Область техники, к которой относится изобретение
Настоящее изобретение направлено на определение времени прибытия поперечной волны и, конкретнее, на определение его на основании сдвига, вызванного поперечной волной.
Уровень техники, к которому относится изобретение
Механические изменения в живой ткани коррелируют с патологическими изменениями. У здоровой и пораженной ткани модуль упругого сдвига (ригидность) и вязкость могут значительно отличаться. С появлением ультразвуковой визуализации эластичности, развивающейся в последнее десятилетие многие клинические исследования показали, что из вязкоэластичных свойств ткани врачи получают полезную информацию для лучшей диагностики рака и планирования терапии. Один из методов измерения механических свойств ткани - это ультразвуковая поперечноволновая эластография. В ней используется акустическое излучение (ARF) для генерации поперечных волн в мягкой ткани и последующего отслеживания сдвига поперечной волны для оценки эластичности и вязкости ткани. Одно из применений этого метода - неинвазивное измерение ригидности печени на стадии фиброза и цирроза печени.
При исследовании при помощи ультразвука для целей медицинской визуализации часто используют продольные волны. В тканях организма ультразвук распространяется в виде волны. По существу, частицы вдоль всего пути распространения волны фактически вибрируют на месте, колеблясь взад и вперед; вибрация происходит в направлении распространения. Вибрация приводит к сжатиям и разрежениям. Они отвечают пикам и впадинам на синусоиде. Энергия переносится к цели и обратно в виде колебательных движений частиц.
Ультразвуковая поперечная (или сдвиговая) волна, напротив, отличается возвратно-поступательным локальным движением, перпендикулярным направлению распространения. Колебания в одну сторону отвечают пикам, а в другую - впадинам. Волна содержит компоненты, каждая из которых колеблется на собственной частоте. Определяют скорость распространения пакета волн или "групповую скорость".
Сначала испускается сфокусированный исходный импульс продольных волн. Это сигнал с высокой интенсивностью, большой продолжительностью и узкой полосой. Исходный импульс создает поперечную волну. Вначале выбирают глубину фокуса такой, чтобы поперечная волна проходила через изучаемую область (ROI). Направленные лучи можно выпускать много раз для многих измерений для повышения точности оценки скорости поперечной волны. Типичная частота импульсов составляет 100 Гц.
В ROI выпускают импульс слежения из продольных волн для оценки в пробной точке (или "боковой области") амплитуды поперечной волны в некоторый период наблюдения (порядка 10 мс). Сдвиг измеряют в ткани организма перпендикулярно поперечному направлению распространения поперечной волны при распространении наружу от области возбуждения (ROE) у фокуса импульса. Период времени между сдвигом пика и исходным импульсом называется временем до пика (TTP). Пример метода TTP представлен в публикации патента США № 2008/0249408, авторы Пальмери и сотр. (далее, "Пальмери"), который целиком включен в настоящий документ в виде ссылки.
TTP определяется сходным образом для ряда боковых точек, расположенных по прямой линии вдоль траектории распространения, наружу от ROE. Можно определить задержки во времени между пиками в различных местоположениях, как в методе акустической лучевой импульсной визуализации (ARFI).
На основании известных расстояний между боковыми местоположениями можно оценить функциональную зависимость между расстоянием, на которое распространяется поперечная волна, и временем, в которое она проходит это расстояние.
От местоположения до точки при распространении поперечной волны наружу от ROE сдвиги снижаются под действием геометрического расхождения и вязкости. Таким образом, простое детектирование от местоположения к точке при достижении заданного сдвига нецелесообразно для определения групповой скорости.
По этой причине в TTP принимается, что волна прибывает или проходит через боковую точку, когда в этой точке наблюдается пик сдвига волны. Далее, считается, что пик сдвига вне ROE перемещается с групповой скоростью поперечной волны.
Пальмери считает, что эти предположения верны для совершено эластичных или слабодисперсных сред.
Сущность изобретения
В настоящем изобретении предлагается следующее после решения одной или нескольких проблем, описанных выше.
Авторы настоящего изобретения отметили, что время прибытия волны в точку можно охарактеризовать временем, для которого центр масс (COM) местоположения волны располагается в точке, и что метод COM позволяет получить значения скорости поперечной волны ближе к экспериментальным данным, чем метод TTP, в особенности для ткани с высоким модулем сдвига и/или сдвиговой вязкостью. Это, главным образом, применимо, когда боковые точки близки к ROE, для получения наилучшего отношения сигнал/шум (SNR). В случае точек, близких к ROE, дисперсия оказывает большее влияние на TTP, чем на COM, что делает COM более желательным. Далее, авторы изобретения отметили, что на COM меньше влияет погрешность от наличия множественных пиков при низких SNR.
Как более подробно описано ниже, используют средневзвешенное значение времен замера для оценки времени, отвечающего COM для сигнала от боковой точки, где проходит замер в исследуемой ткани организма. Замер можно проводить во многих боковых местоположениях для одного и того же импульса. Цикл импульса можно повторять с различными временами замера для "регистрации" каждого сигнала.
Целесообразно селективно исключать факторы интервалов замера вероятных слагаемых или слагаемых, отвечающих взвешенному среднему, если сдвиг, наблюдаемый при данном времени замера, не превышает порог. Может также потребоваться, чтобы слагаемые/факторы, прошедшие первую стадию фильтрации, демонстрировали сегмент непрерывного смещения вокруг пика и выше порога в окрестности пика. Сегмент может отвечать кривой, аппроксимирующей серии значений последовательных сдвигов и может быть сочтен непрерывным, если, например, сумма абсолютных расстояний значений для кривой не превышает суммарного порога отклонения.
В ином случае или в дополнение, боковые точки также можно селективно исключать на основании достаточно низкого сдвига. Низкий сдвиг, в любом случае, приводит к возрастанию негативного влияния шума. Соответственно, из расчета времени прибытия удаляются данные с низким отношением сигнал/шум (SNR), что повышает точность.
В соответствии с настоящим изобретением устройство выполнено с возможностью применения вызванного поперечной волной сдвига, измеренного в точке вдоль траектории распространения, для расчета средневзвешенного среднего значения времени прибытия поперечной волны в указанную точку.
Устройство в одном из вариантов осуществления выполняют с возможностью оценки скорости распространения поперечной волны на основе времени, за которое поперечная волна попадает в другую точку вдоль указанной траектории.
В одной из разновидностей этого варианта скорость представляет собой величину групповой скорости поперечной волны.
В другом варианте взвешивание основано на сдвиге.
В конкретном варианте взвешивание основано на сдвиге.
В другом варианте взвешивание значений отвечает временам замеров при детектировании сдвигов.
В еще одном варианте сдвиги в зависимости от того, отвечают ли они порогу мгновенного сдвига, селективно исключают из расчета среднего.
В еще одном варианте устройство выполняют с возможностью применения значений сдвига в ряде точек, где порог меняется с положением точки, для которой рассчитывают соответствующее среднее.
В соответствующей разновидности варианта порог основан на сдвиге пика материала среды, где траектория проходит через среду.
В еще одной конкретной разновидности варианта порог прямо пропорционален сдвигу пика.
В еще одной разновидности варианта устройство выполнено с возможностью применения множества точек для расчета соответствующих средневзвешенных значений заданных времен прибытия. Порог равен сдвигу пика, умноженному на коэффициент, не зависящий от местоположения. Сдвиг пика зависит от местоположения.
В еще одной разновидности данного варианта коэффициент меняется в динамическом режиме в зависимости от критерия.
В еще одной разновидности данного варианта критерий основан на шумовой характеристике.
В еще одном дополнительном варианте устройство выполнено с возможностью использования в ряде точек и селективного исключения одной и более из этого ряда точек.
В конкретной разновидности данного варианта устройство далее выполнено с возможностью выбора в динамическом режиме на основании критерия.
В связанной разновидности данного варианта критерий основан на том, превышает ли соответствующий сдвиг пика порог сдвига пика.
В некоторых вариантах осуществления устройство включает ультразвуковой преобразователь, выполненный с возможностью измерений.
В некоторых вариантах осуществления устройство выполнено в виде одной или более интегральных цепей.
В другом варианте средневзвешенное значение равно времени прибытия в данную точку.
В другом варианте сдвиг представляет собой сдвиг ткани организма.
Настоящее изобретение реализуется в виде устройства, способа осуществления устройства, компьютерной программы для управления функциями устройства, сигнала для передачи функций и/или способа генерации сигнала. Способ генерации включает изменение электрического тока в применении, по меньшей мере, к одному из: a) входного провода указанного устройства; и b) антенны для передачи для генерации указанного сигнала посредством данного изменения.
Детали новой технологии получения времени прибытия поперечной волны описаны далее при помощи соответствующих чертежей.
Краткое описание чертежей
Фиг. 1 - это блок-схема примера ультразвукового зонда для измерений в среде;
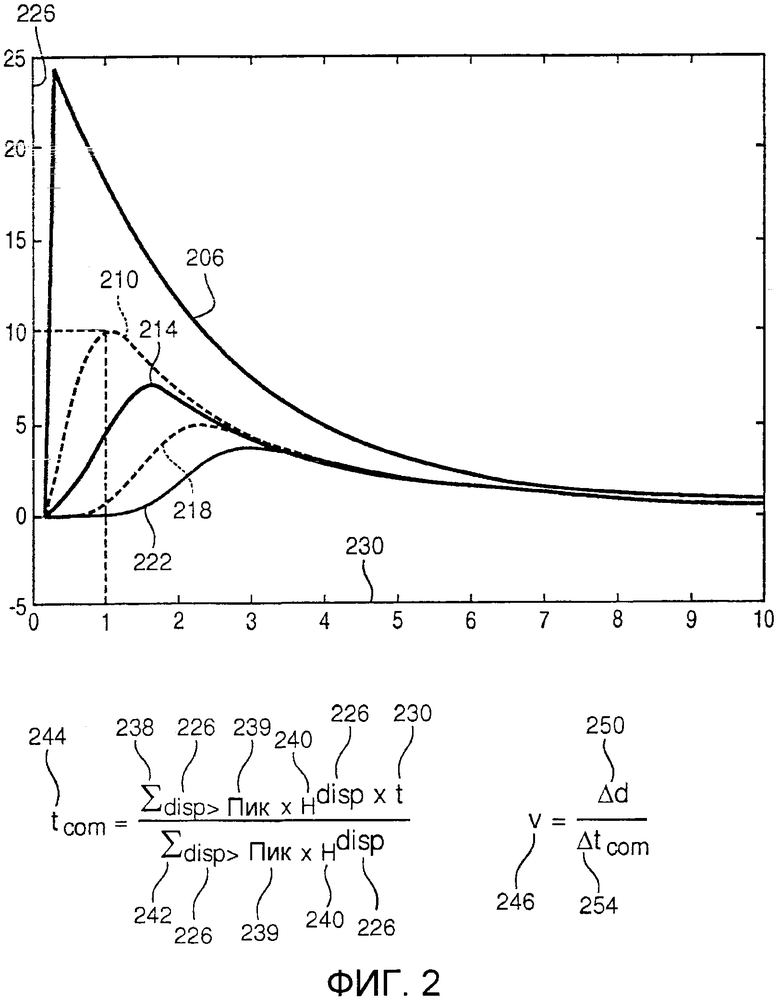
Фиг. 2 - это пример серии графиков сдвига от времени в зависимости от местоположения, где показаны формулы, применяемые для определения скорости поперечной волны;
Фиг. 3 - это рабочая диаграмма, показывающая работу системы;
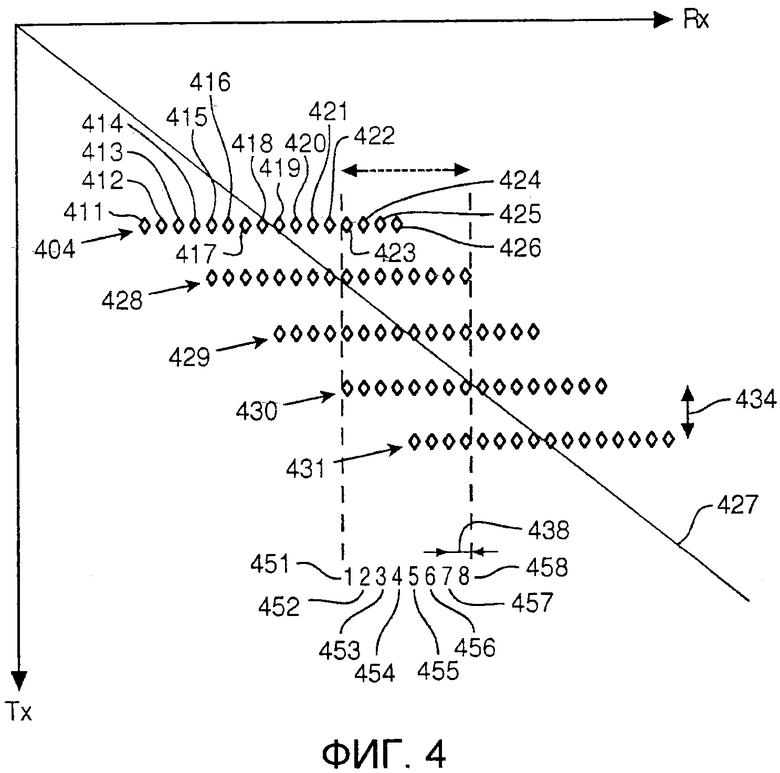
Фиг. 4 - это блок-схема передачи-отправки, где показан пример получения ретроспективной динамической передачи (RDT) в случае 16x многоканального устройства формирования луча; и
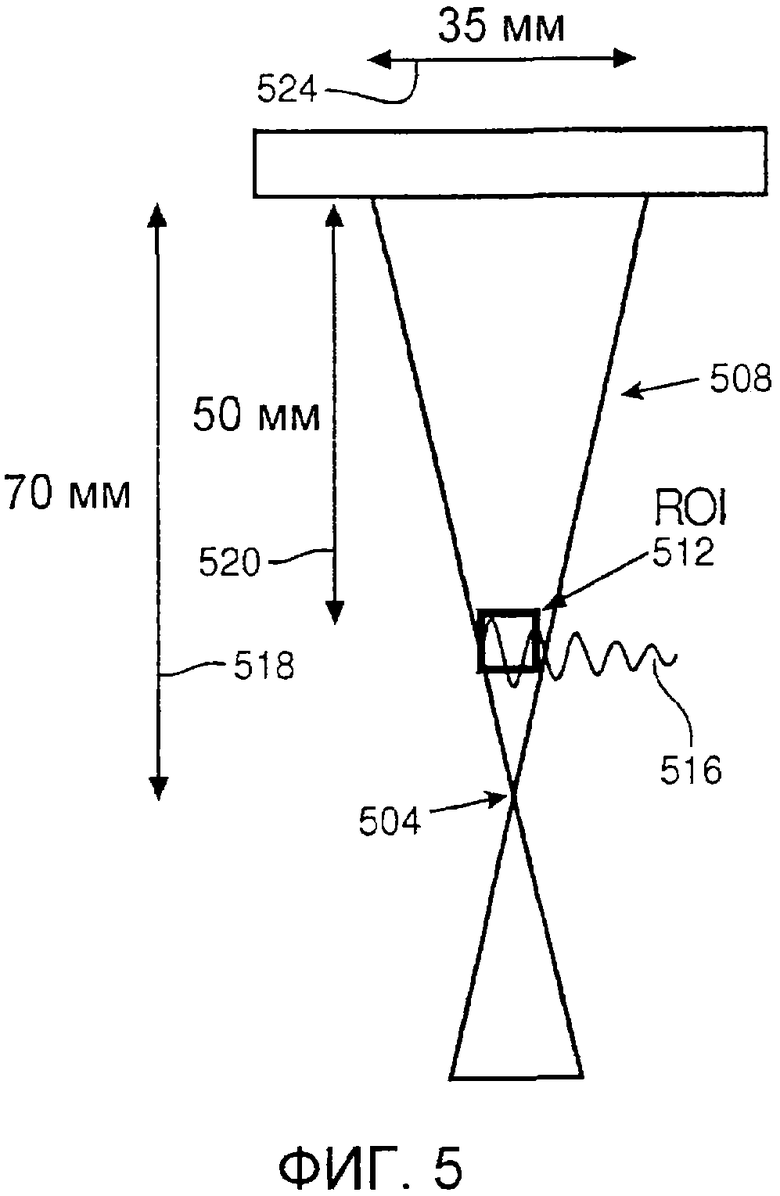
Фиг. 5 - это блок-схема, где показано для RDT возможное положение фокуса передачи детектирующего луча.
Подробное описание вариантов осуществления
Фиг. 1 - это пример ультразвукового зонда 100, включающего ультразвуковой преобразователь (не показан), испускающий исходный импульс 104 в среду 108, такую как ткань организма. В частности высокоинтенсивные, узкополосные сигналы испускаются с частотой, например, 100 Гц. Зонд 100 включает локальную схему взвешивания 110 на основе сдвига.
Каждый из результирующих направленных лучей 104 вызывает соответствующую поперечную волну 112. В ответ принимаются для обработки лучи слежения 116, 120, 124, 128, 132 выпускаются от ультразвукового зонда 100 и их соответствующие отражения (не показаны).
Лучи слежения 116-132 используют для измерения вызванного поперечной волной вертикального сдвига в ткани организма 108 в различных пространственных местоположениях 136, 140, 144, 148, 152 вдоль траектории 156 поперечной волны 112. Изначально выпускаются стандартные импульсы (не показаны) к каждой из точек для обеспечения стандартной решетки для последующего измерения сдвига.
Поперечная волна 112 проходит через мягкую ткань организма со скоростью, которая приблизительно в 1000 раз медленнее, чем скорость 1540 м/с, с которой распространяется ультразвуковая волна.
В ответ на лучи слежения 116-132 и ранее выпущенные стандартные импульсы к зонду 100 возвращаются соответствующие отражения. С использованием кросскорреляции или расчетов фазового сдвига определяют сдвиг в местоположениях 136-152.
Сдвиг, измеренный в точке 136-152, в соответствии с предлагаемым в настоящем документе, применяется схемой взвешивания 110 для определения того, прибыла ли поперечная волна 112 в заданную точку, как более подробно объяснено далее. Эти определенные времена можно применять для расчета механического параметра ткани, для которой проводили измерения сдвигов. Примеры таких механических параметров - это модуль упругого сдвига, модуль Юнга, динамическая сдвиговая вязкость, скорость поперечной волны и механический импеданс.
Например, на основании известных расстояний между местоположениями 136-152 и известных интервалов времени, применяемых при замерах, можно оценить функциональную зависимость между расстояниями между местоположениями распространения поперченной волны 112 и интервалом времени, в который происходит распространение от одной точки до другой. Можно использовать линейную регрессию для проведения измерений. Наклон регрессии указывает на величину групповой скорости поперечной волны 112. Ее величина отвечает скорости распространения поперечной волны, обычно применяемой для расчета модуля упругого сдвига ткани 108. Затем можно провести клинические измерения в отношении ткани 108.
Хотя на Фиг. 1 показаны пять местоположений, контролировать можно больше или меньше местоположений.
Зонд 100 или устройство, включающее зонд, можно выполнить как устройство по п. 1, например, для оценки состояния заболевания или злокачественности поражения.
Или же в пределах или в состоянии соединения с зондом 100 контрольная схема (не показана), служащая устройством по п. 1, может принимать форму интегральных схем (IC). Одна или более IC по п. 1 может, в другом случае, быть выполнена с возможностью установки в имеющиеся ультразвуковые устройства для улучшения указанной диагностической способности.
Поперечные волны описаны в настоящем документе выше как создаваемые при помощи ARF, что обеспечивает неинвазивность, однако в другом случае их можно генерировать путем подсоединения внешнего механического источника с изучаемой области. Получение изображения сдвига можно выполнить при помощи магнитно-резонансной томографии (МРТ) вместо ультразвука, но МРТ - это относительно дорогой способ и требует больше времени.
На Фиг. 2 показаны в качестве пояснительного и неограничивающего примера пять графиков сдвига в зависимости от времени или "кривых сдвига" 206, 210, 214, 218, 222. Они отвечают пяти местоположениям 136-152, соответственно. Местоположения 136-152 находятся вблизи фокуса направленного луча, т.е. в конце направленного луча 104. Они расположены вдоль пути распространения 156 на линии, перпендикулярной оси зонда 100, и они расположены на той же глубине, что и фокус исходного зонда. Сдвиг 226 приводят в микрометрах (мкм), а время 230 - в миллисекундах (мс). Расстояние между последовательными местоположениями 136-152 составляет 0,5 мм.
Взвешивающая схема 110, которая для иллюстрации изображена функционально связанной с четвертым лучом слежения 128, но которая аналогично связана со всеми лучами слежения 116-132, получает COM для каждого местоположения 136-152 путем определения средневзвешенного значения для соответствующей кривой 206-222. Взвешивание проводят по сдвигу. Взвешиваемые значения отвечают временам замеров для определения сдвига. Таким образом, для второго местоположения 140 и как показано на Фиг. 2 при помощи пунктирной линии, значение времени 230, равное 1 мс, взвешивают по сдвигу 226 в 10 мкм. Аналогично, все или некоторое подмножество значений 230 можно взвешивать индивидуально на основании сдвига 226 и складывать для получения суммы 238. В показанной формуле “disp” отвечает сдвигу 226.
Переменная "t" означает время 230, в которое измеряется сдвиг. "Пик" означает сдвиг пика 239, а "H" означает фактор порога мгновенного сдвига 240, как обсуждается далее. Сумму 238 делят на сумму 242 сдвигов 226, используемых при взвешивании, в результате чего формируется взвешенное среднее 244, отвечающее символу tCOM. Параметр tCOM для заданного местоположения 136-152, - это положение COM во времени, равное расчетному взвешенному среднему для 244. Параметр tCOM отвечает времени прибытия поперечной волны 112 в точку 136-152, причем у каждой точки свое значение tCOM.
Скорость распространения 246 можно получить при помощи вышеописанного способа регрессии на основе известных расстояний 250 между местоположениями 136-152 и интервала времени 254 между соответствующими временами прибытия поперечной волны 244, т.е. соответствующих параметров tCOM. Это показано на Фиг. 2, где Ad означает расстояние между двумя местоположениями 136-152, а ΔtCOM отвечает разности между двумя соответствующими средними 244, отвечающими символу tCOM.
Хотя кривые сдвига 206-222 показаны строго положительными, кривая в любой заданной точке 136-152 также может быть строго отрицательной, как обсуждается далее. Местоположения 136-152, для которых кривая сдвига 206-222 является гребнем, сравнимы между собой для целей расчета скорости распространения 246; аналогично, положения, для которых кривая сдвига является впадиной, сравнимы для тех же целей.
Целесообразно удалять шум из данных по сдвигам, что делает средневзвешенные значения 244 более стабильными.
Имеется ряд потенциальных источников шума. Некоторые местоположения 136-152 могут быть шумными. Первые два местоположения 136, 140, например, могут быть расположены в импульсном луче 104, так что предположение о чистом распространении поперечной волны более неверно для этих двух точек. Это зависит от многих факторов, таких как частота преобразователя, f-число, глубина фокуса и расстояние слежения.
Также для проникновения в более глубокую изучаемую область (ROI) требуется более низкая частота ультразвука. При последующих больших длинах волн снижается качество анатомических деталей, что приводит к уменьшению отношения сигнал/шум (SNR).
Дыхание пациента и его сердечные сокращения вызывают движения, которые могут снижать SNR. Если получают изображение опухоли, например, она может быть ближе или дальше от сердца или крупной артерии, что приводит к более или менее высокому уровню шума. Замеры могут быть проведены с учетом временных ворот во избежание этих помех, связанных с движением.
Шум может меняться с качеством или типом ультразвукового оборудования. Например, сканер меньшего размера или с меньшими размерами элементов преобразователя может производить больше шума.
Шум оказывает большее отрицательное влияние на данные с низкими сдвигами, применяемые при расчете времени прибытия 244.
Выбирают местоположения 136-152, которые следует использовать при расчете времени прибытия 244. Например, первую точку 136 можно селективно исключить, как показано выше, из-за того, что она недостоверно соответствует чистому распространению поперечной волны. Исключение, если таковое проводится, по местоположениям может быть задано заранее, когда, например, исключается первое местоположение 136. Исключение может быть, в другом случае или в дополнение, динамически определено на основании некоторых критериев, таких как критерии пика, например, требование того, чтобы максимальный сдвиг был больше, чем заранее указанный порог пика сдвига.
Кроме того, порог мгновенного сдвига меняется для кривой сдвига 206-222 как порог, после которого данные становятся достоверными. Пороговое значение может быть основано на сдвиге пика 239. Например, оно может быть принято равным сдвигу пика, умноженному на фактор порога мгновенного сдвига 240, который не зависит от положения. Фактор 240 может быть предустановлен, например, при 50%. Или же он может быть динамически выбран на основе некоторых критериев. Эти критерии могут включать шумовую характеристику, такую как SNR.
Как показано на Фиг. 3, исключение местоположения может быть предустановленно оператором, указавшим, какие местоположения следует обработать или исключить (стадия S310). Аналогично, оператор может, если он изменяем, ввести порог сдвига пика и может сделать то же для фактора порога мгновенного сдвига 240 (стадия S320). После выполнения измерений и в зависимости от данных предыдущих стадий S310, S320 проводят динамическое исключение точек в соответствии с заданными критериями (стадия S330). Кроме того, отфильтровывается сдвиг 226, не соответствующий порогу мгновенного сдвига, т.е. не используемый в расчете времени прибытия 244 (стадия S340).
Возможно множество разных схем замеров.
При частоте направленного луча 100 Гц, типичной для измерения скорости поперечных волн при помощи ARF, одна длина волны проходит данное местоположение 136-152 за 10 мс. При частоте слежения, т.е. при частоте повторения импульса слежения (PRF), равной 10 кГц, можно провести 100 замеров, для данного времени на импульс 104. Таким образом, за 10 мс можно провести несколько меньше, чем 100 замеров, т.е. 95 замеров.
Аналогично в местоположениях 136-152 можно последовательно провести замеры.
Таким образом, первый замер выполняют в первом местоположении 136, второй замер - во втором местоположении 140 и т.д. Один проход, состоящий из пяти замеров, один замер на каждое местоположение 136-152, можно повторять 19 раз, например, для одного предшествующего импульса 104. Так, каждое взвешенное среднее 244 может быть основано на 19 взвешенных значениях.
Если импульсы 104 однородные можно добавить 19 значений на местоположение 136-152 с промежуточными по времени замерами путем определения сдвига 226 для ряда импульсов. Для каждого последующего импульса меняется порядок замеров. Например, после второго импульса 104 первый замер может быть во втором местоположении, второй замер - в третьем местоположении и т.д., причем пятый замер будет в первом местоположении. После третьего импульса замеры сдвигаются по положению на одно местоположение и т.д. Ко времени измерения реакции поперечной волны на пять последовательных импульсов 104 в каждой из точек 136-152 проведены замеры в 95 равноотстоящих временных местоположениях, определяющих продолжительность измеряемых гребня, впадины или их части. При измерении соответствующих поперечных волн 112 в случае многочисленных импульсов 104 взвешенные значения расчета одного времени прибытия 244 основаны на замере различных по времени поперечных волн. В то же время их можно рассматривать, в целях расчета, как одну поперечную волну 112 благодаря однородности импульсов 104. Таким образом, оценка скорости распространения поперечных волн основана на времени, которая поперечная волна 112 присутствует в различных местоположениях 136-152, на основании данных, полученных для поперечных волн, испускаемых при различных импульсах 104, применяемых в одном и том же расчете.
В качестве альтернативы дополнения по времени порядок замеров точек 136-152 можно сохранять постоянным, с началом замеров после каждого однородного импульса 104 с задержкой, а затем все время, с заданным интервалом времени между замерами. Таким образом, после первого импульса 104 замеры в местоположениях 136-152 проводят в заданном порядке, за 19 проходов. После второго направленного луча 104 сохраняют тот же порядок замеров, но начало замеров после импульса задерживают. Задержка, т.е. интервал времени между замерами, равна времени между последовательными замерами. Таким образом, например, замер в первом местоположении 136 проводят в момент после импульса, который немного больше после второго импульса 104, чем после первого импульса. После третьего импульса замер в первом местоположении еще больше задерживают и т.д., до последнего, т.е. пятого импульса. Опять, как и в предыдущем варианте всего при пяти импульсах 104 замер в каждой из точек 136-152 проводят через равные промежутки времени, позволяющие описать продолжительность измеряемых гребня или впадины, или их части. В настоящем варианте, в проходе сразу после импульса 104, полный замер проводят только в первом местоположении 136; однако, как видно из Фиг. 2, отсутствующие данные, скорее всего, в любом случае будут отфильтрованы за несоответствие порогу мгновенного сдвига. Отсутствующие данные также можно интерполировать, а затем подвергнуть фильтрованию.
В качестве еще одного варианта многоканальная принимающая схема, как указано в патенте Пальмери, собирает больше информации на каждый отслеживающий импульс. Для каждого отслеживающего или "передающего" импульса (или "передачи") формируют многочисленные принимающие линии. Пальмери использует 4 параллельно направленных принимающих линии, хотя можно использовать большее их число, такое как 16 или 32. Принимающие линии формируются в динамическом режиме и пространственно параллельны.
Для достижения дальнейшего повышения SNR замер по многоканальным принимающим линиям можно осуществлять при помощи ретроспективной динамической передачи (RDT). RDT описывают в контексте замеры поперечных волн в переуступленной заявке на патент, основанной на раскрытии сущности изобретения Philips 776394, озаглавленного "Замер с малым пространственным интервалом поперечных волн при помощи волновой дисперсионной ультразвуковой виброметрии", авторы Бурхер и сотр. (далее: "Бурхер").
В патентной заявке Бурхера описано, как цикл из четырех пространственно смещенных передающих и принимающих апертур может быть использован для замера поперечной волны в четырех пространственных местоположениях. Как указано у Бурхера, при увеличении числа передач в цикле до пяти можно провести плотные замеры в восьми пространственных местоположениях, например, при расстоянии всего лишь в 0,125 мм. Меньшие расстояния между местоположениями позволяют замеры ближе к импульсу 104. Это способствует устранению деградации измерений пакета поперечных волн с амплитудой, которая падает во времени перпендикулярно оси распространения.
На Фиг. 4 изображена примерная схема RDT выполненная на основании 16x многоканального устройства формирования луча, т.е. устройства формирования луча, которое формирует 16 принимающих линий из одного передающего луча (или, кратко, "передачи").
В случае многоканального устройства формирования луча замер проводят по группе пространственных точек. Для каждой группы выпускается передающий луч. Если ROI расположена на различной глубине, нежели фокус передающего луча, тогда передающий луч шире, чем в фокусе и ультразвук будет попадать на группу пространственных точек. В другом случае луч плохо сфокусирован на той же глубине, что и ROI, с шириной, достаточной для попадания ультразвука на группу пространственных точек.
Для отражения передающего луча от одного импульса слежения 404, 16x формирующая луч схема образует 16 параллельно направленных принимающих линий 411-426 для измерений поперечной волны 112. Как указано диагональю, субапертурой линии слежения 427, первые восемь принимающих линий 411-418 находятся с одной стороны центра передачи, а вторые восемь принимающих линий 419-426 - с другой стороны.
Последующие импульсы слежения 428, 429, 430, 431 и первый импульс слежения 404 все не совпадают по времени. Если PRF передающей A-линии (или "импульса слежения") установлена равной 10 кГц, например, первый импульс слежения 404 выпускается за 100 мкс до следующего импульса слежения 428. Через 100 мкс выпускается следующий импульс 429 и т.д.
Каждый из импульсов 404, 428, 429, 430, 431 сформирован соответствующими активными в тот момент субапертурами зонда отслеживания. Активная субапертура представляет собой подгруппу элементов преобразователя, которые в настоящий момент активны в отношении передаваемого ультразвука. Так, например, после выпускания импульса слежения 404 активная в текущий момент субапертура смещается (например, один или более элементов с одной стороны апертуры исключают, а один или более элементов с другой стороны добавляются). Затем, при выпускании следующего импульса слежения 428, имеет место сдвиг субапертуры. Пространственное расстояние между соседними апертурами далее упоминается как расстояние передачи 434, которое, в данном примере, равно 0,5 мм. Местоположение фокуса импульса слежения также сдвигается на расстояние передачи 434 между последовательными импульсами слежения.
16 параллельно направленных линий 411-426 (т.е. динамически сформированных, пространственно параллельных принимающих линий) формируются из данных отражения, полученных после передачи 404. Каждая из принимающих линий 411-426 формируется принимающей субапертурой. Принимающая субапертура является подгруппой элементов преобразователя, дающих вклад в заданную принимающую линию.
Пространственное расстояние между принимающими линиями 411-426 далее указывается как принимающее расстояние 438. В этом примере оно равно 0,125 мм или четверти от 0,5 мм - расстояния передачи 434.
В случае, когда принимающее расстояние 438 составляет долю от расстояния передачи 434, возможны более частые замеры, как будет подробно обсуждено ниже.
Все полученные отраженные данные на радиочастотах сохраняют во временном хранилище. Сохранение полученных данных будет продолжаться по мере сдвига субапертуры и постепенно займет свое конечное положение в решетке преобразователей, т.е. так, что потребуется полный проход всех данных. В дополнение к этому, данные будут сохраняться от прохода к проходу.
Вследствие сдвига в субапертуре между выпусканием первого импульса слежения 404 и следующего импульса слежения 428 последние двенадцать принимающих линий 415-426 этого первого импульса перекрываются в пространстве, соответственно, с первыми двенадцатью принимающими линиями этого следующего импульса. Аналогично, вследствие сдвига субапертуры с каждым следующим импульсом слежения последние двенадцать принимающих линий импульса слежения 428 перекрываются с первыми двенадцатью принимающими линиями следующего импульса слежения 429 и т.д.
К моменту выпускания пятого импульса слежения 431 соответствующие принимающие линии всех пяти импульсов слежения 404, 428, 429, 430, 431 перекрываются и могут сочетаться для формирования восьми реконструированных A-линий, отвечающих восьми местоположениям 451-458.
Первая реконструированная A-линия для местоположения 451, например, формируется из первой принимающей линии 423 в сочетании с тремя соответствующими принимающими линиями ближайших следующих импульсов слежения 428-430, где все четыре принимающих линии попадают в данное местоположение. Комбинирование происходит в соответствии с ретроспективной динамической передачей (RDT). Эффект фокусировки RDT можно проанализировать при помощи приближения виртуального преобразователя, предложенного Пассманном и Эрмертом в 1996 г. См. C. Passmann & H. Ermert, "A 100-MHz ultrasound imaging system for dermatologic and ophthalmologic diagnostics," IEEE Trans. Ultrasonics, Ferroelectrics and Frequency Control, vol. 43, no. 4, pp. 545-52 (1996). Этот метод далее обсуждается в принадлежащей одному и тому же правообладателю, Бурхером и сотр., патентной заявке США № 2009/0069693, озаглавленной "Фокусировка ретроспективной динамической передачи для пространственной комбинации преобразований" (далее: "публикация 693"). Обе публикации настоящим полностью включены в этот документ в виде ссылки.
Первая реконструированная A-линия для местоположения 451 предназначена для измерения поперечной волны 112 в пространственном местоположении 451. Аналогично, следующие же реконструированные A-линии для точек 452-458 с боковым сдвигом для первой реконструированной A-линии для местоположения 451 предназначены для измерения поперечной волны 112 в соответствующих местоположениях 452-458.
Хотя здесь четыре приемных линии сочетаются при помощи реконструированной A-линии, можно комбинировать меньшее число приемных линий. Число фактически комбинируемых линий зависит от глубины ROI и последующего покрытия ультразвуковым импульсом слежения. Также данный пример не является ограничивающим. Таким образом, сдвиг апертуры может быть основан на том, что больше или меньше принимающих линий скомбинированы для формирования реконструирования A-линии.
Благодаря комбинированию возрастают глубина поля (DOF), область, где передача хорошо сфокусирована, и отношение сигнал/шум (SNR). При сравнении реконструированной A-линии для местоположения 451 с любой из принимающих A-линий, при помощи которой ее реконструировали, длина, вдоль которой целесообразно ее пространственное разрешение, увеличивается благодаря большим DOF в результате RDT.
Реконструкция A-линии на основе четырех приемных линий начинается с первых четырех реконструированных A-линий для точек 451-454 и продолжается для каждого нового импульса слежения. Таким образом, новый импульс слежения позволяет формировать четыре реконструированные A-линии для точек 455-458. Аналогично, для остальной структуры каждый следующий импульс слежения приводит к формированию соответствующего ряда реконструированных A-линий; например, в текущем примере, такой ряд состоит из четырех реконструированных A-линий в случае, когда замеры проводят в большем количестве точек.
На схеме, показанной на Фиг. 4, где замеры проводят в 8 местоположениях 451-458, можно выполнить 19 проходов после импульса 104. В дополнение к этому, набор данных может включать несколько, например, 5, импульсов. Можно отбирать местоположения, как описано выше, с началом замеров после каждого отложенного импульса 104 для улучшения расчетов средневзвешенного значения.
Таким образом, формируется подробная выборка для поперечной волны 112 без снижения скорости выпускания импульсов снижения.
При комбинировании передач RDT для интерполяции промежуточных точек передачи (как показано в публикации '693) интерполируют время замера (а также местоположение замера) между передачами. Иными словами, в случае времен выпускания импульса и в случае точек передачи после выпускания (например, вдоль линии слежения 427 в рамках окна для передач, применяемых при реконструкции) их интерполируют при помощи такой же взвешенной интерполяции, как и применяемая в реконструкции A-линии RDT публикации '693.
На Фиг. 5 показано для RDT возможное расположение фокуса 504 детектирующего луча 508, сформированного импульсом слежения 404. Изучаемая область (ROI) 512, как показано квадратной рамкой, находится там, где имеется поперечная волна 516. Для обеспечения того, что облучение ультразвуковыми волнами детектирующего луча 508 охватывает местоположения, в которых проводят замер, по получаемым линиям, целесообразно поместить фокус 504 глубоко в ROI 512. Физическое положение фокуса, показанное на Фиг. 5, находится на глубине 70 мм, общей глубине 518 для передач ультразвука в данном местоположении в ROI и, таким образом, для сочетания с RDT. Хотя детектирующий луч 508 широкий на глубине 520 ROI 512, RDT-реконструированный детектирующий луч на этой глубине узкий; он имеет ту же ширину, что и в области (физического) фокуса 504. В действительности, например, из временно-направленного луча слежения 404 и, по меньшей мере, одного импульса слежения 428-431 с боковым сдвигом, формирующего передачу для сочетания в RDT с передачей временно-направленного луча слежения, по меньшей мере, некоторые сфокусированы на общей глубине 518. Менее глубокий фокус передачи, на глубине 520, реконструируют на основе отраженных данных от тех из импульсов 404, 428-431, которые сфокусированы на общей глубине 518.
Это также позволяет использовать большую апертуру передачи 524, что может повышать общую мощность, передаваемую с детектирующим лучом 508. Большая мощность обеспечивает большую чувствительность в случае сдвигов амплитуды 132 малых волн, порядка 5-20 пм.
В другом случае фокус 504 детектирующего луча 508 может находиться недалеко от ROI 512.
В RDT имеются указанные преимущества, несмотря на предположение о том, что ткань не сдвигается между событиями передачи. Если имеет место сдвиг, то он снижает связь между объединенными передачами и приводит к погашению сигнала. Таким образом, это мало совместимо с настоящим методом, поскольку ткань смещается поперечной волной. Однако на практике сдвиги 226 столь малы (как правило, менее 20 мкм), что это малая доля длины волны импульса слежения (например, 300 мкм при 5 МГц). Таким образом, сдвиг поперечной волны 226 не вызывает значительной потери связи во время реконструкции передачи.
Подводя итог, желательно провести замеры во многих местоположениях для повышения числа измерений и обеспечения устойчивости. Число точек ограничено максимальным PRF, как только что было отмечено выше.
Также целесообразно расположить боковые местоположения близко к точке возбуждения, т.е. фокусу импульса, во избежание ослабления амплитуды поперечной волны, которая затрудняет измерение амплитуды, хотя первое латеральное местоположение ограничено его близостью к точке возбуждения вследствие эффектов в ближнем поле. Достаточность SNR может служить указанием на то, насколько далеко от местоположения возбуждения следует располагать боковые местоположения во избежание помех в ближнем поле. Также желательно, чтобы соседние местоположения были расположены близко во избежание ослабления, но этот эффект ограничен другими инженерными соображениями.
Благодаря извлечению большего количества информации из каждого испускаемого импульса слежения предлагаемые здесь методология и инструментарий позволяют провести более полный замер поля сдвига поперечной волны. Таким образом, это позволяет провести более стабильную оценку скорости поперечной волны и эластичных свойств среды.
Средневзвешенное положение во времени рассчитано на основании замера сдвига поперечных волн вдоль пути распространения. Взвешивание осуществляют, например, по сдвигу, наблюдаемому в моменты времени, отвечающие замеру; оно соответствует времени прибытия поперечной волны в отвечающее замеру местоположение траектории распространения поперечной волны. В некоторых вариантах осуществления рассчитанные времена прибытия поперечных волн в соответствующие местоположения функционально связаны с известными расстояниями между местоположениями, что позволяет рассчитать групповую скорость поперечных волн. Полученную скорость можно использовать в качестве входных данных в известных алгоритмах оценки упругость при сдвиге среды, такой как ткани организма, для целей клинического диагноза и терапевтической оценки.
Хотя представленную здесь методологию целесообразно использовать для медицинской диагностики людей или животных, предполагаемые рамки охвата заявки не так ограничены. В более широком варианте предполагается измерение механических свойств эластичной среды in vivo, in vitro или ex vivo.
В то время как изобретение подробно проиллюстрировано и описано на чертежах и в предшествующем тексте, такие иллюстрации и описания считаются пояснительными или типовыми и неограничивающими; изобретение не ограничивается приведенными вариантами осуществления.
Например, все данные, например, 95, можно измерить для единственного, заданного местоположения после испускания импульса, а затем, после следующего импульса, - для следующего местоположения и т.д. Здесь время замера от импульса до начала замеров будет одинаковым для всех точек. При однородных импульсах время замера в различных местоположениях соответствует одной и той же, установившейся форме сигнала.
Другие опубликованные варианты осуществления могут представить себе и осуществить эксперты в области предлагаемого изобретения, на основании исследования чертежей, публикации и прилагаемой формулы изобретения. В формуле изобретения слово "включает" не исключает другие элементы или стадии, а единственное число не исключает осуществления с множественным числом. Любые ссылки в формуле изобретения не следует рассматривать как ограничивающие область изобретения.
Компьютерную программу можно сохранять мгновенно, временно или на больший период времени на подходящем компьютерно-читаемом носителе, таком как оптическое запоминающее устройство или твердотельная память. Такая среда не является непереходящей только в смысле того, что она не является переходящим, распространяющимся сигналом, но включает другие формы компьютерно-читаемой памяти, такой как регистр ЗУ, кэш процессора и ОЗУ.
Сигнал, отвечающий описанному в изобретении устройству 100 и предназначенный для передачи на устройство, формируется путем соответствующего изменения электрического тока. Сигнал может поступать на устройство по входному проводу или может передаваться по беспроводной связи при помощи антенны.
Функции нескольких элементов, указанных в формуле изобретения, может выполнять один процессор или другое устройство. Сам тот факт, что некоторые особенности приведены в различных зависимых заявках, не говорит о том, что сочетание этих пунктов нельзя успешно использовать.

Использование: для оценки скорости поперечной волны. Сущность изобретения заключается в том, что средневзвешенное положение во времени рассчитано на основании замеров сдвига поперечных волн вдоль пути распространения. Взвешивание осуществляют, например, по сдвигу, наблюдаемому в моменты времени (230), отвечающие замерам, и оно соответствует времени прибытия поперечной волны в отвечающую замерам точку траектории распространения поперечной волны. В некоторых вариантах осуществления рассчитанные времена прибытия поперечных волн в соответствующие точки функционально связаны с известными расстояниями между местоположениями, что позволяет рассчитать групповую скорость поперечных волн. Полученную скорость можно использовать в качестве входных данных в известных алгоритмах оценки упругости при сдвиге среды, такой как ткани организма, для целей клинического диагноза и терапевтической оценки. Технический результат: повышение точности определения скорости поперечной волны. 3 н. и 12 з.п. ф-лы, 5 ил.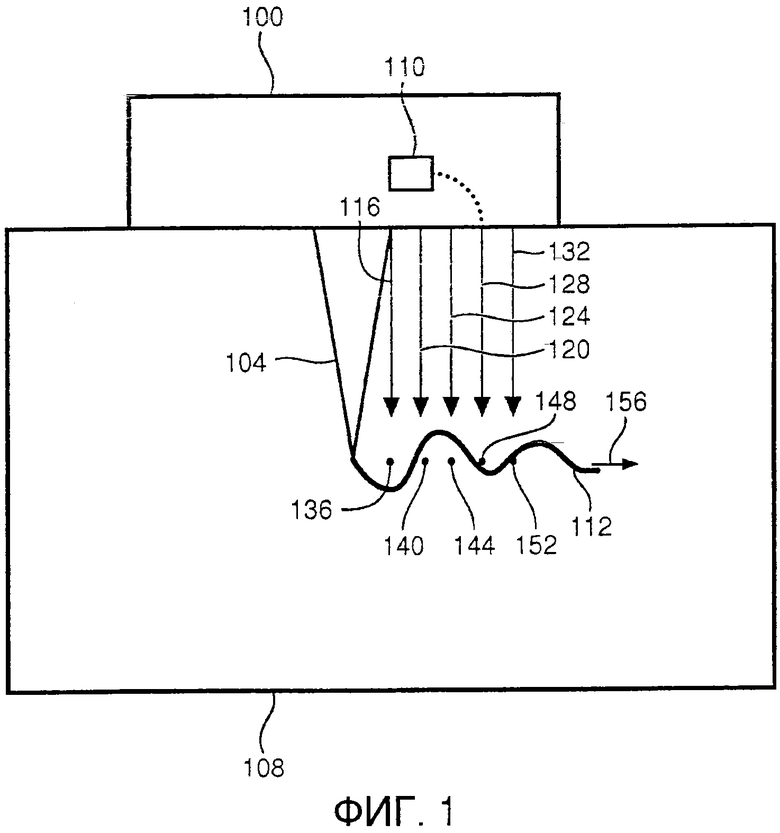
1. Устройство (100) детектирования прибытия поперечной волны, содержащее:
ультразвуковой преобразователь, выполненный с возможностью (i) запуска направленных лучей (104) в среду (108), причем каждый направленный луч содержит фокус направленного луча, и выполнен с возможностью создания соответствующей поперечной волны (112) вдоль траектории распространения (156) сквозь среду;
причем ультразвуковой преобразователь дополнительно выполнен с возможностью (ii) испускания лучей слежения (116, 120, 124, 128, 132), получения соответствующих отраженных сигналов и измерения, в ответ на испущенные лучи слежения и соответствующие полученные отраженные сигналы, вызванного поперечной волной сдвига в среде в различных местоположениях пространства вдоль траектории распространения соответствующей поперечной волны; и
имеющуюся схему взвешивания (110) на основе сдвига, функционально связанную со всеми лучами слежения, причем имеющаяся схема взвешивания на основе сдвига выполнена с возможностью (i) использования вызванного поперечной волной сдвига, измеренного в различных местоположениях пространства вдоль траектории распространения (156) для определения значения времени центра масс (СОМ) для каждого из различных местоположений пространства, причем значения времени взвешиваются на основании сдвига значения времени соответствующей кривой сдвига, которая соответствует временам, ассоциированным с образцом, который определяет сдвиг, и (ii) расчета, в ответ на первую сумму (238), деленную на вторую сумму (242), сдвигов, использованных при взвешивании, предоставления средневзвешенного времени прибытия соответствующей поперечной волны в соответствующее место из различных местоположений пространства, причем каждое местоположение из различных местоположений в пространстве имеет свое соответствующее средневзвешенное значение.
2. Устройство по п. 1, причем ультразвуковой преобразователь дополнительно выполнен с возможностью оценки скорости распространения поперечной волны (246) на основе времени, за которое поперечная волна попадает в другое местоположение вдоль указанной траектории.
3. Устройство по п. 2, причем указанная скорость распространения поперечной волны содержит величину групповой скорости указанной поперечной волны (112).
4. Устройство по п. 1, причем указанная имеющаяся схема взвешивания на основе сдвига дополнительно выполнена с возможностью селективного исключения из расчета данного средневзвешенного значения конкретного сдвига на основании того, соответствует ли упомянутый конкретный сдвиг порогу мгновенного сдвига (239, 240).
5. Устройство по п. 4, причем порог мгновенного сдвига меняется в зависимости от пространственного расположения, для которого рассчитывается соответствующее средневзвешенное значение (206-222, 239, 240).
6. Устройство по п. 4, причем среда содержит материал, и дополнительно при этом порог мгновенного сдвига основан на сдвиге пика (239) для материала среды (108).
7. Устройство по п. 6, причем дополнительно порог мгновенного сдвига прямо пропорционален указанному сдвигу пика.
8. Устройство по п. 7, в котором, дополнительно, имеющаяся схема взвешивания на основе сдвига использует множество различных местоположений в пространстве для расчета соответствующих средневзвешенных значений, отвечающих соответствующим временам прибытия (244), и причем порог мгновенного сдвига дополнительно равен указанному сдвигу пика, умноженному на коэффициент, инвариантный к местоположению, причем указанный сдвиг пика изменяется в пространстве.
9. Устройство по п. 8, в котором указанный фактор меняется в динамическом режиме на основе критерия (S320, S330).
10. Устройство по п. 1, в котором различные местоположения в пространстве содержат множество различных местоположений в пространстве, и причем указанная имеющаяся схема взвешивания на основе сдвига дополнительно выполнена с возможностью селективного исключения одного или более из множества местоположений (S310) из расчета данного средневзвешенного значения.
11. Устройство по п. 10, причем селективное исключение одного или более из множества местоположений динамически основано на критерии (S310, S330).
12. Устройство по п. 11, причем указанный критерий заключается в том, превышает ли соответствующий сдвиг пика (239) порог сдвига пика.
13. Устройство по п. 1, в котором указанный вызванный поперечной волной сдвиг содержит сдвиг ткани организма (108).
14. Способ детектирования прибытия поперечной волны, который содержит этапы:
осуществления при помощи ультразвукового преобразователя (i) запуска направленных лучей (104) в среду (108), причем каждый направленный луч содержит фокус направленного луча и выполнен с возможностью создания соответствующей поперечной волны (112) вдоль траектории распространения (156) сквозь среду; и (ii) испускания лучей слежения (116, 120, 124, 128, 132), получения соответствующих отраженных сигналов и измерения, в ответ на выпущенные лучи слежения и соответствующие полученные отраженные сигналы, вызванного поперечной волной сдвига в среде в различных местоположениях пространства вдоль траектории распространения соответствующей поперечной волны; и
осуществления при помощи имеющейся схемы взвешивания на основе сдвига (110) (i) использования вызванного поперечной волной сдвига, измеренного в различных местоположениях пространства (136-152) вдоль траектории распространения для определения значения времени центра масс (СОМ) для каждого из различных местоположений пространства, причем значения времени взвешиваются на основании сдвига значения времени соответствующей кривой сдвига, которая соответствует временам, ассоциированным с образцом, который определяет сдвиг; и (ii) расчета, в ответ на первую сумму (238), деленную на вторую сумму (242), сдвигов, использованных при взвешивании, предоставления средневзвешенного времени прибытия соответствующей поперечной волны в соответствующее местоположение из различных местоположений пространства, причем каждая точка из различных местоположений в пространстве имеет свое соответствующее средневзвешенное значение.
15. Компьютерно-читаемый носитель, реализующий компьютерную программу, которая включает в себя выполняемые процессором инструкции для выполнения множества действий в соответствии со способом по п. 14.
| US 2008249408A1, 09.10.2008 | |||
| JP 2010012305A, 21.01.2010 | |||
| WO 2004093686A1, 04.11.2004 | |||
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |
| Способ ультразвукового контроля изделий | 1985 |
|
SU1293630A1 |

