Изобретение относится к локализации (выделению), в частности к пассивным оптическим способам селекции (обнаружения) посторонних объектов на сложном контрастном динамически изменяемом фоне в охраняемой (контролируемой) зоне.
Известен способ выделения объектов по патенту РФ №2081439 от 27.09.84, МПК G01S 17/06, в котором производится формирование изображения объектов и фона в плоскости, соответствующей априорной дальности до объекта, и дополнительно в плоскости, смещенной относительно первой плоскости, с последующей математической обработкой. Однако такой способ, как это и следует из описания патента, применим только в случае использования соответствующего телескопа или длиннофокусного объектива, что приводит к исключительно малой обзорности и, как следствие, низкому быстродействию при контроле всей охраняемой зоны, а не только узкого направления. Все это приводит к низкой обнаружительной способности в целом. Кроме того, быстрое перемещение объекта или резкое изменение фона при непринятии специальных мер по общему повышению быстродействия тракта регистрации (например, одновременной регистрации всех пикселей изображения) приведет к размытию изображения и неэффективности применяемого метода математической обработки, так контуры объекта могут быть не замкнуты или вообще частично исчезнуть.
Известен способ обнаружения объектов на сложных фонах, включающий операцию предобработки сигналов, представленной временной последовательностью изображений сцены, на которой возможно появление объекта, запоминание опорных сигналов, а также вычитание из соответствующих текущих сигналов соответствующих опорных сигналов, при этом алгоритм обработки предусматривает разделение каждого изображения на фрагменты, измерение величины признаков каждого фрагмента, например оптической плотности, запоминание соответствующих сигналов, а после вычитания сигналов сравнение полученных разностей с заданным пороговым значением, формирование управляющих сигналов, осуществляющих фрагментарную фильтрацию временной последовательности текущих изображений для пропускания только тех разностных сигналов, абсолютные значения которых превышают пороговое значение (пат. РФ №2250478 от 11.04.2003, МПК G01S 17/06).
Недостатком данного способа является сложность алгоритма обработки разностного изображения и ограничение его применения при необходимости обнаружения быстро перемещающегося объекта, т.к. для данного алгоритма обработки будет недостаточно данных для обеспечения достоверного результата.
В качестве прототипа выбран способ селекции объекта на удаленном фоне по патенту РФ №2081435 от 02.04.84, МПК G01S 17/00, заключающийся в приеме и формировании двух изображений в двух пространственно разнесенных точках, одновременной регистрации сформированных изображений, определении параллактического смещения фона путем формирования взаимокорреляционной функции двух зарегистрированных изображений и определении ее максимума, смещении первого из зарегистрированных изображений на величину параллактического смещения фона в направлении, противоположном этому смещению, получении разностного изображения путем вычитания смещенного и второго зарегистрированных изображений, разделении разностного изображения на области, имеющие противоположные знаки, и анализе фрагментов областей.
Известный способ имеет следующие недостатки.
1. Ограниченные функциональные возможности, так как известный способ не позволяет достоверно обнаруживать малоконтрастный объект на высококонтрастном разнородном фоне, например освещаемыми солнцем облаками, даже при незначительном различии пространственно разнесенных оптических систем формирования и регистрации изображений, например, вызванном условиями эксплуатации или технологической погрешностью изготовления. В результате за искомый объект могут быть приняты случайные флуктуации в разностном изображении.
2. Ограниченную применимость, так как алгоритм работы известного способа не рассчитан на фоновые объекты, находящиеся на сравнимых с искомым объектом расстоянии, а не на бесконечном удалении.
3. Относительно низкую селективность в случае одновременной регистрации изображений группы объектов, когда применение алгоритма работы известного способа может привести к селекции «ложных» объектов.
Задачей, стоящей перед настоящим изобретением, является повышение точности обнаружения (селекции) одного и более объектов в условиях высококонтрастных сравнительно близкорасположенных фоновых объектов при одновременном увеличении быстродействия и обзорности.
Поставленная задача решается следующим образом.
В способе селекции объекта на удаленном фоне, заключающемся в приеме и формировании двух изображений в двух пространственно разнесенных точках, одновременной регистрации сформированных изображений, согласно изобретению опорное и сравниваемое цифровые изображения регистрируют одномоментно для каждого фрагмента изображений двумя идентичными видеосистемами на основе многоэлементных высокоскоростных фотоприемников, например CMOS-матриц с объективами, которые предварительно фиксируют на небольшом, по сравнению с удалением от предполагаемого места появления объекта, расстоянии между собой параллельно друг другу в направлении на контролируемое пространство, а анализ изображений проводят при помощи определения величин смещения Δ характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного при максимально возможном их совпадении в направлении параллактического смещения и последующего выявления селектируемого и фоновых объектов из полученных смещений Δ.
Техническая сущность изобретения заключается в применении эффекта бинокулярного зрения, подобного человеческому зрению, когда каждая из видеосистем выполняет функцию отдельного глаза, принимающего изображение объекта, сдвинутым на определенную величину относительно удаленного фона. Сдвиг тем больше, чем ближе объект. Как и в человеческом зрении, для выявления (обнаружения) объекта производится совмещение его изображений, полученных разнесенными видеосистемами, до полного совпадения, при этом изображение фона размывается.
Кроме того, для повышения узнаваемости вида обнаруженных объектов, смещения Δ строят в виде трехмерного распределения относительно опорного изображения, анализируют связность полученных трехмерных изображений объектов, их геометрические размеры и расположение относительно друг друга в контролируемом пространстве.
Кроме того, может быть определено расстояние до обнаруженных объектов R из выражения R=L·A/Δ, где L - расстояние между центрами объективов видеосистем, А - расстояние от видеоматрицы до главной оптической оси объектива видеосистемы.
Кроме того, для сокращения времени обработки допускается проводить определение смещений Δ не для всех характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного, а выборочно, через заданный шаг.
Кроме того, для сокращения времени обработки допускается проводить определение смещений Δ в области смещений, определенной при обработке предыдущей по времени пары цифровых изображений.
Кроме того, для повышения обнаружительной способности предлагаемого способа и упрощения анализа трехмерного распределения смещения Δ допускается предварительное определение калибровочного трехмерного распределения смещения Δ для случая фоновых объектов, заведомо удаленных на значительное расстояние от контролируемой области, и вычитание данного калибровочного распределения из текущего.
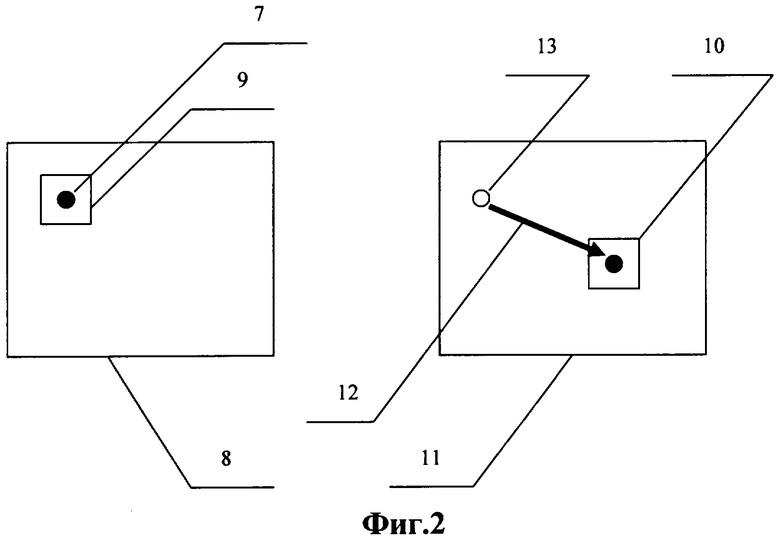
На фиг.1 приведено схематическое расположение двух видеосистем и объекта относительно фона. Видеосистемы содержат многоэлементные CMOS-матрицы 1 и 2 и объективы 3 и 4, полностью идентичные друг другу. Матрицы и объективы зафиксированы на основании 5 на небольшом расстоянии L относительно друг друга. Выходы матриц 1 и 2 подключены к блоку 6 обработки информации.
На фиг.2 показано как для каждого пикселя 7 опорного цифрового изображения 8 выделяется прямоугольный фрагмент (матрица) 9 опорного изображения, которому ищется близкий или совпадающий аналогичный фрагмент (матрица) 10, но уже в сравниваемом изображении 11 в направлении параллактического смещения 12, начиная с пикселя 13 в сравниваемом изображении, соответствующем текущему пикселю 7 опорного изображения.
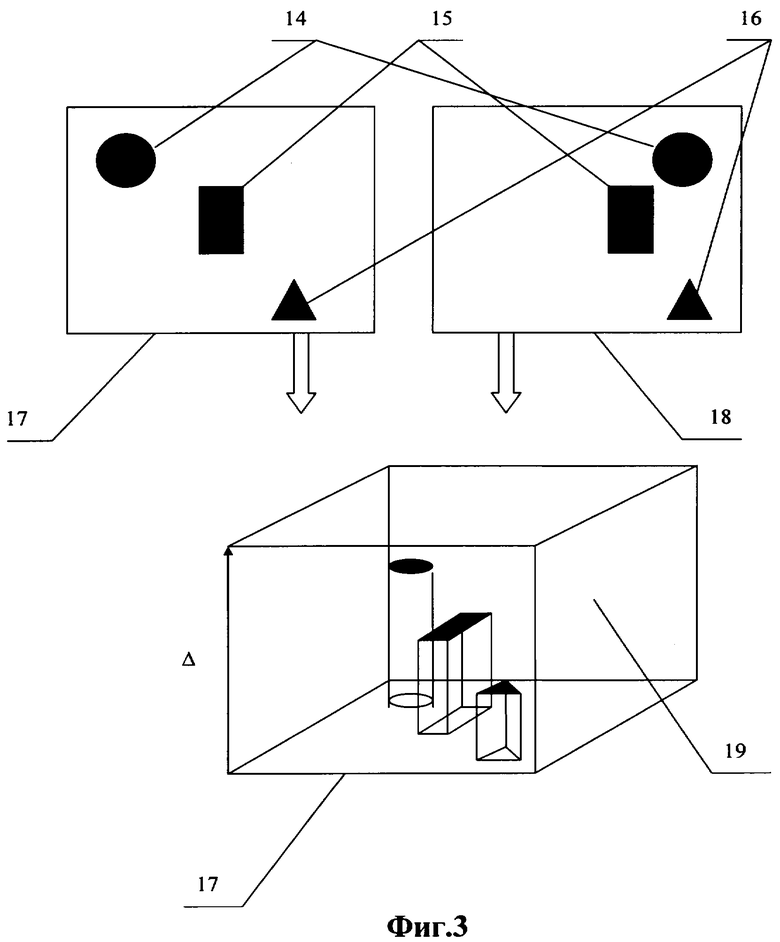
На фиг.3 для изображений объектов 14, 15 и 16 в опорном 17 и сравниваемом 18 цифровых изображениях показано построение трехмерного распределения 19 смещений Δ относительно опорного изображения 17.
Способ реализуется следующим образом.
Начало наблюдения, связанное с отсутствием объекта, характеризуется регистрацией только фона каждой из обеих видеосистем в один и тот же момент времени. Удаленный фон, как правило, представляет собой комбинацию динамически изменяемого неба за счет облаков, перемещающихся в разных направлениях, и более стабильного земного покрова (хотя стабильность его также условна за счет ветра, вызывающего колыхание растительности). Объект может появляться в заранее неизвестном месте и перемещаться в широком диапазоне скоростей. При этом объект может перемещаться в разных направлениях, включая хаотичные или наблюдаемые в природе. Объект может иметь различные размеры и быть защищенным камуфляжем. Регистрация обоих (опорного и сравниваемого) цифровых изображений производится с заданной частотой, определяемой характеристиками CMOS-матрицы и блока обработки. В момент появления объекта в контролируемом пространстве (зоне) обе CMOS-матрицы 1 и 2 зарегистрируют изображение объекта на удаленном фоне (фиг.1) с разным смещением относительно фона.
Для определения смещений Δ и, как следствие, расстояний R до регистрируемых на изображениях объектов и их фрагментов, включая фоновые, для каждого пикселя 7 опорного цифрового изображения 8 выделяется, как это показано на фиг.2, прямоугольный фрагмент (матрица) 9 опорного изображения, которому ищется близкий или совпадающий аналогичный фрагмент (матрица) 10, но уже в сравниваемом изображении 11. Для сокращения времени счета поиск совпадения осуществляется в направлении параллактического смещения 12, начиная с пикселя 13 в сравниваемом изображении, соответствующем текущему пикселю 7 опорного изображения. Для сокращения времени счета поиск совпадения не проводят, если прямоугольный фрагмент (матрица) 9 опорного изображения не содержит значимых неоднородностей (деталей), например является однородным. Совпадение прямоугольных фрагментов (матрица) 9 и 10 может быть определено, например, как максимум во взаимокорреляционной функции данных фрагментов в направлении параллактического смещения 12. Определенные таким образом смещения Δ для пикселей опорного изображения строятся в виде трехмерного распределения, как это показано на фиг.3, где изображениям объектов 13, 14 и 15 в опорном 16 и сравниваемом 17 цифровых изображениях соответствует трехмерное распределение 19. В дальнейшем производится анализ связности выделенных на трехмерном распределении 19 объектов, определение их геометрических размеров и расположения в контролируемом пространстве. Таким образом, производится локализация (обнаружение) всех объектов, включая фоновые. Одновременно определяется расстояние до каждого из обнаруженных объектов по формуле, приведенной выше.
При этом способ обеспечивает достаточно высокое быстродействие, т.к. можно исключить обработку тех фрагментов, которые не содержат значимых для сравнения деталей изображений, они просто опускаются. Таких значимых фрагментов необходимо столько, чтобы можно было определит лишь контуры объекта, и этого вполне достаточно, чтобы отличить один вид объекта от другого и сделать соответствующие выводы об исходящей от них опасности. Быстродействие можно повысить и за счет ограничения количества обрабатываемых фрагментов, выбирая их с заданным шагом.
Допускается также проводить расчет взаимокорреляционной функции в области смещения Δ, определенной при обработке предыдущей пары цифровых изображений, что также сокращает время обработки.
При предварительном определении калибровочного трехмерного распределения смещений Δ для случая фоновых объектов, заведомо удаленных на значительное расстояние от контролируемой области, и вычитании данного калибровочного распределения из текущего появляется возможность в значительной мере учесть нетождественность оптических трактов регистрации и аберрационные искажения.
Случаи отсутствия искомых фрагментов опорного изображения в сравниваемом изображении соответствуют выходу объекта или его фрагмента из контролируемой области, которая начинается после ближайшей мертвой зоны и заканчивается границей фоновых объектов, которые могут создавать затенение искомых объектов. Затенение объекта также возможно другими объектами из группы, однако оно носит редкий (из-за возможности затенения только в выделенном направлении) и кратковременный (из-за движения объектов) характер. При непрерывном слежении за группой объектов вышеуказанные затенения будут восприниматься как локальная кратковременная потеря цели.
Заявляемый способ вполне реализуем, т.к. применяемые технические средства уже освоены промышленностью развитых стран. Создание программного обеспечения также является вполне решаемой задачей, т.к. способы обработки изображений на сегодняшний день также проработаны.
Использование способа повысит надежность и эффективность современных средств обнаружения тех объектов, для которых принимаются различные меры скрытного появления в зонах контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ НА ВЫСОКОКОНТРАСТНОМ ДИНАМИЧЕСКИ ИЗМЕНЯЕМОМ ФОНЕ | 2014 |
|
RU2576471C2 |
| СПОСОБ СЕЛЕКЦИИ ПО ДАЛЬНОСТИ МНОЖЕСТВЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2498336C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383900C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ ОПТИЧЕСКИМИ СИСТЕМАМИ С ВОЗДУШНОГО НОСИТЕЛЯ | 2019 |
|
RU2714701C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЦЕЛЕЙ НА ОСНОВЕ РЕГИСТРАЦИИ И ОБРАБОТКИ ХОДА ЛУЧЕЙ ОТ ОБЪЕКТОВ В НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2760845C1 |
| Способ локализации появления цели среди стационарных объектов с движущегося носителя | 2024 |
|
RU2834194C1 |
Изобретение относится к оптическим способам обнаружения посторонних объектов на сложном динамически изменяемом фоне в контролируемой зоне. Техническим результатом изобретения является повышение точности обнаружения объектов при одновременном увеличении быстродействия и обзорности. Способ заключается в приеме и формировании двух изображений в двух пространственно разнесенных точках и одномоментной регистрации каждого фрагмента опорного и сравниваемого цифровых изображений двумя идентичными видеосистемами. Каждая из видеосистем выполнена на основе многоэлементного высокоскоростного фотоприемника, например CMOS-матрицы, и содержит объектив. Обе видеосистемы предварительно фиксируют на небольшом, по сравнению с удалением от предполагаемого места появления объекта, расстоянии между собой параллельно друг другу с направлением на контролируемое пространство. Анализ изображений проводят при помощи определения величин смещения Δ характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного при максимально возможном их совпадении в направлении параллактического смещения с последующим выявлением селектируемых и фоновых объектов из полученных смещений Δ. На основе полученных смещений Δ могут быть построены трехмерные изображения объектов и определены расстояния до каждого из них. 5 з.п. ф-лы, 3 ил.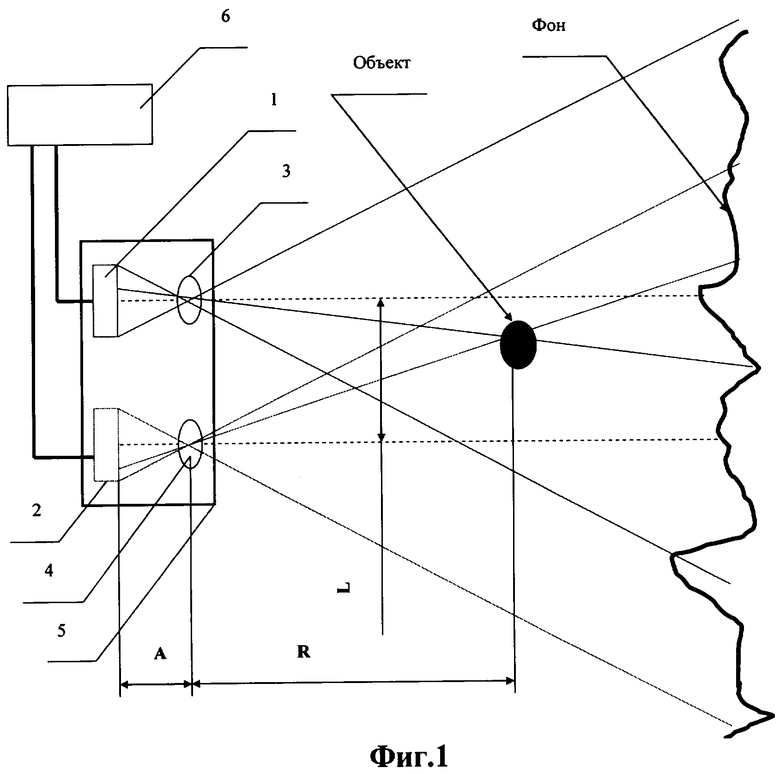
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 1986 |
|
RU2107929C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| US 5543917 A, 06.08.1996 | |||
| JP 9035048 A, 07.02.1997. | |||

