Данное изобретение относится к ультразвуковым диагностическим системам и, в частности, к трехмерным ультразвуковым диагностическим системам визуализации, которые автоматически осуществляют развертку двумерных плоскостей изображения по отношению к опорной плоскости, и экспортируют развернутые плоскости как отдельные плоскости изображения или последовательности изображений.
Патенты США 6709394 (Frisa и др.) и 6755786 (Frisa и др.) описывают ультразвуковую двухпроекционную визуализацию. При двухпроекционной визуализации зонд с двумерным матричным преобразователем сканирует две различные двумерные плоскости изображения в быстром сменяющем друг друга следовании, тем самым производя изображения прямой передачи («вживую») в реальном времени в обеих плоскостях. Одна из плоскостей изображения определяется как опорная плоскость изображения. Эта плоскость изображения ориентирована, как правило, перпендикулярно плоскости матричного преобразователя, продолжаясь прямо от зонда вокруг центральной ортогональной оси к массиву. Ориентацию опорного изображения обычно поддерживают неподвижной, а вторая плоскость изображения подвижна по отношению к этой опорной плоскости. В патенте '394 описана двухпроекционная визуализация, при которой вторую плоскость изображения можно наклонять или поворачивать относительно опорной плоскости. В коммерческом варианте осуществления, доступном от Philips Healthcare of Andover, MA, наклоненная плоскость изображения имеет заданную ориентацию центральной оси на одной линии с центральной осью опорной плоскости. Наклонную плоскость можно двигать (наклонять) таким образом, что она ориентируется под разными углами по отношению к центральной оси опорной плоскости, но ее центральная ось всегда расположена в опорной плоскости. Эта реализация двухпроекционного вращения, в свою очередь, имеет поначалу центральную ось второй (поворачивающейся) плоскости изображения, выровненной с центральной осью опорного изображения, и ориентация второго изображения ортогональна плоскости опорного изображения. Из этого исходного положения поворачивающуюся плоскость можно поворачивать вокруг ее центральной оси под углами относительно опорного изображения, которые отличаются от прямого. Патент '786 описывает то, что известно как двухпроекционная визуализация с изменением по высоте и наклоном. При визуализации с изменением по высоте и наклоном второе изображение имеет исходное положение на одной линии с опорным изображением. Затем второе изображение отодвигают от опорной плоскости изображения в вертикальном направлении к разным плоскостям, которые не пересекают опорную плоскость изображения. Таким образом, две плоскости могут быть абсолютно параллельны или параллельны под углом, причем последнее является состоянием, когда вторая плоскость имеет общее с опорной плоскостью расположение вершины или пересекает опорную плоскость выше верха (на незначительную глубину) изображения. Двухпроекционные изображения позволяют клиницисту позиционировать опорную плоскость так, чтобы просмотреть целевую анатомию или интересующую область, а затем перемещать вторую плоскость для наблюдения других плоскостных изображений целевой анатомии. Как показано в патентах, два двухпроекционных изображения отображаются рядом одновременно, так что клиницист может постоянно видеть опорное изображение при движении второй плоскости. Двухпроекционная визуализация позволяет клиницисту сканировать и наблюдать две плоскости изображения одновременно, при постоянном сохранении координат местоположений изображений внутри трехмерного объема, подлежащего сканированию, его или ее навигационным средством. Когда клиницист определяет место интересующей анатомии на обеих плоскостях изображения, одиночное изображение или цикл (последовательность изображений прямой передачи) могут быть зафиксированы или сохранены и отображены или воспроизведены позже при постановке окончательного диагноза.
Фиксация двойного отображения изображений уменьшит размер каждого изображения по сравнению с размером отображения одиночного изображения. В некоторых случаях может быть желательно сохранять только второе изображение, которому было назначено место наблюдения анатомии, требующей диагностики; опорное изображение может и не быть необходимым для диагностики. Сохранение только второго изображения позволит изображению отображаться в большем формате изображения, что помогает детальной диагностике. Также может быть желательным сохранять не только одиночное подвижное изображение, но все изображения в диапазоне ориентаций изображения. Изменение положения подвижных изображений вручную на ряд новых ориентаций, затем фиксация новых изображений одного за другим, является утомительным и трудоемким и предоставляет неполную серию изображений, если зонд движется случайно во время процесса. Было бы также желательно иметь возможность автоматически двигаться пошагово или разворачивать по диапазону ориентаций изображения и фиксировать все изображения в диапазоне или развертке. Кроме того, желательно, иметь возможность сохранять только последовательность развернутых вторых изображений, независимо от опорного изображения, когда опорное изображение более бесполезно для диагностики.
В соответствии с принципами настоящего изобретения система визуализации ультразвуковой диагностики выполняет двухпроекционную визуализацию с возможностью осуществлять развертку и сохранять изображения из серий двухпроекционных изображений с подвижной ориентацией. При нажатии на кнопку вторая (подвижная) плоскость двухпроекционных изображений поворачивается, наклоняется или поднимается по всему диапазону ориентаций или выбранному поддиапазону и последовательность сохраняется для последующего изучения. В соответствии с дополнительным аспектом настоящего изобретения подвижная плоскость изображения или последовательность таких плоскостей, либо статических, либо изображений прямой передачи, могут быть зафиксированы и сохранены отдельно от изображения опорной плоскости. Отдельное изображение или цикл изображений могут быть экспортированы для последующего просмотра и диагностики.
НА ЧЕРТЕЖАХ:
На Фиг. 1 показана в виде блок-схемы ультразвуковая диагностическая система визуализации, сконструированная в соответствии с принципами настоящего изобретения.
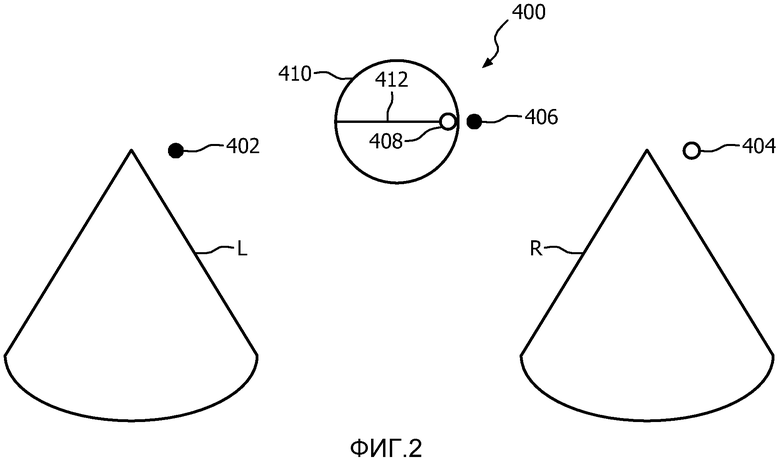
На Фиг. 2 показано двухпроекционное отображение, согласно известному уровню техники.
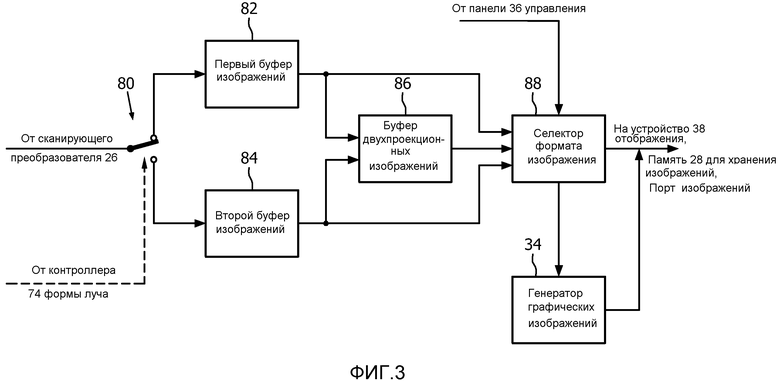
На Фиг. 3 показана в виде блок-схемы подсистема выбора формата двухпроекционного изображения ультразвуковой системы на Фиг. 1.
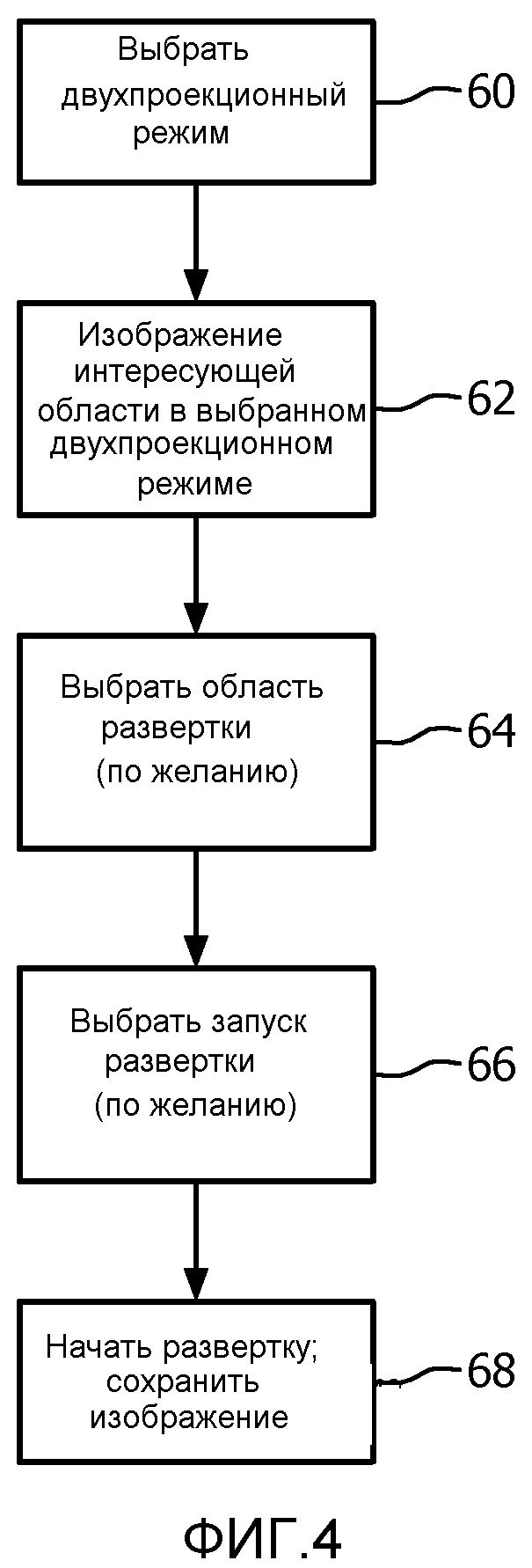
На Фиг. 4 представлена блок-схема, иллюстрирующая начальную установку и сбор двухпроекционных изображений развертки в соответствии с принципами настоящего изобретения.
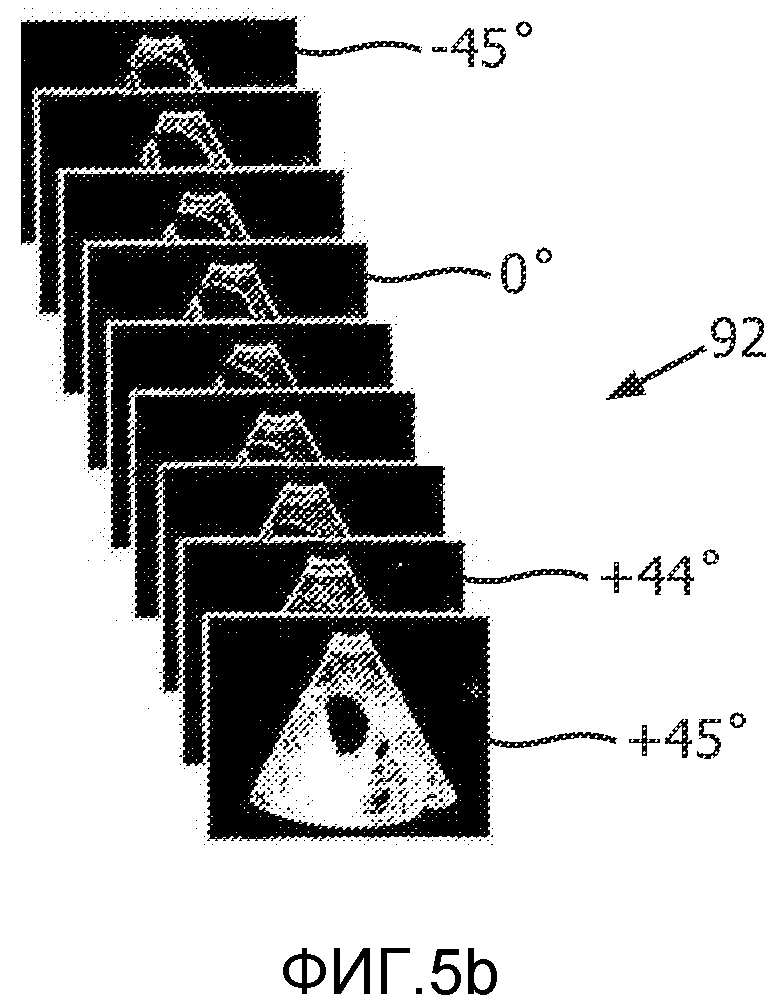
На Фиг. 5a и 5b показаны сохраненные по отдельности вторые (подвижные) двухпроекционные изображения в соответствии с принципами настоящего изобретения.
Обратимся сначала к Фиг. 1, ультразвуковая система 10, сконструированная в соответствии с принципами настоящего изобретения, представлена в виде блок-схемы. Ультразвуковая система скомпонована из двух подсистем - подсистемы 10A сбора с предварительной обработкой и подсистемы 10B отображения. Ультразвуковой зонд соединен с подсистемой сбора, которая включает в себя двумерный матричный преобразователь 70 и микроформирователь 72 луча. Микроформирователь луча содержит схемы, которые управляют сигналами, применяемыми к группе элементов («группа приемников») матричного преобразователя 70, и делает некоторую обработку эхосигналов, принятых элементами каждой группы. Микроформирователь луча в зонде предпочтительно уменьшает количество проводов в кабеле между зондом и ультразвуковой системой и описан в патенте США 5997479 (Savord et al.) и в патенте США 6436048 (Pesque) и обеспечивает электронное управление передачей и приемом лучей при визуализации в режиме реального времени (прямой передаче) с высокой частотой кадров.
Зонд связан с подсистемой 10A сбора ультразвуковой системы. Подсистема сбора включает в себя контроллер 74 формы луча, который способен реагировать на пользовательский блок 36 управления, и подает сигналы управления на микроформирователь 72 луча, дающие инструкции зонду относительно синхронизации, частоты, направления и фокусировки переданных лучей. Контроллер формы луча также управляет формированием лучей эхосигналов, принятых подсистемой сбора, с помощью управления аналого-цифровыми (А/Ц) преобразователями 18 и формирователем 20 луча. Частично сформированные лучи эхо-сигналов, принятые зондом, усиливаются схемой 16 предусилителя и ДРУ (дифференциальная регулировка усиления) в подсистеме сбора, затем оцифровываются А/Ц преобразователями 18. Оцифрованные эхо-сигналы затем формируются в полностью управляемые и сфокусированные лучи основным формирователем 20 луча системы. Эхо-сигналы затем обрабатываются процессором 22 изображений, который осуществляет цифровую фильтрацию, измерение в B-режиме и M-режиме, и доплеровскую обработку, а также может выполнять другие обработки сигнала, такие как разделение гармоник, понижение уровня спеклов и другие требуемые обработки сигнала изображения.
Эхо-сигналы, производимые подсистемой 10A сбора, связываются с подсистемой 10B отображения, которая обрабатывает эхо-сигналы для отображения в нужном формате изображения. Эхо-сигналы обрабатываются процессором 24 строки изображения, который выполнен с возможностью провести дискретизацию по времени эхо-сигналов, сопряжение сегментов лучей в полные линейные сигналы и усреднение линейных сигналов для улучшения отношения сигнал-шум или установки уровня усреднения потока. Строки изображения для двумерного изображения сканирования преобразуются в нужный формат изображения посредством сканирующего преобразователя 26, который выполняет преобразование полярных координат, как известно в данной области техники. Сканирующий преобразователь может, таким образом, задавать формат прямолинейного или секторного видов изображения. Затем изображение сохраняется в памяти 28 для хранения изображений, из которой оно может быть отображено на устройстве 38 отображения, как описано более подробно на Фиг. 3. Изображение в памяти также совмещается с графиками, которые должны отображаться с изображением, которые генерируются генератором 34 графических изображений, который реагирует на пользовательский блок 36 управления, так что произведенные графики связываются с изображениями устройства отображения. Отдельные изображения или последовательности изображений могут быть сохранены в кино-памяти 30 в течение фиксации циклов изображений или последовательностей.
Для объемной визуализации в реальном времени подсистема 10B отображения также включает в себя процессор 32 построения трехмерного изображения, который принимает строки изображения от процессора 24 строки изображения для построения трехмерных изображений в реальном времени. Трехмерные изображения могут быть отображены как изображения прямой передачи (в реальном времени) на устройстве 38 отображения или связаны с памятью 28 для хранения изображений для сохранения наборов трехмерных данных для последующего просмотра и диагностики.
Подсистема ЭКГ предназначена для использования, когда желательно получить изображения отдельных фаз сердечного цикла. Выводы 50 ЭКГ предоставляют сигналы ЭКГ для QRS процессора 52, который идентифицирует зубец R каждого сердечного сокращения. Синхронизация зубца R используется для получения изображения отдельного сердечного цикла. Изображения сердца, в конце фазы диастолы последовательности сердечных сокращений, могут быть получены посредством сопряжения синхронизации зубца R, как запускающего сигнала от генератора 54 запускающего сигнала, для контроллера 74 формы луча и элементов управления панели 36 управления, используемых для выбора нужной фазы сердца, при которой должны быть получены стробированные по фазе изображения.
Когда матричный зонд работает в двухпроекционном режиме, выбранном посредством элементов управления панели 36 управления, контроллер 74 формы луча управляется так, чтобы поочередно получать изображения в двух разных плоскостях изображения быстро, в следовании в режиме реального времени. Элементы управления панели 36 управления используются для выбора нужного двухпроекционного режима, например, поворот, наклон или режим изменения по высоте и наклона. Изображения прямой передачи в двух плоскостях отображаются рядом, как представлено на Фиг. 2. Специалист по ультразвуковой эхографии будет удерживать матричный зонд неподвижным так, что целевая анатомия постоянно отображается в виде опорного изображения, затем манипулировать элементом управления панели управления для того, чтобы наклонять, поворачивать или поднимать второе изображение. Как проиллюстрировано в примере на Фиг. 2, опорное изображение L отображается в левой части экрана устройства отображения, и регулируемое второе изображение R отображается на правой стороне экрана. Справа от вершины каждого изображения на Фиг. 2 имеется маркер 402, 404 ориентации зонда, отображаемый как точка рядом с каждым изображением. Отображаемый маркер коррелирует с меткой на зонде, которая обозначает левую или правую сторону изображения, в зависимости от того, как специалист по ультразвуковой эхографии удерживает зонд. Этот маркер ориентирует отображаемые изображения в зависимости от того, как специалист по ультразвуковой эхографии удерживает зонд по отношению к телу пациента. Выше изображений L и R в центре экрана представлен значок 400 ориентации изображения, который указывает относительную ориентацию двух плоскостей двухпроекционного изображения. Значок 400 представляет вид на плоскости изображения, если смотреть со стороны массива преобразователя зонда, и имеет в составе окружность 410, которая графически представляет пространство, в котором изображение R может двигаться, как бы его не поворачивали. Точка 406 соответствует точке 402 опорного изображения L слева и указывает в этом примере на то, что плоскость опорного изображения ориентирована горизонтально поперек окружности 410 с маркером справа от изображения. Линия 412 на значке указывает, что изображение (подвижное) R справа ориентировано так же, как правый маркер 408, соответствующий точке 404, с правой стороны от изображения. Поскольку подвижная плоскость изображения поворачивается, линия 412 поворачивается в окружности в соответствии с меняющейся ориентацией плоскости.
Дополнительная подробная информация об этом стандартном двухпроекционном отображении для режимов наклона и поворота находится в патенте '394. Подробная информация о двухпроекционном отображении для режима с изменением по высоте и наклоном находится в патенте '786.
В соответствии с принципами настоящего изобретения двухпроекционные изображения могут быть отображены, сохранены и/или экспортированы либо в стандартном формате с обоими изображениями в одном кадре изображения, либо как независимые изображения. На Фиг. 3 представлен пример процессора для обработки изображений ультразвуковой системы с Фиг. 1, которая обеспечивает эту возможность. Линии отображаемого изображения от сканирующего преобразователя 26 попеременно направляются коммутатором 80 либо в первый буфер 82 изображений, либо во второй буфер 84 изображений. Установка в определенное положение коммутатора 80 управляется сигналом от контроллера 74 формирователя луча в соответствии с двухпроекционным изображением, получаемым системой в данный момент. Опорные двухпроекционные изображения собираются в первом буфере 82 изображения, и вторые изображения (переменной ориентации) собираются во втором буфере 84 изображений. Из этих двух буферов изображений могут быть созданы различные форматы хранения и отображения. Буферы 82 и 84 изображений связаны с входными данными селектора 88 формата изображения. Буферы 82 и 84 изображений также связаны с входными данными из буфера 86 двухпроекционных изображений, в котором оба двухпроекционные изображения форматируются для хранения и/или отображения в виде одного кадра изображения. Выход из буфера 86 двухпроекционных изображений подсоединен в качестве третьего входа селектора 88 формата изображения. Селектор 88 формата изображения, следовательно, способен производить в качестве выхода, согласно командам пользователя управляющего сигналом от панели 36 управления, либо кадры изображения опорного изображения, либо кадры изображения второго изображения (переменной ориентации), либо кадры изображения стандартного двухпроекционного отображения обоих изображений одновременно. Генератор 34 графических изображений соединен с селектором 88 для того, чтобы обеспечить соответствующее графическое наложение для выбранного типа изображения. Кадры изображения выбранного формата могут отображаться на устройстве отображения изображения 38, сохраняться в памяти 28 для хранения изображений и/или передаваться для внешнего пользования через системный порт для данных изображений (не показан). Это значит, что только последовательность изображений переменной ориентации может сохраняться и экспортироваться в другие хранилища данных или устройства отображения, независимо от опорных изображений. Также можно хранить и/или экспортировать как последовательность опорных изображений, так и независимую последовательность изображений переменной ориентации, которые были получены одновременно. Две последовательности изображений могут быть воспроизведены одновременно для стробированного отображения с использованием полученных времен изображений, хранящихся в метаданных данных изображений или на основании синхронизации (ЭКГ) сигнала, который определяет синхронизацию получения обоих наборов изображений. Следует принять во внимание, что полученные изображения могут быть статическими изображениями или изображениями прямой передачи потока или движения в теле.
В соответствии с дополнительным аспектом настоящего изобретения Фиг. 4 иллюстрирует способ работы ультразвуковой системы с Фиг. 1 для автоматического осуществления развертки в диапазоне и сбора последовательности изображений переменной ориентации пары двухпроекционных изображений. Например, опорное изображение может быть секторальным изображением с углом сектора в диапазоне от +45° до -45°; угол 0° секторального опорного изображения является центральной осью секторального изображения, простирающейся перпендикулярно от матричного преобразователя. Следовательно, переменное наклонное изображение может быть расположено в любом месте в диапазоне углов наклона от +45° до -45°. В системах двухпроекционной визуализации известного уровня техники ориентация наклона второго изображения регулируется вручную. Последовательность операций на Фиг. 4 иллюстрирует, как можно управлять ультразвуковой системой, чтобы автоматически осуществлять развертку по всему диапазону или части диапазона ориентаций второго изображения. Например, следуя приведенному выше примеру, можно управлять системой, чтобы осуществлять развертку от начала до конца и получать изображения во всем диапазоне углов наклона от +45° до -45°. Или изображения можно получить для части этого всего диапазона. Способ начинается с этапа 60 выбора нужного двухпроекционного режима. Примеры двухпроекционных режимов даны выше, включают в себя режимы наклона, поворота, изменения по высоте и наклона. Как только был выбран режим, на этапе 62 манипулируют зондом до тех пор, пока не увидят интересующую анатомическую область на опорном изображении нужного двухпроекционного режима. Для визуализации сердца интересующая область может быть, например, левым желудочком сердца. При желании на этапе 64 выбирается область, по которой должна быть осуществлена развертка ориентации. Типично весь диапазон ориентаций будет диапазоном осуществления развертки по умолчанию, например, от +45° до -45° в этом примере. При желании на этапе 66 выбирается запуск развертки. Например, может быть желательно начать осуществление развертки, когда сердце приближается, и продолжать до конца фазы диастолы сердечного сокращения. Как только все нужные параметры для сбора были установлены, нажимается кнопка на панели управления 36 для того, чтобы начать осуществление развертки или активировать пусковое устройство, чтобы начать осуществление развертки с желаемой синхронизацией. Контроллер формирователя луча быстро получает последовательность вторых изображений (переменной ориентации) - каждое с последовательно отличающейся ориентацией. В конце сбора последовательность изображений сохраняется для последующего просмотра или экспортируется в другую систему, такую как диагностическая рабочая станция.
В дополнение к установочным параметрам, проиллюстрированным на Фиг. 4, дополнительные установочные параметры могут быть угловым расстоянием между последовательными изображениями. Читатель поймет, что последовательность разверток изображений, расположенных близко друг к другу, будет иметь много изображений, однако потребуется больше времени, чтобы получить большее количество изображений, чем для последовательности с более крупным шагом по расстоянию.
На Фиг. 5a и 5b показаны два типа двухпроекционных изображений, которые могут отображаться, сохраняться и/или передаваться другому устройству в соответствии с настоящим изобретением. На Фиг. 5a представлено одиночное статическое изображение 90, такое как опорное изображение, которое может быть собрано в первый буфер 82 изображений, затем отображено на устройстве 38 отображения и сохранено как одиночное изображение. Изображение 90 может быть одиночным двухпроекционным опорным изображением или одиночным двухпроекционным изображением переменной ориентации. Вместо статического изображения изображение 90 также может быть циклом или последовательностью изображений прямой передачи, в которых наблюдают анатомию в одиночном изображении, движущемся в реальном времени. На Фиг. 5b представлена последовательность изображений 92, таких как были бы получены посредством автоматизированной развертки по диапазону углов ориентаций плоскости изображения, как описано выше. Видно, что последовательность в этом примере содержит ориентации наклона, начинающиеся с +45°, далее сдвигаясь с приращением в один градус так, что второе изображение в последовательности имеет ориентацию наклона +44°, и так далее. В середине последовательности находится изображение с номинальным наклоном 0°, и в конце последовательности, развернутой в диапазоне от +45° до -45°, находится изображение, наклонное с ориентацией в -45° в этом примере. Последовательность 92 с разверткой можно сохранить и вызывать для последующего просмотра и диагностики, когда клиницист может пройти через последовательность для того, чтобы найти наилучшую ориентацию, подходящую для постановки диагноза. Следует также принять во внимание, что каждое из наклонных изображений может быть одиночным статическим изображением, циклом изображений прямой передачи и/или стробированными изображениями, которые получают при заранее заданной фазе движущейся анатомии.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПОЗИЦИОНИРОВАНИЕ СТАНДАРТНЫХ ПЛОСКОСТЕЙ ДЛЯ ОЦЕНКИ СЕРДЦА ПЛОДА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2013 |
|
RU2654611C2 |
| ТРЕХМЕРНОЕ УЛЬТРАЗВУКОВОЕ НАВЕДЕНИЕ МНОЖЕСТВА ИНВАЗИВНЫХ УСТРОЙСТВ | 2013 |
|
RU2644540C2 |
| ВИЗУАЛИЗАЦИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ОБЗОРА С ПОМОЩЬЮ ДВУМЕРНОГО МАТРИЧНОГО ЗОНДА | 2009 |
|
RU2507535C2 |
| НАПРАВЛЯЕМЫЕ УЛЬТРАЗВУКОМ БИОПСИИ В ТРЕХ ИЗМЕРЕНИЯХ | 2013 |
|
RU2629237C2 |
| АВТОМАТИЧЕСКАЯ СЕГМЕНТАЦИЯ ТРЕХПЛОСКОСТНЫХ ИЗОБРАЖЕНИЙ ДЛЯ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ | 2014 |
|
RU2677055C2 |
| УЛЬТРАЗВУКОВАЯ ЦВЕТОВАЯ КАРТА ПОТОКА ДЛЯ ИССЛЕДОВАНИЯ МИТРАЛЬНОЙ РЕГУРГИТАЦИИ | 2013 |
|
RU2652257C2 |
| ФОРМИРОВАНИЕ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ СЕРДЦА ПЛОДА ПОСРЕДСТВОМ ФИЗИОЛОГИЧЕСКИ СТРОБИРОВАННОГО ПОЛУЧЕНИЯ ДАННЫХ, НЕ СВЯЗАННОГО С ЭКГ | 2010 |
|
RU2539006C2 |
| ПОЛУЧЕНИЕ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ С ПОМОЩЬЮ НАПРАВЛЯЕМОГО СКАНИРОВАНИЯ С EFOV | 2009 |
|
RU2519811C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ДИАГНОСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ С ЗАВИСЯЩЕЙ ОТ КОНТЕКСТА ПАНЕЛЬЮ УПРАВЛЕНИЯ | 2012 |
|
RU2617255C2 |
| ОБЛЕГЧЕННЫЙ БЕСПРОВОДНОЙ УЛЬТРАЗВУКОВОЙ ДАТЧИК | 2008 |
|
RU2502470C2 |
Изобретение относится к медицинской технике, а именно к трехмерным ультразвуковым диагностическим системам визуализации. Система содержит ультразвуковой зонд, включающий в себя двумерный матричный преобразователь, контроллер, который управляет зондом для того, чтобы получить двухпроекционные изображения отличающихся ориентаций, пользовательский блок управления, который управляется пользователем для того, чтобы подавать команды контроллеру, получать и сохранять последовательность изображений с последовательно отличающимися ориентациями изображения в диапазоне изменения углов ориентаций плоскости изображения, устройство отображения для отображения двухпроекционных изображений. Способ заключается в выборе режима двухпроекционной визуализации, визуализации интересующей области в теле в выбранном режиме, инициировании сбора с разверткой двухпроекционных изображений, где сбор с разверткой выполняют для последовательно отличающихся ориентаций изображения, и сохранении последовательности изображений. Изобретение позволяет повысить точность диагностики. 2 н. и 13 з.п. ф-лы, 5 ил.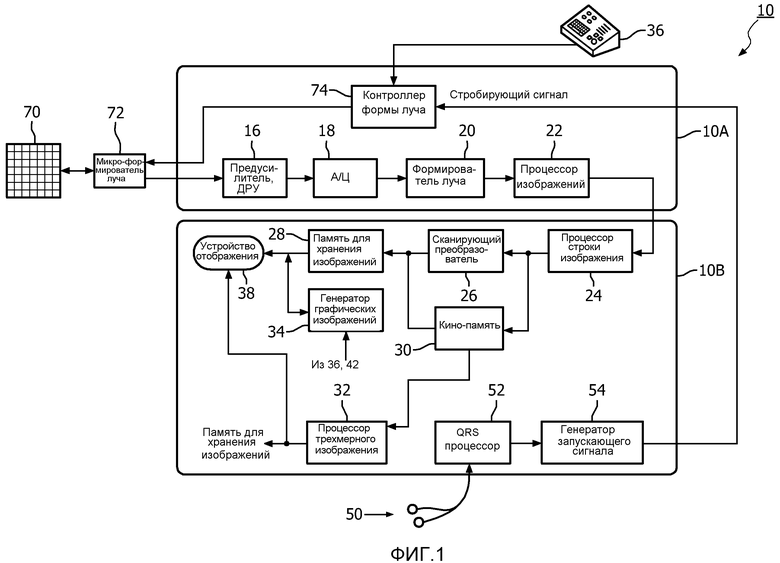
1. Ультразвуковая диагностическая система (10) визуализации для автоматизированного сбора последовательности двухпроекционных изображений с последовательно отличающимися ориентациями плоскости изображения, содержащая:
ультразвуковой зонд, включающий в себя двумерный матричный преобразователь (70);
контроллер (74), который управляет зондом для того, чтобы получить двухпроекционные изображения отличающихся ориентаций изображения;
пользовательский блок (36) управления, управляемый пользователем;
устройство (38) отображения для отображения двухпроекционных изображений;
отличающаяся тем, что
пользовательский блок (36) управления управляется пользователем для того, чтобы подавать команды контроллеру (74) получать и сохранять последовательность изображений с последовательно отличающимися ориентациями изображения в диапазоне изменения углов ориентаций плоскости изображения.
2. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая пользовательский блок управления, управляемый пользователем для установления диапазона изменения углов ориентаций плоскости изображения, в котором должны быть получены изображения.
3. Ультразвуковая диагностическая система визуализации по п. 2, дополнительно содержащая источник (54) запускающих сигналов, связанный с контроллером, для стробированного сбора последовательности изображений с последовательно отличающимися ориентациями изображения.
4. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая память (28) для хранения изображений для хранения полученной последовательности изображений с последовательно отличающимися ориентациями изображения.
5. Ультразвуковая диагностическая система визуализации по п. 4, в которой последовательно отличающиеся ориентации изображения являются разными ориентациями угла наклона, разными ориентациями угла поворота или разным изменением по высоте и ориентациями угла наклона.
6. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая пользовательский блок управления, управляемый пользователем для установления разницы в ориентации между разными ориентациями изображения.
7. Ультразвуковая диагностическая система визуализации по п. 1, в которой двухпроекционные изображения дополнительно содержат первое изображение с фиксированной ориентацией относительно матричного преобразователя и второе изображение с изменяемой пользователем ориентацией относительно первого изображения.
8. Ультразвуковая диагностическая система визуализации по п. 7, дополнительно содержащая пользовательский блок управления, управляемый пользователем для того, чтобы выбирать двухпроекционный режим, как одно из:
второго изображения, имеющего наклонную ориентацию
относительно первого изображения и пересекающего плоскость первого изображения;
второго изображения, имеющего повернутую ориентацию относительно первого изображения; или
второго изображения, наклоненного при изменении по высоте и не пересекающего плоскость первого изображения.
9. Способ работы ультразвуковой диагностической системы визуализации для получения двухпроекционных изображений, содержащий:
выбор (60) режима двухпроекционной визуализации;
визуализацию (62) интересующей области в теле в выбранном режиме двухпроекционной визуализации;
инициирование сбора (68) с разверткой двухпроекционных изображений; и
сохранение последовательности изображений двухпроекционных изображений с последовательно отличающимися ориентациями изображения;
отличающийся тем, что сбор с разверткой двухпроекционных изображений выполняют для последовательно отличающихся ориентаций изображения.
10. Способ по п. 9, дополнительно содержащий выбор (64) диапазона сбора последовательно отличающихся изображений, по которому должен быть инициирован сбор с разверткой.
11. Способ по п. 10, дополнительно содержащий выбор инкрементной разницы в ориентации между разными ориентациями изображений.
12. Способ по п. 9, в котором инициирование дополнительно содержит инициирование сбора с разверткой двухпроекционных изображений с последовательно отличающимся наклоном плоскости изображения.
13. Способ по п. 9, в котором инициирование дополнительно содержит инициирование сбора с разверткой двухпроекционных изображений с последовательно отличающимся поворотом плоскости изображения.
14. Способ по п. 9, дополнительно содержащий экспорт сохраненной последовательности изображений в другое устройство отображения изображений.
15. Способ по п. 9, дополнительно содержащий:
получение запускающего сигнала; и
в котором инициирование дополнительно содержит инициирование стробированного сбора с разверткой двухпроекционных изображений с последовательно отличающимися ориентациями изображения.
| WO 2009044316 A1, 09.04.2009 | |||
| US 2003023166 A1, 30.01.2003 | |||
| US 6245017 B1, 12.06.2001 | |||
| US 2005283078 A1, 22.12.2005 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Л.В.Осипов "Ультразвуковые диагностические приборы" | |||
| Москва | |||
| ВИДАР | |||
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |

