Предлагаемое изобретение относится к судостроению, в частности к системам управления движением скоростных судов с динамическими принципами поддержания, например к системам управления движением судов на подводных крыльях, воздушной подушке или с воздушной каверной.
Известна система автоматического управления судном на подводных крыльях, содержащая один центральный вычислитель, связанный через первую группу переключающих элементов с группой автономных вычислителей, воздействующих на группу исполнительных приводов рулевых поверхностей судна по числу автономных вычислителей через вторую группу переключающих элементов. Информация о состоянии и параметрах движения судна снимается с соответствующих датчиков, общих для всех вычислителей системы [см. патент РФ на изобретение №2081780 от 11.05.1994 г. «Система автоматического управления судном на подводных крыльях»].
В известной системе центральный вычислитель и автономные вычислители подстраховывают друг друга при отказах.
Однако известная система обладает тем недостатком, что в случае отказа какого-либо датчика система перестает выполнять часть своих функций по управлению движением судна.
Известна также система автоматического управления скоростным судном, содержащая пульт индикации и управления, связанный с двумя группами вычислителей, подключенных к датчикам динамических перемещений судна и управляющих двумя группами соответственно носовых и кормовых двухканальных исполнительных приводов рулевых поверхностей судна. Из пары дублирующих друг друга вычислителей одной группы каждый вычислитель подключен, по меньшей мере, к одному из вычислителей аналогичной пары другой группы и к соответствующей группе из двух дублирующих друг друга датчиков с образованием самостоятельного канала управления приводами всех рулевых поверхностей судна [см. патент РФ на изобретение №2085430 от 08.08.1995 г. «Система автоматического управления скоростным судном»].
В известной системе парируется отказ одного любого вычислителя и любого датчика судна.
Известная система обладает недостаточной отказоустойчивостью, поскольку при наличии в системе четырех дублирующих друг друга вычислителей она сохраняет работоспособность не при любых двух одновременно отказавших вычислителях, а только если один из них принадлежит к носовой группе, а другой - к кормовой. Кроме того, недостатком известной системы является то, что в случае отказа любого датчика система переходит на одноканальное управление исполнительными приводами, обеспечивающее безопасность плавания, но обладающее ухудшенными динамическими характеристиками.
По совокупности сходных существенных признаков наиболее близким к предложенному изобретению является система автоматического управления скоростным судном, содержащая пульт индикации и управления, две дублирующих друг друга группы датчиков динамических перемещений судна и положения органов управления системы, группы носовых и кормовых двухканальных исполнительных приводов рулевых поверхностей судна и не менее двух дублирующих друг друга вычислителей управления, связанных между собой двумя сетевыми каналами связи [см. патент РФ на полезную модель №57028 от 19.04.2006 г. «Система автоматического управления скоростным судном»].
Известная система предназначена для управления движением скоростных судов не только в автоматических, но и ручных режимах, и обладает повышенной отказоустойчивостью и живучестью за счет дублирования не только каналов связи, но и вычислителей управления.
Однако данная система имеет недостаток, заключающийся в том, что к дублированным сетевым каналам связи подключены все абоненты сетевой структуры, что не исключает возможности блокировки одновременно двух дублирующих друг друга сетевых каналов связи из-за единичного отказа в системе.
Перед заявленным изобретением была поставлена задача повышения безопасности, отказоустойчивости и живучести системы управления движением для скоростных судов.
Поставленная задача решается тем, что предложена система управления движением для скоростных судов, содержащая пульт индикации и управления с видеоконтроллером, две дублирующие друг друга группы датчиков динамических перемещений судна и положения органов управления системы, группы носовых и кормовых двухканальных исполнительных приводов рулевых поверхностей судна и два дублирующих друг друга вычислителя нижнего уровня управления, связанные между собой двумя сетевыми каналами связи.
Новым в предложенной системе является то, что каждый из вычислителей управления подключен к соответствующим датчикам, входам двухканальных исполнительных приводов системы, соответствующим входам видеоконтроллера пульта индикации и управления, а также к внешним системам и друг к другу радиальными каналами связи через соответствующий неблокирующий коммутатор транзакций. При этом неблокирующий коммутатор транзакций выполнен на основе программируемой пользователем вентильной матрицы FPGA, содержащей IP-блоки ядер интерфейсов CAN и UART, адаптированные на прием сообщений по стандарту NMEA-0183 (IEC 61162), а также неблокирующий коммутатор и IP-ядро интерфейса шины FMC Slave, связанное с управляющим микроконтроллером на базе ядра ARM через интерфейс шины FMC Master. Дублирующие друг друга вычислители управления размещены в пульте индикации и управления и подключены по входам разовых команд к соответствующим микропереключателям сдвоенных кнопок управления пульта индикации и управления. Вычислитель с видеоконтроллером пульта индикации и управления дополнительно выполняет функции автомата безопасности системы на верхнем уровне управления и подключен к шине аварийных и предупредительных сигналов.
Технический результат состоит в повышении безопасности, отказоустойчивости и живучести системы за счет исключения возможности блокировки одновременно двух дублирующих друг друга сетевых каналов связи из-за единичного отказа в системе, а также за счет введения в систему верхнего уровня управления.
На чертеже представлена функциональная блок-схема заявленной системы.
Заявленная система (см. чертеж) содержит пульт индикации и управления 1, группы 2 и 3 дублирующих друг друга датчиков 4 динамических перемещений судна и положения органов управления системы (например, гирокомпас, лаг, спутниковая навигационная система, БИНС, датчик положения штурвала), носовую 5 и кормовую 6 группы двухканальных исполнительных приводов 7 (например, рулей и закрылков судна на подводных крыльях), дублирующие друг друга вычислители нижнего уровня управления 8, сетевые каналы связи 9 (CAN), вычислитель с видеоконтроллером 10 пульта индикации и управления 1 с функциями автомата безопасности системы, подключенного к шине аварийных и предупредительных сигналов, радиальные каналы связи 11 (CAN или RS422), неблокирующий коммутатор транзакций 12, шину разовых команд 13 от сдвоенных кнопок управления пульта индикации и управления (на чертеже не показаны), шину аварийных и предупредительных сигналов 14 (стопорения закрылков, включения и отключения рулевых агрегатов, экстренного сброса оборотов двигателей, сигналов контроля дееспособности вахтенного помощника капитана). Каждый из вычислителей управления подключен к неблокирующему коммутатору транзакций 12 с помощью сетевого канала связи 9. Группы 2 и 3 датчиков 4 системы, двухканальные исполнительные приводы 7 носовой и кормовой групп 5 и 6, внешние системы (например, интегрированный мостик или регистратор данных рейса на чертеже не показаны), вычислитель с видеоконтроллером 10 подключены радиальными каналами связи 11 (CAN или RS422) к неблокирующим коммутаторам транзакций 12, также соединенными между собой каналом связи 11.
Система работает следующим образом.
Режим управления движением судна задается судоводителем кнопками с пульта индикации и управления 1 соответствующей командой, содержащей заданные значения параметров управления, одновременно обоими подключенными шинами 13 к кнопкам пульта индикации и управления 1 вычислителям управления 8. Вычислители управления 8 принимают от датчиков 4 и исполнительных приводов 7 системы через неблокирующие коммутаторы транзакций 12 по каналам связи 11 и 9 информацию о параметрах движения судна, положении рулевых поверхностей судна и состоянии системы управления. При этом каждый из вычислителей 8 по информации с датчиков 4 системы формирует законы управления для всех двухканальных исполнительных приводов 7 как носовой 5, так и кормовой 6 групп рулевых поверхностей судна. Результаты расчетов заданного положения управляющих поверхностей судна от каждого из вычислителей 8 передаются через неблокирующие коммутаторы транзакций 12 по каналам связи 9 и 11 в соответствующие исполнительные приводы 7.
При отсутствии отказов управление приводами 7 носовой и кормовой групп 5 и 6 рулевых поверхностей судна ведется по двухканальной схеме через оба входа каждого привода 7. Контроллеры исполнительных приводов 7 (на чертеже не показаны) с целью контроля осуществляют сравнение результатов расчетов вычислителей 8 между собой и при длительном их несовпадении делается вывод об отказе вычислителей 8, а информация с них перестает использоваться для управления приводами 7 с выдачей соответствующей информации о состоянии системы на пульт индикации и управления 1. Указанная длительность несовпадения расчетов задается для каждого конкретного судна в зависимости от его динамических характеристик. При отказе дублирующих элементов сетевой структуры системы: вычислителей 8, датчиков 4, сетевых каналов связи 9 или неблокирующих коммутаторов транзакций 12 - система переходит на одноканальное управление приводами 7 рулей с выдачей соответствующей информации о состоянии системы на пульт индикации и управления 1, закрылки при этом стопорятся по сигналам на шине 14 вычислителя с видеоконтроллером 10, выполняющего функции автомата безопасности системы.
Суть работы неблокирующего коммутатора транзакций 12 сводится к передаче и приему транзакций (сообщений) от соответствующего вычислителя управления 8 к исполнительным устройствам (приводам 7, датчикам 4) и обратно посредством обмена информацией с вычислителем управления 8 по унифицированному транспортному протоколу. Микроконтроллер на базе ядра ARM (на чертеже не показан) принимает и передает транзакции от исполнительных устройств внешних систем (на чертеже не показаны) в соответствии с их транспортными протоколами, преобразует в унифицированные пакеты и принимает / передает соответствующему вычислителю управления 8. Вычислитель управления 8 может «видеть» все исполнительные устройства одновременно, но устройства «видят» только управляющий микроконтроллер ARM. Благодаря подключению исполнительных устройств по топологии «звезда» в сравнении с топологией «общая шина» повышается скорость обмена информацией, увеличивается отказоустойчивость при выходе из строя любого исполнительного устройства.
Унифицированный транспортный протокол сокращает время разработки программного обеспечения верхнего уровня, так как не требуется разработка планировщика обработки множества асинхронных транзакций. Использование FPGA с необходимым количеством IP-ядер интерфейсов позволяет избежать разработки многопроцессорных вычислительных модулей, что также положительно сказывается на отказоустойчивости системы в целом.
Таким образом, суть реализованной в изобретении системы управления движением для скоростных судов заключается в использовании вместо двух дублирующих друг друга сетевых каналов связи, к каждому из которых подключены все абоненты дублированной сетевой структуры, радиальных связей между дублирующими друг друга вычислителями управления и абонентами сети через неблокирующие коммутаторы транзакций. При этом исключается возможность неработоспособности заявленной дублированной сетевой структуры системы управления при единичных отказах, что немаловажно для обеспечения безопасности плавания быстроходных судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМ СУДНОМ | 1995 |
|
RU2085430C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2428350C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2527570C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2503581C2 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
Система для управления движением для скоростных судов содержит пульт индикации и управления с видеоконтроллером, две группы датчиков динамических перемещений судна положения органов управления, носовые и кормовые двухканальные исполнительные приводы рулевых поверхностей судна, два вычислителя нижнего управления, размещенные в пульте индикации и управления, неблокирующий коммутатор транзакций на основе программируемой пользователем вентильной матрицы FPGA, соединенные определенным образом радиальными каналами связи. Обеспечивается повышение безопасности, отказоустойчивости и живучести системы управления движением судна. 3 з.п. ф-лы, 1 ил.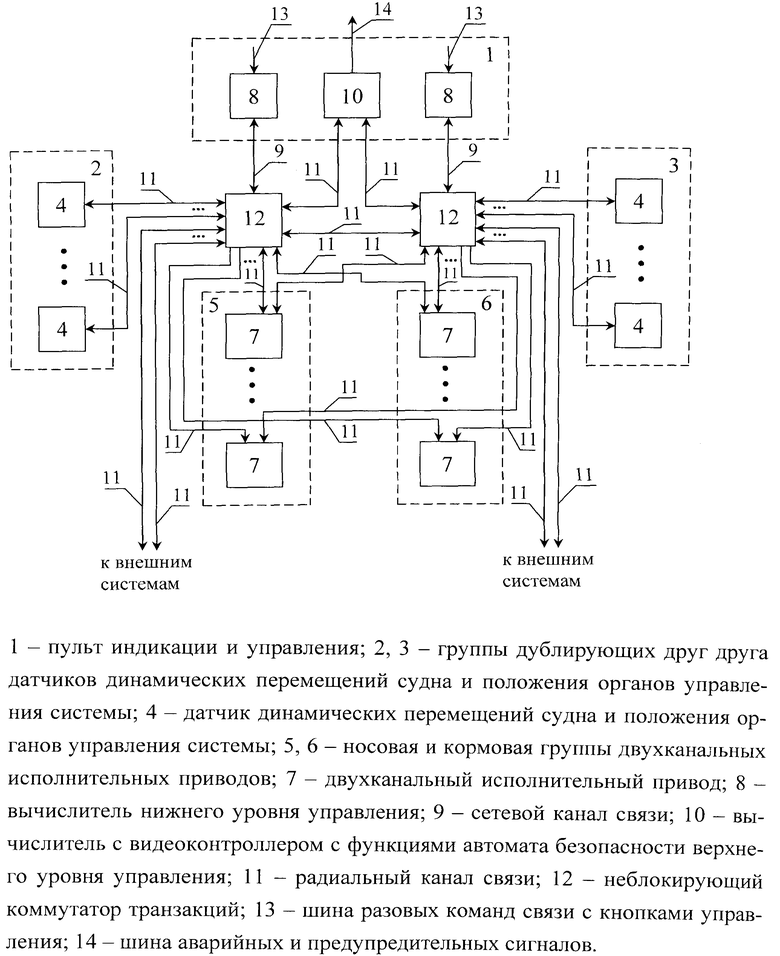
1. Система управления движением для скоростных судов, содержащая пульт индикации и управления с видеоконтроллером, две дублирующие друг друга группы датчиков динамических перемещений судна и положения органов управления системы, группы носовых и кормовых двухканальных исполнительных приводов рулевых поверхностей судна и два дублирующих друг друга вычислителя нижнего уровня управления, связанные между собой двумя сетевыми каналами связи, отличающаяся тем, что каждый из вычислителей управления подключен к соответствующим датчикам, входам двухканальных исполнительных приводов системы, соответствующим входам видеоконтроллера пульта индикации и управления, а также к внешним системам и друг к другу радиальными каналами связи через соответствующий неблокирующий коммутатор транзакций.
2. Система по п. 1, отличающаяся тем, что неблокирующий коммутатор транзакций выполнен на основе программируемой пользователем вентильной матрицы FPGA, содержащей IP блоки ядер транспортного уровня интерфейсов CAN и UART, адаптированные под прием сообщений по стандарту NMEA-0183 (IEC 61162), а также неблокирующий коммутатор и IP-ядро интерфейса шины FMC Slave, связанное с управляющим микроконтроллером на базе ядра ARM через интерфейс шины FMC Master.
3. Система по п. 1, отличающаяся тем, что дублирующие друг друга вычислители управления размещены в пульте индикации и управления и подключены по входам разовых команд к соответствующим микропереключателям сдвоенных кнопок управления пульта индикации и управления.
4. Система по п. 1, отличающаяся тем, что вычислитель с видеоконтроллером пульта индикации и управления дополнительно выполняет функции автомата безопасности системы на верхнем уровне управления и подключен к шине аварийных и предупредительных сигналов.
| Способ очистки фосфорной кислоты от мышьяка | 1938 |
|
SU55734A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМ СУДНОМ | 1995 |
|
RU2085430C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |
| US 4178871 A1, 18.12.1979.. | |||

