Область техники
Изобретение относится к системам с использованием отражения или вторичного излучения электромагнитных волн, иных, чем радиоволны, в частности, для определения местоположения объекта наблюдения. Изобретение может быть использовано в автоматизированных системах транспортных средств для предупреждения столкновения.
Предшествующий уровень техники
Известен способ обнаружения объектов на сложных фонах (пат. РФ №2250478 от 11.04.2003; опубл. 20.04.2005; МПК G01S 17/06; авторы Бондаренко А.В., Драб А.Э., Обносов Б.В., Рогова Н.Г., Цибулькин М.Л.), включающий предобработку сигналов, представленных временной последовательностью изображений сцены, на которой возможно появление объекта, запоминание опорных сигналов, вычитание из текущих сигналов опорных сигналов, сравнение полученных разностей с заданным пороговым значением, формирование управляющих сигналов, осуществляющих фрагментарную фильтрацию временной последовательности текущих изображений для пропускания только тех разностных сигналов, абсолютные значения которых превышают пороговое значение.
Недостатком данного способа является сложность алгоритма обработки разностного изображения и ограничение его применения при необходимости обнаружения быстро перемещающегося объекта, особенно в условиях наличия высококонтрастного и быстро изменяющегося фона.
Известен способ селекции объекта на удаленном фоне по патенту РФ (№2081435 от 02.04.84, опубл. 10.06.97; МПК G01S 17/00; авторы: Кочкин В.А., Кутаев Ю.Ф., Полетаев Б.В., Ставраков Г.Н.), заключающийся в приеме и формировании двух изображений в двух пространственно разнесенных точках, одновременной регистрации сформированных изображений, определении параллактического смещения фона, получении разностного изображения путем вычитания смещенного и второго зарегистрированных изображений.
Способ так же трудно применять для обнаружения быстро перемещающегося объекта из-за сложности алгоритма обработки разностного изображения. Сложность обработки изображений приводит к повышенным требованиям к аппаратной реализации средств вычисления для данного способа. Способ не рассчитан на присутствие фоновых объектов, находящихся на расстоянии, сравнимом с искомым объектом.
В качестве прототипа для способа был выбран способ обнаружения объектов, описанный в патенте РФ (№2331084 от 05.10.2006; опубл. 10.08.2008; МПК G01S 17/06; автор Подгорнов В.А.), включающий в себя прием, формирование, регистрацию одновременно опорного и сравниваемого цифровых изображений объекта двумя идентичными видеосистемами на основе многоэлементных высокоскоростных фотоприемников, с параллельными осями объективов, закрепленных друг относительно друга на значительно меньшем расстоянии, чем расстояние до границ зоны контроля.
Однако данный способ так же ограничен в возможностях по обнаружению быстро перемещающегося объекта из-за сложности алгоритма обработки изображений, особенно в случае с матричными многоэлементными фотоприемниками, имеющими большое количество пикселей. Кроме того, из-за высокоскоростной обработки изображений для данного способа требуется аппаратура повышенной сложности.
Раскрытие изобретения
Задачей, на решение которой направлено заявляемое изобретение, является повышение быстродействия обнаружения появления объектов на границе контролируемой зоны в условиях наличия высококонтрастных фоновых объектов, повышение надежности обнаружения объектов.
Технический результат, достигаемый в способе при решении этой задачи, заключается в упрощении алгоритма обработки сигналов от фотоприемников, что повышает скорость и надежность обнаружения объектов.
Для получения указанного технического результата в способе обнаружения объектов с повышенным быстродействием, заключающемся в приеме, формировании, регистрации одновременно опорного и сравниваемого цифровых изображений объекта двумя идентичными видеосистемами на основе многоэлементных высокоскоростных фотоприемников, с параллельными осями объективов, закрепленных друг относительно друга на значительно меньшем расстоянии, чем расстояние до границ зоны контроля. Согласно изобретению, в качестве многоэлементных высокоскоростных фотоприемников используют линейные многоэлементные высокоскоростные фотоприемники, например, фотодиодные линейки, состоящие из пикселей. В качестве объективов используют цилиндрические объективы. Обнаруживают разность выходных сигналов с фотодиодных линеек, по которой определяют информацию о постороннем объекте при пересечении им границы контролируемой зоны.
Совокупность существенных признаков позволяет более быстро получать сигналы от фотодиодных линеек, обрабатывать сигналы с помощью контроллеров, а не процессоров; упрощается электрическая схема сравнения сигналов, упрощается алгоритм обработки сигналов, следовательно повышается надежность обнаружения объектов.
Возможно определять абсолютную разность выходных сигналов с фотодиодных линеек, суммарную для всех пикселей, по которой определять появление постороннего объекта при пересечении им границы контролируемой зоны.
Возможно определять абсолютную разность выходных сигналов с фотодиодных линеек для каждого из пикселей, определять направление появления постороннего объекта в контролируемой зоне по превышению абсолютного разностного сигнала над заданным уровнем для пикселя фотодиодной линейки, выдавшего сигнал. Это позволяет быстрее определить одну из координат постороннего объекта, зная расстояния до границы контролируемой зоны и направление на обнаруженный посторонний объект.
Возможно определять область пикселей, для которых абсолютная разность выходных сигналов с фотодиодных линеек превысила заданные уровни, измерять эту область, оценивать по ней размеры постороннего объекта в контролируемой зоне. Это позволяет быстрее определять не только координату проникновения постороннего объекта на границе охраняемой зоны, но и приблизительный размер этого объекта.
Возможно применять вторую пару оптоэлектронных трактов на основе цилиндрических линз и фотодиодных линеек, повернутую на 90 градусов относительно оси наблюдения первой пары оптоэлектронных трактов. Это позволяет оценить более точно размер постороннего объекта 3 и направление на него по двум координатам.
Возможно пороговую величину разности выходных сигналов с фотодиодных линеек корректировать в процессе контроля с частотой, более чем на два порядка меньшей частоты измерений. Это позволяет учитывать эксплуатационные воздействия, например, загрязнение оптики на устройство.
Краткое описание фигур чертежа
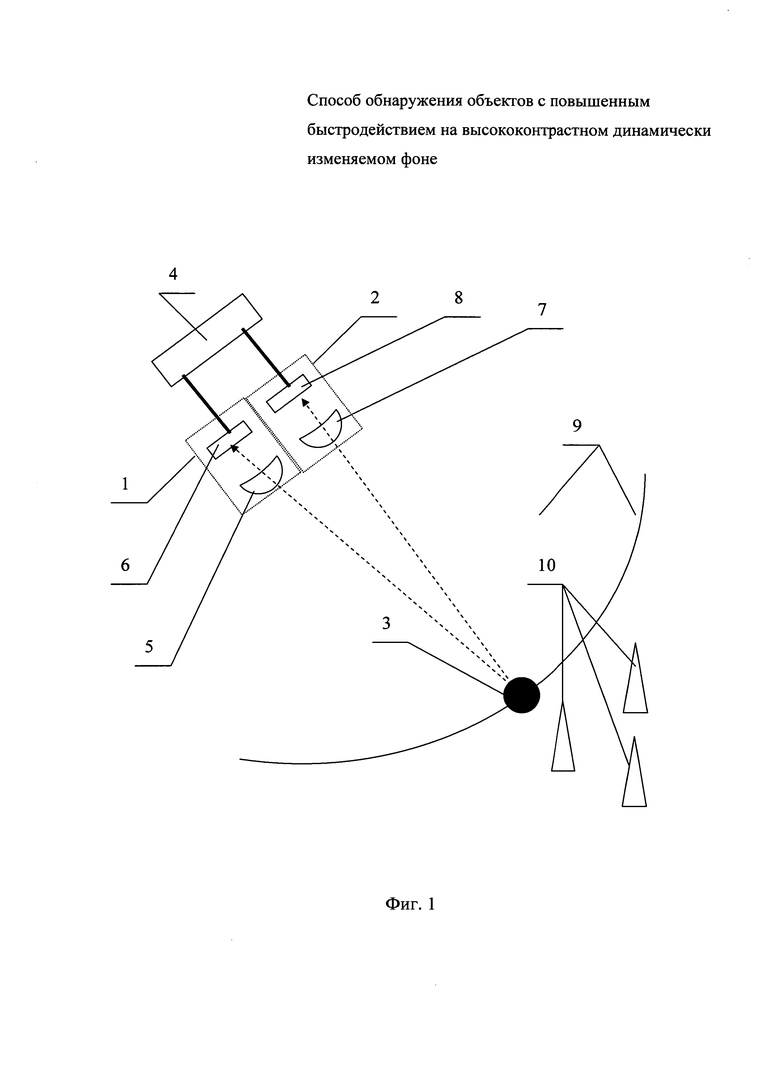
На фиг.1 показана схема обнаружения при появлении постороннего объекта в контролируемой зоне.
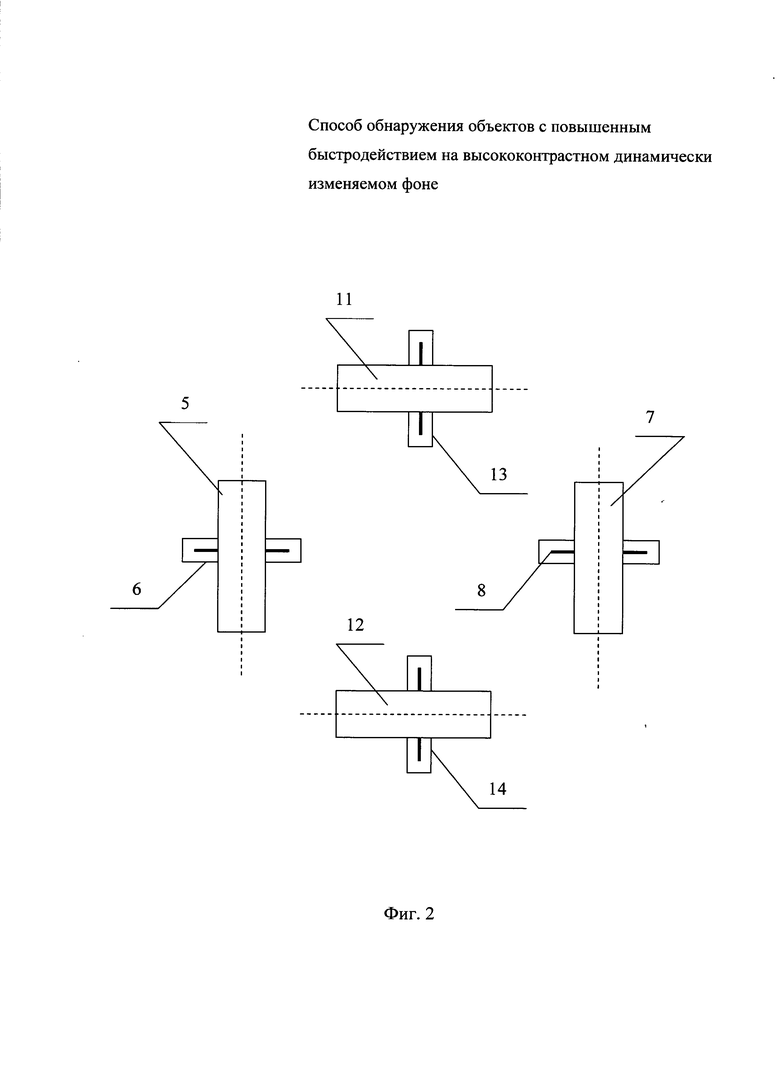
На фиг.2 показана схема обнаружения при появлении постороннего объекта в контролируемой зоне двумя парами оптоэлектронных трактов.
Варианты осуществления изобретения
Как показано на фиг.1, устройство, с помощью которого реализуется способ, организует два идентичных оптоэлектронных тракта 1 и 2, которые регистрируют два изображения наблюдаемого объекта 3. Изображения объекта 3 попадают одновременно в блок обработки 4. Изображение от объекта 3 по тракту 1 формируется цилиндрической линзой 5 на фотоприемнике 6, сигнал с которого поступает в блок обработки 4. Изображение от объекта 3 по тракту 2 формируется цилиндрической линзой 7 на фотоприемнике 8, сигнал с которого также поступает в блок обработки 4.
В режиме ожидания при отсутствии контролируемого объекта 3 на границе или внутри контролируемой зоны 9 два идентичных оптоэлектронных тракта 1 и 2 с заданной частотой регистрируют область контролируемой зоны 9 на высококонтрастном фоне 10, которым считается пространство за границей контролируемой зоны 9.
Блок обработки 4 определяет разность выходных сигналов с многоэлементных скоростных фотоприемников 6 и 8. В случае отсутствия постороннего объекта 3 на границе или внутри контролируемой зоны 9, блок обработки 4 настроен таким образом, что разность сигналов с выходных трактов 1 и 2 отсутствует.
При появлении на границе и дальнейшем продвижении внутрь контролируемой зоны 9 постороннего объекта 3 регистрируют изображения оптическими трактами 1 и 2. Изображения, полученные по трактам 1 и 2, отличаются друг от друга, несмотря на высокий уровень сигнала от высококонтрастного фона 10, который существенно усложняет задачу обнаружения постороннего объекта 3, так как камуфлирует объект 3. На выходе блока обработки 4 появляется разностный сигнал, свидетельствующий о проникновении постороннего объекта 3 в контролируемую зону 9. Такого рода регистрация, сравнение сигналов от фотоприемников 6 и 8 производится с заданной пользователем частотой, позволяющей выполнить процедуру блоком обработки 4 разностных сигналов.
При использовании в качестве фотоприемников 6 и 8 фотодиодных линеек количество сравниваемых сигналов от отдельных пикселей фотодиодных линеек существенно меньше. Этим упрощается и ускоряется процедура сравнения изображений, в данном случае одномерных изображений. Для сохранения угла обзора оптоэлектронными трактами 1 и 2 в случае применения в качестве фотоприемников 6 и 8 фотодиодных линеек используют цилиндрические линзы 5 и 7.
Сравнение разностных выходных сигналов с линейных высокоскоростных фотоприемников 6 и 8 в блоке обработке 4 можно осуществить сложением абсолютной разности выходных сигналов от каждого из пикселей фотоприемников 6 и 8. О появлении постороннего объекта 3 судят по превышению суммарного для всех пикселей фотоприемников 6 и 8 абсолютного разностного сигнала над заранее заданным уровнем. Для обработки сигналов, полученных от фотоприемников 6 и 8 в блоке обработке 4, можно использовать более дешевые компаратор и контроллеры с более высоким быстродействием.
При анализе блоком обработки 4 превышения абсолютной разности выходных сигналов фотоприемников 6 и 8 для каждого из пикселей над заранее заданным уровнем для отдельных пикселей выявляют пиксели, для которых произошло превышение сигнала, и, проводя от них через оптический центр цилиндрических линз 5 и 7 линию, определяют направление на место проникновения постороннего объекта 3 в контролируемую зону 9.
В том случае, если объект 3, проникнувший в зону 9, имеет значительные размеры, то превышение абсолютного полученного сигнала над заданным уровнем будет регистрироваться для группы близлежащих пикселей на фотодиодной линейке фотоприемников 6 и 8. Определяют область пикселей, для которых абсолютная разность выходных сигналов с фотодиодных линеек превысила заданные уровни, измеряют эту область, оценивают по ней размеры постороннего объекта в контролируемой зоне.
Это дает возможность оценить протяженность постороннего объекта 3, приведенного к расстоянию от оптоэлектронного тракта 1 или 2 до границы контролируемой зоны 9. Это позволяет быстрее определять не только координату проникновения постороннего объекта на границе охраняемой зоны, но и приблизительный размер этого объекта.
Для оценки более точного размера постороннего объекта 3 и направления на него по двум координатам применяется вторая пара оптоэлектронных трактов на основе цилиндрических линз 11, 12 (фиг.2) и фотодиодных линеек 13 и 14, повернутая на 90 градусов относительно оси наблюдения первой пары оптоэлектронных трактов на основе цилиндрических линз 5, 7 (фиг.2) и фотодиодных линеек фотоприемников 6 и 8.
При длительном наблюдении контролируемой зоны 9 возможно загрязнение одной из цилиндрических линз 5, или 7, 11, или 12. Это изменяет условия регистрации и приводит к появлению квазипостоянной разности выходных сигналов с фотоприемников 6 и 8. Блок обработки 4 отслеживает появление постоянного сигнала и не вводит его в определяемую разность сигналов. Блок обработки 4 корректирует пороговую величину разности выходных сигналов с фотодиодных линеек фотоприемников 6 и 8 в процессе контроля с частотой, более чем на два порядка меньшей частоты измерений. Таким образом, минимизируется влияние загрязнения оптики на работу устройства в целом.
Для увеличения динамического диапазона регистрации изображений парой оптоэлектронного тракта 1 и 2 регистрацию изображений производят при разных экспозициях фотодиодных линеек фотоприемников 6 и 8.
Промышленная применимость
Наиболее эффективно выглядит использование предложенного способа для предупреждения столкновения транспортного средства с посторонними объектами, возникающими на его пути при движении.
Рассмотренный вариант выполнения изобретения может быть реализован на существующем в настоящее время оборудовании с применением известных материалов. Это показывает его работоспособность, и подтверждает промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383900C2 |
| АВТОМАТИЧЕСКИЙ ИДЕНТИФИКАТОР ОБЪЕКТОВ | 2012 |
|
RU2513765C1 |
| СПОСОБ СЕЛЕКЦИИ ПО ДАЛЬНОСТИ МНОЖЕСТВЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2498336C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ПО ГЕОМЕТРИИ ЛАДОНИ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ | 2000 |
|
RU2207625C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ ОПТИЧЕСКИМИ СИСТЕМАМИ С ВОЗДУШНОГО НОСИТЕЛЯ | 2019 |
|
RU2714701C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ПО ГЕОМЕТРИИ ЛАДОНИ | 2000 |
|
RU2215323C2 |
Изобретение относится к системам с использованием отражения или вторичного излучения электромагнитных волн, иных, чем радиоволны, и может быть использовано для определения местоположения объекта наблюдения в автоматизированных системах транспортных средств для предупреждения столкновения. Технический результат изобретения заключается в повышении быстродействия обнаружения объектов. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне заключается в обнаружении разности выходных опорного и сравниваемого сигналов с двух идентичных видеосистем на основе многоэлементных высокоскоростных фотоприемников в виде фотодиодных линеек с параллельными осями цилиндрических объективов, закрепленных друг относительно друга на значительно меньшем расстоянии, чем расстояние до границы зоны контроля, и определении по упомянутой разности информации о проникновении постороннего объекта в контролируемую зону при пересечении им её границ. 5 з.п. ф-лы, 2 ил.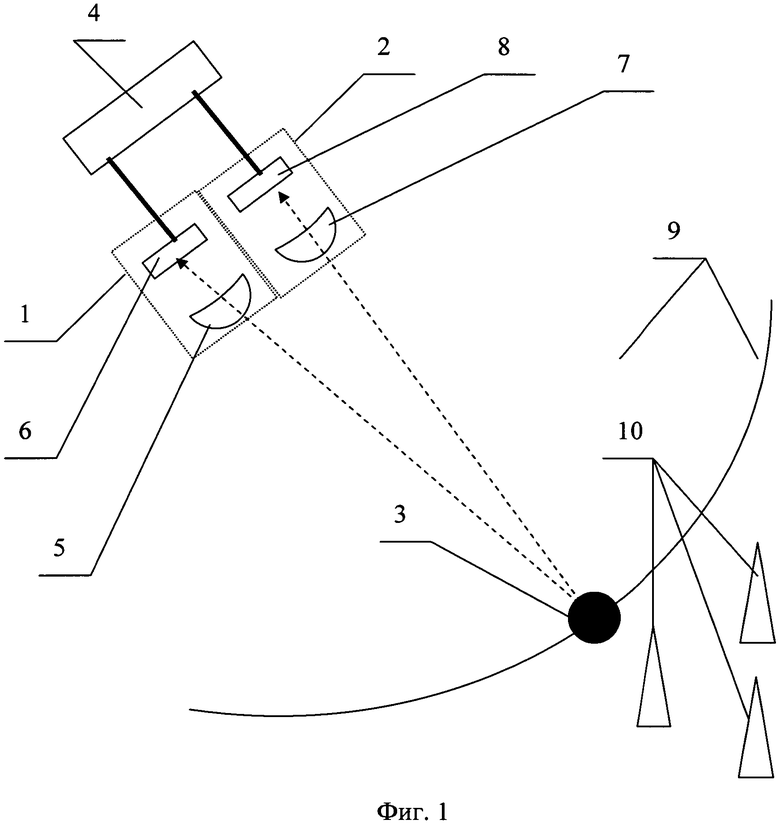
1. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне, заключающийся в приеме, формировании, регистрации одновременно опорного и сравниваемого цифровых изображений объекта двумя идентичными видеосистемами на основе многоэлементных высокоскоростных фотоприемников, с параллельными осями объективов, закрепленных друг относительно друга на значительно меньшем расстоянии, чем расстояние до границ зоны контроля, отличающийся тем, что в качестве многоэлементных высокоскоростных фотоприемников используют линейные многоэлементные высокоскоростные фотоприемники в виде фотодиодных линеек, состоящих из пикселей, а в качестве объективов используют цилиндрические объективы, обнаруживают разность выходных сигналов с фотодиодных линеек, по которой определяют информацию о проникновении постороннего объекта в контролируемую зону при пересечении им ее границы.
2. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне по п.1, отличающийся тем, что определяют абсолютную разность выходных сигналов с фотодиодных линеек, суммарную для всех пикселей, по превышению которой заданного уровня определяют появление постороннего объекта при пересечении им границы контролируемой зоны.
3. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне по п.1, отличающийся тем, что определяют абсолютную разность выходных сигналов с фотодиодных линеек для каждого из пикселей, определяют направление появления постороннего объекта в контролируемой зоне по пикселям фотодиодных линеек, абсолютная разность выходных сигналов с которых превышает заданный уровень.
4. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне по п.1, отличающийся тем, что определяют область пикселей, для которых абсолютная разность выходных сигналов с фотодиодных линеек превысила заданные уровни, измеряют эту область, оценивают по ней характерный размер в одном из измерений постороннего объекта в контролируемой зоне.
5. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне по п.1, отличающийся тем, что применяют вторую пару оптоэлектронных трактов на основе цилиндрических линз и фотодиодных линеек, повернутую на 90 градусов относительно оси наблюдения первой пары оптоэлектронных трактов.
6. Способ обнаружения объектов с повышенным быстродействием на высококонтрастном динамически изменяемом фоне по п.1, отличающийся тем, что пороговую величину разности выходных сигналов с фотодиодных линеек корректируют в процессе контроля с частотой, более чем на два порядка меньшей частоты измерений.
| ФОСФОЛИПИДНАЯ КОМПОЗИЦИЯ | 2010 |
|
RU2448731C2 |
| US 5543917 A, 06.08.1996 | |||
| Опрыскиватель | 1980 |
|
SU935048A1 |
| JPS 55138604 A, 29.10.1980 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 1986 |
|
RU2107929C1 |
| Прибор для короткозамедленного взрывания детонирующим шнуром | 1954 |
|
SU100635A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1996 |
|
RU2160453C2 |

