Изобретение относится к области оптической локации, преимущественно пассивной, и может быть использовано в бортовых авиационных локационных комплексах, в т.ч. на беспилотных летательных аппаратах, для обнаружения воздушных объектов на удаленном фоне.
Известен способ селекции объектов на удаленном фоне [патент РФ №2363018 МПК G01S 17/06, опуб. 27.07 2009 г.], заключающийся в приеме и формировании двух изображений установленными в пространственно разнесенных точках двумя идентичными оптическими системами с параллельными главными оптическими осями, одновременной регистрации сформированных изображений, формировании разностного изображения из двух зарегистрированных изображений и анализе разностного изображения. В данном способе для повышения точности обнаружения (селекции) одного или более объектов заранее неизвестной яркости в условиях высококонтрастных сравнительно близко расположенных на разных расстояниях фоновых объектов изображения регистрируют двумя видеосистемами на основе многоэлементных высокоскоростных фотоприемников, например CMOS матриц. Первое из разностных изображений формируют вычитанием сравниваемого изображения из опорного изображения, а второе разностное изображение - вычитанием опорного изображения из сравниваемого, обнуляют отрицательные значения в разностных изображениях. После чего координатам каждого ненулевого фрагмента на первом разностном изображении ставят в соответствие величину сдвига между указанным фрагментом и соответствующим ему фрагментом на втором разностном изображении, до максимального их совпадения в направлении параллактического смещения фона. Если таковой фрагмент на втором разностном изображении в указанном направлении присутствует, аналогично координатам каждого ненулевого фрагмента на втором разностном изображении ставят в соответствие величину сдвига между указанным фрагментом и соответствующим ему фрагментом на первом разностном изображении. Вычисляют расстояния до выявленных объектов по формуле R=L⋅A/Δi, где L - расстояние между центрами объективов видеосистем, А - расстояние от видеоматрицы до главной оптической оси объектива видеосистемы, Δi - величина параллактического сдвига i-го изображения объекта. Достоинством данного способа является возможность селекции объектов на удаленном фоне и возможность оценки расстояния до объекта.
Известен способ селекции объекта на удаленном фоне [патент РФ №2081435, МПК G01S 17/00, опуб. 10.06.1997 г.], принятый за прототип. Известный способ заключается в приеме и формировании двух изображений, которые осуществляют в двух пространственно разнесенных точках двумя идентичными оптическими системами с параллельными главными оптическими осями, одновременной регистрации сформированных изображений, формировании разностного изображения из двух зарегистрированных изображений и анализе разностного изображения. В известном техническом решении осуществляют смещение первого из зарегистрированных изображений на величину параллактического смещения фона в направлении, противоположном этому смещению, разностное изображение получают путем вычитания смещенного и второго зарегистрированных изображений, разделяют области разностного изображения, имеющие противоположные знаки, определяют величину параллактического смещения путем выявления максимального из размеров фрагментов областей в направлении параллактического смещения фона, определяют координаты границ выделенных фрагментов разностного изображения, изменяют координаты одного из выделенных фрагментов на величину параллактического смещения по направлению к другому фрагменту и получают изображение объекта дифрагмированием соответствующего зарегистрированного изображения полем прозрачности равным области, ограниченной внешними границами одного выделенного фрагмента и другого с измененными координатами. Достоинством данного способа является возможность селекции объектов на удаленном фоне и возможность оценки расстояния до объекта.
Недостатками известных устройств является чувствительность результатов селекции объекта на удаленном фоне к возможному изменению ориентации и положения оптических систем относительно друг друга, что весьма вероятно при размещении оптических систем на подвижном носителе, особенно, воздушном. Последнее, из вышеописанных устройств, было выбрано в качестве прототипа.
Задачей и техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение стабилизации изображений и сохранение работоспособности оптических систем в условиях динамических воздействий на базис установки их на воздушном носителе.
Указанный технический результат достигается тем, что в способе селекции объекта на удаленном фоне оптическими системами с воздушного носителя, заключающийся в приеме излучения двумя идентичными оптическими системами с параллельными главными оптическими осями и формировании двух изображений, которые осуществляют в двух пространственно разнесенных точках, одновременной регистрации сформированных изображений, формировании разностного изображения из двух зарегистрированных изображений и анализе разностного изображения, согласно изобретения при формировании изображений в поле зрения каждой оптической системы помещают не менее одного калибровочного маркера, а перед формированием разностного изображения определяют смещение изображений указанных маркеров, на основании которого корректируют зарегистрированные изображения на текущий поворот и соответствующее их смещение, вызванное динамическим воздействием на воздушный носитель, при этом при анализе разностного изображения для селекции объекта по дальности определяют параллактическое смещение двух зарегистрированных изображений.
При динамических воздействиях на воздушный носитель весьма вероятно изменение относительного положения оптических систем, например, изменение их угловой ориентации, при которой метод стереоскопического сравнения изображений вдоль стереобазиса оптических систем будет неэффективен и неработоспособен. Необходимая стабилизация изображений в условиях динамических воздействий на базис установки оптических систем на воздушном носителе и сохранение работоспособности оптических систем (их устойчивость к динамическим воздействиям) может быть обеспечена тем, что при формировании изображений в поле зрения каждой оптической системы помещают не менее одного калибровочного маркера, смещение которого при динамическом воздействии на воздушный носитель учитывают и на основании указанного смещения корректируют зарегистрированные искаженные, вызванные динамическим воздействием на воздушный носитель, изображения на текущий поворот и соответствующее их смещение. А корректировка изображений позволяет сформировать изображения, подлежащие дальнейшей обработки - формированию разностного изображения и определению при анализе разностного изображения параллактического смещения двух зарегистрированных изображений для селекции объекта по дальности. Для облегчения обработки изображений калибровочные маркеры желательно выполнить в виде точечных источников света, например, в виде светодиодов.
С целью расширение эксплуатационных возможностей для обнаружения целей над подстилающей поверхностью оптические системы могут быть установлены на лонжеронах крыльев носителя в направлении его полета, либо в элементах оперения носителя в направлении его полета, либо в обтекателях на законцовках крыльев носителя в направлении его полета, либо вдоль фюзеляжа носителя под углом к направлению его полета.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Способ иллюстрируется следующими чертежами:
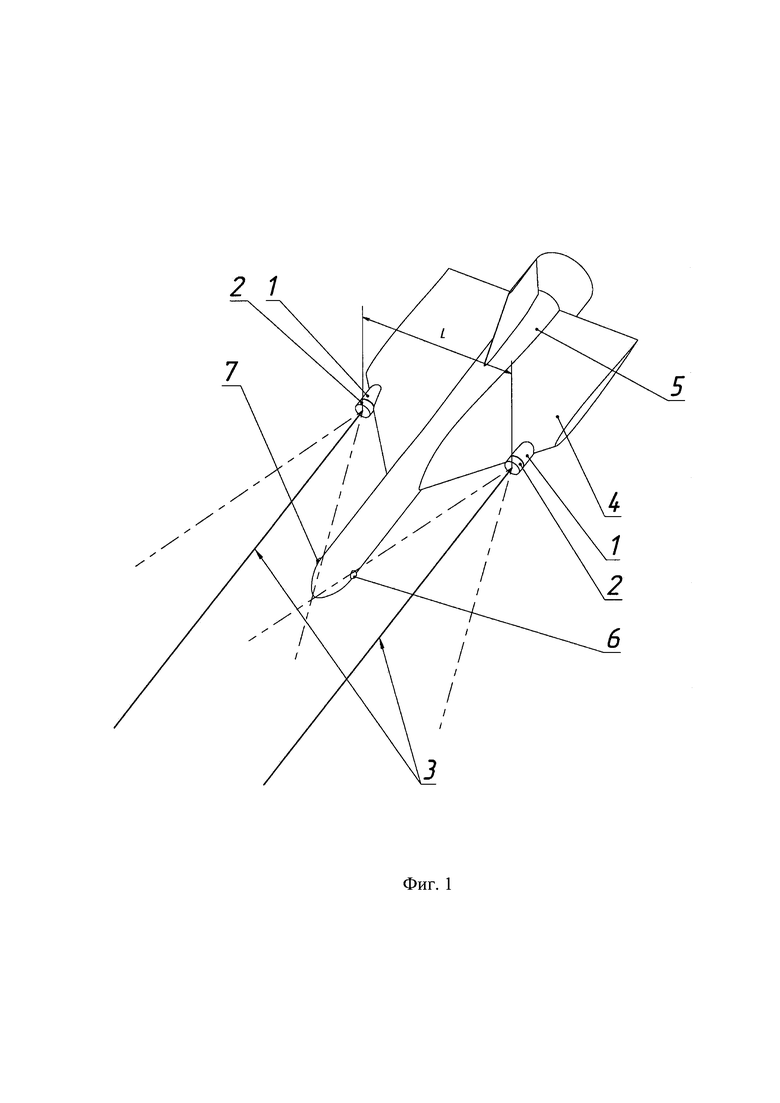
на фиг. 1 показана реализующая способ схема носителя с оптическими системами, установленными на лонжеронах крыльев;
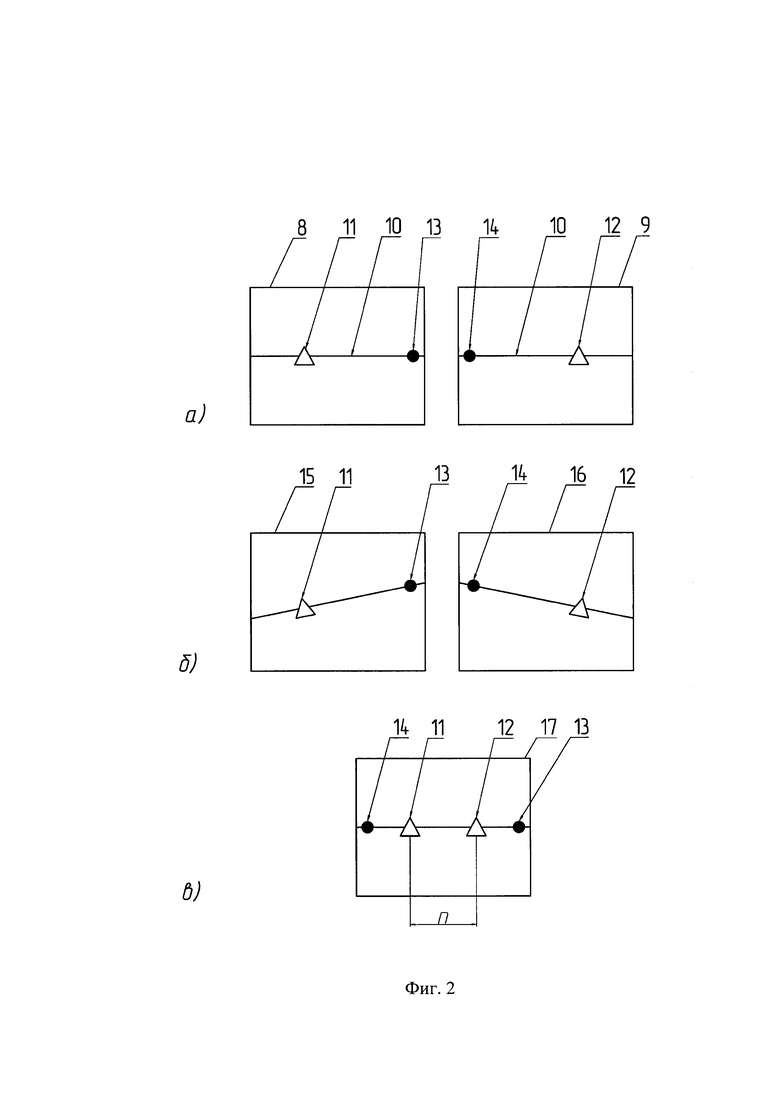
на фиг. 2 показаны этапы осуществления способа;
на фиг. 3 показана схема носителя с оптическими системами, установленными в элементах оперения носителя;
на фиг. 4 показана схема носителя с оптическими системами, установленными на законцовках крыльев носителя;
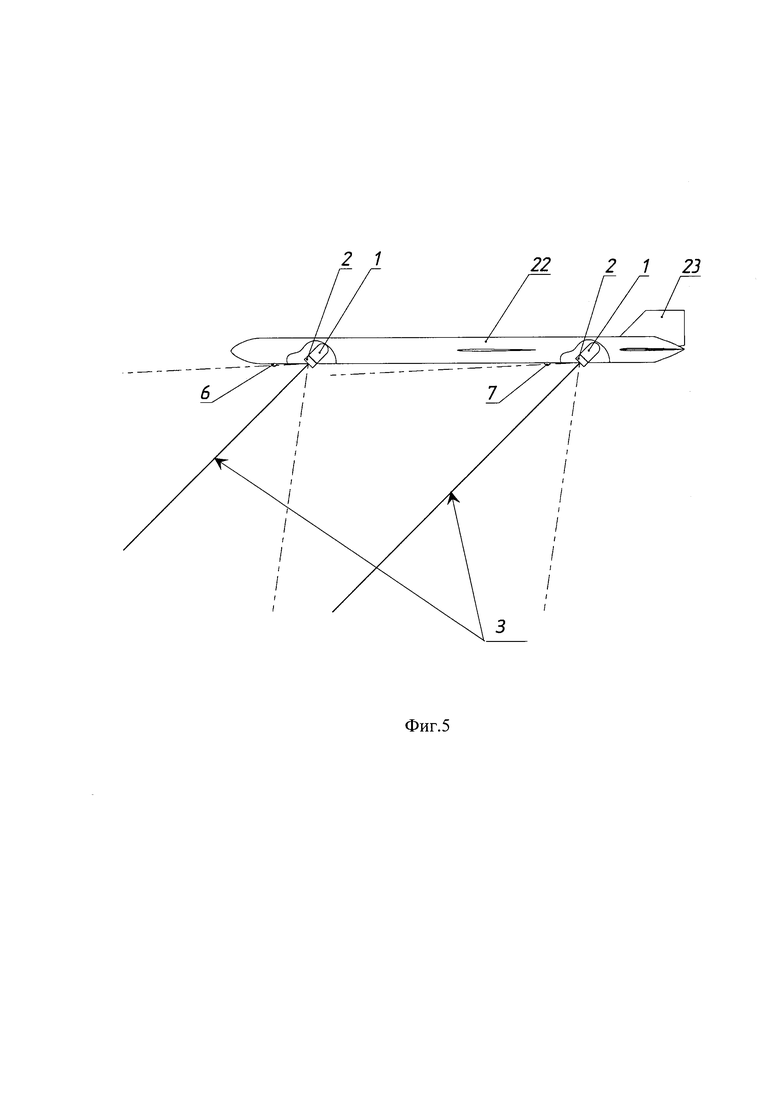
на фиг. 5 показана схема носителя с оптическими системами, установленными вдоль фюзеляжа носителя под углом к направлению его полета.
Способ реализуется следующим образом.
Способ селекции объекта на удаленном фоне (фиг. 1-2) заключается в приеме излучения двумя идентичными оптическими системами 1 с объективами 2, главные оптические оси 3 которых параллельны друг другу. Оптическими системами 1, установленными, например, в лонжеронах 4 носителя 5, имеющего точечные источники света 6, 7, формируют два исходных изображения 8, 9 (фиг. 2а, в случае отсутствия динамических воздействий на воздушный носитель), которые осуществляют в двух пространственно разнесенных точках с одновременной регистрацией сформированных изображений 11, 12. На изображениях 8 и 9 присутствуют изображение удаленного фона 10 (должно совпадать на обоих изображениях) и изображения 11, 12 объекта.
При формировании изображений 8, 9 в поле зрения каждой оптической системы 1 помещают изображения двух калибровочных маркеров 13, 14 от точечных источников света 6, 7. При этом положение изображений 13, 14 соответствует исходным предполетным настройкам систем 1. Для увеличения дальности селекции объекта необходимо обеспечить максимально возможное пространственное разнесение L (см. фиг. 1) оптических систем 1. Затем регистрируют искаженные в результате динамического воздействия на воздушный носитель изображения 15, 16 (фиг. 2б), формируют и анализируют разностное изображение из двух зарегистрированных изображений 15, 16.
Совмещая изображения маркеров 13, 14 на изображениях 15, 16 (фиг. 2б) с исходным положением (фиг. 2а) регистрируемые изображения 11, 12 приводят к исходному виду (фиг. 2а) с необходимой коррекцией на их текущий поворот и смещение. После совмещения изображений 15 и 16 формируют разностное изображение 17 (фиг. 2в) из двух скорректированных изображений 15 и 16. При анализе разностного изображения для селекции объекта по дальности определяют параллактическое смещение двух зарегистрированных изображений 15, 16. На изображении 17 будет отсутствовать удаленный фон 10, а изображения калибровочных источников 6, 7 не учитываются (исключаются). На изображении 17 останутся только изображения 11, 12 объекта, смещенные друг относительно друга на величину стереоскопического смещения п, по которому и определяют дистанцию до объекта.
У ряда носителей (например, ракет) отсутствуют развитые аэродинамические поверхности (крылья), поэтому возможно разместить оптические системы 1 на элементах оперения 18 носителя 19 (см. фиг. 3).
В ряде носителей удобно размещать оптические системы 1 в обтекателях 20 на законцовках крыльев носителя 21 (см. фиг. 4).
В случае поиска и наведения на наземные или низколетящие объекты возможно размещение оптических систем 1 вдоль фюзеляжа 22 носителя 23 (см. фиг. 5) с направлением оптических осей 3 объективов 2 под углом к направлению полета носителя 23. Такое решение в ряде случаев позволяет увеличить пространственное разнесение L оптических систем 1.
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявляемый способ при его осуществлении, относится к области оптической локации, преимущественно пассивной, и может быть использовано в бортовых авиационных локационных комплексах, в т.ч. на беспилотных летательных аппаратах, для обнаружения воздушных объектов на удаленном фоне;
- обеспечение стабилизации изображений и сохранение работоспособности оптических систем в условиях динамических воздействий на базис установки их на носителе;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СПОСОБ СЕЛЕКЦИИ ПО ДАЛЬНОСТИ МНОЖЕСТВЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2498336C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383900C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2008 |
|
RU2383902C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |
| Способ локализации появления цели среди стационарных объектов с движущегося носителя | 2024 |
|
RU2834194C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ НА ВЫСОКОКОНТРАСТНОМ ДИНАМИЧЕСКИ ИЗМЕНЯЕМОМ ФОНЕ | 2014 |
|
RU2576471C2 |


Изобретение относится к области оптической локации, преимущественно пассивной, и может быть использовано в бортовых авиационных локационных комплексах, в том числе на беспилотных летательных аппаратах, для обнаружения воздушных объектов на удаленном фоне. Способ селекции объекта на удаленном фоне оптическими системами с воздушного носителя заключается в приеме излучения двумя идентичными оптическими системами с параллельными главными оптическими осями и формировании двух изображений, которые осуществляют в двух пространственно разнесенных точках, одновременной регистрации сформированных изображений, формировании разностного изображения из двух зарегистрированных изображений и анализе разностного изображения. При формировании изображений в поле зрения каждой оптической системы помещают не менее одного калибровочного маркера. Перед формированием разностного изображения определяют смещение изображений указанных маркеров, на основании которого корректируют зарегистрированные изображения на текущий поворот и соответствующее их смещение, вызванное динамическим воздействием на воздушный носитель. При анализе разностного изображения для селекции объекта по дальности определяют параллактическое смещение двух зарегистрированных изображений. Технический результат - обеспечение стабилизации изображений и сохранение работоспособности оптических систем в условиях динамических воздействий на базис установки их на воздушном носителе. 5 з.п. ф-лы, 5 ил.
1. Способ селекции объекта на удаленном фоне оптическими системами с воздушного носителя, заключающийся в приеме излучения двумя идентичными оптическими системами с параллельными главными оптическими осями и формировании двух изображений, которые осуществляют в двух пространственно разнесенных точках, одновременной регистрации сформированных изображений, формировании разностного изображения из двух зарегистрированных изображений и анализе разностного изображения, отличающийся тем, что при формировании изображений в поле зрения каждой оптической системы помещают не менее одного калибровочного маркера, а перед формированием разностного изображения определяют смещение изображений указанных маркеров, на основании которого корректируют зарегистрированные изображения на текущий поворот и соответствующее их смещение, вызванное динамическим воздействием на воздушный носитель, при этом при анализе разностного изображения для селекции объекта по дальности определяют параллактическое смещение двух зарегистрированных изображений.
2. Способ по п. 1, отличающийся тем, что калибровочный маркер выполнен в виде точечного источника света.
3. Способ по п. 1, отличающийся тем, что оптические системы устанавливают на лонжеронах крыльев носителя в направлении его полета.
4. Способ по п. 1, отличающийся тем, что оптические системы устанавливают в элементах оперения носителя в направлении его полета.
5. Способ по п. 1, отличающийся тем, что оптические системы устанавливают в обтекателях на законцовках крыльев носителя в направлении его полета.
6. Способ по п. 1, отличающийся тем, что оптические системы устанавливают вдоль фюзеляжа носителя под углом к направлению его полета.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |
| СИСТЕМЫ И СПОСОБЫ ОТСЛЕЖИВАНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЦЕЛЕВОГО ОБЪЕКТА | 2014 |
|
RU2664257C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ НА ВЫСОКОКОНТРАСТНОМ ДИНАМИЧЕСКИ ИЗМЕНЯЕМОМ ФОНЕ | 2014 |
|
RU2576471C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| KR 2017127103 A, 21.11.2017 | |||
| JP 2009014481 A, 22.01.2009 | |||
| US 20180180740 A1, 28.06.2018 | |||
| WO 2007090288 A1, 16.08.2007. | |||

