Изобретение относится к устройству для ручного деблокирования находящегося под нагрузкой стопорного механизма, включающего орган управления, который для деблокирования стопорного механизма вручную активируют приводным усилием, которое возрастает с увеличением нагрузки, преобразующий механизм, который имеет соединенный с органом управления элемент передачи усилия, и соединенный с элементом передачи усилия расцепляющий механизм, которое для деблокирования стопорного механизма приводным усилием, которое элемент передачи усилия передает на расцепляющий механизм, из положения блокировки, в котором расцепляющий механизм функционально отсоединен от стопорного устройства, перемещается в положение деблокирования, в котором расцепляющий механизм функционально соединен со стопорным механизмом для его деблокирования.
В медицинской технике в последнее время используется система поддержки, например, для опорного позиционирования руки при проведении операций на плече или предплечье пациента. Эта система поддержки образована по существу из фиксатора, который чисто схематично изображен на фиг. 1.
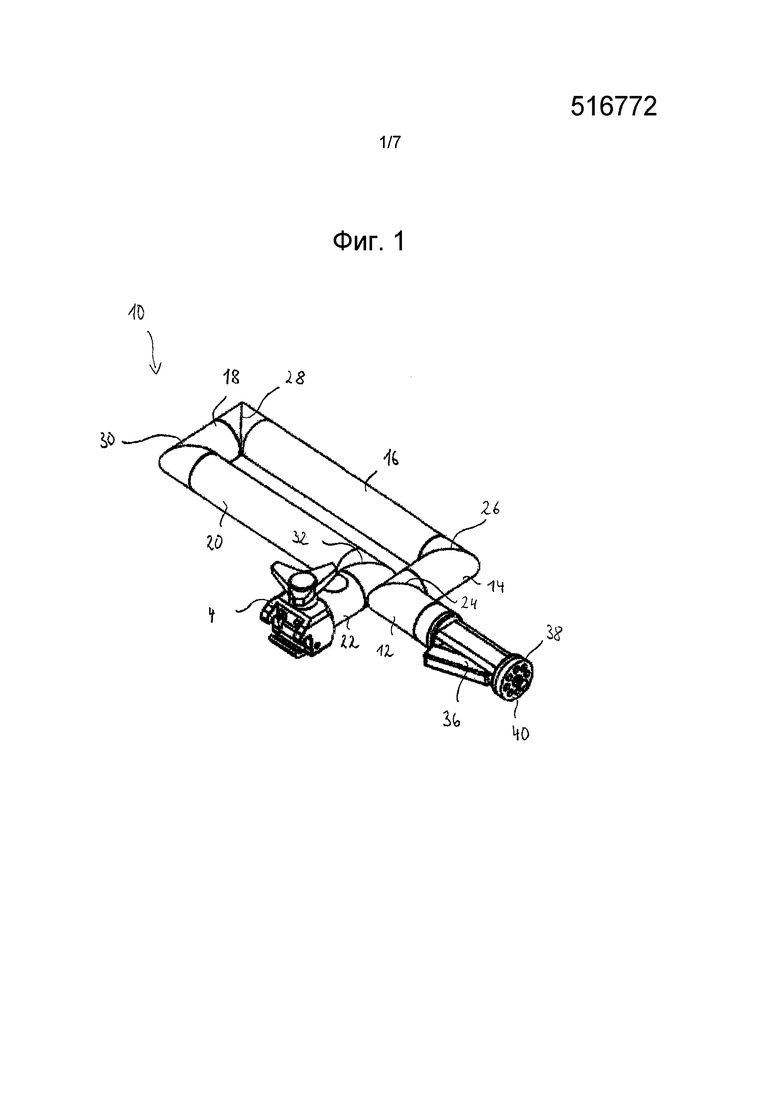
Обозначенный на фиг. 1 позицией 10 фиксатор содержит жесткие элементы фиксации 12, 14, 16, 18, 20 и 22, которые шарнирами 24, 26, 28, 30 и 32 соединены между собой. На одном конце фиксатора 10 расположено крепежное устройство 34, которое служит для того, чтобы закрепить фиксатор 10 на направляющей скольжения операционного стола. На другом конце фиксатора 10 находится ручка 36, которая может быть активирована вручную оператором, чтобы деблокировать фиксатор описанным в дальнейшем способом. На ручке 36 расположено зажимное устройство 40 с несколькими блокировочными отверстиями 38, на которое может быть помещена непоказанная подставка, например, для опорного позиционирования руки пациента.
Как упомянуто выше, ручка 36 служит для деблокирования фиксатора 10, в частности, шарниров 24-32, соединяющих друг с другом отдельные элементы фиксации 12-22. С этой целью фиксатор 36 содержит не показанный на фиг. 1 расцепляющий механизм, который при сжатии ручки 36 активирует направляемый фиксатором 10, не показанный на фиг. 1 деблокирующий стержень. При этом приложенное к ручке 36 приводное усилие посредством преобразующего механизма, который находится внутри ручки 36, передается на расцепляющий механизм. Если при сдавливании ручки 36 расцепляющий механизм воздействует на деблокирующий стержень, то последний, в свою очередь, обеспечивает деблокирование отдельных шарниров 24-32. Каждый шарнир 24-32 выполнен таким образом, что в деблокированном состоянии обеспечивает относительное движение двух элементов фиксации, которые соединены между собой посредством этого шарнира.
Если же приводное усилие не прилагают на ручку 36, это означает, что элементы фиксации 12-22 фиксатора 10 жестко соединены между собой посредством шарниров 24-32. В этом состоянии фиксатор образует жесткий блок, который способен стабильно позиционировать руку пациента в определенном положении. Если необходимо изменить положение руки пациента в пространстве, оператор сжимает ручку 36, вследствие чего деблокирующий механизм приводится в действие посредством механического расцепляющего механизма. Вследствие активирования ручки 36 соединенные друг с другом посредством шарниров 24-32 элементы фиксации 12-22 могут перемещаться относительно друг друга, так что оператор может выравнивать фиксатор 10 по своему усмотрению. Если затем оператор вновь отпускает ручку 36, шарниры 24-32 вновь блокируются и фиксатор 10 фиксируется в своем измененном положении.
Приводное усилие, которое должен приложить оператор к ручке 36 для деблокирования фиксатора 10, зависит от нагрузки, которой нагружен фиксатор 10. Эта нагрузка состоит из собственно веса фиксатора 10 и веса позиционированной в определенном положении руки. Чем тяжелее рука пациента, тем соответственно больше должно быть приводное усилие, которое оператор должен приложить к ручке 36 для деблокирования фиксатора 10.
Если оператор воздействует на ручку 36 с достаточно большим приводным усилием, фиксатор мгновенно деблокируется. Это означает, что фиксатор 10 сразу же не выдерживает нагрузки, то есть по существу веса руки пациента. Эта податливость фиксатора 10 не столь проблематична, пока позиционированный на фиксаторе 10 вес относительно невелик. В этом случае оператор может противостоять внезапному отпаду фиксатора 10 тем, что своей рукой, которой он держит ручку 36, прилагает противоположное весу руки пациента ответное усилие, то есть, как правило, при давлении нагрузки вниз слегка поджимает ручку 36 вверх.
Однако если нагрузка зафиксированной в определенном положении руки пациента относительно велика, оператор после деблокирования фиксатора 10 должен приложить соответственно большое ответное усилие, чтобы стабилизировать фиксатор 10. Так как деблокирование фиксатора 10 осуществляется мгновенно, то оператор должен реагировать быстро, что затрудняет манипулирование фиксатора 10. Следовательно, оператор может заранее воспрепятствовать мгновенному отпаду фиксатора 10 тем, что пока он одной рукой активирует ручку 36, своей второй рукой он поддерживает снизу фиксатор 10. Это в целом облегчает также деблокирование фиксатора 10. Однако на практике часто случается так, что оператор забывает об этой предохранительной мере поддержки фиксатора 10 и таким образом его застигает врасплох, что при деблокировании фиксатор 10 внезапно теряет свою стабильность и отпадает вниз. Это затрудняет манипулирование фиксатора 10.
Задача изобретения состоит в том, чтобы усовершенствовать определенное для стопорного механизма, активируемое вручную устройство для деблокирования вышеназванного типа, сделать его манипулирование проще и надежнее, чем прежде.
Изобретение решает эту задачу тем, что преобразующий механизм имеет упругодеформируемый ограничитель усилия, посредством которого элемент передачи усилия соединен с расцепляющим механизмом и который за счет своего упругого деформирования препятствует передаче приводного усилия на расцепляющий механизм, если приводное усилие превышает заданную величину.
Изобретение выгодно использует то обстоятельство, что приводное усилие, которое для деблокирования стопорного механизма должно быть приложено вручную на орган управления, зависит от позиционированной нагрузки, в частности, оно становится больше с увеличением нагрузки. Это означает, что прилагаемое для деблокирования стопорного механизма усилие может быть рассматриваемо как мерило для нагрузки, которым нагружен стопорный механизм. Указанное обстоятельство, что приводное усилие возрастает с увеличением нагрузки, содержит также страховочный аспект в том смысле, что позволяет избежать по недосмотру деблокирования при большой нагрузке.
Изобретение предусматривает упругодеформируемый ограничитель усилия, который позволяет передавать оказываемое вручную на орган управления приводное усилие на расцепляющий механизм лишь тогда, когда приводное усилие не превышает заданную величину. Так как приводное усилие, как обозначено выше, является мерилом воздействующей на стопорный механизм нагрузки, то ограничитель усилия препятствует передаче приводного усилия на расцепляющий механизм и, следовательно, деблокированию находящегося под нагрузкой стопорного механизма, если эта нагрузка превышает заранее установленное значение. И, наоборот, это означает, что деблокирование стопорного механизма возможно только путем активирования органа управления согласно изобретению лишь тогда, когда нагрузка не превышает это заданное значение.
Если оператор активирует орган управления и констатирует при этом, что это не позволяет ему деблокировать стопорный механизм, следовательно, оператор осознает, что воздействующая на стопорный механизм нагрузка превышает заданное значение. После того, как оператор осознал это, он может, например, продолжая прилагать одной рукой приводное усилие на орган управления, поддержать этой же рукой или своей другой рукой стопорный механизм, чтобы противодействовать воздействующей на стопорный механизм нагрузке и, следовательно, разгрузить стопорный механизм. Если таким образом стопорный механизм в достаточной степени разгружен, оператор может деблокировать стопорный механизм путем приложения приводного усилия на орган управления. Это позволяет надежно исключить возможность того, что оператора застанет врасплох мгновенный переход стопорного механизма из состояния удержания нагрузки в состояние, не позволяющее удержать нагрузку. Кроме того, ограничение действующего приводного усилия позволяет избежать повреждения составных частей устройства деблокирования и/или стопорного механизма вследствие чрезмерного силового воздействия. Наконец, ограничение приводного усилия обеспечивает хорошую эргономику в плане ручного активирования.
В предпочтительной форме осуществления, ограничитель усилия представляет собой пружину, сила возврата которой рассчитана таким образом, что пружина сохраняет свою изначальную форму, если приводное усилие меньше или равно заданной величине, и что пружина упруго деформируется, если приводное усилие превышает заданную величину. Если приводное усилие достаточно мало, подключенная между элементом передачи усилия и расцепляющим механизмом пружина действует по существу как жесткий элемент, так что приложенное на орган управления приводное усилие воздействует через пружину на расцепляющий механизм практически с неослабленным усилием и деблокирует стопорный механизм. Если же, напротив, приложенное на орган управления приводное усилие настолько велико, что оператору приходится разгрузить стопорный механизм до его деблокирования, чтобы мгновенно возникающая нестабильность стопорного механизма не застала его врасплох, в таком случае пружина вследствие своей упругой деформации в известной степени поглощает приложенное приводное усилие, так что оно больше не воздействует на расцепляющий механизм и стопорный механизм остается заблокированным. Лишь с разгрузкой стопорного механизма прилагаемое на орган управления приводное усилие вновь настолько мало, что оно не приводит к упругому деформированию пружины и приводное усилие передается на расцепляющий механизм.
Предпочтительно, пружина представляет собой пружину сжатия, которая сдавливается между элементом передачи усилия и расцепляющим механизмом, если приложенное на орган управления приводное усилие превышает заданную величину.
В предпочтительной форме осуществления, преобразующий механизм включает выполненную на органе управления первую систему зубьев и выполненную на элементе передачи усилия вторую систему зубьев, которая сопряжена с первой системой зубьев. Образованный таким образом из двух систем зубьев механизм особенно годится, чтобы приведение в действие органа управления преобразовать, например, в линейное движение элемента передачи усилия и, следовательно, в соответствующее движение соединенного посредством ограничителя усилия с элементом передачи усилия расцепляющего механизма (при условии, что приводное усилие не превышает заданную величину).
В альтернативной форме осуществления, преобразующий механизм включает выполненную на органе управления подвижную прижимную поверхность и коленчатый рычаг с первым, более длинным плечом, и вторым, более коротким плечом, при этом первое, более длинное плечо коленчатого рычага на одном конце оперто в первой неподвижной точке поворота внутри деблокирующего устройства, второе, более короткое плечо коленчатого рычага на одном конце оперто с возможностью поворота во второй точке поворота, неподвижной относительно совершающего движение элемента передачи усилия, оба плеча соответственно на своем другом конце оперты в совместной третьей точке поворота, а прижимная поверхность при ручном активировании органа управления давит на коленчатый рычаг в зоне третьей точки поворота. Благодаря использованию коленчатого рычага достигается заторможенная передача приводного усилия при остающейся неизменной скорости активирования. Это означает, что при остающейся неизменной скорости активирования скорость подъема, с которой перемещается элемент передачи усилия, снижается, в то время как возрастает силовое воздействие со стороны элемента передачи усилия. Приводное усилие, осуществляемое оператором, реализуется с торможением, так что оператор при активировании органа управления может лучше приспособиться к предстоящему деблокированию стопорного механизма. Кроме того, при этом возможна большая передача усилия.
Предпочтительно, элемент передачи усилия имеет участок в форме полого цилиндра, в котором установлен ограничитель усилия. Это обеспечивает особенно компактную конструкцию деблокирующего устройства. Расцепляющий механизм включает, например, разъединяющий стержень, который линейно перемещается в направлении своей продольной оси. Разъединяющий стержень может перемещаться в этом случае, по меньшей мере, частично внутри выполненного в длину ограничителя усилия. Если ограничитель усилия представляет собой, например, винтовую пружину, то в этом конструктивном исполнении часть разъединяющего стержня выступает внутрь винтовой пружины. Это также способствует особенно компактной конструкции деблокирующего устройства.
Предпочтительно, предусмотрен упор, который ограничивает упругое деформирование ограничителя усилия. Если ограничителем усилия, например, является пружина сжатия, то упор гарантирует, что пружина сжатия сдавливается настолько сильно, что создаваемый таким образом путь пружины находится еще в пределах рабочего диапазона, установленного посредством заданной характеристики пружины. Этим обеспечивается, что пружина может в течение длительного времени надежно выполнять свою функцию, а именно способствовать или препятствовать передаче на расцепляющий механизм приложенного на орган управления приводного усилия в зависимости от величины этого усилия.
Вышеназванный упор представляет собой, например, входящую в контакт с элементом передачи усилия упорную поверхность. В этой форме осуществления, упор ограничивает подъем элемента передачи усилия. Впрочем, допустимо также, что упор взаимодействует, например, с органом управления, чтобы ограничить его путь активирования.
Согласно другому аспекту изобретения, предусмотрен находящийся под нагрузкой стопорный механизм, который содержит описанное выше деблокирующее устройство.
В дальнейшем изобретение поясняется более детально на основе чертежей. При этом показано:
Фиг. 1 - обычный фиксатор для опорного позиционирования руки пациента;
Фиг. 2 - продольный разрез применяемого на фиксаторе с фиг. 1 деблокирующего устройства согласно первому примеру осуществления в состоянии, в котором ручка деблокирующего устройства не активирована и фиксатор заблокирован;
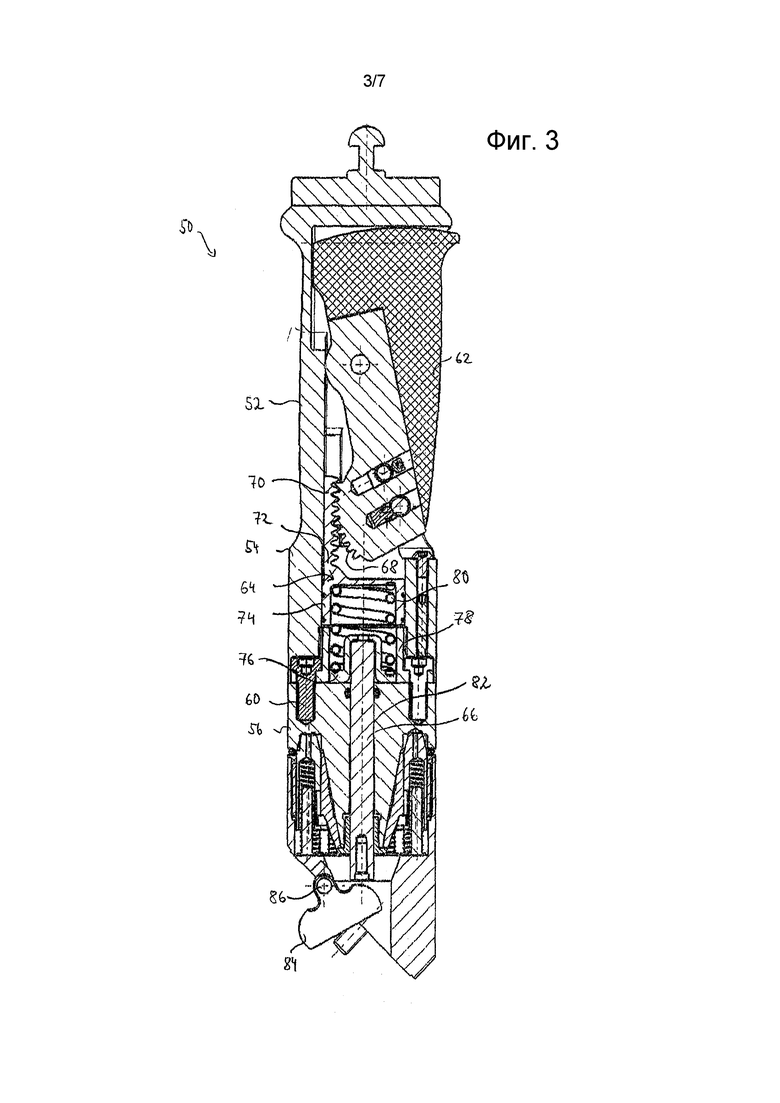
Фиг. 3 - продольный разрез деблокирующего устройства с фиг. 2 в состоянии, в котором ручка активирована и, таким образом, фиксатор разблокирован;
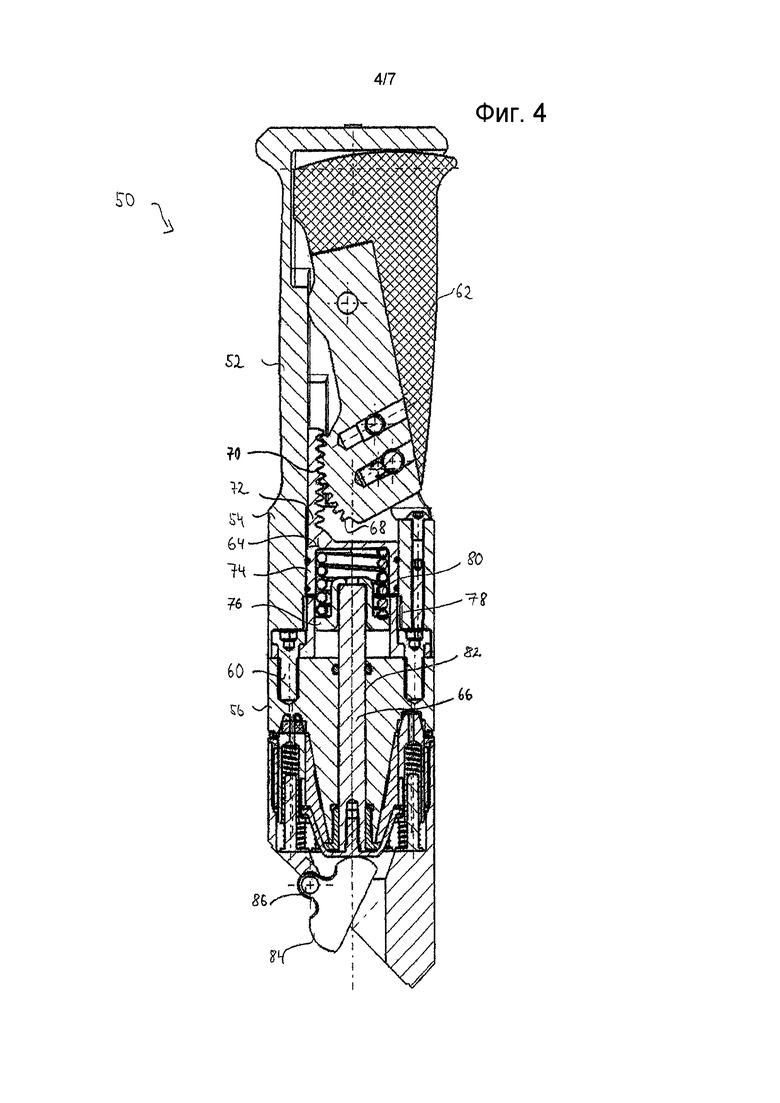
Фиг. 4 - продольный разрез деблокирующего устройства с фиг. 2 в состоянии, в котором ручка активирована и фиксатор тем не менее остается заблокированным;
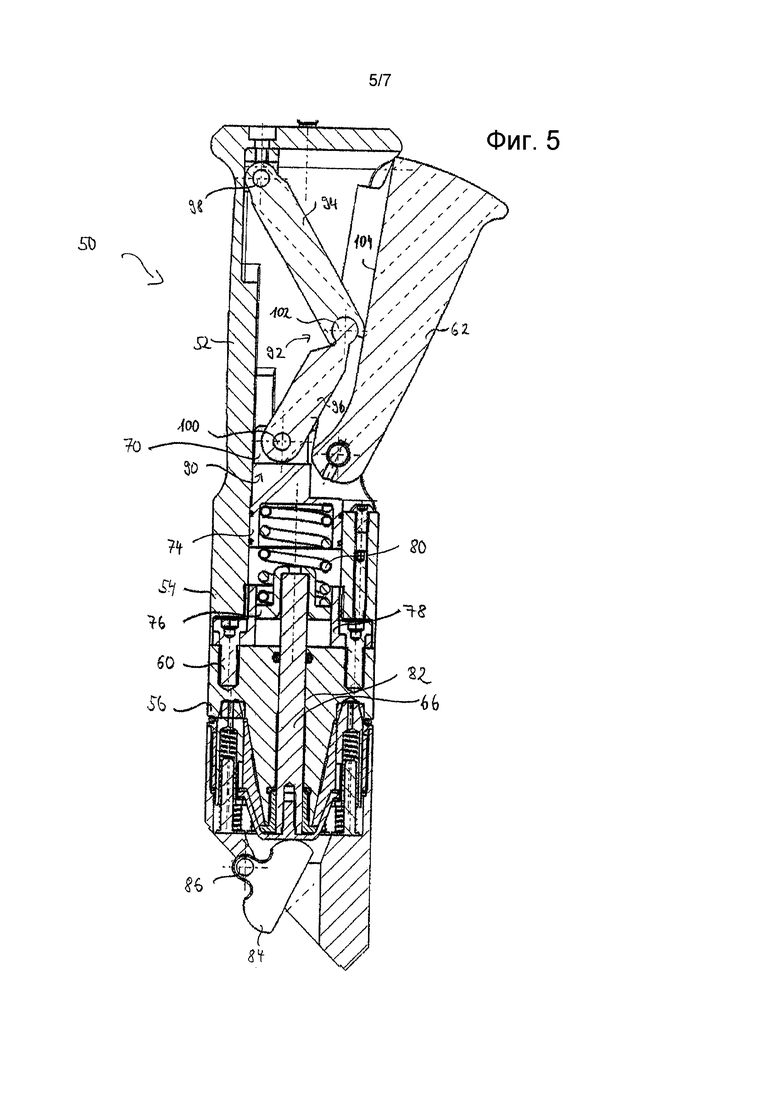
Фиг. 5 - продольный разрез применяемого на фиксаторе с фиг. 1 деблокирующего устройства согласно второму примеру осуществления в состоянии, в котором ручка деблокирующего устройства не активирована и фиксатор заблокирован;
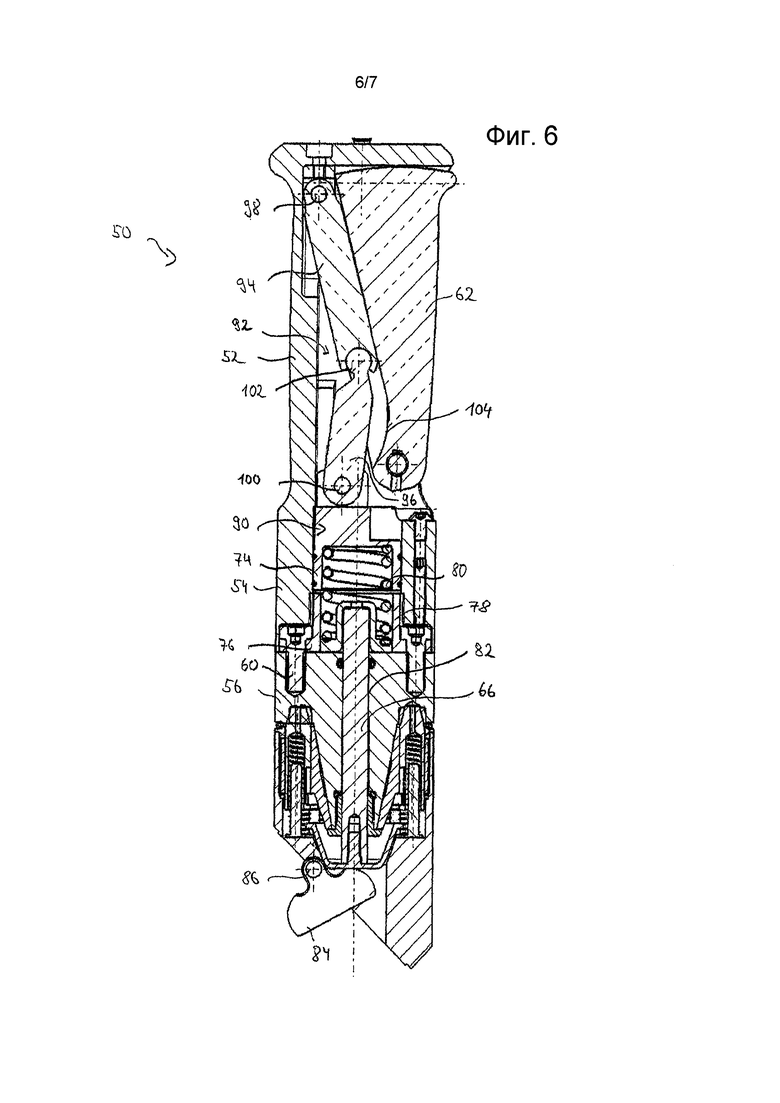
Фиг. 6 - продольный разрез деблокирующего устройства с фиг. 5 в состоянии, в котором ручка активирована и фиксатор разблокирован; и
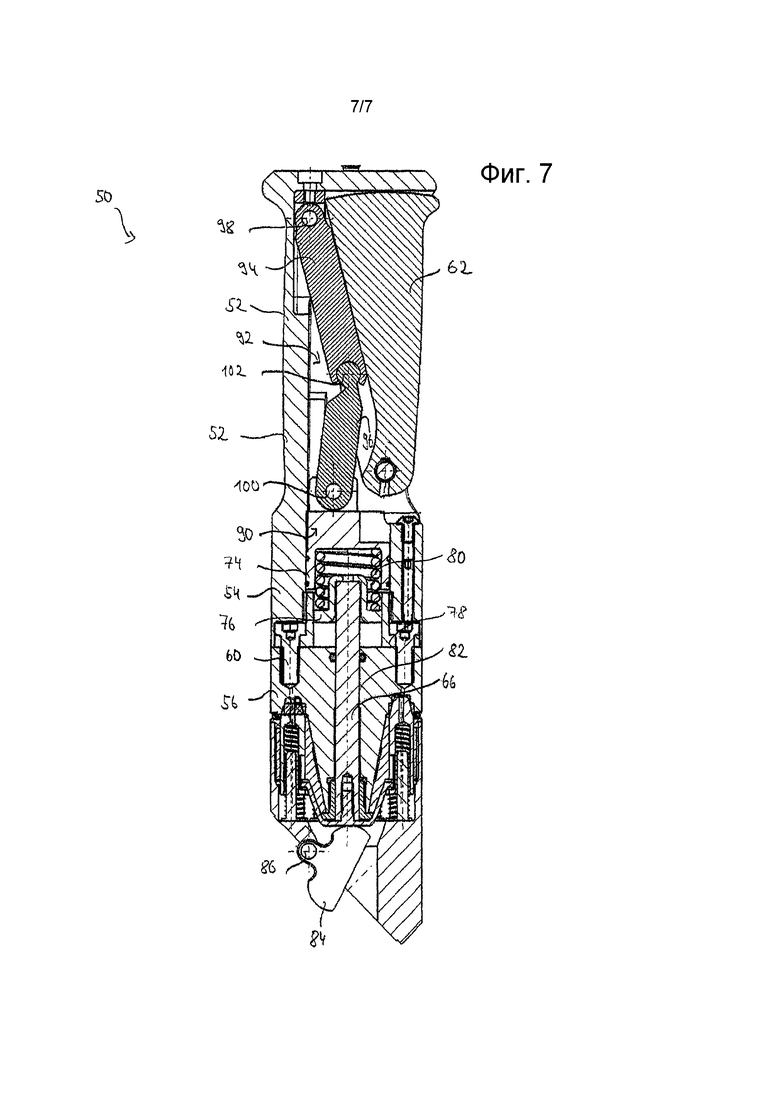
Фиг. 7 - продольный разрез деблокирующего устройства с фиг. 2 в состоянии, в котором ручка активирована и фиксатор, тем не менее, остается заблокированным.
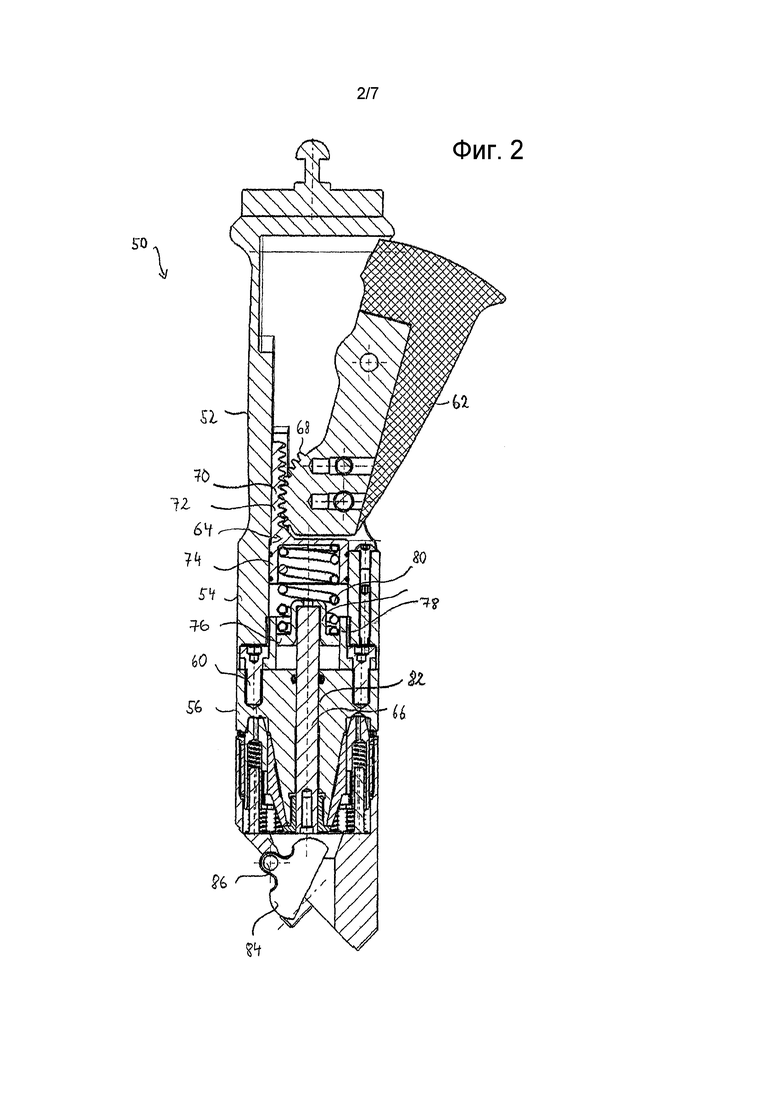
На фиг. 2 показано в продольном разрезе деблокирующее устройство 50 как первый пример осуществления. Деблокирующее устройство 50 приемлемо для того, чтобы разблокировать описанным ниже способом показанный на фиг. 1 фиксатор 10.
Деблокирующее устройство 50 имеет удлиненный корпус 52, который образован из двух корпусных деталей 54 и 56, соединенных друг с другом резьбовыми соединениями 58 и 60. Деблокирующее устройство 50 содержит также активируемую вручную оператором ручку 62, обозначенную на фиг. 2 в целом позицией 64 преобразующий механизм и перемещающийся вдоль продольной оси корпуса разъединяющий стержень 66. Преобразующий механизм 64 в первом примере осуществления представлен механизмом, который включает выполненный на ручке 62 участок шестерни 68 и сопряженную с участком шестерни 68 зубчатую направляющую 70. Зубчатая направляющая 70 является частью элемента передачи усилия 72, который на своем обращенном от зубчатой рейки 70 конце имеет полый цилиндрический участок 74.
На обращенном к ручке 62 конце разъединяющего стержня 66 монтируется подставка 76, которая вместе с жестким упором 78 в форме полого цилиндра образует пространство, в котором расположена нагружаемая давлением винтовая пружина 80.
Разъединяющий стержень 66 проходит через выполненное в корпусной детали 56 сквозное отверстие 82. Таким образом разъединяющий стержень 66 может перемещаться в направлении продольной оси корпуса 52. Разъединяющий стержень 66 служит для приведения в действие деблокирующего механизма, который содержит не показанный на фиг. 2 фиксатор. Из деблокирующего механизма на фиг. 2 показан лишь один отдельный компонент 84 деблокирования, который установлен с возможностью поворота вокруг поворотной оси 86. Под давлением разъединяющего стержня 66 на компонент 84 деблокирования последний движется вокруг поворотной оси 86 для деблокирования фиксатора.
Винтовая пружина 80, посредством которой элемент передачи усилия 72 соединен с разъединяющим стержнем 66, образует ограничитель усилия, который служит для того, чтобы прилагаемое вручную оператором на ручку 62 приводное усилие посредством преобразующего механизма 64 лишь тогда передавалось на разъединяющий стержень 66 и соответственно на компонент 84 разблокирования, когда приводное усилие не превышает заданную величину.
Усилие, с которым винтовая пружина 80 противодействует ее сжатию, выбирают исключительно таким образом, что винтовая пружина 80 сжимается лишь тогда, когда приводное усилие превышает заданную величину. В этом случае, винтовая пружина 80 в определенной степени поглощает приложенное посредством ручки 62 на элемент передачи усилия 72 приводное усилие в меру ее упругого сжатия. Если же, напротив, приводное усилие меньше или равно заданной величине, то его недостаточно, чтобы сжать винтовую пружину 80. Винтовая пружина образует в таком случае жесткий связующий элемент между элементом передачи усилия 72 и разъединяющим стержнем 66, так что вызванное активированием ручки 62 движение элемента передачи усилия 72 преобразуется в соответствующее движение разъединяющего стержня 66 в направлении продольной оси корпуса 52, вследствие чего компонент 84 разблокирования движется вокруг поворотной оси 86 и, наконец, фиксатор деблокируется.
На фиг. 2-4 показан принцип действия деблокирующего устройства 50, в частности, образованного винтовой пружиной 80 ограничителя усилия.
На фиг. 2 ручка 62 не активирована. Соответственно, разъединяющий стержень 66 остается в своем положении блокировки, в котором он не воздействует на компонент 84 деблокирования. Фиксатор заблокирован.
На фиг. 3 ручка 62 приведена в действие приводным усилием (зависящим от нагрузки), которого недостаточно, чтобы в значительной мере сжать винтовую пружину 80. В этом состоянии винтовая пружина 80 образует, следовательно, по существу жесткий элемент, который вместе с элементом передачи усилия 72 перемещается вниз в направлении продольной оси корпуса 52 вплоть до того, как полый цилиндрический участок 74 элемента передачи усилия входит в контакт с жестким упором 78. Следовательно, приводное усилие передается на разъединяющий стержень 66, вследствие чего он перемещается в положение деблокирования и компонент 84 деблокирования поворачивается вокруг поворотной оси 86. Фиксатор деблокируется.
На фиг. 4 ручка 62 приводится в действие приводным усилием (зависящим от нагрузки), величина которого достаточна, чтобы сжать винтовую пружину 80. Винтовая пружина поглощает таким образом приложенное приводное усилие, вследствие чего разъединяющий стержень 66 остается в положении блокировки и не воздействует на компонент 84 деблокирования. Фиксатор 10, вопреки активированию ручки 62, остается заблокированным.
На фиг. 5-7 изображен вариант деблокирующего устройства 50 в качестве второго примера осуществления. Второй пример осуществления отличается от показанного на фиг. 2-4 первого примера осуществления лишь модифицированным преобразующим механизмом, который на фиг. 5-7 обозначен позицией 90. Те компоненты второго примера осуществления, которые в своей функции совпадают с компонентами первого примера осуществления, снабжены позициями, использованными в первом примере осуществления.
Модифицированный относительно первого примера осуществления преобразующий механизм 90 содержит коленчатый рычаг 92, который образован первым, более длинным плечом 94, и вторым, более коротким плечом 96. Первое плечо 94 одним концом оперто на поворотную ось 98, которая жестко закреплена в корпусе 52. Поворотная ось 98 образует, следовательно, относительно корпуса 52 первую, неподвижную точку поворота коленчатого рычага 92. Второе плечо 96 своим обращенным от первого плеча 94 концом оперто на поворотную ось 100, которая жестко закреплена на элементе передачи усилия 72, который может перемещаться в направлении продольной оси корпуса 52. Поворотная ось 100 образует, следовательно, вторую точку поворота, которая перемещается вместе с элементом передачи усилия 72.
Оба плеча 94 и 96, на своих обращенных друг к другу концах, соединены между собой с возможностью поворота. С этой целью второе плечо 96 имеет на своем конце приблизительно шаровидный в поперечном сечении участок 102, который оперт в соответствующем шаровидном гнезде, выполненном на обращенном ко второму плечу конце первого плеча 94а. За счет этого поворотного соединения обоих плеч 94 и 96 создана общая, третья подвижная точка поворота коленчатого рычага 92.
Коленчатый рычаг 92 контактирует в зоне своей третьей точки поворота с прижимной поверхностью 104, которая выполнена на ручке 62. При активировании оператором ручки 62, оба плеча 94 и 96, как показано на фиг. 6, ориентированы вертикально, при этом коленчатый рычаг 92 приобретает в целом форму, в которой он расположен приблизительно параллельно продольной оси корпуса 92. Благодаря этой ориентации коленчатого рычага 92 приложенное на ручку 62 приводное усилие передается на элемент передачи усилия 72, вследствие чего он перемещается вниз в направлении продольной оси корпуса 52 (на фиг. 5-7).
Впрочем, показанный на фиг. 5-7 второй пример осуществления работает идентично первому примеру осуществления на фиг. 2-4. При этом показанное на фиг. 5 состояние, в котором ручка 62 не активирована и поэтому фиксатор заблокирован, соответствует состоянию с фиг. 2, между тем как представленное на фиг. 6 состояние, в котором ручка 62 активирована и фиксатор деблокирован, соответствует состоянию с фиг. 3, а представленное на фиг. 7 состояние, в котором ручка 62 также активирована, но фиксатор остается заблокированным, соответствует состоянию с фиг. 4.
Изобретение относится к вспомогательной медицинской технике. Устройство для ручного деблокирования находящегося под нагрузкой стопорного механизма включает орган управления, который для деблокирования стопорного механизма вручную активируется приводным усилием, которое возрастает с увеличением нагрузки, преобразующий механизм, который имеет соединенный с органом управления элемент передачи усилия и соединенный с элементом передачи усилия расцепляющий механизм, который для деблокирования стопорного механизма приводным усилием, которое элемент передачи усилия передает на расцепляющий механизм, из положения блокировки, в котором расцепляющий механизм функционально отсоединен от стопорного устройства, выполнен с возможностью перемещения в положение деблокирования, в котором расцепляющий механизм функционально соединен со стопорным механизмом для его деблокирования. Согласно изобретению, преобразующий механизм имеет упругодеформируемый ограничитель усилия, посредством которого элемент передачи усилия соединен с расцепляющим механизмом и который за счет своего упругого деформирования препятствует передаче приводного усилия на расцепляющий механизм, если приводное усилие превышает заданную величину. 2 н. и 12 з.п. ф-лы, 7 ил.
1. Устройство (50) для ручного деблокирования находящегося под нагрузкой стопорного механизма (10), включающее:
- орган (62) управления, который для деблокирования стопорного механизма (10) вручную активируется приводным усилием, которое возрастает с увеличением нагрузки,
- преобразующий механизм (64, 90), который имеет соединенный с органом управления (62) элемент (72) передачи усилия, и
- соединенный с элементом (72) передачи усилия расцепляющий механизм (66), который для деблокирования стопорного механизма (10) приводным усилием, которое элемент (72) передачи усилия передает на расцепляющий механизм (66), из положения блокировки, в котором расцепляющий механизм (66) функционально отсоединен от стопорного устройства, выполнен с возможностью перемещения в положение деблокирования, в котором расцепляющий механизм (66) функционально соединен со стопорным механизмом для его деблокирования,
отличающееся тем, что преобразующий механизм (64, 90) имеет упругодеформируемый ограничитель (80) усилия, посредством которого элемент (72) передачи усилия соединен с расцепляющим механизмом (66) и который за счет своего упругого деформирования препятствует передаче приводного усилия на расцепляющий механизм (66), если приводное усилие превышает заданную величину.
2. Устройство (50) по п. 1, отличающееся тем, что удлиненный корпус (52), в котором преобразующий механизм (64, 90) преобразует приложенное вручную на орган (62) управления приводное усилие в движение элемента (72) передачи усилия вдоль продольной оси корпуса, и ограничитель усилия (80) упруго деформируется вдоль продольной оси корпуса.
3. Устройство (50) по п. 1 или 2, отличающееся тем, что ограничитель усилия представляет собой пружину (80), усилие возврата которой рассчитано таким образом, что пружина (80) сохраняет свою первоначальную форму, если приводное усилие меньше или равно заданной величине, и пружина (80) упруго деформируется, если приводное усилие превышает заданную величину.
4. Устройство (50) по п. 3, отличающееся тем, что пружина (80) выполнена в виде пружины сжатия.
5. Устройство (50) по п. 1, отличающееся тем, что преобразующий механизм (64) включает выполненную на органе управления (62) первую систему (68) зубьев и выполненную на элементе (72) передачи усилия вторую систему (70) зубьев, которая находится в зацеплении с первой системой (68) зубьев.
6. Устройство (50) по п. 1, отличающееся тем, что
- преобразующий механизм (90) включает выполненную на органе управления (62) подвижную прижимную поверхность (104) и коленчатый рычаг (92) с первым, более длинным плечом (94), и вторым, более коротким плечом (96),
- первое, более длинное плечо (94) коленчатого рычага (92), на одном конце оперто с возможностью поворота в первой неподвижной точке поворота внутри устройства,
- второе, более короткое плечо (96) коленчатого рычага (92),на одном конце оперто с возможностью поворота во второй точке поворота, неподвижной относительно перемещающегося элемента (72) передачи усилия,
- оба плеча (94, 96) соответственно на своем другом конце оперты в совместной третьей точке поворота, и
- прижимная поверхность (104) при ручном активировании органа управления (62) давит на коленчатый рычаг (92) в зоне третьей точки поворота.
7. Устройство (50) по п. 1, отличающееся тем, что орган управления представляет собой установленную с возможностью поворота ручку (62).
8. Устройство (50) по п. 1, отличающееся тем, что элемент (72) передачи усилия имеет полый цилиндрический участок (74), в котором установлен ограничитель усилия (80).
9. Устройство (50) по п. 1, отличающееся тем, что расцепляющий механизм включает разъединяющий стержень (66), который линейно перемещается в направлении своей продольной оси.
10. Устройство (50) по п. 9, отличающееся тем, что разъединяющий стержень (66) перемещается, по меньшей мере, частично внутри выполненного удлиненным ограничителя усилия (80).
11. Устройство (50) по п. 1, отличающееся тем, что снабжено упором (78), который ограничивает упругое деформирование ограничителя усилия (80).
12. Устройство (50) по п. 11, отличающееся тем, что упор образован входящей в контакт с элементом (72) передачи усилия упорной поверхностью.
13. Находящийся под нагрузкой стопорный механизм (10), включающий устройство (50) для его деблокирования по одному из пп. 1-12.
14. Стопорный механизм (10) по п. 13, отличающийся тем, что стопорный механизм представляет собой выполненный для опирания части тела пациента держатель, который содержит по меньшей мере два жестких элемента фиксации (12, 14, 16, 18, 20, 22) и один шарнир (24, 26, 28, 30, 32), который соединяет друг с другом оба элемента фиксации (12, 14, 16, 18, 20, 22), а также содержит деблокирующий механизм, который взаимодействует с расцепляющим механизмом (66) таким образом, что шарнир (24, 26, 28, 30, 32) жестко соединяет между собой оба элемента фиксации (12, 14, 16, 18, 20, 22) в положении блокировки расцепляющего механизма (66) и соединяет их между собой подвижно в положении деблокирования расцепляющего механизма (66).
| УСТРОЙСТВО ДЛЯ РАЗЪЕМНОГО РАЗМЕЩЕНИЯ ВСПОМОГАТЕЛЬНОГО ОБОРУДОВАНИЯ НА ОПЕРАЦИОННОМ СТОЛЕ | 2007 |
|
RU2430712C2 |
| US 7140055 B2, 28.11.2006 | |||
| Замок с механической блокировкой | 1936 |
|
SU74805A1 |
| US 5537700 A1, 23.07.1996.. | |||

