Изобретение относится к области электротехники и может быть использовано в высоковольтных электроприводах с многоуровневым инвертором напряжения для управления торможением асинхронных и синхронных электродвигателей, а также в низковольтных частотных электроприводах.
В настоящее время в высоковольтных электроприводах с многоуровневым инвертором напряжения (Высоковольтные электроприводы НПП «ЭКРА» для комплексной автоматизации технологического процесса, экономии ресурсов и энергосбережения. Труды VIII международной конференции по автоматизированному электроприводу АЭП-2014) нашел применение способ динамического торможения с заданным темпом торможения с использованием тормозных резисторов. Применение такого способа для многоуровневых инверторов напряжения требует установки на каждую силовую ячейку тормозного резистора и тормозного модуля со своей системой управления, что приводит к значительному увеличению габаритов многоуровневого инвертора, а рассеивание энергии на тормозном резисторе - к значительному уменьшению надежности и кпд электропривода.
В многоуровневых инверторах среднего напряжения серии TMdrive-MV (Руководство по настройке параметров, 2010 г., TOSHIBA MITSUBISHI-ELECTRIC INDUSTRIAL SYSTEMS CORPORATION) предусмотрены ограничения темпов ускорения и замедления при торможении, темпов ускорения и замедления квадратичной нагрузки и уровней крутящего момента нагрузки на разных скоростях и т.д. Неправильная установка любого параметра из трех десятков параметров, предназначенных для ограничения регенерации мощности электродвигателя в конденсаторы силовых ячеек, может привести к перенапряжениям в шине постоянного тока или может вызвать перегрузку по току силовых элементов и выходу из строя многоуровневого инвертора. Ограничение регенерации мощности электродвигателя приводит к снижению быстродействия электропривода. Основным недостатком инверторов среднего напряжения серии TMdrive-MV является сложность наладки и снижение надежности.
Наиболее близким аналогом, принятым за прототип предлагаемого изобретения, является способ двухчастотного торможения компании Siemens, применяемый в многоуровневых преобразователях частоты серии Perfect Harmony (Руководство пользователя к продукту GENIV А1А119001591, февраль 2008 г.). Компания Siemens имеет патенты США US 6417644 B2 и US 6262555 B1, в которых приведены устройство и способ генерации тормозного момента.
Способ двухчастотного торможения заключается в применении двух систем напряжений для управления скоростью электродвигателя в режиме торможения. Первая система напряжений соответствует обычной системе напряжений по частоте и по амплитуде, которая необходима на соответствующей скорости торможения. Вторая система напряжений создает вращающееся магнитное поле противоположного направления, который приводит к повышенному отрицательному скольжению двигателя и к дополнительным потерям в электродвигателе. Вторая система напряжений должна быть выбрана так, чтобы ток электропривода не превышал величины допустимого тока инвертора, и свести к минимуму пульсации крутящего момента электродвигателя. При таком способе управления торможением величина пульсаций крутящего момента электродвигателя может достигать 70%. Минимальную величину пульсаций крутящего момента можно достичь при частоте пульсаций, равной сумме частот, соответствующих скорости электродвигателя и скорости вращения магнитного поля противоположного направления.
Обоснование способа двухчастотного торможения в патентах США проведено без учета влияния высших гармоник магнитного поля на работу асинхронного электродвигателя. Высшие гармоники поля в электродвигателе могут появиться даже при питании их синусоидальным напряжением вследствие конструктивных особенностей, насыщения электродвигателя и искажения питающего напряжения инвертором (Мейстель A.M. Динамическое торможение приводов с асинхронными двигателями, 1967 г.).
Высшие гармонические составляющие питающего напряжения обуславливают появление высших гармонических тока и магнитного потока, которые приводят к появлению вращающих и тормозящих моментов от взаимодействия токов и потоков одного порядка, а также колебательных моментов (Вольдек А.И. Электрические машины, 1978 г.) от взаимодействия между собой гармонических разных порядков. Направления вращения магнитных полей, созданных высшими гармоническими тока различны. Пятая и одиннадцатая гармонические магнитного потока порядка (6n-1) вращаются в сторону, противоположную направлению вращения основного магнитного поля (поля первой гармонической), которые в диапазоне скольжения 0<S1<(1+n1/5), (1+n1/11) (n1 - синхронная скорость основного поля) создают тормозной момент противовключения. Направление вращения поля седьмой и тринадцатой гармонических магнитного потока порядка (6n+1) совпадают с первой гармонической, которые в диапазоне скольжения 0<S1<n1/7, n1/13 создают рекуперативный тормозной момент, а в диапазоне n1/7, n1/13<S1<1 развивают двигательный момент. При величине скольжения S1=n1/7, n1/13 может резко меняться баланс моментов тормозного на двигательный режим. При этом режим рекуперации в тормозном режиме приводит к недопустимому повышению напряжения конденсаторов в силовых ячейках. Если в диапазоне n1/7, n1/13<S1<1 баланс моментов остается тормозным, то режим противовключения может привести к развороту двигателя в противоположном направлении. При таком способе управления торможением вследствие резкого изменения баланса моментов в процессе торможения снижается надежность.
Электропривод двухчастотным управлением торможения имеет:
1. Низкую надежность:
- частые повреждения механизмов и электродвигателя из-за возникновения знакопеременных моментов,
- повышение напряжения конденсаторов в силовых ячейках,
- возможен разворот двигателя в противоположном направлении из-за разбаланса двигательного и тормозного моментов.
2. Низкую энергетическую эффективность:
- потребление электрической энергии на порядок больше, чем при динамическом торможении,
- перегрев электродвигателя из-за выделения тепла от протекания высших гармоник тока.
Техническая сущность предлагаемого способа заключается в устранении вышеуказанных недостатков способа двухчастотного торможения, повышении надежности и эффективности электропривода в режиме торможения с многоуровневым инвертором напряжения.
На приведенной фиг. 1 фазы A, B и C электродвигателя М подключены к вторичным обмоткам трансформатора, соответственно, через последовательно включенные силовые ячейки А1-А3, В1-В3 и С1-С3. Инверторы силовых ячеек выполнены на базе четырех силовых ключей Q1-Q4.
В предлагаемом способе управления торможением частотного электропривода с многоуровневым инвертором напряжения, обеспечивающим выходное напряжение каждой фазы путем сложения напряжения последовательно включенных силовых ячеек, к каждому из которых подведено трехфазное напряжение от входного трансформатора, вторичные обмотки которого подключены к силовым ячейкам трех фаз двигателя, обеспечивающим изменение формируемых на несущей частоте ширины импульсов выходного силового напряжения путем подачи управляющего сигнала на открытие ключей в противоположных плечах управляемого моста каждой силовой ячейки для получения положительного или отрицательного выходного напряжения и на открытие ключей в смежных плечах управляемого моста для получения нулевого выходного напряжения, на первом этапе обеспечивают совмещенное с динамическим магнитное торможение, а на втором этапе - магнитное торможение.
На первом этапе последовательность импульсов выходного силового напряжения со скважностью γ создает ток динамического торможения. На участках между импульсами выходного силового напряжения в паузе 1-γ замыкаются статорные обмотки, т.е. обеспечивается так называемое магнитное торможение. Динамическое торможение считается наиболее надежным способом, а магнитное торможение, т.е. режим замыкания статорных обмоток, считается наиболее эффективным способом управления торможением (Мейстель A.M., Динамическое торможение приводов с асинхронными двигателями, 1967 г.).
На втором этапе торможения открытием ключей в смежных плечах управляемого моста замыкаются статорные обмотки и обеспечивается магнитное торможение. Использование магнитного торможения не требует дополнительных расходов электрической энергии, так как электромагнитная энергия, накопленная на первом этапе во время динамического торможения, используется для торможения до полной остановки ротора электродвигателя. При этом отпадает необходимость контроля скорости для обесточивания электродвигателя, так как электромагнитная энергия, накопленная на первом участке, разрядилась в статорной обмотке и не будет дополнительного нагрева электродвигателя, как при динамическом способе торможения.
Переключение силовыми ключами многоуровневых инверторов напряжения позволяет реализовать два способа динамического торможения:
1. Трехфазный способ торможения, когда ток динамического торможения протекает по трем обмоткам статора, которые соединены в нейтральной точке.
2. Двухфазный способ торможения, когда ток динамического торможения протекает по двум обмоткам статора, которые последовательно соединены в нейтральной точке.
Для реализации трехфазного способа на первом этапе ключи второй 2 и четвертый 4 (первый 1 и третий 3) силовых ячеек трех фаз замкнуты, кроме одной ячейки. Ключи первый 1 и четвертый 4 (второй 2 и третий 3) последней ячейки формируют на несущей частоте импульсы силового напряжения положительного (отрицательного) знака со скважностью γ и обеспечивается нарастание тока динамического торможения. Ключи второй 2 и четвертый 4 (первый 1 и третий 3) замкнуты в паузу равную 1-γ, и обеспечивается частичный разряд электромагнитной энергии, накопленной на первом участке. На втором этапе ключи второй 2 и четвертый 4 (первый 1 и третий 3) всех силовых ячеек трех фаз замкнуты до конца торможения, и обеспечивается полный разряд электромагнитной энергии.
Для реализации двухфазного способа на первом этапе ключи силовых ячеек одной фазы разомкнуты, ключи второй 2 и четвертый 4 (первый 1 и третий 3) силовых ячеек второй и третьей фаз замкнуты кроме как для одной ячейки. Ключи первый 1 и четвертый 4 (второй 2 и третий 3) последней ячейки формируют на несущей частоте импульсы силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения, и обеспечивается нарастание тока динамического торможения. Ключи второй 2 и четвертый 4 (первый 1 и третий 3) замкнуты в паузу равную 1-γ, и обеспечивается частичный разряд электромагнитной энергии накопленной на первом участке. На втором этапе ключи второй 2 и четвертый 4 (первый 1 и третий 3) всех силовых ячеек трех фаз замкнуты до конца торможения. и обеспечивается полный разряд электромагнитной энергии.
Вышеупомянутые двухфазный и трехфазный способы можно использовать для торможения, когда отсутствует поле двигателя.
Для управления торможением двигателя, в статорных обмотках которого протекают токи, рекомендуются следующие модификации последних двух способов:
Для реализации трехфазного способа управления торможением двигателя под током на первом этапе ключи второй 2 и четвертый 4 (первый 1 и третий 3) всех силовых ячеек трех фаз замкнуты, кроме одной ячейки. Ключи первый 1 и четвертый 4 (второй 2 и третий 3) последней ячейки, находящейся в фазе с наибольшим током из трех фаз, которые принимали непосредственное участие в ШИМ силового напряжения в двигательном режиме, продолжают формировать ШИМ силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения. При этом обеспечивается нарастание тока динамического торможения. Ключи второй 2 и четвертый 4 (первый 1 и третий 3) замкнуты в паузу равную 1-γ, и обеспечивается частичный разряд электромагнитной энергии, накопленной на первом участке. На втором этапе ключи второй 2 и четвертый 4 (первый 1 и третий 3) всех силовых ячеек трех фаз замкнуты до конца торможения, и обеспечивается полный разряд электромагнитной энергии.
Для реализации двухфазного способа при торможении двигателя под током на первом этапе размыкаются ключи силовых ячеек фазы с током, близким по величине к нулю. Ключи второй 2 и четвертый 4 (первый 1 и третий 3) силовых ячеек двух фаз замкнуты, кроме одной ячейки. Ключи первый 1 и четвертый 4 (второй 2 и третий 3) последней ячейки фазы с наибольшим током из двух фаз, которые принимали непосредственное участие в ШИМ силового напряжения в двигательном режиме, продолжают формировать ШИМ силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения. При этом обеспечивается нарастание тока динамического торможения. Ключи второй 2 и четвертый 4 (первый 1 и третий 3) замкнуты в паузу равную 1-γ, и обеспечивается частичный разряд электромагнитной энергии, накопленной на первом участке. На втором этапе ключи второй 2 и четвертый 4 (первый 1 и третий 3) всех силовых ячеек трех фаз замкнуты до конца торможения, и обеспечивается полный разряд электромагнитной энергии.
Таким образом, переключение силовых ключей многоуровневых инверторов напряжения позволяет синхронизировать ток динамического торможения ранее протекавшим током двигателя.
Предложенный способ управления торможением частотного электропривода с многоуровневым инвертором напряжения, используя на первом этапе динамическое торможение, как самый надежный способ, совмещенный с магнитным способом, а на втором этапе магнитный, как наиболее эффективный способ, не требует контроля скорости и позволяет значительно повысить надежность и эффективность электропривода в тормозном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2654762C2 |
| СПОСОБ УПРАВЛЕНИЯ ПУСКОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОГРУЖНОГО НАСОСА | 2015 |
|
RU2584817C1 |
| Электропривод переменного тока | 1986 |
|
SU1517105A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| ВЫСОКОВОЛЬТНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2382480C2 |
| Реверсивный тиристорный электропривод переменного тока | 1976 |
|
SU738087A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С ДИФФЕРЕНЦИРОВАННЫМИ НАПРЯЖЕНИЯМИ УРОВНЕЙ И БАЙПАСНЫМИ ПОЛУПРОВОДНИКОВЫМИ КЛЮЧАМИ | 2012 |
|
RU2510769C1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
Способ управления торможением частотного электропривода с многоуровневым инвертором напряжения относится к электротехнике и, в частности, к высоковольтным электроприводам с многоуровневыми инверторами напряжения. Способ управления торможением состоит в совмещении на первом этапе динамического торможения и магнитного торможения, когда закорачиваются статорные обмотки электродвигателя. На втором этапе применяется способ магнитного торможения, приводящий к полному гашению электромагнитной энергии и остановке электродвигателя, при этом нет необходимости в датчике для контроля скорости электродвигателя. Использование на этом этапе магнитного способа торможения позволяет более эффективное гашение электромагнитных процессов в электродвигателе. Техническим результатом является повышение надежности и эффективности электропривода в режиме торможения. 4 з.п. ф-лы, 1 ил.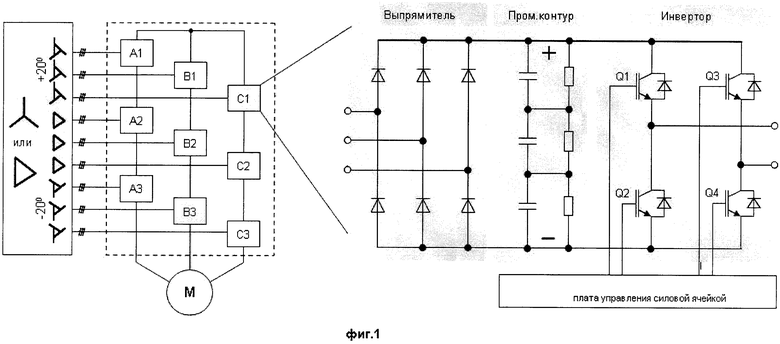
1. Способ управления торможением частотного электропривода с многоуровневым инвертором напряжения, обеспечивающим выходное напряжение каждой фазы путем сложения напряжения последовательно включенных силовых ячеек, к каждому из которых подведено трехфазное напряжение от входного трансформатора, вторичные обмотки которого подключены к силовым ячейкам трех фаз двигателя, обеспечивающим изменение формируемых на несущей частоте ширины импульсов выходного силового напряжения путем подачи управляющего сигнала на открытие ключей в противоположных плечах управляемого моста каждой силовой ячейки для получения положительного или отрицательного выходного напряжения и на открытие ключей в смежных плечах управляемого моста для получения нулевого выходного напряжения, отличающийся тем, что с целью повышения надежности и эффективности электропривода в режиме торможения на первом этапе обеспечивают совмещенное с динамическим магнитное торможение, а на втором этапе - магнитное торможение.
2. Способ по п. 1, отличающийся тем, что на первом этапе ключи второй и четвертый (первый и третий) силовых ячеек всех трех фаз замкнуты, кроме одной ячейки, ключи первый и четвертый (второй и третий) которой формируют на несущей частоте импульсы силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения, а ключи второй и четвертый (первый и третий) замкнуты в паузу равную 1-γ, а на втором этапе ключи второй и четвертый (первый и третий) всех силовых ячеек трех фаз замкнуты до конца торможения.
3. Способ по п. 1, отличающийся тем, что на первом этапе ключи силовых ячеек одной фазы разомкнуты, ключи второй и четвертый (первый и третий) силовых ячеек второй и третьей фаз замкнуты, кроме одной ячейки, ключи первый и четвертый (второй и третий) которой формируют на несущей частоте импульсы силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения, а ключи второй и четвертый (первый и третий) замкнуты в паузу равную 1-γ, а на втором этапе ключи второй и четвертый (первый и третий) всех силовых ячеек трех фаз замкнуты до конца торможения.
4. Способ по п. 2, отличающийся тем, что при торможении двигателя под нагрузкой на первом этапе ключи второй и четвертый (первый и третий) всех силовых ячеек трех фаз замкнуты, кроме одной ячейки, ключи первый и четвертый (второй и третий) фазы с наибольшим током из трех фаз, которые принимали непосредственное участие в ШИМ силового напряжения в двигательном режиме, продолжают формировать ШИМ силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения, а ключи второй и четвертый (первый и третий) замкнуты в паузу равную 1-γ, а на втором этапе ключи второй и четвертый (первый и третий) всех силовых ячеек трех фаз замкнуты до конца торможения.
5. Способ по п. 3, отличающийся тем, что при торможении двигателя под нагрузкой на первом этапе размыкаются ключи силовых ячеек фазы с током, близким по величине к нулю, ключи второй и четвертый (первый и третий) силовых ячеек двух фаз замкнуты, кроме одной ячейки, ключи первый и четвертый (второй и третий) фазы с наибольшим током из двух фаз, которые принимали непосредственное участие в ШИМ силового напряжения в двигательном режиме, продолжают формировать ШИМ силового напряжения положительного (отрицательного) знака со скважностью γ, определяемой заданием величины тока динамического торможения, а ключи второй и четвертый (первый и третий) замкнуты в паузу равную 1-γ, а на втором этапе ключи второй и четвертый (первый и третий) всех силовых ячеек трех фаз замкнуты до конца торможения.
| МНОГОУРОВНЕВЫЙ АВТОНОМНЫЙ ИНВЕРТОР ФАЗНЫХ НАПРЯЖЕНИЙ | 2001 |
|
RU2204880C2 |
| МНОГОУРОВНЕВЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2002 |
|
RU2259628C2 |
| СТАТИЧЕСКИЙ МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПИТАНИЯ АСИНХРОННЫХ И СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2005 |
|
RU2303851C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ ПУСКОМ И ТОРМОЖЕНИЕМ АСИНХРОНИЗИРОВАННОЙ МАШИНЫ | 2011 |
|
RU2466492C1 |
| US 4697130 A, 29.09.1987 | |||
| Машина для размола вулканизированной резины | 1954 |
|
SU99661A1 |
| US 6262555 B1, 17.07.2001 | |||
| US 2001019253 A1, 06.09.2001 | |||
| US 20060274560 A1, 07.12.2006. | |||

