Область техники
Изобретение относится к области авиационного приборостроения и может быть использовано в комплексах бортового радиоэлектронного оборудования (БРЭО) самолетов малой авиации.
Уровень техники
Известен автопилот для учебно-тренировочного самолета, описанный в патенте РФ на полезную модель №191643, МПК В64С 13/16, опубл. 14.08.2019, содержащий вычислитель управления, подключенный первым каналом информационного обмена к сервоприводам руля высоты, элеронов, руля направления и триммера руля высоты, а вторым каналом информационного обмена - к одному или двум многофункциональным индикаторам, комплекту аппаратуры ближней навигации и посадки VOR/ILS/маркерного приемника/автоматического радиокомпаса и радиовысотомеру, взаимодействующей с автопилотом аппаратуры комплекса БРЭО. При этом вычислитель управления выполнен двухканальным и содержит два одновременно работающих и дублирующих друг друга вычислительных модуля с автономными модулями вторичного электропитания, подключенными к самолетной системе электроснабжения постоянного тока с двух бортов, каждый из вычислительных модулей связан с другим вычислительным модулем внутренним каналом информационного обмена по интерфейсу RS-422 и с сервоприводами руля высоты, элеронов, руля направления и триммера руля высоты по двум интерфейсам CAN (ARINC-825) и разовым командам первого канала информационного обмена, а также с датчиками пилотажной и навигационной информации и многофункциональными индикаторами комплекса БРЭО по кодовым линиям связи ARINC-429 и разовым командам второго канала информационного обмена, а электромагнитные муфты сцепления всех сервоприводов запитаны от сети постоянного тока через переключатель на штурвале управления самолета. Для осуществления функциональных задач автопилота требуется наличие многофункциональных индикаторов для отображения в графическом и текстовом виде пилотажно-навигационной и вспомогательной информации, а также задатчики для управления режимами полета. Автопилот обеспечивает выполнение основных режимов и функций автоматической стабилизации короткопериодического и длиннопериодического движения, однако в нем отсутствует информация об ограничениях автопилотом выхода за критические параметры полета.
Недостатком известного технического решения является сложность конструкции высокие требования к составу взаимодействующего оборудования. Кроме того, двухканальная структура автопилота не обеспечивает однозначное определение отказавшего элемента. Критерием отказа таких систем является рассогласование входных/выходных сигналов.
Известна система управления самолетом, изложенная в патенте РФ на изобретение №2482022, МПК В64С 13/00, опубл. 20.05 2013. Система содержит блок интегрального управления по крену, обеспечивающий заданные соответствия между отклонением ручки по крену и угловой скоростью крена. Это позволяет точно ограничивать скорость крена при максимальных отклонениях ручки. Для парирования моментов крена от срывных явлений, возникающих при больших углах атаки и в трансзвуковой зоне полета, используется блок компенсации возмущений по крену. Характеристики устойчивости и управляемости самолета по рысканию улучшаются введением блока интегрального управления по рысканию. Данная система автоматического управления характеризуется расширенными функциональными возможностями и обеспечивает улучшение характеристики продольного движения за счет учета оценки продольной устойчивости самолета и компенсации ее изменения по режимам полета.
Однако данная система не предусматривает отображение графических значений параметров, в частности, в условиях предполетной проверки и полетного контроля.
Известна система автоматического управления полетом самолета по патенту РФ на изобретение №2312793, МПК В64С 13/00, опубл. 20.12.2007, которая содержит дублированный цифровой вычислитель, сервоприводы, включенные параллельно в систему ручного управления рулем высоты, элеронами и рулем направления, сервопривод автомата тяги, рукоятку управления и индикатор усилий. Изобретение обеспечивает оперативную диагностику и контроль с возможностью определение места отказа с точностью до сменного блока.
При этом данная система не предусматривает автоматическое парирование негативных влияний при отказах.
Раскрытие сущности изобретения
Технической проблемой является разработка автопилота при снижении требований к составу взаимодействующего оборудования и упрощении эксплуатации, обеспечение при отказах оперативного вмешательства пилотам в управление и недопущение неконтролируемых отклонений аэродинамических органов управления.
Технический результат заключается в обеспечении отказобезопасности автопилота при улучшении характеристик устойчивости и управляемости самолета и повышении безопасности полета.
Технический результат достигается тем, что автопилот для самолетов малой авиации, содержащий цифровой пульт-вычислитель, размещенный в корпусе и исполнительные механизмы (ИМ) в виде сервоприводов, подключаемые параллельно в систему ручного управления полетом, согласно решению, дополнительно содержит интерфейс пользователя, включающий в себя процессорное ядро и жидкокристаллический индикатор состояния автопилота, отображающий информацию о параметрах полета, и элементы управления параметрами и режимами полета, пульт-вычислитель выполнен одноканальным с внутренним интерфейсом, включающим в себя высокоскоростной последовательный интерфейс, интерфейс обмена информацией с бортовыми системами и цифро-аналоговогого преобразования сигналов постоянного и переменного тока, и двухпроцессорным вычислительным ядром, в котором первый процессор запрограммирован с возможностью реализации алгоритмов управления полетом, а второй – для обеспечения контроля, ИМ представляют собой электромеханические рулевые приводы вращательного типа с встроенной механической муфтой пересиливания и электромагнитной муфтой сцепления/расцепления двигателя; при этом автопилот сопряжен с информационными системами, такими как курсовертикаль, системы воздушных сигналов и навигации.
Автопилот сопряжен с электромеханизмами триммирования, содержит два или три сервопривода, подключенные параллельно в систему ручного управления рулем высоты и элеронами.
Краткое описание чертежей
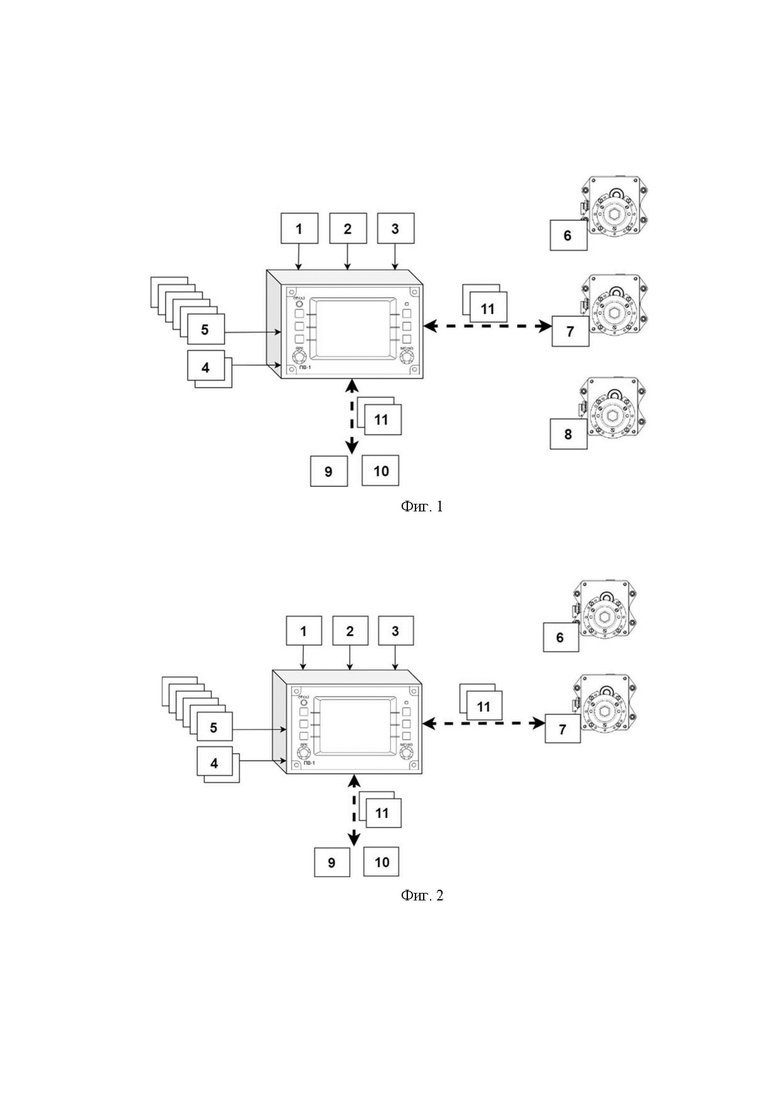
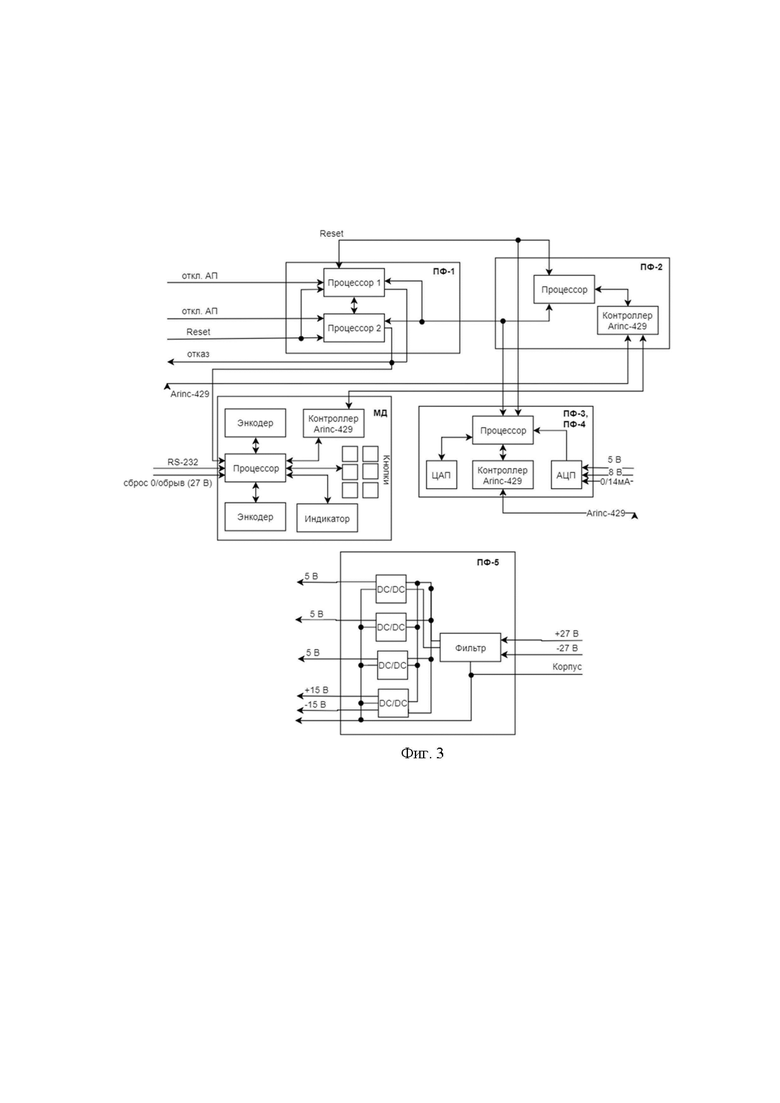
Изобретение поясняется чертежами: на фиг. 1 – приведена структурная схема трехосевого автопилота; на фиг. 2 – двухосевого автопилота АП-МВЛ; на фиг. 3 –структурная схема пульта вычислителя управления полетом (ПВ).
Позициями на чертежах обозначено:
1. корпус;
2. пульт-вычислитель управления полетом;
3. индикатор;
4. энкодер ввода параметров;
5. кнопка управления;
6. сервопривод руля высоты;
7. сервопривод элеронов;
8. сервопривод руля направления;
9. курсовертикаль;
10. системы воздушных сигналов;
11. интерфейсные линии связи.
Осуществление изобретения
Автопилот может быть представлен в следующих комплектациях: трехосевой (фиг. 1) и двухосевой (фиг. 2).
Автопилот (АП) содержит корпус 1, в котором расположены пульт-вычислитель управления полетом 2, индикатор 3, энкодеры 4 и кнопки управления 5, а также сервоприводы 6-8, подключаемые параллельно в систему ручного управления рулем высоты, элеронами и рулем направления. АП сопряжен с информационными системами, в качестве которых используются курсовертикаль 9, системы воздушных сигналов 10, навигации и опционально электромеханизмами триммирования. ПВ 2 выполнен одноканальным с внутренним интерфейсом и двухпроцессорным вычислительным ядром, в котором первый процессор является главным, а второй – контролирующим. ПВ 2 соединен по интерфейсным линиям связи 11 ARINC-429 с сервоприводами (ИМ) 6-8 на каждый канал управления. ИМ 6-8 представляют собой электромеханические сервопривода вращательного типа с встроенной механической муфтой пересиливания и электромагнитной муфтой сцепления/расцепления двигателя. Настраиваемый момент муфты пересиливания, входящей в состав сервоприводов, задается для каждого канала управления отдельно с учетом развиваемых шарнирных моментов аэродинамических поверхностей и недопущения активного перемещения проводки и органов управления при неконтролируемых отказах электронной части сервопривода с выдачей максимального сигнала на вращение выходного вала.
В состав ПВ 2 входят шесть основных конструктивно функциональных модулей. ПВ 2 через модули, представляющие собой платы функциональные ПФ-1, ПФ-2 и ПФ-3, по интерфейсным линиям связи 11 осуществляет взаимодействие с бортовыми информационными датчиками 9 и 10, сервоприводами ИМ 6-8 и т.д.
В качестве средства межмодульного информационного обмена в ПВ 2 применён высокоскоростной последовательный интерфейс, обеспечиваемый процессорами модуля ПФ-1 и процессорами модулей ПФ-2 и ПФ-3.
ПФ-1 – центральный модуль, предназначен для реализации законов управления объектом, определения отказа системы, обеспечения режима предполётного контроля и технологического режима настройки системы управления рулевыми машинами. Модуль ПФ 1 содержит два процессора, каждый из которых запитан от собственного вторичного источника питания 5В. Процессор 1 является главным и на основе его последовательного порта организован межмодульный интерфейс. Процессор 2 является контрольным, и подключен к процессору 1 как один из его абонентов. По скоростному последовательному интерфейсу модуль ПФ-1 связан с модулями ПФ-2 и ПФ-3.
Плата функциональная ПФ-2 содержит процессор, внешнюю байтовую память, ПЛИС, контроллеры ARINC-429. Обмен с модулем ПФ-1 в блоке ПВ осуществляется через последовательный порт.
Плата функциональная ПФ-3 состоит из процессора аналогового интерфейса, цифро-аналогового преобразователя (ЦАП), аналого-цифрового преобразователя (АЦП), формирователя прерываний процессора и контроллера ARINC-429. Плата функциональная ПФ-4 является функциональным расширением ПФ-3 для приема сигналов переменного тока и сигналов постоянного тока от источников тока. Он представляет собой 11-канальный ФЧВ и 5- канальный преобразователь ток-напряжение с мультиплексированным выходом. Первичное питание (шина +27В и шина -27В) заводится на ПФ-5 через фильтр радиопомех.
Плата ПФ-5 построена по схеме с 4-я независимыми источниками питания.
Отображение в графическом и/или текстовом виде пилотажно-навигационной и вспомогательной информации, обеспечение ввода параметров, включение и отключение режимов работы автопилота АП осуществляется средствами модуля дисплейного МД. Модуль дисплейный МД – модуль, имеющий в своем составе процессор, реализующий функции ввода-вывода, вычислителя, ввода параметров и отображения информации. В состав модуля МД помимо процессорного ядра входят: цветной жидкокристаллический индикатор 3, отображающий информацию о параметрах полета, два энкодера ввода параметров 4 и шесть кнопок управления 5, позволяющие пилоту задавать параметры полета, контролировать его работу, отключать и включать автопилот. Обмен с модулем МД осуществляется через ПФ-2 по линиям ARINC-429.
ПФ-2 обеспечивает связь ПВ 2 с бортовыми информационными датчиками, сервоприводами ИМ 6-8 и т.д. по линиям ARINC-429.
ПФ-3 и ПФ-4 обеспечивают аналого-цифровое преобразование сигналов постоянного и переменного тока и цифро-аналоговое преобразование сигналов постоянного тока, а также обмен с бортовыми системами по линиям ARINC-429.
Электропитание ПВ 2 осуществляется от сети постоянного тока +27 В через модуль ПФ-500, содержащий четыре модуля источников питания, запитанных параллельно через фильтр радиопомех.
ПВ 2 предназначен для программно-аппаратной реализации вычислительной подсистемы, которая обеспечивает решение следующих задач:
- контроля входной информации, поступающей от информационных систем;
- решения пилотажных задач;
- выдачи сигналов управления в контроллеры сервоприводов;
- контроля исправности блоков, входящих в состав автопилота.
В трехосевом варианте АП содержится три сервопривода: руля высоты 6; элеронов 7; руля направления 8.
Блоки из состава автопилота выполняют следующие основные функции:
ПВ 2:
прием информации об угловом положении, высоте и скоростях самолета от пилотажно-навигационного оборудования,
прием информации о требуемых (выбранных пилотом) режимах стабилизации,
расчет управляющих параметров ИМ 6-8 для перемещения аэродинамических рулей высоты и направления, элеронов,
формирование и индикация на жидкокристаллическом индикаторе 3 информации о режимах работы АП, а также о состоянии взаимодействующего оборудования при всех видах контроля, в том числе для режимов наземного обслуживания;
непрерывный автоматический полетный контроль и готовности информации от взаимодействующего бортового оборудования,
обеспечение аварийного отключения АП при его отказе и взаимодействующего оборудования,
наземный автоматизированный контроль, при котором определяется готовность блоков, датчиков информации, напряжение электропитания с выдачей сигнализирующей информации.
ИМ 6-8:
перемещение тросовой проводки управления по сигналам ПВ 2,
отключение сервопривода от проводки управления при отказе,
аварийное отключение от проводки управления при сложном отказе (заклинивание привода при неисправности муфты сцепления).
Структура информационных связей бортового оборудования и блоков трехосевого АП представлена на фиг. 1.
В двухосевом варианте АП (фиг. 2) содержится два сервопривода: руля высоты 6; элеронов 7. Опционально двухосевой АП может быть дополнен демпфером руля направления. Автопилот выполнять следующие основные функции:
прием информации об угловом положении, высоте и скоростях самолета от сопряженных информационных системам 9 и 10,
прием информации о требуемых (выбранных пилотом) режимах стабилизации,
расчет управляющих параметров ИМ 6-7 для перемещения руля высоты и элеронов,
формирование и индикация на экране информации о режимах работы АП, а также о состоянии взаимодействующего оборудования при всех видах контроля, в том числе для режимов наземного обслуживания,
непрерывный автоматический полетный контроль и готовности информации от взаимодействующего бортового оборудования,
обеспечение аварийного отключения АП при его отказе и взаимодействующего оборудования,
наземный автоматизированный контроль, при котором определяется готовность блоков, датчиков информации, напряжение электропитания с выдачей сигнализирующей информации,
перемещение тросовой проводки управления по сигналам ПВ 2,
отключение сервопривода от проводки управления при отказе,
аварийное отключение от проводки управления при сложном отказе (заклинивание привода при неисправности муфты сцепления).
Электромеханические рулевые приводы ИМ 6-8 следует отнести к одним из самых важных элементов автопилота АП.
В каждом из вариантов исполнения АП ИМ 6-8 предназначены для перемещения проводки управления самолета по управляющим сигналам в каналах рулей высоты и направления, элеронов. При этом в двухосевом варианте исполнения АП в дополнении к выше озвученных задачам на ИМ 6-7 возлагаются задачи управления и контроля, реализации пилотажных алгоритмов управления, приема и выдачи информации в внешние сопрягаемые системы.
Управление режимами работы АП осуществляется с кнопок 6 ПВ 2.
Каждый вариант исполнения автопилота АП позволяет реализовать следующий перечень режимов:
- автоматическая стабилизация крена, тангажа и курса;
- автоматическая стабилизация барометрической высоты;
- автоматическая стабилизация заданной вертикальной скорости;
- автоматический или директорный выход на заданную высоту эшелона;
- автоматический полёт по сигналам навигационной системы в режиме маршрут или стабилизация путевого угла;
- совмещенное управление;
- выдача в систему электронной индикации и сигнализации информации о текущих режимах работы системы, о готовности системы, аварийном отключении системы или отсутствия готовности трактов управления;
- выдача информации для индикации отклонения директорных планок;
- выдача в систему сигнализации самолета предупреждающих сигналов об отказах и неисправностях в системы.
Опционально может быть реализовано автоматическое и ручное (по команде экипажа) триммирование элеронов, рулей высоты и направления.
Для обеспечения отказобезопасности сервоприводы ИМ 6-8 оснащены защитой от заклинивания выходного звена. Две независимые интерфейсные линии 11 связи ARINC-429 позволяют осуществлять контроль и при необходимости отключать сервопривод.
Обеспечение отказобезопасности автопилота АП достигается применением соответствующей элементной базы, структурой комплекса, организацией наземного и полетного контроля в части определения отказавшего элемента по принципу «канал-модель», обеспечением контурами управления ограничений заданных параметров полета в эксплуатационном диапазоне, применением в каждом приводе электромагнитной муфты и муфты пересиливания, ограничением диапазона отклонений органов управления по сигналам АП. Настраиваемый момент муфты пересиливания в свою очередь выбирается с учетом шарнирных моментов аэродинамических поверхностей с целью недопущения активного перемещения проводки и органов управления при неконтролируемых отказах электронной части сервопривода с выдачей максимального сигнала на вращение выходного вала.
Устройство работает следующим образом.
В качестве органов управления на лицевой панели ПВ 2 используются шесть многофункциональных кнопок 5, расположенными группами по три с левой и с правой стороны жидкокристаллического индикатора и два энкодера 4.
При подаче электропитания на АП, по истечению не более 60 с, включается ПВ 2 и на темном фоне жидкокристаллического индикатора индицируется кадр с отображением диагностической информации, режимов автоматического управления и контроля.
По информации от взаимодействующего оборудования нажатием на кнопку 5 с соответствующим режимом и ее последующей сигнализацией зеленым подсветом на экране ПВ 2 в каналах крена, тангажа, курса и высоты во всем эксплуатационном диапазоне воздушных скоростей и высот обеспечивается стабилизация заданных параметром полета.
Управление траекторным движением самолета в вертикальной плоскости осуществляется с помощью формированием заданного значения нормальной перегрузки и ее отработкой внутренним контуром через руль высоты с применением позиционного сигнала по углу тангажа, высоты и вертикальной скорости.
Траекторное управление в боковой плоскости осуществляется с помощью формирования заданного угла крена, курса и заданной боковой перегрузки и отработкой внутренним контуром через элероны и руль направления.
Автоматическое управление в том или ином режиме реализуется путем определения рассогласования текущих и заданных параметров полета и формированием контурами стабилизации управляющих сигналов перемещения сервоприводами ИМ 6-8 механической проводки и аэродинамических органов управления.
При этом ИМ 6-8 обеспечивает подключение, отключение к механической проводке системы ручного управления самолетом и ее приоритетное управление перемещением от пилота (пересиливание) относительно управляющих сигналов от АП.
При включении автопилота АП осуществляется непрерывный контроль взаимодействующего оборудования 9, 10 и вычислительных подсистем, производится контроль соответствия математической модели сервопривода и текущим параметрам ИМ 6-8. При нарушении соответствия и выявлении несогласованных действий ИМ 6-8 с характером управляющих сигналов и поведением математической модели сервопривода осуществляется отключение автопилота АП с визуальной сигнализаций на жидкокристаллическом индикаторе ПВ 2 причин отключения.
На протяжении всего полета производится непрерывный автоматический полетный контроль блоков АП и исправности информации от взаимодействующего бортового оборудования с индикацией отказов и обеспечением блокировки включения, а также автоматического отключения каналов управления и режимов работы при наличии соответствующих отказов.
Программно-аппаратная реализация АП исключает возможность включения в полете наземного автоматизированного контроля системы, при котором определяется готовность блоков, датчиков информации 9, 10, напряжений электропитания и т.д.
Все функции, присущие АП, выполняются с использованием информации системы курсовертикали 9, системы воздушных сигналов 10, принимаемой по кодовым линиям связи по ARINC-429 в соответствии с протоколами информационного взаимодействия.
АП обеспечивает заданные соотношения между отклонением аэродинамических органов управления самолетом и контролируемыми параметрами движения, не выходящими за эксплуатационные ограничения, и парирование внешних возмущений. АП разработан с возможностью определения отказа сопряженного оборудования и дополнительного графического сигнализирования и отображения на жидкокристаллическом индикаторе 3 выбранного параметра из общего перечня параметров сопрягаемых систем 9, 10 и собственных параметров АП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| Система дистанционного управления региональным самолётом | 2022 |
|
RU2795074C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СБОРА, КОНТРОЛЯ, ОБРАБОТКИ И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2530701C1 |
Автопилот для самолетов малой авиации содержит корпус, в котором расположен пульт-вычислитель управления полетом, исполнительные механизмы в виде сервоприводов, представляющих собой электромеханические сервоприводы вращательного типа с встроенной механической муфтой пересиливания и электромагнитной муфтой сцепления/расцепления двигателя. Пульт-вычислитель содержит шесть конструктивно-функциональных модулей, один из которых является дисплейным модулем, содержащим жидкокристаллический индикатор, средства ввода и обработки информации и пять функциональных модулей на основе функциональных плат (ПФ1-ПФ5), первый из которых (ПФ1) является центральным, содержащим два процессора, один из которых является главным, а другой контролирующим, и выполненный с возможностью соединения с сервоприводами на соответствующий канал управления, второй (ПФ2) обеспечивает связь с бортовыми информационными системами, включающими курсовертикаль, системы воздушных сигналов и навигации, модули ПФ-3 и ПФ-4 обеспечивают аналого-цифровое преобразование сигналов постоянного и переменного тока и цифро-аналоговое преобразование сигналов постоянного тока, а также обмен с бортовыми системами по линиям ARINC-429, модуль ПФ-5 содержит четыре независимых источника питания. Обеспечивается повышение отказобезопасности автопилота, улучшение характеристик устойчивости и управляемости самолета, повышение безопасности полета. 3 ил.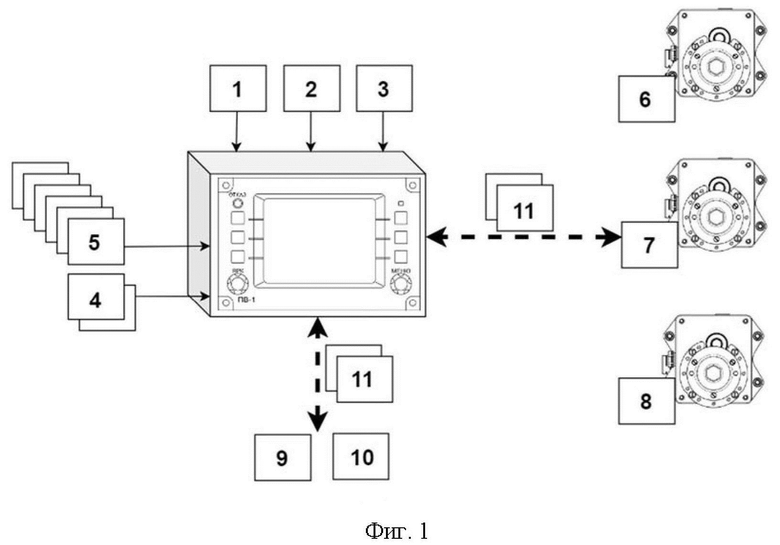
Автопилот для самолетов малой авиации содержащий корпус, в котором расположен пульт-вычислитель управления полетом, исполнительные механизмы в виде сервоприводов, представляющих собой электромеханические сервоприводы вращательного типа с встроенной механической муфтой пересиливания и электромагнитной муфтой сцепления/расцепления двигателя, при этом пульт-вычислитель содержит шесть конструктивно-функциональных модулей, один из которых является дисплейным модулем, содержащим жидкокристаллический индикатор, средства ввода и обработки информации и пять функциональных модулей на основе функциональных плат (ПФ1-ПФ5), первый из которых (ПФ1) является центральным, содержащим два процессора, один из которых является главным, а другой контролирующим, и выполненный с возможностью соединения с сервоприводами на соответствующий канал управления, второй модуль (ПФ2) обеспечивает связь с бортовыми информационными системами, включающими курсовертикаль, системы воздушных сигналов и навигации, модули ПФ-3 и ПФ-4 обеспечивают аналого-цифровое преобразование сигналов постоянного и переменного тока и цифро-аналоговое преобразование сигналов постоянного тока, а также обмен с бортовыми системами по линиям ARINC-429, модуль ПФ-5 содержит четыре независимых источника питания, обеспечивающих питание устройства.
| СПОСОБ НАСТРОЙКИ ЛИНЕЙНЫХ КОРРЕКТОРОВ В КАНАЛАХ ПРОВОДНОЙ СВЯЗИ | 0 |
|
SU191643A1 |
| Ракета с поворотным крылом | 1930 |
|
SU22522A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2644842C2 |
| В.С | |||
| Книга | |||
| МАЛОГАБАРИТНЫЙ АВТОПИЛОТ АП-МВЛ ДЛЯ ЛЕГКИХ САМОЛЕТОВ | |||
| Математические методы в технологиях и технике | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| US 20190227548 A1, 25.07.2019 | |||
| US 20210276696 A, 09.09.2021. | |||

