Изобретение относится к способам пассивной оптической локации объектов, а более конкретно к способам обнаружения объектов в окружающем пространстве, и может быть применено на транспорте для предупреждения столкновений.
Известен способ обнаружения объекта в окружающем пространстве, реализованный в системах видеонаблюдения с компьютерным зрением, например Orwell 2k-Perimeter [www.elvees.ru], заключающийся в локализации объекта на одном зарегистрированном изображении при помощи морфологических фильтров.
Недостатком данного способа является невозможность локализации заранее неизвестного объекта на сложном изменяющемся удаленном фоне.
В качестве прототипа выбран способ селекции объекта на удаленном фоне по патенту РФ №2081435 от 02.04.84, МПК G01S 17/00, заключающийся в приеме и формировании опорного и сравниваемого изображений двумя идентичными оптическими системами, установленными в двух пространственно разнесенных точках и ориентированными на заданное направление параллельными главными оптическими осями объективов обеих оптических систем, одновременной регистрации обоих изображений и последующей их обработке с включением определения параллактического смещения объекта на сравниваемом изображении относительно опорного.
Прототип имеет ряд недостатков:
- невозможность обнаружения объекта с любого направления (в угле 360°);
- относительно большие габариты (занимаемая площадь) при размещении нескольких пар идентичных оптических систем на одной плоскости.
Задача изобретения: создание способа обнаружения объекта в окружающем пространстве с любого направления (в угле 360°) его приближения, при условии ведения наблюдения с плоскости основания, имеющей незначительную площадь.
Поставленная задача достигается тем, что в способе обнаружения объекта в окружающем пространстве, заключающемся в приеме и формировании опорного и сравниваемого изображений двумя идентичными оптическими системами, установленными в двух пространственно разнесенных точках и ориентированными на заданное направление параллельными главными оптическими осями объективов обеих оптических систем, одновременной регистрации обоих изображений и последующей их обработке с включением определения параллактического смещения объекта на сравниваемом изображении относительно опорного, согласно изобретению, прием и формирование опорного и сравниваемого изображений производят N парами идентичных оптических систем, ориентированных на собственные направления с охватом всего окружающего пространства, при этом оптические системы в каждой паре разносят относительно друг друга по нормали к единой плоскости и обеспечивают во всех парах единый стереоскопический базис.
Техническая сущность заключается в оптимизации размещения оптических систем с получением оптического стереоскопического панорамного изображения (стереопары - опорного и сравниваемого изображений).
Возможен вариант, где оптические системы всех N пар разносят по единой нормали к плоскости с последовательным чередованием оптических систем разных пар.
Возможен вариант, где оптические пары разносят по кругу относительно единой центральной нормали к плоскости, при этом нормали всех пар ориентируют параллельно друг другу и центральной нормали.
Кроме того, для получения наиболее точной информации о направлении на объект в данный момент времени регистрация оптического стереоскопического панорамного изображения N парами идентичных оптических систем производится одновременно.
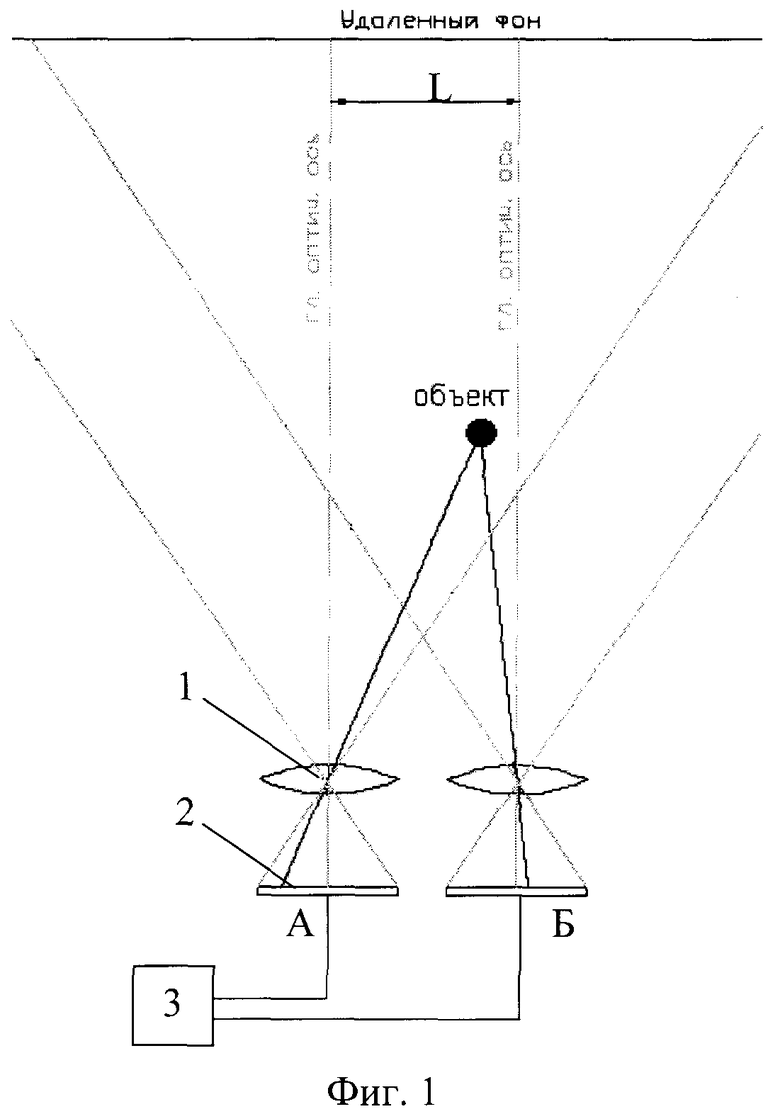
На фиг.1 показана пара идентичных оптических систем, регистрирующая стереопару - опорное (А) и сравниваемое (Б) изображение, а стереоскопический базис обозначен буквой L. Оптическая система состоит из объектива 1 и матричного многоэлементного фотоприемника 2 (CMOS-матрицы), сигнальный выход которого соединен с сигнальным входом коммутационного блока 3 (электрической микросхемы).
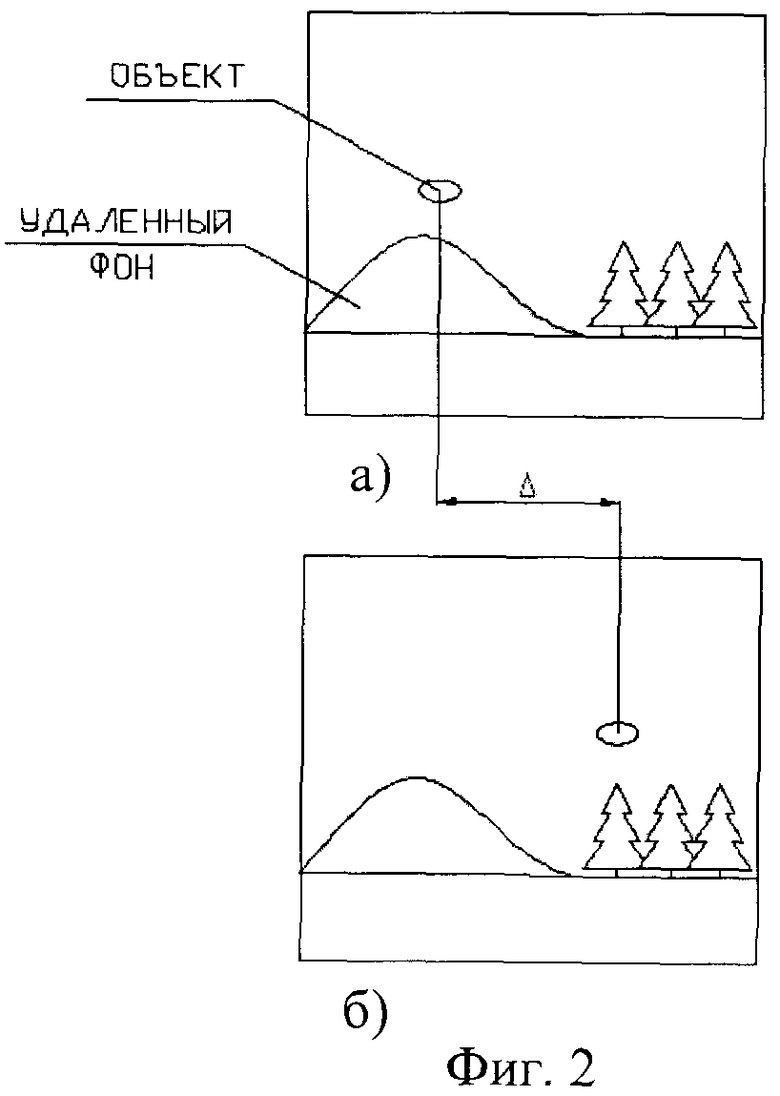
На фиг.2а показана схема опорного изображения, а на фиг.2б - сравниваемого изображения, где Δ - параллактическое смещение объекта относительно неподвижного удаленного фона.
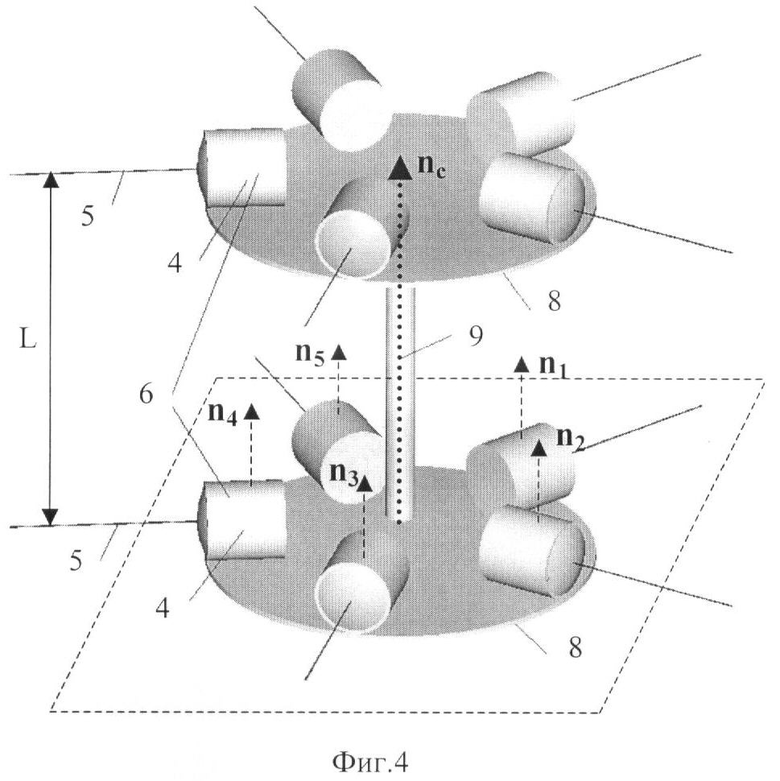
На фиг.3 изображен первый вариант реализации способа обнаружения объекта в окружающем пространстве. Цифрами на фигуре обозначены следующие элементы: 4 - оптическая система (всего 10 идентичных друг другу систем), 5 - главная оптическая ось объектива, 6 - пара идентичных оптических систем с сонаправленными параллельными главными оптическими осями объективов (всего 5 пар, N=5), 7 - держатель, на котором закреплены все оптические системы.
На фиг.4 представлен другой вариант реализации способа обнаружения объекта в окружающем пространстве. Цифрами на фигуре обозначены следующие элементы: 8 - основание в форме диска, на котором крепится половина оптических систем 4, 9 - держатель оснований 8. На верхнем основании 8 крепятся оптические системы, регистрирующие опорное изображение, а на нижнем основании 8 - сравниваемое, или наоборот.
Способ реализуют следующим образом.
Количество N пар идентичных оптических систем выбирают исходя из условия сплошности зоны наблюдения объекта в окружающем пространстве (в угле 360°).
Каждая из N пар идентичных оптических систем с параллельными главными оптическими осями объективов (в паре), и ориентированная на собственное направление (фиг.1), одновременно регистрирует свой фрагмент двух изображений (опорного - фиг.2а и сравниваемого - фиг.2б).
На опорном (фиг.2а) и сравниваемом (фиг.2б) изображении удаленный фон не смещен. Объект, находящийся ближе фона, на сравниваемом изображении смещен вправо (относительно фона), а на опорном изображении - влево, причем, как видно из фиг.1, величина смещения (Δ) зависит от удаленности объекта.
Анализируя полученное стереоскопическое изображение, выделяя на опорном изображении фрагменты с параллактическим смещением Δ, отличным от нуля, получают фрагменты, являющиеся изображением искомого объекта.
Варианты реализации способа для получения оптического стереоскопического панорамного изображения (фиг.3, 4) обеспечивают габариты, позволяющие устанавливать приборы на платформы, имеющие малую площадь основания.
В варианте, показанном на фиг.3, оптические системы 4 всех N пар 6 разносят по единой нормали n к плоскости основания (показано пунктирной линией), с последовательным чередованием оптических систем разных пар 6. Оптические системы 4 закреплены на держателе 7 - трубе.
В варианте, показанном на фиг.4, оптические пары 6 разносят по кругу относительно единой центральной нормали nc к плоскости основания (показано пунктирной линией), при этом нормали всех пар 6 (n1…n5) ориентируют параллельно друг другу и центральной нормали nc. Оптические системы 4 закреплены на двух основаниях 8, зафиксированных на держателе 9.
Реализация того и другого варианта способа является осуществимой на основе серийно выпускаемой промышленностью видеоаппаратуры, а микропроцессорная аппаратура позволяет достичь необходимого уровня быстродействия обработки всех зарегистрированных стереопар.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ | 2008 |
|
RU2395054C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| Способ локализации появления цели среди стационарных объектов с движущегося носителя | 2024 |
|
RU2834194C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ ОПТИЧЕСКИМИ СИСТЕМАМИ С ВОЗДУШНОГО НОСИТЕЛЯ | 2019 |
|
RU2714701C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ НА ВЫСОКОКОНТРАСТНОМ ДИНАМИЧЕСКИ ИЗМЕНЯЕМОМ ФОНЕ | 2014 |
|
RU2576471C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОД ВОДОЙ | 2009 |
|
RU2424542C2 |
| СПОСОБ СЕЛЕКЦИИ ПО ДАЛЬНОСТИ МНОЖЕСТВЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2498336C1 |
Изобретение относится к способу обнаружения объектов в окружающем пространстве. Способ обнаружения объекта в окружающем пространстве заключается в приеме и формировании опорного и сравниваемого изображений, одновременной регистрации обоих изображений и их обработке с включением определения параллактического смещения объекта на сравниваемом изображении относительно опорного. Прием и формирование опорного и сравниваемого изображений производят N парами идентичных оптических систем, ориентированных на собственные направления с охватом всего окружающего пространства. Оптические системы в каждой паре разносят относительно друг друга по нормали к единой плоскости и обеспечивают во всех парах единое базовое расстояние между главными оптическими осями объективов собственных оптических систем. Заявленное изобретение направлено на обеспечение обнаружения объекта в окружающем пространстве при условии наблюдения с плоскости основания, имеющей незначительную площадь. Технический результат: обеспечение возможности обнаружения объекта в пространстве в угле 360°. 2 з.п. ф-лы, 4 ил.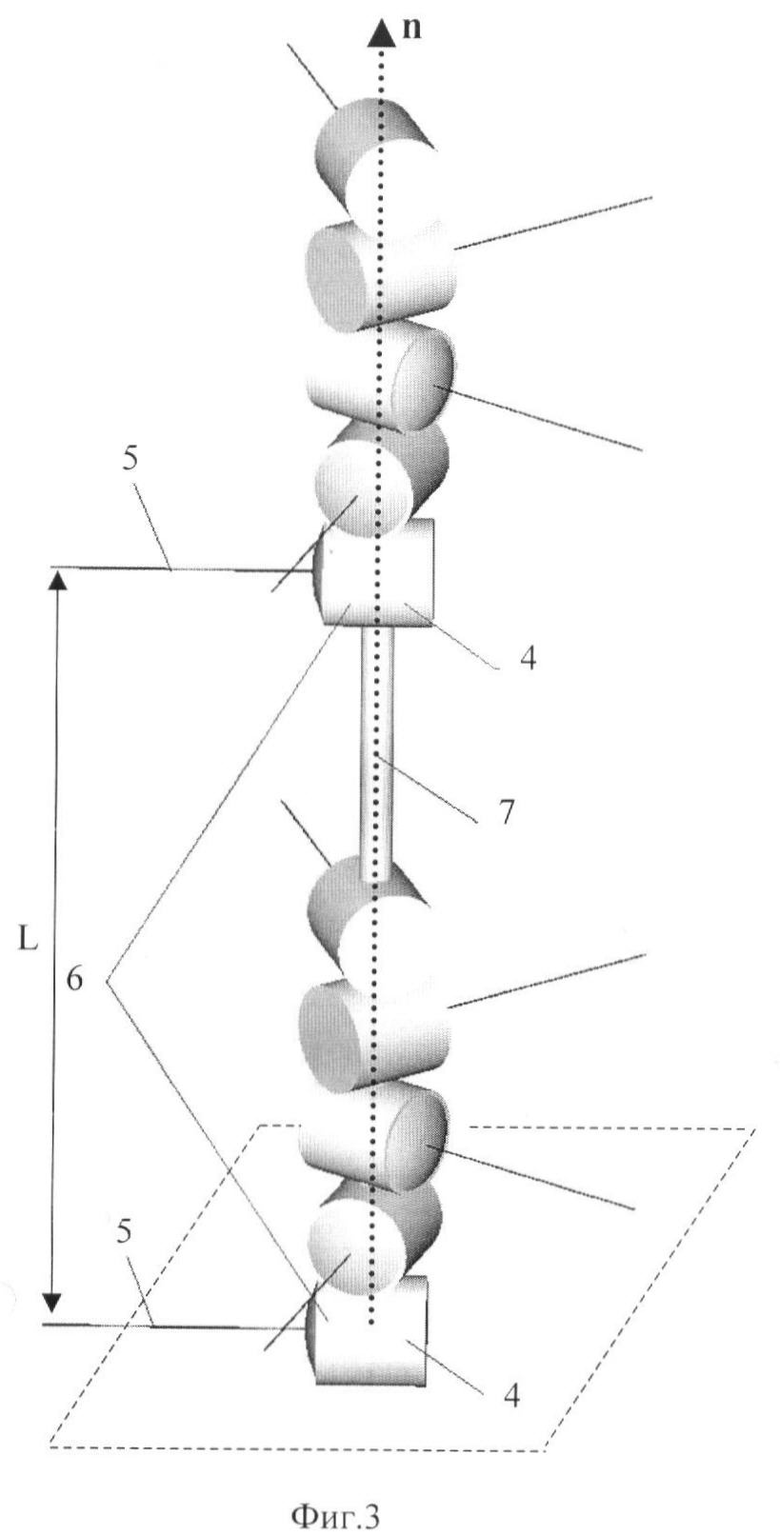
1. Способ обнаружения объекта в окружающем пространстве, заключающийся в приеме и формировании опорного и сравниваемого изображений двумя идентичными оптическими системами, установленными в двух пространственно разнесенных точках и ориентированными на заданное направление параллельными главными оптическими осями объективов обеих оптических систем, одновременной регистрации обоих изображений и последующей их обработке с включением определения параллактического смещения объекта на сравниваемом изображении относительно опорного, отличающийся тем, что прием и формирование опорного и сравниваемого изображений производят N парами идентичных оптических систем, ориентированных на собственные направления с охватом всего окружающего пространства, при этом оптические системы в каждой паре разносят относительно друг друга по нормали к единой плоскости и обеспечивают во всех парах единое базовое расстояние между главными оптическими осями объективов собственных оптических систем.
2. Способ обнаружения объекта в окружающем пространстве по п.1, отличающийся тем, что оптические системы всех N пар разносят по единой нормали к плоскости, с последовательным чередованием оптических систем разных пар.
3. Способ обнаружения объекта в окружающем пространстве по любому из пп.1 и 2, отличающийся тем, что регистрацию изображений всех оптических систем производят одновременно.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |
| US 4355328 A, 19.10.1982 | |||
| WO 2007121886 A2, 01.11.2007 | |||
| US 3542948 A, 24.11.1970 | |||
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |

