Область техники, к которой относится изобретение
Изобретение относится в общем к факоэмульсификации. В частности, но без ограничения, настоящее изобретение относится к наконечникам для факоэмульсификации.
Уровень техники
Человеческий глаз в самом простом представлении выполняет функцию обеспечения зрения посредством пропускания света сквозь прозрачный внешний участок, называемый роговицей, и фокусировки изображения хрусталиком на сетчатке. Качество сфокусированного изображения зависит от многих факторов, в том числе размера и формы глаза и прозрачности роговицы и хрусталика.
Когда возраст или заболевание вызывают снижение прозрачности хрусталика, зрение портится вследствие уменьшения света, который может быть пропущен к сетчатке. Медики называют данный дефект хрусталика глаза катарактой. Общепринятое лечение упомянутого состояния состоит в хирургическом удалении хрусталика и замещении функции хрусталика интраокулярной линзой (IOL).
Катарактальные хрусталики можно удалять хирургическим методом, называемым факоэмульсификацией. Во время данной процедуры тонкий наконечник для факоэмульсификации можно вводить в пораженный хрусталик и вынуждать колебаться с ультразвуковой частотой. Колебания наконечника могут превращать хрусталик в жидкость или эмульсию, так что хрусталик можно отсасывать из глаза. После удаления пораженный хрусталик можно заменить искусственным хрусталиком.
Раскрытие изобретения
В различных вариантах осуществления наконечник для факоэмульсификации может содержать стержень и участок режущего края, имеющий по меньшей мере первый и второй изгибы. Геометрия стержня и по меньшей мере первого и второго изгибов может быть выполнена с возможностью приводить к поперечному смещению стержня перпендикулярно стержню во время ультразвуковых крутильных колебаний наконечника, по длине стержня, которое меньше чем приблизительно 5-25% (например, 15%) (возможно также применение других предельных значений) от поперечного смещения дистальной концевой точки наконечника. В некоторых вариантах осуществления стержень может продолжаться от конца конического участка (который, например, может находиться на расстоянии приблизительно 12 мм от дистальной концевой точки наконечника) вплоть до первого изгиба на участке режущего края (который, например, может находиться на расстоянии приблизительно 5 мм от дистальной концевой точки наконечника). Полагаются также возможными другие местоположения первого изгиба (например, на расстоянии 3 мм, 8 мм и т.п. от дистальной концевой точки наконечника). В некоторых вариантах осуществления проксимальный конец конического участка (т.е. втулка) может быть сформирован с возможностью соединения с ультразвуковым трубчатым толкателем.
В некоторых вариантах осуществления способ определения геометрии наконечника может содержать этап обеспечения двух или более геометрий наконечника (например, в электронном формате, например, машиночитаемом входном файле одной или более сохраненными в памяти переменными, описывающими геометрию), этап моделирования характера изменения геометрий наконечника во время ультразвуковых крутильных колебаний и этап сравнения поперечного смещения различных геометрий наконечника для выбора наконечника с наименьшим поперечным смещением вдоль участка стержня наконечника, сформированного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации (который, например, может быть от конца конического участка до первого изгиба).
В некоторых вариантах осуществления способ определения геометрии наконечника может содержать этап обеспечения двух или более физических наконечников с разными геометриями (например, ручкой, изогнутой в двух или более положениях вдоль наконечника), этап возбуждения ультразвуковых крутильных колебаний разных наконечников, этап определения поперечного смещения различных наконечников и этап сравнения найденных поперечных смещений для выбора наконечника с наименьшим поперечным смещением вдоль участка стержня наконечника, сформированного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации.
Краткое описание чертежей
Для более полного понимания настоящего изобретения следует обратиться к нижеследующему описанию, изложенному в связи с прилагаемыми чертежами, на которых:
Фиг. 1 - изображение сбалансированного наконечника для факоэмульсификации с дистальным концом, имеющим два изгиба, в соответствии с одним вариантом осуществления;
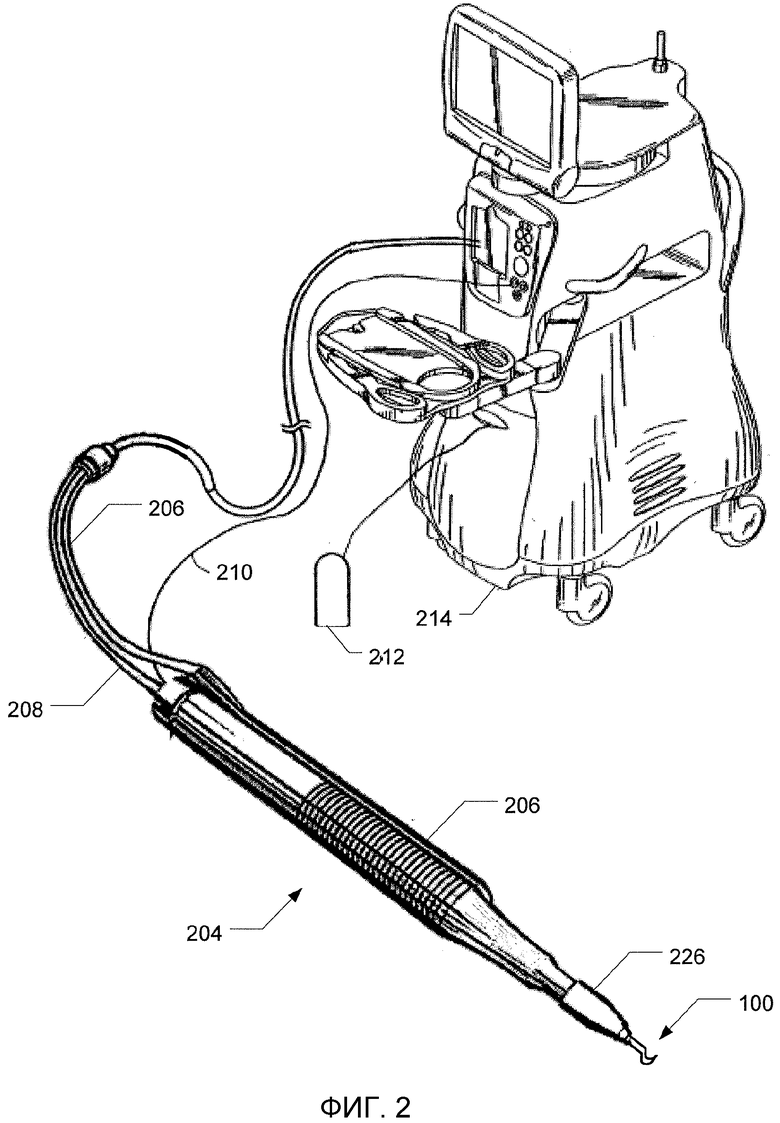
Фиг. 2 - изображение факоэмульсификационной хирургической стойки, соединенной с рукояткой управления посредством оросительной трубки и аспирационной трубки в соответствии с одним вариантом осуществления;
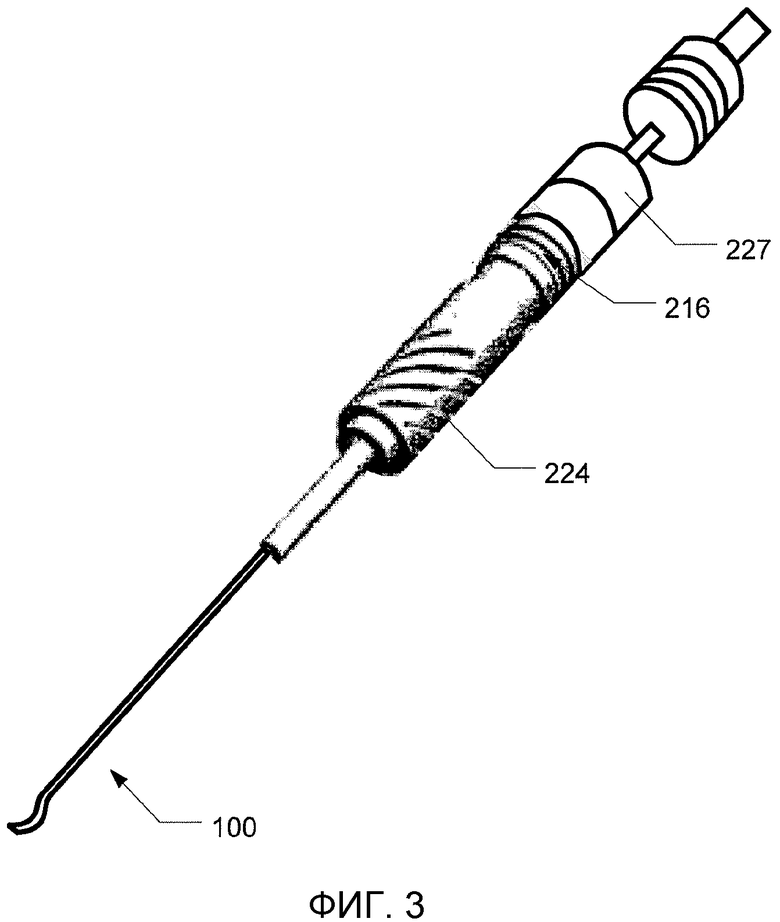
Фиг. 3 - изображение ультразвукового трубчатого толкателя, присоединенного к сбалансированному наконечнику в соответствии с одним вариантом осуществления;
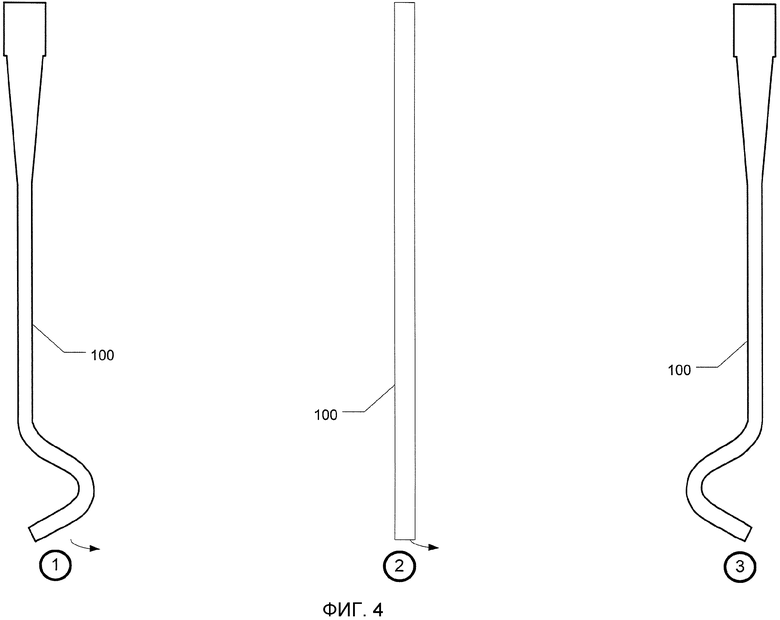
Фиг. 4 - изображение, поясняющее движение сбалансированного наконечника в соответствии с одним вариантом осуществления;
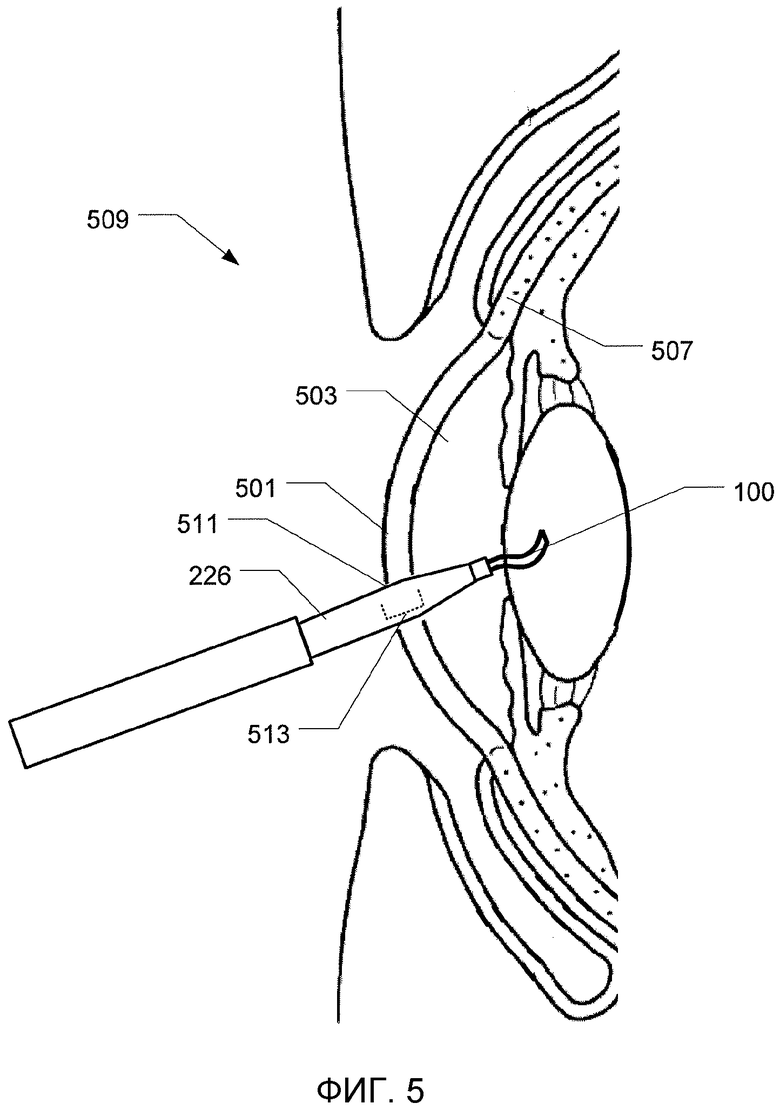
Фиг. 5 - изображение сбалансированного наконечника, введенного в разрез в глазу, в соответствии с одним вариантом осуществления;
Фиг. 6 - изображение, поясняющее крутильные колебания и поперечные колебания, относящиеся к сбалансированному наконечнику в соответствии с одним вариантом осуществления;
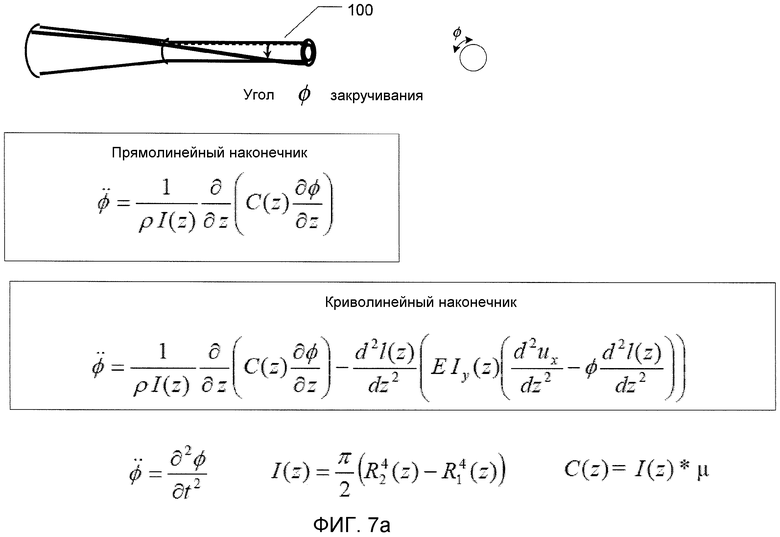
Фиг. 7a - пояснение к уравнениям моделирования для смещения закручивания вдоль z-оси наконечника в соответствии с одним вариантом осуществления;
Фиг. 7b - пояснение к уравнениям моделирования для поперечного смещения вдоль z-оси наконечника, в соответствии с одним вариантом осуществления;
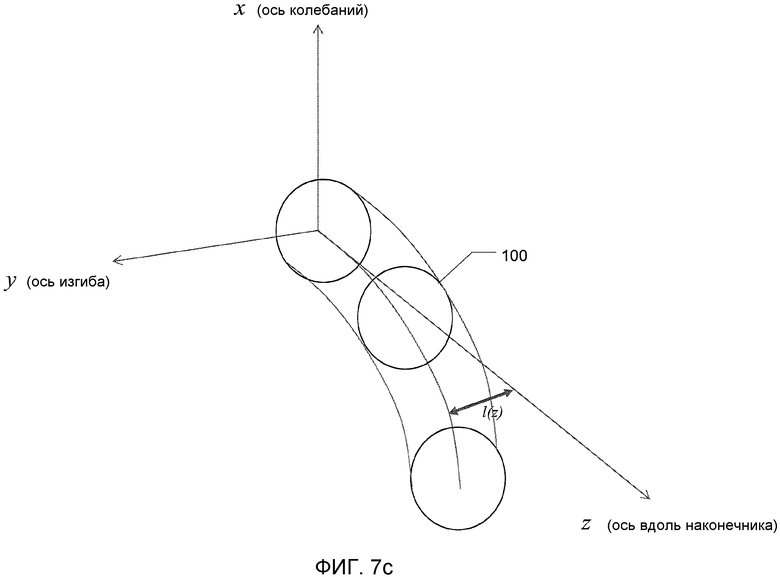
Фиг. 7c - изображение составляющей (l(z)) уравнений моделирования в соответствии с одним вариантом осуществления;
Фиг. 8a-b - варианты осуществления входных форм наконечника и соответствующих выходных поперечного смещения и угла закручивания по длине наконечника в соответствии с уравнениями моделирования;
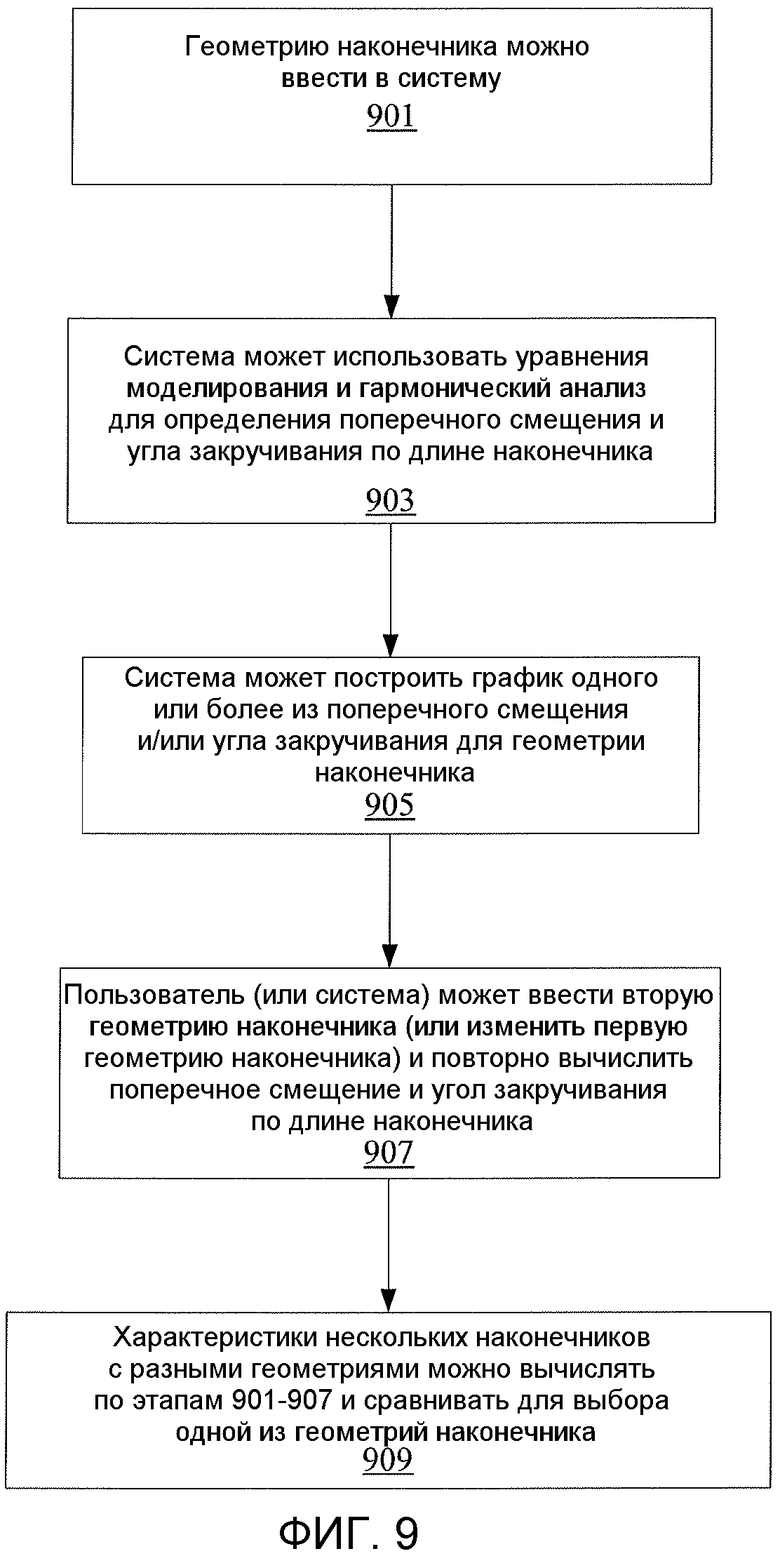
Фиг. 9 - блок-схема последовательности операций способа определения геометрии наконечника в соответствии с одним вариантом осуществления;
Фиг. 10 - блок-схема последовательности операций другого способа определения геометрии наконечника в соответствии с одним вариантом осуществления; и
Фиг. 11 - сводная таблица шести возможных вариантов осуществления сбалансированного наконечника.
Следует понимать, что как вышеприведенное общее описание, так и последующее подробное описание являются всего лишь примерными и пояснительными и предназначены для обеспечения дополнительного пояснения настоящего изобретения, описанного в формуле изобретения.
Осуществление изобретения
На фиг. 1 изображен сбалансированный наконечник 100 для факоэмульсификации с проксимальным концом 114 и участком 112 режущего края, который изогнут относительно стержня 108 наконечника. Сбалансированный наконечник 100 может содержать преимущественно прямолинейный стержень 108 и по меньшей мере два изгиба (первый изгиб 102 и второй изгиб 104) на участке 112 режущего края. Предполагается также возможным другое число изгибов (например, 3 изгиба, 4 изгиба, 7 изгибов и т.п.). Сбалансированный наконечник 100 можно использовать в соединении с рукояткой 204 управления факоэмульсификацией (см., например, фиг. 2). При использовании с рукояткой 204 сбалансированный наконечник 100 можно вынуждать совершать продольные и/или крутильные колебания, т.е. посредством поворота наконечника 100 вперед и назад вокруг его оси. Изгибы 102/104 могут располагаться, например, приблизительно на дистальных 5-25% длины сбалансированного наконечника 100) (который может быть участком, расположенным на расстоянии от приблизительно 5 мм от дистальной концевой точки 106 наконечника (при измерении вдоль оси 116 наконечника) вплоть до приблизительно 12 мм от дистальной концевой точки 106 наконечника 100). Полагаются также возможными другие значения длины участков.
В некоторых вариантах осуществления балансировка наконечника 100 может содержать формирование такой геометрии наконечника 100 (например, геометрии конического участка 110 наконечника, стержня 108 и/или по меньшей мере первого изгиба 102 и второго изгиба 104), чтобы во время ультразвуковых крутильных колебаний наконечника 100 поперечное смещение стержня 108, перпендикулярное стержню 108, по длине стержня могло быть меньше чем приблизительно 5-25% (например, 15%) от поперечного смещения дистальной концевой точки 106 наконечника 100 (например, при измерении на частотах, на которых возбуждаются колебания наконечника во время офтальмологической процедуры). Возможно также применение других предельных значений (например, 10-20%, 15-30%, 10-40% и т.п.). В некоторых вариантах осуществления поперечное смещение наконечника (на расчетных рабочих частотах) в дистальной концевой точке 106 может быть приблизительно в диапазоне 30-200 микрометров. Например, если дистальная концевая точка 106 имеет поперечное смещение приблизительно ±0,035 мм во время ультразвуковых крутильных колебаний наконечника 100, то геометрию наконечника можно сформировать так, чтобы максимальное поперечное смещение вдоль стержня было меньше 5 микрометров (возможны также другие смещения). В другом примере, если дистальная концевая точка 106 имеет поперечное смещение приблизительно ±0,055 мм во время ультразвуковых крутильных колебаний наконечника 100, то геометрию наконечника можно сформировать так, чтобы максимальное поперечное смещение вдоль стержня было меньше 8 микрометров. В некоторых вариантах осуществления стержень может продолжаться от конца конического участка 110 (который может быть на расстоянии от, например, приблизительно 12 мм от дистальной концевой точки 106) вплоть до первого изгиба 102 на режущей кромке 106 (который, например, может находиться, на расстоянии приблизительно 5 мм от дистальной концевой точки 106). Предполагаются также возможными другие местоположения первого изгиба 102 (например, на расстоянии 3 мм, 8 мм и т.п. от дистальной концевой точки 106).
На фиг. 2 изображена факоэмульсификационная хирургическая стойка 214, соединенная с рукояткой 204 управления посредством оросительной трубки 206 и аспирационной трубки 208. В некоторых вариантах осуществления для выполнения процедуры факоэмульсификации мощность может подаваться к рукоятке 204 управления по электрическому кабелю 210, и поток по оросительной и аспирационной трубкам 206 и 208 может быть управляемым пользователем (например, с помощью ножного переключателя 212). Один пример рукоятки управления для процедуры факоэмульсификации описан в опубликованной заявке на патент США «Ultrasound Handpiece», Mikhail Boukhny, James Y. Chon, and Ahmad Salehi, № публикации 2006/0041220, заявка № 11/183591, дата подачи 18 июля 2005 г., которая в полном объеме включена в настоящую заявку путем ссылки, как если бы в настоящей заявке было дано ее полное описание.
В некоторых вариантах осуществления рукоятка 204 управления может быть соединена со сбалансированным наконечником 100 для факоэмульсификации. В некоторых вариантах осуществления рукоятка 204 управления может содержать по меньшей мере один набор пьезоэлектрических элементов 227, ориентированных для порождения продольного перемещения, при возбуждении на соответствующей резонансной частоте. Как показано на фиг. 3, пьезоэлектрические кристаллы 227 могут быть подсоединены к ультразвуковому трубчатому толкателю 216, к которому присоединен сбалансированный наконечник 100. Трубчатый толкатель 216 и/или сбалансированный наконечник 100 могут содержать множество диагональных прорезей или канавок 224. Прорези или канавки 224 могут вызывать перемещение закручивания в сбалансированном наконечнике 100, когда пьезоэлектрические кристаллы возбуждают на резонансной частоте. Перемещение сбалансированного наконечника 100, вызываемое канавками 224, зацепляющими неподвижные элементы в рукоятке 204 управления, может содержать крутильную поворотную составляющую относительно осевой линии трубчатого толкателя 216.
Как видно из фиг. 4, в некоторых вариантах осуществления сбалансированный наконечник 100 может быть выполнен по форме для крутильного поворота вперед и назад приблизительно по дуге в диапазоне приблизительно 2-6 градусов (например, 4-градусной дуге). Предполагаются также возможными другие дуги (например, 10-градусная дуга (например, плюс или минус 5 градусов смещения относительно центра (см. среднюю диаграмму 2), плюс или минус 20 градусов смещения относительно центра, плюс или минус 90 градусов смещения относительно центра и т.п.)). В некоторых вариантах осуществления сбалансированный наконечник 100 можно вынуждать совершать ультразвуковые крутильные колебания с частотой приблизительно в диапазоне 10-60 кГц (например, 31 кГц). Предполагаются также возможными другие дуги и частоты. Например, возможно использование дуги плюс или минус 20 градусов и/или частоты 42 кГц. Дуга, показанная на фиг. 4, преувеличена для демонстрации перемещения (т.е. показанная суммарная дуга составляет 180 градусов, тогда как сбалансированный наконечник 100 может характеризоваться 4-градусной дугой). В некоторых вариантах осуществления перемещение наконечника, показанного на фиг. 4, может также содержать продольную составляющую (например, вверх и вниз по оси, параллельной стержню).
Как показано на фиг. 5, при использовании для выполнения факоэмульсификации концы сбалансированного наконечника 100 и оросительного патрубка 226 можно вводить в небольшой разрез 511 в роговице 501, склере 507 или другом местоположении в глазной ткани для получения доступа, например, к передней камере 503 глаза 509. В различных вариантах осуществления участок или весь сбалансированный наконечник 100 может находиться внутри оросительного патрубка 226. Во время процедуры факоэмульсификации участок 513 наконечника 100 вдоль разреза 511 может находиться в тепловом контакте с разрезом 511 (и/или другими частями глаза) через оросительный патрубок 226. В некоторых вариантах осуществления участок 513 вдоль разреза 511 может находиться в непосредственном контакте с разрезом 511 (например, в отсутствие патрубка 226). Сбалансированный наконечник 100 можно вынуждать совершать ультразвуковые крутильные колебания по его продольной оси внутри оросительного патрубка 226 посредством ультразвукового трубчатого толкателя 216 с пьезокристаллическим приводом для превращения, тем самым, выбранной ткани при контакте с ней в эмульсию в месте расположения. Пустой канал сбалансированного наконечника 100 может сообщаться с каналом в трубчатом толкателе, который, в свою очередь, может сообщаться с аспирационной трубкой от рукоятки 204 управления к стойке 214 (например, см. фиг. 2). Сниженное давление или источник вакуума в стойке 214 может всасывать или аспирировать эмульсифицированную ткань из глаза 509 через открытый конец сбалансированного наконечника 100, канал сбалансированного наконечника 100, канал трубчатого толкателя и аспирационную трубку 208 в сборное устройство. Аспирацию эмульсифицированной ткани можно поддерживать с помощью промывного физиологического раствора или оросительного средства, который(ое) можно подавать в операционное поле через небольшой кольцевой зазор между внутренней поверхностью оросительного патрубка 226 и внешней поверхностью сбалансированного наконечника 100.
Как показано на фиг. 6, ультразвуковые крутильные колебания сбалансированного наконечника 100 могут приводить к по меньшей мере двум движениям: 1) поперечному смещению сбалансированного наконечника 100 из положения его равновесия перпендикулярно оси 116, которая коллинеарна с прямолинейным участком стержня (ось 116 можно обозначить как «z-ось») и перпендикулярно оси изгиба наконечника (обозначенной как y-ось на фиг. 1) (y-ось и z-ось формируют плоскость, которая содержит изгиб); 2) угол закручивания вдоль z-оси сбалансированного наконечника 100. Несбалансированный наконечник может иметь значительный изгиб по длине наконечника (в частности, в стержне) под действием крутильных колебаний. Благодаря балансировке наконечника, как поясняется в настоящей заявке, поперечное смещение вдоль стержня наконечника 100 можно уменьшить, тогда как поперечное смещение в дистальной концевой точке 106 наконечника 100 можно увеличить. В наконечнике 100 могут иметь место крутильные колебания (например, закручивание вперед и назад на угол закручивания относительно z-оси), которые могут приводить к относительно большому поперечному смещению дистальной концевой точки 106, в дополнение или в отсутствие поперечного смещения стержня 108.
В некоторых вариантах осуществления балансировка наконечника 100 может содержать исправление геометрии наконечника и физическое тестирование наконечника с исправленной геометрией наконечника, или использование уравнений моделирования, или анализ методом конечных элементов (FEA), чтобы смоделировать колебания наконечника для обнаружения геометрии наконечника, которая имеет следствием уменьшение поперечного смещения вдоль стержня 108, при увеличении поперечного смещения и закручивания в дистальной концевой точке 106 (например, использование такого программного обеспечения, как ANSYS). Геометрические характеристики наконечника могут содержать, например, число изгибов (например, изгибы 102, 104), местоположения изгибов, длину стержня, диаметр стержня 108, длину конического участка 110 и диаметр конического участка. Возможно также видоизменение других геометрических характеристик наконечника. В некоторых вариантах осуществления разные геометрии наконечника можно тестировать, например, созданием наконечников в физической форме с различными геометриями наконечника, возбуждение колебаний наконечников (например, с использованием частот и мод, которые используют во время факоэмульсификации) и контроль поперечного смещения и/или нагрева, создаваемых при различных геометриях наконечника. Одна или более итераций испытания разных геометрий наконечника (например, посредством закрепления местоположения одного изгиба на наконечнике и тестирования разных наконечников с разными местоположениями и кривизной второго изгиба) могут привести к определению одной или более оптимизированных геометрий наконечника. Возможны также другое число изгибов и геометрических видоизменений (например, изменение местоположений обоих изгибов при сохранении постоянной кривизны обоих изгибов, изменение местоположений и кривизны изгибов, изменение числа изгибов, изменение длины стержня, изменение длины конического участка, изменение радиуса стержня, изменение радиусов конического участка и т.п.).
В некоторых вариантах осуществления для тестирования разных геометрий наконечника можно воспользоваться уравнениями моделирования (вместо или в дополнение к анализу методом конечных элементов (FEA) и/или физического тестирования). Например, уравнения, описывающие, как изменяются угол закручивания (ϕ) и поперечное смещение (ux) вдоль z-оси при возбуждении ультразвуковых крутильных колебаний прямолинейного (преимущественно, цилиндрического) наконечника (например, на основе общей теории упругости), могут быть представлены в следующем виде (см. также фиг. 7a-b):







Где ϕ обозначает угол закручивания наконечника, ρ обозначает плотность материала наконечника, I(z) обозначает момент инерции сечения цилиндрического наконечника вокруг z-оси, R1(z) обозначает внутренний радиус полой внутренней секции цилиндрического корпуса наконечника (если цилиндрический корпус является сплошным, то R1(z) может быть равен 0 вдоль всей z-оси); R2(z) обозначает внешний радиус цилиндрического корпуса наконечника; t обозначает время, ux обозначает поперечное смещение вдоль x-оси, S(z) обозначает площадь сечения цилиндрического наконечника вдоль z-оси, E обозначает модуль Юнга материала наконечника, Iy(z) обозначает момент инерции сечения цилиндрического наконечника вокруг y-оси, и µ обозначает модуль упругости при кручении материала наконечника. Такие характеристики, как ρ, могут быть одинаковыми для всего наконечника, тогда как такие характеристики, как R1(z) и R2(z), могут изменяться вдоль z-оси (и, следовательно, могут быть представлены, например, в виде массива значений). Уравнения, описывающие, как изменяются угол (ϕ) и поперечное смещение (ux) вдоль z-оси, при возбуждении ультразвуковых крутильных колебаний криволинейного (преимущественно, цилиндрического) наконечника (например, наконечника с изгибами 102/104), могут быть представлены в следующем виде (см. также фиг. 7a-b):



Где ϕ обозначает угол закручивания наконечника, ρ обозначает плотность материала наконечника, I(z) обозначает момент инерции сечения цилиндрического наконечника вокруг z-оси, R1(z) обозначает внутренний радиус полой внутренней секции цилиндрического корпуса наконечника (если цилиндрический корпус является сплошным, то R1(z) может быть равен 0); R2(z) обозначает внешний радиус цилиндрического корпуса наконечника; t обозначает время, ux обозначает поперечное смещение вдоль x-оси, S(z) обозначает площадь сечения цилиндрического наконечника вдоль z-оси, E обозначает модуль Юнга материала наконечника, Iy(z) обозначает момент инерции сечения цилиндрического наконечника вокруг y-оси, µ обозначает модуль упругости при кручении материала наконечника и l(z) обозначает поперечное смещение вдоль y-оси, показанное на фиг. 7с. В некоторых вариантах осуществления одни или более из входных данных и/или уравнений могут быть изменены для учета присутствия среды, в которой колеблется наконечник (например, воды, стекловидного тела и т.п.). Например, уравнение для поперечного смещения наконечника можно видоизменить следующим образом:

Где γ обозначает эмпирический параметр, который представляет диссипацию, обусловленную средой (например, водой). Значение γ можно корректировать для подгонки уравнения соответственно измеренным смещениям существующих наконечников в среде. Член ρMediaSMedia(z) в знаменателе представляет увеличение массы наконечника, обусловленное средой, которая повторяет движение наконечника. Член ρMedia представляет плотность среды, и член SMedia(z) представляет площадь сечения среды, двигающейся вместе с наконечником и может быть вычислен с использованием теории идеальной жидкости из выражения: 
В некоторых вариантах осуществления вместе с различными характеристиками наконечника (например, ρ, E и т.п.), геометрические характеристики (например, S(z), I(z), C(z), Iy(z) и т.п.) могут быть введены пользователем или вычислены с использованием программного обеспечения моделирования (например, Matlab™) по другим входным данным, обеспеченным пользователем (например, пользователь может представить внутренний радиус (если наконечник является полым в центре), внешний радиус наконечника вдоль z-оси, местоположение (например, начальную и конечные точки (вдоль z-оси) и кривизну одного или более изгибов и т.п.). Пользователь может также вычертить форму наконечника с использованием графического пользовательского интерфейса (см., например, входные графики на фиг. 8a-b), пользователь может предварительно загрузить геометрию наконечника (например, трехмерное изображение) и т.п. В некоторых вариантах осуществления внешний радиус может быть большим при небольших значениях z (т.е. на коническом участке наконечника) и относительно небольшим на конце наконечника. Предполагаются возможными также другие входные данные.
В некоторых вариантах осуществления решения для ϕ и ux из вышеприведенных уравнений можно применить для исследования поперечного смещения и углов закручивания вдоль z-оси для разных геометрий наконечника, и из нескольких геометрий наконечника можно выбрать геометрию сбалансированного/скорректированного наконечника, которая максимизирует поперечное смещение ux и угол ϕ закручивания дистальной концевой точки 106 при минимизации поперечного смещения ux по длине наконечника (например, вдоль стержня 108). В некоторых вариантах осуществления решение для ϕ и ux может содержать использование гармонического анализа. Решение уравнений для ϕ и ux может обеспечить угол закручивания и/или поперечные смещения в виде функций как z, так и t (например, u(z,t) и ϕ(z,t)). Затем данные решения можно использовать для моделирования наконечника в соответствии с гармонической силой. Моделирование в соответствии с гармонической силой может содержать моделирование наконечника, как будто наконечник колеблется на некоторой частоте ω по закону cos(ωt). Таким образом, гармонические функции можно использовать для упрощения уравнений моделирования для u(z,t) и ϕ(z,t) в соответствии с вышеприведенными уравнениями для 

На фиг. 8a-b представлены входные формы наконечников и соответствующие смещения и углы закручивания по длине наконечника в соответствии с вышеприведенными уравнениями моделирования. В некоторых вариантах осуществления положение и кривизну первого изгиба 102 можно выбирать на основании различных факторов, например, с учетом эргономичности и изготовления. Второй изгиб 104 может находиться ближе к режущей кромке 106 сбалансированного наконечника 100. Затем можно выбрать кривизну данного изгиба с использованием прогноза, полученного из вышеприведенных уравнений моделирования. Затем полученную форму наконечника можно проверить и/или скорректировать посредством выполнения аналитического моделирования методом конечных элементов. Теоретически кривизна может быть такой, что мода крутильных колебаний и мода изгибных колебаний сбалансированного наконечника 100 не связаны между собой. Движение сбалансированного наконечника 100 под действием скручивающей силы может быть таким же, как в его моде крутильных колебаний. В некоторых вариантах осуществления изгибы наконечника (например, 102/104) могут быть расположены так, что энергия ультразвуковых крутильных колебаний в сбалансированном наконечнике 100 может быть распределена в моде крутильных колебаний вдоль значительного участка стержня 108 (при уменьшенном поперечном движении). В некоторых вариантах осуществления длину стержня 108 также можно корректировать для настройки моды крутильных колебаний таким образом, что крутильные колебания находятся в резонансе с ультразвуковым приводным механизмом (например, пьезоэлектрическим элементом 227 в рукоятке управления, объединенной с трубчатым толкателем) для увеличения смещений закручивания в дистальной концевой точке 106.
В некоторых вариантах осуществления амплитуда поперечного смещения дистальной концевой точки сбалансированного наконечника 100 может зависеть от резонанса между скручивающей движущей силой и модой крутильных колебаний. Хотя частота возбуждения может задаваться конструкцией крутящего трубчатого толкателя, частоту моды крутильных колебаний можно скорректировать выбором, например, длины конической части 110 сбалансированного наконечника 100. Длину конической части 110 можно подобрать для максимизации крутильных колебаний сбалансированного наконечника 100, приводящей тем самым к максимальному смещению закручивания дистальной концевой точки 106. Возможно также изменение других характеристик наконечника.
В некоторых вариантах осуществления сбалансированный наконечник 100 может иметь диаметр в диапазоне приблизительно 0,5 мм - 2 мм (например, равный 1,5 мм). В некоторых вариантах осуществления сбалансированный наконечник 100 может иметь диаметр приблизительно 1,5 мм в верхней части наконечника и диаметр 0,9 мм вблизи дистального конца наконечника (предполагаются также возможными другие диаметры и конфигурации). В одном варианте осуществления сбалансированный наконечник 100 может иметь длину приблизительно 1 и 3/8 дюймов (34,4 мм), и изгибы 102, 104 могут находиться на дистальных приблизительно 1/8 и 2/8 дюймах (3,25 и 6,5 мм). Предполагаются также возможными другие размеры. В некоторых вариантах осуществления первый изгиб 102 может составлять угол приблизительно в диапазоне -10 - -30 градусов, тогда как второй изгиб 104 может составлять угол приблизительно в диапазоне 20-50 градусов. Предполагаются также возможными другие углы. Участок 112 режущего края может иметь расширяющийся, сужающийся и/или скошенный конец (в некоторых вариантах осуществления участок 112 режущего края может быть плоским). Сбалансированный наконечник 100 может быть выполнен из нержавеющей стали или титана (возможно также использование других материалов). Сбалансированный наконечник 100 может иметь общую длину от 0,50 дюймов (12,7 мм) до 1,50 дюймов (28,1 мм) (например, 1,20 дюймов (30,5 мм)). Предполагаются также возможными другие длины. Сбалансированный наконечник 100 может быть сформирован с использованием обычной технологии металлообработки и может быть подвергнут электрополировке. Стержень 108 может быть в общем трубчатым с внешним диаметром от 0,005 дюймов (0,13 мм) до 0,100 дюймов (2,54 мм) и внутренним диаметром от 0,001 дюймов (0,025 мм) до 0,09 дюймов (2,30 мм) (полагаются также возможными другие диаметры).
На фиг. 9 представлена блок-схема последовательности операций способа определения геометрии наконечника в соответствии с одним вариантом осуществления. Элементы, представленные на блок-схеме последовательности операций, являются всего лишь наглядными. Различные представленные элементы можно исключать, дополнительные элементы можно вводить и/или различные элементы можно выполнять в порядке, отличающемся от приведенного ниже порядка.
На этапе 901 в систему можно ввести геометрию наконечника. Например, входные данные геометрии могут хранить во входном файле. В некоторых вариантах осуществления геометрия наконечника может содержать одни или более из следующих данных, задаваемых как геометрические значения в слоях наконечника (например, наконечник может быть секционирован на 500 слоев, и геометрические характеристики наконечника в каждом слое могут сохраняться в отдельном массиве, присвоенном соответствующей геометрической переменной). Например, геометрические характеристики слоев наконечника могут содержать кривизну (например, в градусах), жесткость при кручении (например, C(z)), момент инерции вокруг x-оси (например, I(z)), площадь сечения (например, S(z)), момент инерции слоя вокруг y-оси, который обуславливает жесткость при изгибе наконечника (например, Iy(z)), расстояние наконечника от z-оси (например, l(z)). Предполагаются также возможными другие входные данные.
В некоторых вариантах осуществления массивы на основе упомянутых слоев могут быть введены непосредственно пользователем или могут быть вычислены по другим геометрическим входным данным. Например, пользователь может обеспечить длину наконечника, длину конического участка, местоположение вдоль наконечника, в котором начинается изгиб, местоположение вдоль наконечника, в котором заканчивается изгиб, кривизну первого изгиба, местоположение вдоль наконечника, в котором начинается второй изгиб, местоположение вдоль наконечника, в котором заканчивается второй изгиб, кривизну второго изгиба, модуль упругости при сдвиге материала наконечника, модуль Юнга материала наконечника, плотность материала наконечника и т.п., и конкретные входные данные для разных слоев можно вычислять и сохранять во входном файле или представлять в программного обеспечение моделирования. В некоторых вариантах осуществления компьютерная система может генерировать входные данные автоматически. Например, компьютерная система может циклически повторять различные итерации для возможных геометрий наконечника. В некоторых вариантах осуществления пользователь может вычертить наконечник (например, при посредстве графического пользовательского интерфейса), и компьютерная система может вычислить геометрию по чертежу. Предполагаются также возможными другие виды ввода.
На этапе 903 система может использовать уравнения моделирования и гармонический анализ для определения поперечного смещения и угла закручивания по длине наконечника для данных геометрии наконечника и ультразвуковой частоты крутильных колебаний (например, приблизительно 31 кГц). Предполагаются также возможными другие частоты. Например, уравнения
можно решить для ux и ϕ с использованием входных данных (вышеописанных) и гармонического анализа (например, с использованием гармонических функций с u(z)cos(ωt), ϕ(z)cos(ωt)) для упрощения результатов путем исключения времени. В соответствии с гармоническим анализом в некоторых вариантах осуществления можно допустить, что:
ux(z,t)=u(z)cos(ωt), и ϕ(z,t)=ϕ(z)cos(ωt).
Посредством взятия производной по времени:
cos(ωt)″=-ω2cos(ωt)
и ее подстановки в исходные уравнения и сокращения косинуса от времени можно получить уравнения, не зависящие от времени:


Затем вышеприведенные уравнения можно решить для амплитуд смещения u(z) и угла φ(z) закручивания. Можно также применить другие уравнения для решения относительно ux.
На этапе 905 система может построить график одного или более из поперечного смещения и/или угла закручивания для геометрии наконечника (см., например, фиг. 8a-8b).
На этапе 907 пользователь (или система) может обеспечить вторую геометрию наконечника (или видоизменить первую геометрию наконечника) и повторно вычислить поперечное смещение (ux) и угол (ϕ) закручивания по длине наконечника. Можно также применить другие методы моделирования. Например, для определения поперечного смещения (ux) и угла (ϕ) закручивания по длине наконечников с различными геометриями, приводимых в состояния с различными колебаниями, можно воспользоваться анализом методом конечных элементов (FEA). Кроме того, можно также воспользоваться другими уравнениями (например, для моделирования квадратного наконечника можно применить отличающиеся уравнения).
На этапе 909, характеристики нескольких наконечников с разными геометриями можно вычислять по этапам 901-907 и сравнивать для выбора одной из геометрий наконечника (или формирования новой геометрии наконечника для анализа). Выбор одной из геометрий наконечника может содержать выбор геометрии наконечника на основании того, которая из геометрий наконечника характеризуется наименьшим поперечным смещением вдоль участка стержня наконечника, сформированного для нахождения вдоль разреза в глазу во время процедуры факоэмульсификации. В некоторых вариантах осуществления если поперечное смещение (анализируемых геометрий наконечника) вдоль участка стержня наконечника, сформированного для нахождения вдоль разреза в глазу во время процедуры факоэмульсификации (например, на протяжении участка стержня, который продолжается от проксимального конца стержня (например, конца конического участка) до первого изгиба участка режущего края), больше чем приблизительно 5-25% (например, 15%) от поперечного смещения дистальной концевой точки 106 (возможно также применение других предельных значений (например, 1 микрометр, 2 микрометра, 100 микрометров, 2 мм и т.п.)), то можно сформировать другую геометрию наконечника, поперечное смещение новой геометрии наконечника можно смоделировать и сравнить с одним или более из поперечных смещений первой или второй геометрии наконечника для дополнительного выбора из первой, второй и новой геометрий (после чего можно выбрать один из наконечников или можно сформировать другую геометрию наконечника с целью сравнения).
В некоторых вариантах осуществления формирование новых геометрий может содержать видоизменение ранее тестированных геометрий для дополнительного моделирования. В некоторых вариантах осуществления пользователь может дополнительно видоизменить выбранную геометрию наконечника для подстройки геометрии в соответствии с дополнительными критериями. Например, пользователь может изменить длину конической части 110 (или другие геометрические характеристики, например, длину стержня) для увеличения крутильных колебаний сбалансированного наконечника 100, чтобы обеспечить большее поперечное смещение дистальной концевой точки 106. В некоторых вариантах осуществления пользователь может пробовать разные местоположения и значения кривизны одного или более из изгибов, чтобы уменьшать поперечное смещение к проксимальному концу наконечника, при одновременном увеличении поперечного смещения к дистальному концу наконечника. Видоизменения можно применять для третьего, четвертого и т.п. наконечника, и результаты можно сравнивать с результатами для предыдущих наконечников, чтобы оптимизировать выбор геометрических характеристик наконечника.
На фиг. 10 показана блок-схема последовательности операций другого способа определения геометрии наконечника в соответствии с одним вариантом осуществления. Элементы, представленные на блок-схеме последовательности операций, являются всего лишь наглядными. Различные представленные элементы можно исключать, дополнительные элементы можно вводить, и/или различные элементы можно выполнять в порядке, отличающемся от приведенного ниже порядка.
На этапе 1001 первый наконечник, имеющий первую геометрию, может быть физически сконструирован или смоделирован (например, с использованием анализа методом конечных элементов). В некоторых вариантах осуществления первый наконечник может иметь круглое сечение, квадратное сечение или сечение, которое изменяется вдоль оси наконечника.
На этапе 1003 первый наконечник можно заставить колебаться в режиме, подобном режиму процедуры факоэмульсификации (например, посредством закрепления в рукоятке управления факоэмульсификацией, как показано на фиг. 2-3, и возбуждения в режиме колебаний с частотой, приблизительно 31 кГц и/или «возбуждения в режиме колебаний» с использованием программного обеспечения моделирования, например, ANSYS). Предполагаются также возможными другие частоты (например, приблизительно от 10 кГц и 60 кГц). В некоторых вариантах осуществления первый наконечник можно закреплять к рукоятке управления факоэмульсификацией для возбуждения в режиме колебаний. В некоторых вариантах осуществления наконечник можно закреплять к другому устройству (например, испытательному приспособлению) для приложения колебаний. В некоторых вариантах осуществления конец первого наконечника можно помещать в воду или материал с подобными характеристиками, например стекловидное тело (предполагаются также возможными другие жидкости). В некоторых вариантах осуществления первый наконечник может содержать два изгиба (например, 102, 104). Предполагаются также возможными другие числа изгибов.
На этапе 1005 первый наконечник можно анализировать в состоянии колебаний. Например, для определения поперечного смещения (ux) и/или угла (ϕ) закручивания (или характеристик, указывающих поперечное смещение (ux) и/или угол (ϕ) закручивания) для наконечника можно воспользоваться методами формирования инфракрасных изображений, стробоскопии, физического измерения смещения и т.п. Например, при тепловом сканировании колеблющегося наконечника, местоположения более высокого нагрева по длине наконечника могут указывать на большие поперечные смещения (ux).
На этапе 1007 можно сконструировать второй наконечник (например, можно видоизменить геометрию первого наконечника). Видоизменения можно вносить в разные геометрические характеристики, как предусмотрено выше. Например, можно изменить местоположение и/или кривизну второго изгиба 104.
На этапе 1009 второй наконечник можно заставить колебаться в таком же режиме, как первый наконечника.
На этапе 1011 второй наконечник можно анализировать во время колебаний для определения характеристик (например, поперечного смещения и угла закручивания), которые определяли для первого наконечника.
На этапе 1013 характеристики первого наконечника и второго наконечника можно сравнивать, и одну из первой и второй геометрий наконечника можно выбрать, или новую геометрию наконечника можно сформировать и тестировать с целью сравнения. Например, выбор первой геометрии наконечника или второй геометрии наконечника может быть основан на том, которая из геометрий наконечника характеризуется наименьшим поперечным смещением вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации. В некоторых вариантах осуществления если поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации (например, на протяжении участка стержня, который продолжается от проксимального конца стержня (например, конца конического участка) до первого изгиба участка режущего края), больше чем приблизительно 5-25% (например, 15%) (как отмечено выше, возможно также применение других предельных значений) от смещения дистальной концевой точки 106 наконечника, то можно сформировать и испытать третий наконечник. Поперечное смещение и/или угол закручивания третьей геометрии наконечника можно определять и сравнивать с поперечным смещением и/или углом закручивания первой или второй геометрии наконечника для дополнительного выбора из первой, второй и третьей геометрий наконечника (после чего можно выбрать один из наконечников, или можно сформировать другую геометрию наконечника с целью сравнения).
На фиг. 11 приведена сводка шести возможных вариантов осуществления сбалансированного наконечника (возможны также другие варианты осуществления). Сбалансированный наконечник 100 может иметь геометрию в соответствии с одним из наборов параметров, представленных в таблице на фиг. 11. Сбалансированный наконечник 100 может иметь внешний диаметр OD дюймов; диаметр внутреннего канала ID дюймов; суммарную длину L дюймов от втулки (проксимального конца наконечника 100, который выполнен с возможностью закрепления к ультразвуковому трубчатому толкателю) до режущей кромки 106 наконечника 100. Конический участок 110 наконечника 100 может продолжаться на Lc дюймов от втулки. Первый изгиб 102 наконечника 100 может составлять угол α1 градусов и продолжаться между точками, расположенными на расстоянии x1 и x2 дюймов от дистальной концевой точки 106. Второй изгиб 104 может составлять угол α2 градусов и продолжаться между точками, расположенными на расстоянии y1 и y2 дюймов от дистальной концевой точки 106. Участок 112 режущего края может иметь скошенную кромку (т.е. на наиболее удаленной дистальной кромке участка режущего края), которая обращена вверх под углом 30 или 45 градусов или обращена вниз под углом 30 градусов, как указано в таблице (например, скос, показанный на фиг. 1, обращен вниз).
В некоторых вариантах осуществления система моделирования может содержать один или более процессоров. Процессор может содержать единственное устройство обработки данных или множество устройств обработки данных. Данное устройство обработки данных может быть микропроцессором, контроллером (который может быть микроконтроллером), цифровым сигнальным процессором, микрокомпьютером, центральным процессором, логической матрицей с эксплуатационным программированием, программируемым логическим устройством, конечным автоматом, логическими схемами, схемами управления, аналоговыми схемами, цифровыми схемами и/или любым устройством, которое манипулирует с сигналами (аналоговыми и/или цифровыми) на основании действующих команд. Память, связанная с процессорами и/или встроенная в них, может представлять собой одно запоминающее устройство или множество запоминающих устройств. Упомянутое запоминающее устройство может быть постоянной памятью, памятью с произвольной выборкой, энергозависимой памятью, энергонезависимой памятью, статической памятью, динамической памятью, флэш-памятью, кэш-памятью и/или любым устройством, которое сохраняет цифровую информацию. Следует отметить, что, когда процессоры реализуют одну или более из своих функций посредством конечного автомата, аналоговых схем, цифровых схем и/или логических схем, память, хранящая соответствующие действующие команды, может быть встроена или находиться снаружи схем, содержащих конечный автомат, аналоговые схемы, цифровые схемы и/или логические схемы. Память может хранить, и процессор может исполнять действующие команды, соответствующие по меньшей мере некоторым из элементов, изображенных и описанных в связи с фигурами (например, фиг. 9 и 10).
Специалистом в данной области техники могут быть созданы различные модификации настоящих вариантов осуществления. В результате изучения настоящего описания и практического применения предложенного в нем настоящего изобретения специалистам в данной области техники станут также очевидны другие варианты осуществления настоящего изобретения. Настоящее описание и примеры следует считать лишь наглядными, при этом истинные объем и сущность изобретения указаны в нижеследующей формуле изобретения и ее эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СБАЛАНСИРОВАННЫЙ НАКОНЕЧНИК ДЛЯ ФАКОЭМУЛЬСИФИКАЦИИ | 2011 |
|
RU2711331C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2019 |
|
RU2783732C2 |
| УЛЬТРАЗВУКОВАЯ РУКОЯТКА СО СМЕЩЕНИЕМ | 2009 |
|
RU2502495C2 |
| СИСТЕМЫ И СПОСОБЫ АСПИРАЦИИ С ТРУБКАМИ МАЛОГО ДИАМЕТРА | 2011 |
|
RU2586738C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ РАССЕЧЕНИЯ И КОАГУЛЯЦИИ | 2013 |
|
RU2669023C2 |
| Способ аспирации кортикальных масс и устройство для его осуществления | 2017 |
|
RU2679305C1 |
| РАЗДЕЛЕННЫЕ УРАВНОВЕШИВАЮЩИЕ ГРУЗЫ ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ПЛОТНОСТИ НА ИЗМЕРЕНИЕ РАСХОДА | 2004 |
|
RU2348906C2 |
| ОПТИЧЕСКОЕ СЧИТЫВАНИЕ ПОЛОЖЕНИЯ И/ИЛИ ФОРМЫ | 2010 |
|
RU2541139C2 |
| НАКОНЕЧНИК ДЛЯ ДРОБЛЕНИЯ, УСТРОЙСТВО ДЛЯ ВНУТРИГЛАЗНЫХ ХИРУРГИЧЕСКИХ ОПЕРАЦИЙ, СНАБЖЕННОЕ ТАКИМ НАКОНЕЧНИКОМ, СПОСОБ ПОДАВЛЕНИЯ ВОЗНИКНОВЕНИЯ КАВИТАЦИИ И СПОСОБ ВЫПОЛНЕНИЯ ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ ПО УДАЛЕНИЮ КАТАРАКТЫ | 2012 |
|
RU2599681C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОФТАЛЬМОЛОГИЧЕСКОЙ ОПЕРАЦИИ | 2014 |
|
RU2618184C2 |







Изобретение относится к медицине. Наконечник для факоэмульсификации включает стержень и участок режущего края, который имеет, по меньшей мере, первый и второй изгибы. Геометрия наконечника выполнена с возможностью приводить к поперечному смещению перпендикулярно стержню во время ультразвуковых крутильных колебаний наконечника с частотами от 10 кГц до 60 кГц. Поперечное смещение перпендикулярно стержню меньше чем 5-25% (например, 15%) от поперечного смещения в дистальной концевой точке наконечника на протяжении участка стержня, продолжающегося от конца конического участка наконечника до первого изгиба на участке режущего края наконечника. Для определения геометрии наконечника применяют программное обеспечение и/или физическое моделирование. 3 н. и 17 з.п. ф-лы, 11 ил.
1. Наконечник для факоэмульсификации, содержащий:
стержень, имеющий проксимальный конец и дистальный конец; участок режущего края на дистальном конце стержня, при этом
участок режущего края содержит по меньшей мере первый и второй изгибы;
причем геометрия стержня и по меньшей мере первого и второго изгибов выполнена с возможностью приводить к поперечному смещению стержня перпендикулярно стержню во время ультразвуковых крутильных колебаний наконечника, которое меньше чем приблизительно 5-25% от поперечного смещения в дистальной концевой точке наконечника, на протяжении участка стержня, который продолжается от проксимального конца стержня до первого изгиба участка режущего края.
2. Наконечник для факоэмульсификации по п. 1, в котором поперечное смещение (ux) задается с использованием уравнения
в котором
ϕ обозначает угол закручивания наконечника,
ρ обозначает плотность материала наконечника,
S(z) обозначает площадь сечения наконечника вдоль оси, коллинеарной со стержнем,
Е обозначает модуль Юнга материала наконечника,
Iy(z) обозначает момент инерции сечения наконечника вокруг оси, перпендикулярной оси, коллинеарной со стержнем,
l(z) обозначает поперечное смещение вдоль оси, перпендикулярной оси, коллинеарной со стержнем.
3. Наконечник для факоэмульсификации по п. 2, в котором ϕ обеспечивается уравнением
 где
где
I(z) обозначает момент инерции сечения цилиндрического наконечника вокруг оси, коллинеарной с наконечником, C(z)=l(z)*µ, и µ обозначает модуль упругости при кручении материала наконечника.
4. Наконечник для факоэмульсификации по п. 3, в котором уравнения

и

решаются методом гармонического анализа.
5. Наконечник для факоэмульсификации по п. 4, в котором проксимальный конец наконечника содержит конический участок, и при этом длина конического участка выбрана с возможностью усиления крутильных колебаний наконечника во время ультразвуковых крутильных колебаний, чтобы обеспечить большее поперечное смещение в дистальной концевой точке наконечника.
6. Наконечник для факоэмульсификации по п. 1, в котором поперечное смещение наконечника в дистальной концевой точке наконечника находится приблизительно в диапазоне 40-200 микрометров.
7. Способ определения геометрии наконечника для факоэмульсификации, содержащий этапы, на которых:
обеспечивают первую геометрию наконечника;
моделируют поперечное смещение первой геометрии наконечника во время ультразвуковых крутильных колебаний наконечника;
обеспечивают вторую геометрию наконечника;
моделируют поперечное смещение второй геометрии наконечника во время ультразвуковых крутильных колебаний наконечника;
сравнивают поперечное смещение первой геометрии наконечника и поперечное смещение второй геометрии наконечника; и
выбирают первую геометрию наконечника или вторую геометрию наконечника на основании того, какая из геометрий наконечника имеет меньшее поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации.
8. Способ по п. 7, в котором характеристики первого наконечника содержат по меньшей мере:
l(z) в качестве поперечного смещения от прямолинейной геометрии,
ρ в качестве плотности материала наконечника,
I(z) в качестве момента инерции сечения цилиндрического наконечника вокруг оси, коллинеарной со стержнем наконечника,
S(z) в качестве площади сечения наконечника вдоль оси, коллинеарной со стержнем,
Е в качестве модуля Юнга материала наконечника,
Iy(z) в качестве момента инерции сечения наконечника вокруг оси, перпендикулярной оси, коллинеарной со стержнем,
C(z)=I(z)µ, и
µ в качестве модуля упругости при кручении материала наконечника.
9. Способ по п. 8, в котором моделирование поперечного смещения (ux) геометрии наконечника во время ультразвуковых крутильных колебаний наконечника содержит этап, на котором определяют поперечное смещение наконечника в соответствии с уравнениями
 и
и

10. Способ по п. 7, в котором первая и вторая геометрии наконечника содержат конический участок, и при этом способ дополнительно содержит этап, на котором моделируют крутильные колебания наконечника в соответствии с уравнением

и этап, на котором определяют длину конического участка, которая приводит к усилению крутильных колебаний наконечника во время ультразвуковых крутильных колебаний, чтобы обеспечить большее поперечное смещение в дистальной концевой точке наконечника.
11. Способ по п. 7, в котором первая и вторая геометрии наконечника включают в себя по меньшей мере первый и второй изгибы, и при этом первая и вторая геометрии наконечника включают в себя разные местоположение или кривизну второго изгиба.
12. Способ по п. 7, дополнительно содержащий этап, на котором определяют, является ли поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации, меньшим чем приблизительно 15% от поперечного смещения дистальной концевой точки.
13. Способ по п. 11, дополнительно содержащий этап, на котором, если поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации, является большим чем приблизительно 15% от поперечного смещения дистальной концевой точки, формируют третью геометрию наконечника, этап, на котором моделируют поперечное смещение третьей геометрии наконечника, и этап, на котором сравнивают поперечное смещение третьей геометрии наконечника по меньшей мере с одним из поперечных смещений первой или второй геометрии наконечника.
14. Способ определения геометрии наконечника для факоэмульсификации, содержащий этапы, на которых:
обеспечивают первый наконечник с первой геометрией наконечника;
возбуждают ультразвуковые крутильные колебания первой геометрии наконечника;
определяют поперечное смещение вдоль геометрии наконечника во время ультразвуковых крутильных колебаний первого наконечника;
обеспечивают второй наконечник со второй геометрией наконечника;
возбуждают ультразвуковые крутильные колебания второй геометрии наконечника;
определяют поперечное смещение вдоль второй геометрии наконечника во время ультразвуковых крутильных колебаний второго наконечника;
сравнивают поперечное смещение первой геометрии наконечника и поперечное смещение второй геометрии наконечника; и
выбирают первую геометрию наконечника или вторую геометрию наконечника на основании того, какая из геометрий наконечника имеет меньшее поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации.
15. Способ по п. 14, в котором выбор первой или второй геометрии наконечника дополнительно содержит этап, на котором определяют, какая из первой геометрии наконечника и второй геометрии наконечника имеет меньшее поперечное смещение стержня наконечника на участке стержня, продолжающемся от проксимального конца стержня до по меньшей мере половины длины стержня.
16. Способ по п. 14, в котором первая и вторая геометрии наконечника включают в себя по меньшей мере первый и второй изгибы.
17. Способ по п. 16, в котором первая и вторая геометрии наконечника включают в себя разные соответствующие местоположения или значения кривизны второго изгиба.
18. Способ по п. 14, дополнительно содержащий этап, на котором определяют, является ли поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации, меньшим чем приблизительно 5-25% от поперечного смещения в дистальной концевой точке наконечника.
19. Способ по п. 18, дополнительно содержащий этап, на котором, если поперечное смещение вдоль участка стержня наконечника, выполненного с возможностью нахождения вдоль разреза в глазу во время процедуры факоэмульсификации, является большим чем приблизительно 5-25% от поперечного смещения в дистальной концевой точке наконечника, формируют третью геометрию наконечника, этап, на котором моделируют поперечное смещение третьей геометрии наконечника, и этап, на котором сравнивают поперечное смещение третьей геометрии наконечника по меньшей мере с одним из поперечных смещений первой или второй геометрии наконечника.
20. Способ по п. 14, в котором определение поперечного смещения геометрии наконечника содержит этап, на котором используют по меньшей мере одно из формирования инфракрасных изображений, стробоскопии или физического измерения смещения.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Способ получения высыхающих препаратов | 1940 |
|
SU62013A1 |
| Способ получения карбида кремния | 1939 |
|
SU64054A1 |
| УСТРОЙСТВО ДЛЯ ФРАГМЕНТИРОВАНИЯ ЯДРА ХРУСТАЛИКА | 1998 |
|
RU2167635C2 |
| DE 3416490 C1, 27.02.1986. | |||

