор матрицы микропор может быть каким-то одним из архимедовой спирали, спирали Корню, параболической спирали, гиперболической спирали, спирали жезл, логарифмической спирали, спирали Фибоначчи, золотой спирали или их комбинаций.
[00342] В некоторых вариантах осуществления, описанные системы, способы и устройства по настоящему изобретению могут включать в себя создание 3D модели микропорации на сферической поверхности.
[00343] В некоторых вариантах осуществления, описанные системы, способы и устройства по настоящему изобретению могут включать в себя использование параметров Фибоначчи и математических параметров для оптимизации выполнения, результатов и безопасности хирургического вмешательства в матрице лечебного воздействия путем лазерной микропорации, имеющей узор пор, например, микропор или нанопор, в котором узор является картиной неравномерного распределения, которая реализуется в разнопрофильной ткани в соответствии с существующей иерархией тканей на макроуровне и микроуровне таким образом, что лечение дает конгруэнтный эффект омоложения. Матрица или сетка лечебного воздействия, содержащая множество микропор/нанопор/абляций/разрезов/мишеней, может располагаться в виде узора с неравномерным распределением, при этом узор является спиральным или филлотактическим. Узоры могут быть описаны уравнением Фогеля. Кроме того, имеется множество других геометрий/плотностей/глубин и форм, имеющих спиральные или филлотактические узоры путей протока, например, в форме открытых каналов или пор. Микропоры/нанопоры могут быть специально выполнены так, чтобы соответствовать любой заданной контактной линзе, маске или материалу или конструкции другой модели, имеющей узор с неравномерным распределением. В качестве альтернативы, микропорацию можно использовать в связи с обычными перфорированными полимерами с покрытием или без покрытия, например, гидрофильного или гидрофобного типов. Матричную структуру, имеющую узор с неравномерным распределением микропор, и линзу или маску можно использовать совместно в виде системы терапии.
[00344] Фигуры от Фиг.4A-1 до 4A-10 и 26-3A заявки США № 15/942,513 показывают, каким образом можно применять микропорацию/нанопорацию для удаления поверхностной, подповерхностной и промежуточной ткани и воздействия на поверхностные, внутритканевые, биомеханические характеристики (например, планарность, поверхностную пористость, геометрию ткани, вязкоэластичность ткани и другие биомеханические и биореологические характеристики) аблируемой целевой поверхности или целевой ткани. Кроме того, настоящее изобретение может включать в себя разнотипные автоматизированные системы обработки данных для обработки данных выполнения микропораций в различных составах и конфигурациях.
[00345] Характеристики ткани, подвергаемой воздействию, включают в себя, наряду с прочим, пористость, текстуру, вязкоэластичность, коэффициент пустотности, высоту микронеровностей поверхности и однородность. Характеристики поверхности, например, высоту микронеровностей поверхности и отражательную способность, измеряют для определения состояния. Такая микропорация может также оказывать влияние на деформацию, податливость и гибкость ткани и имеет текстуру типа «апельсиновой корки. Следовательно, свойства ткани, подвергнутой микропорации/нанопорации, будут обычно влиять на и/или повышать состояние ткани путем восстановления или омоложения биомеханической податливости ткани в спокойном состоянии и при напряжении/деформации, а также проницаемости ткани.
[00346] В некоторых вариантах осуществления, микропорация может включать в себя множество трасс микропор, расположенных в виде узора. Узор из трасс микропор может содержать правильные круги или многоугольники, неправильные круги или многоугольники, эллипсоиды, дуги, спирали, филлотактические узоры или их комбинации. Узор из трасс микропор может содержать радиальные дуговидно-изогнутые трассы, радиальные спиральные трассы, или их комбинации. Узор из трасс микропор может содержать комбинацию из внутренних радиальных спиральных трасс и внешних радиальных спиральных трасс. Узор из трасс воздушных протоков может содержать комбинацию из радиальных спиральных трасс по часовой стрелке и радиальных спиральных трасс против часовой стрелки. Трассы микропор могут быть отделенными, или разрывными друг от друга. В качестве альтернативы, одна или более трасс микропор могут соединяться по текучей среде. Число радиальных дуговидно-изогнутых трасс («дуг»), радиальных спиральных трасс или их комбинаций может изменяться.
[00347] В некоторых вариантах осуществления, микропорация может содержать узор, который является узором с управляемым нелинейным распределением, узором с управляемым линейным распределением или случайным узором. В некоторых вариантах осуществления, глазная контактная линза/глазная маска может содержать узор из трасс микропор, при этом узор трасс микропор построен из координат x и y узора с управляемым неравномерным распределением. Узор с управляемым неравномерным распределением, использованный для создания трассы микропор в глазной контактной линзе/глазной маске, может быть таким же, как или иной, чем матричная структура алгоритма лазерной микропорации, используемого с глазной контактной линзой/глазной маской. В варианте осуществления, узор с управляемым неравномерным распределением является таким же, как матричная структура алгоритма лазерной микропорации, используемого с глазной контактной линзой/глазной маской. В некоторых вариантах осуществления, узор с управляемым неравномерным распределением отличается от матричной структуры используемого алгоритма лазерной микропорации.
[00348] В некоторых вариантах осуществления, система лазерной микропорации может иметь филлотактические узоры в соответствии с вариантами осуществления алгоритмов лазерной микропорации, описанных в настоящей заявке. Глазная контактная линза/глазная маска работают скоординировано с системой лазерной микропорации, создающей филлотактические узоры, когда система лазерной микропорации образует множество микропор, множество отверстий, множество полостей, множество каналов, множество проходов или их комбинаций, которые формируются в виде узора, предназначенного для содействия улучшению естественных таких биологических функций, как ток жидкости, кровоток, движение мышц, а также статической и динамической биологические функции, при участии глазной контактной линзы/глазной маски и ткани, имеющих филлотактический узор. Микропоры, отверстия, полости, каналы, проходы или их комбинации могут образовать трассы биологических протоков, которые располагаются вдоль, внутри или через несущую мягкую накладку или в комбинации. В одном варианте осуществления, узор из микропоры, отверстий, полостей, каналов, проходов или их комбинаций может иметь форму правильных кругов или многоугольников, неправильных кругов или многоугольников, эллипсоидов, дуг, спиралей, филлотактических узоров или их комбинаций. В другом варианте осуществления, трассы воздушных протоков могут иметь форму правильных кругов или многоугольников, неправильных кругов или многоугольников, эллипсоидов, дуг, спиралей, филлотактических узоров или их комбинаций.
[00349] В некоторых вариантах осуществления, подходящий спиральный или филлотактический узор можно создать по координатам x и y любой филлотактической матрицы вышеописанных вариантов осуществления системы микропорации. В варианте осуществления, координаты x и y спирального или филлотактического узора переносятся и поворачиваются для определения координат x′ и y′ спирального или филлотактического узора вспомогательных воздушных протоков, где Ɵ равен π/n в радианах, и n равно любому целому числу. Координаты (x′ и y′) можно откладывать, например, с помощью программного обеспечения для компьютерного построения чертежей (CAD), чтобы сформировать подходящий узор, например, спиральный или филлотактический узор.
[00350] Затем узоры(паттерны) можно использовать для задания радиальных дуговидно-изогнутых и спиральных каналов, а также кольцевых каналов, которые могут пересекать дуговидно-изогнутые и спиральные каналы, или их комбинации. Кольцевые, дуговидно-изогнутые, спиральные или комбинированные каналы могут вызывать деформацию формы, например, в виде формирующихся канавок, полостей, отверстий, проходов или других путей. Примерные варианты осуществления узоров канавок, которые базируются на перенесенных филлотактических узорах, показаны также на фиг. 10, 13 и 16 в заявке США 15/942,513. Дополнительные примерные варианты осуществления, базирующиеся на перенесенных филлотактических узорах показаны на фиг. 14A-14D, 15A-15F и 41 в заявке США 15/942,513.
[00351] Как показано ниже, узор микропорации может иметь некоторое число спиралей по часовой стрелке и некоторое число спиралей против часовой стрелки, при этом число спиралей по часовой стрелке и число спиралей против часовой стрелки являются числами Фибоначчи или кратным числам Фибоначчи.
[00352] Фиг. 14A в заявке США 15/942,513 изображает примерный вариант осуществления узора микропорации, который можно реализовать непосредственно на целевой ткани или, в качестве альтернативы, на контактной линзе, маске или другой подобной модели, имеющей узор микропор с управляемым неравномерным распределением микропор в распределении ряда Фибоначчи, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00353] Фиг. 14B в заявке США 15/942,513 является примерной иллюстрацией филлотактического спирального узора, содержащего парастихи по часовой стрелке и против часовой стрелки, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00354] Фиг. 14C в заявке США 15/942,513 является другой примерной иллюстрацией филлотактического спирального узора, содержащего парастихи по часовой стрелке и против часовой стрелки, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00355] Фиг. 14D-15F в заявке США 15/942,513 являются примерными иллюстрациями модели Фогеля, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00356] Фиг. 16A-16N в заявке США 15/942,513 являются примерными иллюстрациями примерных вариантов осуществления микропораций, полученных из икосаэдрических форм узоров, в соответствии с некоторыми вариантами осуществления настоящего изобретения
[00357] Фиг. 17A-17B и 2K-18, и 2K-19 в заявке США 15/942,513 изображают примерные узоры микропораций, полученные из икосаэдрических форм узоров, представляющих фрактальные сферические и икосаэдрические/тетраэдрические мозаики, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00358] Площадь поверхности: Суммарная площадь поверхности целевой ткани влияет на количество суммарно удаляемого материала ткани. Обычно, когда величина суммарной площади поверхности ткани увеличивается, количество удаляемого поверхностного материала увеличивается. В некоторых вариантах осуществления, суммарная площадь поверхности микропораций целевой ткани может быть равной общей потенциальной поверхности системы микропораций (т.е. целевой зоне микропорации, если в ней не было микропор), за вычетом суммарной площади микропор (т.е. суммы площадей всех микропор). Таким образом, величина суммарной площади поверхности микропораций может быть в диапазоне от 1% до приблизительно 99,5% от общей потенциальной площади поверхности, в зависимости от искомой площади микропор. Смотри фиг. 30 в заявке США 15/942,513 для примерных площадей поверхности, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[00359] Глубина: фигуры от Фиг. 4A-5 до 4A-10 в заявке США 15/942,513 показывают, что общая глубина целевой ткани может влиять на количество суммарно удаляемого материала ткани. Обычно, когда величина общей глубины ткани увеличивается, количество удаляемой промежуточной или подповерхностной ткани увеличивается. В некоторых вариантах осуществления, глубина удаляемой микропорации ткани эквивалентна общей потенциальной подповерхностной и промежуточной ткани системы микропораций (т.е. общей промежуточной и подповерхностной ткани, если в ней не было микропор), за вычетом суммарного объема микропор (т.е. суммы площадей всех микропор). Таким образом, величина суммарного объема микропорации может быть в диапазоне от 1% до приблизительно 95% от суммарного потенциального подповерхностного и промежуточного объема ткани микропораций, в зависимости от величины искомого объема микропор.
[00360] Плотность пор: Плотность матрицы пор, например, множества микропор, может влиять на суммарную величину площади микропор и суммарную величину удаляемого поверхностного, подповерхностного и промежуточного объема. Влияние могут также оказывать суммарное число микропор и распределение микропор. Множество примерных конфигураций плотностей, размера микропоры и распределения микропор показано на фигурах от фиг. 2K-1-A до 2K-1-C и до фиг. 2K-17 в заявке США 15/942,513. Следует отметить, что микропоры могут создаваться в случайном порядке, равномерно или по-отдельности. Пространственная плотность или объемная плотность множества микропор также может влиять на биомеханические свойства.
[00361] Число пор: Число пор, например, микропор, может влиять на суммарную величину площади микропор и величину суммарного удаляемого поверхностного, подповерхностного и промежуточного объема. Кроме того, число микропор может влиять на плотность и распределение покрытия микропорами на поверхности микропорации, что, в свою очередь, может непосредственно влиять на суммарную объемную долю пор микропорации. В некоторых вариантах осуществления, число микропор может быть, по меньшей мере, около 3, по меньшей мере, около 5, по меньшей мере, около 8, по меньшей мере, около 12 или, по меньшей мере, около 15. В некоторых других вариантах осуществления, число микропор может быть, по меньшей мере, около 45, по меньшей мере, около 96, по меньшей мере, около 151 или, по меньшей мере, около 257. Дополнительные примерные параметры представлены также на фиг. 31-34B, 37, 38 и 39 в заявке США 15/942,513.
[00362] В некоторых вариантах осуществления, число пор может составлять 9-10000 в соответствии с размером пятна, который может изменяться в диапазоне от 1 нм до 600 мкм. Число микропор может находиться в диапазоне, содержащем любую пару вышеупомянутых верхнего и нижнего пределов.
[00363] На микропорацию по настоящему изобретению могут влиять различные параметры и факторы, которые представлены на фиг. 31-35 в заявке США 15/942,513 и рассматриваются также далее.
[00364] Угол отклонения(дивергенции): При подведении лазерного импульса к целевой ткани, увеличение или уменьшение угла отклонения α может влиять на то, как микропоры размещаются внутри узора, и на форму спиралей по часовой стрелке и против часовой стрелки. Угол отклонения равен частному от деления 360° на постоянную или переменное значение, и поэтому угол отклонения может иметь постоянное значение или может изменяться. В некоторых вариантах осуществления, узор может иметь угол отклонения в полярных координатах, который изменяется в пределах от приблизительно 100° до приблизительно 170°. Небольшие изменения угла отклонения могут значительно изменять матричную структуру и могут показывать филлотактические узоры, которые отличаются только по значению угла отклонения. Примерный угол отклонения может быть равен 137,3°. Угол отклонения может быть также равен 137,5° или 137,6°. В некоторых вариантах осуществления, угол отклонения составляет, по меньшей мере, приблизительно 30°, по меньшей мере, приблизительно 45°, по меньшей мере, приблизительно 60°; по меньшей мере, приблизительно 90° или, по меньшей мере, приблизительно 120°. Других вариантах осуществления, угол отклонения меньше 180°, например, не превышает приблизительно 150°. Угол отклонения может быть в пределах диапазона, содержащего любую пару вышеупомянутых верхнего и нижнего пределов. В некоторых других вариантах осуществления, угол отклонения изменяется в пределах от приблизительно 90° до приблизительно 179°, от 120° до приблизительно 150°, от приблизительно 130° до приблизительно 140°, или от приблизительно 135° до приблизительно 139°. В некоторых вариантах осуществления, угол отклонения определяется делением 360° на иррациональное число. В некоторых вариантах осуществления, угол отклонения определяется делением 360° на золотое отношение. В некоторых вариантах осуществления угол отклонения находится в диапазоне от приблизительно 137° до приблизительно 138°, например от приблизительно 137,5° до приблизительно 137,6°, например, от приблизительно 137,50° до приблизительно 137,51°. В некоторых вариантах осуществления, угол отклонения равен 137,508°.
[00365] Расстояние до края матрицы микропорации: В некоторых вариантах осуществления, габаритные размеры матричной структуры могут определяться на основании геометрии микропорации и предполагаемого использования. Расстояние от центра узора до самых крайних микропор может простираться до расстояния, граничащего с краем микропорации. Таким образом, края самых крайних микропор могут продолжаться до или пересекаться с краем микропорации. В качестве альтернативы, расстояние от центра узора до самых крайних микропор может простираться до расстояния, которое допускает, чтобы некоторый участок пространства между краями самых крайних микропор и краем микропорации не содержал микропор. Минимальное расстояние от краев самых крайних микропор можно задавать по требованию. В некоторых вариантах осуществления, минимальное расстояние от краев самых крайних микропор до внешнего края микропорации является заданным расстоянием, идентифицируемым как скрытая длина или как процент длины передней поверхности микропорации, на основании которой возникает матричная структура. Микропоры могут быть разнесены широко или узко или размещены мозаично.
[00366] Размер пор: В некоторых вариантах осуществления, размер пор, например, микропор, может определяться, по меньшей мере, частично, искомой суммарной величиной площади матрицы для микропорации. Размер микропор может быть постоянным по всему узору или может изменяться в пределах узора. В некоторых вариантах осуществления, размер микропор является постоянным. В некоторых вариантах осуществления, размер микропор изменяется вместе с расстоянием микропор от центра узора. Существует множество размеров, допустимых в системе. Размер пор может изменяться от 1 нм до 600 мкм. В некоторых других вариантах осуществления, размер 50 мкм, 100 мкм 125 мкм, 200 мкм, 250 мкм, 325 мкм, 425 мкм или 600 мкм.
[00367] Форма пор: Существует множество пор, допустимых в системе. Форма пор, например, микропор, создаваемых в соединительной ткани электромагнитным излучением, может соответственно влиять на реакцию ткани и заживление ран. Квадратные формы могут заживать медленнее, чем круглые формы. Система микропорации способна создавать множество индивидуальных геометрических форм микропор. В некоторых вариантах осуществления, идеальная форма является квадратной.
[00368] Форма может также давать эффективный результат в виде множества микропор. Величина покрытия может зависеть от формы микропор. Форма микропор может быть правильной или неправильной. В некоторых вариантах осуществления форма микропор может иметь форму щелей, правильных кругов или многоугольников, неправильных кругов или многоугольников, эллипсоидов, кругов, дуг, спиралей, каналов, другие подходящие формы или их комбинации. В некоторых вариантах осуществления множество микропор имеет форму кругов. В некоторых вариантах осуществления форма матрицы может иметь форму одного или более геометрических узоров, например, икосаэдрических или тетраэдрических мозаик, при этом многочисленные круги или многоугольники (или другие формы) пересекаются. Форма может также влиять не желательное или нежелательное заживление ран и может быть изменена в зависимости от назначения функции микропоры.
[00369] Фиг. 16A-N в заявке США 15/942,513 представляют примеры множества микропор с такими порами. Множество микропор сконфигурировано таким образом, что узоры напоминают круги или многоугольники, которые могут иметь немного дуговидные края. Удаление ткани в таких конфигурациях влияет на биомеханические свойства математически и геометрически сбалансированным образом, с созданием стабильности в микропорации.
[00370] Параметр проектирования: Параметр проектирования может влиять на общее размещение матрицы или сетки микропорации в 3D ткани и относительно краев микропорации, принимая во внимание «атмосферу» внутри ткани. Схема микропорации можно корректировать в зависимости от природной формы самой ткани или на основании намечаемой физиологический анатомии или требуемого влияния. Это могут быть автодуальные (бесконечные) правильные евклидовы соты, двойственный многранник, 7 куб, 7 ортоплекс или, аналогично, простая сетка, решетка Браве, или сетка, не являющаяся решеткой Браве.
[00371] Коэффициент масштабирования: Коэффициент масштабирования может влиять на общий размер и размеры узора из множества микропор. Коэффициент масштабирования можно корректировать так, чтобы края самых крайних микропор находились в границах требуемого расстояния внешнего края микропорации. Кроме того, коэффициент масштабирования можно корректировать так, чтобы внутренние края самых внутренних микропор находились в границах требуемого расстояния внутреннего края микропорации. Принцип двойственности можно обобщить на n-мерное пространство и двойственные многогранники; в двух измерениях данные фигуры называются двойственными кругами или политопами, или три измерения или множество измерений, содержащих вершины, матрицы, или аналогичным образом содержащих изотропные и/или анизотропные мозаики.
[00372] Расстояние между ближайшими соседними порами: Вместе с анализом фактора числа и размера пор, например, микропор можно определять расстояние между центрами ближайших соседних микропор. Расстояние между центрами любыми двумя микропорами может зависеть от факторов схемы матрицы. В некоторых вариантах осуществления кратчайшее расстояние между центрами любых двух микропор никогда не повторяется (т.е. промежуток между порами никогда не является одинаковым точным расстоянием). Данный тип промежутка является также примером управляемой асимметрии. В некоторых других вариантах осуществления кратчайшее расстояние между центрами любых двух микропор всегда повторяется (т.е. промежуток между порами всегда является одинаковым точным расстоянием). Данный тип является также примером управляемой симметрии. В некоторых вариантах осуществления расстояние между двумя микропорами являются случайно распланированным (т.е. промежуток между порами является случайным). Таким образом, система может обеспечивать управляемую асимметрию, которая является, по меньшей мере, частичной вращательной асимметрией относительно центра схемы или узора матрицы, случайную асимметрию, которая является, по меньшей мере, частичной вращательной случайной асимметрией относительно центра схемы или узора матрицы, и управляемой симметрию, которая является, по меньшей мере, частичной вращательной симметрией относительно центра схемы или узора матрицы, и случайную симметрию, которая является, по меньшей мере, частичной вращательной случайной симметрией относительно центра схемы или узора матрицы.
[00373] В некоторых вариантах осуществления вращательная асимметрия может распространяться на, по меньшей мере, 51% микропор схемы матрицы. В некоторых вариантах осуществления вращательная асимметрия может распространяться на, по меньшей мере, 20 микропор схемы матричной структуры. В некоторых вариантах осуществления вращательная симметрия может распространяться на, по меньшей мере, 51% микропор схемы матрицы. В некоторых вариантах осуществления вращательная симметрия может распространяться на, по меньшей мере, 20 микропор схемы матрицы. В некоторых вариантах осуществления вращательный случайный узор может распространяться на, по меньшей мере, 51% микропор схемы матрицы. В некоторых вариантах осуществления вращательный случайный узор может распространяться на, по меньшей мере, 20 микропор схемы матрицы.
[00374] В некоторых вариантах осуществления, 51% рисунка(паттерна) из отверстий можно описать в полярных координатах уравнением модели Фогеля: φ=n×α, r=c√n, как описано выше.
[00375] Согласованная глазная контактная линза/глазная маска
[00376] Согласованная глазная контактная линза/глазная маска (смотри, например, фиг. 27A, элемент 2700, и фиг. 40 в заявке США 15/942,513) может быть гибкой или жесткой, мягкой или твердой. Она может быть изготовлена из любого числа различных материалов, включая материалы, обычно применяемые в контактных линзах или глазных масках, например, как гидрофильные, так и гидрофобные полимеры или мягкий гель, или коллаген, или растворимые материалы, или специальные металлы. Примерная гибкая линза/маска может включать в себя податливый гидрофильный («водолюбивый») пластик.
[00377] В некоторых вариантах осуществления описанные системы, способы и устройства по настоящему изобретению могут включать в себя способ и устройство для лечения склеры и соседних глазных структур и фракционной микропорации и восстановления поверхности, лазерной микропорации глаза для омоложения или восстановления физиологической функции глаза и/или облегчения дисфункции или заболевания. В различных вариантах осуществления матрицы могут иметь множество геометрий, плотностей, конфигураций, распределений, а также размеров и глубин пятна. Их можно также предварительно планировать и выполнять в различные моменты времени. Матрица может также проникать сквозь эписклеру, собственное вещество склеры или темную пластинку склеры на любую процентную часть требуемой порации. Значения подводимой электромагнитной энергии также могут быть подходящими.
[00378] Гидрофобная склеральная линза, индивидуально адаптируемая по толщине в нанометрах, мкм и т.п.: В различных вариантах осуществления индивидуально адаптируемая гидрофобная склеральная линза может иметь различные размеры, измеряемые, в общем, в миллиметрах, микрометрах или нанометрах. В общем, данная склеральная контактная линза может быть такой, которая может заключать в себе компьютерно-созданный специальный алгоритм для лазерного лечебного воздействия на склеру пациента. Во-первых, можно совмещать пятна, которые являются повторно обрабатываемыми, и пятна могут быть выполнены по заданной форме через маску или линзу. Маска может быть изготовлена из различных материалов, включая один или более гидрофобных полимеров или смесь полимеров, которые являются непроницаемыми для лазера. Это может обеспечивать дополнительный уровень защиты для окружающей ткани, на которую не планируется воздействовать, в дополнение к интеллектуальной технике составления схем. Центральная роговичная контактная линза может быть затененной для защиты роговицы от подсветки микроскопа и от самого лазерного пучка. В различных вариантах осуществления упомянутая линза может быть одноразовой, а не многократно используемой, когда на глазу находится узор. Кроме того, упомянутая линза может поставляться предварительно упакованной в стерилизованные контейнеры.
[00379] Упомянутая линза может быть создана путем измерения биометрии, морфологии, анатомии, топографии, кератотомии, толщины склеры, свойств, рефракции, светорассеяния материалов и других признаков и характеристик, которые можно импортировать, загружать или иначе вводить в модель трехмерного (3D) динамического конечно-элементного моделирования (FEM), который может быть платформой для «виртуального глаза». Система по изобретению может обрабатывать информацию как о роговице, так и линзе может выполнять множество алгоритмических тестов после того, как введены оптическая схема и вся информация. Система может применять математические и физические сценарии, имеющие целью повысить аккомодационную оптическую силу путем манипуляций со склерой, и может также придать роговице искомый профиль по полиномам Цернике, который будет создавать максимальную аккомодационную оптическую силу в случае, когда планируются лазерная коррекция зрения (LVC) и аккомодация. После завершения, узор может быть создан, например, с помощью ISIS (программного обеспечения визуализации и картирования глаза для анализа и воспроизведения картирования в видимом спектре рефракционного состояния глаза, рефракционного состояния роговицы, например, как рефракционного состояния линзы, так и рефракционного состояния роговицы, или «двойной оптики») путем использования виртуального глаза, и выполняется визуализация упомянутого узора. В некоторых вариантах осуществления, ISIS может быть сервомеханизмом.
[00380] Пластина может также содержать отмеченные координаты меридианов, направленных на 12 и 6 часов, для ориентации врачом на глазу. Пластина может также содержать отмеченную особую и отличающуюся координату меридианов 10/2/4/7 для ориентации квадрантов лечебного воздействия для врача. Пластина/контактная линза может быть изготовлена соответствующим 3D принтером, который связан с системной платой ISIS. После завершения, линзу можно стерилизовать перед постановкой на глаза пациента.
[00381] В ходе некоторых примерных этапов действий, сначала можно калибровать или включить лазер, который может быть связан с датчиком движения глаза или содержать его в некоторых вариантах осуществления, и линза устанавливается врачом. Пластина может действовать как маска и одновременно направлять лазерный пучок.
[00382] Конструкция линзы называется «полусклеральной контактной» (SEQ). Данная линза имеет, в качестве начальной позиции, несущий край склеры, на 2,0-мм части склеры, и состоит из трех кривых. Линза SEQ характеризуется 10 фенестрациями, которые предотвращают залипание линзы. Неровные поверхности роговицы можно скорректировать с использованием жестких газопроницаемых (RGP) контактных линз, роговичных линз с диаметрами в диапазоне от 8,0 мм до 12,0 мм. Склеральные линзы могут иметь диаметры, изменяющиеся в диапазоне от 22,0 мм до 25,0 мм.
[00383] Для построения и окончательной подгонки линзы можно применять формулы для расчета и производства линзы. Для сужения всего ряда можно начать с пробного набора для подбора по сагиттальному размеру от 2,70 мм по 4,10 мм. Различия в пробном наборе являются такими же как в пробном наборе для линз RGP с нормальным шагом 0,05 мм между разными радиусами.
[00384] Набор для подбора линз SEQ заканчивается разностью по сагиттальной высоте 0,1 мм. Независимо от значения кислородной проницаемости (DK), равной 90, и 10 фенестрациям линзы SEQ, может сохраняться проблема снабжения кислородом. Подобранные линзы с диаметрами больше, чем 12,0 мм, имеют больше опоры, так что линза является неподвижной, и поэтому не может происходить слезо-обмена.
[00385] В ходе некоторых примерных этапов действий, 1) когда лазер содержит датчик движения глаза, линза устанавливается врачом. Пластина действует как маска и одновременно направляет лазерный пучок. 2) Данная система с направляющей пластиной является специфической для лазера; узор помещается на глаз и через саму линзу, которая перфорируется в процессе, создающем план-карту приема процедуры и совмещающем все пятна от сканера до и после лечебного воздействия. 3) ISIS сохраняет данную информацию для глаза данного конкретного пациента, 4) В случае, когда требуется повторить лечение, вся информация (топографическая и т.п.) импортируется обратно в профиль пациента, чтобы ISIS пересчитало и переконфигурировало «с начала и до конца» существующие пятна для дальнейшего максимального улучшения результатов. 5) ISIS рассчитывает оптическую силу в центральной зоне (COP) до и прогнозируемую COP после моделирования, что может информировать пациента и хирурга относительно величины возможной COP для любого конретного пациента с и без дополнительной LVC. 6) ISIS демонстрирует также, с использованием виртуального глаза, полученного посредством FEM, биомеханические функции, оптические функции, а также численное моделирование зрения на всех расстояниях. 7) ISIS демонстрирует также послеоперационные COP, оптическую ось глаза (AA), значения рефракций, изменения профиля Цернике и т.п., и, в итоге, продолжает собирать всю информацию базы данных, чтобы создавать перспективные, более сложные и оптимизирующие алгоритмы. 8) ISIS может также профилировать различные алгоритмы, чтобы способствовать пониманию двойной оптической системы и предлагать изменяющиеся сценарии, исходя из изменения толщины склеры и другой биометрии, геометрии, оптической системы и т.п. с возрастом. Польза от этого очень велика, но конкретный вариант осуществления заключается в том, что ISIS может формировать возрастную план-карту лечения на основании первоначального обследования пациента по возрасту катаракты. Поэтому ISIS может заранее прогнозировать, сколько пятен, и какой узор следует использовать, и поэтому потенциальные зоны повторного лечения будут «предварительно определяться» ISIS, исходя из первой пластины. Это означает, что, при последующих посещениях, ISIS может предупреждать врача, когда происходит критическое снижение COP, и повторное лечение можно начинать в любое время (это будет определяться врачом, пациентом и результатами ISIS). 9) ISIS может также обеспечивать звуковое взаимодействие и может предупреждать врача во время лечения, если возникает потребность вмешательства, когда оно завершается, и направлять врача к таким данным обследования, которые следует оценить на предмет точности или уделения им большего внимания. ISIS может давать врачу рекомендации, но врач руководит выбором программ, которые будет выполнять ISIS. 10) ISIS содержит также список справочной литературы и может осуществлять поиск статей, знаний, а также последний тенденций. 11) ISIS может действовать как интеллектуальный голосовой помощник, например, Apple Siri.
[00386] Особенности конструкции лазера для некоторых вариантов осуществления могут включать в себя, Er:YAG-лазер с длиной волны 2,94 мкм на базе активного материала Er:YAG для офтальмологических лазеров; с длительность. импульса около 250 мкс; частота повторения импульсов может быть 3, 10, 15, 20, 25, 30, 40, 50 импульсов/с.
[00387] Большое значение могут иметь различные кривые общего поглощения различных тканевых компонентов. При длине волны 2,94 мкм, лазер может иметь в ближнем инфракрасном спектре ближайшую длину волны к 3,00 мкм, длине волны максимального поглощения H2O. Это позволяет лазеру эффективно испарять H2O из ткани (абляционный механизм), при незначительном тепловом эффекте. Взаимодействие лазерный пучок-ткань при 2,94 мкм: 2,94 мкм может быть очень важной длиной волны для абляции ткани; в 10-20 раз сильнее поглощаемой водой, чем CO2 при 10,6 мкм; в 3 раза сильнее поглощаемой водой, чем активной средой Er:YSGG при 2,79 мкм; порог абляции для воды при 2,94 мкм составляет около 1 Дж/см2. Абляция происходит мгновенно и может быть только поверхностным эффектом. Это обеспечивает очень точную абляцию, при малом сопутствующем повреждении ткани.
[00388] Применения офтальмологической системы на базе Er:YAG могут включать в себя расширенное разрешение 510K для эксцизии, разреза, испарения глазной мягкой ткани, и поэтому расширение применения является предопределенным, после того, как система одобрена, в том числе: в хирургии птеригиума; хирургическом лечении глаукомы; при ущемление диска зрительного нерва (задний отдел склеры); внутриглазной капсулотомии; хирургии внеглазных мягких тканей; при возрастной дегенерации макулы (AMD); и в других аспектах.
[00389] Предусмотрены также способы и устройства для лечения склеры и соседних глазных структур и фракционной микропорации и восстановления поверхности.
[00390] В настоящей заявке предлагаются система и способ для выполнения фракционного восстановления поверхности целевой зоны глаза, например, склеры, с использованием электромагнитного излучения. Электромагнитное излучение генерируется источником электромагнитного излучения. Электромагнитное излучение направляется на конкретный участок целевой зоны глаза, предпочтительно склеры. Электромагнитное излучение может блокироваться от воздействия на другой участок целевой зоны глаза маской или склеральной линзой. В качестве альтернативы, электромагнитное излучение может подводиться к другим участкам целевой зоны склеры, кроме конкретного участка.
[00391] В настоящей заявке дополнительно описан способ модификации ткани с использованием квазинепрерывного лазерного пучка, который предназначен для изменения оптических свойств глаза и содержит управляемую настройку объемной плотности мощности пучка и назначение требуемой длины волны пучка. Модификация ткани может достигаться фокусировкой пучка на предварительно выбранную начальную точку в ткани и перемещением фокальной точки пучка предварительно заданным образом относительно начальной точки по заданному объему ткани или вдоль заданной трассы в ткани. В зависимости от назначенной объемной плотности мощности, ткань, на которую направляется фокальная точка, может модифицироваться либо фотоабляцией, либо путем изменения вязкоупругих свойств ткани.
[00392] Офтальмологическая лазерная система
[00393] В различных вариантах осуществления офтальмологическая лазерная система по настоящему изобретению может включать в себя систему доставки лазерного пучка и датчик движения глаза, реагирующий на перемещение глаза и работающий совместно системой доставки лазерного пучка, для абляции склерального материала глаза в переднем и/или заднем отделах посредством наведения импульса лазерного пучка на выбранную зону склеры глаза. Импульсы возбуждаются в такой последовательности и с таким узором, чтобы никакие лазерные импульсы не попадали в следующие друг за другом места и никакие следующие друг за другом импульсы не совмещались. Узор(паттерн) перемещается в ответ на перемещение глаза. Поскольку склера глаза находится «вне оси», то механизм сканирования является новым в том, что он работает не посредством фиксации пучка на зрительной оси глаза. Как показано на фиг. 20 и фиг. 20A-20D в заявке США 15/942,513, наоборот, механизм «внеосевого» сканирования может включать в себя систему сопряжения с глазом, использующую гониометрическое зеркало или систему наведения для абляции противолежащих квадрантов склеры вне зрительной оси. Замкнутая система обратной связи размещается в самом сканере, а также между системой сопряжения с глазом и сканером, в форме магнитного сенсорного механизма, который привязывает лазерную головку к системе сопряжения с глазом и, при посредстве позиционирования глаза с помощью биологической обратной связи, включает как отслеживание движения глаза, так и доставку пучка.
[00394] В некоторых вариантах осуществления лазерная система может включать в себя средство для выбора и регулирования формы и размера зоны, облучаемой каждым импульсом лазерной энергии, без изменения плотности энергии пучка. Посредством изменения размера облучаемой зоны между импульсами, некоторые области поверхности можно эродировать больше, чем другие, и поэтому можно перепрофилировать поверхность. Способ и система пригодны, помимо прочего, для удаления язв роговицы и перепрофилирования роговицы с целью удаления аномалий рефракции, а также для перепрофилирования оптических элементов. В некоторых вариантах осуществления лазерный пучок может входить в оптическую систему, размещенную в манипуляторе шарнирной конструкции и заканчивающуюся в окуляре, имеющем присоску для прикрепления к глазу. Оптическая система может включать в себя устройство формирования пучка для коррекции любой асимметрии в сечении пучка, первую промежуточную телескопическую систему, систему управления размерами пучка и вторую промежуточную телескопическую систему. Система управления размерами пучка может содержать диафрагму, имеющую окно определенной формы или участок диафрагмы определенной формы и аксиально перемещаемую вдоль сходящегося или расходящегося участка пучка. Альтернативная система управления размерами пучка содержит диафрагму, имеющую окно определенной формы и расположенную между связанными системами с переменными фокусными расстояниями. Возможно также использование зеркал, регулируемых щелей и рефракционных систем. В некоторых вариантах осуществления лазер может быть предпочтительно Er:YAG-лазером. Система может включать в себя измерительное устройство для измерения профиля поверхности и систему управления с обратной связью для управления работой лазера в соответствии с измеренными и искомыми профилями.
[00395] В некоторых вариантах осуществления, способ, устройство и система для прецизионных лазерных вмешательств с управлением по модели, описанных в настоящей заявке, повышает точность, диапазон скоростей, надежность, эксплуатационную адаптируемость, безопасность и эффективность вмешательств, например, лазерной микрохирургии, особенно офтальмологической хирургии, включая возможность выполнения такой лазерной хирургии вне зрительной оси. Фиг. 19 в заявке США 15/942,513 представляет примерную схему инструмента и системы в соответствии с некоторыми вариантами осуществления настоящего изобретения, которые применимы к таким разделам медицины, где точность позиционирования лазерного лечебного воздействия является критической, в любом случае, когда желательно точное ограничение пространственной протяженности лазерного лечебного воздействия, и/или в любом случае, когда необходимо повлиять на точность операций на мишени или группе мишеней, подверженных перемещению во время процедуры. Следовательно, система может включать в себя следующие ключевые компоненты: 1) пользовательский интерфейс, состоящий из видеодисплея, микропроцессора и органов управления, интерфейса GUI (графического пользовательского интерфейса), 2) систему визуализации, которая может включать в себя хирургический видеомикроскоп с возможностью изменения масштаба, 3) автоматизированную 3D систему опознавания, определения местоположения и отслеживания мишени, которая может следить за перемещениями ткани субъекта, например, глаза, во время операции, что позволяет хирургу предварительно определять схему облучения на основании изображения, которое автоматически стабилизируется в течение длительного периода времени, 4) лазер, который можно фокусировать так, что затрагиваются только прецизионные лечебные воздействия, описанные пользовательским интерфейсом, 5) диагностическую систему, включающую в себя картирование и топографию, численные данные, математические данные, геометрические данные, данные визуализации, посредством измерения точной поверхности и 3D форм до, во время и после процедуры, при этом упомянутые измерения подлежат выполнению онлай в пределах отрезков времени, не ограниченных временами реакции человека, и могут выполняться в реальном времени, и 6) быстродействующее надежное средство защиты, посредством автоматического прерывания возбуждения лазера, если возникают любые условия, обосновывающие такое прерывание процедуры, например, опасение относительно безопасности.
[00396] Фиг. 20(E-G) в заявке США 15/942,513 дополнительно поясняет внеосевые характеристики лазерной системы, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано, бета(β) является зрительной осью во всех случаях, и альфа(α) является углом между зрительной осью и осью воздействия. Осью вращательной симметрии является вертикальная ось. Зоны лечения лазером предпочтительно не закрываются веками и другими чертами лица пациента. Ось фиксации глаза и ось лазерного пучка находятся под фиксированным углом одна относительно другой, чтобы создавать поры в заданных зонах лечения. Подводимый лазерный пучок можно поворачивать вокруг вертикальной оси β. В некоторых вариантах осуществления, главными особенностями может быть то, что: лазерный пучок и зона сканирования (например, зона OCT) находятся на одной осевой линии, и зона сканирования и фокусное расстояние согласуются с размером лазерного пятна и фокусным расстоянием. Видеокамера располагается немного в стороне от оси лазерного пучка. Точка фиксации глаза может находиться под предварительно установленным углом к доставляемому лазерному пучку, с поворотом на 180° вокруг оси β от доставляемого лазерного пучка.
[00397] Фиг. 20I в заявке США 15/942,513 представляет другой пример внеосевого сканирования, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано, лечебное воздействие может осуществляться под углом.
[00398] В некоторых вариантах осуществления, систему можно применять при диагностике и анализе в офтальмологии и поддержке глазной хирургии и может включать в себя средство 3D-7D-картирования для обнаружения местоположений, форм и признаков-ориентиров на и в глазу пациента в трех измерениях и для формирования данных и сигналов, представляющих такие местоположения, формы и признаки-ориентиры, средство отображения, принимающее сигналы из средства 3D-7D-картирования, для представления пользователю изображений, отображающих упомянутые местоположения, формы и признаки-ориентиры глаза в целевых местоположениях, включая средство управления отображением для предоставления пользователю возможности выбора целевого местоположения и отображения сечения участков глаза в реальном времени как во время абляция, так и после каждого лазерного импульса, средство анализа положения, связанное со средством трехмерного картирования и принимающее его сигналы, для распознавания возникновения изменений положения признаки-ориентиров глаза, средство слежения за мишенью, связанное со средством анализа положения, для поиска признака-ориентира целевой ткани и нахождения нового положения упомянутого признака-ориентира после такого изменения положения и для формирования сигнала, указывающего новое положение, и средство позиционирования по данным слежения для приема упомянутого сигнала из средства слежения за мишенью и для внесения изменения в нацеливание средства трехмерного картирования на новое положение упомянутого признака-ориентира целевой ткани, чтобы тем самым следовать за признаком-ориентиром и стабилизировать изображения на средстве отображения.
[00399] Средство отображения, описанное в различных вариантах осуществления настоящего изобретения может быть видеодисплеем и дополнительно включать в себя хирургический микроскоп или цифровой монитор, или средство на базе интеллектуального устройства, направленный(ое) на глаз пациента для получения в реальном времени микроскопических видеоизображений целевых зон ткани глаза и для ввода информации видеоизображений в средство отображения видеоизображений, чтобы обеспечивать отображение таких микроскопических видеоизображений и поддержку пользователю при диагностике и анализе, с возможностью отображения разных сечений ткани пациента, выбираемых пользователем в реальном времени.
[00400] Средство позиционирования по данным слежения может включать в себя поворотное зеркало с автоматическим управлением, роботизированным управлением, управлением с использованием технологии Bluetooth, и система может включать в себя компоновку линз объектива, связанную со средством картирования и содержащую конечную фокусирующую линзу, при этом поворотное зеркало располагается внутри компоновки линз объектива, с возможностью перемещения относительно конечной фокусирующей линзы, в одном варианте осуществления.
[00401] В некоторых вариантах осуществления, система может включать в себя источник лазерных импульсов для выработки лазерного пучка с длиной волны в диапазоне от инфракрасного до ближнего инфракрасного света и мощностью, допускающей выполнение глазной хирургической операции требуемого типа, средство управления возбуждением лазера для предоставления хирургу/пользователю возможности управления прицеливанием, глубиной и временем возбуждения лазера, чтобы выполнить требуемую хирургическую операцию, средство 3D-7D-картирования, направленное на глаз пациента, для получения данных, представляющих местоположение и формы признаков-ориентиров на и внутри глазу(а), микропроцессорное средство для приема данных из средства трехмерного картирования и для преобразования данных в формат, представимый на экране и пригодный для того, чтобы хирург/пользователь точно определял местоположение признаков-ориентиров глаза и место прицеливания и глубину лазерного пучка в пределах упомянутых признаков-ориентиров, и средство отображения для отображения сформированных микропроцессором изображений, представляющих хирургу/пользователю топографию глаза и место прицеливания и глубину лазерного пучка перед тем, как инициируется следующий лазерный импульс, во время подготовки к и в процессе операции, при этом средство управления отображением предоставляет хирургу/пользователю возможность выбора зон глаза для отображения, включая изображения сечений участков глаза.
[00402] Источник лазерной энергии инфракрасного и ближнего инфракрасного диапазона, работающий в режиме свободной генерации, или непрерывной генерации или с модуляцией добротности может генерировать лазерный пучок, допускающей выполнение требуемой лазерной хирургической операции в ткани пациента, в том числе внутри прозрачной ткани пациента. Система может включать в себя средство оптического тракта для приема лазерного пучка и перенаправления лазерного пучка и его фокусировки, при необходимости, на требуемую мишень в ткани, на которой должна выполняться операция.
[00403] Система может включать в себя корпус лазера, расположенный с возможностью ограждения и направления средства оптического тракта для получения изображений упомянутой мишени вдоль средства оптического тракта и для подачи информации видеоизображения в средство отображения видеоизображений, и для отслеживания перемещений ткани субъекта, на которую наводится система, без повреждения ткани субъекта до того, как инициируется следующий импульс лазера, и соответствующего сдвига оптического тракта до того, как инициируется следующий импульс лазера, таким образом, чтобы средством трехмерного картирования и средством хирургического микроскопа формировались информация и изображения, а также целевая установка и положение лазерного пучка, после изменений положения ткани. Каждый снятый кадр изображения и информация посылаются в видеодисплей после каждого импульса внутри 3D-7D микропоры до и после возбуждения импульса лазера в динамической форме изображения поверхности в реальном времени. Интерфейс GUI может включать в себя интегрированную систему одновременного просмотра 7 представлений для записанных изображений, включая: поверхность, внутреннюю пору, внешнюю пору, нижнюю часть микропоры, изображение всего глазного яблока, зону целевой матрицы.
[00404] В некоторых вариантах осуществления, предпочтительной проекцией для микропроцессора может быть 7-гиперкуб, но существуют другие примеры в объемной сферической форме, пространстве, которые можно встраивать в GUI и микропроцессор. Ортогональные проекции могут включать в себя примеры, показано на фиг. 8 заявки США № 15/942,513.
[00405] Система может включать в себя многомерное масштабирование, линейный дискриминантный анализ и обработку линейного сокращения размерности, а также локальное линейное вложение и изометрические карты (ISOMAP). Возможно также включение способов нелинейного сокращения размерности.
[00406] В некоторых вариантах осуществления, система может допускать 1D-, 2D-, 3D- или 4D-преобразование, вплоть до 7D-преобразования топологических изображений или волокнистого образования. Волокнистое образование является обобщением понятия пучок волокон. Пучок волокон точно определяет идею одного топологического пространства, называемого волокном, параметризуемого с помощью другого топологического пространства, называемого базой. Волокнистое образование подобно пучку волокон, за тем исключением, что волокна не обязательно должны быть ни одним и тем же пространством, ни гомеоморфными; точнее они являются гомотопически эквивалентными. Когда волокнистые образования эквивалентны техническим свойствам топологического пространства в 3-, 4-, 5-, 6- и 7-мерных сферических пространствах, то непрерывное отображение p:E→B удовлетворяет свойству поднятия гомотопии по отношению к любому пространству. Пучки волокон (по паракомпактным базам) составляют важные примеры. В теории гомотопии, любое отображение является «таким же точным, как» волокнистое образование, т.е. любая карта может быть разложена как гомотопическая эквивалентность в «пространстве траекторий отображения», которому следует волокнистое образование, в гомотопические слои.
[00407] Лазерная рабочая станция может быть оборудована тремя программируемыми осями (X, Y, Z; возможно распространение на 5 осей), содержит автоматический механизм поворотного стола, программируемый по осям X, Y, Z, и 2-позиционный поворотный стол. Станция может включать в себя человекомашинный интерфейс (ЧМИ) с уровнем защиты пользовательского доступа, диагностикой и протоколированием данных для валидированных процессов и удобство работы, а также программный модуль сортировки, адаптируемый для однозначно определяемой модуляции импульсов, при этом: диаметр пор: 0,1 мкм - 1000 мкм; максимальная глубина абляции: 0,1 мкм - 2000 мкм; допуск на размер поры: >±1-20 мкм.
[00408] Рабочие характеристики могут также включать в себя подключение компьютера к сети, работу с планшета iPad, управление с помощью джойстика, управление с помощью сенсорного экрана, работу с айфона, удаленное управление или с использованием технологии Bluetooth, работу с встроенной цифровой видеокамерой, работу с встроенными возможностями видео и так далее.
[00409] СИСТЕМА И СПОСОБЫ ДОСТАВКИ ГЛАЗНЫХ ЛЕКАРСТВ С ПРИМЕНЕНИЕМ ЛАЗЕРА
[00410] В некоторых вариантах осуществления, описанные системы, способы и устройства по настоящему изобретению можно использовать для доставки глазных лекарств с применением лазера, например, способы и устройства для фототерапевтического лечения, например, посредством абляции, коагуляции и/или фототерапевтической модуляции целевой ткани, например, склеральной ткани и других внутриглазных тканей, таких как сосудистая оболочка, субхороидальное пространство, нейроретина или другие ткани. В настоящей заявке раскрывается способ создания начальной поверхности (A) проникновения в биологической мембране (1), содержащий следующие этапы: a) создание множества отдельных микропор (2i) в биологической мембране (1), при этом каждая отдельная микропора (2i), имеет отдельную поверхность (Ai) проникновения; и b) создание такого числа отдельных микропор (2i) и с такими формами, что начальное пространство (A) проникновения, которое является суммой отдельных поверхностей (Ai) проникновения всех отдельных микропор (2i), имеет требуемое значение. Раскрывается также микропоратор, выполняющий способ. В данном случае, биологическая поверхность может быть глазом. В случае глаза: выполняется такое облучение зоны склеры, чтобы терапевтическое средство проходило сквозь вскрытую зону, созданную лазерным излучением и, тем самым, доставлялось во внутриглазные целевые ткани в передний или задний отделы глазного яблока, например, сосудистую оболочку, нейроретину, эпителий сетчатки, сосудистую оболочку, стекловидное тело или водянистую влагу.
[00411] заявка США 15/942,513, включенная в настоящую заявку, раскрывает дополнительные варианты осуществления систем, устройств и способов доставки лекарств, которые могут быть также применены в системе по настоящему изобретению и/или предназжначены для применения с ней.
[00412] В некоторых вариантах осуществления, описанные системы, способы и устройства по настоящему изобретению можно применять, но без ограничения, для доставки лекарств, питательных веществ, экстракта виноградных косточек, стволовых клеток, обогащенную белками плазму, фотоактивированные «умные» полимерные носители и матриксные металлопротеиназы. Фиг. 20P-1-20P-3 в заявке США 15/942,513 представляют, в некоторых вариантах осуществления, примерные мишени для лекарства для хороидного сплетения и доставку питательных веществ.
[00413] Система доставки лекарств может применять в предоперационном/ интраоперационном/ послеоперационном состоянии для доставки любого лекарства, необходимого при проведении множества операций на глазу для профилактического или послеоперационного применения.
[00414] В некоторых вариантах осуществления лазерная система может включать в себя установку сопряжения с глазом, изображенную, например, на фиг. 20, 20A-20B в заявке США 15/942,513. Установка сопряжения с глазом может располагаться над глазом во время медицинской операции. Установка сопряжения с глазом может обеспечивать вид четырех квадрантов.
[00415] В некоторых вариантах осуществления лазерная система может включать в себя предохранительное приспособление форсунки, изображенное на фиг. 21A-21B в заявке США 15/942,513. В ходе некоторых примерных действий, предохранительное приспособление форсунки может крепиться к форсунке.
[00416] В некоторых вариантах осуществления лазерная система может включать в себя рабочую станцию, изображенную на фиг. 21A-21B в заявке США 15/942,513. Рабочая станция может включать в себя способ, устройство и систему для вышеописанных прецизионных лазерных вмешательств с управлением по модели. Рабочая станция может включать в себя интерфейс GUI, шарнирно-сочлененную консоль, узел корпуса лазера, ПЗС-видеокамеру, сканер с гальванометрическими зеркалами, допускающий внеосевое сканирование, пилотный пучок, средство трехмерного картирования, по меньшей мере, один коммуникационно-связанный микропроцессор, источник питания и средство отображения, включая средство для представления изображений хирургу/пользователю, указывающее точное текущее местоположение лазерной цели и глубины на компьютерных изображениях, которые содержат, обычно, вид в плане и избранные сечения глаза, представляющие признаки-ориентиры глаза на разных глубинах, систему визуализации, соединенную со средством отображения видеоизображений, включая средство картирования в трех-семи измерениях для формирования, считывания и интерпретации данных, чтобы получать информацию, относящуюся к местоположению в семи измерениях значимых признаков-ориентиров ткани, на которой предполагается операция, и включая микропроцессорное средство для интерпретации данных и представления данных в средство отображения видеоизображений в формате, пригодном для хирурга/пользователя, и оборудована тремя программируемыми осями (X, Y, Z; возможно распространение на 5 осей), содержит автоматический механизм поворотного стола, программируемый по осям X, Y, Z, и 2-позиционный поворотный стол. Содержит человекомашинный интерфейс (ЧМИ) с защищенным пользовательским доступом. Дополнительные сведения о рабочей станции приведены в заявке США 15/942,513 и включены в настоящую заявку.
[00417] В некоторых вариантах осуществления механические или физические требования системы, описанные в настоящей заявке можно включить в «передвижную» рабочую станцию с блокируемыми колесами и шарнирно-сочлененной консолью с противовесом для предотвращения наклона тележки во время использования или транспортировки (смотри, например, фиг. 24 и 26-5 заявки США № 15/942,513). Принадлежности могут включать в себя: аппликаторную часть (расходную часть): Расходная часть для сбора аблируемой ткани создает гигиеничное сопряжение между устройством и тканью. Приставка к глазу (необязательная): аппликатор может быть многоразового пользования, легко очищаемым, биосовместимым и стерилизуемым. Педальный переключатель: Управление педальным переключателем для стандартной доставки лазерного излучения.
[00418] Управление глубиной
[00419] В большинстве тканей, прогрессирование заболевания сопровождается изменениями механических свойств. Лазерная спекл-реология (LSR) является новым методом, разработанным нами для измерения механических свойств ткани. При освещении образца когерентным лазерным светом и вычислении спекл-модуляций интенсивности по отраженным лазерным спекл-структурам, методом LSR вычисляют τ, постоянную времени спада декорреляции интенсивности, которая тесно связана с механическими свойствами ткани. Применение технологии LSR может подтверждаться измерением механических свойств ткани. Измерения τ методом LSR выполняли с использованием множества различных фантомов и образцов ткани и сравнивали с комплексным модулем сдвига G*, измеренным с использованием реометра. Во всех случаях наблюдается сильная корреляция между τ и G* (r=0,95, p<0,002). Данные результаты демонстрируют эффективность метода LSR в качестве неинвазивной и бесконтактной технологии оценки механических свойств биологических образцов.
[00420] Как известно, прогрессирование заболевание под влиянием наиболее серьезных факторов смертности, таких как рак и атеросклероз, и ряд других тяжело протекающих заболеваний, включая нейродегенеративное заболевание и остеоартрит, сопровождается изменениями механических свойств тканей. Наиболее надежное доказательно значимости биомеханических свойств для оценки заболевания можно получить с использованием традиционного механического тестирования ex vivo, которое предусматривает окрашивание, растяжение образца или манипуляции с ним. Для удовлетворения потребности в получении механических характеристик in situ можно применить новый оптический метод LSR.
[00421] Когда мутный образец, например, ткань, освещают когерентным лазерным пучком, лучи взаимодействуют с частицами ткани и проходят по путям, имеющим разные длины, вследствие актов многократного рассеяния. Самоинтерференция создает картину из темных и светлых пятен, называемую лазерной спекл-структурой. Вследствие теплового броуновского движения рассеивающих частиц, пути лучей света могут непрерывно изменяться, и спекл-структура флуктуирует на временных промежутках, соответствующих механическим свойствам среды, окружающей центры рассеяния.
[00422] В различных вариантах осуществления могут применяться разомкнутые петли биологической обратной связи во время интраоперационных процедур с использованием хромофора и других процессов биологической обратной связи. В вариантах осуществления на основе хромофоров, насыщение цвета можно измерять с чувствительностью до микрометрических уровней точности с целью определения тканей, подходящих и неподходящих для хирургических операций. Решения относительно импульсного излучения могут приниматься на основании различных предварительно установленных уровней насыщения цвета. Данный подход контрастирует с принятым в современных системах, которые могут использовать цвет или другую систему показателей только для обратной связи с оборудованием визуализации, а не с реальными устройствами подведения лазерного пучка, которые выполняют лечебное воздействие. Аналогично, обход подповерхностной анатомии для прогностической калибровки глубины может использовать средства для расчета глубины в реальном времени, чтобы определять, насколько экстракция или другие лечебные процедуры являются близкими к завершению, при одновременной поддержке активного контроля на предмет нежелательных и непредвиденных анатомических структур. По существу, контроль гидродинамических и других параметров отличается от такового в прежних системах, которые могут контролировать уровни поверхности на предмет отражения, но не могут эффективно измерять глубину в ткани или другом биологическом веществе.
[00423] Метод LSR использует данную концепцию и анализирует декорреляцию интенсивности обратно рассеянных лучей, чтобы получить оценку биомеханики ткани. С данной целью, методом LSR вычисляют функцию декорреляции интенсивности последовательностей спеклов, g2(t) и выводят ее постоянную времени спада, τ, в качестве показателя биомеханических свойств.
[00424] Испытательный стенд для лазерной спекл-реологии
[00425] В ходе некоторых примерных действий, объемные механические свойства ткани и субстратов измеряют с использованием стендовой установки для LSR. Данная установка включает в себя лазер с множеством длин когерентности лазерного излучения, после которого установлены линейный поляризатор и расширитель пучка. Для фокусировки в освещаемое пятно в место на целевой ткани применяются фокусирующая линза и плоское зеркало. Изображения лазерных спекл-структур формируются с использованием высокоскоростной КМОП-видеокамеры. Дополнительные сведения об измерениях методом LSR описаны в заявке США № 15/942,513 и включены в настоящую заявку.
[00426] Системы и способы по настоящей заявке можно применять для измерения дифференциала длины пути фотонов в рассеивающей среде, с использованием характеристик спектрального поглощения воды. Определение дифференциала длины пути является необходимым условием для количественного определения изменений концентрации хромофора, измеряемых методов спектроскопии в ближней инфракрасной области (NIRS). Количественные измерения концентрации хромофора в ткани служат для количественного определения скоростей абляции по глубине с использованием поглощения в воде и измерений с временным разрешением по различным слоям склеральной ткани, так как она зависит от абляционной скорости поглощения, ширины импульса и энергии лазерного пучка. Количественные измерения концентрации хромофора в ткани дополнительно описаны в заявке США № 15/942,513 и включены в настоящую заявку.
[00427] Дополнительные варианты осуществления в настоящей заявке могут включать в себя применение конструкции зонда, который настроен в виде нескольких пар источника-детектора таким образом, что он может работать с источником белого света для получения непрерывных спектров поглощения и сниженных коэффициентов рассеяния. Преимущества такого зонда с несколькими разделенными источниками и детекторами дополнительно описаны в заявке США № 15/942,513 и включены в настоящую заявку.
[00428] В некоторых вариантах осуществления, лазерная система по настоящему изобретение может также включать в себя примерную платформу многослойной визуализации. Платформа может включать в себя: HL - галогенную лампу; MS - зеркальную систему; DD - цифровое устройство возбуждения; L2 - проекционная линза; L3 - линза видеокамеры; LCTF - жидкокристаллический перестраиваемый фильтр; и CCD VC - ПЗС-видеокамеру, или другую подходящую видеокамеру. Можно применить другие подходящие видеокамеры. Дополнительные сведения о платформе для многослойной визуализации описаны в заявке США № 15/942,513 и включены в настоящую заявку.
[00429] Применение флуоресценции: Флуоресцентная спектроскопия является методом, применяемым для различения целевых и нецелевых тканей на основании профиля спектров излучения эндогенных флуорофоров. В настоящем варианте осуществления лазерная система может включать в себя работающие в реальном времени методы на основе флуоресцентной спектроскопии для дискриминации различных составляющих соединительной ткани с целью отличия склеральной соединительной ткани глаза от соседней нецелевой ткани. Данная система обхода анатомических структур может быть применена снова с использованием визуализации в реальном времени, например, датчиков визуализации методом OCT, а также хромофорных датчиков (водных, цветных и т.п.) или спектроскопии без использования флуоресценции.
[00430] Системы по настоящему изобретению могут включать в себя датчик биологической обратной связи, сканер, включающий в себя гальванометр и видеокамеру, которые обеспечивают биологическую обратную связь, которая служит для различения целевых и нецелевых тканей, в дополнение к переходам внутри тканей от одного хромофора к следующему хромофору, в форме чувствительной петли биологической обратной связи. Такие переходы являются относительно высокоэнергетическими и, следовательно, с поглощением ультрафиолетовых, видимых и ближних инфракрасных длин волн. С другой стороны, системы, известные в данной области, используют простую обратную связь на основе изображений для лазерного модуля, который ее выявляет. Поскольку многие биологические молекулы могут поглощать свет посредством электронных переходов, их обнаружение и контроль могут быть полезными общими возможностями визуализации.
[00431] Следует отметить, что обнаружение и контроль хромофора, которые заключаются в использовании цветовых различий на основании характерного поглощения света разными материалами, в качестве метода обнаружения, контроля и определения границ внутри ткани, является полезным усовершенствованием.
[00432] В ходе некоторых примерных действий могут выполняться численные моделирования зональных лечебных воздействий, включающие в себя: базовую модель с жесткостью склеры и напряженностью фиксации, изменяемыми в отдельных полных зонах: комбинации лечебных воздействий в зонах (с изменением и без изменения фиксации): например, раздельные воздействия: 0, 1, 2, 3, 4; комбинированные воздействия: 1+2+3, 1+2+3+4, 0+1+2+3+4; эффективная жесткость: модуль упругости (E)=1,61 МПа, эквивалентная возрасту ~30 лет; ослабление фиксации между склерой и цилиарным телом/сосудистой оболочкой, когда используют значения в исходной модели аккомодации.
[00433] Влияние зонального лечебного воздействия на деформацию цилиарного тела при аккомодации может включать в себя жесткость склеры и жесткость склеры + фиксацию.
[00434] В некоторых вариантах осуществления разные формы областей лечебного воздействия могут применяться в одном квадранте склеры, на основании базового численного моделирования для нескольких (например, 3 или 5) критических зон: базовой модели аккомодации здорового глаза с «состарившейся» склерой: начиная с жесткой склеры: модуль упругости (E)=2,85 МПа, эквивалентный возрасту ~50 лет; напряженная фиксация между склерой и цилиарным телом/сосудистой оболочкой, все остальные параметры изменялись (степень возбуждения цилиарного тела, жесткость других компонентов и т.п.).
[00435] В ходе некоторых примерных действий, численное моделирование лечебного воздействия сложной формы может включать в себя: базовую модель с регионально «леченой» жесткостью склеры: формы с разными площадями лечебного воздействия (без изменения фиксации), что дает леченую жесткость: модуль упругости (E)=1,61 МПа, эквивалентный возрасту ~30 лет; эффективная жесткость в каждой зоне может определяться по величине площади формы в каждой зоне и значениям в исходной модели аккомодации.
[00436] Влияние лечебного воздействия сложной формы на деформацию цилиарного тела при аккомодации может включать в себя только жесткость склеры.
[00437] Лечебная жесткость может зависеть от: объемной доли пор в области лечебного воздействия, т.е. % объема склеры, удаленного лечебным воздействием; при этом объемная доля пор изменяется изменением параметров абляционных пор; и других показателей. Результирующая жесткость оценивалась по комбинации микромасштабных показателей: поры предполагались расставленными параллельно и равномерно/имеющими размеры в пределах объема=объемной доле (% от общего объема склеры); остаточный объем является «состарившейся» склерой (E=2,85 МПа); требуется удалить ~43,5% объема для изменения жесткости склеры в подвергаемой лечению зоне от состарившейся (например, 50-летней) до молодой (например, 30-летней); протоколы (сочетания плотности в % и глубины) допускают максимальную объемную долю 13,7%, что эквивалентно новой жесткости 2,46 МПа; размер матрицы=длине стороны квадратной зоны лечебного воздействия ( мм).
[00438] В некоторых вариантах осуществления учитываемые параметры включают в себя параметры, показанные на фиг. 26-3A, 26-3A1, 26-3A2 и 36 в заявке США 15/942,513.
[00439] На фиг 107 расмотрены и показаны следующие параметры.
[00440] Площадь получающей лечение поверхности=площадь поверхности склеры, которую подвергают лечебному воздействию, (мм2), при этом площадь получающей лечение поверхности=квадрат матрицы.
[00441] Толщина=толщина склеры в зоне лечения (мм), принимаемая равномерной.
[00442] Объем лечебного воздействия=объем склеры, который подвергается лечебному воздействию (мм2),  .
.
[00443] Плотность в %=процент площади, получающей лечение поверхности, занятой порами (%).
[00444] Размер пятна=площадь поверхности одной поры (мм2).
[00445] Число пор=число пор в области лечебного воздействия.
[00446]  *округление до ближайшего целого числа.
*округление до ближайшего целого числа.
[00447] Суммарная площадь поверхности пор=суммарная площадь в пределах площади получающей лечение поверхности, занятая порами: 
 .
.
[00448] Глубина=глубина одной поры (мм); зависит от импульса в каждой поре (ppp).
[00449] Глубина %=процент толщины, продолжающийся внутрь на пору.
[00450]  .
.
[00451] Суммарный объем пор=суммарный объем в пределах площади получающей лечение поверхности, занятый порами.
[00452] Объемная доля=процент объема лечебного воздействия, занятый порами, (%), т.е. процент объема склеры, удаленного лазером.
[00453] 
[00454] Взаимосвязи между параметрами лечебного воздействия включают в себя: входные параметры лазерного лечебного воздействия; свойства склеры; данные ввода для вычисления новой жесткости.
[00455] Вычисление новой жесткости склеры в области лечебного воздействия.
[00456] Объемная доля=процент объема лечебного воздействия, занятый порами, (%), т.е. процент объема склеры, удаленного лазером.
[00457]
[00458] Жесткость=модуль упругости склеры до лечения (МПа).
[00459] Жесткость после лечения=модуль упругости склеры после лечения, (МПа); по оценке на микромасштабной комбинированной модели.
[00460] 
[00461] Входные параметры лазерного лечебного воздействия: свойства склеры, данные ввода для вычисления новой жесткости, вводимые в конечно-элементную модель получающих лечение зон, влияние объемной доли только на деформацию цилиарного тела при аккомодации: только жесткость склеры, полная область зоны, подвергнутая воздействию (доля области=1).
[00462] Протоколы=диапазон возможных комбинаций плотности % и глубины, склера во всех зонах, измененная до жесткости после лечения, соответствующей объемной доле пор.
[00463] Влияние объемной доли на деформацию цилиарного тела при аккомодации:
жесткость склеры+фиксация, полная область зоны, подвергнутая воздействию (доля области=1), в здоровом состоянии=результаты расчетов на модели исходной аккомодации.
[00464] Протоколы=диапазон возможных комбинаций плотности % и глубины, склера во всех зонах, измененная до жесткости после лечения, соответствующей объемной доле пор, влияние объемной доли на деформацию цилиарного тела при аккомодации: жесткость склеры+форма зоны лечения.
[00465] Протоколы=диапазон возможных комбинаций плотности % и глубины, склера во всех зонах, измененная до жесткости после лечения, соответствующей объемной доле пор и доле зоны лечения в области.
[00466] Расчет Дж/см2: Дж/см2 × Гц (1/с) × Размер поры (см2)=Вт; Дж/см2=Вт/Гц/размер поры. Пример: пятно является фактически «квадратным», поэтому площадь будет рассчитываться как площадь квадрата: 7,2 Дж/см2=1,1 Вт/300 Гц/ (225 мкм × 10-4)2.
[00467] Факторы, которые могут повлиять на глубину абляции в % во время хирургической операции на живом глазу включают в себя: влагосодержание на поверхности и внутри ткани, слой теноновой фасции или конъюнктивы, угол лазерного пучка, тепловое повреждение, возможно применение водяной ирригации, криорошения/охлажденных глазных капель, картриджа с криогидрогелем в лазерной расходной системе (интраоперационные лекарственные препараты, такие как антибиотики/стероиды).
[00468] В некоторых вариантах осуществления описанные системы, способы и устройства по изобретению могут дополнительно включать в себя следующие признаки.
[00469] Регулируемая плотность микропор: контроль дозы и воспаления может достигаться за счет переменного числа микропор, создаваемых в каждой зоне лечения. Регулируемый размер микропор; доза и гибкое изменение узора микропорации. Регулируемый тепловой профиль микропор: система может создавать микропоры с регулируемыми тепловыми профилями, которые минимизируют риск образования зоны коагуляции. Регулируемая глубина с распознаванием глубины: система создает микропоры с возможностью управления и не допускает слишком глубокой абляции. Распознавание анатомических структур для обхода кровеносных сосудов. Степень безопасности при работе с лазерами: устройство является лазерным устройством класса 1c, система обнаруживает контакт с глазом, и приставка к глазу закрывает роговицу. Встроенное средство откачивания дыма и фильтрации: фракционная абляция может осуществляться без лишней потребности в установке системы откачивания дыма, поскольку дым, пар и тканевые частицы будут отсасываться непосредственно встроенной системой. Лазерная система будет содержать встроенную видеокамеру реального времени (например, эндоскопическую видеокамеру, ПЗС-видеокамеру) с петлей биологической обратной связи, связанной с лазерной системой наведения, объединенной с дисплеем GUI для контроля глубины/ограничительного управления.
[00470] В некоторых вариантах осуществления описанные системы, способы и устройства по изобретению могут обеспечивать: Петлю биологической обратной связи лазерной системы, интегрирующую распознавание изменения цвета хромофоров с использованием содержания меланина (компьютерное интегрирование различных стадий создания микропоры при изменении цвета; априорную информацию о глубине в 3 зонах толщины; лазерную систему, способную интегрировать картирование априорной толщины склеры для передачи в средство планирования наведения лазера и средство микропорации склеры; применение метода OCT или ультразвуковой биомикроскопии (UBM), или 3D томографии; код программирования лазерной системы с управлением импульсами для каждой процедуры; электронный канал связи для передачи данных в отчет (калибровочных данных и служебных данных, статистических данных и т.п.). Компоненты лазерной системы могут иметь модульную компоновку для удобного проведения технического обслуживания и ремонта. Возможно включение в состав самоповеряющейся схемы, а также калибровки процедуры в реальном времени до лечебного воздействия, после лечебного воздействия и перед следующим лечебным воздействием. Все калибровки могут записываться в базу данных. Другие характерные возможности могут включать в себя связной порт для оперативной связи (например, сервисный поиск и устранение неисправностей с использованием WIFI, генерация отчетов и связь с сервером, WIFI доступ к диагностической информации (коду ошибок/затребование частей) и либо выписку ремонта и технического обслуживания для поиска и устранения неисправностей, либо выписку заказа на обслуживание сервисным сотрудником). Некоторые варианты осуществления могут включать в себя сервисный набор запасных частей для сервисного обслуживания и ремонта на месте эксплуатации; ключ-карту лазерной системы вместе с программированием управляемых импульсов, с включением ограничения по времени; пилотный пучок с гибко настраиваемой формой для установки граничных условий, а также для включения, если на оси находится сопло химического лазера, выравнивания и позиционирования; пилотный пучок, совпадающий с пучком фиксации настройки для запуска системы по принципу годен-не годен с целью начала лечебной абляции; требования к лазерной системе, содержащие систему слежения за движениями глаза и соответствующую систему фиксации глаза для безопасной абляции с управлением перемещением глаза; требования к лазерной системе, содержащие возможность выполнения «осевой» доставки энергии посредством гониометрической системы зеркал, чтобы производить микропорацию на склере, или посредством применения щелевой лампы, или с распространением в свободном объеме. Данные решения могут потребовать высокую мощность, высокое качество пучка, а также интеграцию точки фиксации и/или системы слежения за движениями глаза. Высокое качество пучка может означать: фокусировку лазерной системы в пятно от 50 мкм и вплоть до 425 мкм. Лазерная система может выполнять высокоскоростную процедуру в диапазоне углов 360 градусов посредством сканирования гальванометрическими зеркалами и применения робототехнических средств изменения квадрантных лечебных воздействий в пределах 40-45 секунд на весь глаз (например, 4 квадранта в каждом глазу, приблизительно 10 секунд на квадрант; переключение положения лазера на последующий квадрант в течение 1-2 секунд). Лазерная система может быть рабочей станцией со встроенным педальным переключателем, компьютерным монитором; системой OCT; ПЗС-видеокамерой и/или микроскопической системой. Лазерная система может включать в себя модуль стола/кресла для позиционирования пациента, который может приспосабливаться из лежачего положения; с переналаживаемым углом; или в сидячем положении; и кресло с электроприводной подачей.
[00471] В ходе некоторых примерных действий, описанные системы, способы и устройства по изобретению могут включать в себя следующую медицинскую процедуру: 1) Пользовательское руководство может давать информацию относительно обращения с системой. 2) Поместить глазной аппликатор на зону лечения и поместить аппликаторный блок на глазной аппликатор. 3) Пользователь может установить параметры лечебного воздействия. 4) Пользователь начинает процедуру лечения. 5) Пользователю может предоставляться информация о текущем состоянии лечения. 6) Пользователю может предоставляться информация о калибровке подводимой энергии к глазу, до и после лечебного воздействия. 7) Для устранения нежелательных запахов, рассеяние дыма от абляции может предотвращаться. 8) Пользователю может предоставляться информация о визуализации глаза во время лечения, между квадрантами и после лечения.
[00472] Микропорации - Примерные параметры
[00473] Эксплуатация системы может осуществляться с помощью предварительно одобренной электронной ключ-карты. Визуализация, требуемая во время хирургической операции: Подсвечивание глаза, чтобы способствовать обеспечению визуализации, источником света, либо внешним, либо встроенным в устройство фиксации переходника лазера, видеокамера и интерфейс GUI к компьютерному монитору может быть требуемым модулем. Пациент может находиться в горизонтальном или наклонном, или сидячем положении. Возможно, потребуется ограждение для защиты глаза пациента во время процедур. Работа: Система может допускать включение лазера, когда присоединены аппликатор и аппликаторная часть, при надлежащем контакте с тканью и проверенном доступе пользователя. Контроль глубины пор: максимальная глубина, контролируемая концевым переключателем (с оптическим или эквивалентным контролем). Управление перемещением глаза во время процедуры: Для полностью бесконтактной процедуры на глазу можно включить технологию слежения за движениями глаза, с соответствующими точками фиксации глаза. Обход сосудистой сети: Может обеспечиваться сканирование/определение сосудистой сети глаза, чтобы избегать микропорации в данной области. Смотри фиг. 4A-1-4A-10 в заявке США 15/942,513, которые показывают, как микропорацию/нанопорацию можно применять для удаления поверхностной, подповерхностной и промежуточной ткани и изменения поверхностных, промежуточных биомеханических характеристик (например, планарности, поверхностной пористости, геометрии ткани, вязкоэластичности ткани и других биомеханических и биореологических характеристик) аблируемой целевой поверхности или целевой ткани.
[00474] Требования к рабочим характеристикам могут включать в себя: Изменяемый размер пор, размер матрицы пор и местоположение пор. Примерное время подготовки: 5 мин с момента включения питания устройства до начала процесса микропорации (принято среднее время реакции пользователя). Робототехнические средства, встроенные по квадрантам, для обеспечения требований к времени лечебного воздействия. Время лечебного воздействия может быть <60 с, 45с на одну процедуру. Диаметр микропор: Регулируемый в пределах 50 мкм - 600 мкм. Скорость абляции ткани: регулируемая в диапазоне 1-15%. Размер матрицы микропорации: Площадь, регулируемая от 1 мм × 1 мм и до 14 × 14 мм, квадратная форма матрицы с порами специальной формы. Возможность получения нескольких узоров абляции. Короткое нажатие для включения и выключения лазера: реальный процесс микропорации может быть начат всего лишь кратковременным нажатием педального переключателя, вместо его нажатия в течение всей микропорации. Выключение лазера может производиться идентичным образом. Глубина аблируемой поры: от 5% to 95% от толщины склеры. Биосовместимость: Все части, контактирующие с тканью, должны быть изготовлены из материалов, которые соответствуют требованиям к медицинским устройствам.
[00475] В некоторых вариантах осуществления, система может включать в себя: лазер с длиной волны длина волны: 2900 нм +/- 200 нм; около максимума поглощения воды в среднем ИК диапазоне спектра. Максимальная плотность лазерной энергии: ≥15,0 Дж/см2 на ткани, ≥25,0 Дж/см2 на ткани; для расширения возможностей лечения 2900 nm +/- 200 нм; около максимума поглощения воды в среднем ИК диапазоне спектра. Комбинации настроек лазера: Частота повторения и длительность импульса лазера могут допускать регулировку с использованием предварительно заданных комбинаций в диапазоне 100-500 Гц и 50-225 мкс. Упомянутый диапазон может быть минимальным диапазоном, например, при ≥15,0 Дж/см2 на ткани, или ≥25,0 Дж/см2 на ткани, для расширения возможностей лечения. Число импульсов на каждую пору при агрессивной тактике лечения: Для образования глубоких микропор в дерме, например, с глубиной >1 мм, можно также выбрать настройки для «агрессивной» тактики лечения. Поскольку глубина регулируется, главным образом, интегральной плотностью потока, то большое число импульсов на каждую из пор должно автоматически приводить к увеличению значений глубины. Следовательно, значения чисел импульсов на пору (PPP) могут быть регулируемыми в диапазоне 1-15 PPP. Защита от ударов и вибраций:
[00476] В некоторых вариантах осуществления описанные системы, способы и устройства по изобретению могут включать в себя защитную линзу, как показано на фиг. 27A-27C в заявке США 15/942,513.
[00477] В некоторых вариантах осуществления описанные системы, способы и устройства по изобретению могут включать в себя векорасширитель, показанный в различных вариантах осуществления на фиг. 136-138 и фиг. 28A-29B в заявке США 15/942,513.
[00478] Один(на) или более из компонентов, процессов, признаков и/или функций, представленных на фигурах, можно располагать иначе и/или объединять в единственном компоненте, блоке, признаке или функции или реализовать в виде нескольких компонентов, этапов или функций. Можно ввести дополнительные элементы, компоненты, процессы и/или функции, не отступая от изобретения. Устройства и/или компоненты, изображенные на фигурах, могут быть выполнены с возможностью реализации одного или более из способов, признаков или процессов, показанных на фигурах. Алгоритмы, описанные в настоящей заявке, могут быть также эффективно реализованы в программном обеспечении и/или заложены в аппаратуре.
[00479] Следует отметить, что аспекты настоящего изобретения могут быть описаны в настоящей заявке в виде процесса, который представлен блок-схемой последовательности операций, маршрутной схемой, структурной схемой или блок-схемой. Хотя блок-схема последовательности операций может описывать операции как последовательный процесс, многие из операций могут выполняться параллельно или одновременно. Кроме того, возможна перестановка порядка операций. Процесс заканчивается, когда выполнение операций завершается. Процесс может соответствовать способу, функции, процедуре, стандартной программе, подпрограмме и т.п. Когда процесс соответствует функции, его окончание соответствует возврату функции к вызывающей функции или главной функции.
[00480] В различных вариантах осуществления алгоритмы и другие программные средства, применяемые для реализации систем и способов, раскрытых в настоящей заявке, обычно хранятся в долговременной компьютерно-читаемой памяти и обычно содержат команды, которые, при выполнении одним(ой) или более процессорами или процессорными системами, связанными с упомянутой памятью, выполняют этапы для осуществления объекта изобретения, описанного в настоящей заявке. Осуществление визуализации, машинного обучения, прогнозирования, автоматической коррекции и другого объекта изобретения, описанного в настоящей заявке, можно использовать с современными и разрабатываемыми на перспективу медицинскими системами и устройствами, чтобы выполнять медицинские процедуры, которые обеспечивают преимущества, неизвестные к настоящему времени в рассматриваемой области.
[00481] В некоторых вариантах осуществления описанные системы, способы и устройства выполняются до или одновременно с различными медицинскими процедурами. В некоторых вариантах осуществления они могут быть реализованы в виде самостоятельных систем, способов и устройств, вместе с любыми требуемыми компонентами для достижения соответствующих целей, как будет понятно специалистам в данной области. Следует понимать, что медицинские процедуры, получающие пользу от информации, приведенной в настоящей заявке, не ограничиваются реализацией, использующей далее приведенную информацию, но пользу могут получать также и другие процедуры, ранее известные, выполняемые сейчас и разрабатываемые на перспективу.
[00482] Вышеописанные реализации считаются новаторскими по сравнению с известным уровнем техники и полагаются критически важными для применения, по меньшей мере, одного аспекта изобретения и для достижения вышеописанных целей. Формулировки, примененные в описании для представления настоящих вариантов осуществления, следует понимать не только в смысле их обычно установленных значений, но с включением специального толкования в структуре настоящего описания, материала или действий сверх объема обычно установленных значений. Таким образом, если в контексте настоящего описания можно понимать, что элемент включает в себя больше одного значения, то его применение следует понимать как обобщенное для всех возможных значений, поддерживаемых описанием и формулировкой и формулировками, описывающими элемент.
[00483] Толкования вышеописанных формулировок или элементов чертежей, предусматривают включение не только комбинации элементов, которые описаны в прямой форме, но всех эквивалентных структуры, материала или действий для выполнения, по существу, той же функции, по существу, таким же способом, чтобы получить, по существу, такой же результат. Поэтому в этом смысле предполагается, что любой один из описанных элементов и различных его вариантов осуществления можно эквивалентно заменить двумя или более элементами или, что два или более элементов можно заменить единственным элементов в пункте формулы изобретения.
[00484] Изменения заявленного объекта изобретения, обнаруживаемые средним специалистом в данной области, не известные или разработанные позднее, определенно считаются эквивалентами в пределах предполагаемого объема изобретения и различных вариантов его осуществления. Поэтому очевидные замены, ставшие известными в настоящее время или позднее среднему специалисту в данной области, устанавливаются как не выходящие за пределы объема описанных элементов. Таким образом, предполагается, что настоящее раскрытие следует понимать как включающее в себя все, что конкретно представлено на иллюстрациях и описано выше, что является концептуально эквивалентным, что является очевидно заменимым, а также что включает в себя основные идеи.
[00485] В вышеприведенном описании и на фигурах, одинаковые элементы обозначены одинаковыми цифровыми позициями. Применение «например», «и т.п.», и «или» указывает на несключающие альтернативы без ограничения, если не указано иное. Применение «включающий в себя» или «включает в себя» означает «включающий в себя, но без ограничения», или «включает в себя, но без ограничения», если не указано иное.
[00486] Вышеприменяемое выражение «и/или», поставленное между первым объектом и вторым объектом означает одно из следующего (1) первый объект, (2) второй объект, и (3) первый объект и второй объект. Несколько объектов, перечисленных через «и/или» следует трактовать таким же образом, т.е. «один или более» объектов, соединенных таким образом. Кроме объектов, специально обозначенных через «и/или», могут присутствовать другие объекты, связанные ли или не связанные со специально обозначенными объектами. Таким образом, в качестве неограничивающего примера, упоминание «A и/или B», при использовании в связи с неограниченным выражением, таким как «содержащий», может относиться, в одном варианте осуществления, только к A (при желании, включающем другие объекты, кроме B); в другом варианте осуществления, только к B (при желании, включающем в себя другие объекты, кроме A); в еще одном варианте осуществления, как к A, так и к B (при желании, включающим в себя другие объекты). Данные объекты могут быть элементами, действиями, конструкциями, процессами, операциями, значениями и тому подобное.
[00487] Следует отметить, что там, где в настоящей заявке приведен(о) отдельное(ый) значение или диапазон значений (например, 5, 6, 10, 100 и т.п.), следует помнить, что значение или диапазон значений могут быть более широко, чем отдельное(ый) число или диапазон чисел, если не указано иное. Любые отдельные значения, упомянутые в настоящей заявке, представлены просто как примеры.
[00488] Толкования различных терминов, использованных выше и по всему настоящему изобретению, могут иметь толкования, установленные в заявке США № 15/942,513, предварительной заявке США № 62/843,403, тайваньской заявке № 108111355, и международной заявке № PCT/US18/25608, которые в полном объеме включены в настоящую заявку.
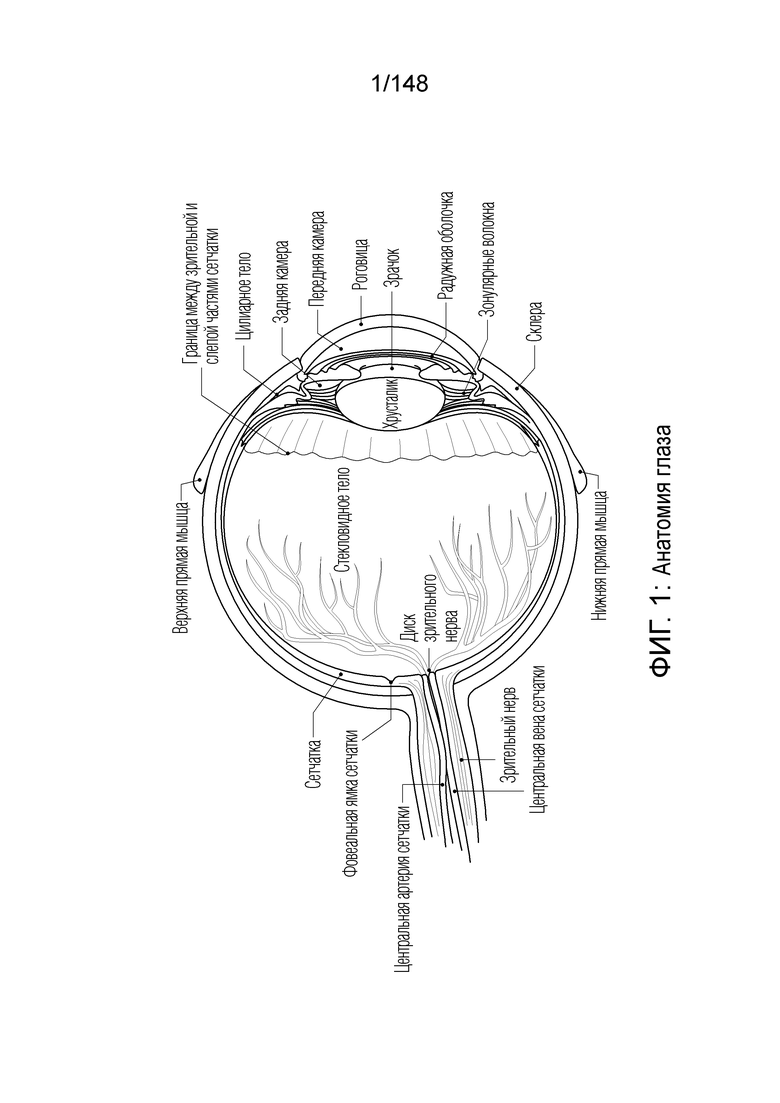



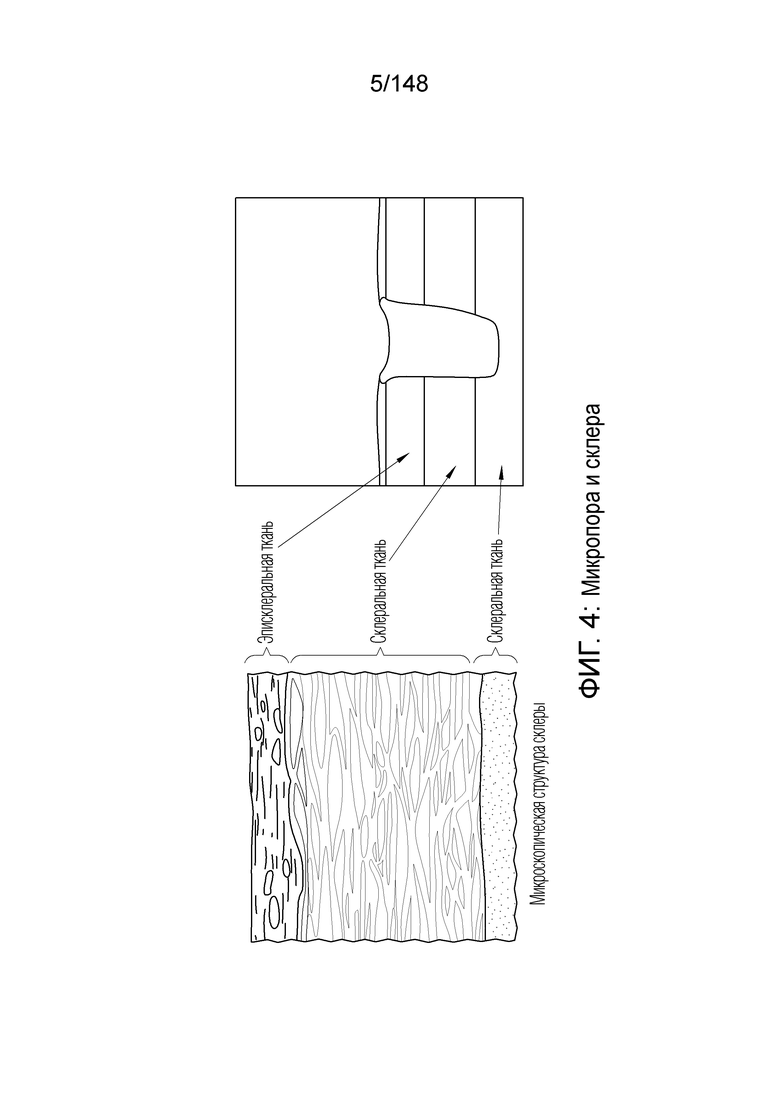

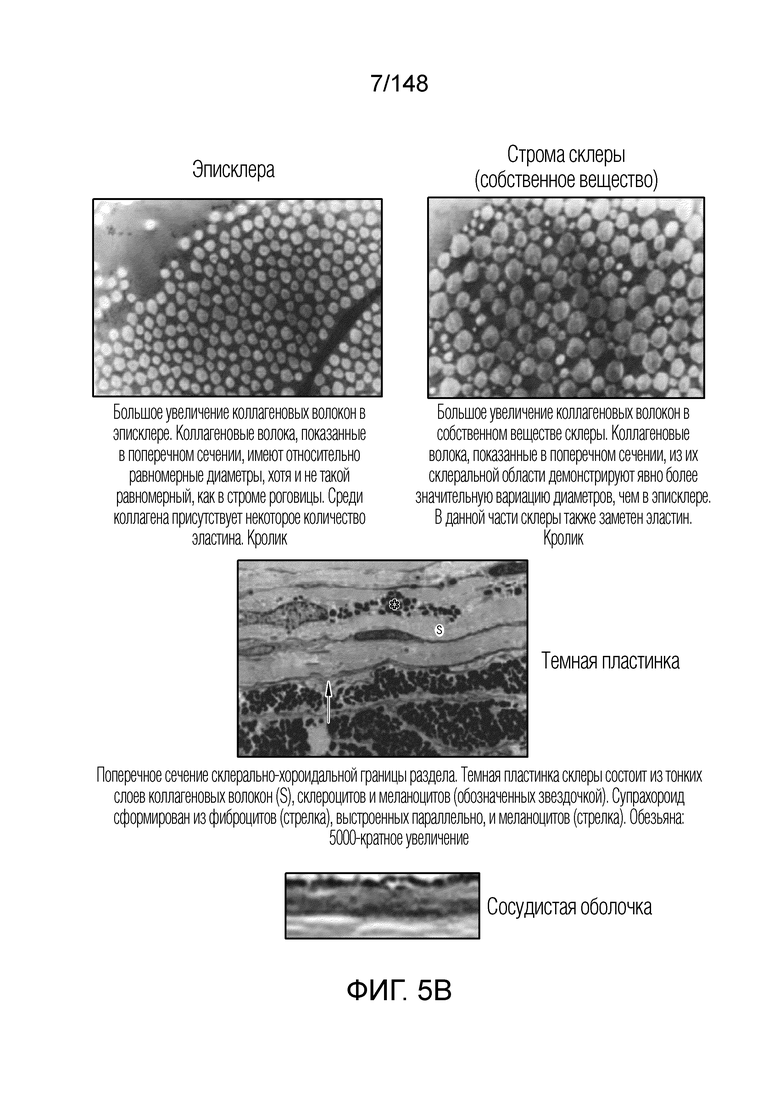
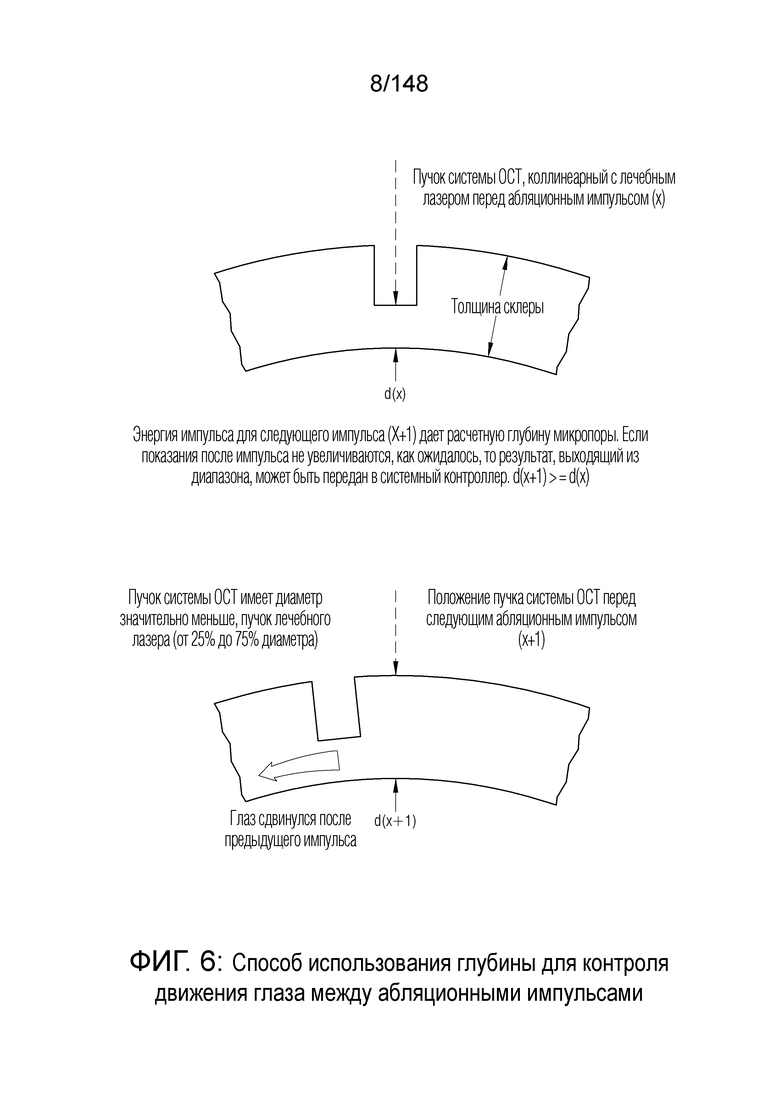

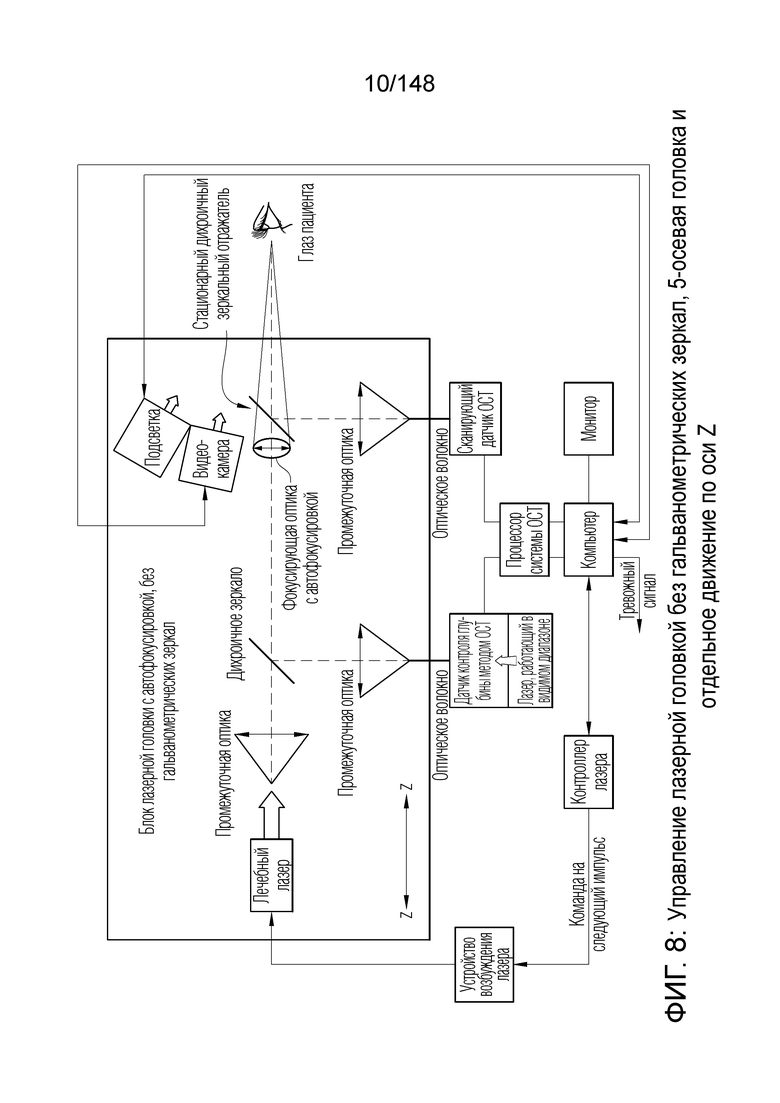
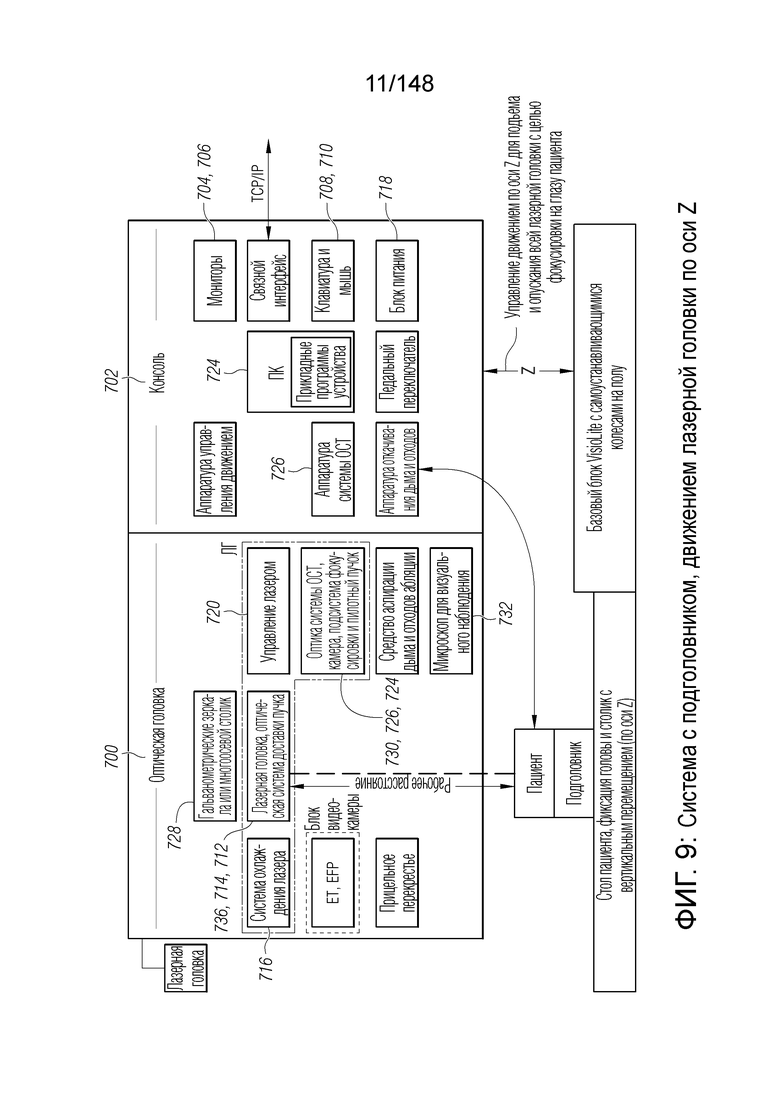

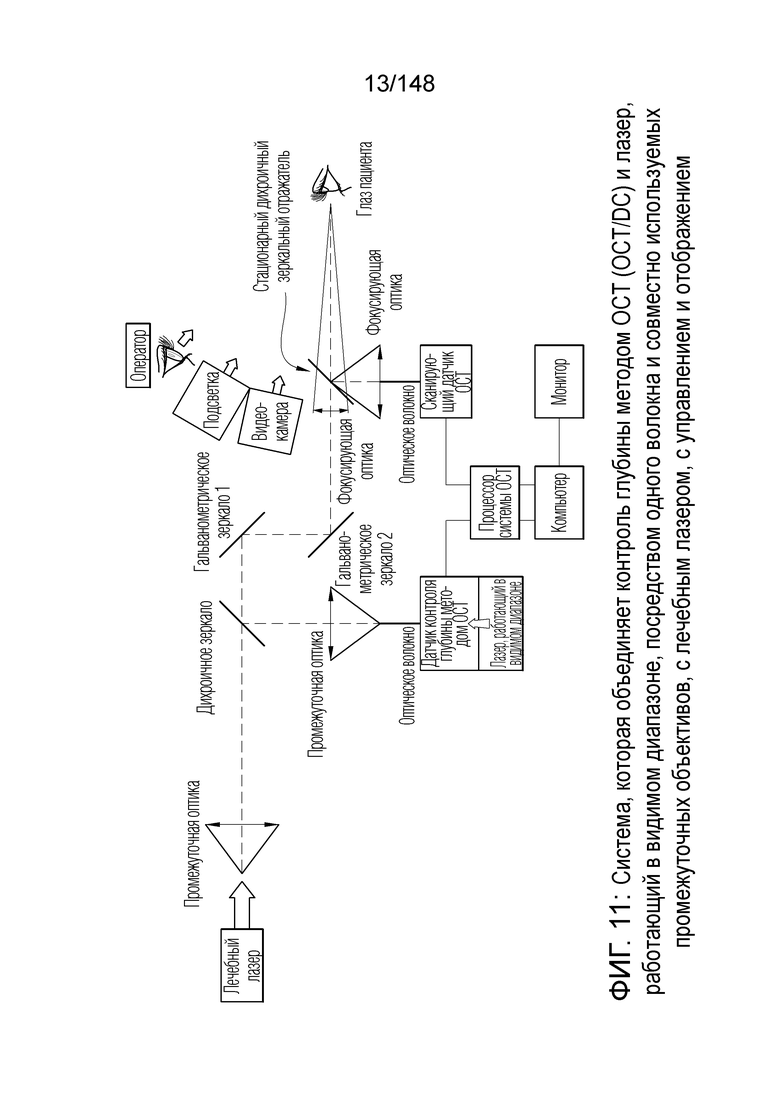
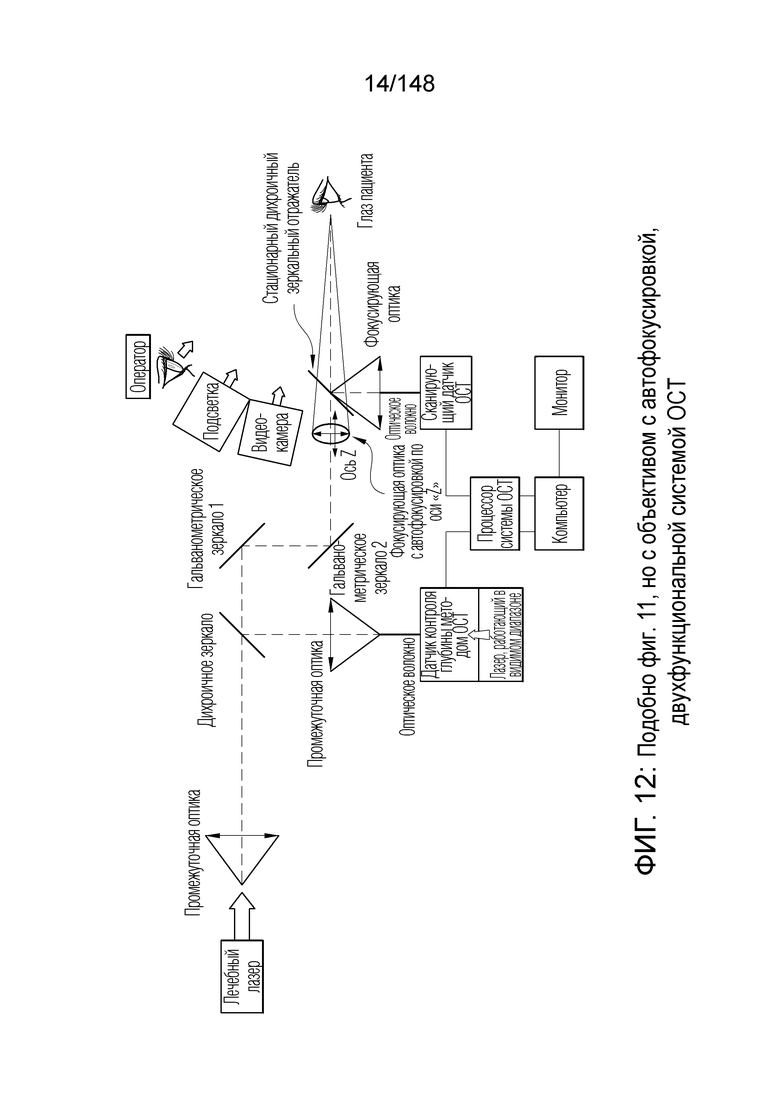
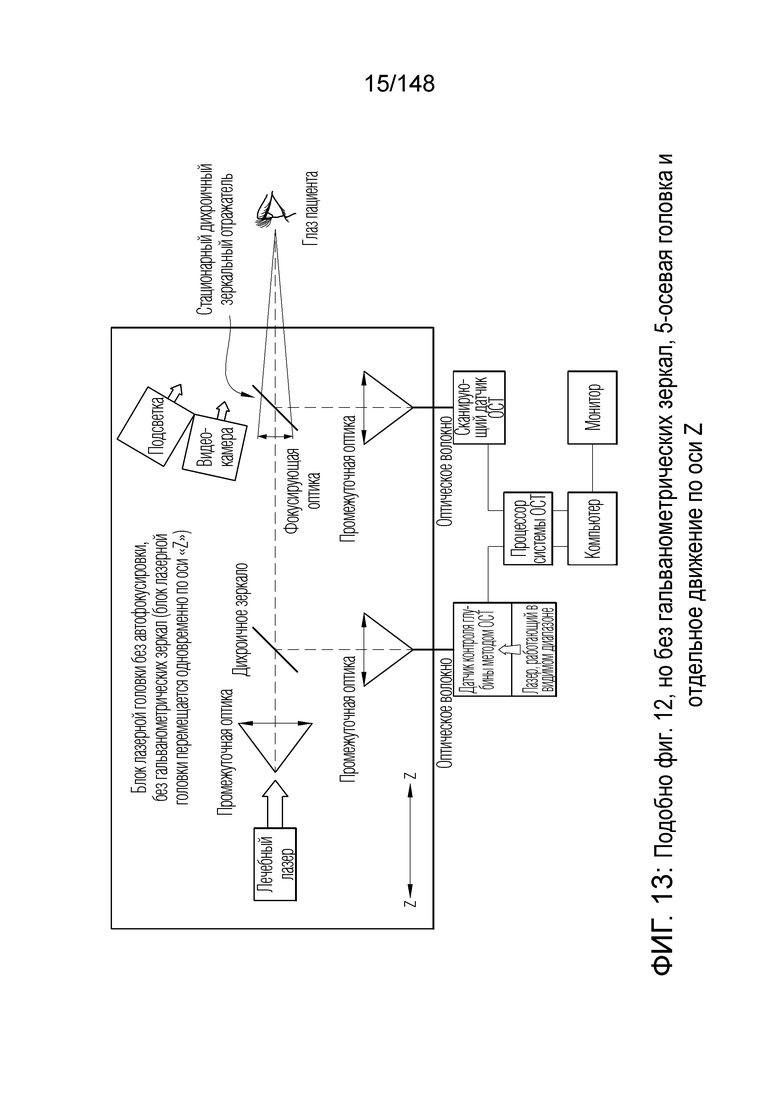


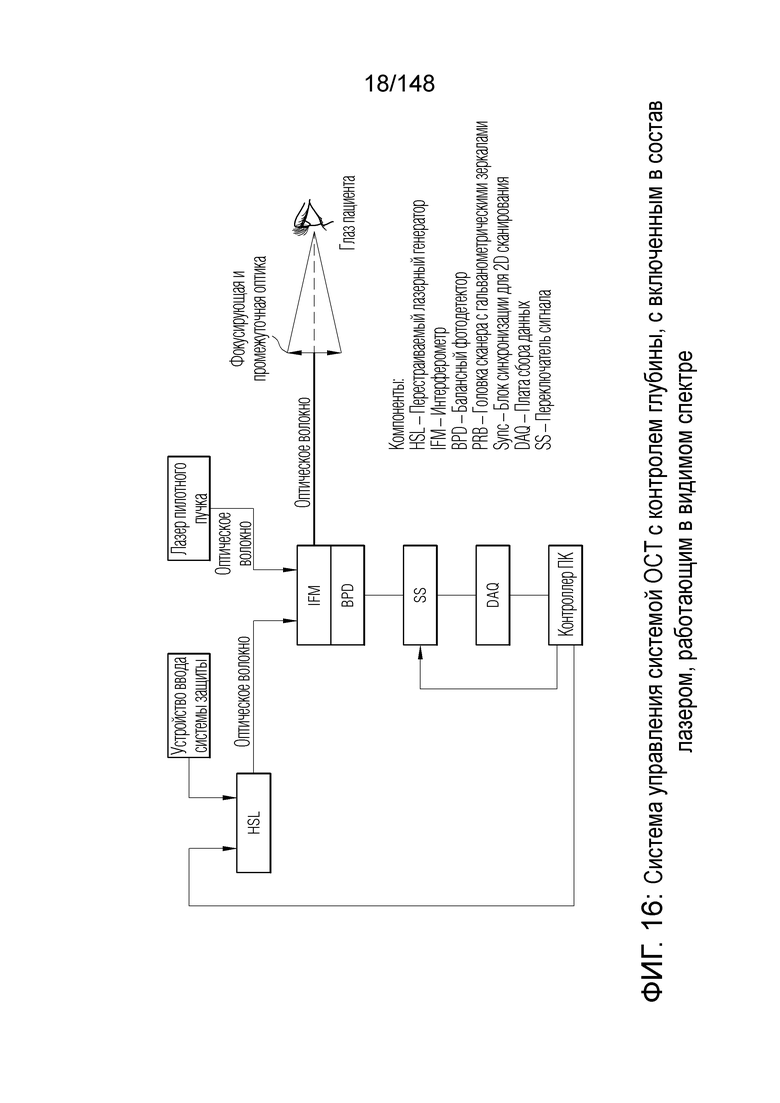
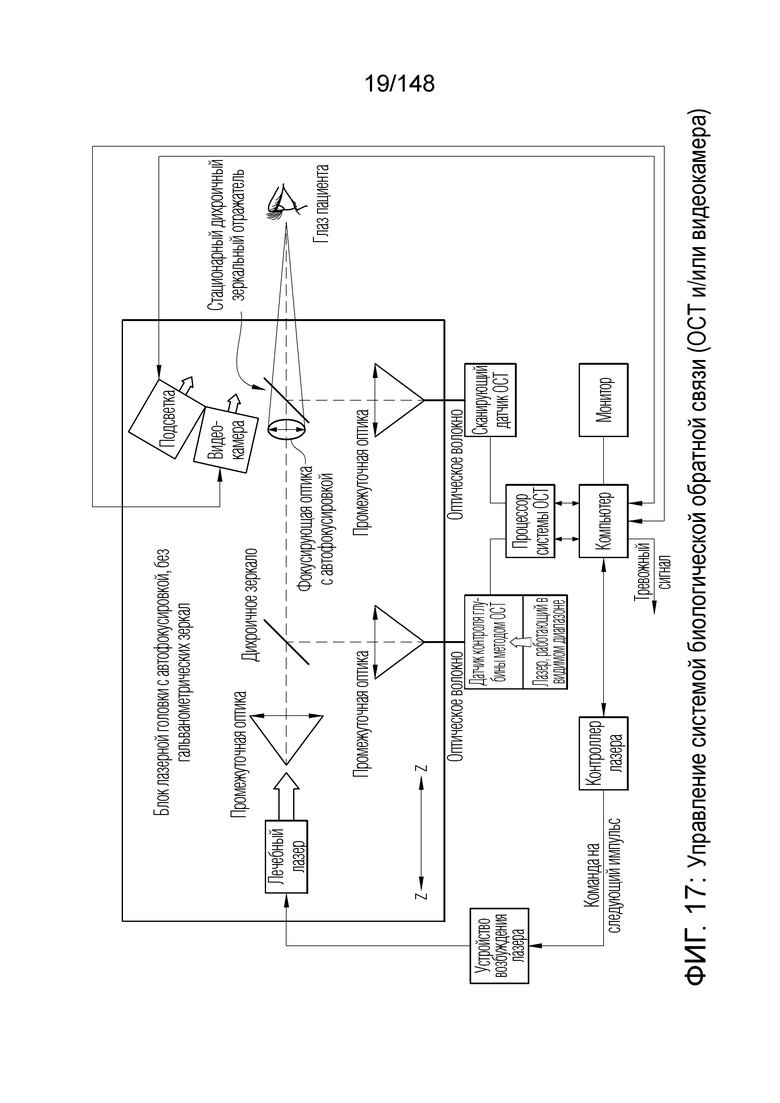

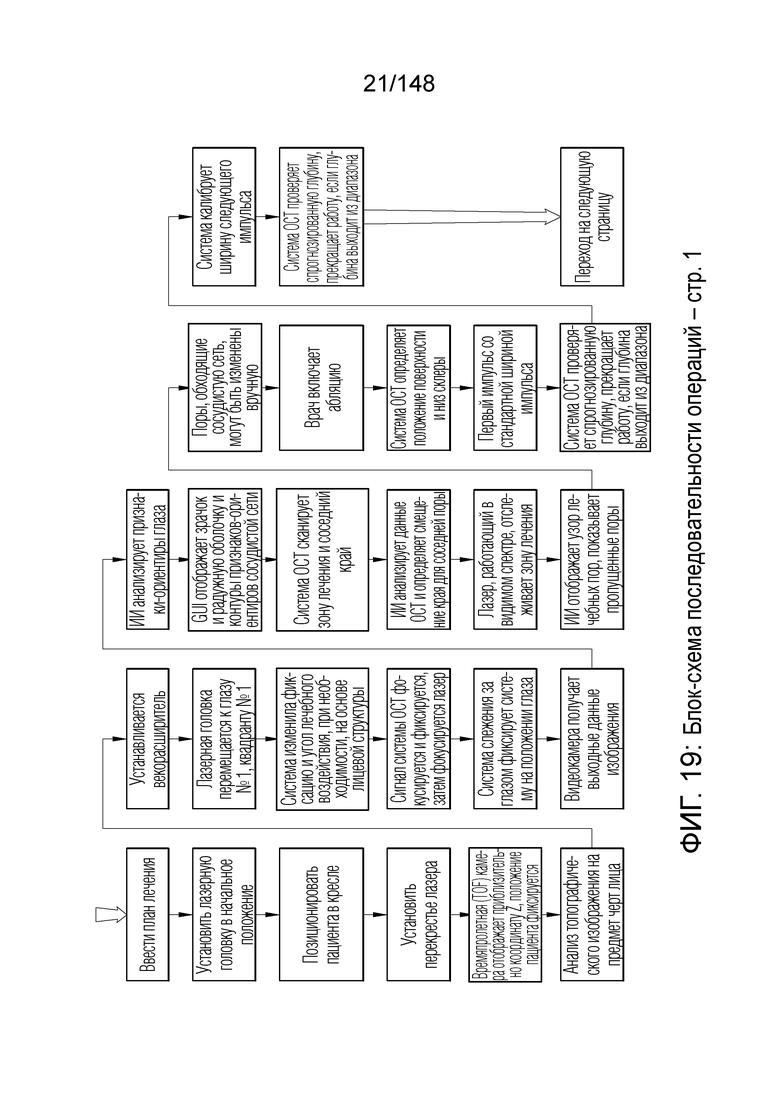



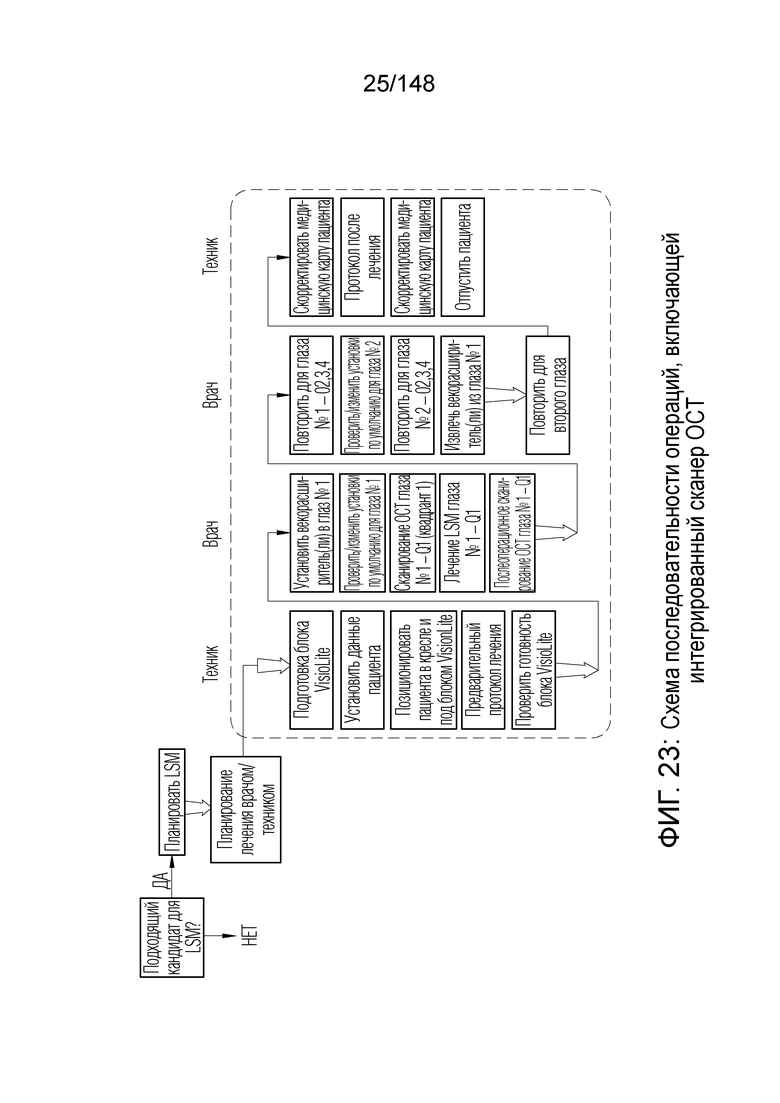

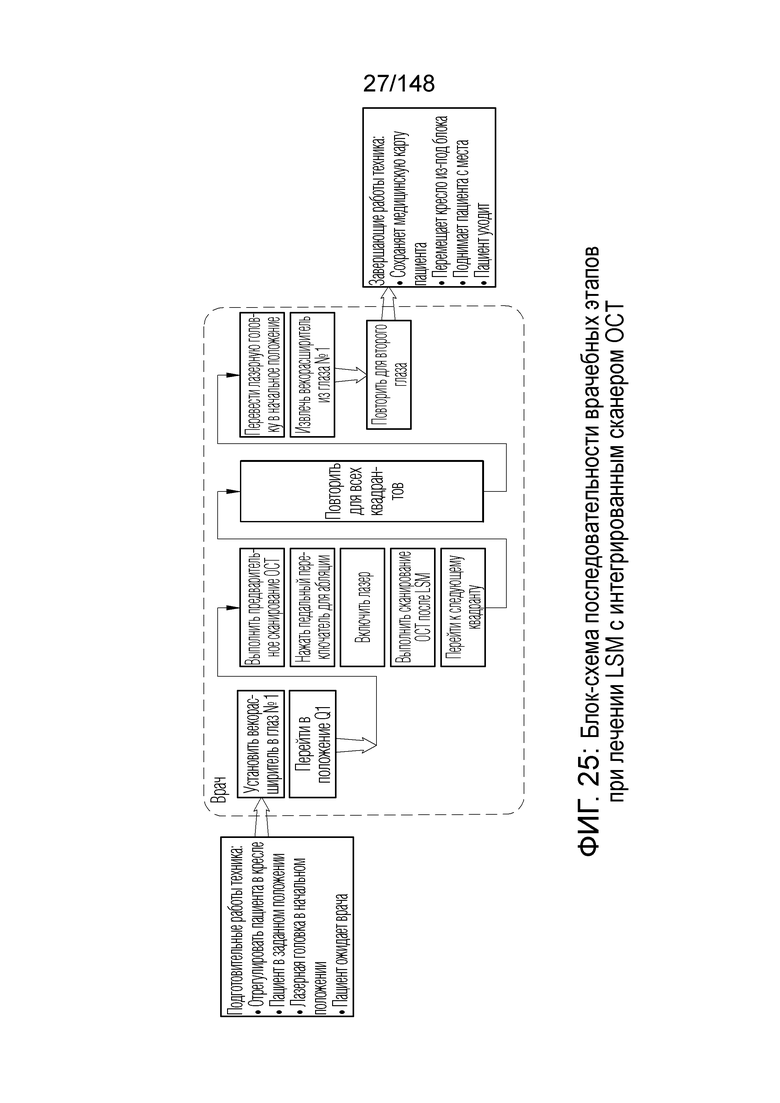
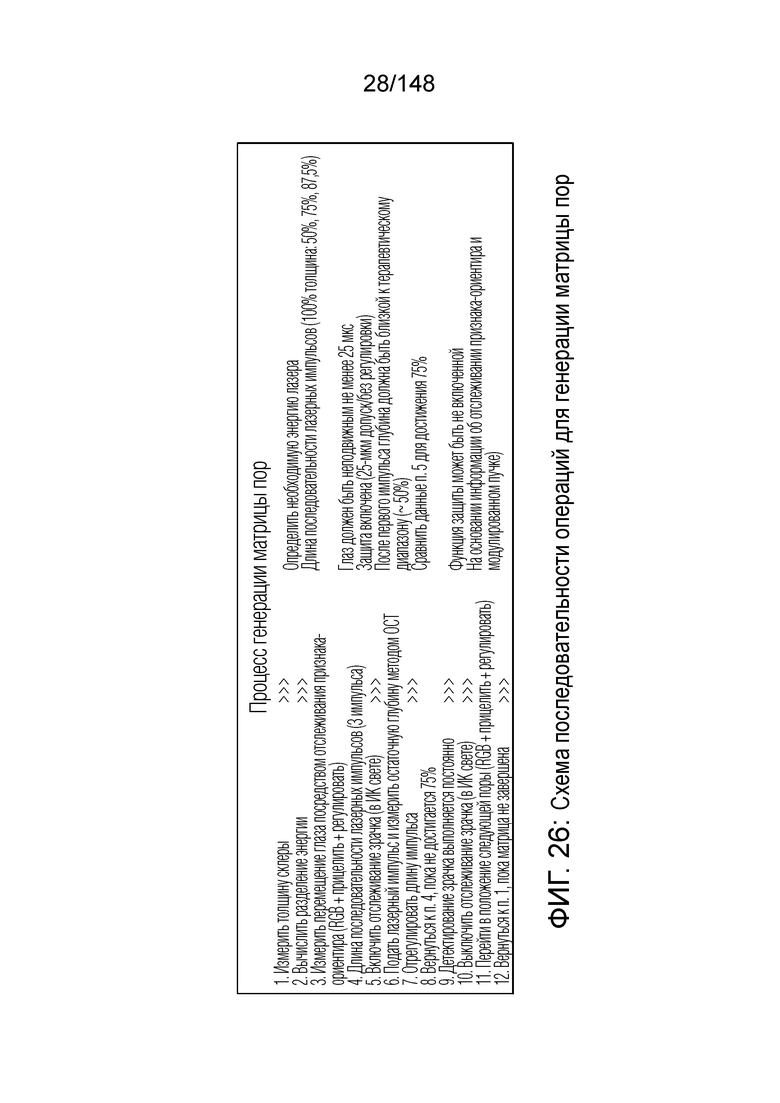





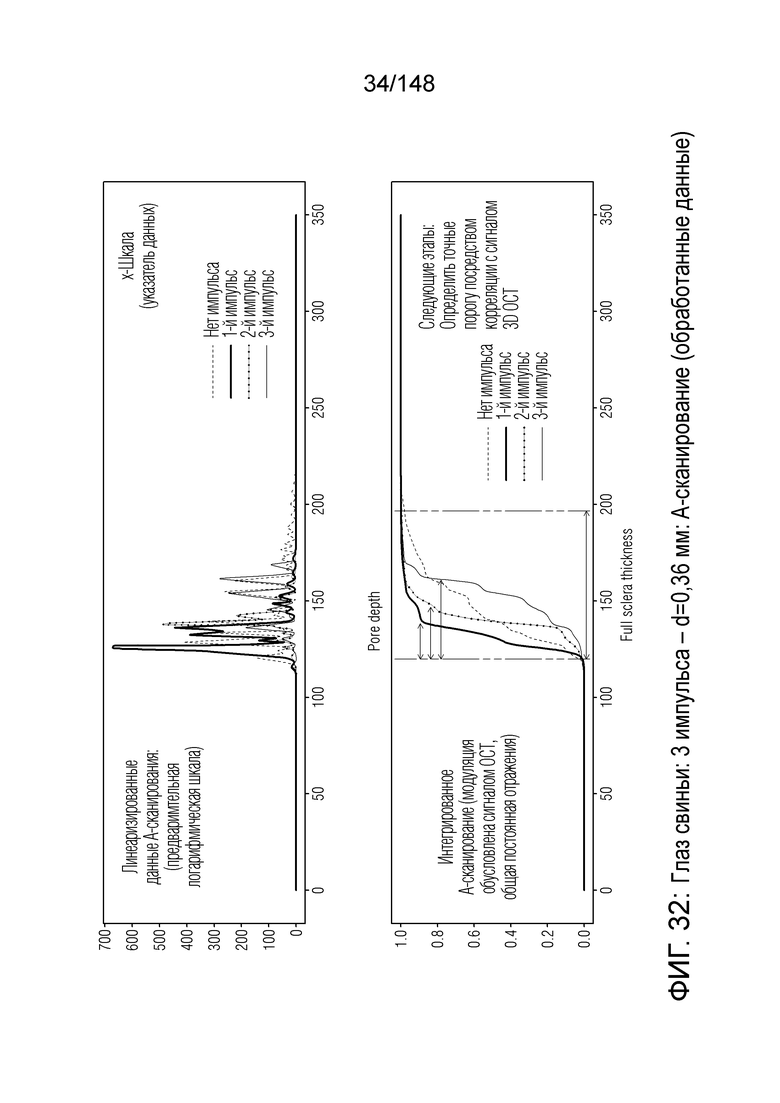
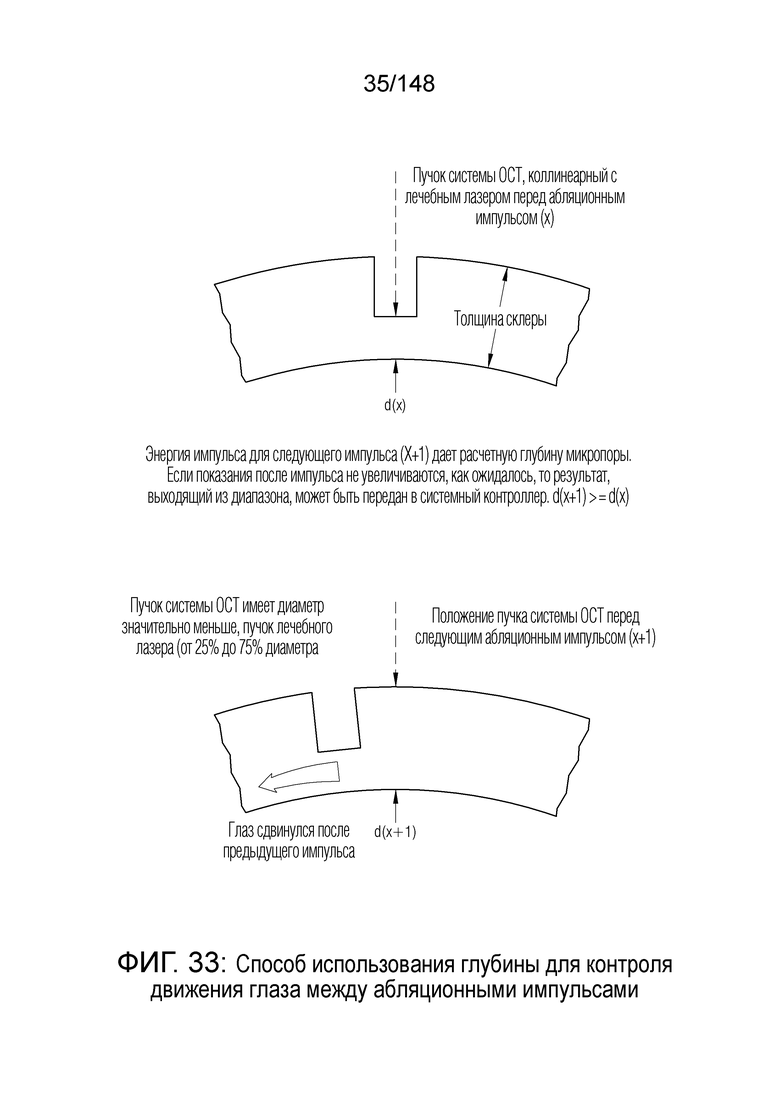
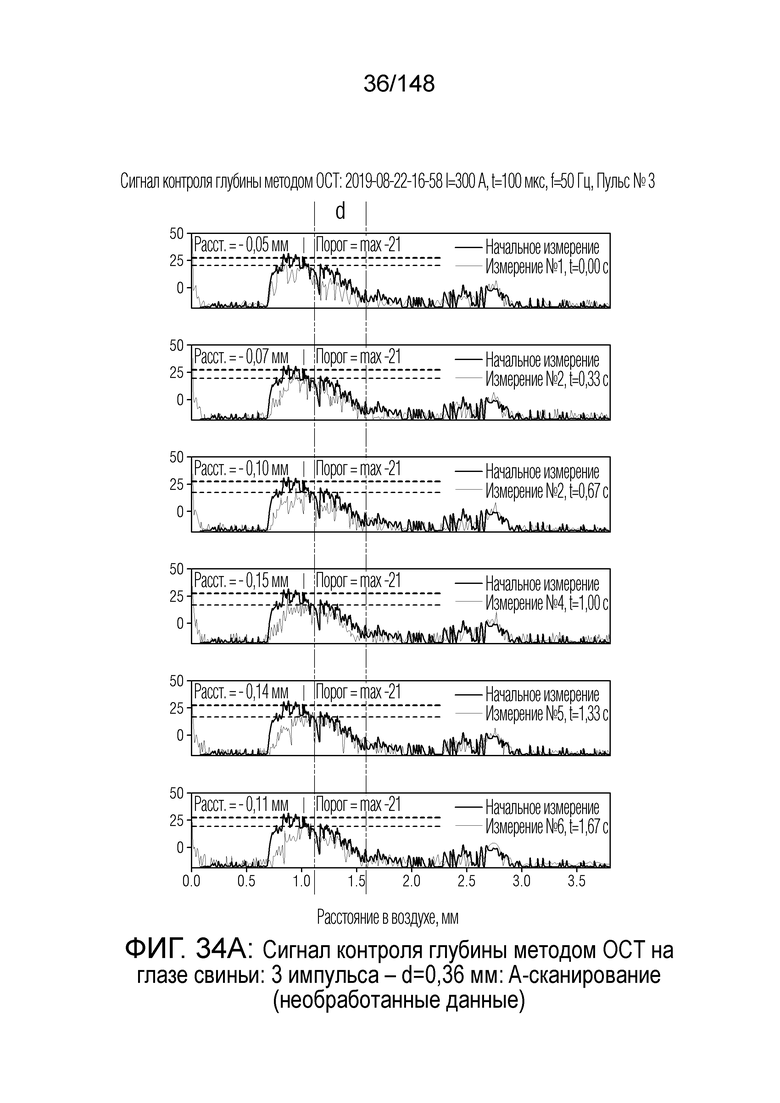
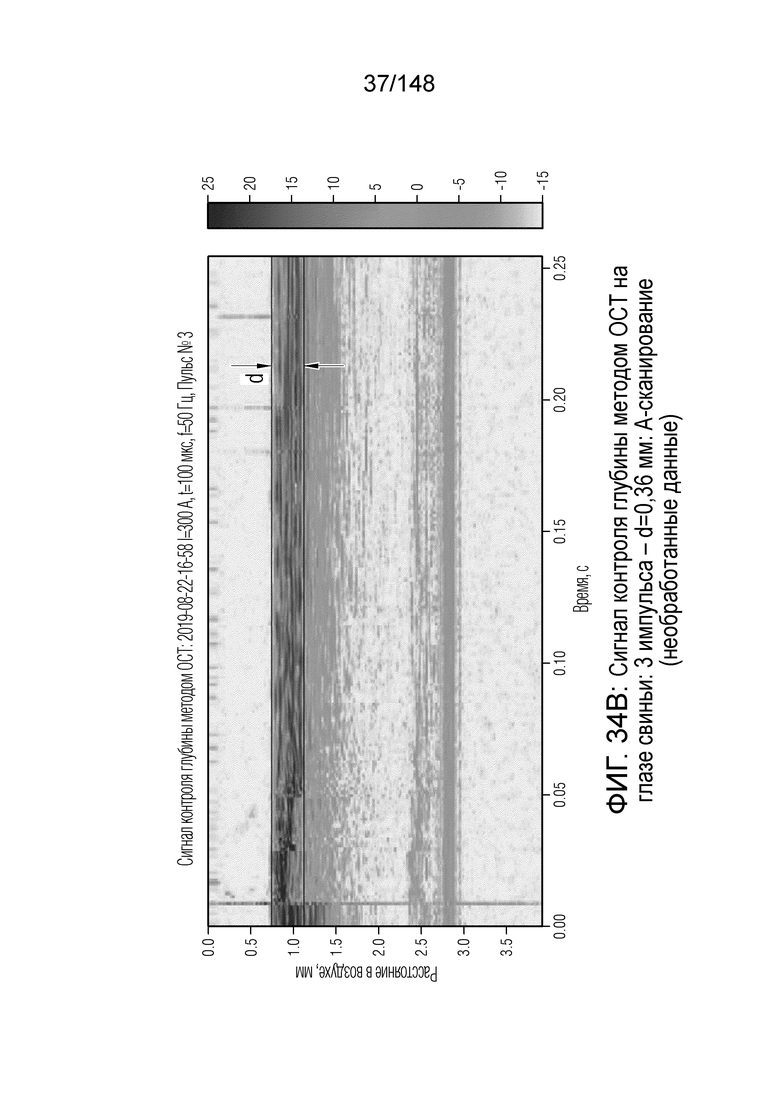
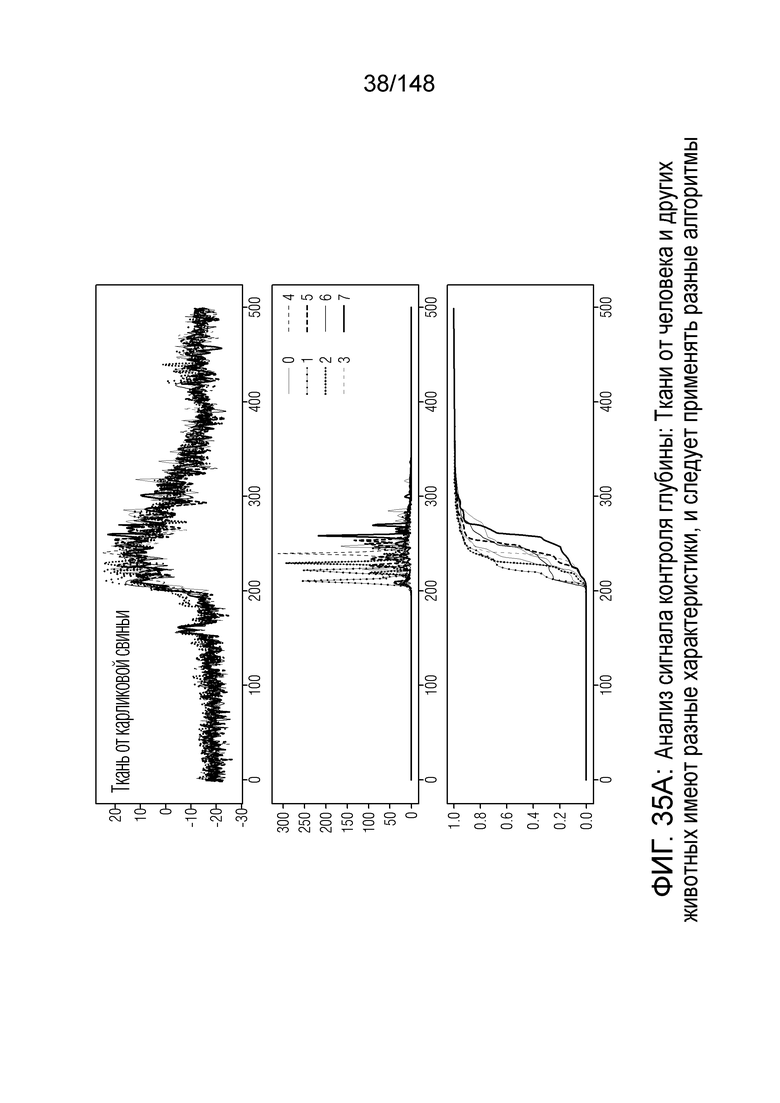
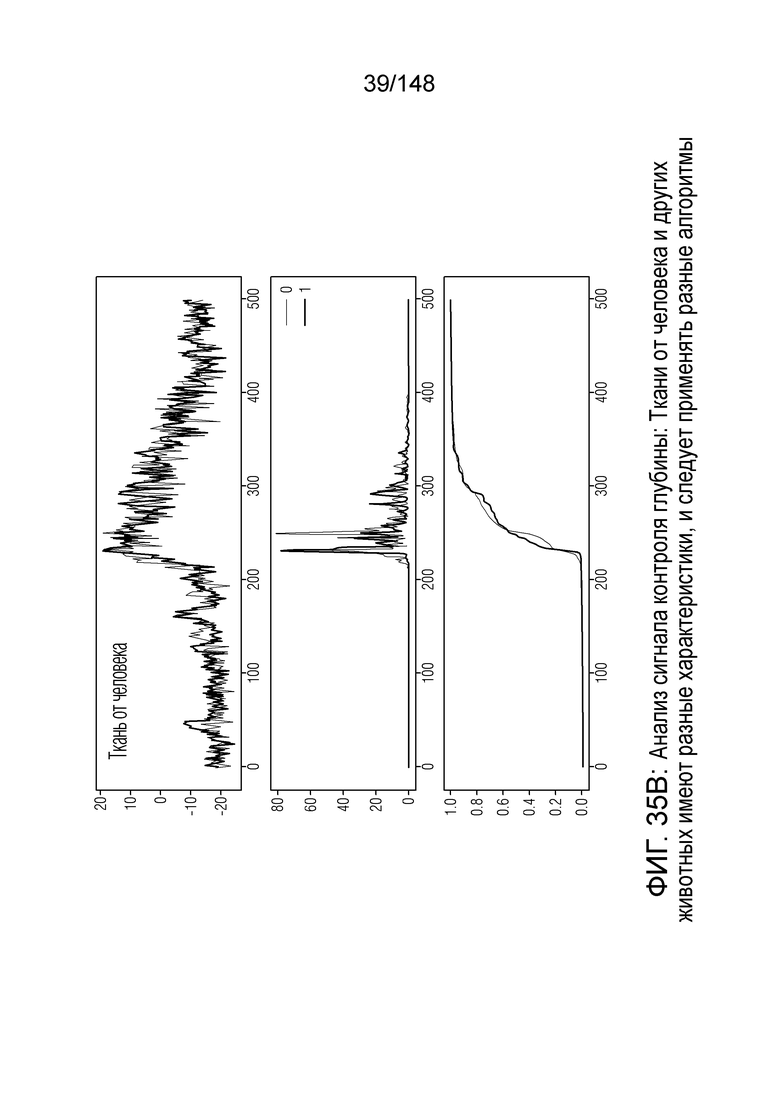





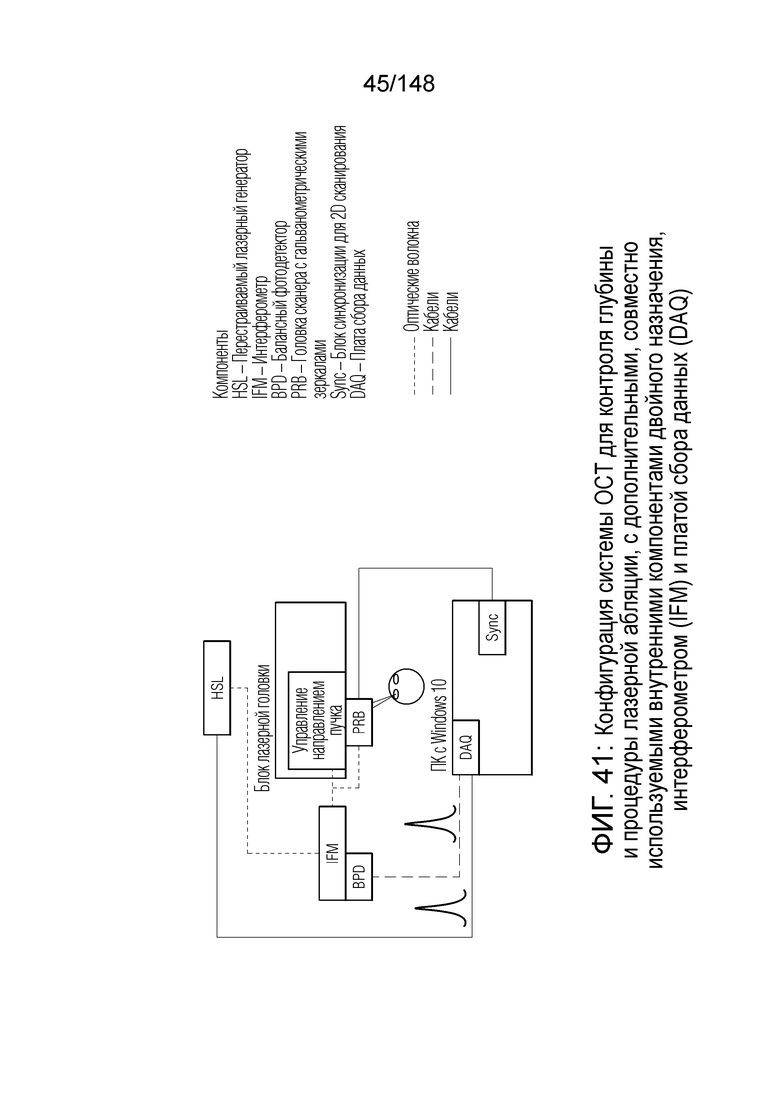
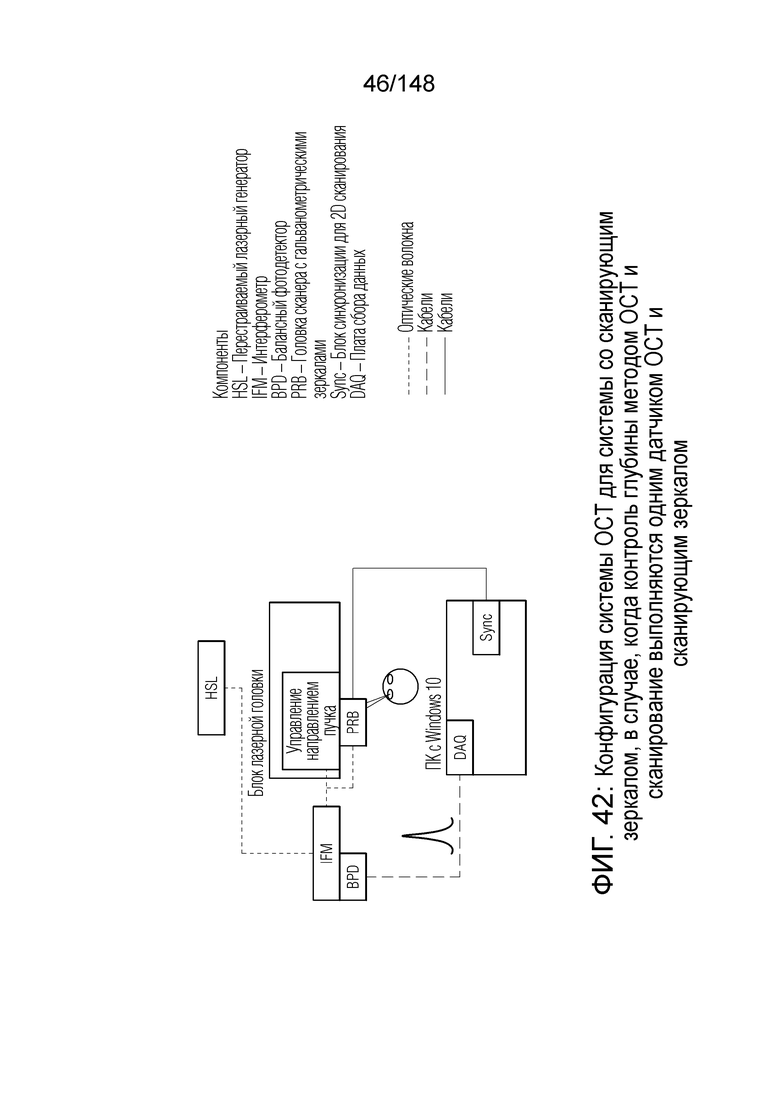




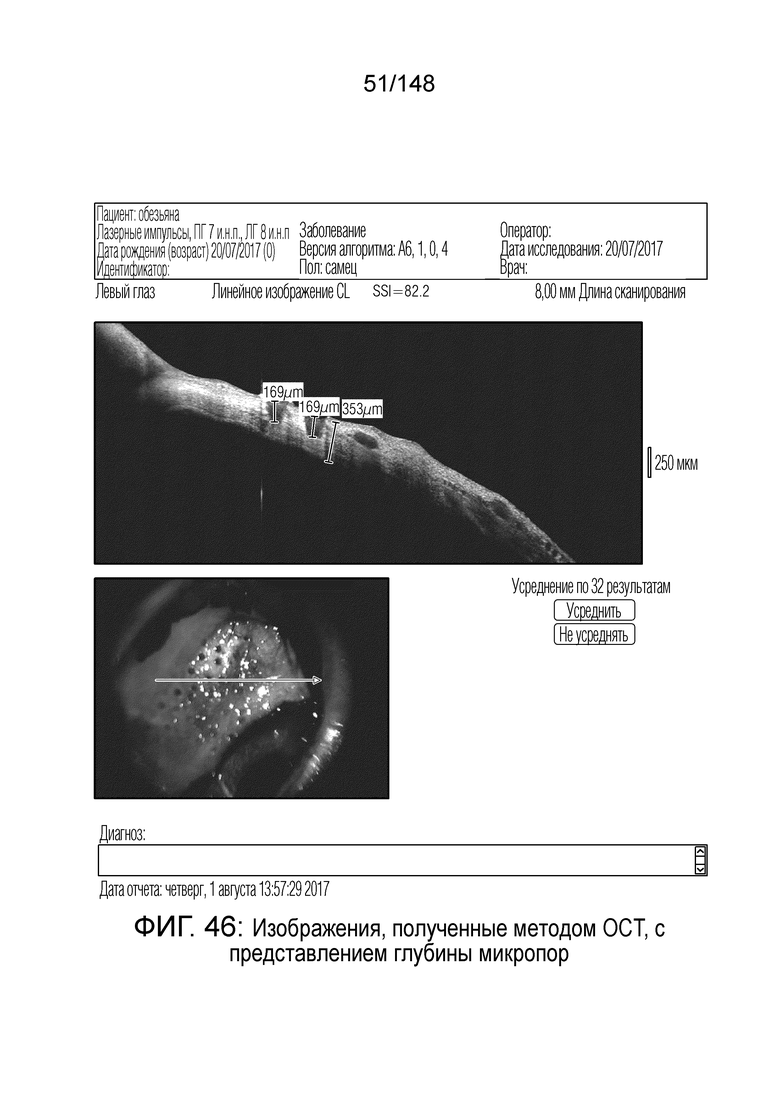


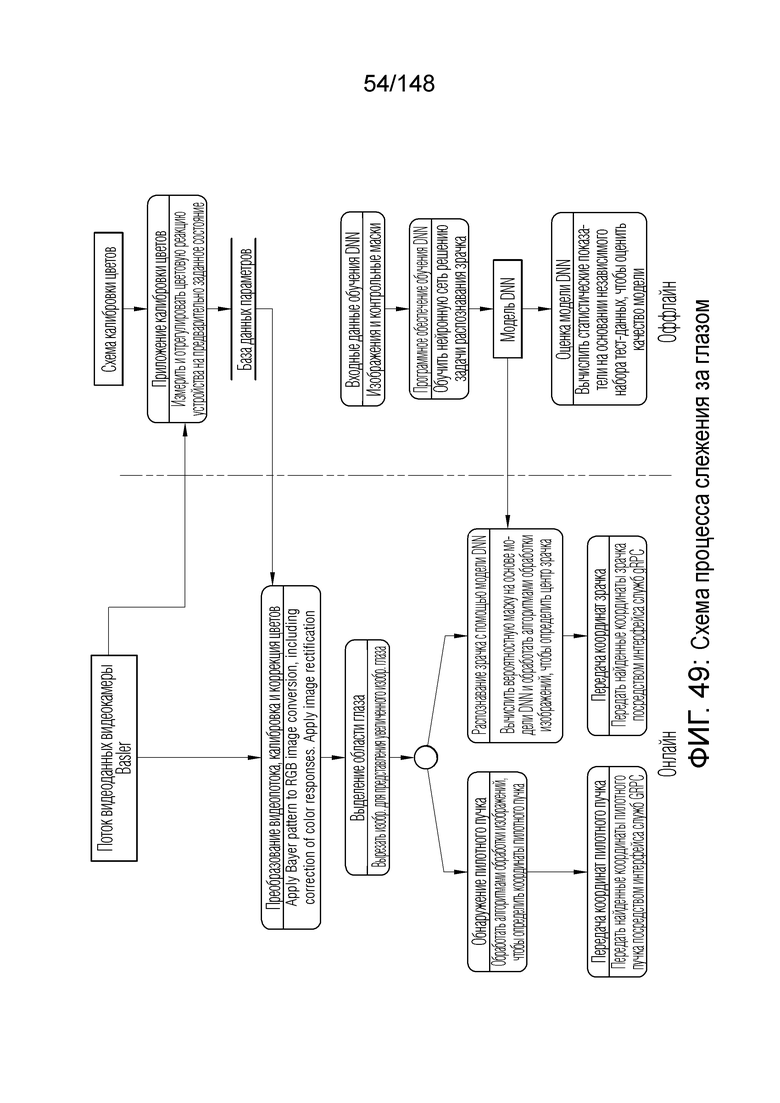
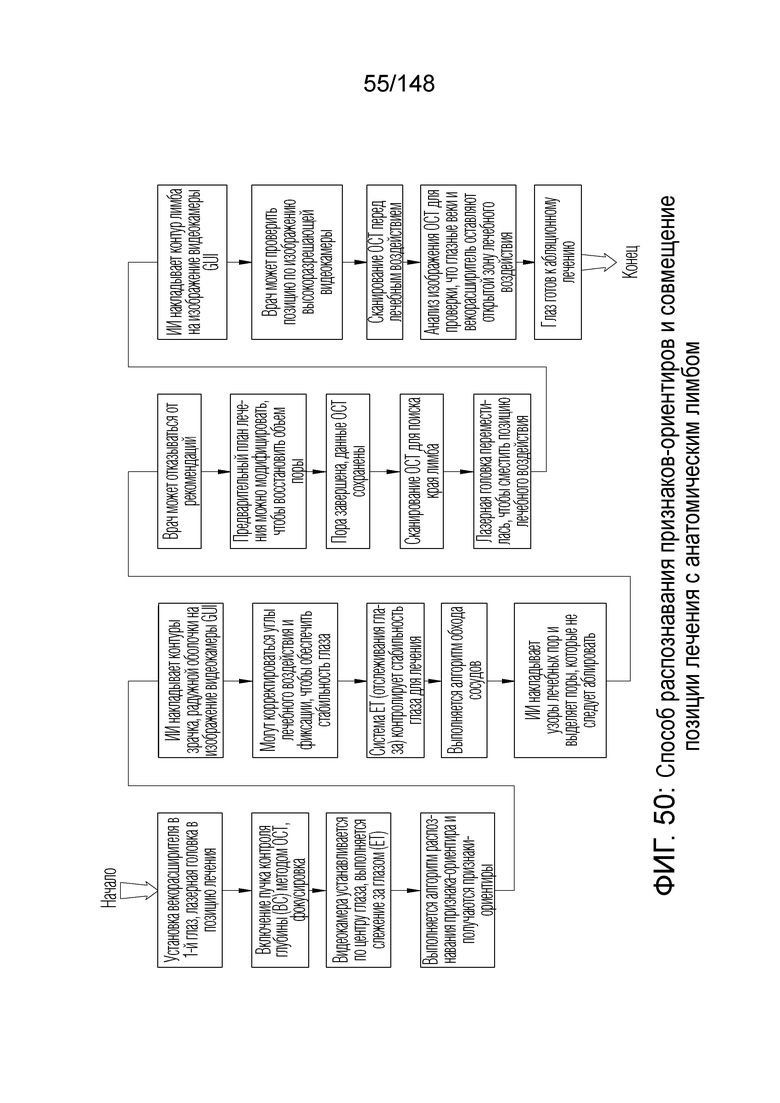


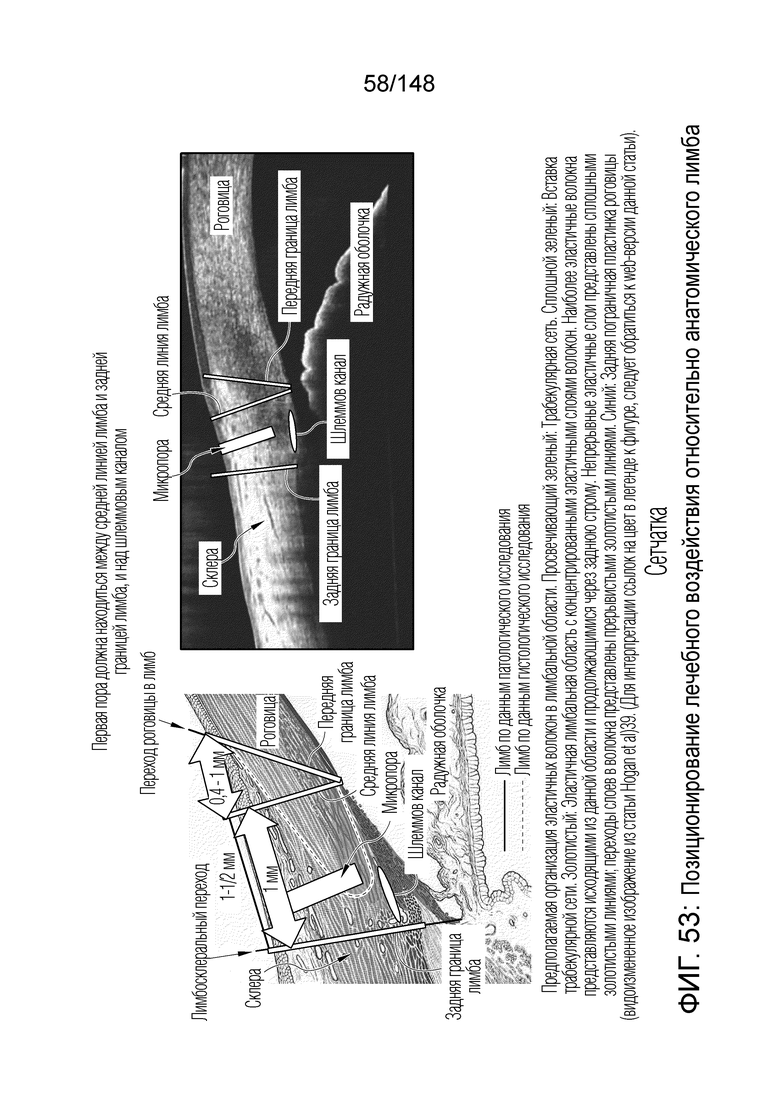

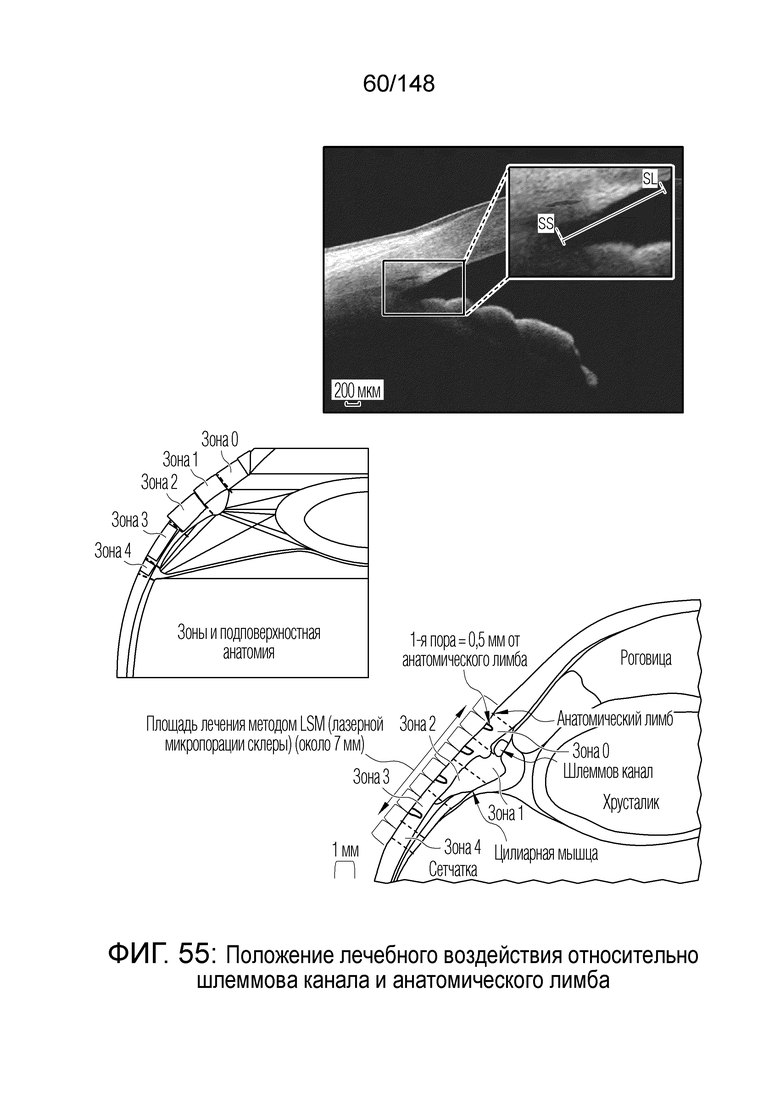

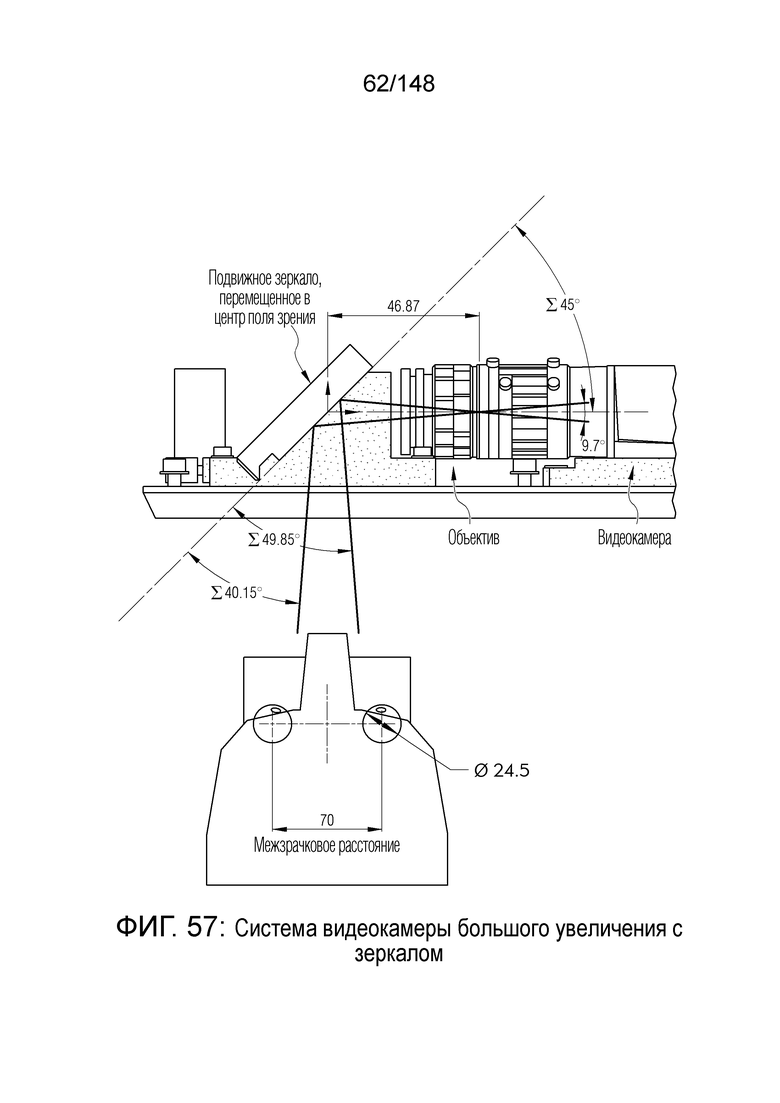
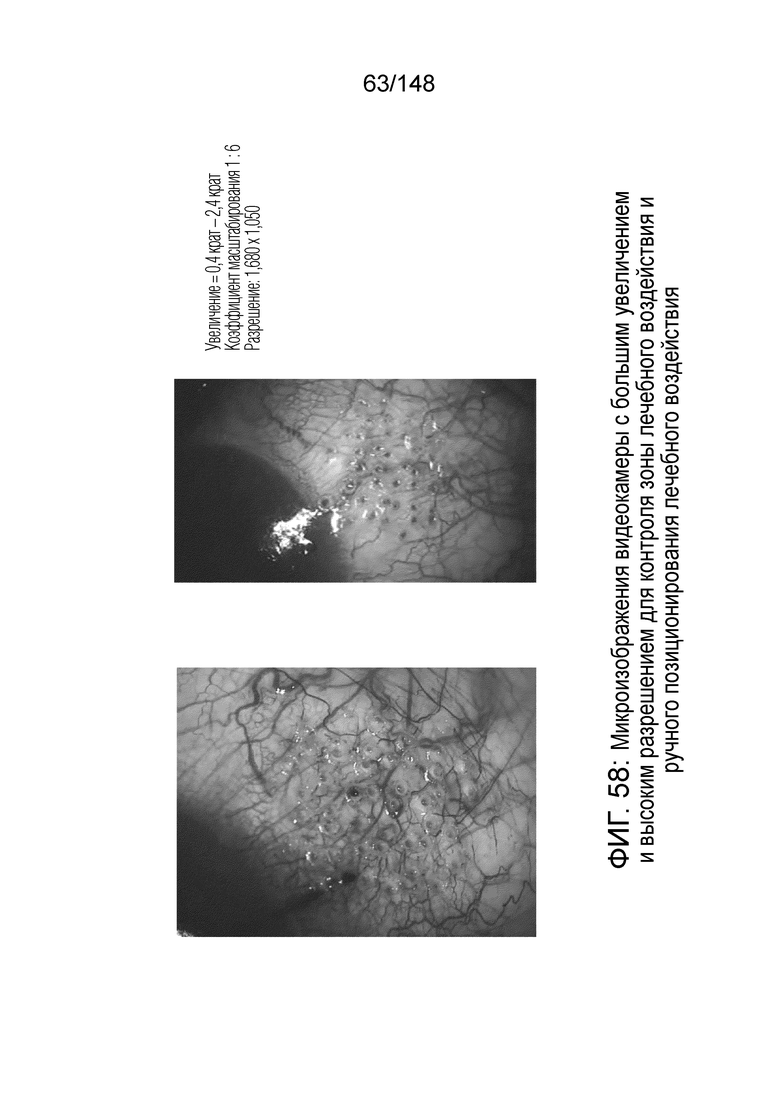


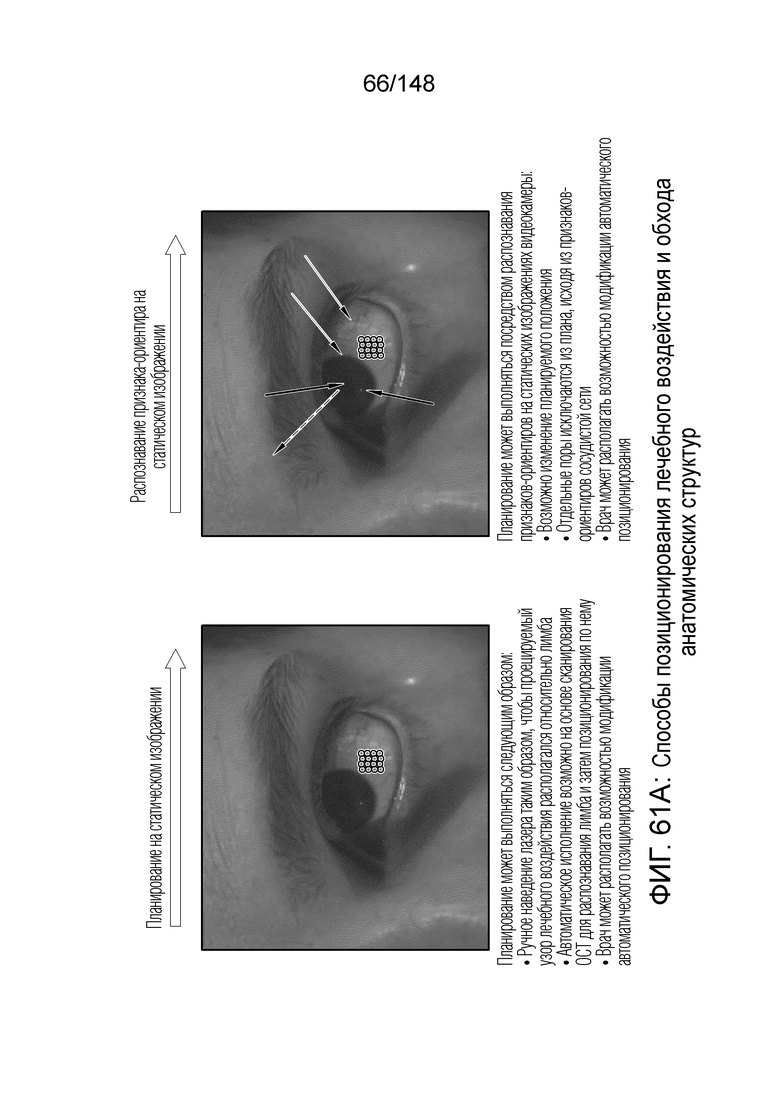
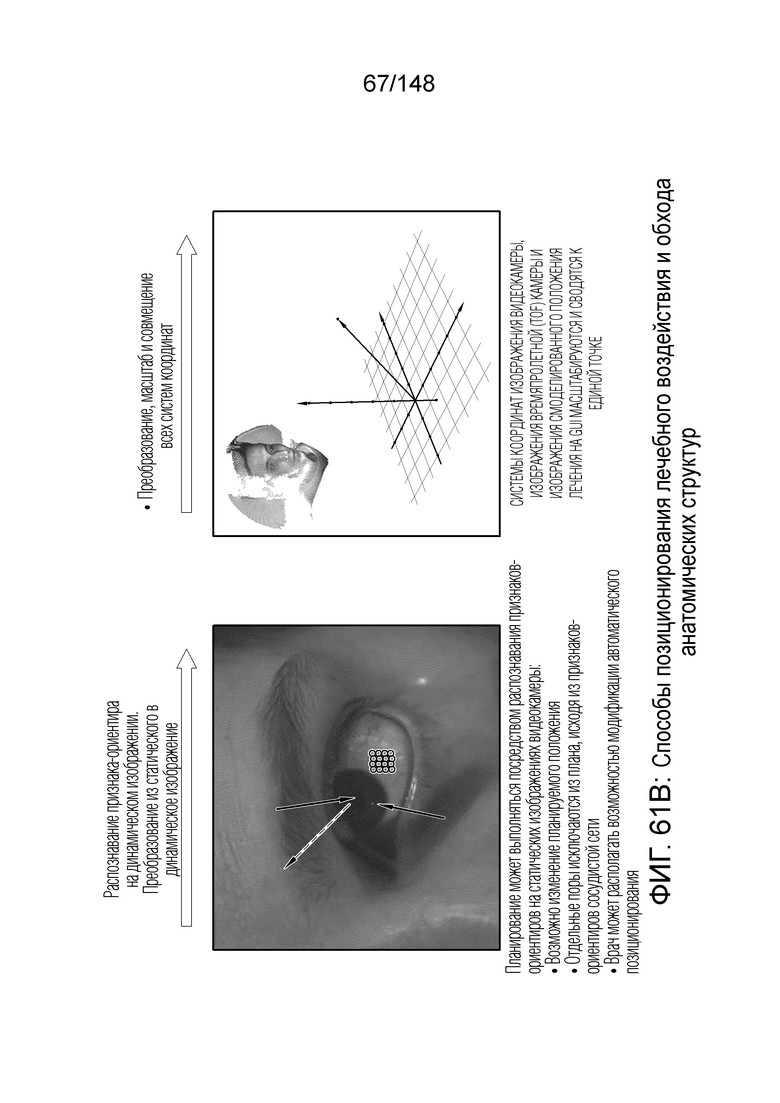






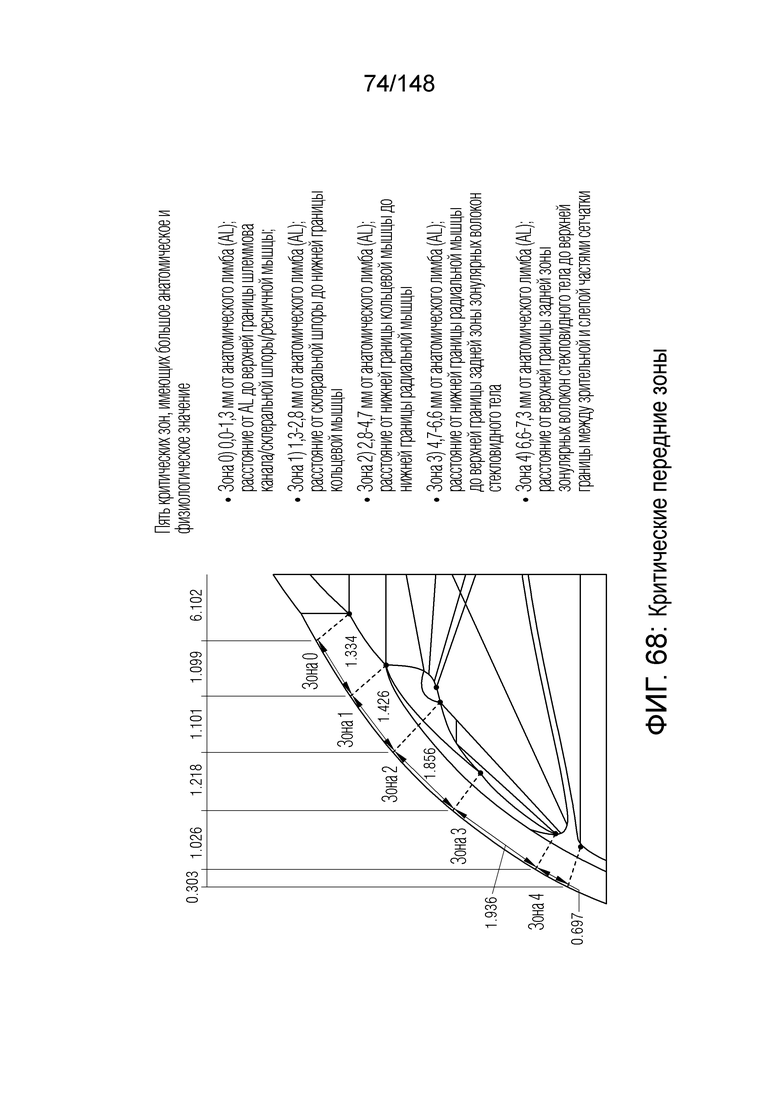
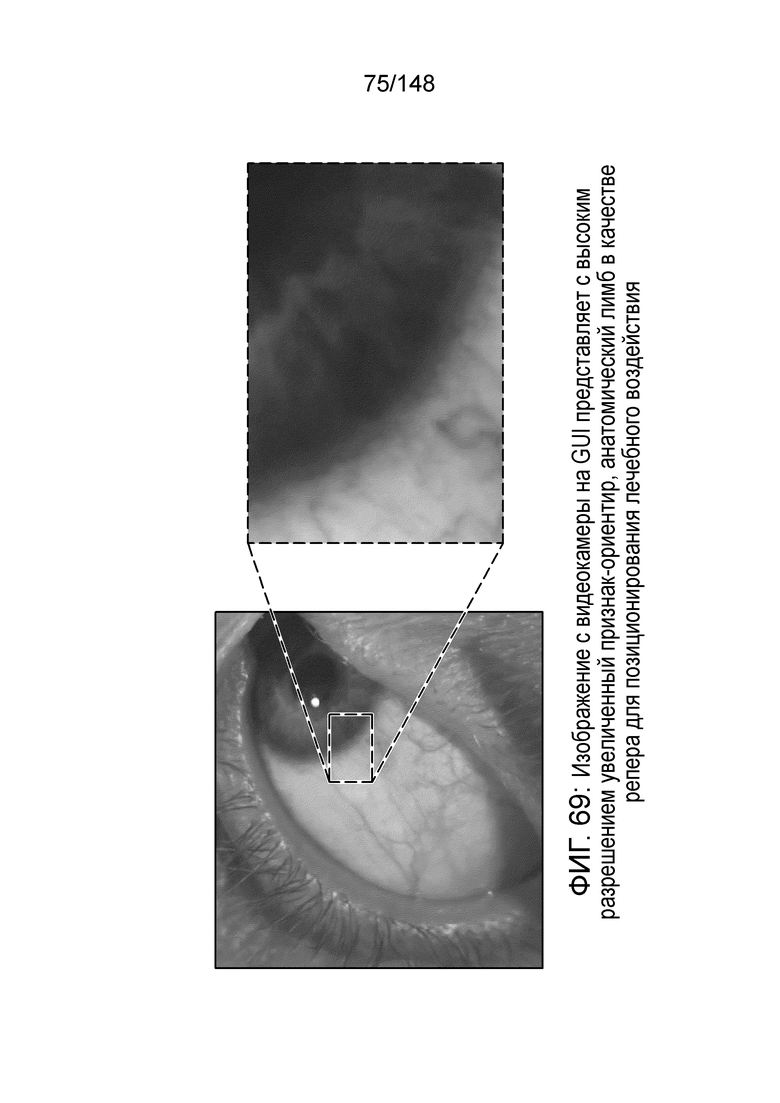
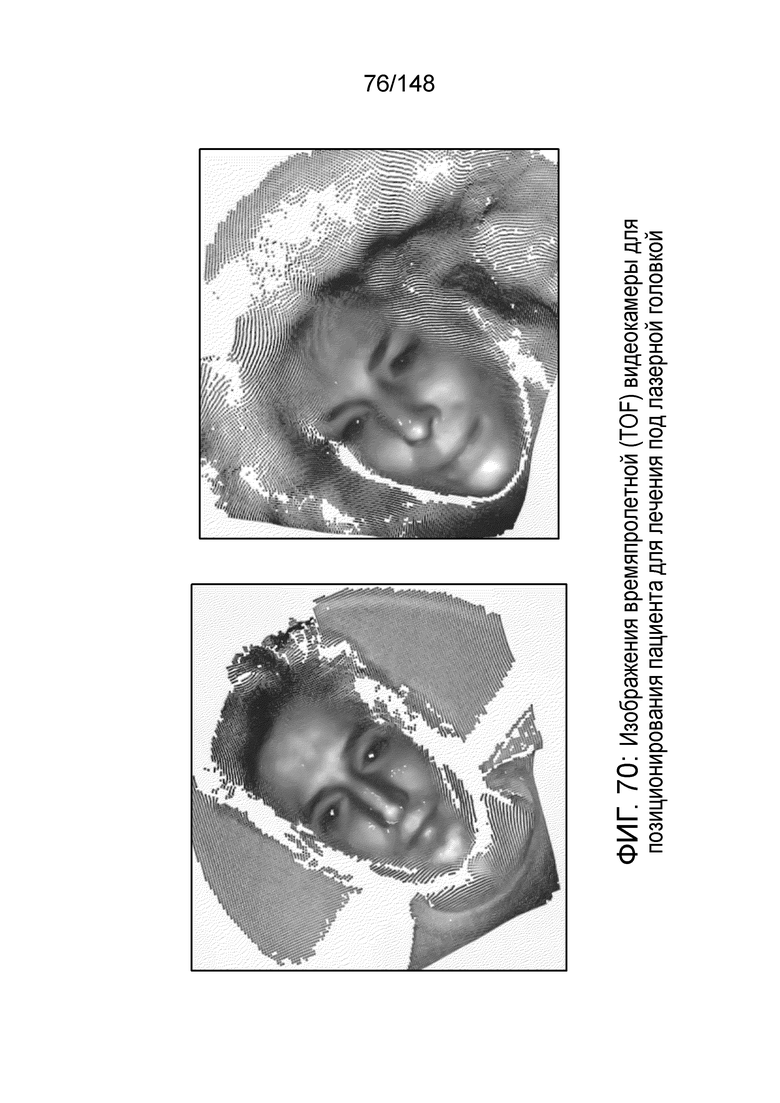

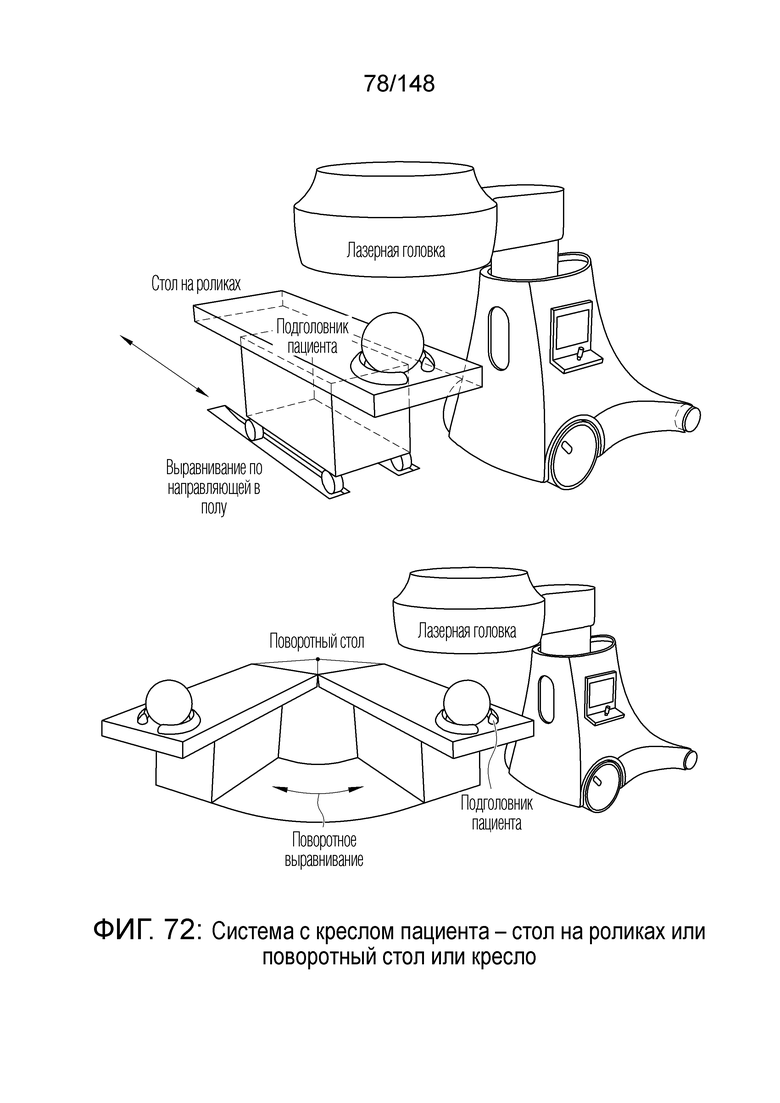




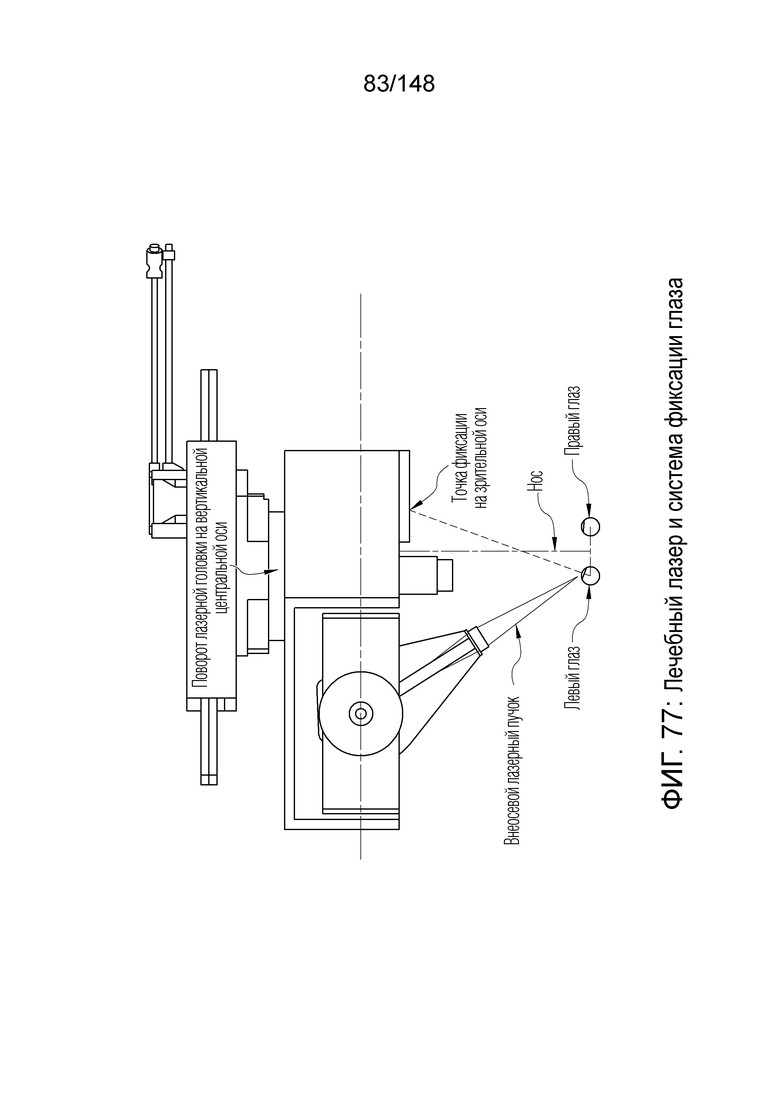

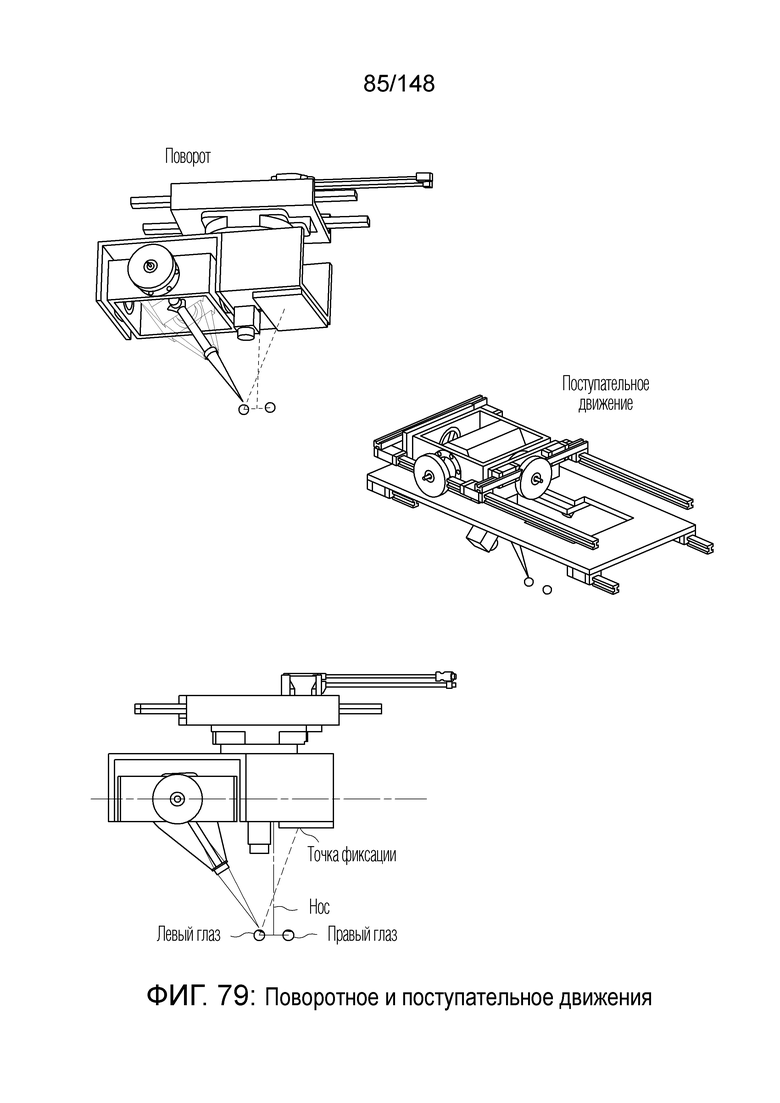
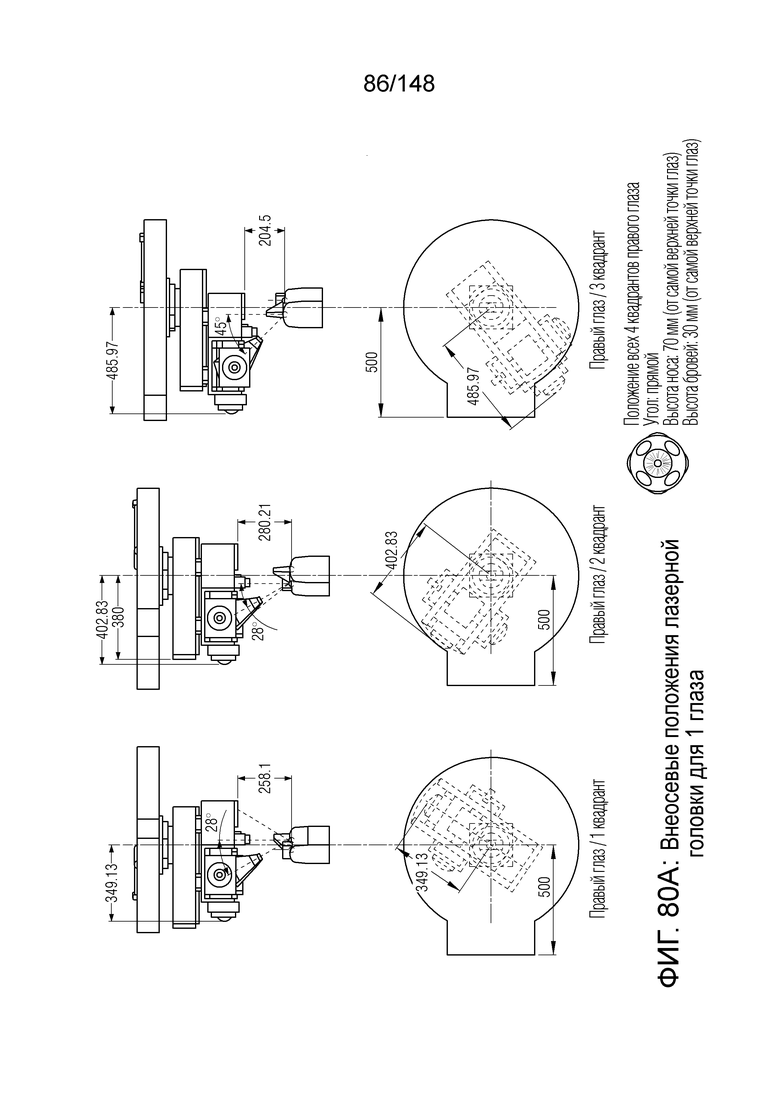


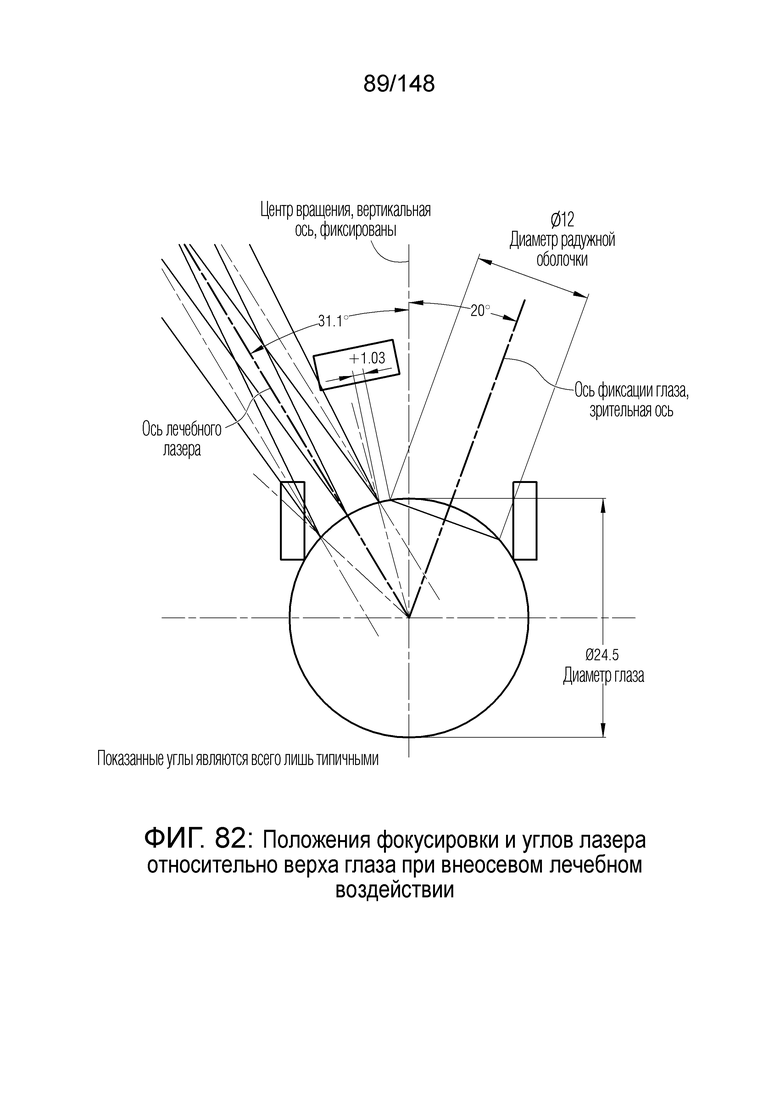

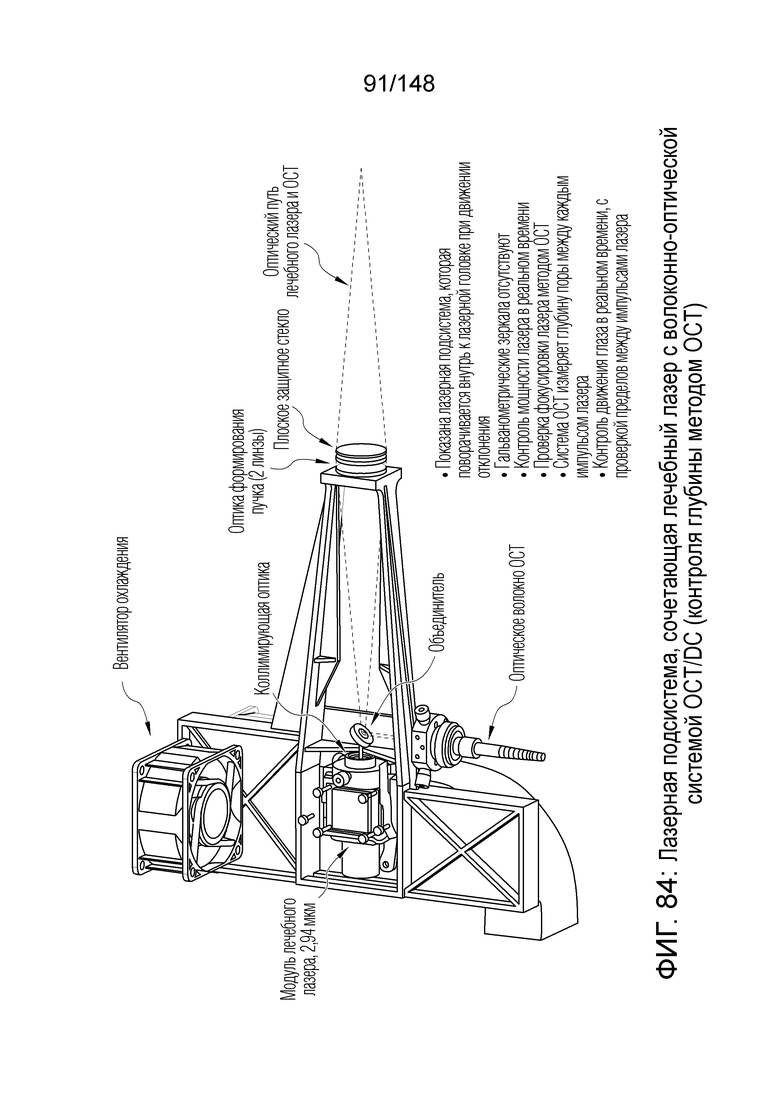
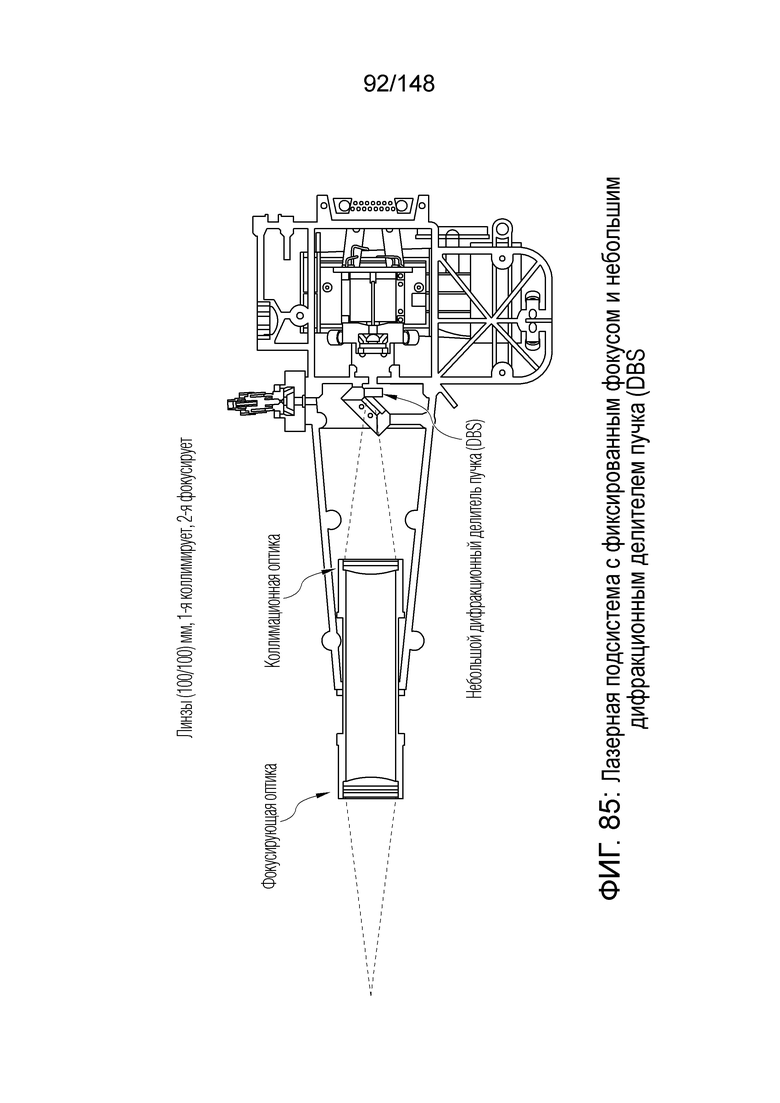

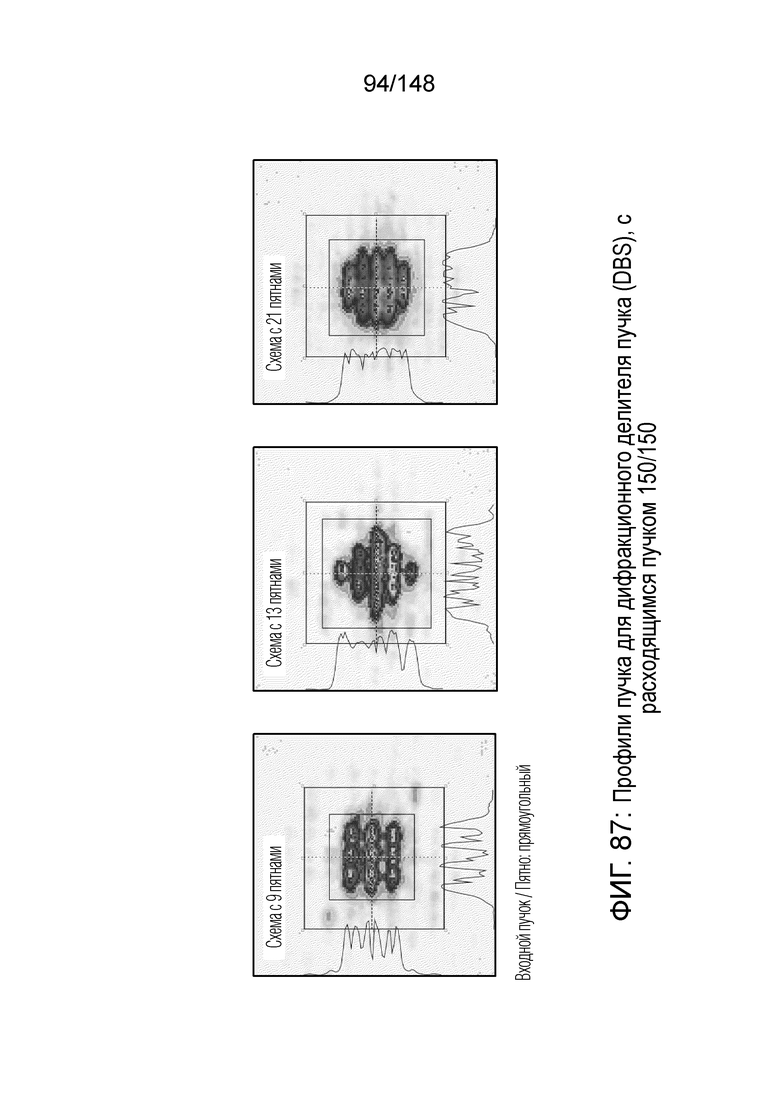
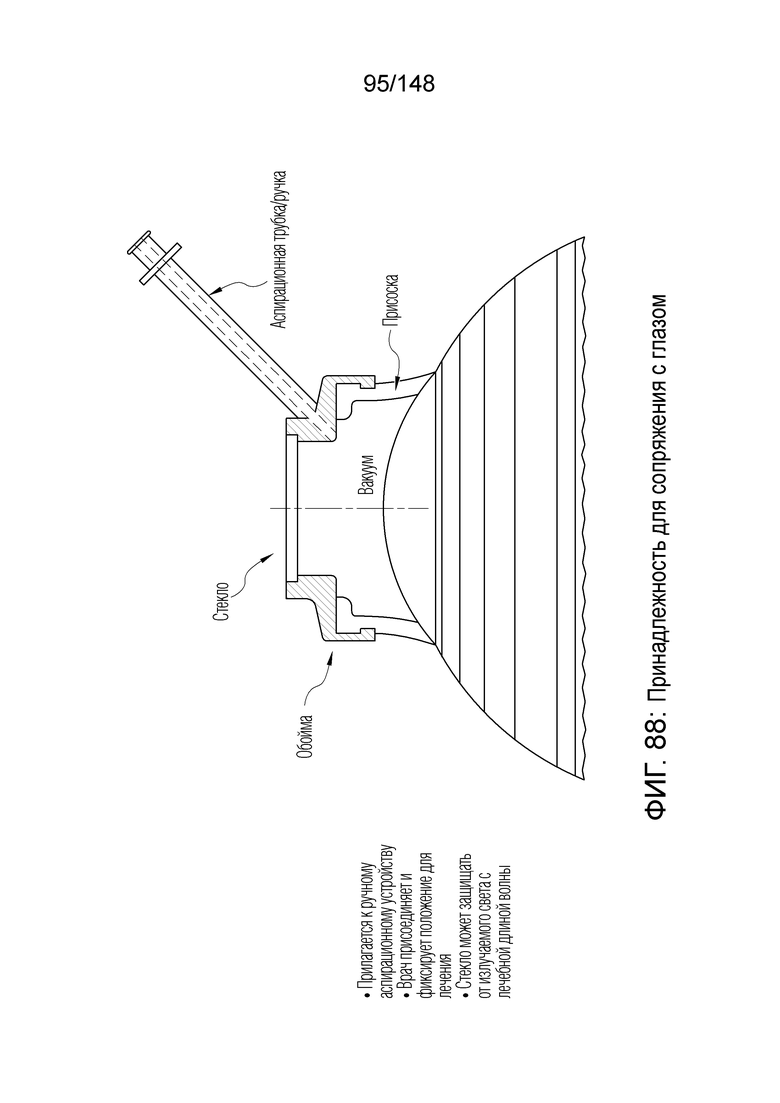
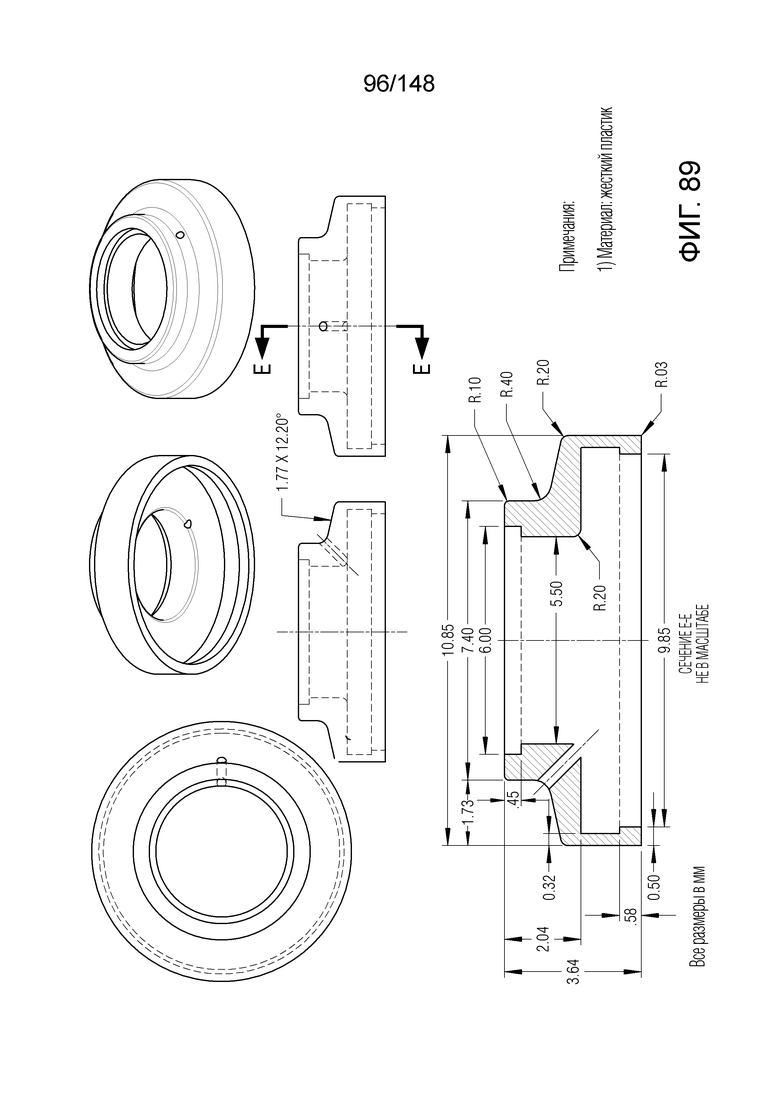



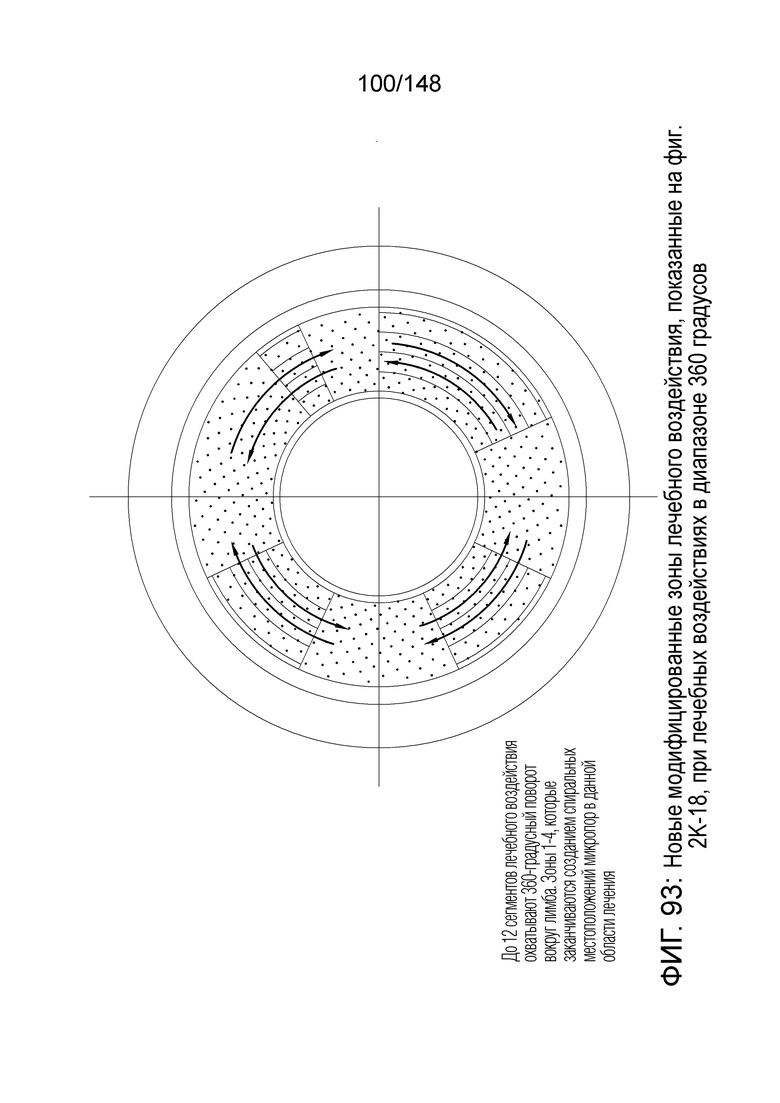




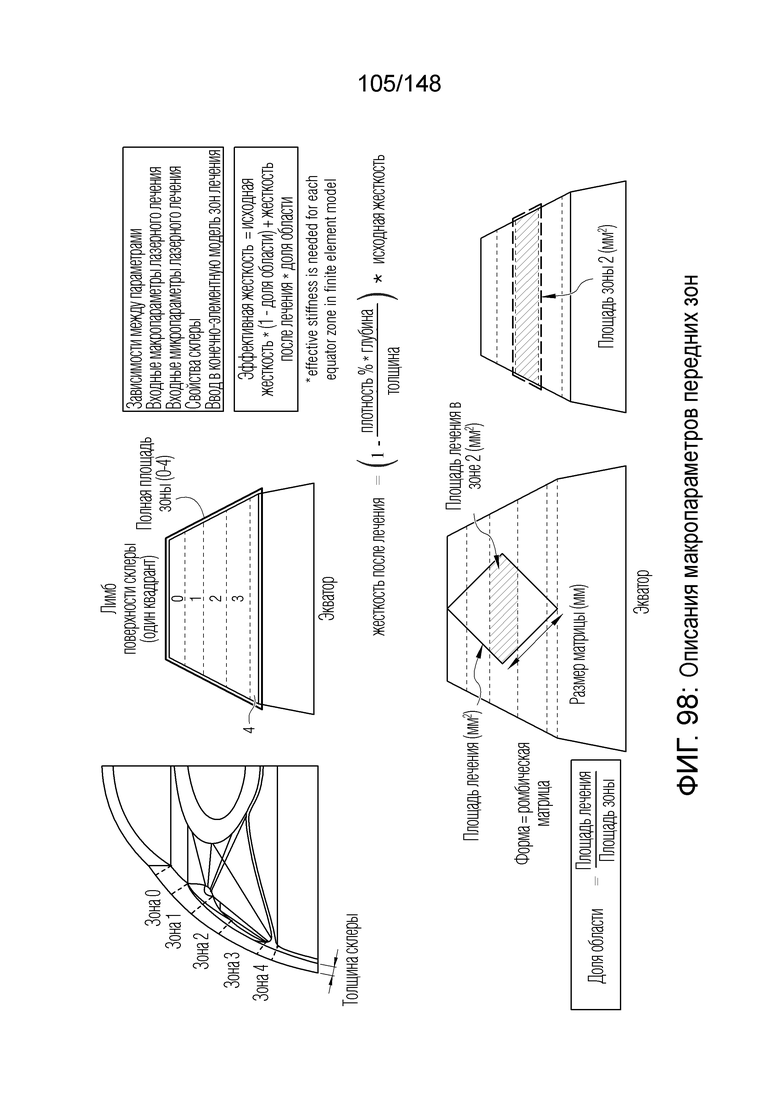

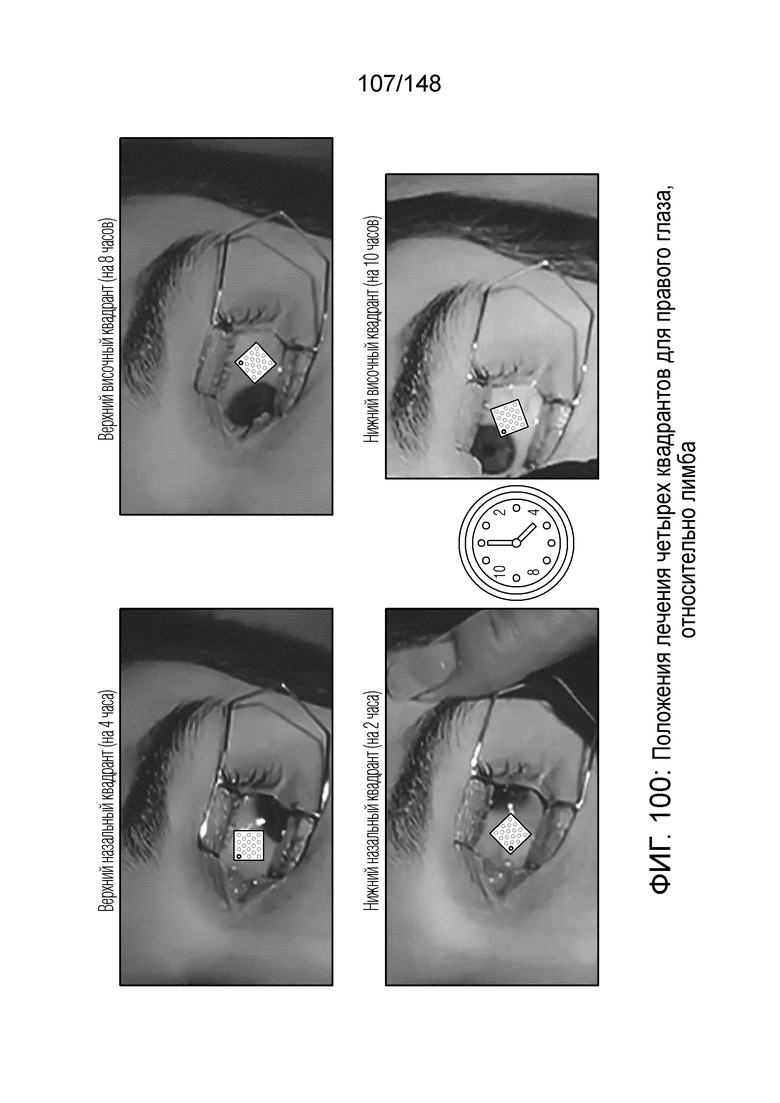
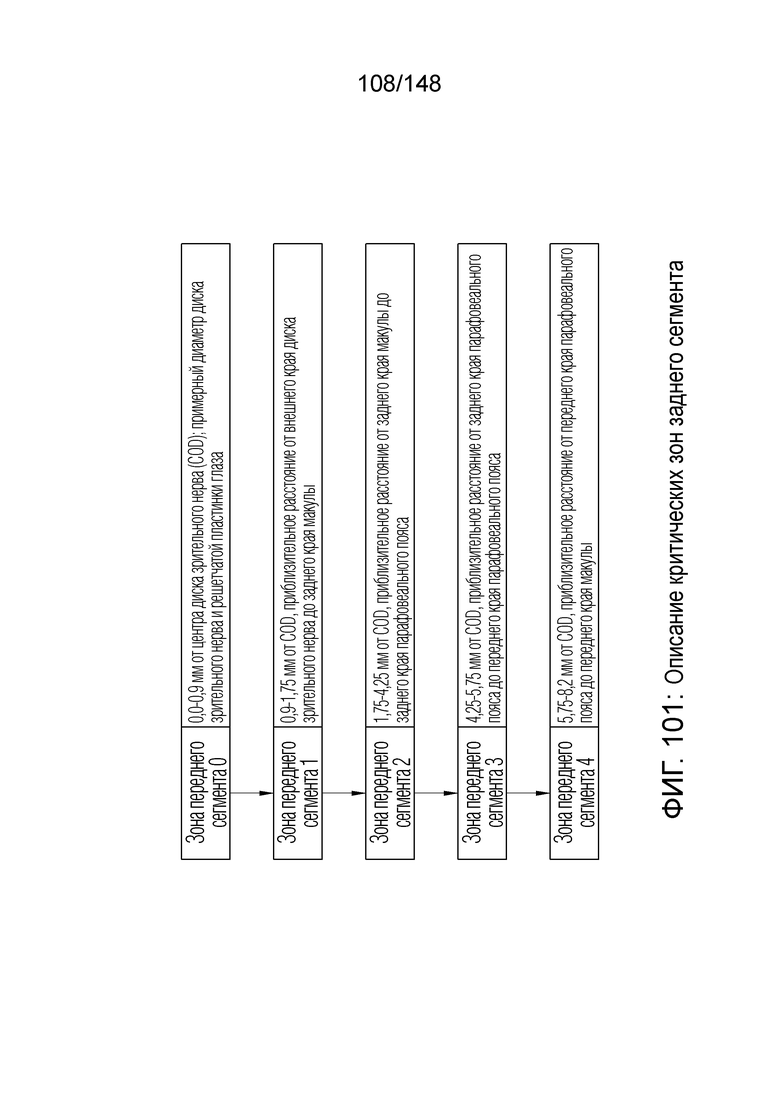
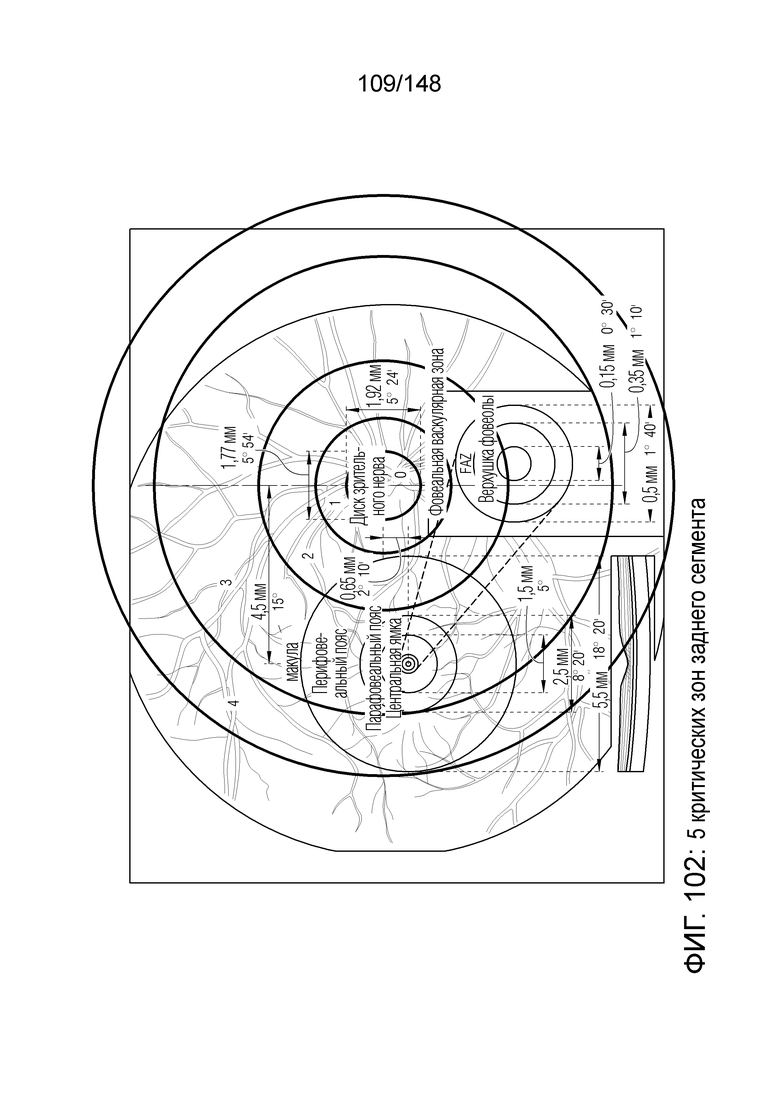
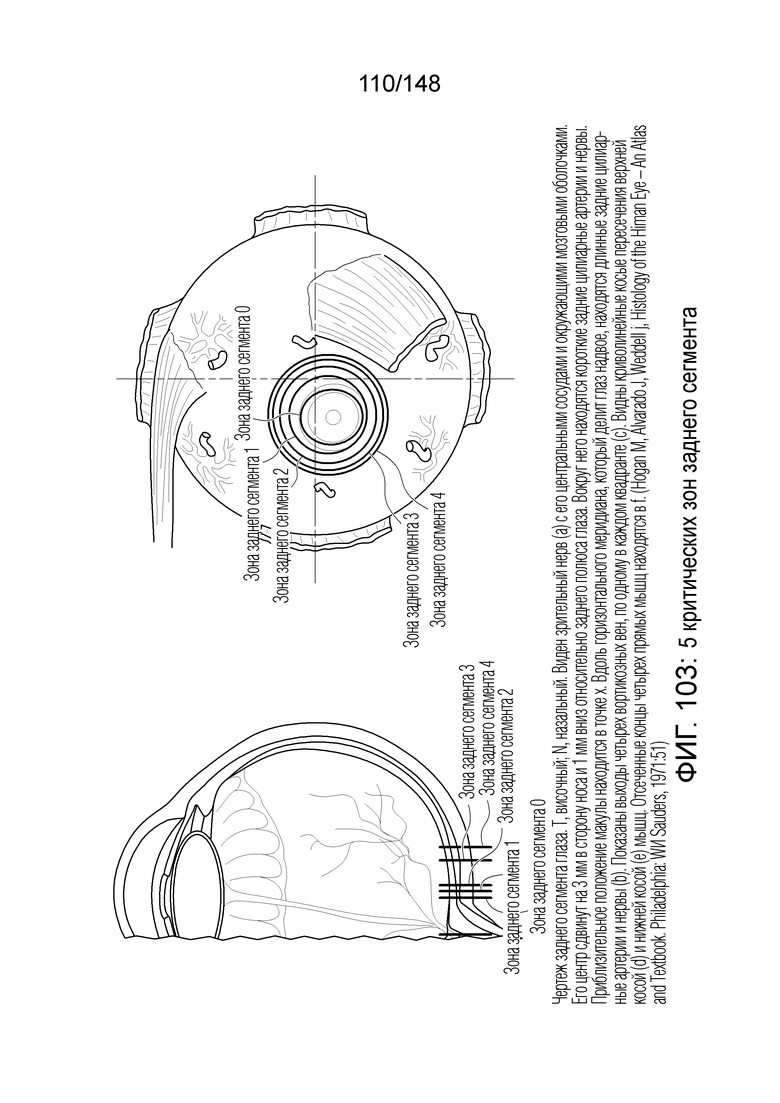
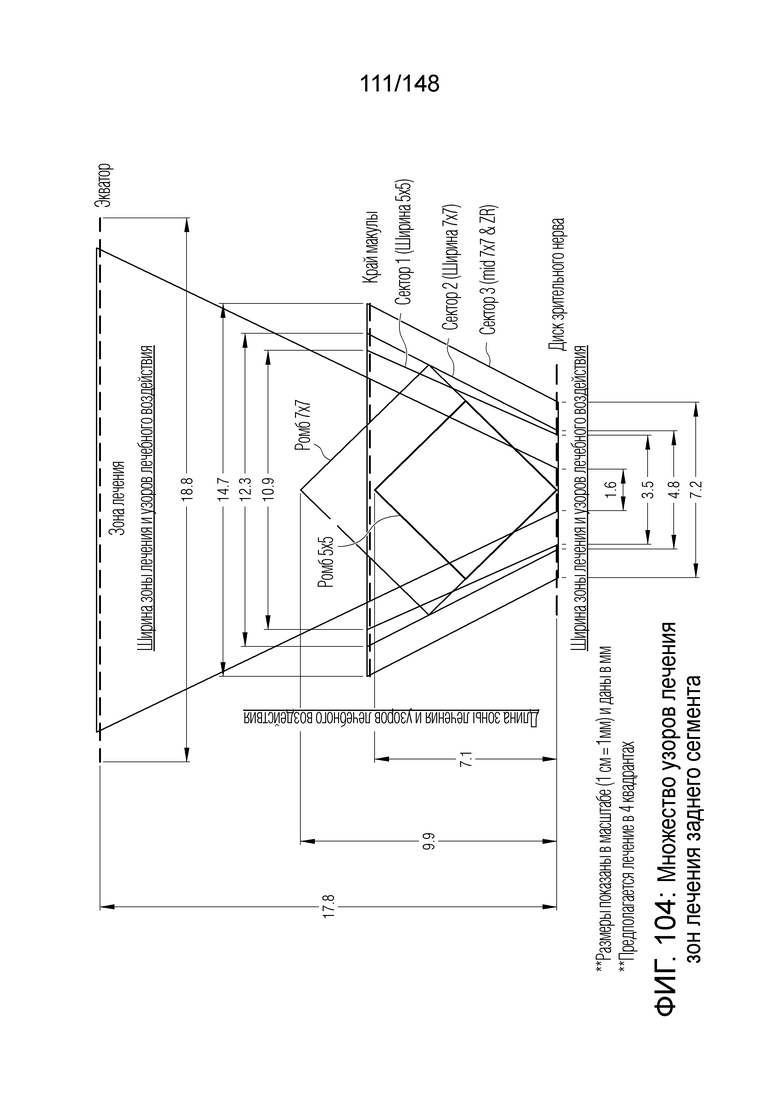
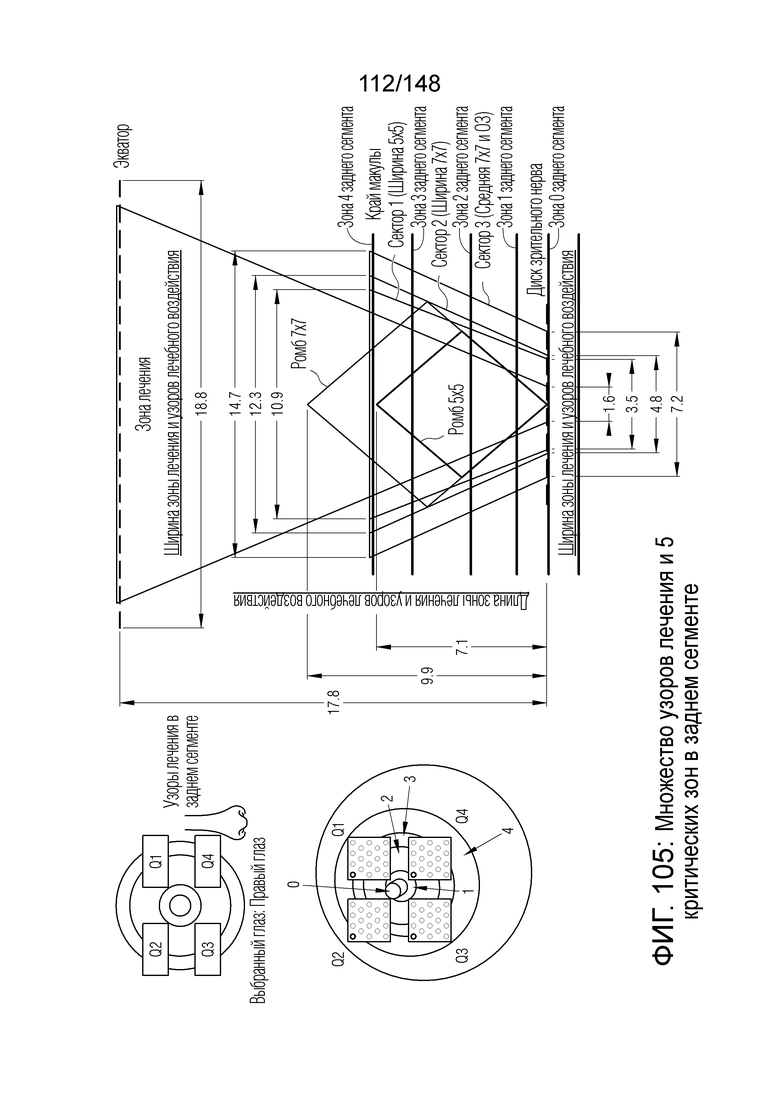


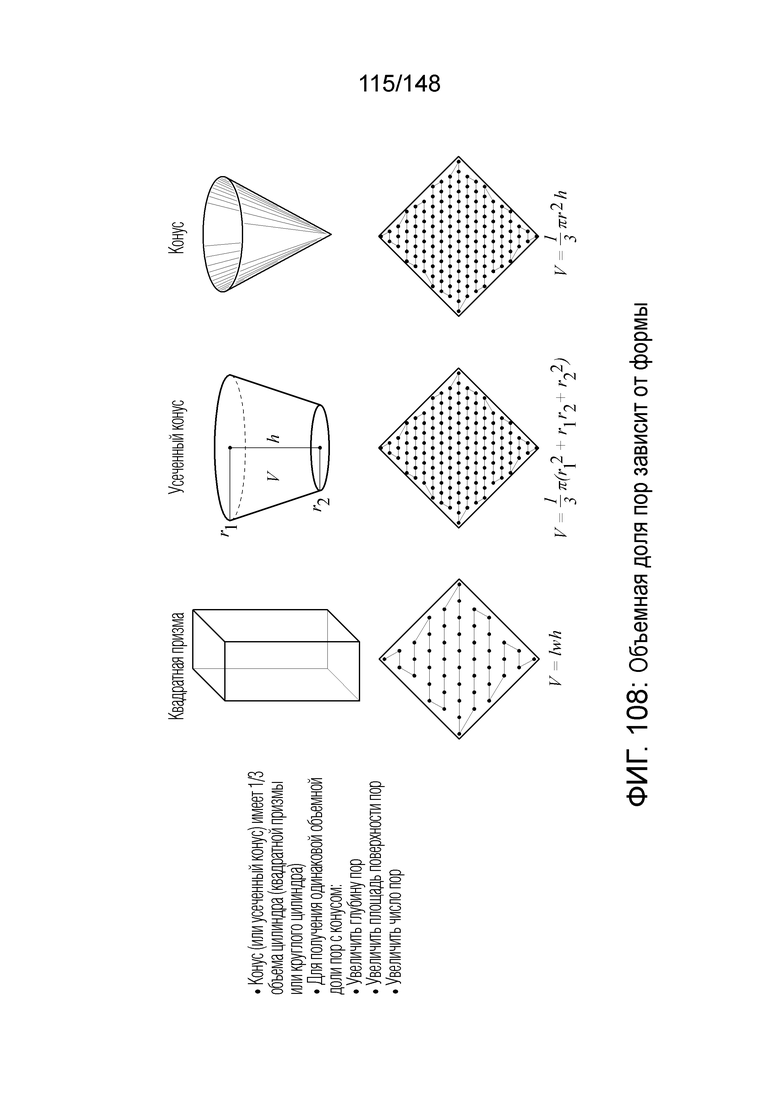
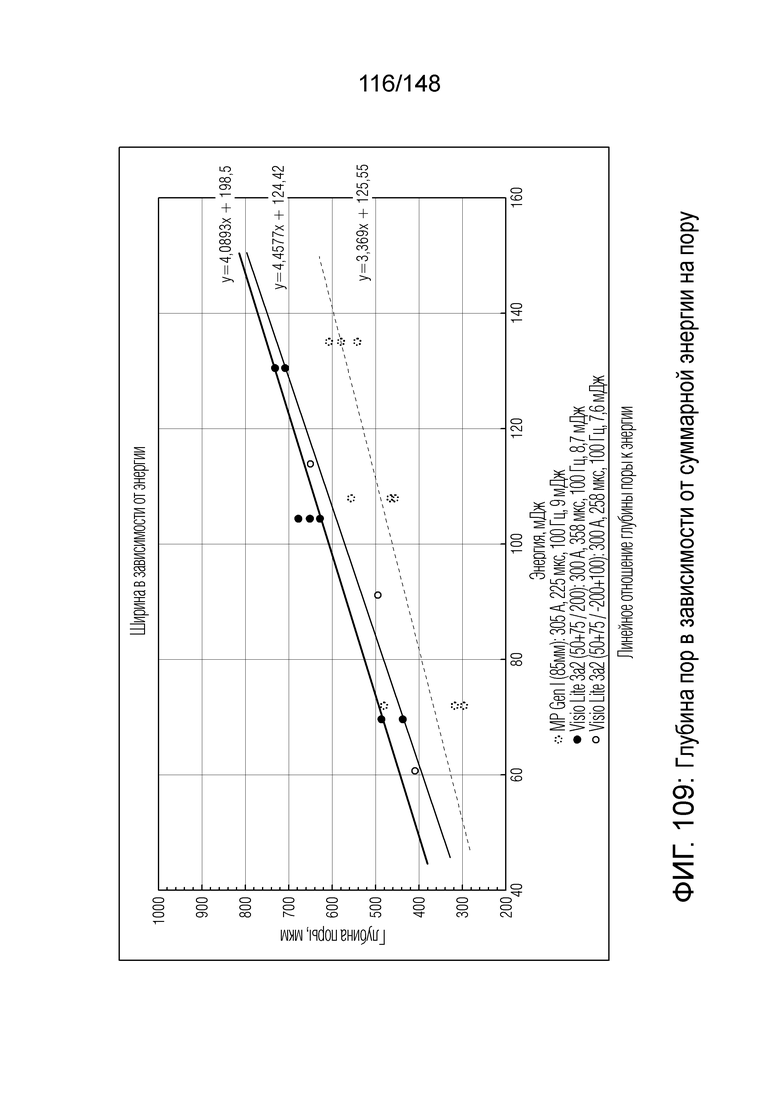


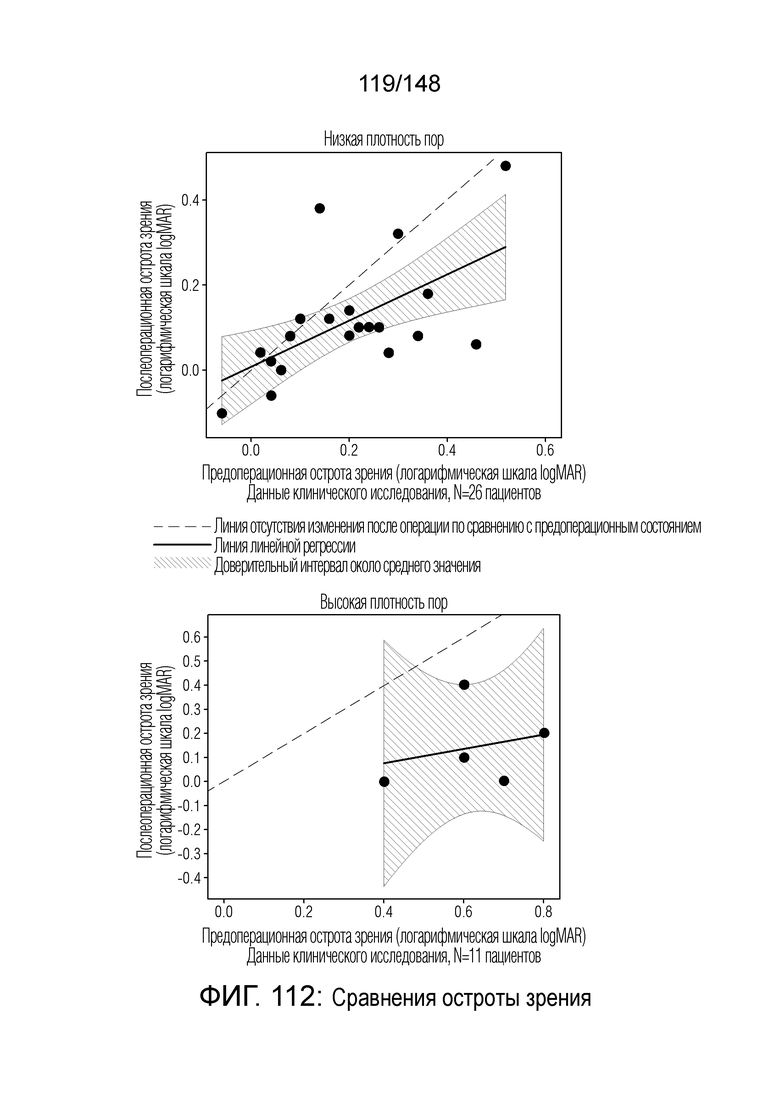






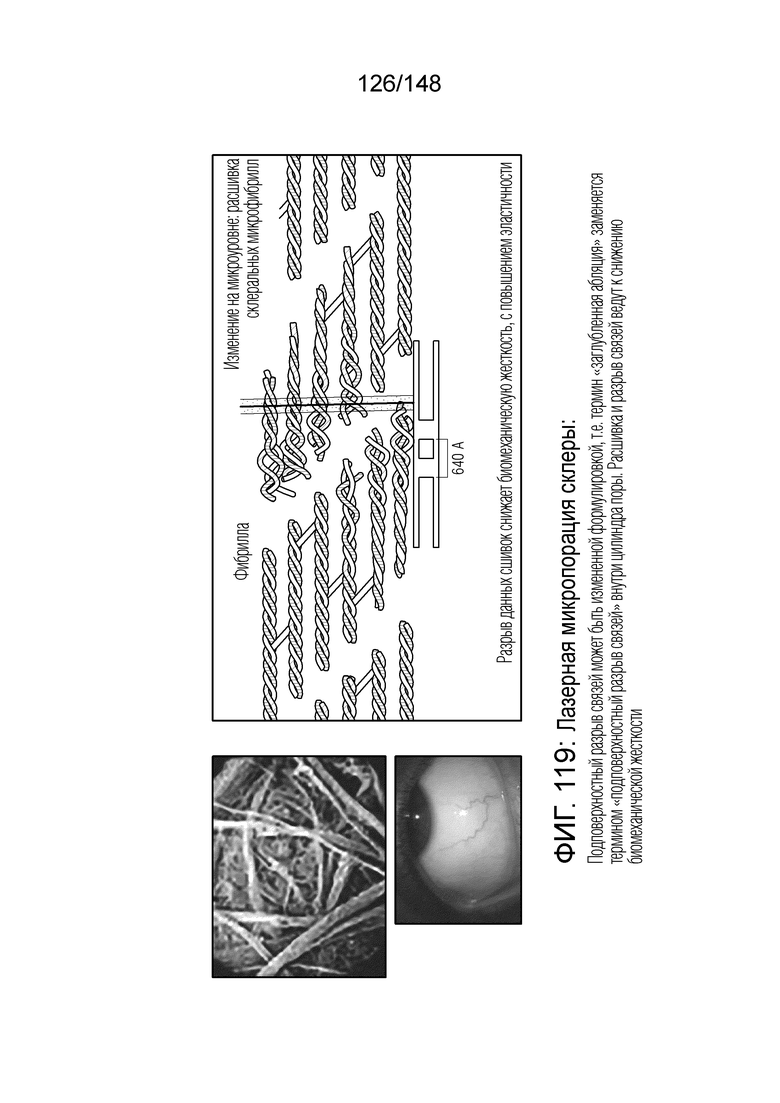
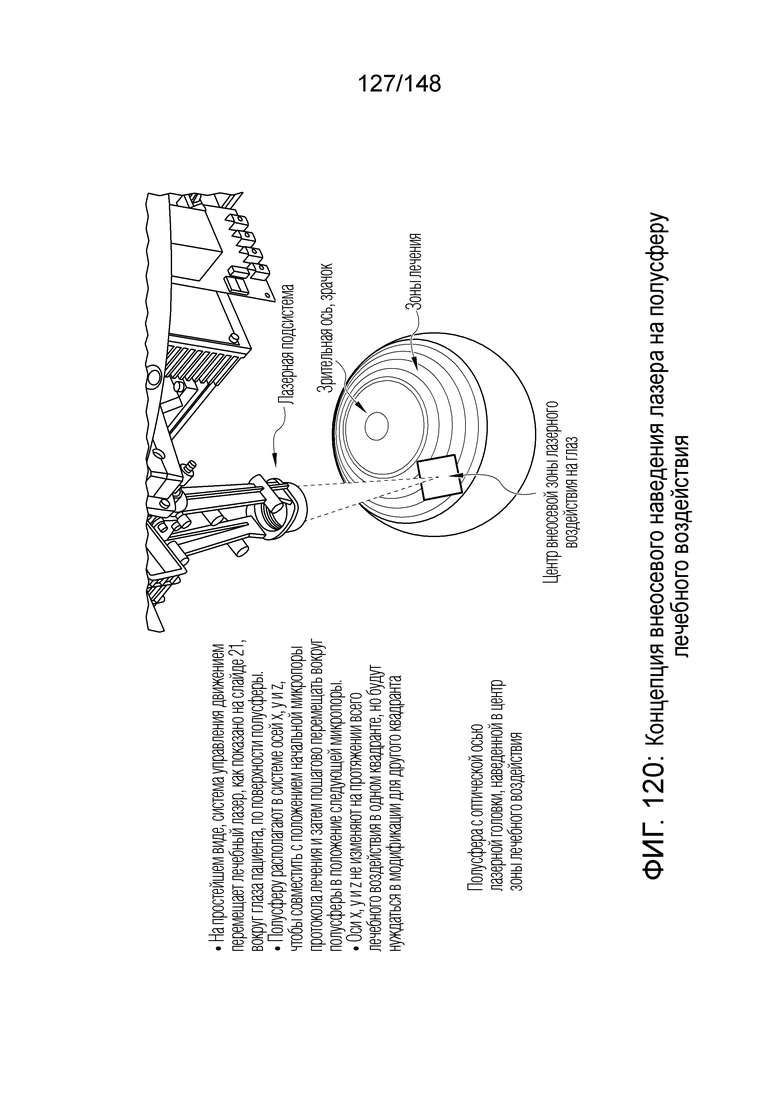



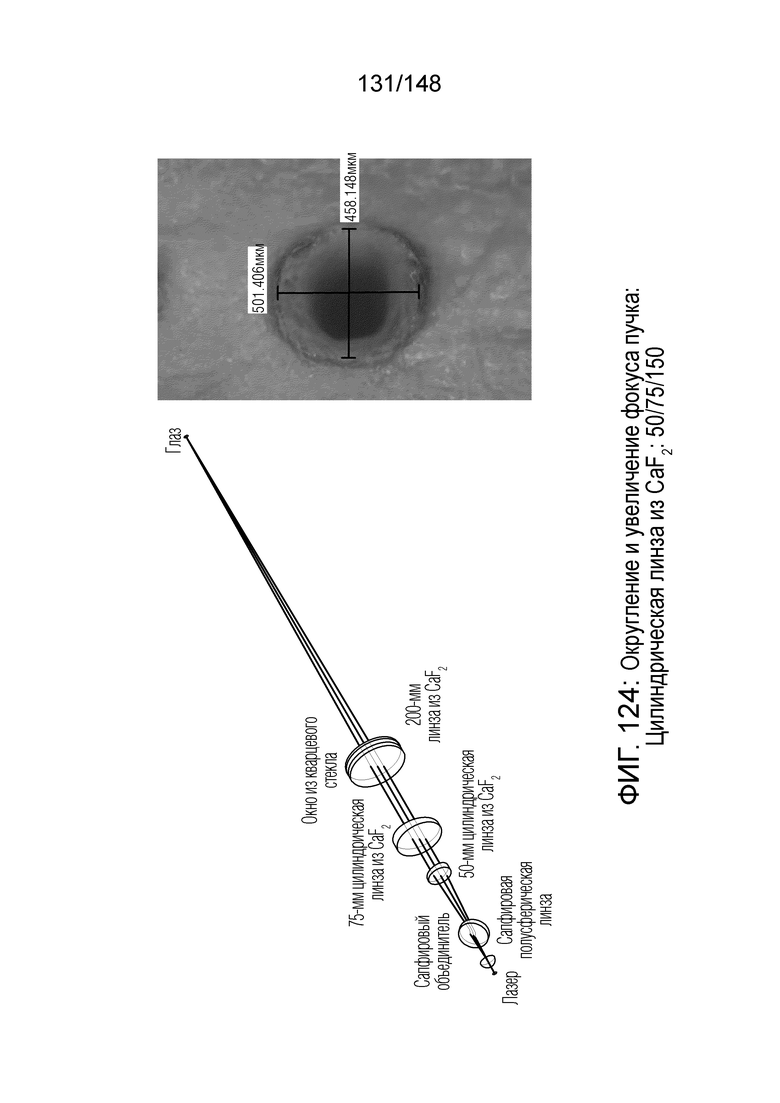

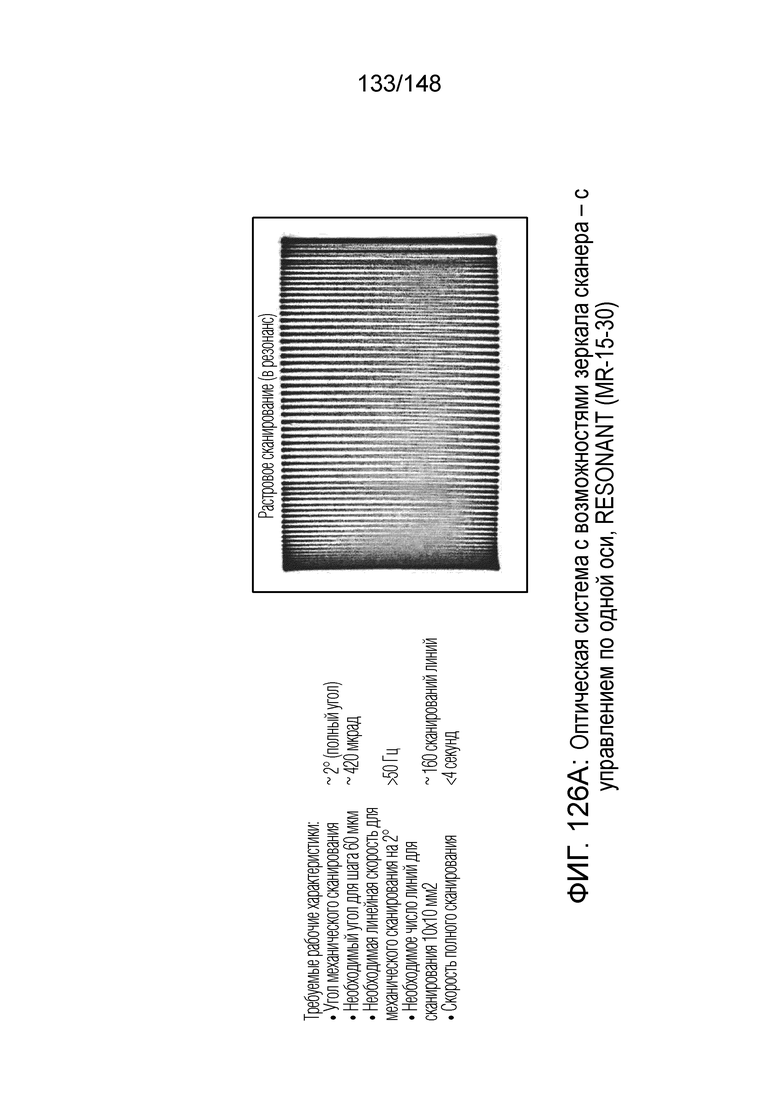
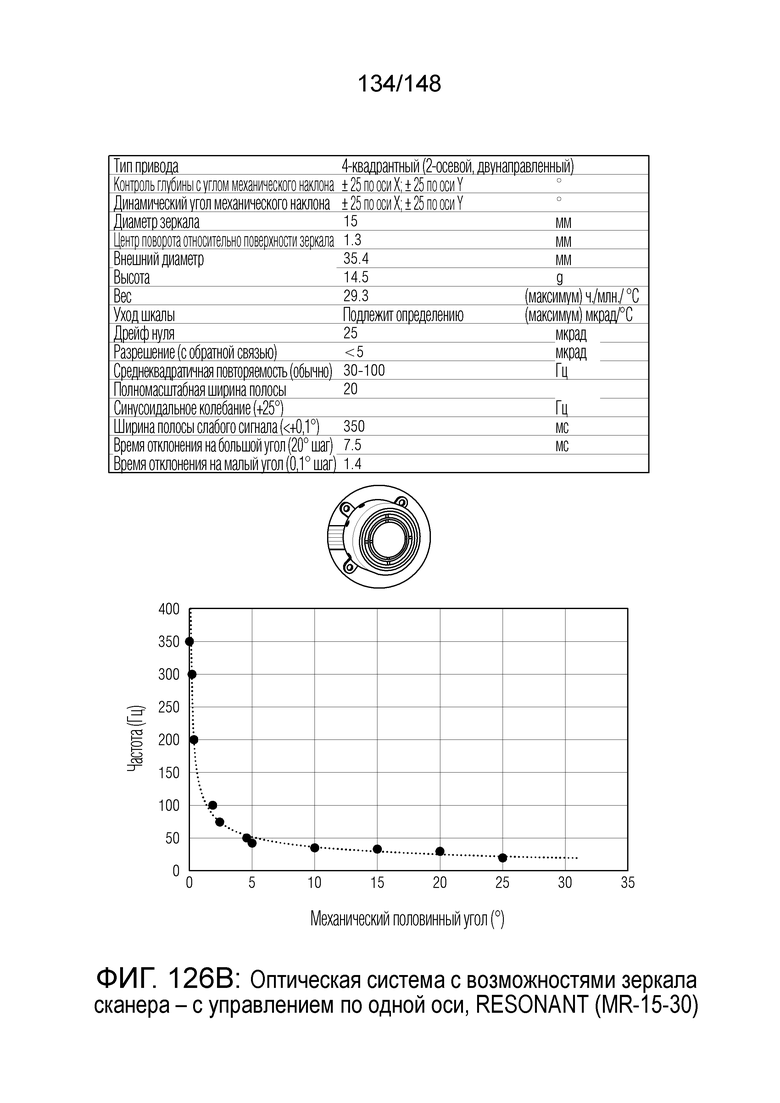


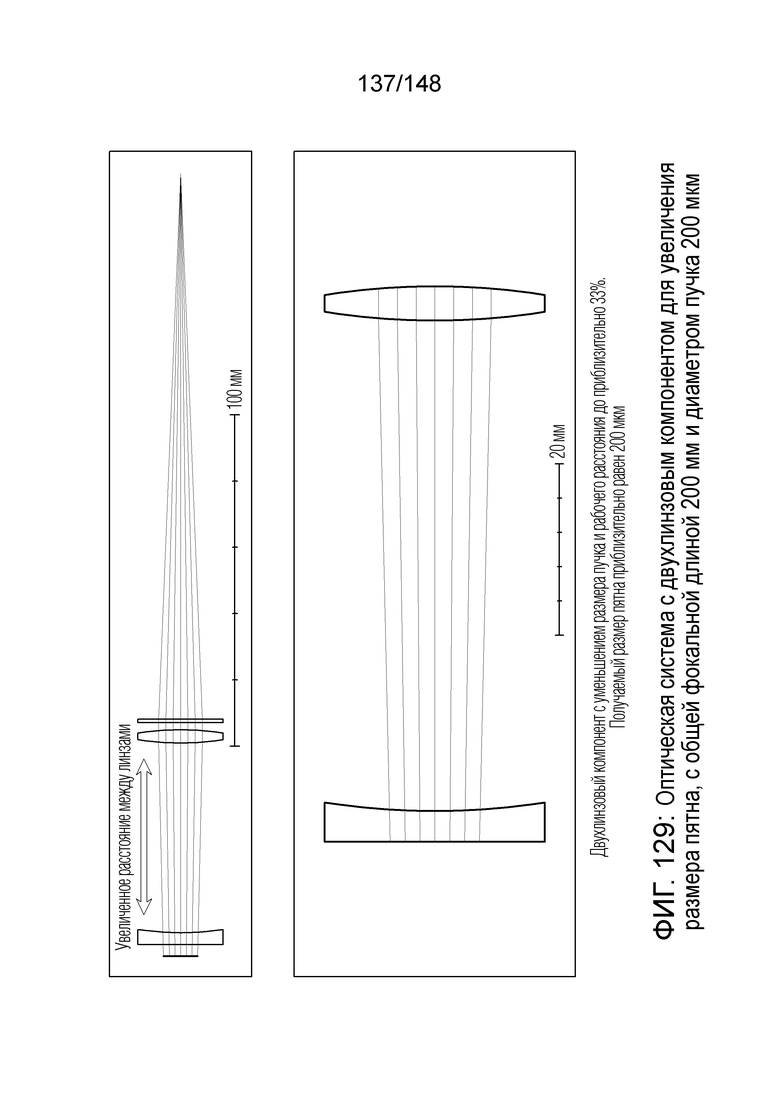


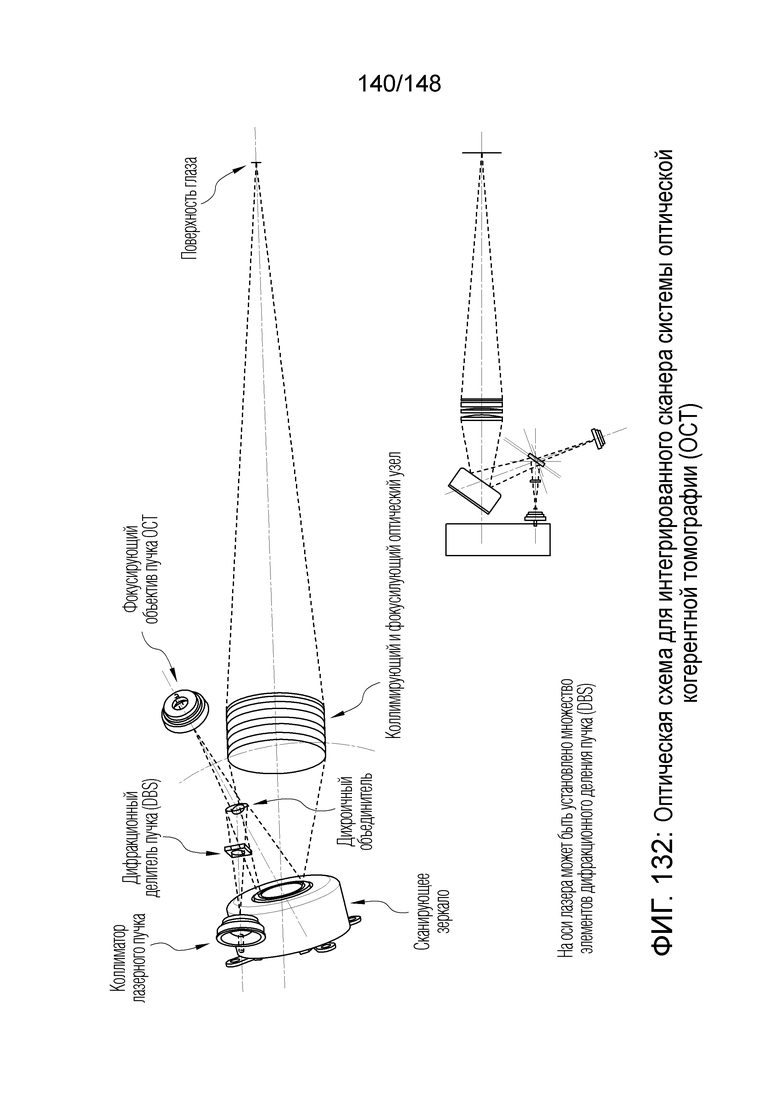



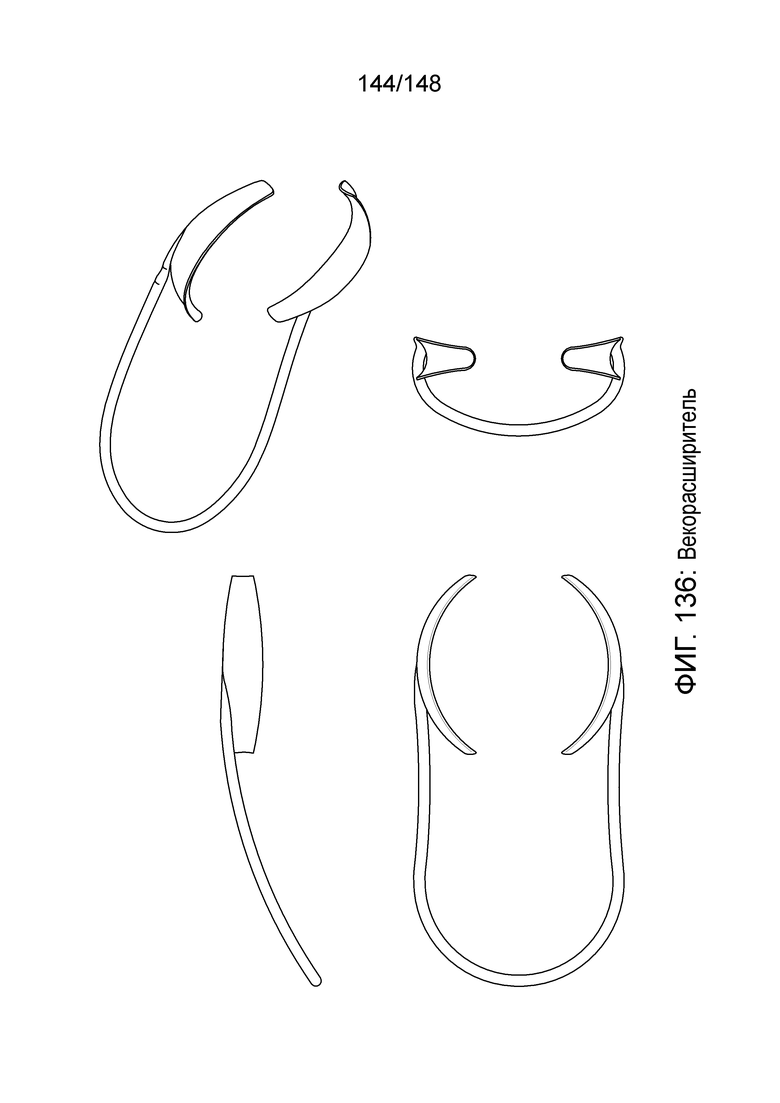
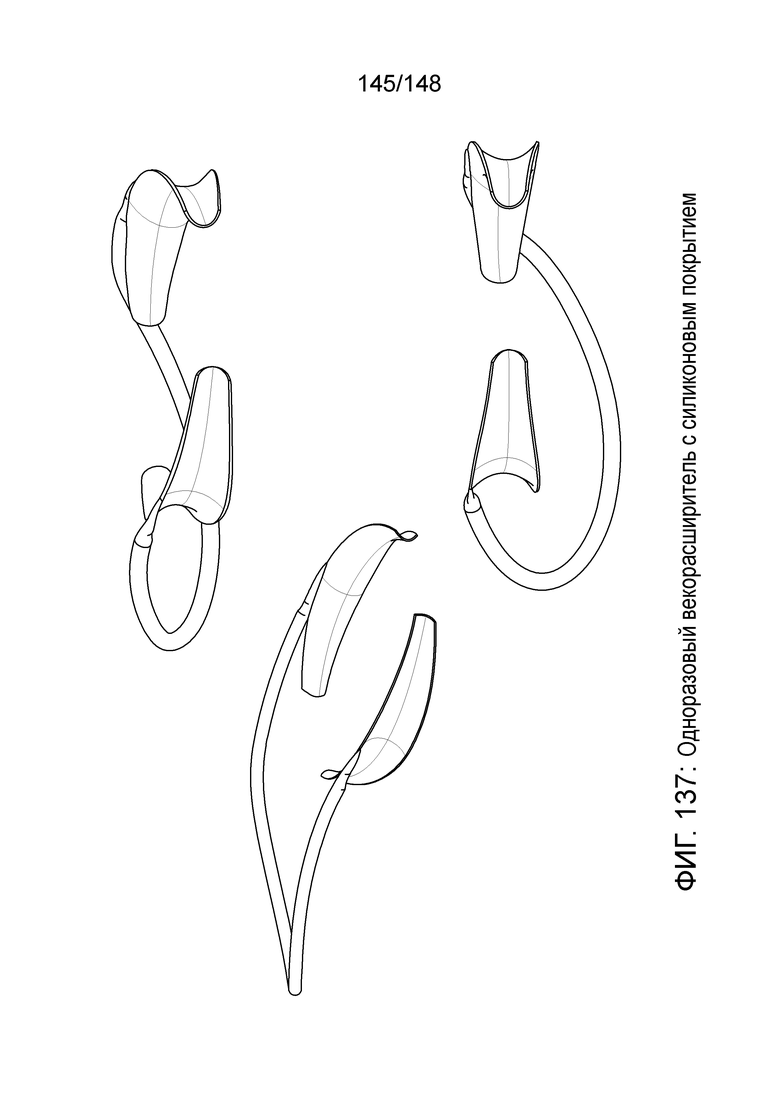
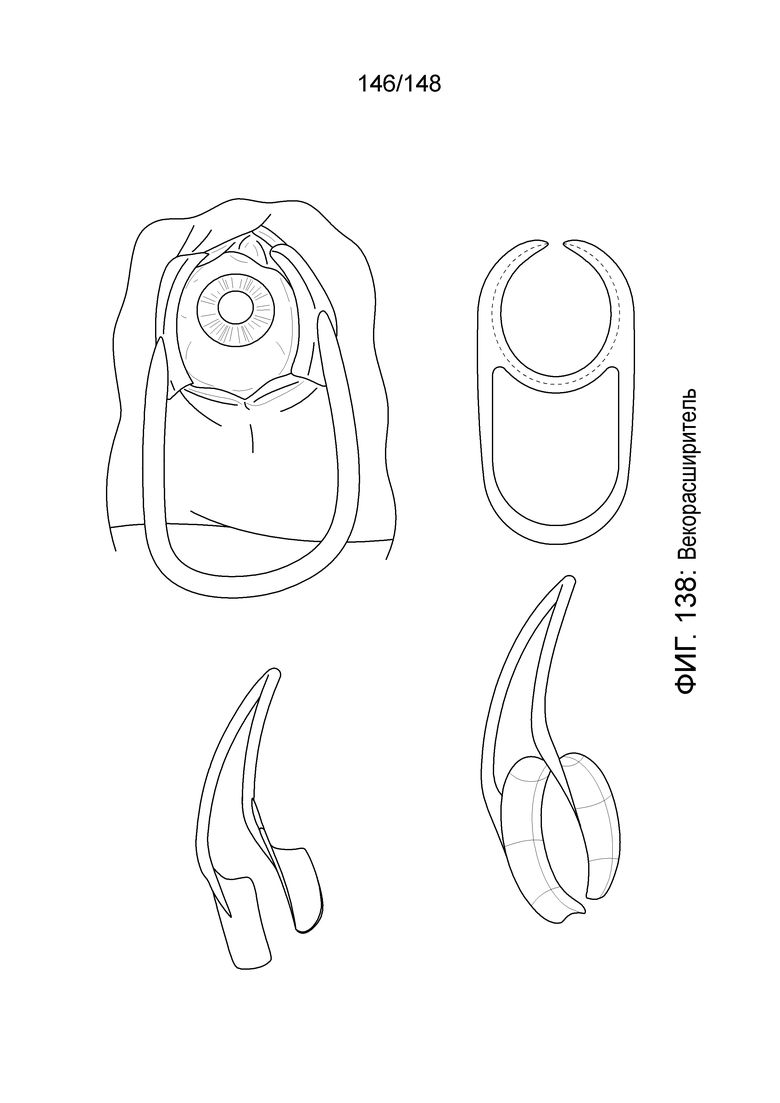


Изобретение относится к медицине. Система для проведения лечения биологической ткани глаза путем микропорации, содержащая: контроллер; систему лазерной головки, содержащую: корпус, лазерную подсистему для генерации пучка лазерного излучения по оси воздействия, и выполненную с возможностью применения в процессе подповерхностного абляционного лечебного воздействия для создания узора пор, и линзу, выполненную с возможностью фокусировки пучка лазерного излучения на целевую ткань; подсистему слежения за движениями глаза для отслеживания опознавательных точек и движений глаза; подсистему контроля глубины для управления глубиной микропорации на целевой ткани; при этом контроллер выполнен с возможностью управления перемещениями лазерной подсистемы, включающими в себя перемещение наклона, перемещение поворота и перемещение отклонения. Технический результат заявленного изобретения сводится к восстановлению физиологических функций глаза, включая восстановление физиологической аккомодации или физиологической псевдоаккомодации за счет естественных физиологических и биомеханических явлений, связанных с естественной аккомодацией глаза. 17 з.п. ф-лы, 139 фиг.
1. Система для проведения лечения биологической ткани глаза путем микропорации, при этом система содержит:
контроллер;
систему лазерной головки, содержащую:
корпус,
лазерную подсистему для генерации пучка лазерного излучения по оси воздействия, не совмещенной со зрительной осью пациента, и выполненную с возможностью применения в процессе подповерхностного абляционного лечебного воздействия для создания узора пор, и
линзу, выполненную с возможностью фокусировки пучка лазерного излучения на целевую ткань;
подсистему слежения за движениями глаза для отслеживания опознавательных точек и движений глаза;
подсистему контроля глубины для управления глубиной микропорации на целевой ткани; и
причем контроллер выполнен с возможностью управления перемещениями лазерной подсистемы, включающими в себя перемещение наклона, перемещение поворота и перемещение отклонения.
2. Система по п. 1, дополнительно содержащая систему сканирования, коммуникационно связанную с подсистемой слежения за движениями глаза и подсистемой контроля глубины для сканирования фокальным пятном по зоне целевой ткани.
3. Система по п. 1, дополнительно содержащая подсистему обхода для идентификации биологических структур или мест глаза.
4. Система по п. 1, дополнительно содержащая один или более дифракционных делителей пучка.
5. Система по п. 1, в которой узор пор включает в себя поры одинакового размера, формы и глубины.
6. Система по п. 1, в которой узор пор включает в себя поры разных размеров, форм и глубин.
7. Система по п. 1, в которой узор пор включает в себя поры, имеющие равное удаление.
8. Система по п. 1, в которой узор пор включает в себя поры, имеющие разное удаление, и при этом узор пор является, по меньшей мере, узором, выполненным с плотным размещением пор друг к другу или узор выполнен в виде регулярного, повторяющегося геометрического рисунка, или размещенным с промежутками.
9. Система по п. 1, в которой глубина пор пропорциональна суммарной энергии лазера.
10. Система по п. 1, в которой подсистема контроля глубины дополнительно выполнена с возможностью измерения и оценивания глубины поры.
11. Система по п. 10, в которой глубина поры измеряется между импульсами.
12. Система по п. 10, в которой глубина поры измеряется и оценивается между импульсами.
13. Система по п. 1, в которой узор пор является спиральным узором.
14. Система по п. 13, в которой узор пор является спиральным узором из архимедовой спирали, спирали Корню, параболической спирали, гиперболической спирали, спирали жезл, логарифмической спирали, спирали Фибоначчи, золотой спирали или их комбинаций.
15. Система по п. 1, в которой узор пор выполнен в виде матричного массива.
16. Система по п. 1, в которой система лазерной головки дополнительно содержит дисплей для обеспечения фиксации глаза.
17. Система по п. 1, в которой система лазерной головки дополнительно содержит источники подсветки.
18. Система по п. 1, в которой система лазерной головки дополнительно содержит систему видеокамеры, выполненную с возможностью отслеживания движения глаза.
| US 2014316388 A1, 23.10.2014 | |||
| US 2019105200 A1, 11.04.2019 | |||
| US 2013093870 A1, 18.04.2013 | |||
| US 2009299262 A1, 03.12.2009. |

