Настоящее техническое решение относится к области судовождения, а именно к средствам автоматического управления движением широкого класса судов.
Известна система автоматического управления судном, патент RU 2248914, В63Н 25/04, от 01.03.2004, содержащая датчик и задатчик курса, датчик угловой скорости, датчик кормовых рулей, выходы которых подключены к входам первого сумматора-усилителя, выход которого соединен с входом рулевого привода кормовых рулей, датчик угла дрейфа и датчик носовых рулей, выход которого подключен к первому входу второго сумматора-усилителя. Кроме того, в состав системы введены датчик и задатчик бокового смещения судна, задатчик допустимого угла дрейфа и блок логики, содержащий алгебраический сумматор, сумматор модулей двух сигналов, диод и электромагнитное реле с двумя нормально-разомкнутыми и нормально-замкнутой контактными группами. Недостатками данного технического решения являются следующие.
1. Нестабильность характеристик. В связи с применением аналоговых узлов, параметры которых существенно зависят от условий эксплуатации (в первую очередь от температуры окружающей среды), будет наблюдаться дрейф параметров системы в целом.
2. Низкая отказоустойчивость. В структуре системы не предусмотрено каких-либо средств нейтрализации отказов отдельных узлов, поэтому выход из строя любого узла приведет к отказу системы в целом.
3. Ограниченные функциональные возможности. Внедрение дополнительных управляющих звеньев или расширение набора датчиков потребует полной переработки аппаратуры системы управления.
4. Фиксированный алгоритм управления. Как и в случае расширения, реализация другого алгоритма управления потребует полной переработки аппаратуры.
Задачи расширения функциональных возможностей, применения различных алгоритмов управления и повышения стабильности, благодаря наличию цифрового вычислителя, частично решаются в изобретении-прототипе - аппаратуре автоматического управления движением судна, патент RU 2221728, В632Н 25/04, от 13.05.2002, содержащей, кроме вычислителя, задатчик путевого угла, датчик угла перекладки руля, рулевой привод, опорную и вспомогательную антенны, приемник СНС, сумматор, два интегратора и дифференциатор. Однако недостаток низкой отказоустойчивости в данной аппаратуре по-прежнему присутствует, так как выход из строя вычислительного устройства повлечет за собой отказ всей системы.
В то же время отказ может носить кратковременный характер, то есть может возникнуть так называемый сбой цифрового вычислителя, приводящий к получению недостоверных результатов вычисления. Сбой такого характера может быть следствием воздействия мощной электромагнитной помехи, вызванной, например, грозовым разрядом или «искрением» силового электрооборудования судна (подъемники, электродвигатели и т.д.).
В то же время после исчезновения внешнего воздействия вычислитель способен правильно работать, необходимо только восстановить полученные до сбоя результаты вычислений.
Для нейтрализации последствий кратковременных сбоев вычислительного устройства и сохранения работоспособности системы управления в целом предлагается ввести в состав системы запоминающее устройство с санкционированным доступом (ЗУСД), в которое вычислитель периодически (например, 1 раз в цикле решения задач управления) записывает массив результирующей информации, используя которую можно продолжить вычисления.
Предлагается система управления, содержащая датчики угловой скорости, ветра, волнения, приемник системы спутниковой навигации (СНС), лаг, эхолот, магнитный компас, гирокомпас, автоматическую идентификационную систему (АИС), вычислительное устройство и запоминающее устройство с санкционированным доступом.
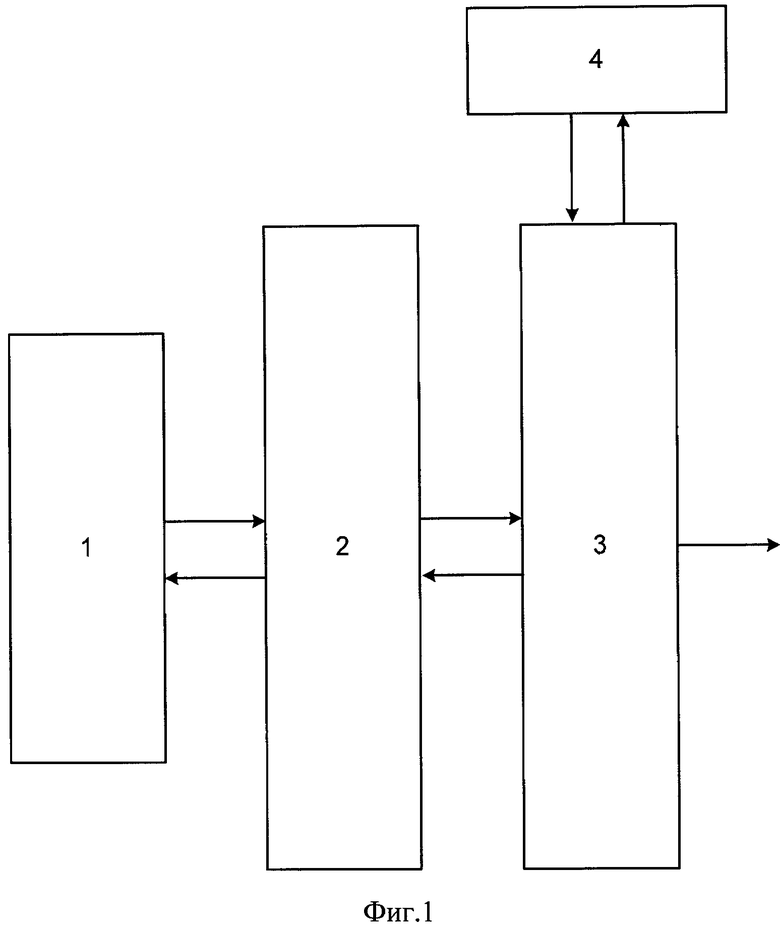
На фиг.1 приведена структурная схема предлагаемой системы управления, где цифрами обозначены:
1 - блок датчиков;
2 - блок сбора информации (интегратор навигационной информации);
3 - вычислительное устройство;
4 - запоминающее устройство с санкционированным доступом.
Выходы и входы (выходы при отсутствии управления или настройки) источников навигационной информации (блок датчиков) подключены к входам и выходам блока сбора информации, предназначенным для сопряжения с датчиками. Вход и выход блока сбора информации, предназначенные для сопряжения с вычислительным устройством, подключены к выходу и входу вычислительного устройства. Вычислительное устройство также имеет выход, подключенный к входу запоминающего устройства с санкционированным доступом, выход которого подключен к входу вычислительного устройства, и выход, который может быть подключен к устройству управления исполнительными механизмами судна.
На фиг.2 приведена структурная схема блока сбора информации (интегратора навигационной информации). Цифрой 1 обозначена группа приемо-передающих элементов, цифрой 2 обозначен блок изолирующих элементов, цифрами 3, 4, 5, 6 обозначены соответственно первый, второй, третий и четвертый контроллеры обмена с датчиками, цифрой 7 обозначен блок управления, цифрой 8 обозначен контроллер обмена с вычислительным устройством.
При этом группа приемо-передающих элементов имеет ряд входов и выходов, используемых для сопряжения с датчиками и являющихся входами и выходами интегратора навигационной информации, и ряд входов и выходов, подключенных к выходам и входам блока изолирующих элементов.
Блок изолирующих элементов дублирует информацию с входов и выходов, подключенных к группе приемо-передающих элементов, на соответствующие выходы и входы, подключенные к контроллерам обмена с датчиками, остальные входы и выходы которых соединены с выходами и входами блока управления. Входы и выходы блока управления, не подключенные к контроллерам обмена с датчиками, подключены к контроллеру обмена с вычислительным устройством, остальные входы и выходы которого являются входами и выходами интегратора навигационной информации и подключаются к вычислительному устройству.
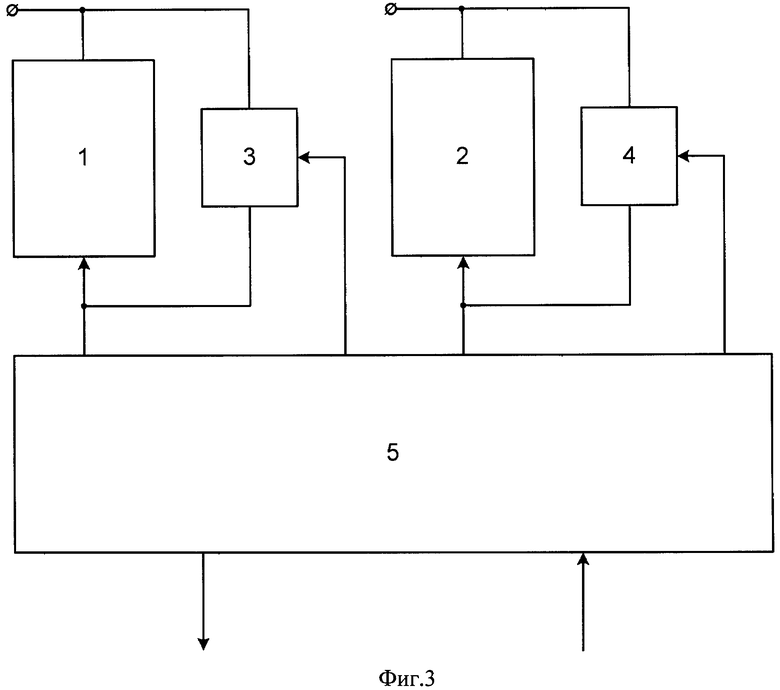
На фиг.3 приведена структурная схема запоминающего устройства с санкционированным доступом. Цифрами 1 и 2 обозначены соответственно первый и второй накопители информации, цифрами 3 и 4 - первый и второй транзисторные ключи, шунтирующие сигналы обращения к одноименным накопителям. Цифрой 5 обозначен блок связи с вычислительным устройством.
При этом вход и выход блока связи являются входом и выходом запоминающего устройства, первый управляющий выход блока подключен к управляющему входу первого ключа, второй управляющий выход подключен к управляющему входу второго ключа. При этом выходы ключей подключены между входом сигнала обращения и «0» шиной питания одноименного накопителя.
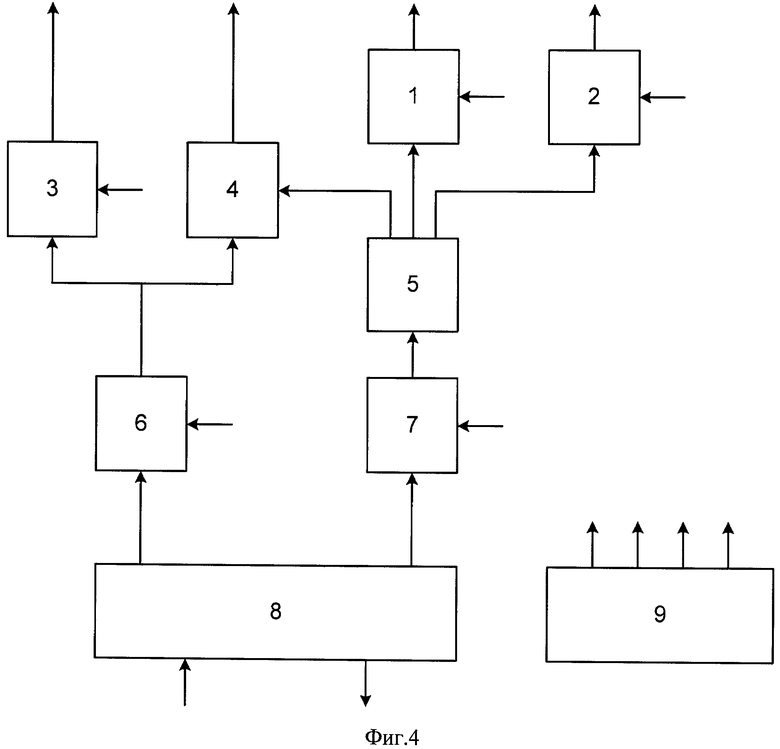
На фиг.4 приведена структурная схема блока связи. Цифрами 1 и 2 обозначены первый и второй формирователи сигналов обращения соответственно к первому и второму накопителям. Цифрами 3 и 4 обозначены дешифраторы-формирователи сигналов блокировки обращения к первому и второму накопителям. Цифрой 5 обозначен дешифратор адресов, цифрой 6 обозначен регистр данных, цифрой 7 обозначен регистр адреса, цифрой 8 обозначена группа приемо-передающих элементов, цифрой 9 обозначен формирователь синхроимпульсов.
При этом первый выход группы приемо-передающих элементов подключен к входу регистра данных, группа выходов которого подключена к входам дешифраторов-формирователей сигналов блокировки, выходы которых являются выходами блока связи. Второй выход группы приемо-передающих элементов подключен к регистру адреса, выход которого соединен с входом дешифратора адреса, первый, второй и третий выходы которого подключены соответственно к входу первого и второго дешифраторов-формирователей сигналов блокировки и входу первого и второго формирователей сигналов обращения, выходы которых являются выходами блока связи. Остальные входы и выходы приемо-передающих элементов являются входами и выходами блока связи. При этом первый, второй, третий и четвертый выходы формирователя синхроимпульсов подключены соответственно к стробирующим входам регистра данных, регистра адреса, первого и второго формирователей сигналов обращения.
При включении питания датчики с определенным периодом формируют выходную информацию. Каждый датчик имеет свой выходной интерфейс, для согласования с которым в блоке сбора информации установлены приемо-передающие элементы. Приемо-передающие элементы преобразуют информацию с датчиков к виду, пригодному для обработки контроллерами обмена с датчиками, и передают ее на блок изолирующих элементов. Блок изолирующих элементов необходим для обеспечения гальванической изоляции датчиков и вычислительного устройства, в нем информация дублируется и поступает на контроллеры обмена с датчиками, где преобразуется к виду, пригодному для обработки вычислительным устройством, и сохраняется в регистровой памяти контроллеров обмена с датчиками. Блок управления в соответствии с циклограммой, задаваемой вычислительным устройством, производит считывание информации из регистровой памяти контроллеров обмена с датчиками и последующую передачу считанной информации через контроллер обмена с вычислительным устройством в вычислительное устройство.
Получив информацию, вычислительное устройство приступает к ее обработке в соответствии с реализуемым алгоритмом управления. Результаты вычислений передаются в устройство управления исполнительными механизмами судна и записываются в запоминающее устройство с санкционированным доступом, причем запись в нечетном цикле осуществляется в первый накопитель, в четном - во второй.
При каждом выходе на программу (включение питания, восстановление после сбоя) вычислительное устройство анализирует информацию в запоминающем устройстве с санкционированным доступом. При наличии признаков аварийного завершения дальнейший расчет ведется не с начальных условий, а с последних корректно сохраненных результатов. Корректность сохранения результатов обеспечивается санкционированием доступа к накопителям и их чередованием.
Санкционирование доступа достигается за счет наличия транзисторных ключей, шунтирующих сигнал обращения к накопителям при наличии сигналов блокировки с блока связи.
Техническими результатами, обеспечиваемыми системой управления судном приведенной конфигурации, являются
- повышение отказоустойчивости системы управления;
- повышение безопасности судовождения;
- повышение эффективности судоходства;
- улучшение условий труда судоводителей;
- обеспечение экологической безопасности водных путей;
- упрощение алгоритмов нейтрализации отказов;
- расширение функциональных возможностей системы управления;
- возможность реализации различных алгоритмов управления;
- повышение стабильности параметров системы управления;
- обеспечение перспективными средствами связи и навигации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2503581C2 |
| КОНТРОЛЛЕР ПЕРЕДАЧИ ДАННЫХ | 2013 |
|
RU2514135C1 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |
| СИСТЕМА АСТРОНАВИГАЦИИ | 2013 |
|
RU2548927C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ ДАННЫХ | 2011 |
|
RU2444052C1 |
| МАГИСТРАЛЬНО-МОДУЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2564626C2 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО БИНС | 2011 |
|
RU2469376C1 |
| УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2011 |
|
RU2520350C2 |

Изобретение относится к технике автоматического управления движением широкого класса судов. Система управления судном содержит датчики угловой скорости, ветра и волнения, эхолот, магнитный и гирокомпасы, устройство спутниковой навигации. Имеются также блок сбора информации, управляющее вычислительное устройство и исполнительные устройства рулевого привода. В состав системы введено запоминающее устройство с санкционированным доступом к информации результатов каждого цикла расчета управления. Получив информацию, вычислительное устройство приступает к ее обработке в соответствии с реализуемым алгоритмом управления. Результаты вычислений передаются в устройство управления исполнительными механизмами судна и записываются в запоминающее устройство, причем запись в нечетном цикле осуществляется в один накопитель, а в четном - в другой. При каждом выходе на программу (включение питания, восстановление после сбоя) вычислительное устройство анализирует информацию в запоминающем устройстве. При наличии признаков аварийного завершения дальнейший расчет ведется не с начальных условий, а с последних корректно сохраненных результатов. Корректность сохранения результатов обеспечивается санкционированием доступа к накопителям и их чередованием. Изобретение обеспечивает, в частности, повышение отказоустойчивости системы управления, безопасности судовождения, эффективности судоходства. 3 з.п. ф-лы, 4 ил.
1. Система управления судном, содержащая датчики угловой скорости, ветра и волнения, эхолот, магнитный и гирокомпасы, устройство спутниковой навигации, блок сбора информации и управляющее вычислительное устройство, исполнительные устройства рулевого привода, отличающаяся тем, что, с целью возобновления вычислений после сбоя, начиная с полученных до сбоя результатов вычислений, в состав системы введено запоминающее устройство с санкционированным доступом к информации результатов каждого цикла расчета управления.
2. Система управления судном по п.1, отличающаяся тем, что блок сбора информации (интегратор навигационной информации) содержит группу приемопередающих элементов, блок изолирующих элементов, четыре контроллера обмена с датчиками, блок управления и контроллер обмена с вычислительным устройством, при этом группа приемопередающих элементов имеет ряд входов и выходов, используемых для сопряжения с датчиками и являющихся входами и выходами интегратора навигационной информации, и ряд входов и выходов, подключенных к выходам и входам блока изолирующих элементов, дублирующего информацию с входов и выходов, подключенных к группе приемопередающих элементов, на соответствующие выходы и входы, подключенные к контроллерам обмена с датчиками, остальные входы и выходы которых соединены с выходами и входами блока управления, при этом входы и выходы блока управления, не подключенные к контроллерам обмена с датчиками, подключены к контроллеру обмена с вычислительным устройством, остальные входы и выходы которого являются входами и выходами интегратора навигационной информации и подключаются к вычислительному устройству.
3. Система управления судном по п.2, отличающаяся тем, что запоминающее устройство с санкционированным доступом содержит два накопителя информации, два транзисторных ключа, шунтирующих сигналы обращения к одноименным накопителям, и блок связи с вычислительным устройством, при этом вход и выход блока связи являются входом и выходом запоминающего устройства, первый управляющий выход блока подключен к управляющему входу первого ключа, второй управляющий выход подключен к управляющему входу второго ключа, при этом выходы ключей подключены между входом сигнала обращения и «0» шиной питания одноименного накопителя.
4. Система управления судном по п.3, отличающаяся тем, что блок связи запоминающего устройства содержит два формирователя сигналов обращения к накопителям, два дешифратора-формирователя сигналов блокировки обращения, дешифратор адресов, регистр данных, регистр адреса, группу приемопередающих элементов и формирователь синхроимпульсов, при этом первый выход группы приемопередающих элементов подключен к входу регистра данных, группа выходов которого подключена к входам дешифраторов-формирователей сигналов блокировки, выходы которых являются выходами блока связи, второй выход группы приемопередающих элементов подключен к регистру адреса, выход которого соединен с входом дешифратора адреса, первый, второй и третий выходы которого подключены соответственно к входу первого и второго дешифраторов-формирователей сигналов блокировки и входу первого и второго формирователей сигналов обращения, выходы которых являются выходами блока связи, при этом остальные входы и выходы приемопередающих элементов являются входами и выходами блока связи, при этом первый, второй, третий и четвертый выходы формирователя синхроимпульсов подключены соответственно к стробирующим входам регистра данных, регистра адреса, первого и второго формирователей сигналов обращения.
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Система управления движением судна | 1978 |
|
SU717730A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ВЫПОЛНЕНИЯ ПРОГРАММЫ НА НЕНАДЕЖНОЙ ЭВМ | 1991 |
|
RU2015548C1 |

